
The Real-Time Detection of Vertical Displacements by Low-Cost GNSS Receivers Using Precise Point Positioning


Abstract
:1. Introduction
2. Materials and Methods
2.1. Precise Point Positioning
- —ionosphere-free linear combination of code-phase observations [m];
- —ionosphere-free linear combination of carrier-phase observations [m];
- s—number of satellites;
- —code- and carrier-phase observations for both frequencies [m];
- —carrier frequency [Hz];
- —geometrical range from the receiver to the antenna [m];
- —the vacuum speed of light [m/s];
- —satellite and receiver clock errors [s];
- —the signal path delay due to the neutral atmosphere [m];
- —phase ambiguity parameter in ionosphere-free combination [cyc.];
- —carrier-phase wavelength in ionosphere-free combination [m];
- —noise measurement in code- and carrier-phase observations [m];
- —vector of angular coefficients [.];
- —vector of corrections for the receiver’s position [m];
- /—code- and carrier-phase corrections for the receiver, satellite, and tidal effects in ionosphere-free combination [m].
- —original length of signal for i frequency [m];
- —integer phase ambiguity parameter;
- —code- and carrier-phase corrections for the receiver, satellite, and tidal effects for i-th frequency [m];
- —slant ionospheric delay [m].
2.2. Low-Cost GNSS Hardware
2.3. Butterworth Filter
- —the frequency response;
- n—order of the filter;
- —operating frequency of the circuit;
- —cut-off frequency;
- ε—maximum passband gain.
2.4. GNSS Data Processing
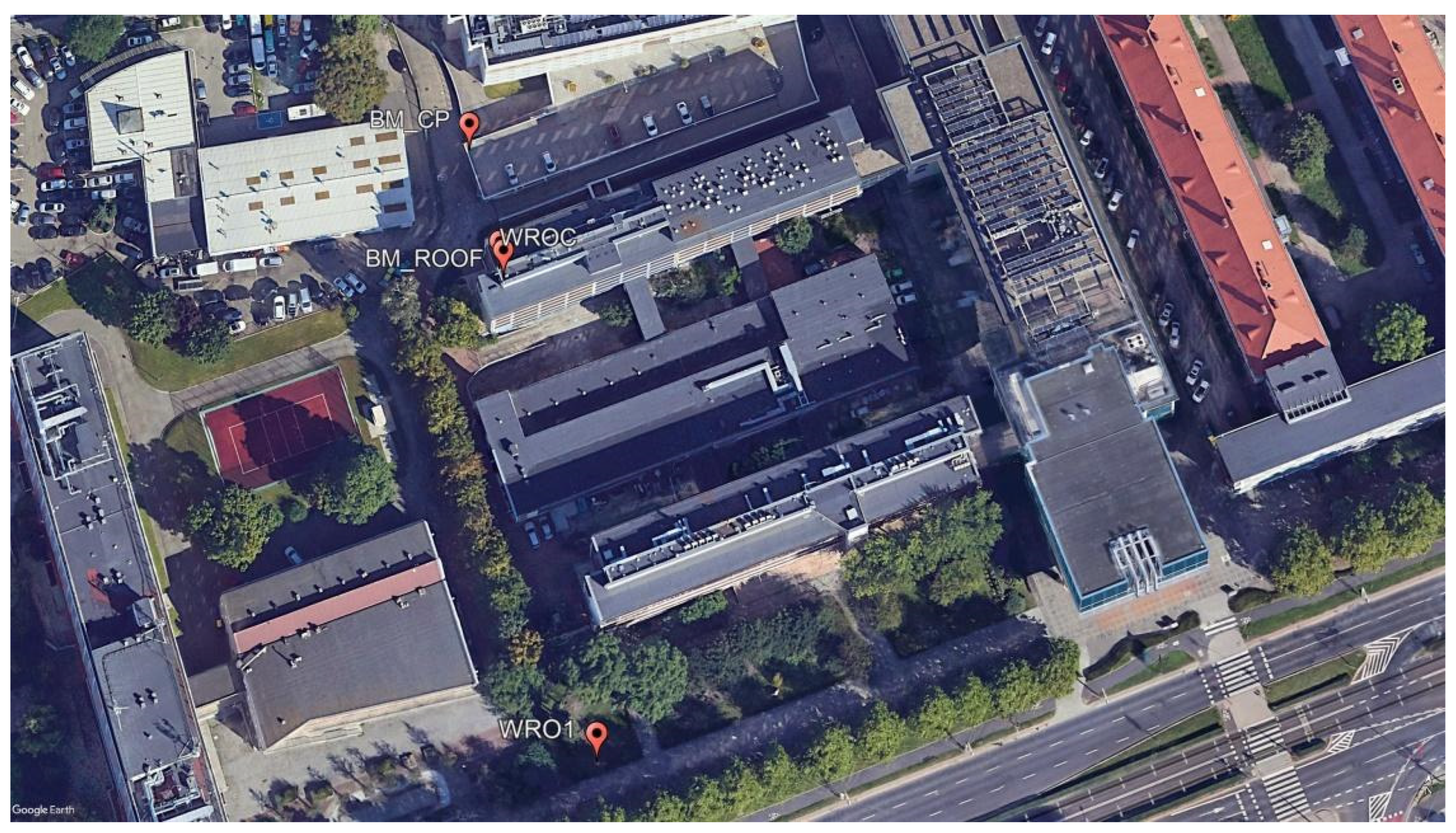
