Advances and Challenges in the Hunting Instability Diagnosis of High-Speed Trains


Abstract
:1. Introduction
2. Evaluation Criteria for Vehicle Hunting Instability
2.1. Evaluation Methods Based on Wheel-Rail Guiding Forces and Axle-Box Lateral Forces
2.2. Evaluation Methods Based on Bogie Frame Acceleration and Carbody Acceleration
3. Early Detection of Hunting Instability
3.1. Diagnostic Signal Sources
3.2. Diagnostic Features
- (1)
- Assume original signal is m(t), and add a set of Gaussian white noise v(t) to it.
- (2)
- Perform traditional EMD decomposition on the signal to obtain the IMF components bi, where q is the residual term and n is the number of decomposed IMF components.
- (3)
- Each time, add different white noise sequences vi(t), with the same amplitude, and repeat the previous two steps.
- (4)
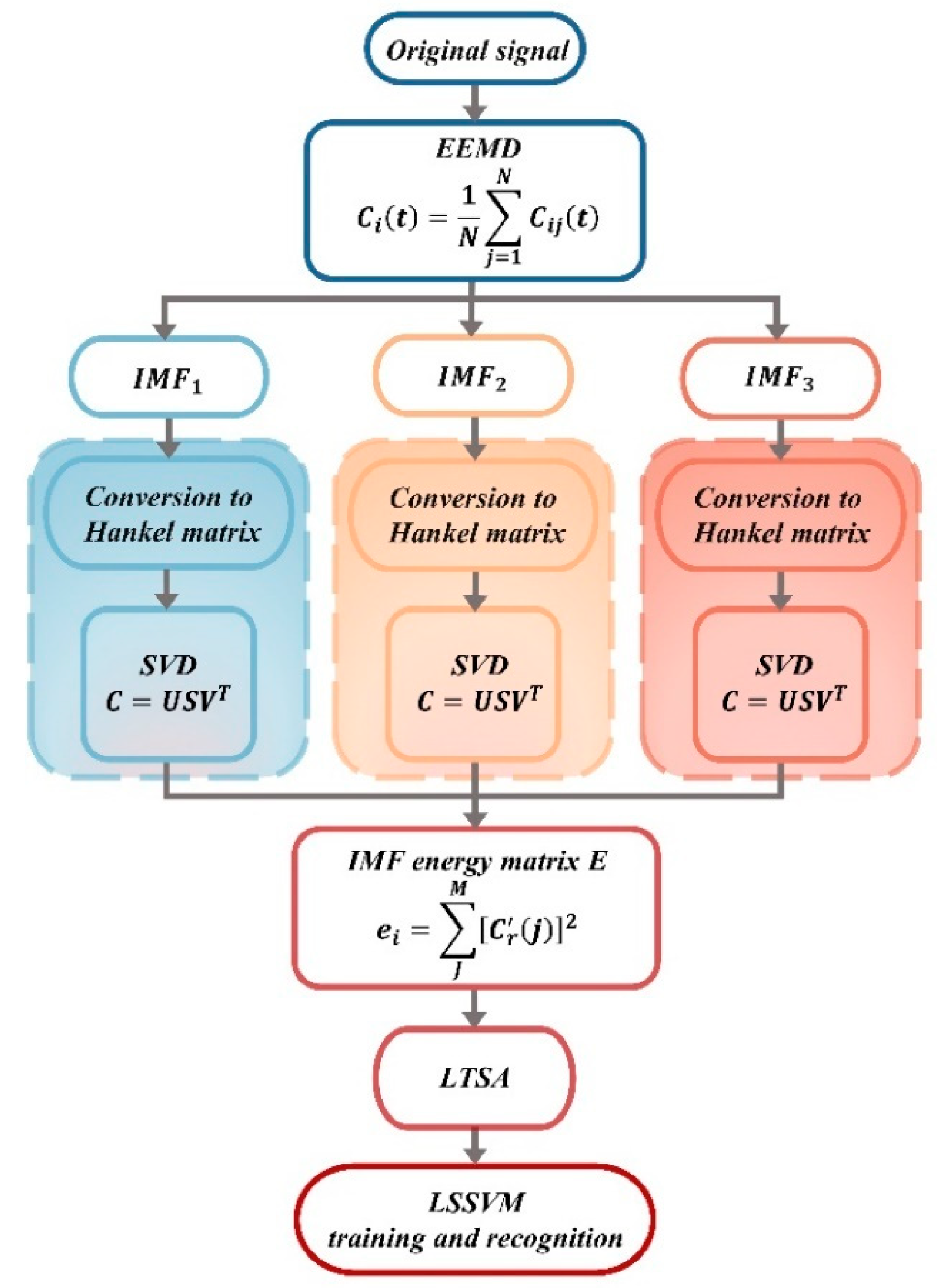
- By repeating the EMD process multiple times and averaging the results, the impact of white noise can be eliminated. The IMF components corresponding to the original signal can then be expressed as follows:where N represents the number of times white noise is added.
3.3. Diagnostic Targets
4. Evaluation and Fault Tracing of Hunting Instability
4.1. Fine-Grained Evaluation
4.2. Fault Localization
5. Mechanisms of Hunting Instability
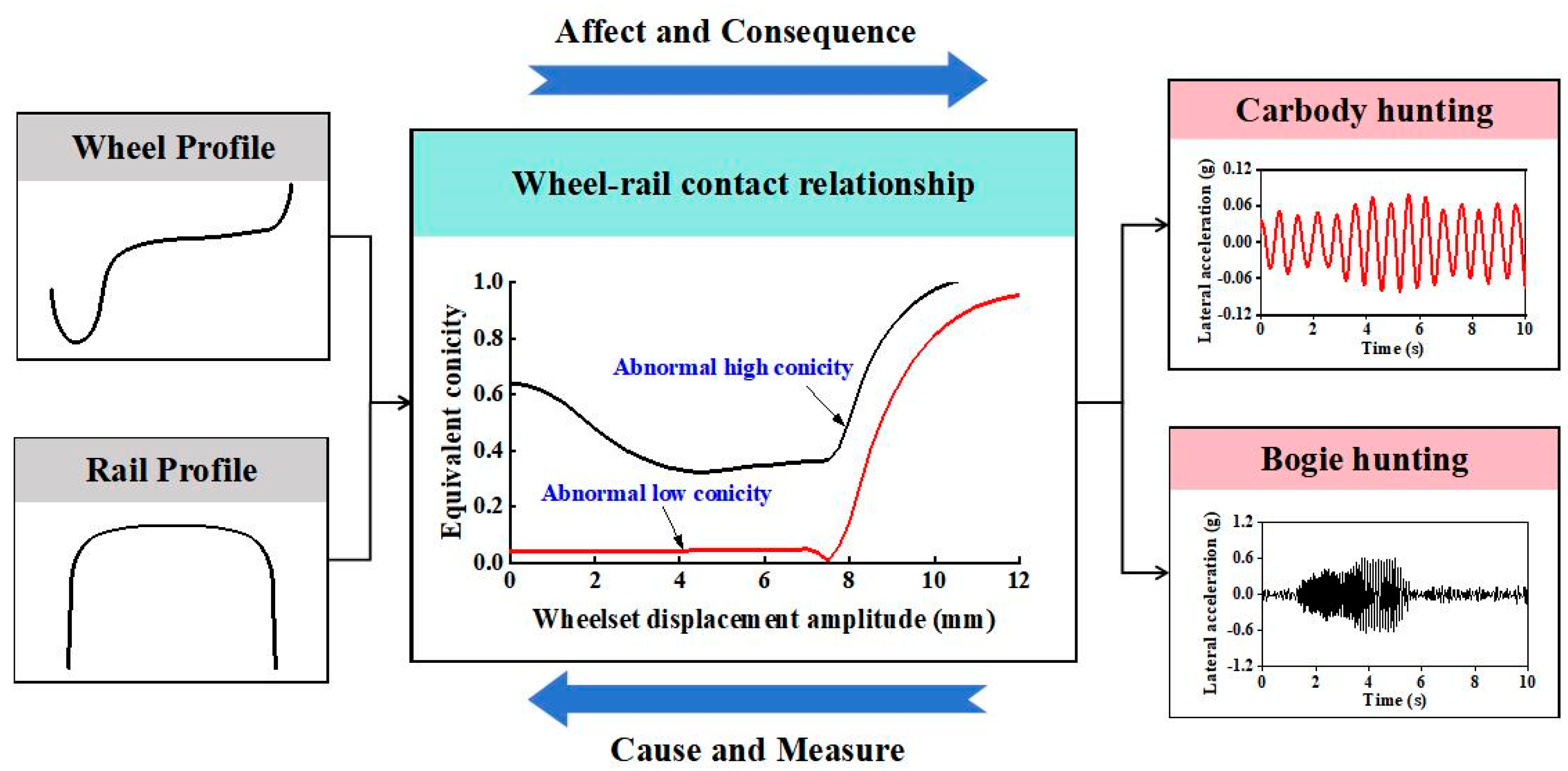
5.1. Influencing Factors in Regard to Hunting Stability
5.2. Dynamic Degradation Mechanisms of Hunting Instability
5.3. Common Features of Bogie and Carbody Hunting Instabilities
6. Challenges and Recommendations
6.1. Faced Challenges
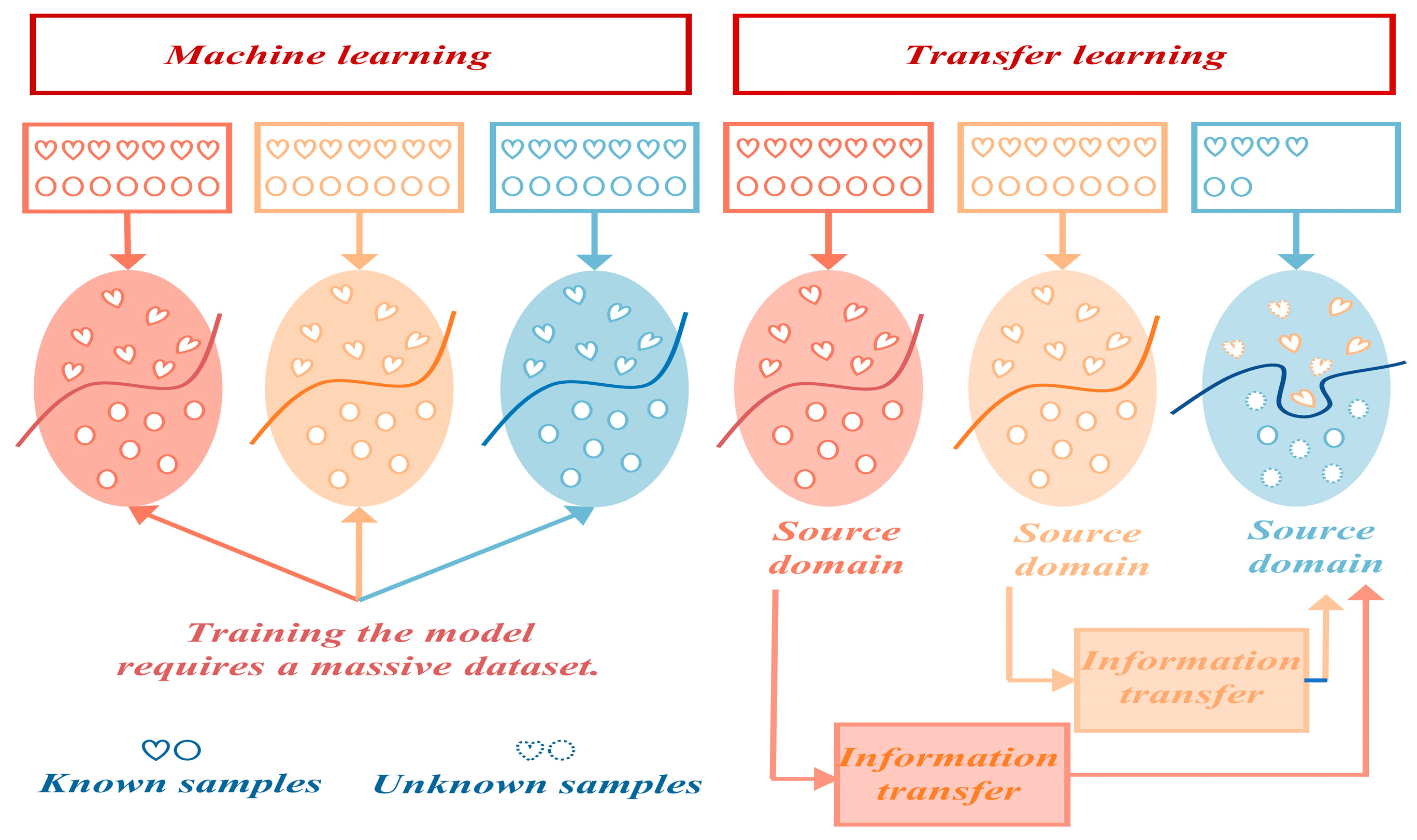
6.2. Prospects for Migration-Assisted Hunting Instability Diagnosis
7. Conclusions
- (1)
- Explaining the development process of China’s high-speed trains. As train operating speeds continue to rise and external factors evolve, there is an urgent need to address issues related to instability warnings, operational performance enhancement, and maintenance costs. These challenges highlight the pressing demand for improvements in both operational performance and the reform of maintenance systems for China’s EMUs.
