
Error Analysis and Optimization of Structural Parameters of Spatial Coordinate Testing System Based on Position-Sensitive Detector
Abstract
:1. Introduction
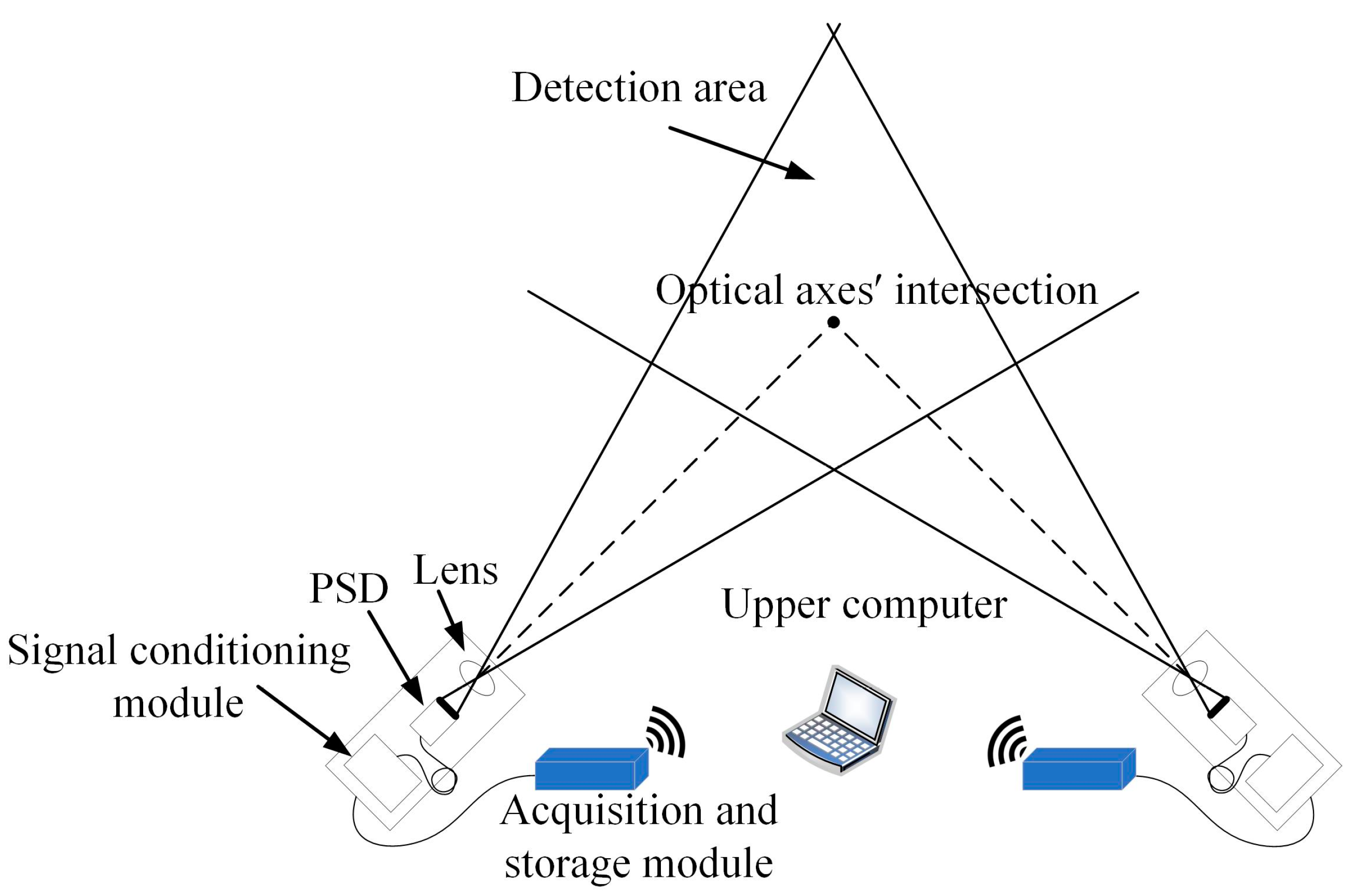
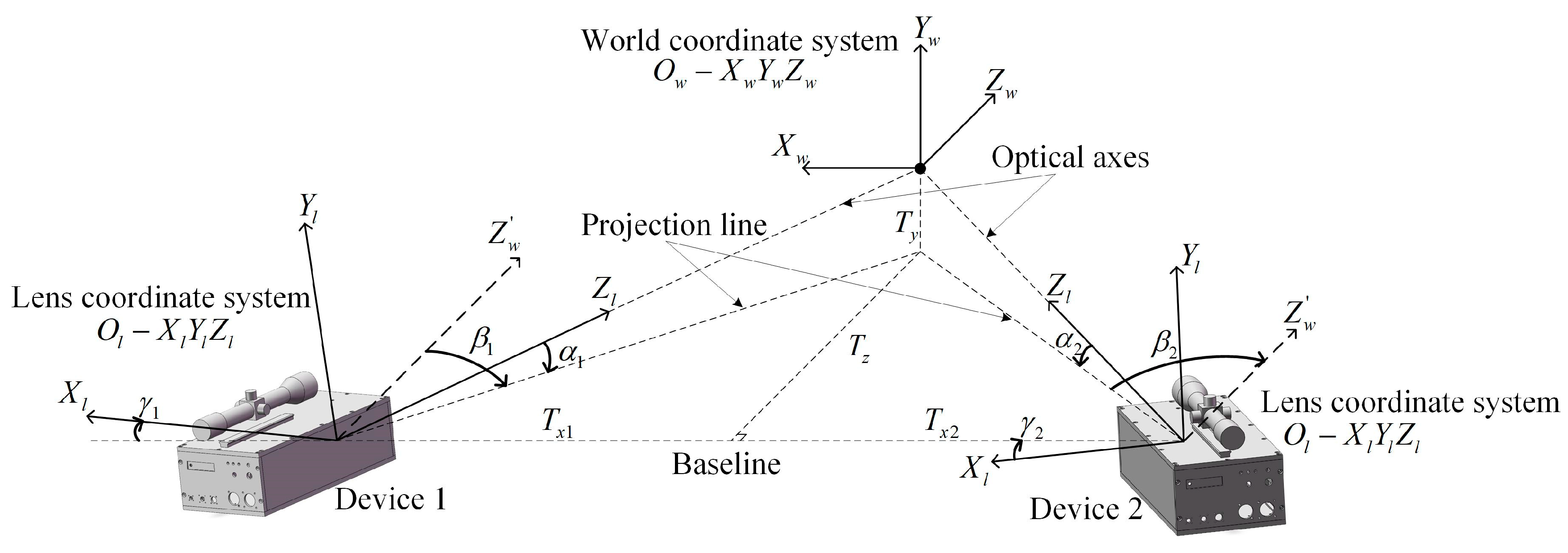
2. Principle of PSD-Based Spatial Coordinate Testing for the Explosion Point and Mathematical Model Establishment
- where the dotted line -axis is parallel to the -axis. In the lens coordinate system , looking from the positive direction of the -axis toward the origin, it is specified that the azimuth angle is positive when the coordinate system is rotated counterclockwise about the -axis. Looking from the positive direction of the -axis toward the origin, the pitch angle is specified to be positive when the coordinate system is rotated counterclockwise about the -axis.
3. Error Propagation Modeling for Structural Parameters and Deployment Optimization
3.1. Error Source Analysis and Modeling
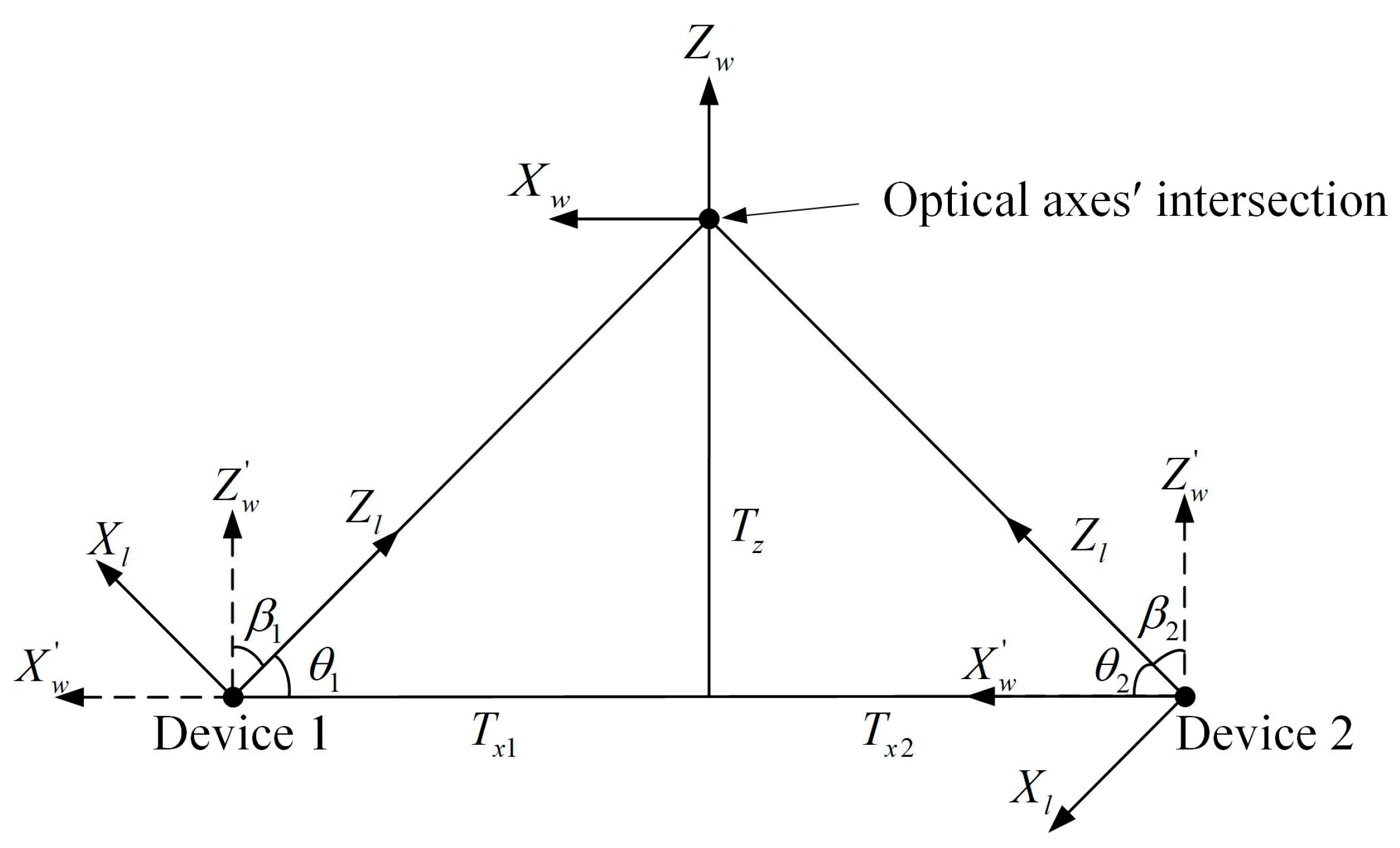
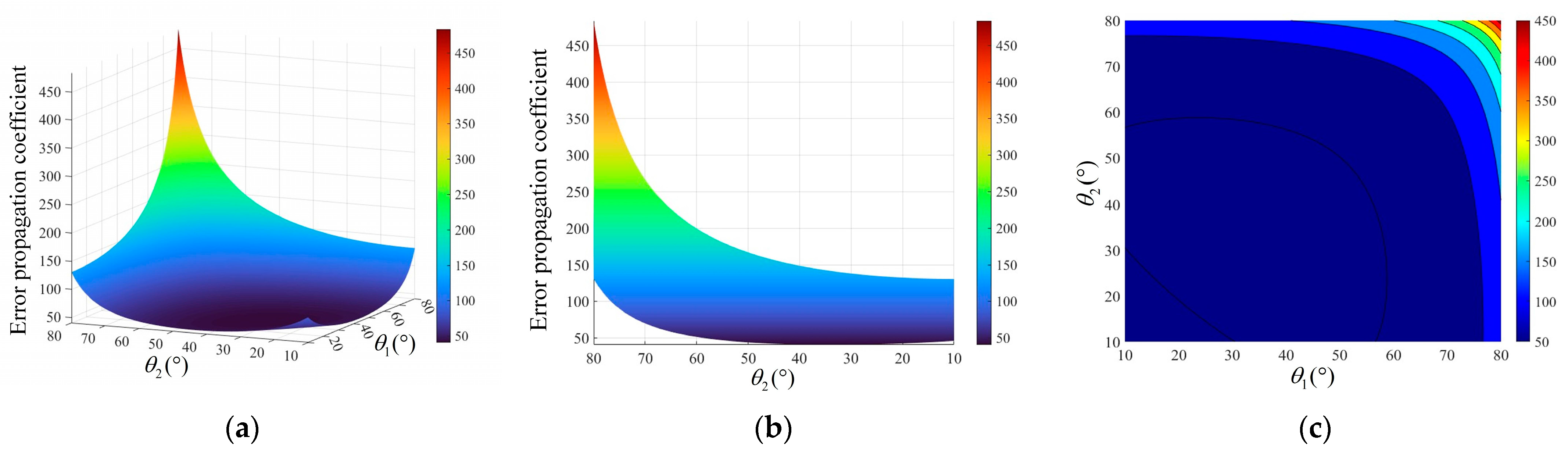
3.2. Influence of Azimuth Angle on Test Accuracy and Optimization of Deployment
3.3. Influence of Pitch Angle on Test Accuracy and Optimization of Deployment
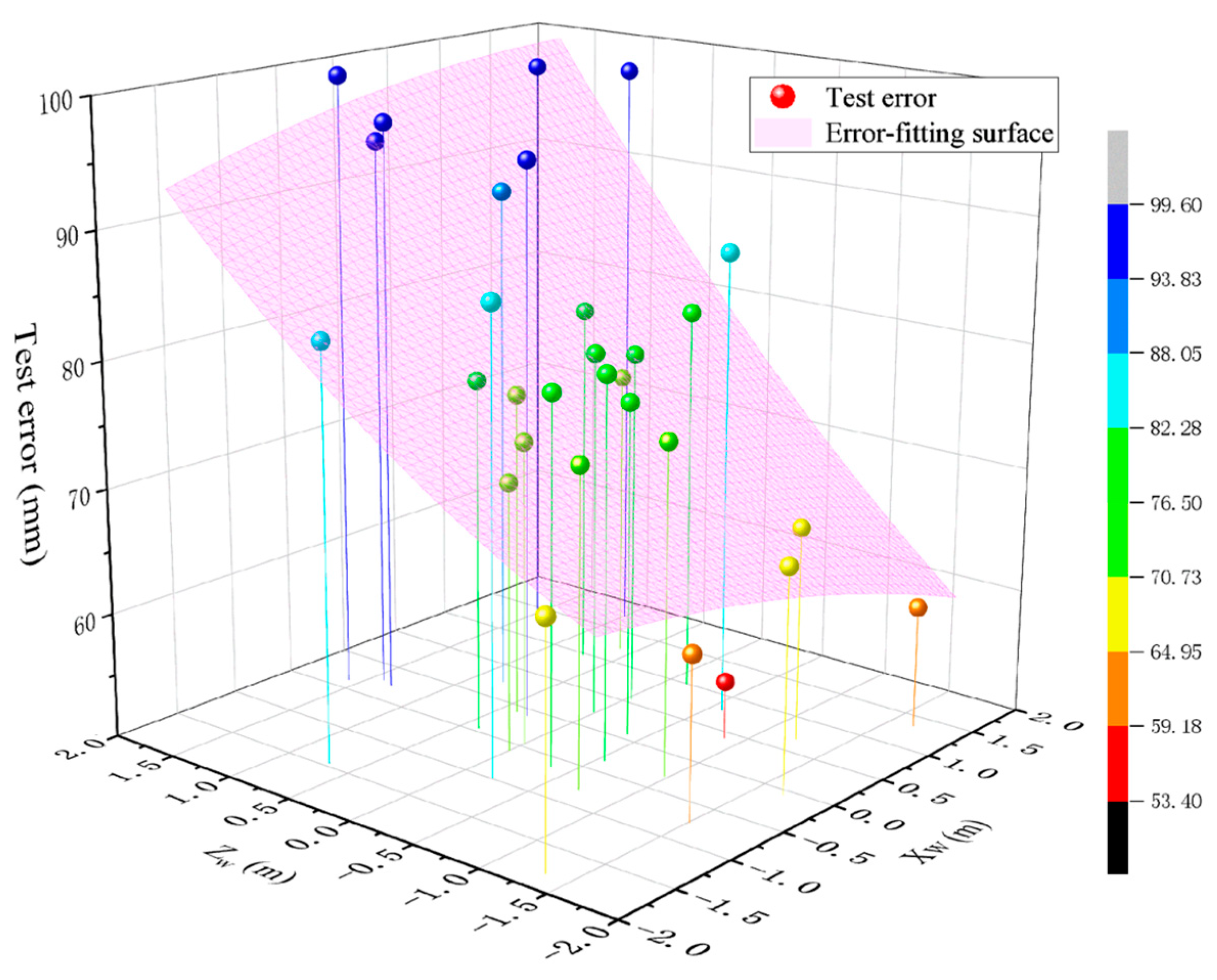
