

A Cooperative Optimization Model for Variable Approach Lanes at Signaled Intersections Based on Real-Time Flow
Abstract
:1. Introduction
- A functional shift setting of the VALs in signalized intersections is constructed. Based on the real-time traffic flow at the intersection, a corresponding VAL threshold recognition scheme can be generated in real time, and corresponding flow discrimination can be performed to transform the VAL function.
- Cooperative control optimization of the signal control scheme based on setting VALs is proposed to maximize the intersection traffic benefits. A multi-objective optimization model of intersection VAL signal timing with the objectives of minimizing the average vehicle delay, minimizing the queue length, and maximizing the capacity is established.
2. Related Works
2.1. Switching the Function of VALs
2.2. Cooperative Optimization of Spatial and Temporal Resources
3. Model Assumption
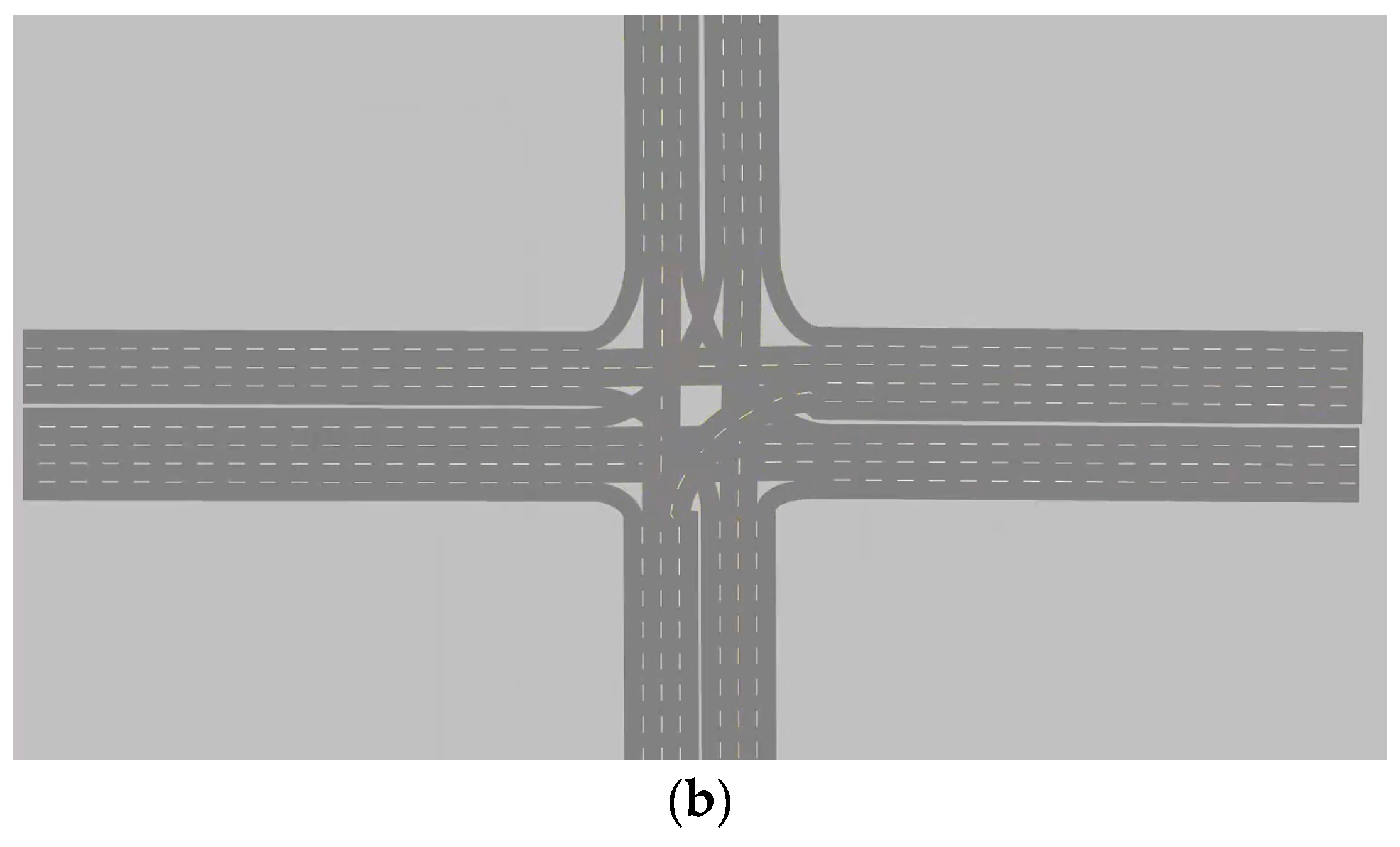
3.1. Research Scenario
3.2. Research Hypothesis
- (1)
- The intersection traffic flow has time and directional imbalance characteristics, which need to be solved with the application of variable guidance lanes.