- (2)
- Summarize the criteria used by researchers for assessing the warning standards of hunting instability in high-speed trains, including both bogie hunting and body hunting instability. It provides a theoretical foundation for the early warning and prevention of train hunting instability, thereby ensuring the safety and stability of EMUs during high-speed operation. However, current evaluation standards typically rely on single indicators (such as lateral acceleration) and fixed thresholds to determine hunting instability. This approach does not adequately account for variations in the train speed, track conditions, load scenarios, or complex dynamics of high-speed trains, and it overlooks early-stage small-amplitude hunting. It is recommended to introduce multidimensional evaluation indicators and dynamically adjust the thresholds based on actual operating conditions to enhance the flexibility and adaptability of the standards.
- (3)
- The existing research on the diagnosis of early-stage minor hunting instability in high-speed trains is organized from three perspectives: diagnostic signal sources, diagnostic features, and diagnostic targets. Although early-stage small-amplitude hunting instability involves small vibration amplitudes, the repeated micro-vibrations can exacerbate wear between the track and wheels and impose continuous fatigue stress on critical components. If not accurately identified and effectively controlled, this condition may gradually evolve into more severe hunting instability, further increasing the risk to train operations and potentially leading to more serious safety incidents. Therefore, it is crucial to develop and implement more sensitive and high-precision onboard monitoring systems to capture key data during train operations in real time. By integrating signal analysis with machine learning techniques, engineers and operators can promptly identify and address hunting instability issues at their early stages.
