Analysis of the Spatial Distribution and Common Mode Error Correlation in a Small-Scale GNSS Network

Abstract
1. Introduction
2. Materials and Methods
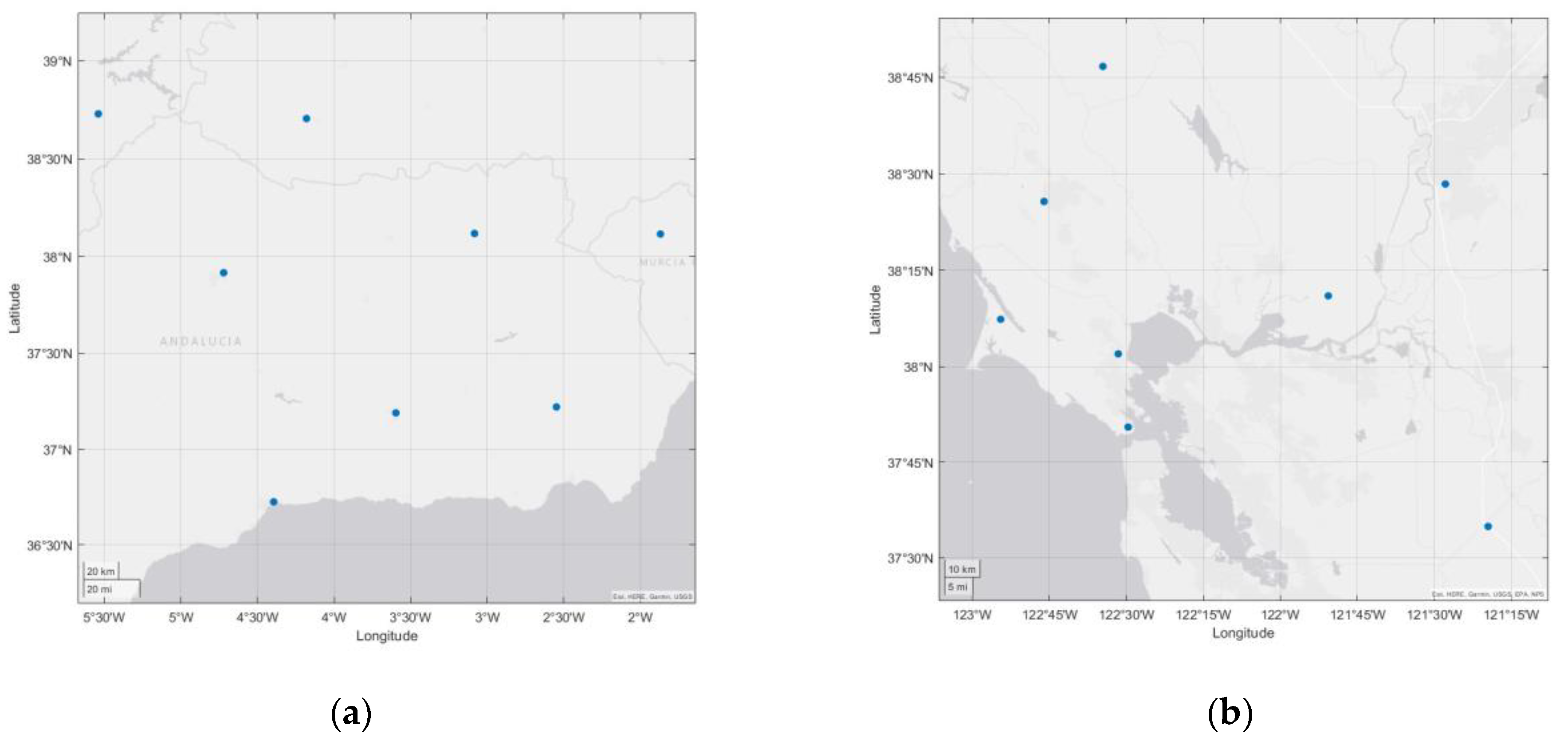
2.1. GNSS Data Source
2.2. Common Mode Error Analysis Methods
2.2.1. Regional Stacking Filter Method
2.2.2. Correlation Coefficient Weighted Stacking Filter
2.2.3. Correlation Coefficient Weighted Independent Component Analysis
3. Results
3.1. Analysis of Common Mode Error Correlation among Stations
3.2. Improved Weighted Independent Component Analysis Method
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jiang, W.; Wang, K.; Li, Z.; Zhou, X.; Ma, Y.; Ma, J. Theory and Methods of GNSS Coordinate Time Series Analysis and Prospects. J. Wuhan Univ. (Inf. Sci. Ed.) 2018, 43, 2112–2123. [Google Scholar] [CrossRef]
- Arias-Gallegos, A.; Borque-Arancón, M.J.; Gil-Cruz, A.J. Present-Day Crustal Velocity Field in Ecuador from cGPS Position Time Series. Sensors 2023, 23, 3301. [Google Scholar] [CrossRef] [PubMed]
- Habboub, M.; Psimoulis, P.A.; Bingley, R.; Rothacher, M. A Multiple Algorithm Approach to the Analysis of GNSS Coordinate Time Series for Detecting Geohazards and Anomalies. JGR Solid Earth 2020, 125, e2019JB018104. [Google Scholar] [CrossRef]
- Li, Z.; Yue, J.; Li, W.; Lu, D. Investigating Mass Loading Contributes of Annual GPS Observations for the Eurasian Plate. J. Geodyn. 2017, 111, 43–49. [Google Scholar] [CrossRef]
- Langbein, J. Noise in GPS Displacement Measurements from Southern California and Southern Nevada. J. Geophys. Res. 2008, 113, 2007JB005247. [Google Scholar] [CrossRef]
- Mao, A.; Harrison, C.G.A.; Dixon, T.H. Noise in GPS Coordinate Time Series. J. Geophys. Res. 1999, 104, 2797–2816. [Google Scholar] [CrossRef]
- Williams, S.D.P.; Bock, Y.; Fang, P.; Jamason, P.; Nikolaidis, R.M.; Prawirodirdjo, L.; Miller, M.; Johnson, D.J. Error Analysis of Continuous GPS Position Time Series. J. Geophys. Res. 2004, 109, 2003JB002741. [Google Scholar] [CrossRef]
- Li, X.; Li, W.; Xie, X.; Huang, Y. Improved Stacking Filtering Method Considering Multiple Weight Factors. Surv. Mapp. Bull. 2023, 7, 91–96. [Google Scholar] [CrossRef]
- King, M.A.; Altamimi, Z.; Boehm, J.; Bos, M.; Dach, R.; Elosegui, P.; Fund, F.; Hernández-Pajares, M.; Lavallee, D.; Mendes Cerveira, P.J.; et al. Improved Constraints on Models of Glacial Isostatic Adjustment: A Review of the Contribution of Ground-Based Geodetic Observations. Surv. Geophys. 2010, 31, 465–507. [Google Scholar] [CrossRef]