3.4. Error Distribution in the Detection Area and Optimization of Deployment
4. Experimental Protocol Design and Validation Analysis
4.1. General Experimental Protocol
4.2. Validation Experiment for the Effect of Azimuth Angle on Test Accuracy
- (1)
- Erect two devices, use a level to control the pitch angle and roll angle of the devices to zero, and use the RTK to measure the length of the baseline, then hold the position constant;
- (2)
- Place a light source anywhere in the red area, aim both devices at the center of the light source to achieve optical axes’ intersection, and measure the length of and , then calculate the azimuth angle;
- (3
- Use the flash trigger to trigger the light source, use the PSD to detect the position information of the flash, and download the waveform file to the host computer through the acquisition module;
- (4)
- Repeat steps 2 and 3 to achieve a change in the azimuth angle of the system by continuously changing the position of the optical axis intersection point in the red region;
- (5)
- Substitute the corresponding parameters of each group and the position information from the PSD into the mathematical model, then calculate the coordinate of the explosion point .
4.3. Validation Experiment for the Effect of Pitch Angle on Test Accuracy
- (1)
- Set up two devices and light sources, use a level to control the roll angle of the devices to zero, use RTK to measure the length of and and baseline, then calculate the azimuth angle, keep the position constant to control the azimuth angle constant;
- (2)
- Adjust the height of the device 1 on the left side to aim at the center of the light source at a certain angle, record the pitch angle of the device 1 with a level, and keep the attitude unchanged;
- (3)
- Arbitrarily change the height of device 2 within the adjustable range and aim at the center of the light source, then record the pitch angle with a level;
- (4)
- Use the flash trigger to trigger the light source, use the PSD to detect the position information of the flash, and download the waveform file to the host computer through the acquisition module;
- (5)
- Repeat steps 3 and 4 to achieve a change in pitch angle by constantly changing the height of the device 2 and aiming at the center of the light source;
- (6)
- Substitute the corresponding parameters of each group and the position information from PSD into the mathematical model, and calculated the coordinate of the explosion point .
4.4. Validation Experiment for the Error Distribution in the Detection Area
- (1)
- Set up the two devices and the RTK base station and use a level to control the pitch angle and roll angle of the devices to zero, then adjust the two devices so that they are always aimed at the same point on the pole of the RTK base station to achieve optical axis intersection;
- (2)
- Use RTK to measure the length of and and the baseline, then calculate the azimuth angle, keeping the position of the device constant to keep the system azimuth angle constant;
- (3)
- Place a light source anywhere in the detection area, measure the position of the light source by RTK, and record it as the actual coordinates of the simulated explosion point ;
- (4)
- Use the flash trigger to trigger the light source, use the PSD to detect the position information of the flash, and download the waveform file to the host computer through the acquisition module;
- (5)
- Repeat steps 3 and 4 to simulate the explosion point falling in different positions within the detection area by moving the position of the light source several times;
- (6)
- Substitute the parameters and the position information from the PSD of each group into the mathematical model and calculate the coordinate of the explosion point .