- (4)
- To achieve the research goal of developing a comprehensive description system for hunting motion and precise fault identification, this study organizes and reviews the relevant research on the refined evaluation of bogie hunting instability and body hunting instability, as well as effective fault source tracing in these areas. Research in this area is currently limited and lacks depth. This is primarily because understanding the fault mechanism is fundamental to fault diagnosis, and the effectiveness of diagnostic methods ultimately hinges on the thoroughness of fault mechanism research. Existing studies mostly focus on diagnostics based on signal data, often neglecting the underlying mechanisms and characteristics of the fault itself, and consequently fail to establish a comprehensive fault assessment system and tracing mechanism. Therefore, it is essential to develop more sophisticated and high-precision simulation models that incorporate fault mechanisms. These models should predict the likelihood of hunting instability under varying speeds, loads, and environmental conditions, thereby providing data support for design improvements and operational strategies.
- (5)
- Starting from the operational mechanisms of high-speed trains, it is crucial to conduct an in-depth study of the intrinsic evolution mechanisms of hunting instability. This involves organizing research from three perspectives: wheel-rail contact relationships, suspension systems, and external influencing factors. Such an approach is essential for developing effective preventive and intervention measures. In practical operations and development, to ensure optimal performance of trainsets and prevent hunting instability, engineers should focus on optimizing wheel-rail profiles and contact geometry, adjusting suspension system stiffness and damping parameters, and dynamically adjusting train speed and load distribution based on the real-time monitoring of track conditions and the train status. This approach helps to prevent triggering the critical conditions that lead to hunting instability.
Author Contributions
Funding
Conflicts of Interest
References
- Wei, Y. Preface: Current research progress on mechanics of high speed rail. Acta Mech. Sin. 2014, 30, 846–848. [Google Scholar] [CrossRef]
- Wang, C.; Luo, S.; Xu, Z.; Ma, W.; Dong, X.; Wu, P. Simulation Analysis and Field Test Verification of Lateral Instability of High-speed EMU Framework. J. China Railw. Soc. 2021, 43, 39–48. [Google Scholar]
- Dong, X.; Xu, Z.; Shi, F.; Zhu, S. The field test research for running stability of EMU in bogie alarm. Railw. Locomot. Car 2017, 37, 1–5+49. [Google Scholar]
- Shi, H.; Wang, J.; Wu, P.; Song, C.; Teng, W. Field measurements of the evolution of wheel wear and vehicle dynamics for high-speed trains. Veh. Syst. Dyn. 2018, 56, 1187–1206. [Google Scholar] [CrossRef]
- Wu, Y.; Zeng, J.; Qu, S.; Shi, H.; Wang, Q.; Wei, L. Low-Frequency Carbody Sway Modelling Based on Low Wheel-Rail Contact Conicity Analysis. Shock Vib. 2020, 2020, 6671049. [Google Scholar] [CrossRef]
- Wang, J.; Ling, L.; Ding, X.; Wang, K.; Zhai, W. The influence of aerodynamic loads on carbody low-frequency hunting of high-speed trains. Int. J. Struct. Stab. Dyn. 2022, 22, 2250145. [Google Scholar] [CrossRef]
- Li, Y.; Chi, M.; Guo, Z.; Liang, S. An abnormal carbody swaying of intercity EMU train caused by low wheel-rail equivalent conicity and damping force unloading of yaw damper. Railw. Eng. Sci. 2023, 31, 252–268. [Google Scholar] [CrossRef]
- Wei, L.; Zeng, J.; Chi, M.; Wang, J. Carbody elastic vibrations of high-speed vehicles caused by bogie hunting instability. Veh. Syst. Dyn. 2017, 55, 1321–1342. [Google Scholar] [CrossRef]
- Li, F.; Wang, J.; Shi, H.; Wu, P. Research on Causes and Countermeasures of Abnormal Flexible Vibration of Car Body for Electric Multiple Units. J. Mech. Eng. 2019, 55, 178–188. [Google Scholar] [CrossRef]
- Gong, D.; Liu, G.; Zhou, J. Research on mechanism and control methods of carbody chattering of an electric multiple-unit train. Multibody Syst. Dyn. 2021, 53, 135–172. [Google Scholar] [CrossRef]
- Chang, C.; Ding, X.; Ling, L.; Li, F.; Liu, T.; Wang, K.; Zhai, W. Mechanism of high-speed train carbody shaking due to degradation of wheel-rail contact geometry. Int. J. Rail Transp. 2023, 11, 289–316. [Google Scholar] [CrossRef]
- Wickens, A. The dynamic stability of railway vehicle wheelsets and bogies having profiled wheels. Int. J. Solids Struct. 1965, 1, 319–341. [Google Scholar] [CrossRef]
- Qu, S.; Wang, J.; Zhang, D.; Li, D.; Wei, L. Failure analysis on bogie frame with fatigue cracks caused by hunting instability. Eng. Fail. Anal. 2021, 128, 105584. [Google Scholar] [CrossRef]
- Sun, J.; Chi, M.; Jin, X.; Liang, S.; Wang, J.; Li, W. Experimental and numerical study on carbody hunting of electric locomotive induced by low wheel-rail contact conicity. Veh. Syst. Dyn. 2021, 59, 203–223. [Google Scholar] [CrossRef]
- Polach, O. Influence of wheel/rail contact geometry on the behaviour of a railway vehicle at stability limit. In Proceedings of the ENOC-2005, Eindhoven, The Netherlands, 7–12 August 2015; pp. 2203–2210. [Google Scholar]
- Sun, L.; Yao, J. Hunting Derailment Safety Evaluation Method of High Speed Railway Vehicle. China Railw. Sci. 2013, 34, 82–92. [Google Scholar]
- Dong, X.; Wang, Y.; Wang, L.; Liu, H.; Song, G. Research on the Reprofiling Strategy for the Wheel Tread of High-Speed EMU. China Railw. Sci. 2013, 34, 88–94. [Google Scholar]
- Wen, X. Research of 68C9 Fault for CRH3C EMU Running in Beijing—Tianjin Intercity Railway. Railw. Locomot. Car 2015, 35, 109–114. [Google Scholar]
- Wang, J.; Song, C.; Wu, P.; Dai, H. Wheel reprofiling interval optimization based on dynamic behavior evolution for high speed trains. Wear 2016, 366, 316–324. [Google Scholar] [CrossRef]
- Shi, H.; Luo, R.; Zeng, J. Review on domestic and foreign dynamics evaluation criteria of high-speed train. J. Traffic Transp. Eng. 2021, 21, 36–58. [Google Scholar] [CrossRef]
- EN 14363:2016; Railway Applications-Testing for the Acceptance of Running Characteristics of Railway Vehicles-Testing of Running Behaviour and Stationary Tests. Czech Institute for Normalisation: Prague, Czech Republic, 2005.
- UIC 518-2005; Testing and Approval of Railway Vehicle from the Point of Views of their Dynamic Bchavior-Safety-Track Fatigue-Ride Quality. UIC: Paris, France, 2005.
- 49CFR 213; Transportation, Part 213-Track Safety Standard. FRA Regulations: Washington, DC, USA, 2003.