2.5. Field Work
2.6. Time-Series Variants
3. Results
3.1. GNSS Levelling
3.2. Displacement Detection
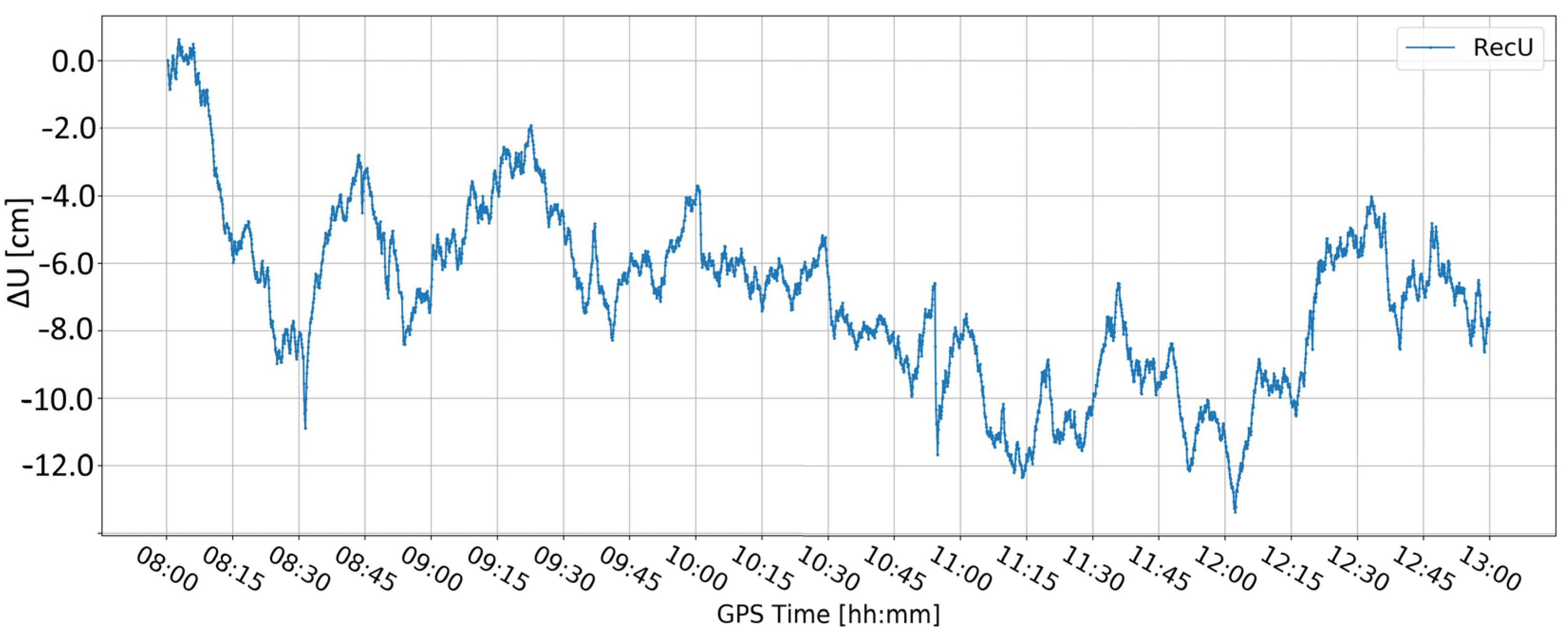
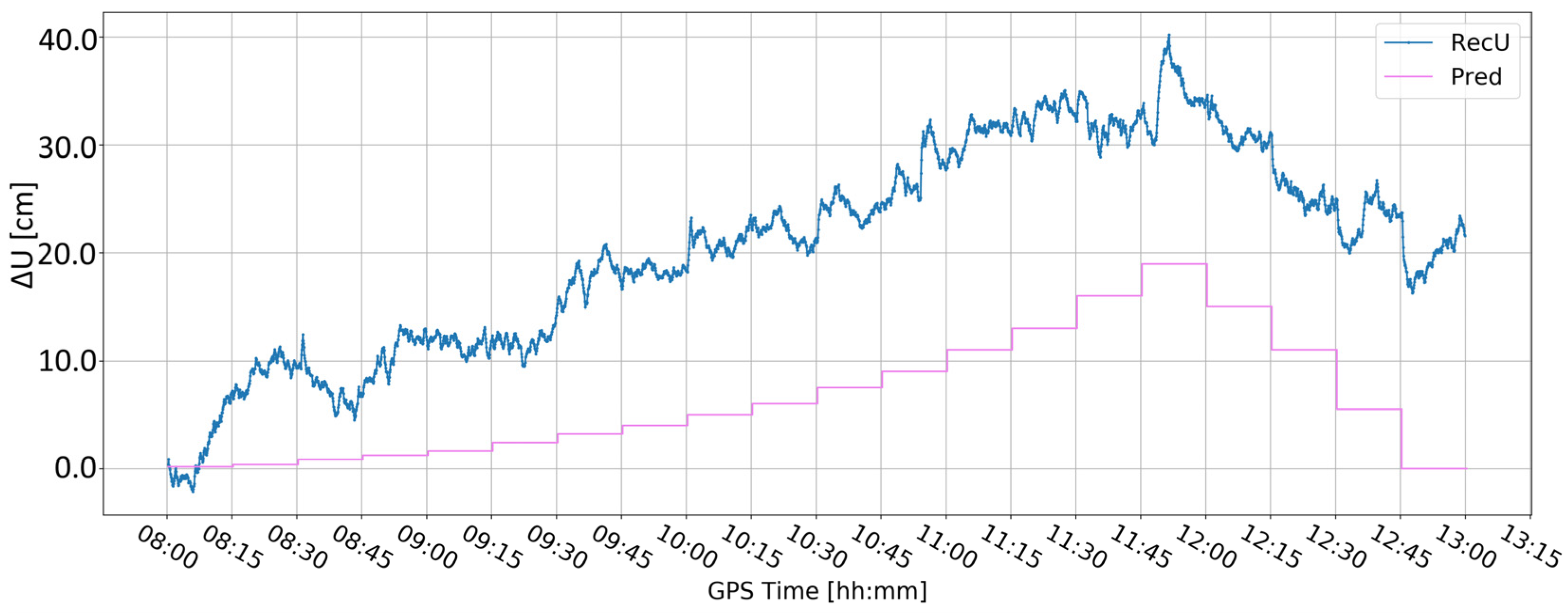
3.2.1. Impact of Selected Processing Parameters on Coordinate Time Series
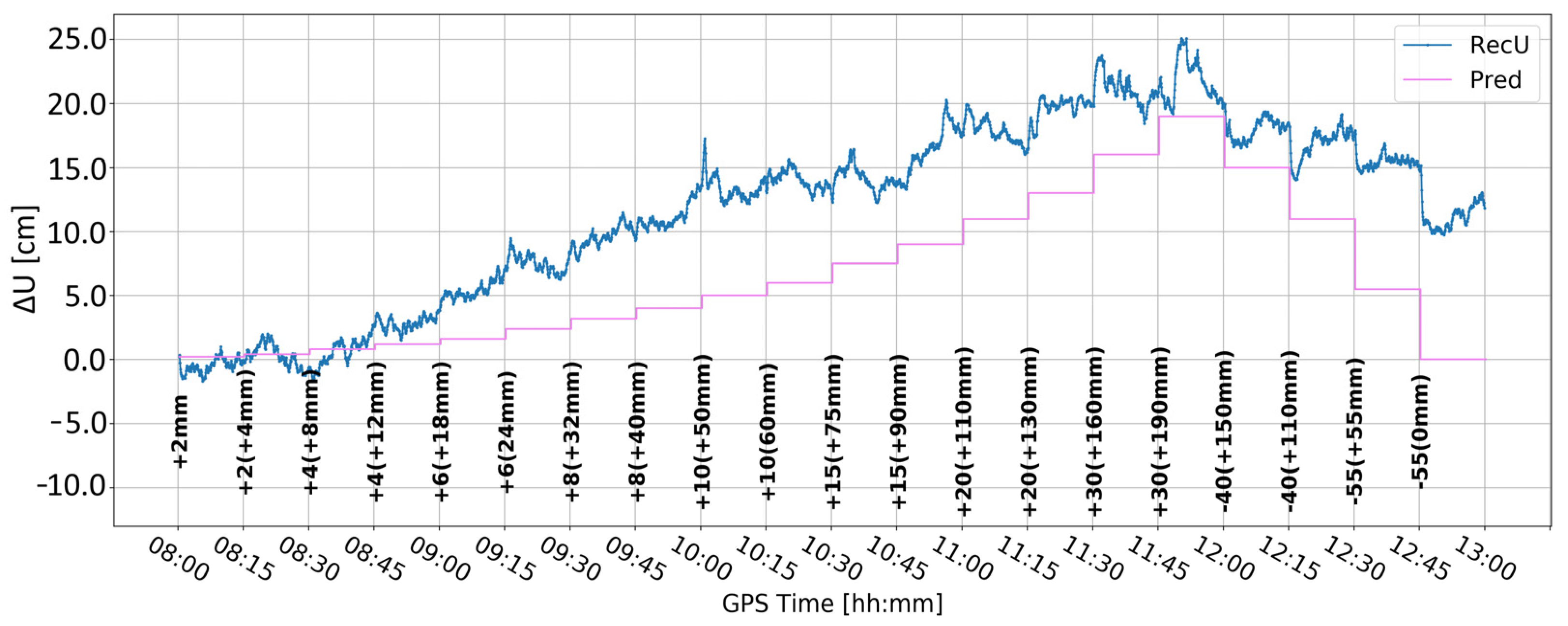
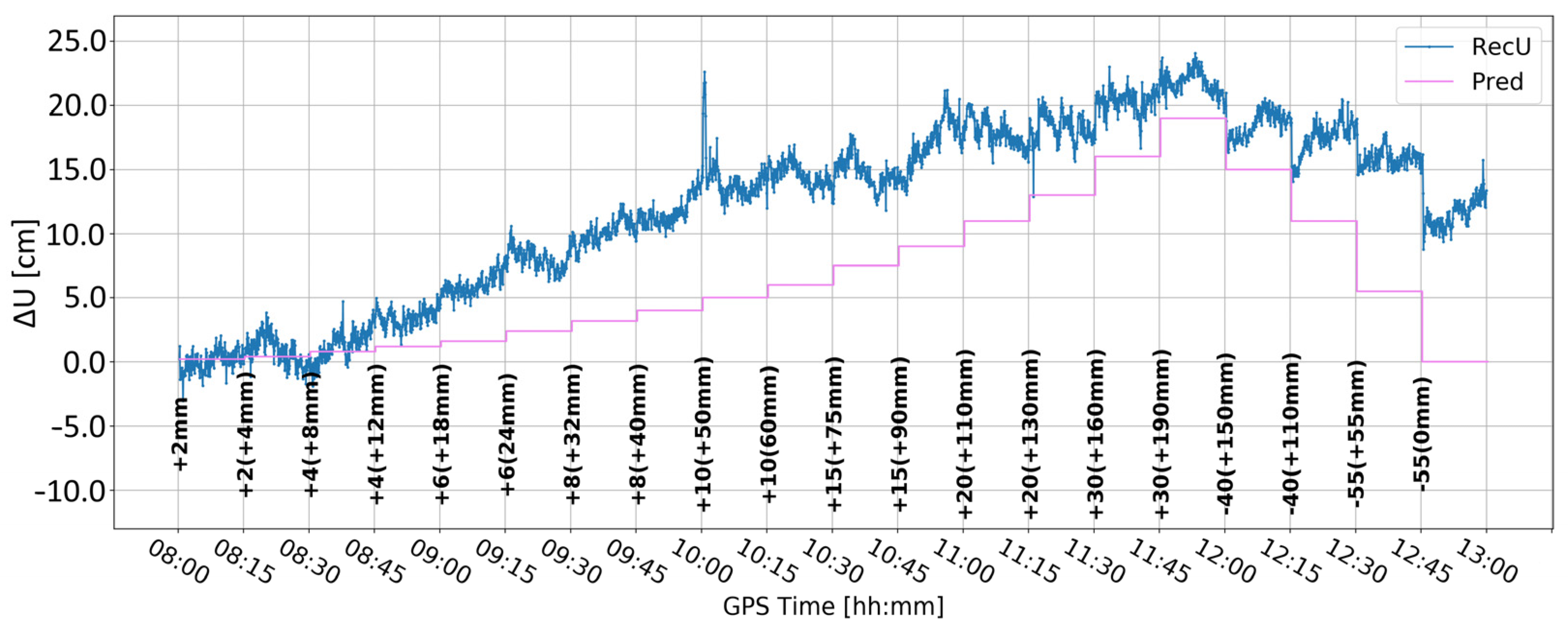
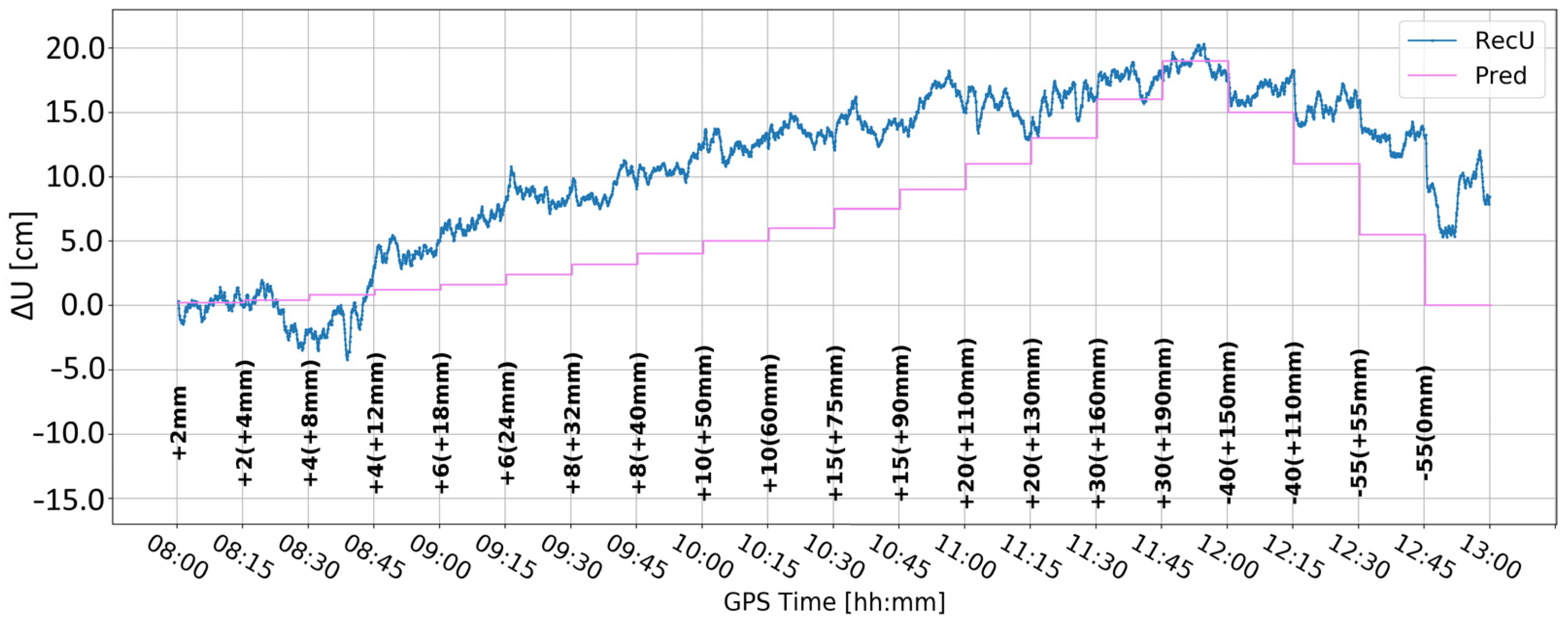
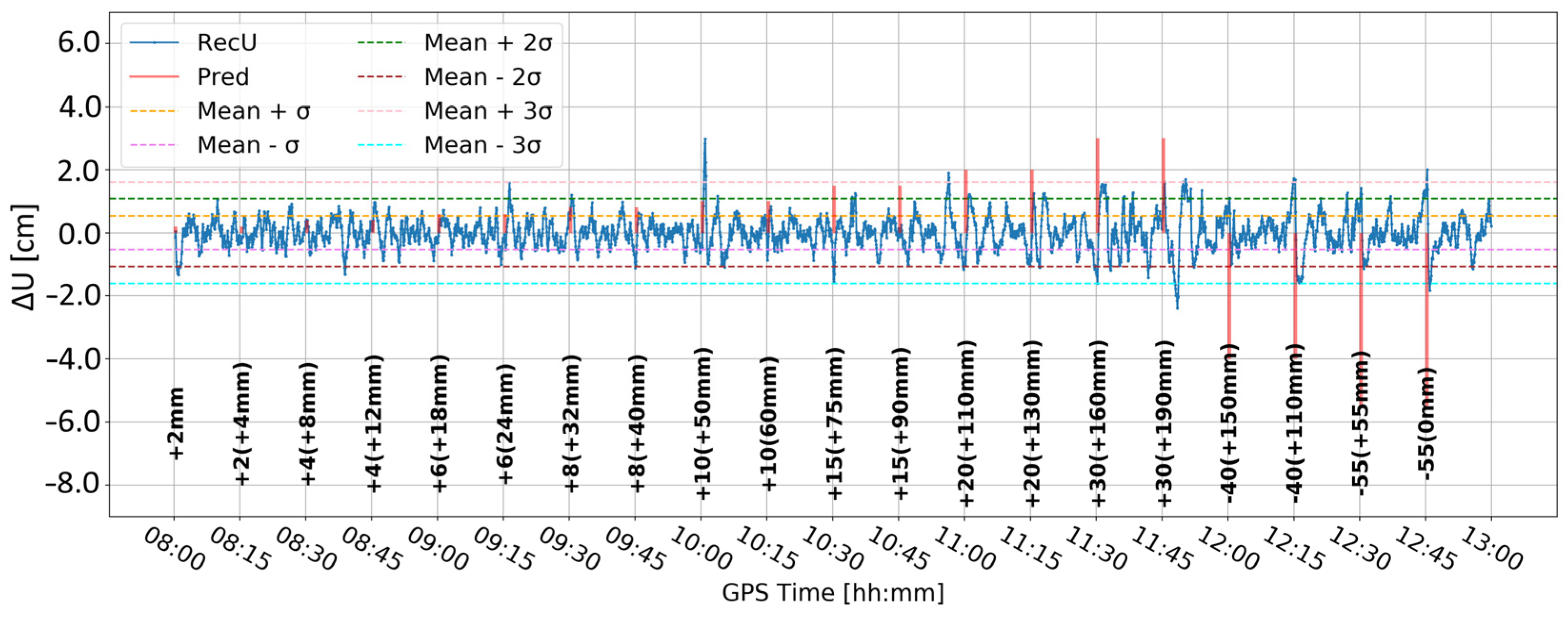
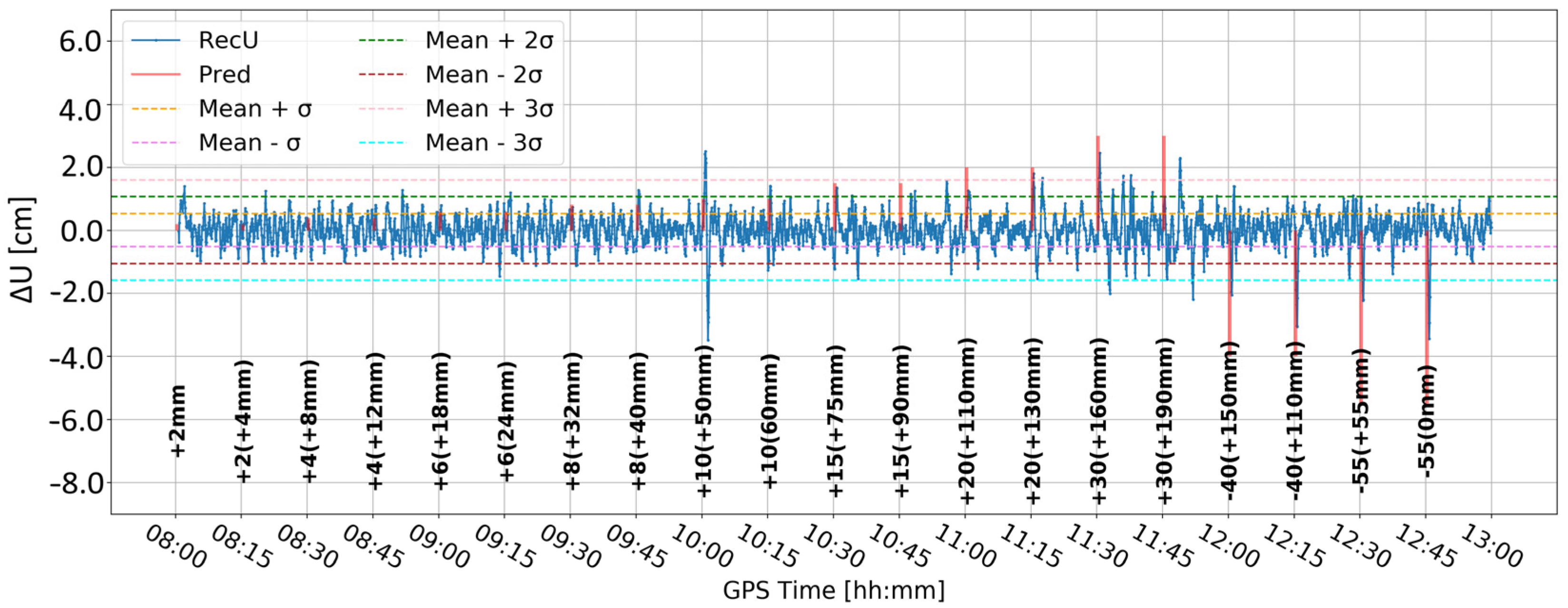
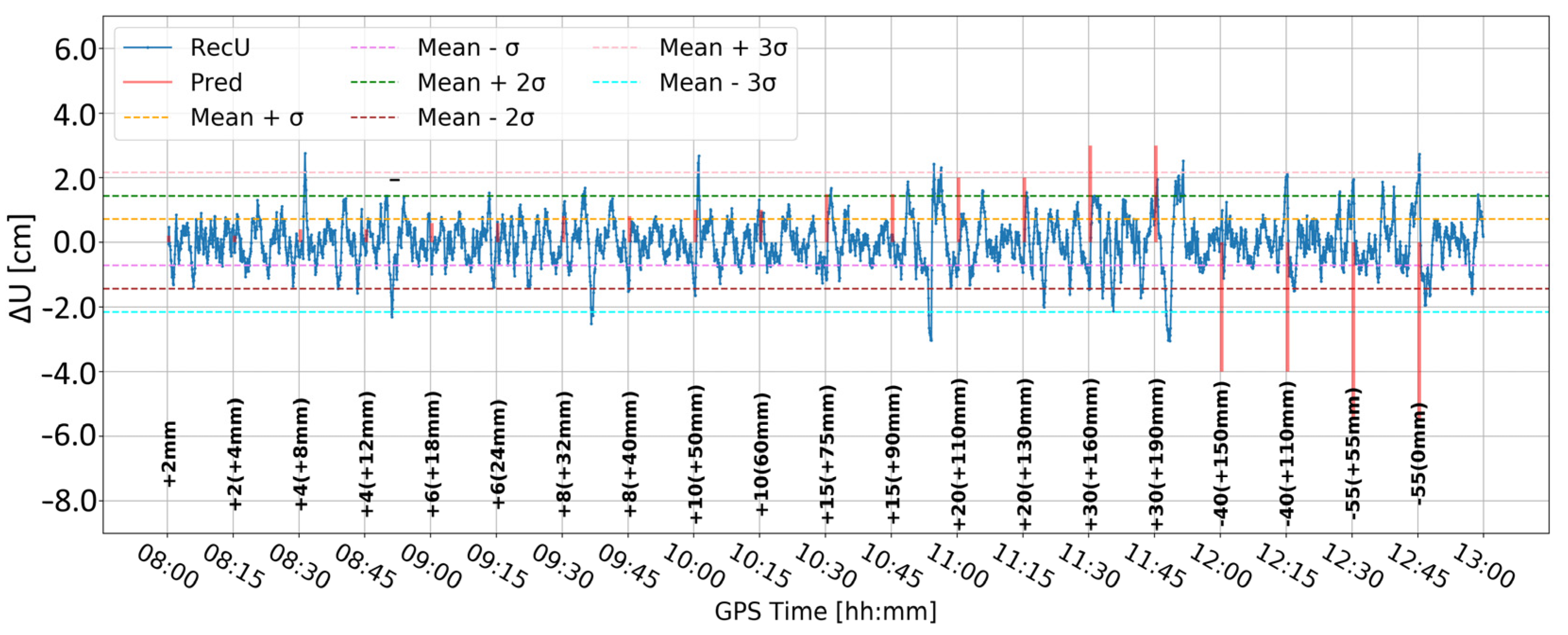
