
KISS—Keep It Static SLAMMOT—The Cost of Integrating Moving Object Tracking into an EKF-SLAM Algorithm

Abstract
1. Introduction
1.1. Background
1.2. Related Literature
1.3. Contributions
- An algorithmic integration of dynamic landmarks into the EKF-SLAM algorithm, which includes the estimation of unobserved states and is named Keep it Static SLAMMOT (KISS).
- A detailed investigation of metrics that represent the quality of the map and robot track.
- A new safety-relevant metric for SLAMMOT, which we refer to as safety–distance–error (SDE).
- Proposals for researchers on handling potentially dynamic landmarks.
1.4. Structure
2. Materials and Methods
2.1. Notation
2.2. The Generalized EKF-SLAM Algorithm
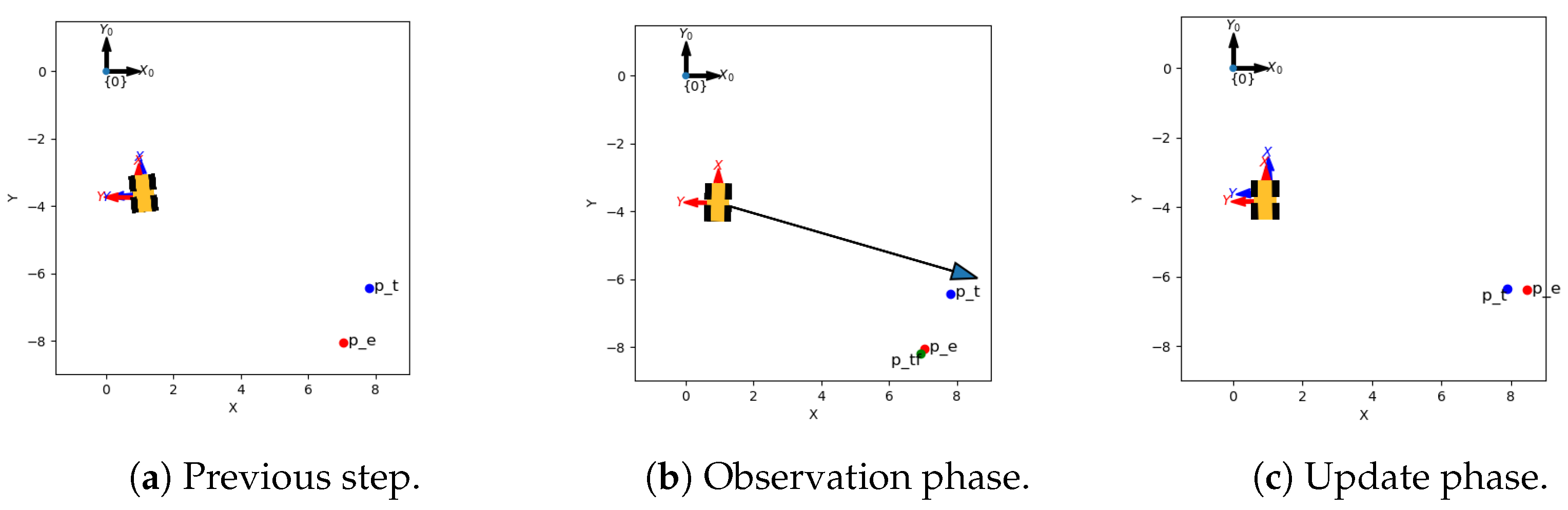
2.2.1. Prediction Phase
2.2.2. Update Phase
2.3. Extension to Dynamic Landmarks
- A static linear motion model, which models noise as the only source of motion and assumes independence between the two motion plane dimensions, Appendix B.1
- A linear kinematic motion model, which models linearly independent velocity as the source of motion and assumes independence between the two motion plane dimensions; Appendix B.2
- A nonlinear kinematic motion model, specifically a bicycle model, is used to model the changes between the two motion plane dimensions through changes in velocity and angle as detailed in Appendix B.3
2.4. Experiments
2.5. Evaluation
2.5.1. DATMO
2.5.2. Experiments
- What happens when a dynamic landmark is estimated as static, further referred to as a false negative?