- UIC 515-1; Passenger Rolling Stock-Trailer Bogies-Running Gear-General Provisions Applicable, 2nd ed. UIC: Paris, France, 2003.
- 2008/217/EC; Technical specification for interoperability relating to the ‘rolling stock’ sub-system of the trans-European high-speed rail system. European Community: Maastricht, The Netherlands, 2008.
- GB 5599-2019; Specifications for the Assessment and Testing of the Dynamic Performance of Railway Vehicles. China Standards Press: Beijing, China, 2019.
- Sun, J.; Meli, E.; Cai, W.; Gao, H.; Chi, M.; Rindi, A.; Liang, S. A signal analysis based hunting instability detection methodology for high-speed railway vehicles. Veh. Syst. Dyn. 2021, 59, 1461–1483. [Google Scholar] [CrossRef]
- Ning, J.; Cui, W.; Chong, C.; Ouyang, H.; Chen, C.; Zhang, B. Feature recognition of small amplitude hunting signals based on the MPE-LTSA in high-speed trains. Measurement 2019, 131, 452–460. [Google Scholar] [CrossRef]
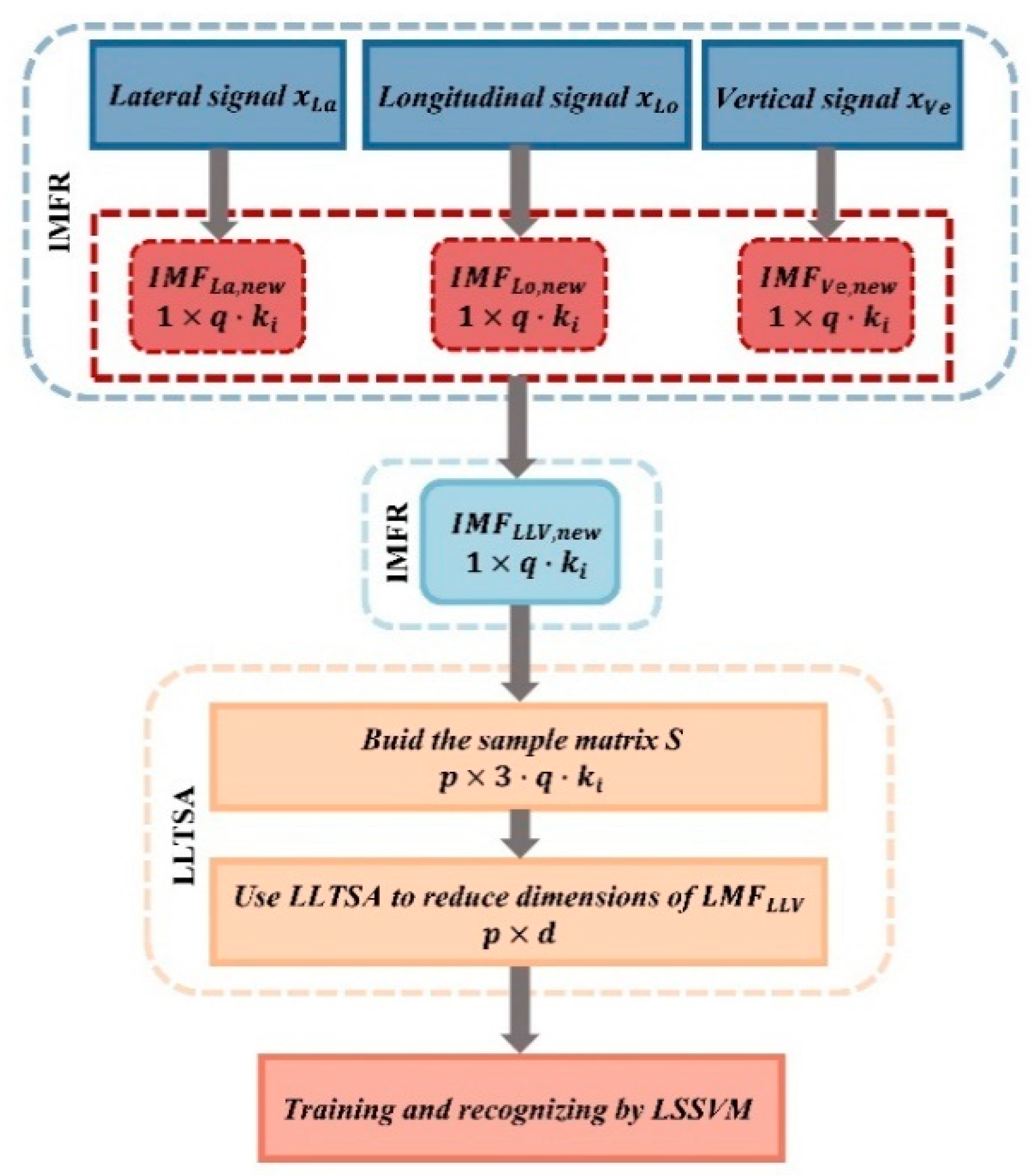
- Ye, Y.; Ning, J. Small-amplitude hunting diagnosis method for high-speed trains based on the bogie frame’s lateral-longitudinal-vertical data fusion, independent mode function reconstruction and linear local tangent space alignment. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2019, 233, 1050–1067. [Google Scholar] [CrossRef]
- Cai, L. A Real-Time Monitoring System of High Speed Train Bogie Hunting Instability Based on FPGA; Southwest Jiaotong University: Chengdu, China, 2012. [Google Scholar]
- Bruni, S.; Cheli, F.; Collina, A.; Resta, F. Road test data procedures for evaluating the hunting instability threshold of a railway vehicle from on board measurements. In The Dynamics of Vehicles on Roads and on Tracks; CRC Press: Boca Raton, FL, USA, 2021; pp. 168–179. [Google Scholar]
- Li, L.; Li, W.; Sun, X. Research on Instability detection technology of EMU based on ARM and FPGA architecture. Railw. Veh. 2022, 60, 53–56+100. [Google Scholar]
- Wang, X.; Ning, J.; Chen, C. Study on the recognition of lateral stability state of high-speed trains based on 1D CNN and LSTM. China Meas. Test 2020, 46, 25–30. [Google Scholar] [CrossRef]
- Ning, Y.; Ning, J.; Li, Y.; Chen, C. High-speed train small-amplitude hunting prediction method based on data imbalance. Electron. Meas. Technol. 2022, 45, 149–154. [Google Scholar] [CrossRef]
- Liu, Q.; Ning, J.; Ye, Y.; Chen, C. Study on the lateral instability fault recognition of high-speed train based on D-S evidence theory. China Meas. Test 2017, 43, 103–107. [Google Scholar]
- Ning, J.; Liu, Q.; Ouyang, H.; Chen, C.; Zhang, B. A multi-sensor fusion framework for detecting small amplitude hunting of high-speed trains. J. Vib. Control 2018, 24, 3797–3808. [Google Scholar] [CrossRef]
- Zheng, B.; Wei, L.; Zeng, J.; Zhang, D. Experimental and Numerical Investigation of Bogie Hunting Instability for Railway Vehicles Based on Multiple Sensors. Sensors 2024, 24, 4027. [Google Scholar] [CrossRef]
- Kulkarni, R.; Qazizadeh, A.; Berg, M.; Carlsson, U.; Stichel, S. Vehicle running instability detection algorithm (VRIDA): A signal based onboard diagnostic method for detecting hunting instability of rail vehicles. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2022, 236, 262–274. [Google Scholar] [CrossRef]
- Song, X. Research for Hunting Instability Detection of Bogie by Lateral Motion Identification Method; Southwest Jiaotong University: Chengdu, China, 2017. [Google Scholar]
- Yao, J.; Sun, L.; Hou, F. Study on evaluation methods for lateral stability of high-speed trains. Zhongguo Tiedao Kexue 2012, 33, 132–139. [Google Scholar]
- Guo, J.; Zhang, G.; Shi, H.; Zeng, J. Small-amplitude bogie hunting identification method for high-speed trains based on machine learning. Veh. Syst. Dyn. 2023, 62, 1253–1267. [Google Scholar] [CrossRef]
- Wang, M.; Ning, J.; Zhao, F.; Li, Y.; Chen, C. Hunting Classification Method Based on HHT Energy and Largest Lyapunov Exponent. Comput. Meas. Control 2023, 31. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, W.; Song, D. A new strategy for hunting alarm and stability evaluation for railway vehicles based on nonlinear dynamics analysis. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2020, 234, 54–64. [Google Scholar] [CrossRef]
- Ran, W.; Ning, J.; Chen, Y.; Chen, C. High-speed train small hunting evolution feature extraction based on EEMD-SVD-LTSA framework. Electron. Meas. Technol. 2019, 42, 1–5. [Google Scholar]
- Cui, W.; Ning, J.; Chong, C.; Li, Y.; Chen, C. Feature extraction of small hunting of high speed train based on EMD-ISOMAP. China Meas. Test 2016, 42. [Google Scholar] [CrossRef]
- Liu, X.; Ning, J.; Wang, Z.; Hong, Z.; Zhang, B.; Chen, C. High-speed train small-amplitude hunting recognition based on multi-source discrepancy adversarial network. J. Railw. Sci. Eng. 2024, 1–3. [Google Scholar] [CrossRef]
- Zhao, f.; Ning, J.; Fang, M.; Chen, c. Identification of high-speed trains hunting states based on dynamic simulation data. China Meas. Test 2021, 47, 120–126. [Google Scholar]
