
Development of Highly Efficient Lamb Wave Transducers toward Dual-Surface Simultaneous Atomization

 , ,
, ,
Abstract
1. Introduction
2. Simulation and Design of SAW Transducers
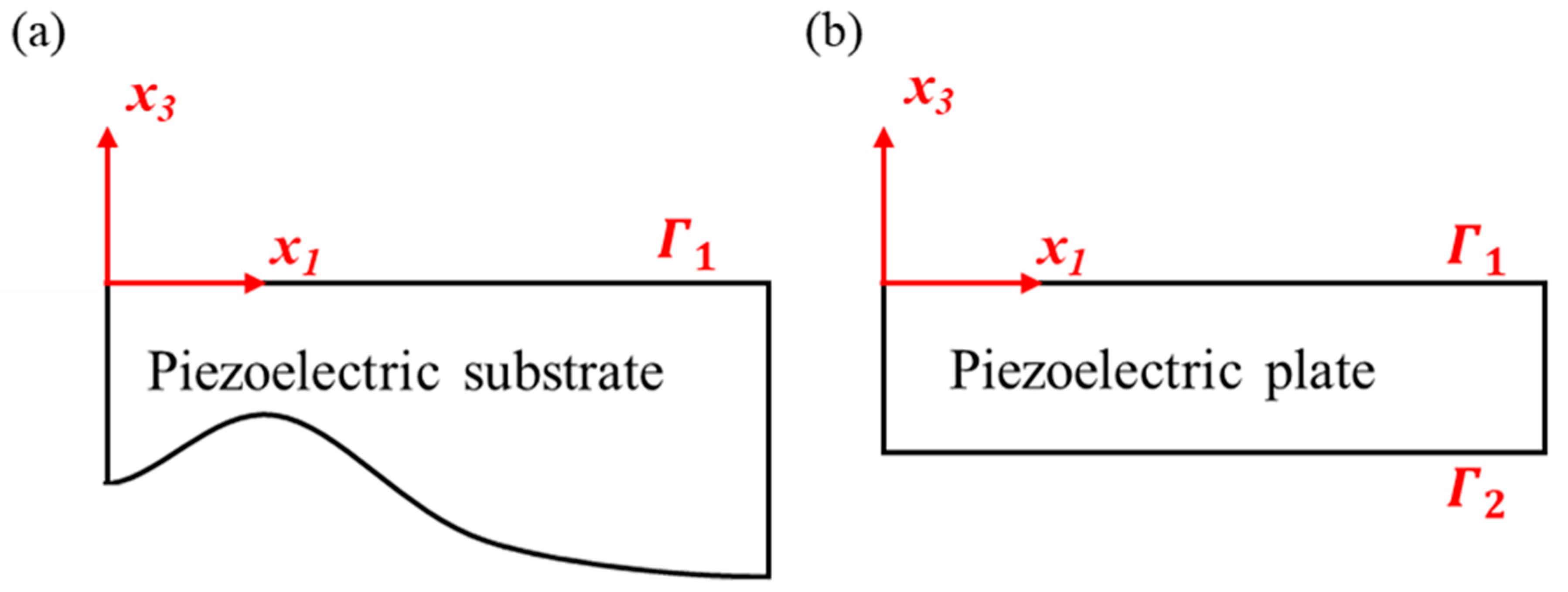
2.1. Governing Equations