- (2)
- There is at least one left-turn lane and one straight lane at the intersection approach, and the number of lanes with variable approach lanes in the approach is at least 3, which is a typical application scenario for setting variable guidance lanes.
- (3)
- Intersection signal timing is set to the standard four phases, with left turn and straight phases. Right-turn vehicles are not controlled by signal constraints under Chinese traffic law; therefore, right-turn vehicles are not considered in this paper.
4. Parameter Selection and Analysis
4.1. Signal Optimization Parameter Selection
4.1.1. Variable Approach Lane Intersection Delays
4.1.2. Capacity
4.1.3. Queue Length
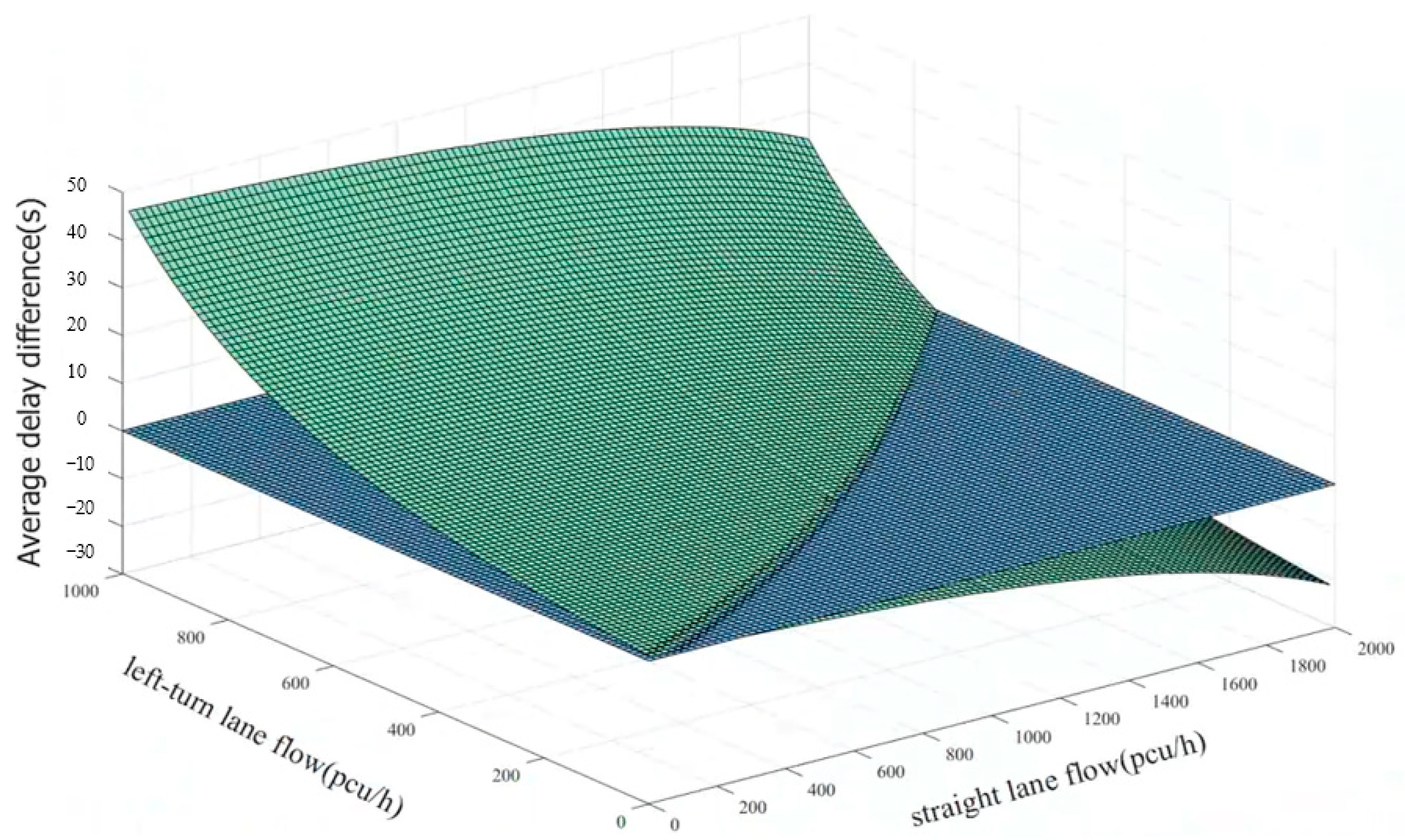
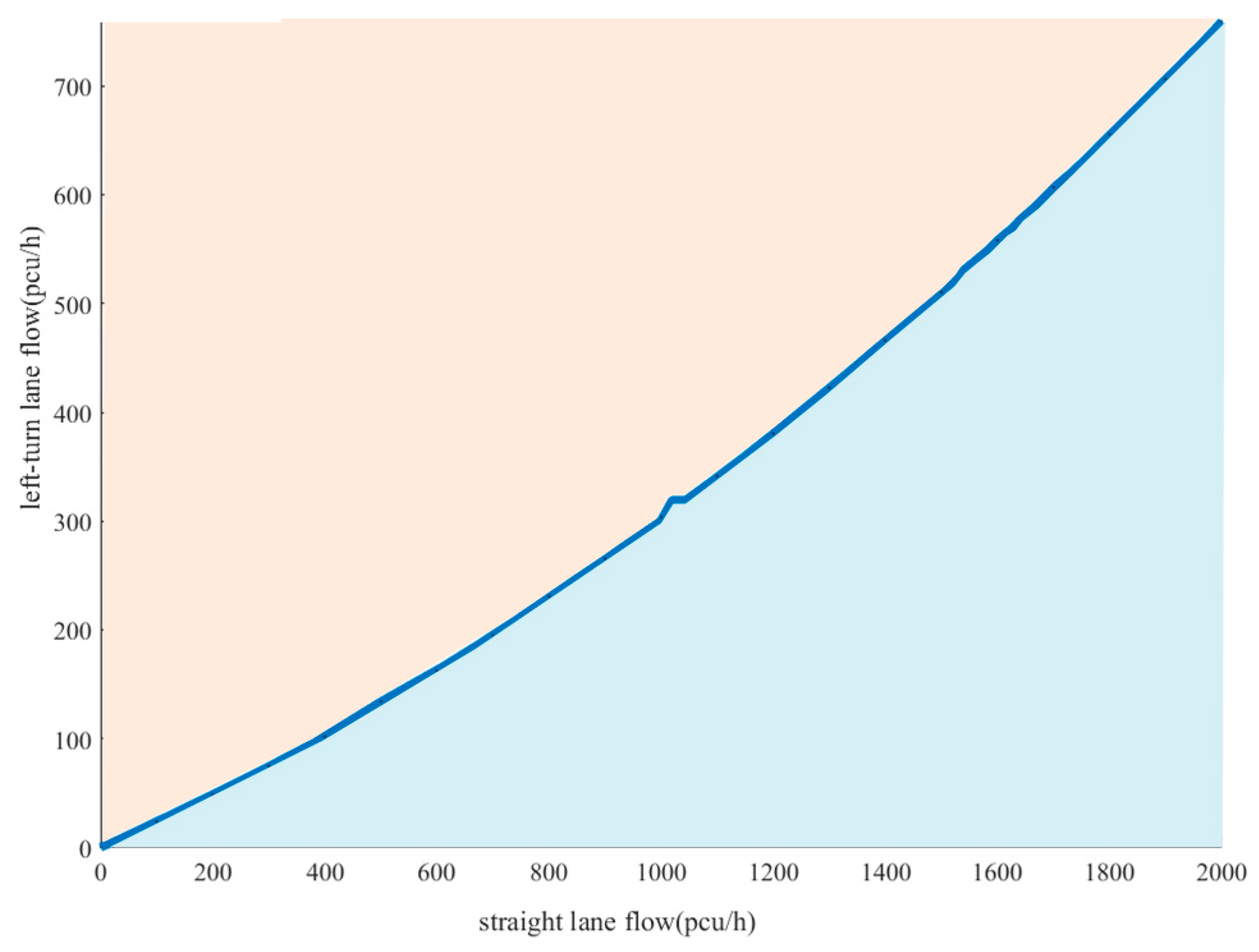
4.2. Average Vehicle Delay Differential Solving and Analysis
- (1)
- Both straight and left-turn traffic are not saturated, and no congestion occurs, so the variable approach lane function does not need to be changed.