- Li, F.; Yang, S.; Yang, Z.; Shi, H.; Zeng, J.; Ye, Y. A novel vertical elastic vibration reduction for railway vehicle carbody based on minimum generalized force principle. Mech. Syst. Signal Process. 2023, 189, 110035. [Google Scholar] [CrossRef]
- Ye, Y.; Wei, L.; Li, F.; Zeng, J.; Hecht, M. Multislice Time-Frequency image Entropy as a feature for railway wheel fault diagnosis. Measurement 2023, 216, 112862. [Google Scholar] [CrossRef]
- Ye, Y.; Zhu, B.; Huang, P.; Peng, B. OORNet: A deep learning model for on-board condition monitoring and fault diagnosis of out-of-round wheels of high-speed trains. Measurement 2022, 199, 111268. [Google Scholar] [CrossRef]
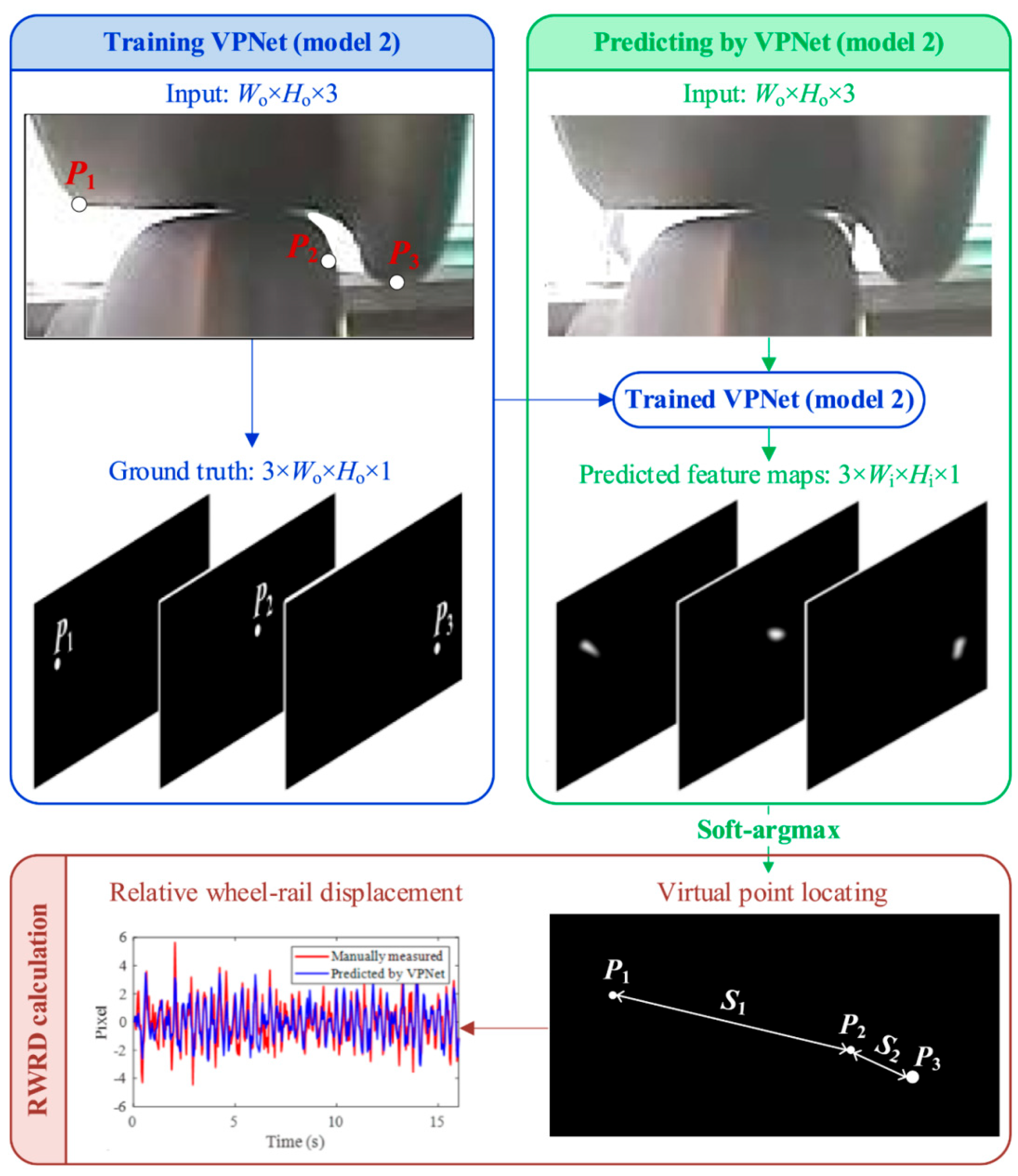
- Shi, D.; Šabanovič, E.; Rizzetto, L.; Skrickij, V.; Oliverio, R.; Kaviani, N.; Ye, Y.; Bureika, G.; Ricci, S.; Hecht, M. Deep learning based virtual point tracking for real-time target-less dynamic displacement measurement in railway applications. Mech. Syst. Signal Process. 2022, 166, 108482. [Google Scholar] [CrossRef]
- Ye, Y.; Gao, H.; Huang, C.; Li, H.; Shi, D.; Dai, H.; Wu, P.; Zeng, J. Computer vision for hunting stability inspection of high-speed trains. Measurement 2023, 220, 113361. [Google Scholar] [CrossRef]
- Ning, J.; Fang, M.; Ran, W.; Chen, C.; Li, Y. Rapid multi-sensor feature fusion based on non-stationary kernel JADE for the small-amplitude hunting monitoring of high-speed trains. Sensors 2020, 20, 3457. [Google Scholar] [CrossRef] [PubMed]
- Guan, Q.; Du, X.; Wen, Z.; Liang, S.; Chi, M. Vibration characteristics of bogie hunting motion based on root loci curves. Acta Mech. Sin. 2022, 38, 521447. [Google Scholar] [CrossRef]
- Zhao, F.; Ning, J.; Li, Y.; Chen, C. A detection method for hunting instability of high-speed trains based on SIMPACK simulation analysis. Mod. Manuf. Eng. 2022, 496, 98. [Google Scholar]
- Han, C.; Su, H.; Sun, J. Analysis of the Impact of Primary Suspension Stiffness on Vehicle Hunting Motions. Electr. Drive Locomot. 2021, 62, 42–47. [Google Scholar]
- Sun, J.; Chi, M.; Cai, W.; Gao, H.; Liang, S. An investigation into evaluation methods for ride comfort of railway vehicles in the case of carbody hunting instability. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2021, 235, 586–597. [Google Scholar] [CrossRef]
- Xia, Z.; Zhou, J.; Liang, J.; Ding, S.; Gong, D.; Sun, W.; Sun, Y. Online detection and control of car body low-frequency swaying in railway vehicles. Veh. Syst. Dyn. 2021, 59, 70–100. [Google Scholar] [CrossRef]
- Cui, T.; Sun, J. An evaluation method for car-body hunting of railway vehicles based on peak count. Electr. Drive Locomot. 2022, 63, 53–58. [Google Scholar]
- Sun, J. Study on Complex Behavior Characteristics and Diagnosis Method of Hunting Stability for High-Speed EMUs; Southwest Jiaotong University: Chengdu, China, 2021. [Google Scholar]
- Wang, Q.; Li, D.; Zeng, J.; Peng, X.; Wei, L.; Du, W. A diagnostic method of freight wagons hunting performance based on wayside hunting detection system. Measurement 2024, 227, 114274. [Google Scholar] [CrossRef]
- Sun, J.; Meli, E.; Song, X.; Chi, M.; Jiao, W.; Jiang, Y. A novel measuring system for high-speed railway vehicles hunting monitoring able to predict wheelset motion and wheel/rail contact characteristics. Veh. Syst. Dyn. 2023, 61, 1621–1643. [Google Scholar] [CrossRef]
- Gasparetto, L.; Alfi, S.; Bruni, S. Data-driven condition-based monitoring of high-speed railway bogies. Int. J. Rail Transp. 2013, 1, 42–56. [Google Scholar] [CrossRef]
- Kulkarni, R.; Qazizadeh, A.; Berg, M. Unsupervised rail vehicle running instability detection algorithm for passenger trains (iVRIDA). Measurement 2023, 216, 112894. [Google Scholar] [CrossRef]
- Yang, S.; Gu, X.; Liu, Y.; Deng, F.; Liu, Z.; Liu, W.; Wang, B. Review of Dynamic Mechanism and Fault Diagnosis for Key Rotating Components of Bogies. J. Mech. Eng. 2023, 59, 225–243. [Google Scholar]
- Marshall, C.F.D. History of British Railways down to the Year; Oxford University Press: Oxford, UK, 1938. [Google Scholar]
- Klingel, W. Uber den Lauf der Eisenbahnwagen auf gerader Bahn. Organ Fortschritte Eisenbahnwesens Tech. Bezieh. 1883. [Google Scholar]
- Carter, F. The Electric Locomotive (Including Appendix and Plate at Back of Volume). In Minutes of the Proceedings of the Institution of Civil Engineers; Thomas Telford-ICE Virtual Library: London, UK, 1916; pp. 221–252. [Google Scholar]
- Matsudaira, T. Paper 7: Hunting problem of high-speed railway vehicles with special reference to bogie design for the new tokaido line. In Proceedings of the Institution of Mechanical Engineers, Conference Proceedings; Sage: London, UK, 1965; pp. 58–66. [Google Scholar]
- Dumitriu, M.; Leu, M.C. Correlation between Ride Comfort Index and Sperling’s Index for Evaluation Ride Comfort in Railway Vehicles. Appl. Mech. Mater. 2018, 880, 201–206. [Google Scholar] [CrossRef]
- Jiang, Y.; Chen, B.K.; Thompson, C. A comparison study of ride comfort indices between Sperling’s method and EN 12299. Int. J. Rail Transp. 2019, 7, 279–296. [Google Scholar] [CrossRef]