2.2. Electromechanical Coupling Coefficient
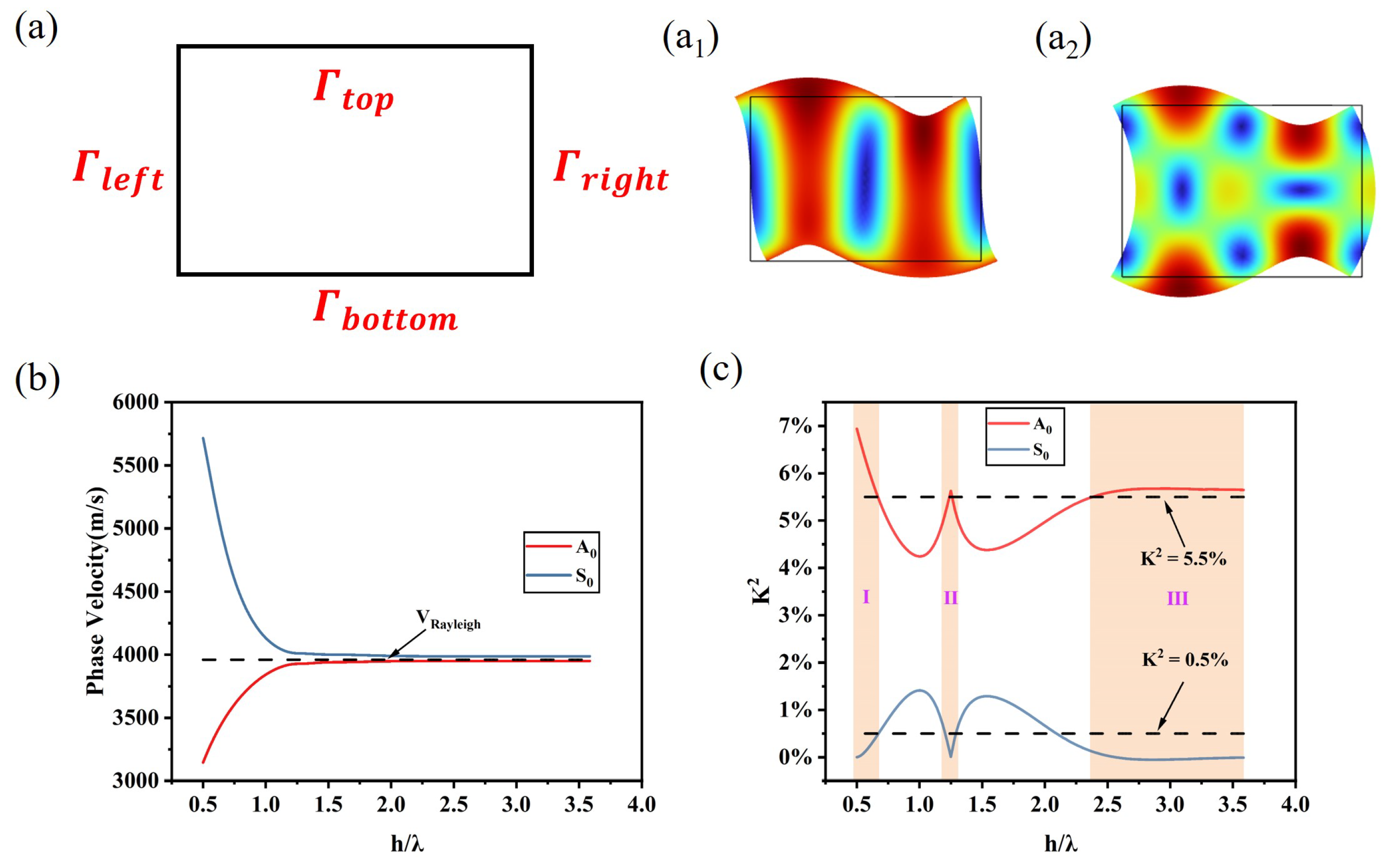
2.3. COMSOL Simulation
2.4. Design of SAW Transducers
3. Experimental Section
3.1. Fabrication of SAW Transducers
3.2. Experimental Setup
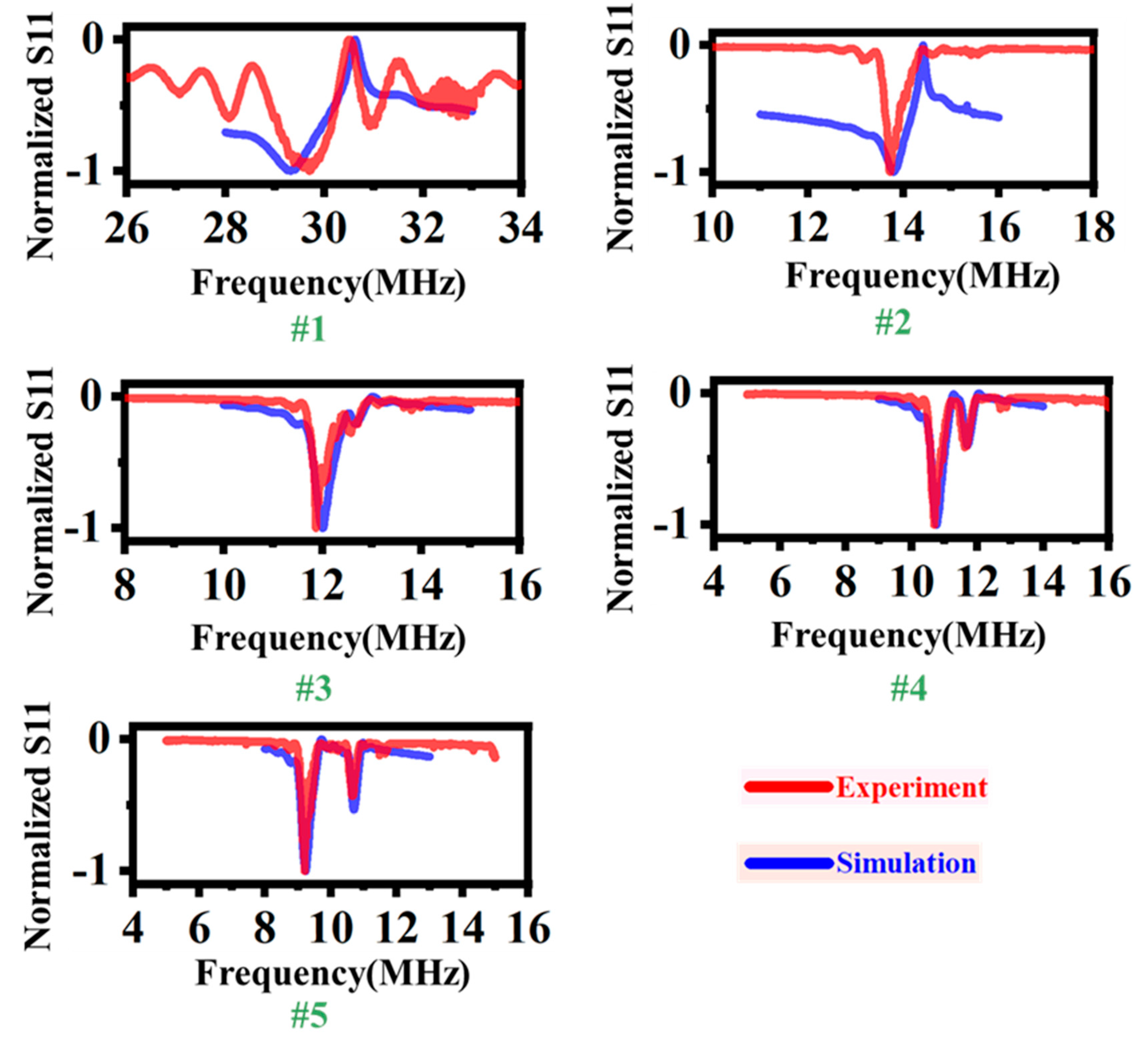
4. Results and Discussion
5. Conclusions
- We perceive that the electromechanical coupling coefficient of A0-mode Lamb waves can be as high as that of Rayleigh waves when the ratio , and in this case, the S0-mode Lamb wave has degenerated due to its being lower than 0.5%.