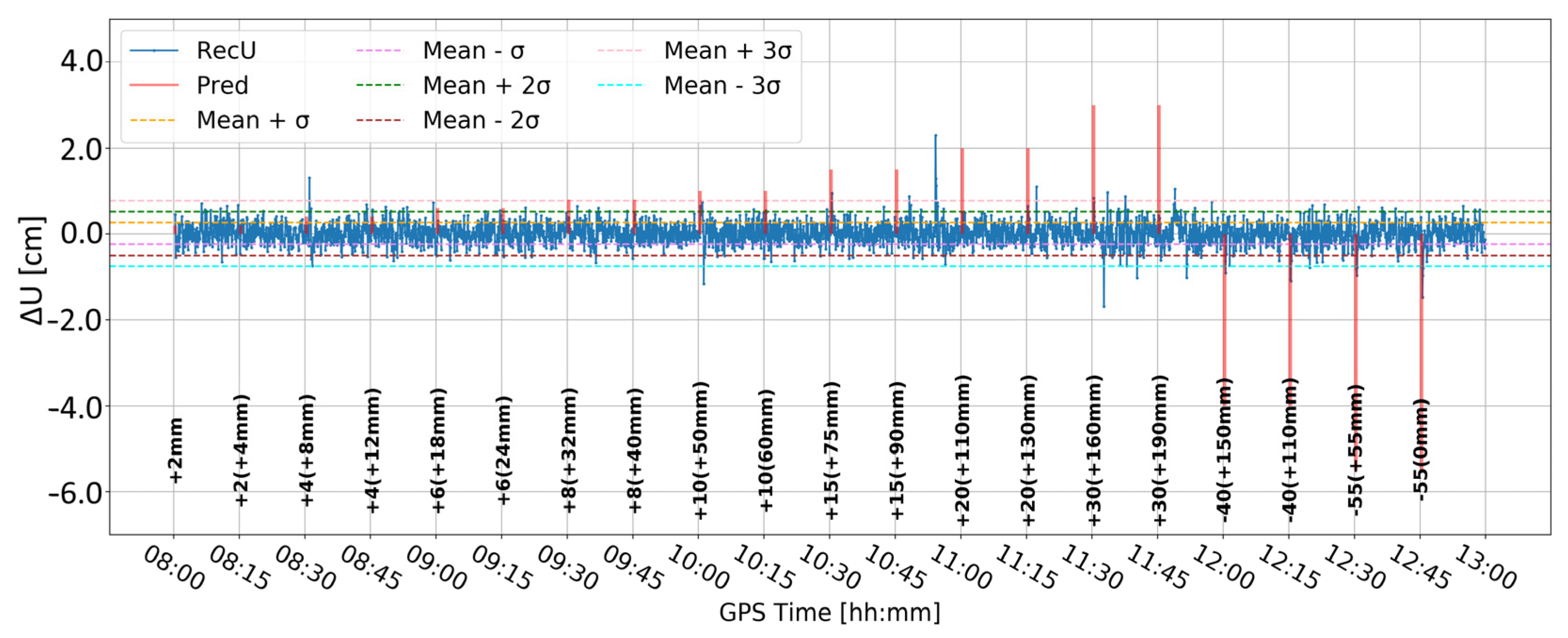
3.2.2. Time-Series Analysis
3.2.3. Classification of Events
- Detected (DET.)—when displacement was simulated and a corresponding peak was detected by the algorithm;
- False alarm (F.A.)—when a peak was detected by the algorithm but there was no simulated displacement at this time;
- Undetected (UNDET.)—when the displacement was simulated, but it was not detected by the algorithm; this can be easily calculated by subtracting DET. from the total number of simulated displacements (20).