- Wang, Y.; Cao, H.; Shang, J.; Li, S.; Yan, Y.; Zhan, W. Study on Common Mode Error Removal in the Spatial Domain of GNSS Coordinate Time Series. J. Geod. Geodyn. 2023, 43, 551–555. [Google Scholar] [CrossRef]
- Yan, L.; Luo, Z.; Li, M.; Zou, X. Research on Extraction Methods of Common Mode Error in GPS Coordinate Time Series. Glob. Position. Syst. 2022, 47, 54–59. [Google Scholar]
- Tian, Y.; Shen, Z.-K. Extracting the Regional Common-Mode Component of GPS Station Position Time Series from Dense Continuous Network. J. Geophys. Res.-Solid Earth 2016, 121, 1080–1096. [Google Scholar] [CrossRef]
- Dong, D.; Fang, P.; Bock, Y.; Webb, F.; Prawirodirdjo, L.; Kedar, S.; Jamason, P. Spatiotemporal Filtering Using Principal Component Analysis and Karhunen-Loeve Expansion Approaches for Regional GPS Network Analysis. J. Geophys. Res. 2006, 111, 2005JB003806. [Google Scholar] [CrossRef]
- Shen, Y.; Li, W.; Xu, G.; Li, B. Spatiotemporal Filtering of Regional GNSS Network’s Position Time Series with Missing Data Using Principle Component Analysis. J. Geod. 2014, 88, 1–12. [Google Scholar] [CrossRef]
- Wu, S. Analysis of Characteristics of Regional CORS Station Coordinate Time Series. Master’s Thesis, Wuhan University, Wuhan, China, 2017. [Google Scholar]
- Wang, F. Analysis and Research on Coordinate Time Series of Regional CORS Reference Stations. Master’s Thesis, Information Engineering University of Strategic Support Force, Zhengzhou, China, 2020. [Google Scholar]
- Tian, Y.; Shen, Z. Progress in Research on Methods for Removing Non-Tectonic Noise in GPS Coordinate Time Series. Acta Seismol. Sin. 2009, 31, 68–81+117. [Google Scholar]
- Tian, Y. Study on Medium- and Long-Term Errors in GPS Position Time Series. Ph.D. Dissertation, Institute of Geology, China Earthquake Administration, Beijing, China, 2011. [Google Scholar]
- Xie, S.; Pan, P.; Zhou, X. Research on Methods for Extracting Common-Mode Errors in Large-Scale GPS Networks. J. Wuhan Univ. (Inf. Sci. Ed.) 2014, 39, 1168–1173. [Google Scholar] [CrossRef]
- He, X. Research on Noise Model Estimation Methods for GPS Coordinate Time Series. Ph.D. Dissertation, Wuhan University, Wuhan, China, 2016. [Google Scholar]
- Zhang, J.; Bock, Y.; Johnson, H.; Fang, P.; Williams, S.; Genrich, J.; Wdowinski, S.; Behr, J. Southern California Permanent GPS Geodetic Array: Error Analysis of Daily Position Estimates and Site Velocities. J. Geophys. Res. Solid Earth 1997, 102, 18035–18055. [Google Scholar] [CrossRef]