- Deng, C.; Zhou, J.; Thompson, D.; Gong, D.; Sun, W.; Sun, Y. Analysis of the consistency of the Sperling index for rail vehicles based on different algorithms. Veh. Syst. Dyn. 2021, 59, 313–330. [Google Scholar] [CrossRef]
- Chi, M.; Cai, W.; Liang, S.; Li, Y.; Sun, J.; Jin, X.; He, X. Influences of Rail Grinding Deviations on Vehicle Dynamics Performances of High Speed Railways. China Mech. Eng. 2019, 30, 13–17. [Google Scholar]
- Sun, J.; Gong, J.; Chi, M.; Jiang, Y.; Jiao, W.; E, S. Dynamic analysis of ultra-low frequency carbody swaying for a high-speed rail vehicle: Causes and measures. J. Vib. Control 2024. [Google Scholar] [CrossRef]
- Feng, Y.; Zhang, Z.; Liang, H. Research on the causes and improvement measures for low-frequency shaking of emu. Railw. Locomot. Car 2021, 41, 11–16. [Google Scholar]
- Li, R.; Luo, R. Influence of low wheel/rail friction coefficient on lateral movement stability of high speed train. Mech. Eng. Autom. 2017, 1, 20–21. [Google Scholar]
- Jiang, C.; Zhang, H.; Ling, L.; Ma, X.; Gao, J.; Ding, X.; Wang, K.; Zhai, W. The effect of yaw damper performance degradation on carbody hunting of high-speed trains. Veh. Syst. Dyn. 2024, 1–24. [Google Scholar] [CrossRef]
- Gao, H.; Sun, J.; Shiju, E.; Chi, M. Cavitation induced hydraulic yaw damper failure and its effect on railway vehicle dynamic stability. Eng. Fail. Anal. 2024, 161, 108318. [Google Scholar] [CrossRef]
- Guo, Z.; Chi, M.; Sun, J.; Li, Y.; Dai, L. Experimental and numerical research on the bogie hunting of a high-speed train caused by the empty stroke of yaw damper. Veh. Syst. Dyn. 2024, 62, 1637–1657. [Google Scholar] [CrossRef]
- Wang, W.; Huang, Y.; Yang, X.; Xu, G. Non-linear parametric modelling of a high-speed rail hydraulic yaw damper with series clearance and stiffness. Nonlinear Dyn. 2011, 65, 13–34. [Google Scholar] [CrossRef]
- Xia, Z.; Zhou, J.; Gong, D.; Sun, W.; Sun, Y. Theoretical study on the effect of the anti-yaw damper for rail vehicles. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 234, 457–473. [Google Scholar] [CrossRef]
- Song, Z.; Wang, H.; Hu, X.; Sun, C.; Cheng, D.; Li, Q. Study on Influence of Stiffness of Service Nodal Point of Rotary Arm on Operation Vehicle Dynamics. J. China Railw. Soc. 2020, 42, 35–42. [Google Scholar]
- Ye, Y.-M.; Gong, Z.-H. Analysis of the cause and prevention for the swing of locomotives. J. China Railw. Soc. 2003, 25, 113–117. [Google Scholar]
- Zhang, B.; Guan, Q.; Li, W.; Zhou, Y.; Wen, Z. Influence of track irregularity and wheel-rail profile compatibility on metro vehicle sway. J. Zhejiang Univ. 2022, 56, 1772–1779. [Google Scholar]
- Li, W.; Qi, Y.; Wen, Z.; Chi, M.; Wang, H.; Li, X.; Zhang, X.; Sun, J. Coupling effect of track irregularity and wheel-rail contact conicity on carbody swaying of a metro vehicle: An experimental investigation. Veh. Syst. Dyn. 2024, 1–20. [Google Scholar] [CrossRef]
- Li, W.; Guan, Q.; Chi, M.; Wen, Z.; Sun, J. An investigation into the influence of wheel-rail contact relationships on the carbody hunting stability of an electric locomotive. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2022, 236, 1198–1209. [Google Scholar] [CrossRef]
- Liu, X.; Markine, V.L. Train hunting related fast degradation of a railway crossing—Condition monitoring and numerical verification. Sensors 2020, 20, 2278. [Google Scholar] [CrossRef] [PubMed]
- Ding, X.; Chang, C.; Ling, L.; Sun, Z.; Yu, Y.; Zhang, L.; Zhai, W. Mechanism analysis of low-frequency swaying motion of high-speed trains induced by aerodynamic loads. J. Vib. Control 2023. [Google Scholar] [CrossRef]
- Sun, L.; Wang, Y.; Hu, X.; Li, H.; Cheng, D. Influence of Wind Load on the Hunting Stability of High-Speed Trains. China Railw. Sci. 2023, 44, 177–186. [Google Scholar]
- Hu, Z.; Chi, M.; Zhou, Y.; Dai, L.; Liang, S.; Chen, J.; Sun, J. Mechanism of Tail Lateral Sway of City EMUs in Single-track Tunnel. J. Mech. Eng. 2024, 72, 1–9. [Google Scholar]
- Sun, L.; Li, X.; Hu, X.; Chang, C.; Cheng, D.; Zhou, C. Influence of Wheel Wear on Wheel-Rail Contact Relationship and Vehicle Dynamic Performance of High-Speed EMU. China Railw. Sci. 2020, 41, 117–126. [Google Scholar]
- Lin, F.; Jia, Z.; Weng, T.; Chen, W.; Zhang, Z.; Fang, Q. Analysis of the impact of wheel recess characteristic index on vehicle running performance. J. Railw. Sci. Eng. 2023, 20. [Google Scholar]
- Polach, O. Comparability of the non-linear and linearized stability assessment during railway vehicle design. Veh. Syst. Dyn. 2006, 44, 129–138. [Google Scholar] [CrossRef]
- Polach, O. On non-linear methods of bogie stability assessment using computer simulations. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2006, 220, 13–27. [Google Scholar] [CrossRef]
- Polach, O. Characteristic parameters of nonlinear wheel/rail contact geometry. Veh. Syst. Dyn. 2010, 48, 19–36. [Google Scholar] [CrossRef]