4. Summary
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gyagenda, N.; Hatilima, J.V.; Roth, H.; Zhmud, V. A Review of GNSS-Independent UAV Navigation Techniques. Rob. Auton. Syst. 2022, 152, 104069. [Google Scholar] [CrossRef]
- Erdelić, M.; Carić, T.; Ivanjko, E.; Jelušić, N. Classification of Travel Modes Using Streaming GNSS Data. Transp. Res. Procedia 2019, 40, 209–216. [Google Scholar] [CrossRef]
- Magiera, W.; Vārna, I.; Mitrofanovs, I.; Silabrieds, G.; Krawczyk, A.; Skorupa, B.; Apollo, M.; Maciuk, K. Accuracy of Code GNSS Receivers under Various Conditions. Remote Sens. 2022, 14, 2615. [Google Scholar] [CrossRef]
- Grzegorzewski, M.; Cwiklak, J.; Jafernik, H.; Fellner, A. GNSS for an Aviation. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2008, 2, 345–350. [Google Scholar]
- Lygouras, E.; Santavas, N.; Taitzoglou, A.; Tarchanidis, K.; Mitropoulos, A.; Gasteratos, A. Unsupervised Human Detection with an Embedded Vision System on a Fully Autonomous UAV for Search and Rescue Operations. Sensors 2019, 19, 3542. [Google Scholar] [CrossRef] [PubMed]
- Hernández-Pajares, M.; Olivares-Pulido, G.; Graffigna, V.; García-Rigo, A.; Lyu, H.; Roma-Dollase, D.; de Lacy, M.; Fernández-Prades, C.; Arribas, J.; Majoral, M.; et al. Wide-Area GNSS Corrections for Precise Positioning and Navigation in Agriculture. Remote Sens. 2022, 14, 3845. [Google Scholar] [CrossRef]
- Maciuk, K. The Study of Seasonal Changes of Permanent Stations Coordinates Based on Weekly EPN Solutions. Artif. Satell. 2016, 51, 1–18. [Google Scholar] [CrossRef]
- Savchyn, I. Analysis of Recent African Tectonic Plate System Kinematics Based on GNSS Data. Acta Geodyn. Geomater. 2023, 20, 19–28. [Google Scholar] [CrossRef]
- Kudłacik, I.; Kapłon, J.; Kazmierski, K.; Fortunato, M.; Crespi, M. First Feasibility Demonstration of GNSS-Seismology for Anthropogenic Earthquakes Detection. Sci. Rep. 2023, 13, 20905. [Google Scholar] [CrossRef]
- Aggrey, J.; Bisnath, S. Improving GNSS PPP Convergence: The Case of Atmospheric-Constrained, Multi-GNSS PPP-AR. Sensors 2019, 19, 587. [Google Scholar] [CrossRef]
- Jackson, J.; Saborio, R.; Anas Ghazanfar, S.; Gebre-Egziabher, D.; Brian, D. Evaluation of Low-Cost, Centimeter-Level Accuracy OEM GNSS Receivers. Minnesota Departament of Transportation. 2018. Available online: https://mdl.mndot.gov/items/201810 (accessed on 31 July 2024).
- Wielgocka, N.; Hadas, T.; Kaczmarek, A.; Marut, G. Feasibility of Using Low-Cost Dual-Frequency GNSS Receivers for Land Surveying. Sensors 2021, 21, 1956. [Google Scholar] [CrossRef] [PubMed]
- Krzan, G.; Dawidowicz, K.; Stępniak, K.; Świątek, K. Determining Normal Heights with the Use of Precise Point Positioning. Surv. Rev. 2017, 49, 259–267. [Google Scholar] [CrossRef]
- Karabulut, F.; Aykut, N.O.; Akpinar, B.; Oku Topal, G.; Çakmak, Z.B.; Doran, B.; Dindar, A.A.; Yiğit, C.Ö.; Karadeniz, B.; İnam, İ.E. The Positioning Performance of Low-Cost Gnss Receivers in Precise Point Positioning Method. Adv. Geod. Geoinf. 2022, 71, e29. [Google Scholar] [CrossRef]
- Rizos, C. Network RTK Research and Implementation: A Geodetic Perspective. J. Glob. Position. Syst. 2002, 1, 144–150. [Google Scholar] [CrossRef]
- Yasyukevich, Y.V.; Zatolokin, D.; Padokhin, A.; Wang, N.; Nava, B.; Li, Z.; Yuan, Y.; Yasyukevich, A.; Chen, C.; Vesnin, A. Klobuchar, NeQuickG, BDGIM, GLONASS, IRI-2016, IRI-2012, IRI-Plas, NeQuick2, and GEMTEC Ionospheric Models: A Comparison in Total Electron Content and Positioning Domains. Sensors 2023, 23, 4773. [Google Scholar] [CrossRef] [PubMed]
- Witchayangkoon, B. Elements of GPS Precise Point Positioning; The University of Maine: Orono, ME, USA, 2000. [Google Scholar] [CrossRef]
- Kalita, J. Analysis of Factors That Influence the Quality of Precise Point Positioning Method. Ph.D. Thesis, University of Warmia and Mazury in Olsztyn, Olsztyn, Poland, 2017. [Google Scholar]
- Szołucha, M.; Kroszczyński, K.; Kiliszek, D. Accuracy of Precise Point Positioning (PPP) with the Use of Different International GNSS Service (IGS) Products and Stochastic Modelling. Geod. Cartogr. 2018, 67, 207. [Google Scholar] [CrossRef]
- Mendez Astudillo, J.; Lau, L.; Tang, Y.-T.; Moore, T. Analysing the Zenith Tropospheric Delay Estimates in On-Line Precise Point Positioning (PPP) Services and PPP Software Packages. Sensors 2018, 18, 580. [Google Scholar] [CrossRef]
- Grayson, B.; Penna, N.T.; Mills, J.P.; Grant, D.S. GPS Precise Point Positioning for UAV Photogrammetry. Photogramm. Rec. 2018, 33, 427–447. [Google Scholar] [CrossRef]
- Guo, J.; Li, X.; Li, Z.; Hu, L.; Yang, G.; Zhao, C.; Fairbairn, D.; Watson, D.; Ge, M. Multi-GNSS Precise Point Positioning for Precision Agriculture. Precis. Agric. 2018, 19, 895–911. [Google Scholar] [CrossRef]
- Tang, X.; Roberts, G.W.; Li, X.; Hancock, C.M. Real-Time Kinematic PPP GPS for Structure Monitoring Applied on the Severn Suspension Bridge, UK. Adv. Sp. Res. 2017, 60, 925–937. [Google Scholar] [CrossRef]
- Lin, C.; Wu, G.; Feng, X.; Li, D.; Yu, Z.; Wang, X.; Gao, Y.; Guo, J.; Wen, X.; Jian, W. Application of Multi-System Combination Precise Point Positioning in Landslide Monitoring. Appl. Sci. 2021, 11, 8378. [Google Scholar] [CrossRef]
- Hadas, T.; Bosy, J. IGS RTS Precise Orbits and Clocks Verification and Quality Degradation over Time. GPS Solut. 2015, 19, 93–105. [Google Scholar] [CrossRef]