- What happens when a static landmark is estimated as dynamic, further referred to as a false positive?
- What happens to overall metrics when dynamic landmarks are included inside the algorithm?
2.5.3. Metrics
3. Results
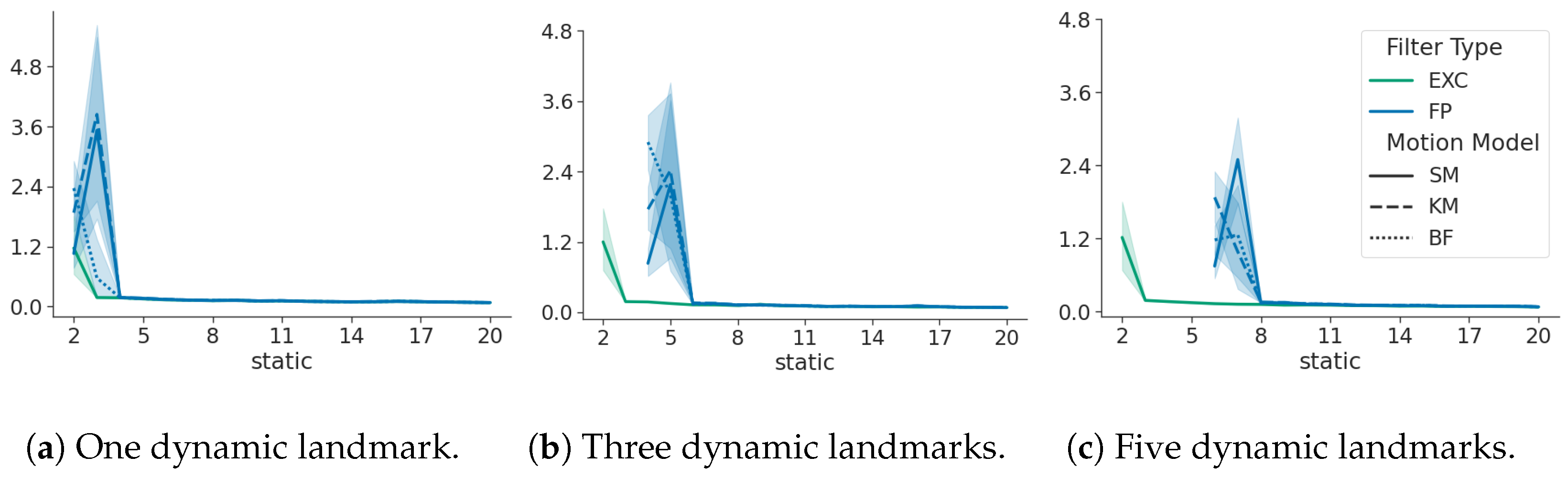
- The exclusive filter—abbreviated as EXC in the figures and colored green—excludes dynamic landmarks.
- The inclusive filter—abbreviated as INC in the figures and colored orange—models dynamic landmarks as static.
- The false positive filter—abbreviated as FP in the figures and colored blue—models static landmarks as dynamic.