- Wen, Y.; Dong, H.; Wang, X.; Zong, Z.; Wu, J. Stability Evolution of Hunting Motion in Subway Vehicles Under Service Conditions. In Proceedings of the 14th National Conference on Vibration Theory and Application (NVTA2021)-Abstract Collection, Tianjin, China, 22–25 October 2021. [Google Scholar]
- Sun, J.; Chi, M.; Jiao, W.; Jiang, Y.; Li, G.; Shi, J. Modal parameters-based hunting stability analysis of high-speed railway vehicles considering full range of equivalent conicity. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2022, 236, 422–439. [Google Scholar] [CrossRef]
- Sun, J.; Jiao, W.; Jiang, Y.; Tang, C.; Ur Rehman, A.; Shiju, E. Hunting frequency variation mechanism and its effect on carbody hunting stability for railway vehicles. Acta Mech. Sin. 2023, 39, 523046. [Google Scholar] [CrossRef]
- Kritikakos, K.; Fassois, S.; Sakellariou, J. Robust early detection of hunting on railway vehicles: Single-sensor based methods and critical comparisons. Int. J. Rail Transp. 2024, 12, 437–457. [Google Scholar] [CrossRef]
- True, H. On the theory of nonlinear dynamics and its applications in vehicle systems dynamics. Veh. Syst. Dyn. 1999, 31, 393–421. [Google Scholar] [CrossRef]
- Zhao, D.; Liu, S.; Gu, D.; Sun, X.; Wang, L.; Wei, Y.; Zhang, H. Enhanced data-driven fault diagnosis for machines with small and unbalanced data based on variational auto-encoder. Meas. Sci. Technol. 2019, 31, 035004. [Google Scholar] [CrossRef]
- Ding, Y.; Ma, L.; Ma, J.; Wang, C.; Lu, C. A generative adversarial network-based intelligent fault diagnosis method for rotating machinery under small sample size conditions. IEEE Access 2019, 7, 149736–149749. [Google Scholar] [CrossRef]
- Yang, X.; Ye, T.; Yuan, X.; Zhu, W.; Mei, X.; Zhou, F. A novel data augmentation method based on denoising diffusion probabilistic model for fault diagnosis under imbalanced data. IEEE Trans. Ind. Inform. 2024, 20, 7820–7831. [Google Scholar] [CrossRef]
- Yu, T.; Li, C.; Huang, J.; Xiao, X.; Zhang, X.; Li, Y.; Fu, B. ReF-DDPM: A novel DDPM-based data augmentation method for imbalanced rolling bearing fault diagnosis. Reliab. Eng. Syst. Saf. 2024, 251, 110343. [Google Scholar] [CrossRef]
- Wang, D.; Ning, J.; Zhao, F.; Li, Y.; Chen, C. A small-amplitude hunting motion recognition method based on transfer learning. J. Vib. Control 2023, 29, 4384–4395. [Google Scholar] [CrossRef]
- Pan, S.J.; Yang, Q. A survey on transfer learning. IEEE Trans. Knowl. Data Eng. 2009, 22, 1345–1359. [Google Scholar] [CrossRef]
- Zhuang, F.; Luo, P.; Du, C.; He, Q.; Shi, Z. Triplex transfer learning: Exploiting both shared and distinct concepts for text classification. In Proceedings of the Sixth ACM International Conference on Web Search and Data Mining, Rome, Italy, 2–8 February 2013; pp. 425–434. [Google Scholar]
- Hu, D.; Yang, Q. Transfer learning for activity recognition via sensor mapping. In Proceedings of the Twenty-Second International Joint Conference on Artificial Intelligence, Barcelona, Spain, 16–22 July 2011; p. 1962. [Google Scholar]
- Tang, X.; Du, B.; Huang, J.; Wang, Z.; Zhang, L. On combining active and transfer learning for medical data classification. IET Comput. Vis. 2019, 13, 194–205. [Google Scholar] [CrossRef]
- Maqsood, M.; Nazir, F.; Khan, U.; Aadil, F.; Jamal, H.; Mehmood, I.; Song, O.-Y. Transfer learning assisted classification and detection of Alzheimer’s disease stages using 3D MRI scans. Sensors 2019, 19, 2645. [Google Scholar] [CrossRef] [PubMed]
- Petegrosso, R.; Park, S.; Hwang, T.H.; Kuang, R. Transfer learning across ontologies for phenome-genome association prediction. Bioinformatics 2017, 33, 529–536. [Google Scholar] [CrossRef] [PubMed]
- Dong, Y.; Li, Y.; Zheng, H.; Wang, R.; Xu, M. A new dynamic model and transfer learning based intelligent fault diagnosis framework for rolling element bearings race faults: Solving the small sample problem. ISA Trans. 2022, 121, 327–348. [Google Scholar] [CrossRef]
- Ganin, Y.; Lempitsky, V. Unsupervised domain adaptation by backpropagation. In Proceedings of the International Conference on Machine Learning, Lille, France, 7–9 July 2015; pp. 1180–1189. [Google Scholar]
- Xiao, Y.; Shao, H.; Han, S.; Huo, Z.; Wan, J. Novel joint transfer network for unsupervised bearing fault diagnosis from simulation domain to experimental domain. IEEE/ASME Trans. Mechatron. 2022, 27, 5254–5263. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Standard | Frequency Ranges | RMS Calculation Window | Threshold Value | Signal Source |
|---|---|---|---|---|
| UIC 518 | Hz | 100 m in length with a step size not exceeding 10 m | kN | Wheel-rail guiding force/axlebox transverse force |
| Bogie frame acceleration | ||||
| EN 14363 | Hz | 100 m in length with a step size not exceeding 10 m | kN | Wheel-rail guiding force/axlebox transverse force |
| Bogie frame acceleration | ||||
| 49CFR 213 | 10 Hz | 2 s | Not exceeding 0.3 g | Bogie frame acceleration |
| UIC 515-1 | 10 Hz | _ | continuously over six instances | Bogie frame acceleration |
| TSI RST HS 232 | 3~9 Hz | _ | Not exceed 0.8 g continuously across 10 instances | Bogie frame acceleration |