- (2)
- Both straight and left-turn traffic are oversaturated, at which point both the straight and left-turn lanes of the approach will generate queues of vehicles, and the intersection timing design should be readjusted.
- (3)
- Oversaturation in one direction of both straight and left-turn traffic. When the detection of the intersection approach traffic in one direction is much larger than the traffic flow in the other direction, the lane function of the direction of the smaller traffic flow should be transformed into the direction of traffic overflow to balance the traffic flow in both directions and the road space resources.
5. Model Establishment
5.1. Signal Timing Optimization Model
- (1)
- Green time constraints
- (2)
- Cycle length constraints
- (3)
- Saturation degree constraint
5.2. Model Optimization Results
6. Simulation Validation
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Harvey, A.; Bullock, D. Implementation of a distributed control system for dynamic lane assignment. In Proceedings of the 28th Southeastern Symposium on System Theory, Baton Rouge, LA, USA, 31 March–2 April 1996; pp. 524–528. [Google Scholar]
- Hoose, H.J. Planning Effective Reversible Lane Control. TIE J. 2005, 25, 408–413. [Google Scholar]
- Wolshon, B.; Lambert, L. Reversible Lane systems: Synthesis of practice. J. Transp. Eng. 2006, 132, 933–944. [Google Scholar] [CrossRef]
- Zhao, F.; Fu, L.; Pan, X.; Zhong, M.; Kwon, T.J. An interactive traffic signal optimization approach with dynamic variable guidance lane control. J. Adv. Transp. 2022, 2022, 5880198. [Google Scholar] [CrossRef]
- Gong, X.; Kang, S. Study and application of traffic direction changing algorithm for urban tide traffic situation. J. Transp. Syst. Eng. Inf. Technol. 2006, 6, 33–40. [Google Scholar]
- Assi, K.J.; Nedal, T.R. Proposed quick method for applying dynamic lane assignment at signalized intersections. IATSS Res. 2018, 42, 1–7. [Google Scholar] [CrossRef]
- Pérez-Méndez, D.; Gershenson, C.; Lárraga, M.E.; Mateos, J.L. Modeling adaptive reversible lanes: A cellular automata approach. PLoS ONE 2021, 16, e0244326. [Google Scholar] [CrossRef] [PubMed]
- Jiao, F.T. A Dynamic Control Method for Reverse Variable Lane Based on Multi-Source Data. Master’s Thesis, Shandong University of Technology, Zibo, China, 2018. [Google Scholar]
- Afandizadeh, S.; Jahangiri, A.; Kalantari, N. Identifying the optimal configuration of one-way and two-way streets for contraflow operation during an emergency evacuation. Nat. Hazards 2012, 69, 1315–1334. [Google Scholar] [CrossRef]
- Nassiri, H.; Edrissi, A.; Alibabai, H. Estimation of the logit model for the online contraflow problem. Transport 2010, 25, 433–441. [Google Scholar] [CrossRef]
- Xie, C.; Mark, A.T. Lane-based evacuation network optimization: An integrated lagrangian relaxation and tabu search approach. Transp. Res. Part C Emerg. Technol. 2011, 19, 40–63. [Google Scholar] [CrossRef]
- Hausknecht, M.; Au, T.C.; Stone, P.; Fajardo, D.; Waller, T. Dynamic Lane reversal in traffic management. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1929–1934. [Google Scholar]