- Wdowinski, S.; Bock, Y.; Zhang, J.; Fang, P.; Genrich, J. Southern California Permanent GPS Geodetic Array: Spatial Filtering of Daily Positions for Estimating Coseismic and Postseismic Displacements Induced by the 1992 Landers Earthquake. J. Geophys. Res. 1997, 102, 18057–18070. [Google Scholar] [CrossRef]
- Hu, L.; Zhou, Y.; Wang, W. Research on the Extraction of Terrestrial Network Common Mode Errors. Surv. Mapp. Sci. 2019, 44, 37–42+60. [Google Scholar] [CrossRef]
- Marquez-Azua, B.; DeMets, C. Crustal velocity field of Mexico from continuous GPS measurements, 1993 to June 2001: Implications for the neotectonics of Mexico. J. Geophys. Res. 2003, 108, 2450. [Google Scholar] [CrossRef]
- Sun, Y.; Xu, S.; Cui, Z.; Zhou, H. Impact of Common Mode Errors on Coordinate Time Series Analysis. Beijing Surv. Mapp. 2020, 34, 113–117. [Google Scholar] [CrossRef]
- Gong, G.; He, X.; Hua, X.; Shu, Y.; Ding, L. Spatial Response Analysis of Common Mode Errors in GPS Networks. Geod. Geodyn. 2016, 36, 951–957. [Google Scholar] [CrossRef]
- Zhou, M.; Guo, J.; Shen, Y.; Kong, Q.; Yuan, J. Extraction of Common Mode Errors in GNSS Coordinate Time Series Based on Multi-Channel Singular Spectrum Analysis. Chin. J. Geophys. 2018, 61, 4383–4395. [Google Scholar]
- Ming, F.; Yang, Y.; Zeng, A. Comparison of PCA and ICA Methods for Extracting Common Mode Errors. Geod. Geodyn. 2017, 37, 385–389. [Google Scholar] [CrossRef]
- Ming, F.; Yang, Y.; Zeng, A.; Zhao, B. Spatiotemporal Filtering for Regional GPS Network in China Using Independent Component Analysis. J. Geod. 2017, 91, 419–440. [Google Scholar] [CrossRef]
- Hou, Z.; Guo, Z.; Du, J. Study of Three Spatiotemporal Filtering Methods for Small-Scale GNSS Networks. Surv. Mapp. Sci. 2018, 43, 135–140. [Google Scholar] [CrossRef]
- Boergens, E.; Rangelova, E.; Sideris, M.G.; Kusche, J. Assessment of the Capabilities of the Temporal and Spatiotemporal ICA Method for Geophysical Signal Separation in GRACE Data. JGR Solid Earth 2014, 119, 4429–4447. [Google Scholar] [CrossRef]
- Liu, B.; Xing, X.; Tan, J.; Xia, Q. Modeling Seasonal Variations in Vertical GPS Coordinate Time Series Using Independent Component Analysis and Varying Coefficient Regression. Sensors 2020, 20, 5627. [Google Scholar] [CrossRef]
- Bai, B.; Xiao, G.; Miao, P.; Shuai, F.; Liu, C. CMONOC II Common Mode Error Analysis and Structural Region Division Research. Remote Sens. 2024, 16, 2135. [Google Scholar] [CrossRef]
- Xu, C. Reconstruction of Gappy GPS Coordinate Time Series Using Empirical Orthogonal Functions. J. Geophys. Res.-Solid Earth 2016, 121, 9020–9033. [Google Scholar] [CrossRef]