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Turan, E.; Speretta, S.; Gill, E. Autonomous navigation for deep space small satellites: Scientific and technological advances. Acta Astronaut. 2022, 193, 56–74. [Google Scholar] [CrossRef]
- Wu, F.; Duan, J.; Chen, S.; Ye, Y.; Ai, P.; Yang, Z. Multi-Target Recognition of Bananas and Automatic Positioning for the Inflorescence Axis Cutting Point. Front. Plant Sci. 2021, 12, 705021. [Google Scholar] [CrossRef]
- Zekavat, S.R.; Buehrer, R.M.; Durgin, G.D.; Lovisolo, L.; Ghasemi, A. An Overview on Position Location: Past, Present, Future. Int. J. Wirel. Inf. Netw. 2021, 28, 45–76. [Google Scholar] [CrossRef]
- Jiang, S.; Zhao, C.; Zhu, Y.; Wang, C.; Du, Y. A Practical and Economical Ultra-wideband Base Station Placement Approach for Indoor Autonomous Driving Systems. J. Adv. Transp. 2022, 2022, 3815306. [Google Scholar] [CrossRef]
- Garcia, A.; Musallam, M.A.; Gaudilliere, V.; Ghorbel, E.; Ismaeil, K.A.; Perez, M.; Aouada, D. LSPnet: A 2D Localization-oriented Spacecraft Pose Estimation Neural Network. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021. [Google Scholar]
- Liu, X.; Wang, H.; Chen, X.; Chen, W.; Xie, Z. Position awareness network for noncooperative spacecraft pose estimation based on point cloud. IEEE Trans. Aerosp. Electron. Syst. 2022, 59, 507–518. [Google Scholar] [CrossRef]
- Calhoun, R.B.; Dunson, C.; Johnson, M.L.; Lamkin, S.R.; Lewis, W.R.; Showen, R.L.; Sompel, M.A.; Wollman, L.P. Precision and accuracy of acoustic gunshot location in an urban environment. arXiv 2021, arXiv:2108.07377. [Google Scholar]
- Wu, H.; Wu, P.-F.; Shi, Z.-S.; Sun, S.-Y.; Wu, Z.-H. An aerial ammunition ad hoc network collaborative localization algorithm based on relative ranging and velocity measurement in a highly-dynamic topographic structure. Def. Technol. 2023, 25, 231–248. [Google Scholar] [CrossRef]
- Abiri, A.; Parsayan, A. The bullet shockwave-based real-time sniper sound source localization. IEEE Sens. J. 2020, 20, 7253–7264. [Google Scholar] [CrossRef]
- Zhang, H.; Jin, L.; Ye, C. An RGB-D camera based visual positioning system for assistive navigation by a robotic navigation aid. IEEE/CAA J. Autom. Sin. 2021, 8, 1389–1400. [Google Scholar] [CrossRef]
- Guan, W.; Huang, L.; Wen, S.; Yan, Z.; Liang, W.; Yang, C.; Liu, Z. Robot localization and navigation using visible light positioning and SLAM fusion. J. Light. Technol. 2021, 39, 7040–7051. [Google Scholar] [CrossRef]
- Ye, H.; Peng, J. Robot Indoor Positioning and Navigation Based on Improved WiFi Location Fingerprint Positioning Algorithm. Wirel. Commun. Mob. Comput. 2022, 2022, 8274455. [Google Scholar] [CrossRef]
- Dai, Y. Research on Robot Positioning and Navigation Algorithm Based on SLAM. Wirel. Commun. Mob. Comput. 2022, 2022, 3340529. [Google Scholar] [CrossRef]
- Wang, C.; Xing, L.; Tu, X. A Novel Position and Orientation Sensor for Indoor Navigation Based on Linear CCDs. Sensors 2020, 20, 748. [Google Scholar] [CrossRef]
- Xu, Y.; Cai, Z.; Wu, W.; Zhao, P.; Qiao, Z. Current research and development of ammunition damage effect assessment technology. Trans. Beijing Inst. Technol. 2021, 41, 569–578. [Google Scholar]
- Xin, X.; Zelin, W.; Gengchen, S.; Zhou, J. A Location Method for Exploding Object at Low-Altitude Based on Computer Vision. In Proceedings of the International Conference on Computer Technology and Development, 3rd (ICCTD 2011), Chengdu, China, 25–27 November 2021; ASME Press: New York, NY, USA, 2011; Volume 1. [Google Scholar]
- Xin, W.; Dengchao, F.; Jie, Z.; Fangfang, Y. Research on Explosion Points Location of Remote Target-Scoring Systems Based on McWiLL and RS-485 Networks. In Proceedings of the 2014 Sixth International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2014; pp. 360–363. [Google Scholar]