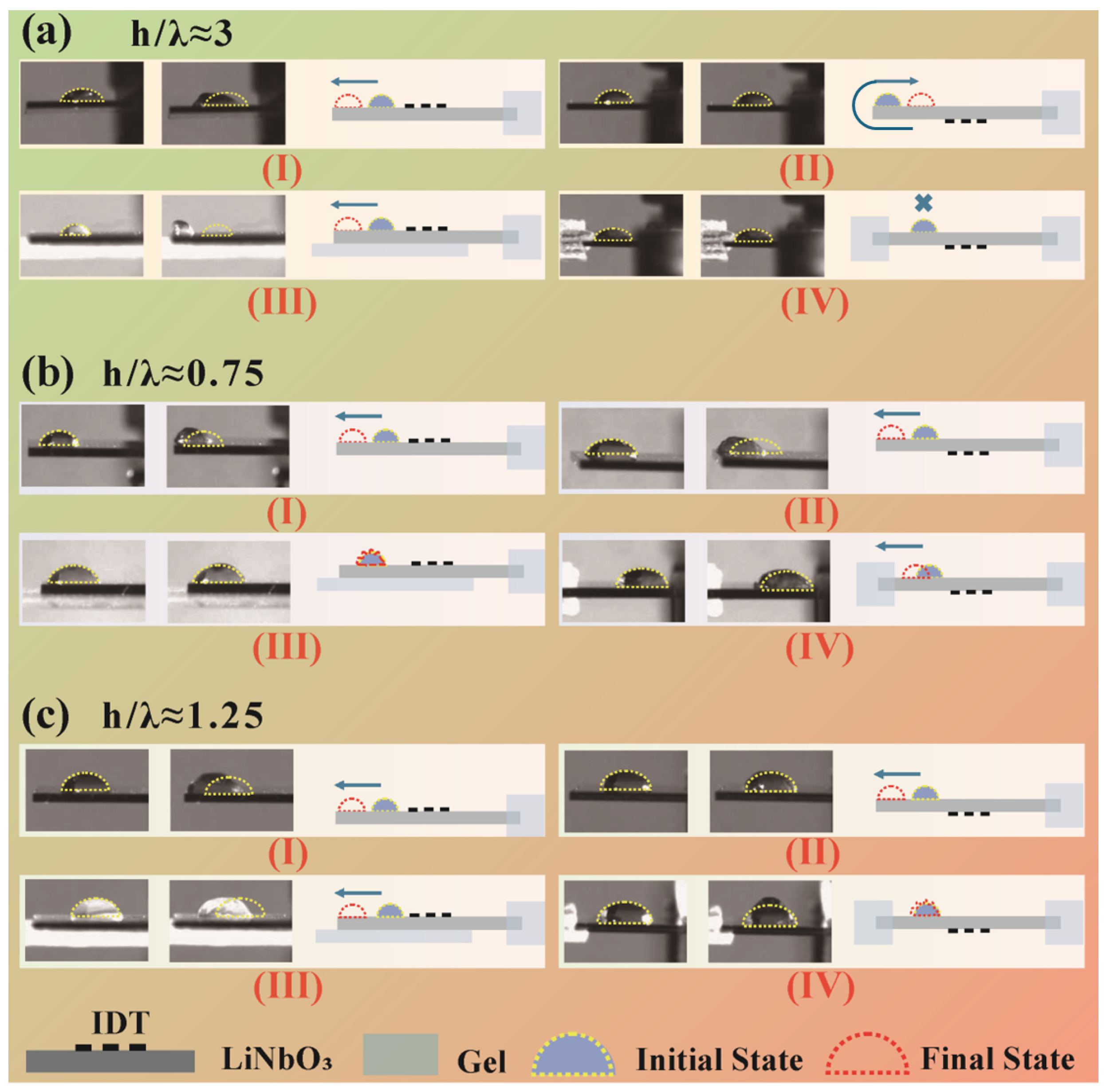
- A0-mode Lamb waves propagation characteristics are not immutable with the change in . When , the acoustic wavelength is smaller than the thickness, which means one whole acoustic wave has not completed its motion, and the bottom surface may hold a stronger driving ability. When , the acoustic wavelength is larger than the thickness, and the completed acoustic waves may have a strengthening driving ability on the top surface.