- Nikolaidis, R. Observation of Geodetic and Seismic Deformation with the Global Positioning System. Ph.D. Thesis, University of California, San Diego, San Diego, CA, USA, 2002. [Google Scholar]
- Bruni, S.; Zerbini, S.; Raicich, F.; Errico, M.; Santi, E. Detecting Discontinuities in GNSS Coordinate Time Series with STARS: Case Study, the Bologna and Medicina GPS Sites. J. Geod. 2014, 88, 1203–1214. [Google Scholar] [CrossRef]
- Bao, Z.; Chang, G.; Zhang, L.; Chen, G.; Zhang, S. Filling Missing Values of Multi-Station GNSS Coordinate Time Series Based on Matrix Completion. Measurement 2021, 183, 109862. [Google Scholar] [CrossRef]
- Kondrashov, D.; Ghil, M. Spatio-Temporal Filling of Missing Points in Geophysical Data Sets. Nonlinear Process Geophys. 2006, 13, 151–159. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station Name | Latitude | Longitude | Height |
|---|---|---|---|
| ALMO | 38.706 | −4.18 | 743.351 |
| CAAL | 37.221 | −2.548 | 2210.684 |
| CATU | 38.73 | −5.539 | 538.65 |
| COBA | 37.916 | −4.721 | 202.074 |
| CRVC | 38.115 | −1.869 | 738.087 |
| GRA1 | 37.19 | −3.596 | 823.247 |
| MALA | 36.726 | −4.394 | 119.83 |
| VICA | 38.118 | −3.083 | 852.446 |
| Station Name | Latitude | Longitude | Height |
|---|---|---|---|
| MHDL | 37.842 | −122.494 | 65.889 |
| P193 | 38.123 | −122.908 | 66.598 |
| P197 | 38.429 | −122.767 | 0.033 |
| P206 | 38.778 | −122.576 | 283.607 |
| P255 | 37.582 | −121.325 | 73.512 |
| P266 | 38.184 | −121.844 | 22.449 |
| P268 | 38.474 | −121.464 | −23.906 |
| SVIN | 38.033 | −122.526 | −27.561 |
| Experimental Area | Experimental Area 1 | Experimental Area 2 | ||||
|---|---|---|---|---|---|---|
| Direction | E | N | U | E | N | U |
| Mean correlation coefficient before filtering | 0.49 | 0.37 | 0.48 | 0.71 | 0.56 | 0.54 |
| Mean correlation coefficient after filtering using the regional stacking filter. | 0.33 | 0.37 | 0.28 | 0.35 | 0.37 | 0.28 |
| Change rate of the mean correlation coefficient after filtering using the regional stacking filter/%. | 32.37 | 0.13 | 39.98 | 50.35 | 33.40 | 47.65 |
| Mean correlation coefficient after filtering using the correlation coefficient weighted stacking method. | 0.30 | 0.36 | 0.28 | 0.32 | 0.37 | 0.25 |
| Change rate of the mean correlation coefficient using the correlation coefficient weighted stacking method/%. | 38.70 | 2.63 | 41.08 | 54.31 | 34.42 | 53.72 |
| Experimental Area | Experimental Area 1 | Experimental Area 2 | ||||
|---|---|---|---|---|---|---|