- Kazmierski, K.; Zajdel, R.; Sośnica, K. Evolution of Orbit and Clock Quality for Real-Time Multi-GNSS Solutions. GPS Solut. 2020, 24, 111. [Google Scholar] [CrossRef]
- Hadaś, T. GNSS-Warp Software for Real-Time Precise Point Positioning. Artif. Satell. 2015, 50, 59–76. [Google Scholar] [CrossRef]
- Li, H.N.; Li, D.S.; Song, G.B. Recent Applications of Fiber Optic Sensors to Health Monitoring in Civil Engineering. Eng. Struct. 2004, 26, 1647–1657. [Google Scholar] [CrossRef]
- Prószyński, W.; Kwaśniak, M. Podstawy Geodezyjnego Wyznaczania Przemieszczeń. Pojęcia i Elementy Metodyki; Oficyna Wydawnicza Politechniki Warszawskiej: Warsaw, Poland, 2015; ISBN 978-83-7814-434-2. [Google Scholar]
- Bryn, M.J.; Afonin, D.A.; Bogomolova, N.N. Geodetic Monitoring of Deformation of Building Surrounding an Underground Construction. Procedia Eng. 2017, 189, 386–392. [Google Scholar] [CrossRef]
- Ozer Yigit, C.; Bezcioglu, M.; Ilci, V.; Murat Ozulu, I.; Metin Alkan, R.; Anil Dindar, A.; Karadeniz, B. Assessment of Real-Time PPP with Trimble RTX Correction Service for Real-Time Dynamic Displacement Monitoring Based on High-Rate GNSS Observations. Measurement 2022, 201, 111704. [Google Scholar] [CrossRef]
- Chu, F.Y.; Chen, Y.W. Monitoring Structural Displacements on a Wall with Five-Constellation Precise Point Positioning: A Position-Constrained Method and the Performance Analyses. Remote Sens. 2023, 15, 1314. [Google Scholar] [CrossRef]
- Bender, L.C.; Howden, S.D.; Dodd, D.; Guinasso, N.L. Wave Heights during Hurricane Katrina: An Evaluation of PPP and PPK Measurements of the Vertical Displacement of the GPS Antenna. J. Atmos. Ocean. Technol. 2010, 27, 1760–1768. [Google Scholar] [CrossRef]
- Yigit, C.O.; Gurlek, E. Experimental Testing of High-Rate GNSS Precise Point Positioning (PPP) Method for Detecting Dynamic Vertical Displacement Response of Engineering Structures. Geomat. Nat. Hazards Risk 2017, 8, 893–904. [Google Scholar] [CrossRef]
- Kaloop, M.R.; Yigit, C.O.; Dindar, A.A.; Elsharawy, M.; Hu, J.W. Evaluation of the High-Rate GNSS-PPP Method for Vertical Structural Motion. Surv. Rev. 2020, 52, 159–171. [Google Scholar] [CrossRef]
- Kowalczyk, K.; Bogusz, J. Application of PPP Solution to Determine the Absolute Vertical Crustal Movements: Case Study for Northeastern Europe. In Proceedings of the 10th International Conference “Environmental Engineering”, Vilnius, Lithuania, 27–28 April 2017; pp. 27–28. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, Q.; Zhang, M.; Zhang, S.; Qu, W.; Tu, R.; Liu, Z. Extraction of Ocean Tide Semidiurnal Constituents’ Vertical Displacement Parameters Based on GPS PPP and Harmonic Analysis Method. In Proceedings of the China Satellite Navigation Conference (CSNC) 2014 Proceedings: Volume II, Nanjing, China, 21–23 May 2014; Volume 304, pp. 341–350. [Google Scholar] [CrossRef]
- Akpınar, B. Positioning Performance of GNSS-PPP and PPP-AR Methods for Determining the Vertical Displacements. Surv. Rev. 2023, 55, 68–74. [Google Scholar] [CrossRef]
- Janos, D.; Kuras, P. Evaluation of Low-Cost GNSS Receiver under Demanding Conditions in RTK Network Mode. Sensors 2021, 21, 5552. [Google Scholar] [CrossRef]
- Garrido-Carretero, M.S.; de Lacy-Pérez de los Cobos, M.C.; Borque-Arancón, M.J.; Ruiz-Armenteros, A.M.; Moreno-Guerrero, R.; Gil-Cruz, A.J. Low-Cost GNSS Receiver in RTK Positioning under the Standard ISO-17123-8: A Feasible Option in Geomatics. Measurement 2019, 137, 168–178. [Google Scholar] [CrossRef]
- Romero-Andrade, R.; Trejo-Soto, M.E.; Vázquez-Ontiveros, J.R.; Hernández-Andrade, D.; Cabanillas-Zavala, J.L. Sampling Rate Impact on Precise Point Positioning with a Low-Cost GNSS Receiver. Appl. Sci. 2021, 11, 7669. [Google Scholar] [CrossRef]
- Marut, G.; Hadas, T.; Kaplon, J.; Trzcina, E.; Rohm, W. Monitoring the Water Vapor Content at High Spatio-Temporal Resolution Using a Network of Low-Cost Multi-GNSS Receivers. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5804614. [Google Scholar] [CrossRef]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Kaplan, E.; Hegarty, C. Understanding GPS: Principles and Applications; Kaplan, E., Hegarty, C., Eds.; Artech House: Norwood, MA, USA, 2005; ISBN 978-1580538947. [Google Scholar]
- Johnston, G.; Riddell, A.; Hausler, G. The International GNSS Service. In Springer Handbook of Global Navigation Satellite Systems; Teunissen, P.J.G., Montenbruck, O., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 967–982. ISBN 978-3-319-42928-1. [Google Scholar]
- Katsigianni, G.; Perosanz, F.; Loyer, S.; Gupta, M. Galileo Millimeter-Level Kinematic Precise Point Positioning with Ambiguity Resolution. Earth Planets Sp. 2019, 71, 76. [Google Scholar] [CrossRef]
- Héroux, P.; Kouba, J. GPS Precise Point Positioning Using IGS Orbit Products. Phys. Chem. Earth Part A Solid Earth Geod. 2001, 26, 573–578. [Google Scholar] [CrossRef]
- Schönemann, E.; Becker, M.; Springer, T. A New Approach for GNSS Analysis in a Multi-GNSS and Multi-Signal Environment. J. Geod. Sci. 2011, 1, 204–214. [Google Scholar] [CrossRef]
- Schönemann, E. Analysis of GNSS Raw Observations in PPP Solutions; Schriftenr; Technische Universität Darmstadt: Darmstadt, Germany, 2014; ISBN 978-3-935631-31-0. [Google Scholar]