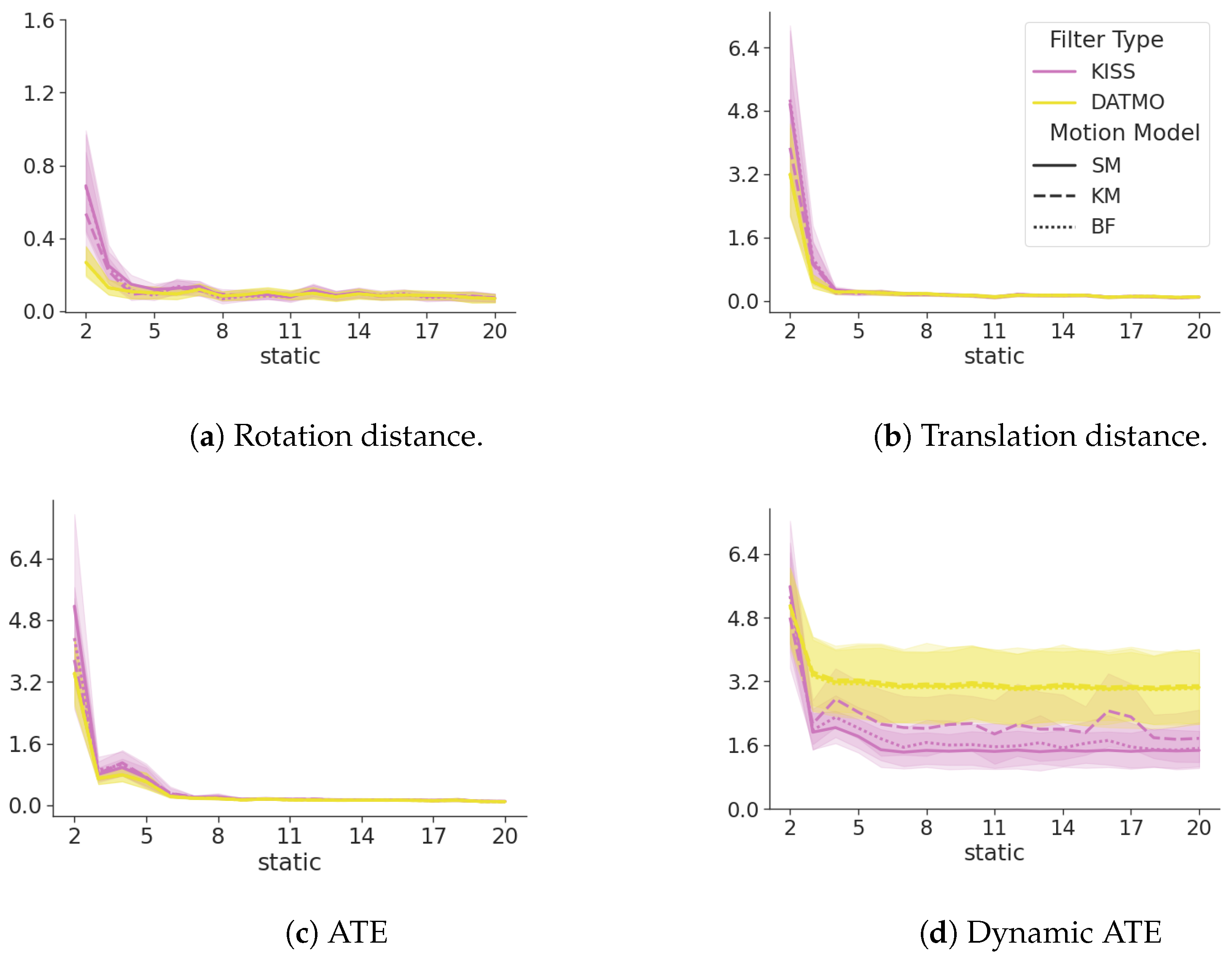
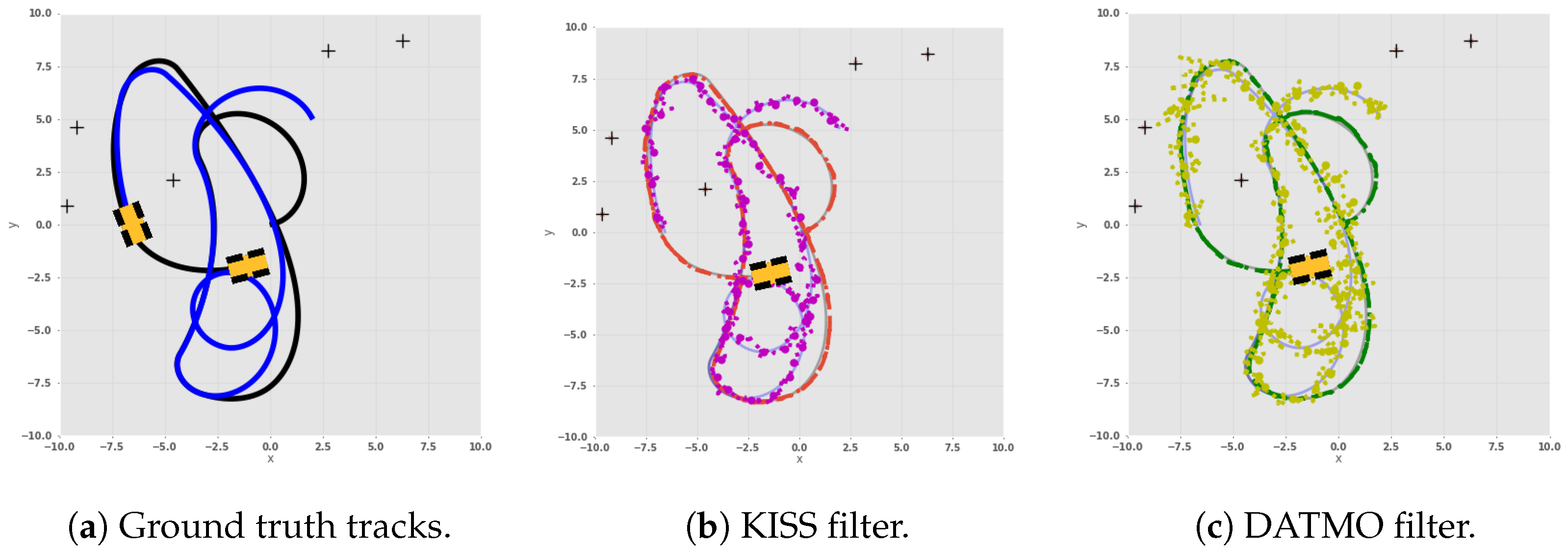
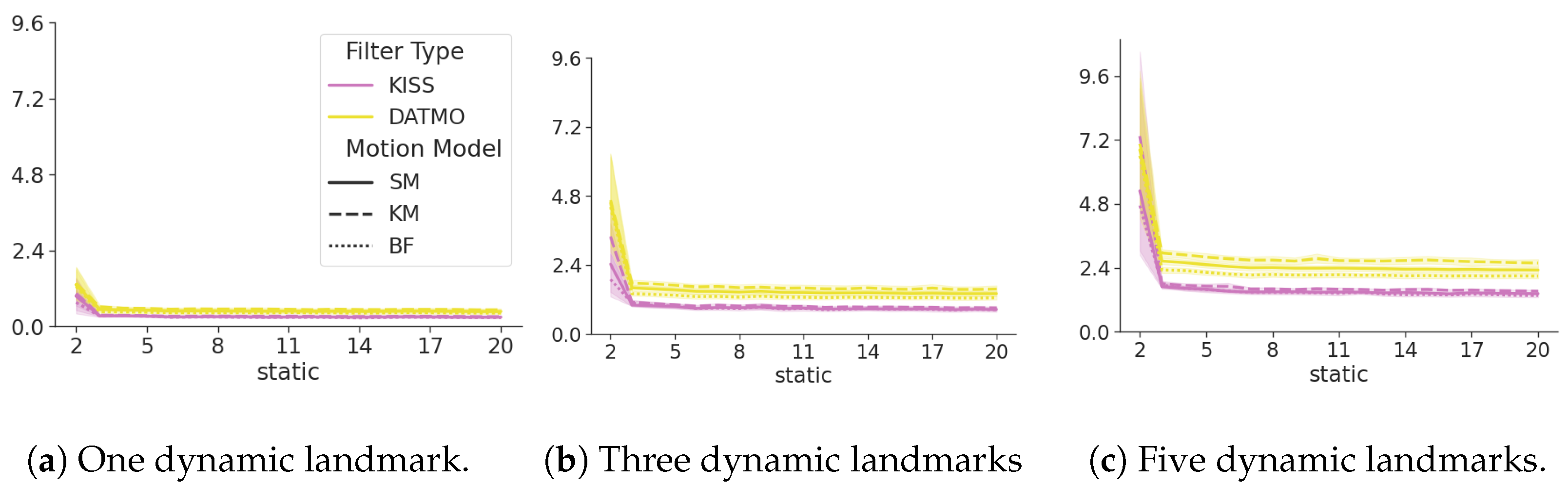
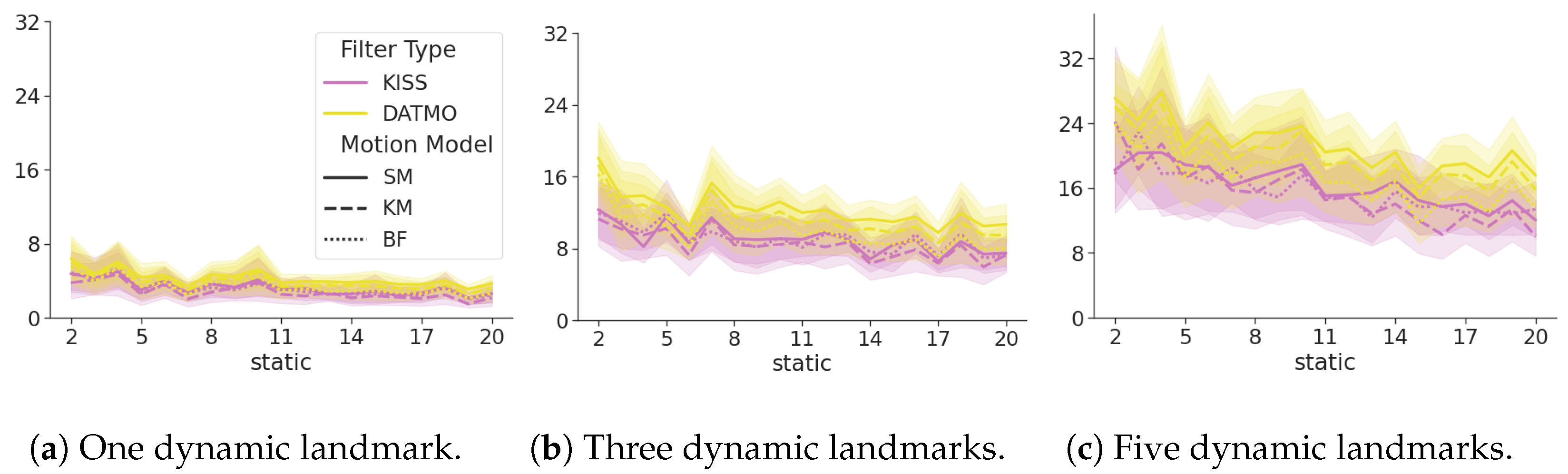
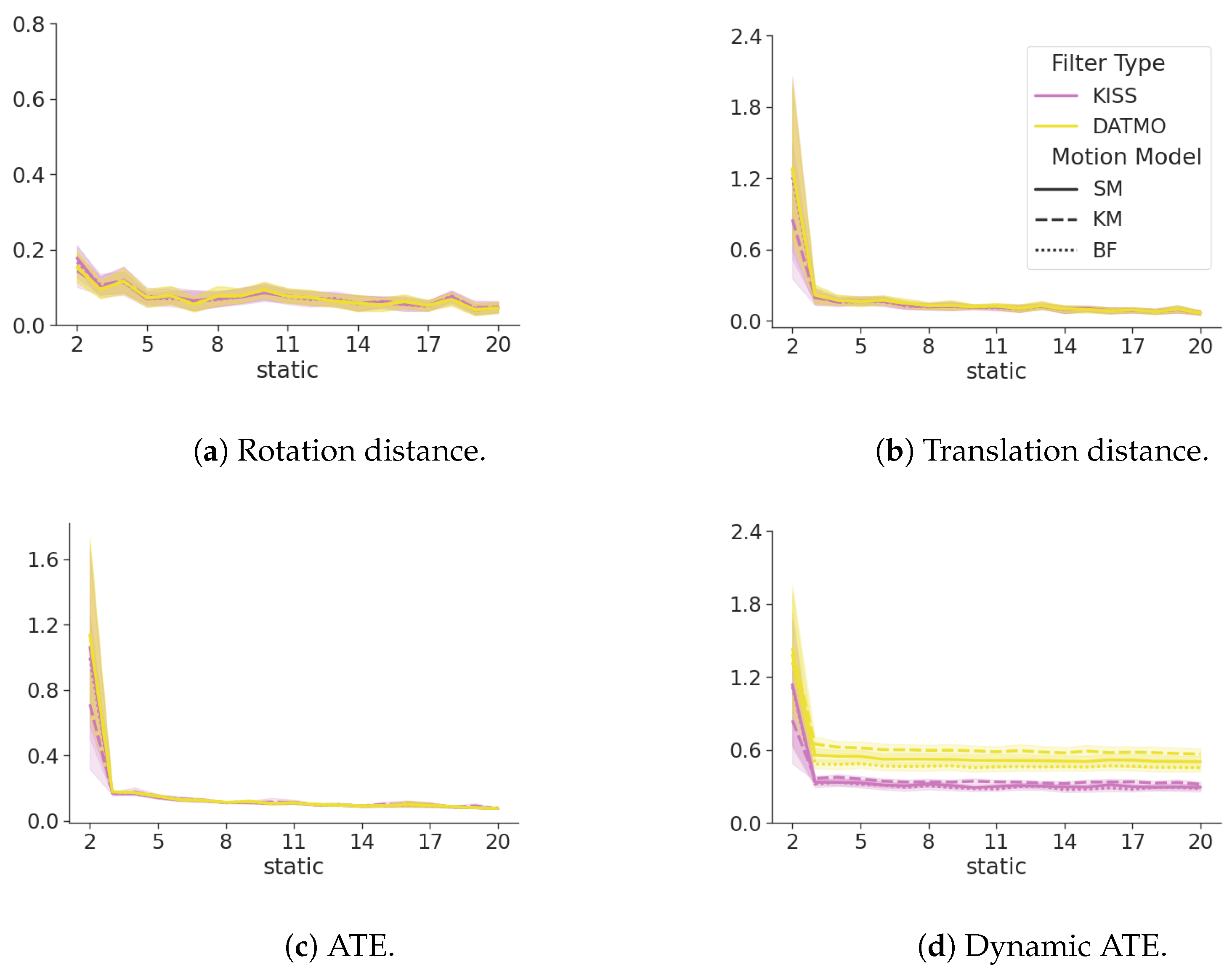
- The DATMO implementation presented in Section 2.5.1—abbreviated as DATMO in the figures and colored yellow—separates SLAM and MOT.
- The KISS implementation—abbreviated as KISS in the figures and colored magenta—includes dynamic landmarks in the state estimation.
3.1. False Negatives
3.2. False Positives
3.3. Tracking Dynamic Objects
3.4. SDE
3.5. Occlusions
3.6. Changing Velocity
3.7. Uncertainty
4. Discussion
5. Conclusions
Recommendations for SLAM Researchers
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| EKF | extended Kalman filter |
| SLAM | simultaneous localization and mapping |
| SfM | structure-from-motion |
| MOT | moving object tracking |
| KISS | Keep it Static SLAMMOT |
| DATMO | detection and tracking of moving objects |
| ATE | absolute trajectory error |
| SDE | safety distance error |
Appendix A. EKF Equations
Appendix A.1. Vehicle Model and Jacobians
Appendix A.2. Update Step
Appendix B. Motion Models
Appendix B.1. Constant Position Linear Model
- and are the predicted states for the next time step.
- and are the current state estimates.
- and are the process noise terms for the x and y coordinates.
Appendix B.2. Constant Velocity Linear Model
- , , , and are the predicted state variables (position and velocity) of the next time step.
- , , , and are the estimated state variables at the current time step.
- is the time difference between k and .
- and are the process noise terms for the velocity components. There is no noise for the position; all motion is assumed to occur through velocity.