- Wang, X.; Wang, Y.L.; Zhang, M.C. Empirical study on Reversible Lane in Beijing. In Proceedings of the International Conference on Computer Information Systems and Industrial Applications, Bangkok, Thailand, 28–29 June 2015; pp. 444–447. [Google Scholar]
- Liu, C.; Yang, H.; Ke, R.; Wang, Y. Toward a Dynamic Reversible Lane Management Strategy by Empowering Learning-Based Predictive Assignment Scheme. IEEE Trans. Intell. Transp. Syst. 2022, 23, 23311–23323. [Google Scholar] [CrossRef]
- Malekzadeh, M.; Papamichail, I.; Papageorgiou, M.; Bogenberger, K. Optimal internal boundary control of lane-free automated vehicle traffic. Transp. Res. Part C Emerg. Technol. 2021, 126, 103060. [Google Scholar] [CrossRef]
- Jin, X.; Yu, X.; Hu, Y.; Wang, Y.; Papageorgiou, M.; Papamichail, I.; Malekzadeh, M.; Guo, J. Integrated control of internal boundary and ramp inflows for lane-free traffic of automated vehicles on freeways. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 1234–1239. [Google Scholar]
- Malekzadeh, M.; Troullinos, D.; Papamichail, I.; Papageorgiou, M.; Bogenberger, K. Internal boundary control in lane-free automated vehicle traffic: Comparison of approaches via microscopic simulation. Transp. Res. Part C Emerg. Technol. 2024, 158, 104456. [Google Scholar] [CrossRef]
- Xie, X.; Dong, L.; Gu, H.; Li, H.; Zhang, L. A collaborative method on reversible lane clearance and signal coordination control in associated intersection. J. Adv. Transp. 2023, 2023, 6599484. [Google Scholar] [CrossRef]
- Zhou, H.; Ding, J.; Qin, X. Optimization of variable approach lane use at isolated signalized intersections. Transp. Res. Rec. J. Transp. Res. Board 2016, 2556, 65–74. [Google Scholar] [CrossRef]
- Liu, W.; Xie, Z.; Chen, K. Optimization of Reversing Variable Lane Signal Timing Design Based on NSGA-Ⅱ Algorithm. J. Chongqing Jiaotong Univ. (Nat. Sci.) 2018, 37, 92–97. [Google Scholar]
- He, S.L.; Wang, W.; Zhang, J.; Yang, J. An improved optimization method for isolated signalized intersection based on the temporal and Spatial Resources Integration. Procedia—Soc. Behav. Sci. 2013, 96, 1696–1706. [Google Scholar] [CrossRef]
- Cui, S.; Xue, Y.; Gao, K.; Wang, K.; Yu, B.; Qu, X. Delay-throughput tradeoffs for signalized networks with finite queue capacity. Transp. Res. Part B Methodol. 2024, 180, 102876. [Google Scholar] [CrossRef]
- Lu, T.; Yang, Z.; Ma, D.; Jin, S. Bi-level Programming Model for Dynamic Reversible Lane Assignment. IEEE Access 2018, 6, 71592–71601. [Google Scholar] [CrossRef]
- Hong, W.; Yang, Z.; Sun, X.; Wang, J.; Jiao, P. Temporary Reversible Lane Design Based on Bi-Level Programming Model during the Winter Olympic Games. Sustainability 2022, 14, 4780. [Google Scholar] [CrossRef]
- Wong, C.K.; Heydecker, B.G. Optimal allocation of turns to lanes at an isolated signal-controlled junction. Transp. Res. Part B Methodol. 2011, 45, 667–681. [Google Scholar] [CrossRef]
- Zhuo, J.; Zhu, F. Evaluation of platooning configurations for connected and automated vehicles at an isolated roundabout in a mixed traffic environment. J. Intell. Connect. Veh. 2023, 6, 136–148. [Google Scholar] [CrossRef]
- Xuan, Y.; Daganzo, C.F.; Cassidy, M.J. Increasing the capacity of signalized intersections with separate left turn phases. Transp. Res. Part B Methodol. 2011, 45, 769–781. [Google Scholar] [CrossRef]