- Blewitt, G. Carrier Phase Ambiguity Resolution for the Global Positioning System Applied to Geodetic Baselines up to 2000 Km. J. Geophys. Res. Solid Earth 1989, 94, 10187–10203. [Google Scholar] [CrossRef]
- Ho, Q.-D.; Gao, Y.; Le-Ngoc, T. Challenges and Research Opportunities in Wireless Communication Networks for Smart Grid. IEEE Wirel. Commun. 2013, 20, 89–95. [Google Scholar] [CrossRef]
- Butterworth, S. On the Theory of Filter Amplifiers. Exp. Wirel. Wirel. Eng. 1930, 7, 536–541. [Google Scholar]
- Thompson, M.T. Analog Low-Pass Filters. In Intuitive Analog Circuit Design; Elsevier: Amsterdam, The Netherlands, 2014; pp. 531–583. [Google Scholar] [CrossRef]
- Porang, T.; Maneetham, D.; Aung, M.M. Kalman and Butterworth Filter Comparison for GPS and Magnetometer Sensors. In Proceedings of the IEEE 8th Information Technology International Seminar, Surabaya, Indonesia, 19–21 October 2022; ITIS 2022. pp. 32–36. [Google Scholar]
- Sandru, F.D.; Nanu, S.; Silea, I.; Miclea, R.C. Kalman and Butterworth Filtering for GNSS/INS Data. In Proceedings of the 2016 12th International Symposium on Electronics and Telecommunications, Timisoara, Romania, 27–28 October 2016; ISETC 2016; Conference Proceedings. pp. 257–260. [Google Scholar]
- Kudłacik, I. Research on Natural and Anthropogenic Seismicity with the High-Frequency GNSS Observations. Ph.D. Thesis, Wrocław University of Environmental and Life Sciences, Wrocław, Poland, 2023. [Google Scholar]
- Kudłacik, I. Seismic Phenomena in Tke Light High-Rate GPS Precise Point Positioning Results. Acta Geodyn. Geomater. 2019, 16, 99–112. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems; Teunissen, P.J.G., Montenbruck, O., Eds.; Springer International Publishing: Cham, Switzerland, 2017; ISBN 978-3-319-42926-7. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Point Name | H (m) |
|---|---|
| WRO1 | 117.1331 |
| WROC (measured) | 140.7275 |
| WROC (catalog) | 140.7288 |
| Source | Point | h [m] | H [m] | 1σ [mm] | N [m] |
|---|---|---|---|---|---|
| LGO | WRO1 | 157.2369 | 117.1460 | ±13 | 40.0909 |
| BM_ROOF | 180.1167 | 140.0281 | ±6 | 40.0886 | |
| BM_CP | 162.7319 | 122.6432 | ±3 | 40.0887 | |
| POZGEO | WRO1 | 157.2250 | 117.1338 | ±11 | 40.0912 |
| BM_ROOF | 180.1240 | 140.0358 | ±12 | 40.0882 | |
| BM_CP | 162.7150 | 122.6268 | ±12 | 40.0882 | |
| CSRS-PPP | WRO1 | 157.2710 | 117.1804 | ±18 | 40.0906 |
| BM_ROOF | 180.1630 | 140.0747 | ±9 | 40.0883 | |
| BM_CP | 162.7730 | 122.6846 | ±14 | 40.0884 | |
| GNSS-WARP | WRO1 | 157.2612 | 117.1706 | ±6 | 40.0906 |
| BM_ROOF | 180.1486 | 140.0603 | ±5 | 40.0883 | |
| BM_CP | 162.7443 | 122.6559 | ±7 | 40.0884 |
| Point | Height Type | 1st Survey [m] | 2nd Survey [m] | Mean [m] | N [m] |
|---|---|---|---|---|---|
| WRO1 WRO1 | Normal | 117.1840 | 117.1930 | 117.1890 | 40.0909 |
| Ellipsoidal | 157.2830 | 157.2750 | 157.2790 | ||
| BM_ROOF BM_ROOF | Normal | 140.0310 | 140.0470 | 140.0390 | 40.0891 |
| Ellipsoidal | 180.1200 | 180.1360 | 180.1280 | ||
| BM_CP BM_CP | Normal | 122.6480 | 122.6610 | 122.6550 | 40.0886 |
| Ellipsoidal | 162.7368 | 162.7494 | 162.7430 |
| 1σ | 2σ | 3σ | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| DET. | UNDET. | F.A. | DET. | UNDET. | F.A. | DET. | UNDET. | F.A. | ||
| A | Number | 6 | 14 | 121 | 9 | 11 | 29 | 3 | 17 | 5 |
| Ratio | 0.05 | 0.70 | 0.95 | 0.24 | 0.55 | 0.76 | 0.38 | 0.85 | 0.63 | |
| B | Number | 12 | 8 | 191 | 16 | 4 | 73 | 10 | 10 | 14 |
| Ratio | 0.06 | 0.40 | 0.94 | 0.18 | 0.20 | 0.82 | 0.42 | 0.50 | 0.58 | |
| C | Number | 11 | 9 | 194 | 16 | 4 | 70 | 10 | 10 | 15 |
| Ratio | 0.05 | 0.45 | 0.95 | 0.19 | 0.20 | 0.81 | 0.40 | 0.50 | 0.60 | |
| D | Number | 16 | 4 | 164 | 12 | 8 | 44 | 7 | 13 | 6 |
| Ratio | 0.09 | 0.20 | 0.91 | 0.21 | 0.40 | 0.79 | 0.54 | 0.65 | 0.46 | |
| E | Number | 14 | 6 | 166 | 11 | 9 | 34 | 7 | 13 | 6 |
| Ratio | 0.08 | 0.30 | 0.92 | 0.24 | 0.45 | 0.76 | 0.54 | 0.65 | 0.46 | |
| F | Number | 7 | 13 | 123 | 5 | 15 | 30 | 1 | 19 | 9 |
| Ratio | 0.05 | 0.65 | 0.95 | 0.14 | 0.75 | 0.86 | 0.10 | 0.95 | 0.90 | |
| G | Number | 13 | 7 | 186 | 15 | 5 | 79 | 6 | 14 | 12 |
| Ratio | 0.07 | 0.35 | 0.93 | 0.16 | 0.25 | 0.84 | 0.33 | 0.70 | 0.67 | |
| H | Number | 13 | 7 | 193 | 16 | 4 | 79 | 7 | 13 | 13 |
| Ratio | 0.06 | 0.35 | 0.94 | 0.17 | 0.20 | 0.83 | 0.35 | 0.65 | 0.65 | |
| I | Number | 11 | 9 | 163 | 11 | 9 | 38 | 6 | 14 | 6 |
| Ratio | 0.06 | 0.45 | 0.94 | 0.22 | 0.45 | 0.78 | 0.50 | 0.70 | 0.50 | |
| J | Number | 9 | 11 | 163 | 12 | 8 | 42 | 6 | 14 | 10 |
| Ratio | 0.05 | 0.55 | 0.95 | 0.22 | 0.40 | 0.78 | 0.38 | 0.70 | 0.63 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maciejewska, A.; Lackowski, M.; Hadas, T.; Maciuk, K. The Real-Time Detection of Vertical Displacements by Low-Cost GNSS Receivers Using Precise Point Positioning. Sensors 2024, 24, 5599. https://doi.org/10.3390/s24175599
Maciejewska A, Lackowski M, Hadas T, Maciuk K. The Real-Time Detection of Vertical Displacements by Low-Cost GNSS Receivers Using Precise Point Positioning. Sensors. 2024; 24(17):5599. https://doi.org/10.3390/s24175599
Chicago/Turabian StyleMaciejewska, Aleksandra, Maciej Lackowski, Tomasz Hadas, and Kamil Maciuk. 2024. "The Real-Time Detection of Vertical Displacements by Low-Cost GNSS Receivers Using Precise Point Positioning" Sensors 24, no. 17: 5599. https://doi.org/10.3390/s24175599