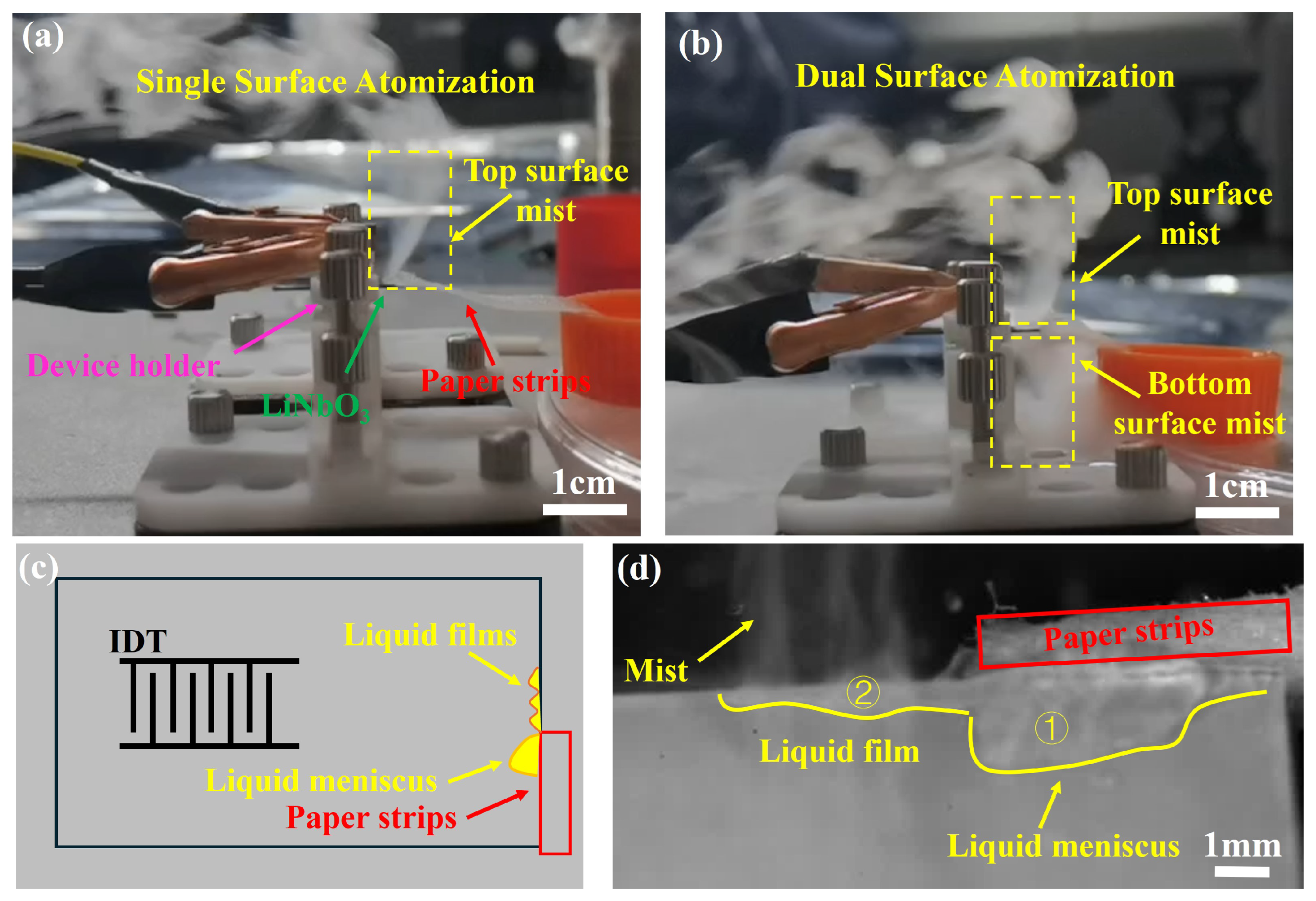
- Compared to Rayleigh waves, Lamb waves can obtain a dual-surface simultaneous atomization phenomenon when putting the paper strips on the outside the IDT aperture, at the edge of the piezoelectric plate. This can be attributed to the fact that the piezoelectric plate can provide a commensurate amplitude acoustic wave vibration on the dual-surface. During the process of dual-surface simultaneous atomization, the liquid thin film is not in front of the bulk liquid meniscus as usual, instead appearing on the inside of the IDT aperture.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| SAW | Surface acoustic wave |
| IDT | Interdigital transducer |
References
- Ding, X.; Li, P.; Lin, S.C.S.; Stratton, Z.S.; Nama, N.; Guo, F.; Slotcavage, D.; Mao, X.; Shi, J.; Costanzo, F.; et al. Surface acoustic wave microfluidics. Lab Chip 2013, 13, 3626–3649. [Google Scholar] [CrossRef] [PubMed]
- Lin, S.C.S.; Mao, X.; Huang, T.J. Surface acoustic wave (SAW) acoustophoresis: Now and beyond. Lab Chip 2012, 12, 2766–2770. [Google Scholar] [CrossRef] [PubMed]
- Ning, J.; Lei, Y.; Hu, H.; Gai, C. A Comprehensive Review of Surface Acoustic Wave-Enabled Acoustic Droplet Ejection Technology and Its Applications. Micromachines 2023, 14, 1543. [Google Scholar] [CrossRef]
- Huang, W.; Yang, Q.; Liao, J.; Ramadan, S.; Fan, X.; Hu, S.; Liu, X.; Luo, J.; Tao, R.; Fu, C. Integrated Rayleigh wave streaming-enhanced sensitivity of shear horizontal surface acoustic wave biosensors. Biosens. Bioelectron. 2024, 247, 115944. [Google Scholar] [CrossRef] [PubMed]
- Masud, A.A.; Liu, J. Ultrasonic surface acoustic wave elastography: A review of basic theories, technical developments, and medical applications. Med. Phys. 2024, 51, 3220–3244. [Google Scholar] [CrossRef] [PubMed]
- Ning, J.; Huang, Q.Y.; Gai, C.H.; Ding, Y.Z.; Zhang, B.; Lei, Y.L.; Wu, Y.; Hu, H. Numerical study of thermocapillary and slip effects on interfacial destabilization under surface acoustic waves. Phys. Fluids 2024, 36, 072009. [Google Scholar] [CrossRef]
- Kong, D.; Wang, Y.; Tsubata, T.; Kurosawa, M.K.; Aoyagi, M. Atomization characteristics of 9.6 MHz directional surface acoustic wave for 1-micron spray system. Sens. Actuators Phys. 2024, 365, 114911. [Google Scholar] [CrossRef]
- Yang, Q.; Huang, W.; Liu, X.; Sami, R.; Fan, X.; Dong, Q.; Luo, J.; Tao, R.; Fu, C. Simple, and highly efficient edge-effect surface acoustic wave atomizer. Ultrasonics 2024, 142, 107359. [Google Scholar] [CrossRef]