- Zhou, Y.; Cao, R.; Li, P. A target spatial location method for fuze detonation point based on deep learning and sensor fusion. Expert Syst. Appl. 2024, 238, 122176. [Google Scholar] [CrossRef]
- Zhang, X.; Li, H. Calculation model of projectile explosion position by using acousto-optic combination mechanism. IEEE Access 2021, 9, 126058–126064. [Google Scholar] [CrossRef]
- Cao, J.; Li, H.; Zhang, X. Calculation model and uncertainty analysis of projectile explosion position based on acousto-optic compound detection. Optik 2022, 253, 168622. [Google Scholar] [CrossRef]
- Li, H.; Zhang, X. Projectile explosion position parameters data fusion calculation and measurement method based on distributed multi-acoustic sensor arrays. IEEE Access 2022, 10, 6099–6108. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, X.; Zhang, C.; He, G.; Chen, X.; Qiao, Q.; Zang, J.; Dou, W.; Sun, P.; Deng, Y. Ga2O3-based solar-blind position-sensitive detector for noncontact measurement and optoelectronic demodulation. Nano Lett. 2022, 22, 4888–4896. [Google Scholar] [CrossRef]
- Wang, W.; Lu, J.; Ni, Z. Position-sensitive detectors based on two-dimensional materials. Nano Res. 2021, 14, 1889–1900. [Google Scholar] [CrossRef]
- Liu, K.; Wang, W.; Yu, Y.; Hou, X.; Liu, Y.; Chen, W.; Wang, X.; Lu, J.; Ni, Z. Graphene-based infrared position-sensitive detector for precise measurements and high-speed trajectory tracking. Nano Lett. 2019, 19, 8132–8137. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Liu, K.; Jiang, J.; Du, R.; Sun, L.; Chen, W.; Lu, J.; Ni, Z. Ultrasensitive graphene-Si position-sensitive detector for motion tracking. InfoMat 2020, 2, 761–768. [Google Scholar] [CrossRef]
- Liu, K.; Wan, D.; Wang, W.; Fei, C.; Zhou, T.; Guo, D.; Bai, L.; Li, Y.; Ni, Z.; Lu, J. A Time-Division Position-Sensitive Detector Image System for High-Speed Multitarget Trajectory Tracking. Adv. Mater. 2022, 34, 2206638. [Google Scholar] [CrossRef] [PubMed]
- Chien, M.-H.; Steurer, J.; Sadeghi, P.; Cazier, N.; Schmid, S. Nanoelectromechanical position-sensitive detector with picometer resolution. ACS Photonics 2020, 7, 2197–2203. [Google Scholar] [CrossRef]
- Hu, C.; Wang, X.; Song, B. High-performance position-sensitive detector based on the lateral photoelectrical effect of two-dimensional materials. Light Sci. Appl. 2020, 9, 88. [Google Scholar] [CrossRef]
- Foisal, A.R.M.; Nguyen, T.; Dinh, T.; Nguyen, T.K.; Tanner, P.; Streed, E.W.; Dao, D.V. 3C-SiC/Si heterostructure: An excellent platform for position-sensitive detectors based on photovoltaic effect. ACS Appl. Mater. Interfaces 2019, 11, 40980–40987. [Google Scholar] [CrossRef] [PubMed]
- Lu, X.; Zhou, Y.; Qiao, J.; Luan, Y.; Wang, Y. Research on the influence of background light on the accuracy of a three-dimensional coordinate measurement system based on dual-PSD. Eng. Comput. 2021, 38, 242–265. [Google Scholar] [CrossRef]
- Chiang, C.-T.; Huang, L.-C. A CMOS Auto-High Background Immunity Position-Sensitive Detector (PSD) for High Background Light Environment. In Proceedings of the 2022 IEEE International Conference on Mechatronics and Automation (ICMA), Guilin, China, 7–10 August 2022; pp. 1086–1090. [Google Scholar]
- Qu, L.; Liu, J.; Deng, Y.; Xu, L.; Hu, K.; Yang, W.; Jin, L.; Cheng, X. Analysis and Adjustment of Positioning Error of PSD System for Mobile SOF-FTIR. Sensors 2019, 19, 5081. [Google Scholar] [CrossRef]
- Han, R.; Yan, H.; Ma, L. Research on 3D Reconstruction methods Based on Binocular Structured Light Vision. J. Phys. Conf. Ser. 2021, 1744, 032002. [Google Scholar] [CrossRef]