| GB/T 5599-2019 | 0.5~10 Hz | _ | continuously across six instances. | Bogie frame acceleration |
| Reference | Influence Type | Influencing Factor | Influence Pattern | Affected Object |
|---|---|---|---|---|
| [4,19] | Wheel-Rail Contact Relationship | Wheel tread conical wear | Abnormal high conicity caused by wheel tread conical wear induces instability, and the instability increases with the conicity and tread wear. | Bogie hunting |
| [73] | Wheel-Rail Contact Relationship | Over-grinding of rail heads | Under over-grinding conditions, wheel–rail contact points concentrate on the tread root circle and rail shoulder, leading to abnormal increase in equivalent conicity. | Bogie hunting |
| [14] | Wheel-Rail Contact Relationship | Excessive rail shoulder wear and excessive rail cant | Excessive rail cant and over-grinding at the inner corner of the rail lead to extremely low wheel-rail contact conicity. | Carbody hunting |
| [74] | Wheel-Rail Contact Relationship | Wheel tread wear flatness | Flattened wheel tread causes abnormal low conicity in wheel-rail contact. | Carbody hunting |
| [75] | Wheel-Rail Contact Relationship | Wheel turning | The overall movement of the wheel profile towards the flange decreases the equivalent conicity. | Carbody hunting |
| [76] | Wheel-Rail Contact Relationship | Low wheel-rail friction coefficient | Low friction coefficient reduces adhesion between wheel and rail, leading to wheel hunting. | Carbody hunting |
| [77] | Suspension Component Damage | Blockage of yaw damper valve | Blockage of the damper valve significantly increases the damping force and dynamic stiffness of the yaw damper. | Carbody hunting |
| [78] | Suspension Component Damage | Cavitation in hydraulic yaw damper | Cavitation phenomenon leads to damping force generated only during a single stroke of extension or compression. | Bogie hunting |
| [79] | Suspension Component Damage | Compression air stroke in yaw damper | Compression air stroke in yaw damper causes abnormal stiffness and damping. | Bogie hunting |
| [80] | Suspension Component Damage | Parameter variations in yaw damper | Increased temperature lowers the dynamic viscosity of the oil, weakening the damping capability of the hydraulic yaw damper; larger attachment stiffness results in a greater reduction in effective damping coefficient; larger gaps cause greater inertial impacts. | — |
| [81] | Suspension Component Damage | Changes in equivalent damping and stiffness of yaw damper | Increased equivalent damping and stiffness decrease the frequency of bogie hunting motion. | Bogie hunting |
| [7] | Wheel-Rail Contact and Suspension Component Damage Interaction | Changes in equivalent conicity and dynamic damping | Reduction in yaw damper damping decreases the minimum damping ratio, with lower equivalent conicity leading to a larger reduction. | Carbody hunting |
| [82] | Vehicle Structural Damage | Change in nodal point of rotary arm stiffness | Increasing the longitudinal stiffness of the nodal point of the rotary arm can lower the vehicle’s nonlinear critical speed and increase wheel-rail wear. | Carbody hunting |
| [84] | Track Irregularity | Frequency resonance | Track excitation frequency, bogie hunting frequency, and carbody hunting or rolling modal frequency are simultaneously close. | Carbody hunting |
| [85,86] | Track Irregularity | Frequency resonance | Frequency coupling resonance occurs between track excitation frequency, bogie hunting frequency, and carbody modal frequency. | Carbody hunting |
| [87] | Track Irregularity | Track geometry misalignment | Track geometry misalignments before intersections can induce hunting motion in trains. | — |
| [88] | Aerodynamic Load | Aerodynamic vortex | The aerodynamic vortex at the rear of the train induces yaw frequency of the rear vehicle. | Carbody hunting |
| [6] | Aerodynamic Load | Lift flow | The lift flow generated by the HST rear car at high speed can excite its low-frequency hunting movement. | Carbody hunting |
| [89] | Aerodynamic Load | Aerodynamic force | Combined conditions of large equivalent aerodynamic lateral force and large aerodynamic lift are prone to primary hunting occurrence. | Carbody hunting |
| [90] | Aerodynamic Load | Aerodynamic force | Large yaw moment in aerodynamic force and its primary frequency coupled resonance with the whole vehicle hunting frequency. | Carbody hunting |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, J.; Sun, J.; Jiang, Y.; Pan, W.; Jiao, W. Advances and Challenges in the Hunting Instability Diagnosis of High-Speed Trains. Sensors 2024, 24, 5719. https://doi.org/10.3390/s24175719
Liang J, Sun J, Jiang Y, Pan W, Jiao W. Advances and Challenges in the Hunting Instability Diagnosis of High-Speed Trains. Sensors. 2024; 24(17):5719. https://doi.org/10.3390/s24175719
Chicago/Turabian StyleLiang, Jiayi, Jianfeng Sun, Yonghua Jiang, Weifang Pan, and Weidong Jiao. 2024. "Advances and Challenges in the Hunting Instability Diagnosis of High-Speed Trains" Sensors 24, no. 17: 5719. https://doi.org/10.3390/s24175719