Appendix B.3. Constant Velocity Nonlinear Model
Appendix C. Observation Models
Appendix D. Occlusions
References
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef]
- Saputra, M.R.U.; Markham, A.; Trigoni, N. Visual SLAM and Structure from Motion in Dynamic Environments: A Survey. ACM Comput. Surv. 2018, 51, 1–36. [Google Scholar] [CrossRef]
- Wang, C.C. Simultaneous Localization, Mapping and Moving Object Tracking. Ph.D. Thesis, Carnegie Mellon University, Pittsburgh, PA, USA, 2004. [Google Scholar]
- Boulahbal, H.E.; Voicila, A.; Comport, A.I. Instance-Aware Multi-Object Self-Supervision for Monocular Depth Prediction. IEEE Robot. Autom. Lett. 2022, 7, 10962–10968. [Google Scholar] [CrossRef]
- Barfoot, T.D. State Estimation for Robotics; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar] [CrossRef]
- Fenwick, J.W. Collaborative Concurrent Mapping and Localization. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2001. [Google Scholar]
- Corke, P. Localization and Mapping. In Robotics, Vision and Control: Fundamental Algorithms in Python; Corke, P., Ed.; Springer Tracts in Advanced Robotics; Springer International Publishing: Cham, Switzerland, 2023; pp. 205–250. [Google Scholar] [CrossRef]
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef]
- Khan, A.; Xie, W.; Zhang, B.; Liu, L.W. A survey of interval observers design methods and implementation for uncertain systems. J. Frankl. Inst. 2021, 358, 3077–3126. [Google Scholar] [CrossRef]
- Rauf, A.; Rehman, A.u.; Khan, A.; Abbasi, W.; Ullah, K. Adaptive control of robotic manipulator with input deadzone and disturbances/uncertainties. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2024, 238, 8330–8338. [Google Scholar] [CrossRef]
- Solà, J. Towards Visual Localization, Mapping and Moving Objects Tracking by a Mobile Robot: A Geometric and Probabilistic Approach. Ph.D. Thesis, Institut National Polytechnique de Toulouse (INPT), Toulouse, France, 2007. [Google Scholar]
- Augenstein, S.; Rock, S.M. Improved frame-to-frame pose tracking during vision-only SLAM/SFM with a tumbling target. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3131–3138. [Google Scholar] [CrossRef]
- Skinner, J.R. Simulation for Robot Vision. Ph.D. Thesis, Queensland University of Technology, Brisbane, Australia, 2022. [Google Scholar]
- Thrun, S. Probabilistic robotics. In Intelligent Robotics and Autonomous Agents; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Rosinol, A.; Violette, A.; Abate, M.; Hughes, N.; Chang, Y.; Shi, J.; Gupta, A.; Carlone, L. Kimera: From SLAM to Spatial Perception with 3D Dynamic Scene Graphs. arXiv 2021, arXiv:2101.06894. [Google Scholar] [CrossRef]
- Li, R.; Liu, D. Decomposition Betters Tracking Everything Everywhere. arXiv 2024, arXiv:2407.06531. [Google Scholar] [CrossRef]
- Lamarca, J.; Parashar, S.; Bartoli, A.; Montiel, J.M.M. DefSLAM: Tracking and Mapping of Deforming Scenes from Monocular Sequences. arXiv 2020, arXiv:1908.08918. [Google Scholar] [CrossRef]
- Qiu, Y.; Wang, C.; Wang, W.; Henein, M.; Scherer, S. AirDOS: Dynamic SLAM benefits from Articulated Objects. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 8047–8053. [Google Scholar] [CrossRef]
- Henein, M.; Zhang, J.; Mahony, R.; Ila, V. Dynamic SLAM: The Need for Speed. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May 2020; pp. 2123–2129. [Google Scholar] [CrossRef]
- Henning, D.F.; Laidlow, T.; Leutenegger, S. BodySLAM: Joint Camera Localisation, Mapping, and Human Motion Tracking. In Computer Vision—ECCV 2022, Proceedings of the 17th European Conference, Tel Aviv, Israel, 23–27 October 2022; Avidan, S., Brostow, G., Cissé, M., Farinella, G.M., Hassner, T., Eds.; Springer: Cham, Switzerland, 2022; pp. 656–673. [Google Scholar] [CrossRef]
- Henning, D.F.; Choi, C.; Schaefer, S.; Leutenegger, S. BodySLAM++: Fast and Tightly-Coupled Visual-Inertial Camera and Human Motion Tracking. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 3781–3788. [Google Scholar] [CrossRef]
- Llamazares, Á.; Molinos, E.J.; Ocaña, M. Detection and Tracking of Moving Obstacles (DATMO): A Review. Robotica 2020, 38, 761–774. [Google Scholar] [CrossRef]
- Corke, P.; Haviland, J. Not your grandmother’s toolbox–the Robotics Toolbox reinvented for Python. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 11357–11363. [Google Scholar]
- Mineault, P. The Good Research Code Handbook Community. In The Good Research Code Handbook; Zenodo: Geneva, Switzerland, 2021. [Google Scholar] [CrossRef]
- Yadan, O. Hydra—A Framework for Elegantly Configuring Complex Applications. 2019. Available online: https://hydra.cc/docs/intro/#citing-hydra (accessed on 1 September 2024).