- Lin, D.; Wang, Z.; Shi, H.; Chen, H. Modeling and analysis of pixel quantization error of binocular vision system with unequal focal length. J. Phys. Conf. Ser. 2021, 1738, 012033. [Google Scholar] [CrossRef]
- Lu, Y.; Liu, W.; Zhang, Y.; Li, J.; Luo, W.; Zhang, Y.; Xing, H.; Zhang, L. An error analysis and optimization method for combined measurement with binocular vision. Chin. J. Aeronaut. 2021, 34, 282–292. [Google Scholar] [CrossRef]
- Cheng, J.; Jiang, H.; Wang, D.; Zheng, W.; Shen, Y.; Wu, M. Analysis of Position Measurement Accuracy of Boom-Type Roadheader Based on Binocular Vision. IEEE Trans. Instrum. Meas. 2024, 73, 5016712. [Google Scholar] [CrossRef]
- Cheng, S.; Liu, J.; Li, Z.; Zhang, P.; Chen, J.; Yang, H. 3D error calibration of spatial spots based on dual position-sensitive detectors. Appl. Opt. 2023, 62, 933–943. [Google Scholar] [CrossRef] [PubMed]
- Sha, O.; Zhang, H.; Bai, J.; Zhang, Y.; Yang, J. The analysis of the structural parameter influences on measurement errors in a binocular 3D reconstruction system: A portable 3D system. PeerJ Comput. Sci. 2023, 9, e1610. [Google Scholar] [CrossRef] [PubMed]
- Weng, J.; Zhou, W.; Ma, S.; Qi, P.; Zhong, J. Model-Free Lens Distortion Correction Based on Phase Analysis of Fringe-Patterns. Sensors 2021, 21, 209. [Google Scholar] [CrossRef] [PubMed]
- Liu, G.; Cai, Y.; Chen, D.; Wang, X. Distance Estimation for Precise Object Recognition Considering Geometric Distortion of Wide-angle Lens. Infrared Technol. 2021, 43, 1158–1165. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instrumentation | Provider | Type No. | Main Parameters | |
|---|---|---|---|---|
| PSD | HAMAMATSU, Shizuoka, Japan | C10443-03 | Spectral response range | 320–1060 nm |
| Photosensitivity | −60 mV/μW | |||
| Position detection error | ±150 μm | |||
| Position resolution | 1.4 μm | |||
| Acquisition | TDEC, Chengdu, China | iSD-404 W | Sampling frequency | Max: 2 MHz |
| RTK | HI-TARGET, Guangzhou, China | V200 | Positioning accuracy | Plane: ±8 mm |
| Altitude: ±15 mm | ||||
| Lens | Nikon, Kanagawa, Japan | AF 50 mm f/1.8 D | Focal length | 50 mm |
| Distortion rate | 0.438% | |||
| Device 1 | Device 2 | Test Error | |
|---|---|---|---|
| (°) | (°) | (mm) | |
| 1 | 10.5752 | 10.5638 | 57.82 |
| 2 | 27.551 | 20.3861 | 56.54 |
| 3 | 14.8183 | 25.9639 | 57.58 |
| 4 | 38.4242 | 26.4696 | 52.65 |
| 5 | 46.9864 | 22.2296 | 55.02 |
| 6 | 77.1736 | 29.0752 | 61.08 |
| 7 | 82.0404 | 22.7545 | 59.42 |
| 8 | 70.1285 | 40.7945 | 61.22 |
| 9 | 73.008 | 45.7415 | 87.31 |
| 10 | 77.9635 | 51.8593 | 123.73 |
| 11 | 70.0748 | 70.9365 | 229.48 |
| 12 | 71.2491 | 62.4419 | 152.03 |
| 13 | 65.5684 | 82.7093 | 66.74 |
| 14 | 85.9585 | 72.8724 | 415.12 |
| 15 | 48.7588 | 65.5269 | 83.70 |
| 16 | 42.0829 | 73.8213 | 83.32 |
| 17 | 33.4197 | 77.0674 | 86.91 |
| 18 | 25.571 | 68.0733 | 63.67 |
| 19 | 22.6404 | 78.834 | 69.89 |
| 20 | 17.6403 | 67.2202 | 63.08 |
| 21 | 22.8052 | 40.2695 | 61.93 |
| 22 | 8.5798 | 48.2914 | 59.21 |
| 23 | 44.9984 | 45.3498 | 58.51 |
| 24 | 34.316 | 45.4239 | 50.17 |
| 25 | 45.23 | 54.2921 | 63.97 |
| 26 | 45.8272 | 36.5607 | 64.04 |
| 27 | 53.0134 | 47.4595 | 68.36 |
| 28 | 53.841 | 55.338 | 77.98 |
| 29 | 36.318 | 54.7984 | 62.61 |
| 30 | 48.1295 | 34.3691 | 50.52 |
| Device 1 | Device 2 | Test Error | |
|---|---|---|---|
| (°) | (°) | (mm) | |
| 1 | −0.303 | 3.219 | 48.02 |
| 2 | 2.719 | 49.31 | |
| 3 | 2.473 | 41.99 | |
| 4 | 2.253 | 47.87 | |
| 5 | 2.077 | 45.66 | |
| 6 | 1.829 | 42.96 | |
| 7 | 1.706 | 45.74 | |
| 8 | 1.277 | 41.79 | |
| 9 | 0.825 | 42.11 | |
| 10 | 0.615 | 41.18 | |
| 11 | 0.396 | 39.09 | |
| 12 | 0.253 | 38.35 | |
| 13 | 0.026 | 38.46 | |
| 14 | −0.19 | 38.80 | |