- Ali, M.; Lee, S.H.; Cha, B.; Kim, W.; Oyunbaatar, N.E.; Lee, D.W.; Park, J. Acoustofluidic separation of cell-encapsulated droplets based on traveling surface acoustic wave-induced acoustic radiation force. Sens. Actuators Chem. 2024, 415, 135988. [Google Scholar] [CrossRef]
- Han, J.; Hu, H.; Lei, Y.; Huang, Q.; Fu, C.; Gai, C.; Ning, J. Optimization analysis of particle separation parameters for a standing surface acoustic wave acoustofluidic chip. ACS Omega 2022, 8, 311–323. [Google Scholar] [CrossRef]
- Ang, B.; Jirapanjawat, T.; Tay, K.P.; Ashtiani, D.; Greening, C.; Tuck, K.L.; Neild, A.; Cadarso, V.J. Rapid Concentration and Detection of Bacteria in Milk Using a Microfluidic Surface Acoustic Wave Activated Nanosieve. ACS Sens. 2024, 9, 3105–3114. [Google Scholar] [CrossRef] [PubMed]
- Kannan, T. Finite Element Analysis of Surface Acoustic Wave Resonators. Ph.D. Thesis, University of Saskatchewan, Saskatoon, SK, Canada, 2006. [Google Scholar]
- Fu, Y.Q.; Luo, J.; Nguyen, N.T.; Walton, A.; Flewitt, A.J.; Zu, X.T.; Li, Y.; McHale, G.; Matthews, A.; Iborra, E.; et al. Advances in piezoelectric thin films for acoustic biosensors, acoustofluidics and lab-on-chip applications. Prog. Mater. Sci. 2017, 89, 31–91. [Google Scholar] [CrossRef]
- Fu, C.; Ke, Y.; Quan, A.; Li, C.; Fan, X.; Ou, J.; Luo, J. Investigation of Rayleigh wave and love wave modes in 112 0 zno film based multilayer structure. Surf. Coatings Technol. 2019, 363, 330–337. [Google Scholar] [CrossRef]
- Zhang, V.Y.; Lefebvre, J.E.; Bruneel, C.; Gryba, T. A unified formalism using effective surface permittivity to study acoustic waves in various anisotropic and piezoelectric multilayers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2001, 48, 1449–1461. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Liu, Z.; Kuang, K.; He, Y.; Xia, X.; Li, K.; Chen, K.; Tang, G. Analysis Method for the Influence of Parasitic Surface Conductivity on Silicon-Based Surface Acoustic Wave Devices. IEEE Trans. Electron Devices 2024, 71, 3478–3482. [Google Scholar] [CrossRef]
- KAWALEC, A.; KOMORNICZAK, W. A Simplified Analysis Of The Acoustic Waves Utilizing A Complex Effective Surface Permittivity. Mol. Quantum Acoust. 2005, 26, 159. [Google Scholar]
- Emami, M.; Eskandari-Ghadi, M. Lamb’s problem: A brief history. Math. Mech. Solids 2020, 25, 501–514. [Google Scholar] [CrossRef]