| Direction | E | N | U | E | N | U |
| RMS before filtering (mm) | 1.92 | 2.52 | 5.85 | 2.99 | 2.43 | 6.08 |
| RMS using Regional Stacking Filter (mm) | 1.43 | 2.19 | 4.24 | 1.70 | 1.54 | 3.90 |
| RMS using Correlation Coefficient Weighted Stacking Filter (mm) | 1.40 | 2.18 | 4.20 | 1.67 | 1.53 | 3.73 |
| Method | Station | Filtering Rate/% | |||||||
|---|---|---|---|---|---|---|---|---|---|
| ALMO | CAAL | CATU | COBA | CRVC | GRA1 | MALA | VICA | ||
| RMS before filtering (mm) | 1.7949 | 1.9421 | 1.5079 | 1.5185 | 1.9404 | 2.5487 | 2.6103 | 1.515 | |
| RMS using ICA (mm) | 1.034 | 1.74 | 1.4853 | 1.4128 | 1.6331 | 2.0691 | 2.5919 | 1.1079 | 15.43 |
| RMS using WICA (mm) | 0.9254 | 1.6286 | 0.8645 | 1.1902 | 1.7138 | 1.6344 | 2.4235 | 0.90627 | 27.96 |
| Method | Station | Filtering Rate/% | |||||||
|---|---|---|---|---|---|---|---|---|---|
| ALMO | CAAL | CATU | COBA | CRVC | GRA1 | MALA | VICA | ||
| RMS before filtering (mm) | 3.4761 | 3.4241 | 1.6881 | 2.0365 | 2.3258 | 2.2333 | 3.1696 | 1.8095 | |
| RMS using ICA (mm) | 2.4014 | 2.9102 | 1.6806 | 2.0083 | 2.2036 | 1.5011 | 2.9996 | 1.7892 | 11.53 |
| RMS using WICA (mm) | 2.7561 | 2.736 | 1.6868 | 1.8261 | 2.209 | 2.1448 | 1.2765 | 1.7747 | 15.23 |
| Method | Station | Filtering Rate/% | |||||||
|---|---|---|---|---|---|---|---|---|---|
| ALMO | CAAL | CATU | COBA | CRVC | GRA1 | MALA | VICA | ||
| RMS before filtering (mm) | 5.2996 | 6.1776 | 5.1835 | 7.0438 | 5.1321 | 5.4421 | 6.7676 | 5.7815 | |
| RMS using ICA (mm) | 4.1702 | 4.9092 | 5.066 | 5.0487 | 4.0337 | 4.9144 | 4.1346 | 5.0586 | 19.36 |
| RMS using WICA (mm) | 3.8522 | 3.9428 | 4.4056 | 4.0795 | 4.1465 | 3.8767 | 4.1428 | 4.6632 | 28.33 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, A.; Wang, Y.; Guo, M. Analysis of the Spatial Distribution and Common Mode Error Correlation in a Small-Scale GNSS Network. Sensors 2024, 24, 5731. https://doi.org/10.3390/s24175731
Li A, Wang Y, Guo M. Analysis of the Spatial Distribution and Common Mode Error Correlation in a Small-Scale GNSS Network. Sensors. 2024; 24(17):5731. https://doi.org/10.3390/s24175731
Chicago/Turabian StyleLi, Aiguo, Yifan Wang, and Min Guo. 2024. "Analysis of the Spatial Distribution and Common Mode Error Correlation in a Small-Scale GNSS Network" Sensors 24, no. 17: 5731. https://doi.org/10.3390/s24175731
APA StyleLi, A., Wang, Y., & Guo, M. (2024). Analysis of the Spatial Distribution and Common Mode Error Correlation in a Small-Scale GNSS Network. Sensors, 24(17), 5731. https://doi.org/10.3390/s24175731