| 15 | −0.405 | 40.64 | |
| 16 | −0.622 | 40.94 | |
| 17 | −0.834 | 39.26 | |
| 18 | −1.256 | 41.75 | |
| 19 | −1.586 | 43.88 | |
| 20 | −1.806 | 42.21 | |
| 21 | −2.103 | 44.74 | |
| 22 | −2.43 | 40.03 | |
| 23 | −2.812 | 48.83 | |
| 24 | −3.168 | 44.83 |
| Actual Coordinates | System Testing Coordinates | Test Error | |||||
|---|---|---|---|---|---|---|---|
| (m) | (m) | (m) | (m) | (m) | (m) | (mm) | |
| 1 | 0.4122 | 0.0261 | −0.8835 | 0.3734 | 0.0292 | −0.922 | 54.66 |
| 2 | −0.3057 | 0.0594 | −0.9778 | −0.3725 | 0.0502 | −1.0144 | 76.17 |
| 3 | −0.3521 | 0.0812 | −0.5492 | −0.4154 | 0.0446 | −0.5988 | 80.42 |
| 4 | 0.0689 | 0.0895 | −0.3879 | 0.0141 | 0.0387 | −0.4417 | 76.80 |
| 5 | 0.9894 | 0.0601 | −0.1365 | 0.9423 | 0.0225 | −0.2025 | 81.08 |
| 6 | −0.6032 | 0.0968 | −0.0027 | −0.6595 | 0.0612 | −0.0467 | 71.45 |
| 7 | 0.2444 | 0.0995 | 0.7931 | 0.1837 | 0.0486 | 0.7258 | 90.63 |
| 8 | −0.2382 | 0.1174 | 1.4077 | −0.3191 | 0.0653 | 1.3589 | 94.48 |
| 9 | 0.9704 | 0.2196 | 0.7209 | 0.9211 | 0.0276 | 0.7833 | 79.53 |
| 10 | −0.2784 | 0.1054 | 1.3009 | −0.3649 | 0.0613 | 1.2588 | 96.20 |
| 11 | −0.0881 | 0.1362 | 0.3828 | −0.1567 | 0.0583 | 0.35 | 76.04 |
| 12 | −0.4580 | 0.0902 | 0.0032 | −0.5176 | 0.0634 | −0.041 | 74.20 |
| 13 | 0.5562 | 0.0906 | −0.0315 | 0.4919 | 0.0438 | −0.0766 | 78.54 |
| 14 | −0.7899 | 0.2216 | −0.7133 | −0.8565 | 0.0658 | −0.6785 | 75.14 |
| 15 | 0.6855 | 0.1832 | −1.2314 | 0.6347 | 0.0247 | −1.1874 | 67.21 |
| 16 | −0.0681 | 0.0889 | −1.6852 | −0.1297 | 0.0427 | −1.7136 | 67.83 |
| 17 | −0.7443 | 0.0699 | −1.5101 | −0.7227 | 0.0552 | −1.451 | 62.92 |
| 18 | 1.2282 | 0.0820 | 0.6127 | 1.2726 | 0.0276 | 0.554 | 73.60 |
| 19 | −0.3776 | 0.0955 | 1.5875 | −0.452 | 0.0646 | 1.5213 | 99.59 |
| 20 | −0.0973 | 0.2384 | 0.2896 | −0.0448 | 0.0542 | 0.211 | 94.52 |
| 21 | 0.2198 | 0.1075 | 0.0094 | 0.1499 | 0.0466 | −0.0282 | 79.37 |
| 22 | −0.6263 | 0.1119 | −0.3614 | −0.698 | 0.0539 | −0.3953 | 79.31 |
| 23 | −0.9908 | 0.0902 | −0.2139 | −1.0521 | 0.0767 | −0.2751 | 86.62 |
| 24 | 0.7754 | 0.0760 | −0.5872 | 0.7098 | 0.0335 | −0.6446 | 87.17 |
| 25 | −0.4547 | 0.1291 | 0.3808 | −0.5152 | 0.0663 | 0.3314 | 78.11 |
| 26 | 1.7395 | 0.2155 | 0.989 | 1.6769 | 0.0395 | 0.9142 | 97.54 |
| 27 | 1.2886 | 0.0489 | 1.3997 | 1.362 | 0.0519 | 1.4647 | 98.04 |
| 28 | 1.3411 | 0.0977 | −1.6641 | 1.3015 | 0.0229 | −1.709 | 59.87 |
| 29 | −1.4613 | 0.1287 | 0.6915 | −1.4109 | 0.0437 | 0.6255 | 83.04 |
| 30 | −1.8117 | 0.2981 | −1.329 | −1.8549 | 0.0262 | −1.2753 | 68.92 |
| System Structure Parameters | The Azimuth Angle | The Pitch Angle | Position of the Intersection |
|---|---|---|---|
| Error propagation coefficient | ≤48.80 | ≤44.82 | ≤44.78 |
| Test error | 56.17 mm | 41.87 mm | 73.38 mm |
| Optimization | Control the azimuth angle within 20°–50° | Control the azimuth angle within −2.5°–2.5° | half-axis of the Zw-axis of the world coordinate system |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, H.; Chu, W.; Zhang, B.; Zhao, D. Error Analysis and Optimization of Structural Parameters of Spatial Coordinate Testing System Based on Position-Sensitive Detector. Sensors 2024, 24, 5740. https://doi.org/10.3390/s24175740
Lu H, Chu W, Zhang B, Zhao D. Error Analysis and Optimization of Structural Parameters of Spatial Coordinate Testing System Based on Position-Sensitive Detector. Sensors. 2024; 24(17):5740. https://doi.org/10.3390/s24175740
Chicago/Turabian StyleLu, Haozhan, Wenbo Chu, Bin Zhang, and Donge Zhao. 2024. "Error Analysis and Optimization of Structural Parameters of Spatial Coordinate Testing System Based on Position-Sensitive Detector" Sensors 24, no. 17: 5740. https://doi.org/10.3390/s24175740