- Fu, L.J.; Guo, H.F.; Dong, H.Z. Variable Lane adaptive control method based on dynamic traffic flow. Sci. Technol. Bull. 2011, 27, 899–903. [Google Scholar]
- Zhao, J.; Ma, W.; Zhang, H.M.; Yang, X. Increasing the capacity of signalized intersections with dynamic use of exit lanes for left-turn traffic. Transp. Res. Rec. J. Transp. Res. Board 2013, 2355, 49–59. [Google Scholar] [CrossRef]
- Yuan, Q.; Shi, H.; Xuan, A.T.; Gao, M.; Xu, Q.; Wang, J. Enhanced target tracking algorithm for autonomous driving based on visible and infrared image fusion. J. Intell. Connect. Veh. 2023, 6, 237–249. [Google Scholar] [CrossRef]
- Xue, Y.; Wang, C.; Ding, C.; Yu, B.; Cui, S. Observer-based event-triggered adaptive platooning control for autonomous vehicles with motion uncertainties. Transp. Res. Part C Emerg. Technol. 2024, 159, 104462. [Google Scholar] [CrossRef]
- Tian, Y.Q.; Shang, Z.H. Research on the variable lane setting of the exit road at urban road intersections. Urban Transp. 2013, 12, 74–80. [Google Scholar]
- Zhao, J.; Zhao, X.Z. The optimal lane function and signal conversion method of variable lanes at intersections. J. Univ. Shanghai Sci. Technol. 2016, 38, 380–386. [Google Scholar]
- Qu, D.Y.; Cao, J.Y.; Wang, P.; Li, J.; Xu, X. Green wave control method for coordinated optimization of tidal lanes and changing lanes. J. Jinan Univ. 2017, 31, 208–214. [Google Scholar]
- Chen, Y.Y.; Han, W. Multi-objective signal timing optimization method for reverse variable lane intersections. In Proceedings of the CICTP 2022, Changsha, China, 8–11 July 2022; pp. 469–480. [Google Scholar]
- He, J.; Zhu, Y.; Zhang, J.; Ma, X. Reversible Lane control system with low emission load based on VISSIM simulator. In Proceedings of the 2021 IEEE 2nd International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE), Nanchang, China, 26–28 March 2021; pp. 911–914. [Google Scholar]
- Ren, Q.L.; Tan, L.P. Signal Timing Optimization Method for Reverse Variable Lane Intersection. J. Transp. Syst. Eng. Inf. Technol. 2020, 20, 63–70. [Google Scholar]
- Yang, J.D.; Yang, D.Y. Optimization model of signal cycle time of urban signal control intersection. J. Tongji Univ. Nat. Sci. Ed. 2001, 29, 789–794. [Google Scholar]
- Yin, H.B.; Xu, J.-m. Road Traffic Control Technology; South China University of Technology Press: Guangzhou, China, 2000. [Google Scholar]
- Wu, B.; Li, Y. Traffic Management and Control; People’s Traffic Press: Beijing, China, 2015. [Google Scholar]
- Sha, Z.; OpenITS Org. OpenData 6.1-Introduction of HuangKe Intersection Data in Hefei Demonstration Area. 2021. Available online: http://www.openits.cn/openData2/710.jhtml (accessed on 19 November 2021).
- Chen, K.M.; Yan, B.J. Road Capacity Analysis; People’s Transportation Press: Beijing, China, 2003. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase No. | Phase Status | Green Time [s] | Amber Time [s] | Total Cycle Length [s] |
|---|---|---|---|---|
| 1 | Straight East–West | 33 | 3 | 106 |
| 2 | Turn Left East–West | 21 | 3 | |
| 3 | Straight North–South | 24 | 3 | |
| 4 | Turn Left North–South | 16 | 3 |
| Lane Direction | ] | Left Turn Flow Ratio | |
|---|---|---|---|
| Straight | Turn Left | ||
| 300 | 74.8 | 0.20 | |
| 400 | 101.9 | 0.20 | |
| 500 | 134.4 | 0.21 | |