- Lamb, H. On waves in an elastic plate. Proc. R. Soc. Lond. Ser. A Contain. Pap. Math. Phys. Character 1917, 93, 114–128. [Google Scholar]
- Sun, Y.; Lu, X.; Chen, B. The method of fundamental solutions for the high frequency acoustic-elastic problem and its relationship to a pure acoustic problem. Eng. Anal. Bound. Elem. 2023, 156, 299–310. [Google Scholar] [CrossRef]
- Rezk, A.R.; Tan, J.K.; Yeo, L.Y. HYbriD resonant acoustics (HYDRA). Adv. Mater. 2016, 28, 1970–1975. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, H.; Liu, W.; Hu, K.; Sun, S.; Yang, Z.; Wang, B. Grooving and Absorption on Substrates to Reduce the Bulk Acoustic Wave for Surface Acoustic Wave Micro-Force Sensors. Micromachines 2024, 15, 637. [Google Scholar] [CrossRef] [PubMed]
- Kent, C.K.; Ramakrishnan, N.; Kesuma, H.P. Advancements in One-Port Surface Acoustic Wave (SAW) Resonators for Sensing Applications: A Review. IEEE Sens. J. 2024, 24, 17337–17352. [Google Scholar] [CrossRef]
- Mei, J.; Friend, J. A review: Controlling the propagation of surface acoustic waves via waveguides for potential use in acoustofluidics. Mech. Eng. Rev. 2020, 7, 19–00402. [Google Scholar] [CrossRef]
- Wong, K.S.; Lee, L.; Hung, Y.M.; Yeo, L.Y.; Tan, M.K. Lamb to Rayleigh wave conversion on superstrates as a means to facilitate disposable acoustomicrofluidic applications. Anal. Chem. 2019, 91, 12358–12368. [Google Scholar] [CrossRef]
- Fu, C.; Yang, Q.; Ke, Y.; Tao, R.; Luo, J.; Fan, X.; Zhang, B.; Li, H. Development of lamb wave-based unidirectional transducers toward highly efficient microfluidic applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2022, 69, 1549–1555. [Google Scholar] [CrossRef]
- Wang, L.; Rokhlin, S. A compliance/stiffness matrix formulation of general Green’s function and effective permittivity for piezoelectric multilayers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2004, 51, 453–463. [Google Scholar] [CrossRef]
- Hays, R.M.; Hartmann, C.S. Surface-acoustic-wave devices for communications. Proc. IEEE 1976, 64, 652–671. [Google Scholar] [CrossRef]
- Zhang, Z.D.; Yu, S.Y.; Xu, H.; Lu, M.H.; Chen, Y.F. Monolithic Strong Coupling of Topological Surface Acoustic Wave Resonators on Lithium Niobate. Adv. Mater. 2024, 36, 2312861. [Google Scholar] [CrossRef] [PubMed]
- Roshchupkin, D.; Ortega, L.; Zizak, I.; Plotitcyna, O.; Matveev, V.; Kononenko, O.; Emelin, E.; Erko, A.; Tynyshtykbayev, K.; Irzhak, D.; et al. Surface acoustic wave propagation in graphene film. J. Appl. Phys. 2015, 118, 104901. [Google Scholar] [CrossRef]