- Neira, J.; Tardos, J. Data association in stochastic mapping using the joint compatibility test. IEEE Trans. Robot. Autom. 2001, 17, 890–897. [Google Scholar] [CrossRef]
- Arun, K.S.; Huang, T.S.; Blostein, S.D. Least-Squares Fitting of Two 3-D Point Sets. IEEE Trans. Pattern Analy. Machin. Intell. 1987, PAMI-9, 698–700. [Google Scholar] [CrossRef] [PubMed]
- Triggs, B.; McLauchlan, P.F.; Hartley, R.I.; Fitzgibbon, A.W. Bundle Adjustment—A Modern Synthesis. In Proceedings of the Vision Algorithms: Theory and Practice; Triggs, B., Zisserman, A., Szeliski, R., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2000; pp. 298–372. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dynamic Landmarks | 1 | 2 | 3 | 4 | 5 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Dynamic Model | Filter | Mean | std | Mean | std | Mean | std | Mean | std | Mean | std |
| BF | DATMO | 0.42802 | 0.07463 | 0.4244 | 0.07054 | 0.42383 | 0.06123 | 0.42031 | 0.0523 | 0.4208 | 0.04262 |
| KISS | 0.27766 | 0.06172 | 0.2763 | 0.05591 | 0.2863 | 0.05816 | 0.2792 | 0.04328 | 0.27931 | 0.03521 | |
| KM | DATMO | 0.52586 | 0.1088 | 0.53724 | 0.109 | 0.52225 | 0.08444 | 0.52417 | 0.06736 | 0.53813 | 0.06897 |
| KISS | 0.30936 | 0.04347 | 0.31145 | 0.03754 | 0.312 | 0.03804 | 0.31913 | 0.04925 | 0.3164 | 0.03525 | |
| SM | DATMO | 0.48162 | 0.09204 | 0.47692 | 0.09231 | 0.4746 | 0.07746 | 0.46957 | 0.06724 | 0.46934 | 0.05298 |
| KISS | 0.29757 | 0.04213 | 0.2938 | 0.04099 | 0.29051 | 0.03116 | 0.2951 | 0.03733 | 0.28976 | 0.02416 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mandel, N.; Kompe, N.; Gerwin, M.; Ernst, F. KISS—Keep It Static SLAMMOT—The Cost of Integrating Moving Object Tracking into an EKF-SLAM Algorithm. Sensors 2024, 24, 5764. https://doi.org/10.3390/s24175764
Mandel N, Kompe N, Gerwin M, Ernst F. KISS—Keep It Static SLAMMOT—The Cost of Integrating Moving Object Tracking into an EKF-SLAM Algorithm. Sensors. 2024; 24(17):5764. https://doi.org/10.3390/s24175764
Chicago/Turabian StyleMandel, Nicolas, Nils Kompe, Moritz Gerwin, and Floris Ernst. 2024. "KISS—Keep It Static SLAMMOT—The Cost of Integrating Moving Object Tracking into an EKF-SLAM Algorithm" Sensors 24, no. 17: 5764. https://doi.org/10.3390/s24175764
APA StyleMandel, N., Kompe, N., Gerwin, M., & Ernst, F. (2024). KISS—Keep It Static SLAMMOT—The Cost of Integrating Moving Object Tracking into an EKF-SLAM Algorithm. Sensors, 24(17), 5764. https://doi.org/10.3390/s24175764