| 600 | 162.5 | 0.21 | |
| 700 | 195.0 | 0.22 | |
| 800 | 230.8 | 0.22 | |
| 900 | 265.5 | 0.23 | |
| 1000 | 303.4 | 0.23 | |
| 1100 | 341.3 | 0.24 | |
| 1200 | 380.3 | 0.24 | |
| 1300 | 422.6 | 0.25 | |
| 1400 | 465.9 | 0.25 | |
| 1500 | 510.4 | 0.25 | |
| 1600 | 558.1 | 0.26 | |
| 1700 | 606.8 | 0.26 | |
| 1800 | 655.6 | 0.27 | |
| 1900 | 706.5 | 0.27 | |
| 2000 | 759.6 | 0.28 | |
| The Direction of Approach | Lane Function | Lane Number | Flow [pcu/h] |
|---|---|---|---|
| East | Straight | 2 | 1010 |
| Turn Left | 2 | 430 | |
| West | Straight | 3 | 1000 |
| Turn Left | 1 | 245 | |
| South | Straight | 2 | 680 |
| Turn Left | 1 | 205 | |
| North | Straight | 2 | 560 |
| Turn Left | 1 | 190 |
| Phase | Approach | Lane Function | Flow [] | Saturation Flow [] | Number of Lanes | Flow Ratio | Critical Flow Ratio | Total Flow Ratio |
|---|---|---|---|---|---|---|---|---|
| 1 | East | Straight | 1010 | 1650 | 2 | 0.31 | 0.31 | 0.81 |
| West | Straight | 1000 | 3 | 0.20 | ||||
| 2 | East | Left | 430 | 1550 | 2 | 0.14 | 0.16 | |
| West | Left | 245 | 1 | 0.16 | ||||
| 3 | South | Straight | 680 | 1650 | 2 | 0.21 | 0.21 | |
| North | Straight | 560 | 2 | 0.17 | ||||
| 4 | South | Left | 205 | 1550 | 1 | 0.13 | 0.13 | |
| North | Left | 190 | 1 | 0.12 |
| Approach Direction/Function | Original Scheme | Webster Scheme | The Scheme of This Paper | |||
|---|---|---|---|---|---|---|
| Travel Time/s | Travel Time/s | Travel Time/s | ||||
| East/ Straight | 160 | 39.34 | 155 | 37.61 | 160 | 29.04 |
| East/ Turn Left | 35 | 49.94 | 35 | 50.69 | 34 | 38.4 |
| West/ Straight | 176 | 42.26 | 174 | 31.58 | 179 | 34.86 |
| West/ Turn Left | 64 | 62.39 | 74 | 44.96 | 70 | 42.99 |
| South/ Straight | 99 | 29.48 | 96 | 30.21 | 103 | 30.46 |
| South/ Turn Left | 31 | 40.96 | 30 | 39.19 | 31 | 39.49 |
| North/ Straight | 74 | 37.53 | 73 | 37.8 | 77 | 29.46 |
| North/ Turn Left | 19 | 50.55 | 19 | 46.29 | 19 | 41.96 |
| Total | 658 | 352.45 | 656 | 318.33 | 673 | 286.66 |
| Original Scheme | Webster Scheme | The Scheme of This Paper | |
|---|---|---|---|
| ] | 34.2 | 29.9 | 25.9 |
| ] | 25.9 | 25.2 | 21.1 |
| Total Queue Length [m] | 121.7 | 124.6 | 105.2 |
| Maximum Queue Length [m] | 110.7 | 112.7 | 99.4 |
| Approach Lanes | Original Scheme | Webster Scheme | The Scheme of This Paper |
|---|---|---|---|
| ES | C | C | B |
| EL | D | D | C |
| WS | C | B | C |
| WL | D | C | C |
| SS | C | C | C |
| SL | C | C | C |
| NS | C | C | B |
| NL | D | D | C |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Z.; Zhu, M.; Liu, M.; Li, P.; Tang, R.; Zhang, X. A Cooperative Optimization Model for Variable Approach Lanes at Signaled Intersections Based on Real-Time Flow. Sensors 2024, 24, 5701. https://doi.org/10.3390/s24175701
Zhu Z, Zhu M, Liu M, Li P, Tang R, Zhang X. A Cooperative Optimization Model for Variable Approach Lanes at Signaled Intersections Based on Real-Time Flow. Sensors. 2024; 24(17):5701. https://doi.org/10.3390/s24175701
Chicago/Turabian StyleZhu, Zhiqiang, Mingyue Zhu, Miaomiao Liu, Pengrui Li, Renjing Tang, and Xuechi Zhang. 2024. "A Cooperative Optimization Model for Variable Approach Lanes at Signaled Intersections Based on Real-Time Flow" Sensors 24, no. 17: 5701. https://doi.org/10.3390/s24175701