- Roshchupkin, D.; Emelin, E.; Plotitcina, O.; Mololkin, A.; Telminov, O. Scanning Electron Microscopy Investigation of Surface Acoustic Wave Propagation in a 41° YX-Cut of a LiNbO3 Crystal/Si Layered Structure. Crystals 2021, 11, 1082. [Google Scholar] [CrossRef]
- Smagin, N.; Djoumi, L.; Herth, E.; Vanotti, M.; Fall, D.; Blondeau-Patissier, V.; Duquennoy, M.; Ouaftouh, M. Fast time-domain laser Doppler vibrometry characterization of surface acoustic waves devices. Sens. Actuators Phys. 2017, 264, 96–106. [Google Scholar] [CrossRef]
- Gai, C.; Hu, H.; Han, J.; Lei, Y.; Ning, J.; Ye, D. Combination of pulse signal modulation and hydrophilic treatment of a substrate for controlling the thermal distribution in surface acoustic wave atomization. Appl. Therm. Eng. 2023, 228, 120377. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electrode Width (m) | Electrode Height (nm) | Plate Thickness (m) | |
|---|---|---|---|
| Periodic Structural Parameters | * 24:1:175 | 150 | 350 |
| , | |||
| Mechanical Boundary Conditions Electrical Boundary Conditions | Periodicity Periodicity | Free Free or metalized | Free Free |
| Terms | Values |
|---|---|
| IDT pairs | 30 |
| IDT aperture | 3 mm |
| Thickness | 350 μm |
| Wavelength | 132, 280, 320, 352, and 468 μm |
| 2.65, 1.25, 1.09, 0.99, and 0.75 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gai, C.; Ma, Q.; Ning, J.; Ding, Y.; Lei, Y.; Li, H.; Guo, C.; Hu, H. Development of Highly Efficient Lamb Wave Transducers toward Dual-Surface Simultaneous Atomization. Sensors 2024, 24, 5607. https://doi.org/10.3390/s24175607
Gai C, Ma Q, Ning J, Ding Y, Lei Y, Li H, Guo C, Hu H. Development of Highly Efficient Lamb Wave Transducers toward Dual-Surface Simultaneous Atomization. Sensors. 2024; 24(17):5607. https://doi.org/10.3390/s24175607
Chicago/Turabian StyleGai, Chenhui, Qinghe Ma, Jia Ning, Yizhan Ding, Yulin Lei, Honggeng Li, Chunhua Guo, and Hong Hu. 2024. "Development of Highly Efficient Lamb Wave Transducers toward Dual-Surface Simultaneous Atomization" Sensors 24, no. 17: 5607. https://doi.org/10.3390/s24175607
APA StyleGai, C., Ma, Q., Ning, J., Ding, Y., Lei, Y., Li, H., Guo, C., & Hu, H. (2024). Development of Highly Efficient Lamb Wave Transducers toward Dual-Surface Simultaneous Atomization. Sensors, 24(17), 5607. https://doi.org/10.3390/s24175607