

Page Turning Using Assistive Robot with Low-Degree-of-Freedom Hand

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Design Concept for a Foldable Robotic Hand
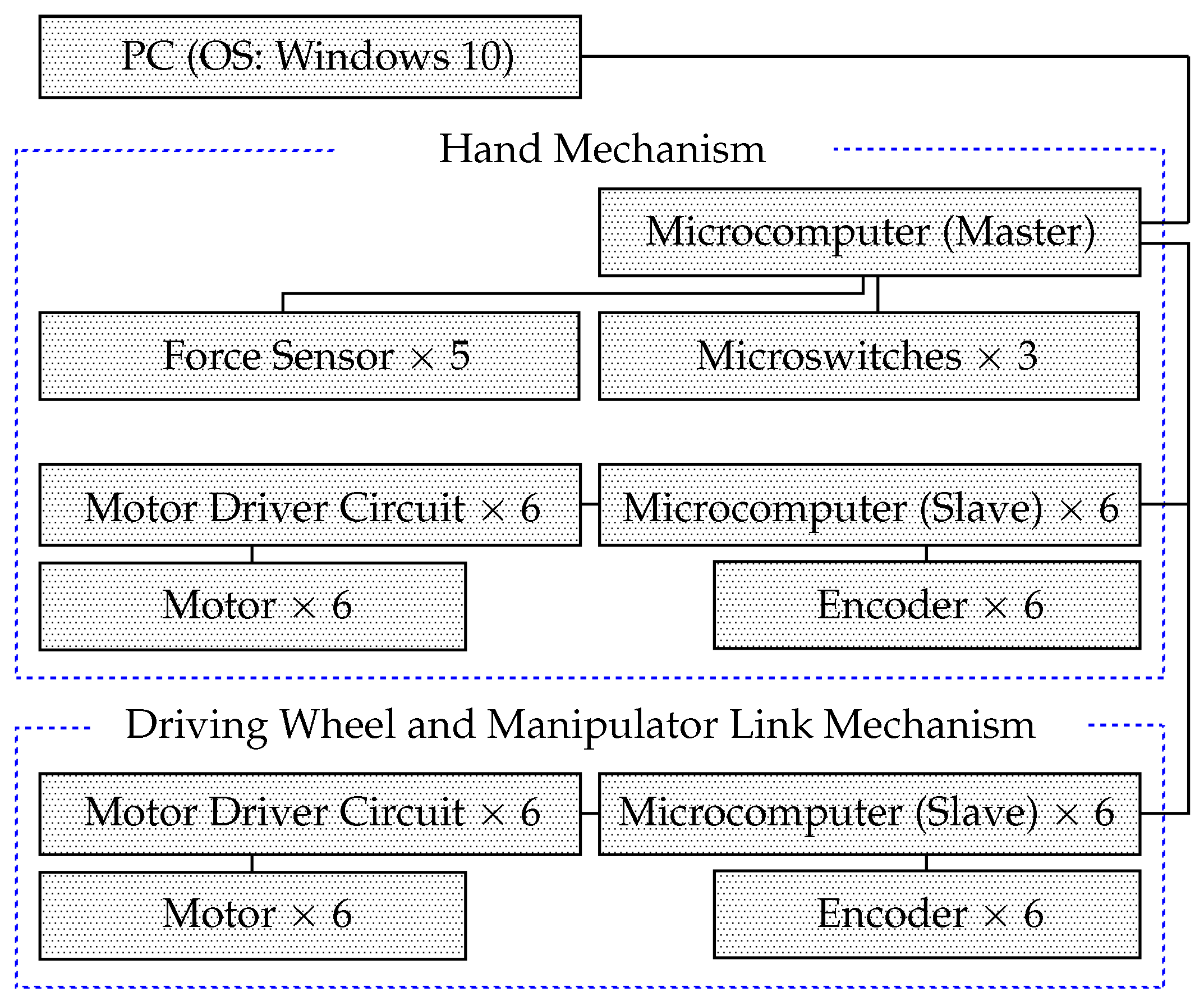
2.2. Mechanism of Robot and System Configuration
3. Results and Discussions
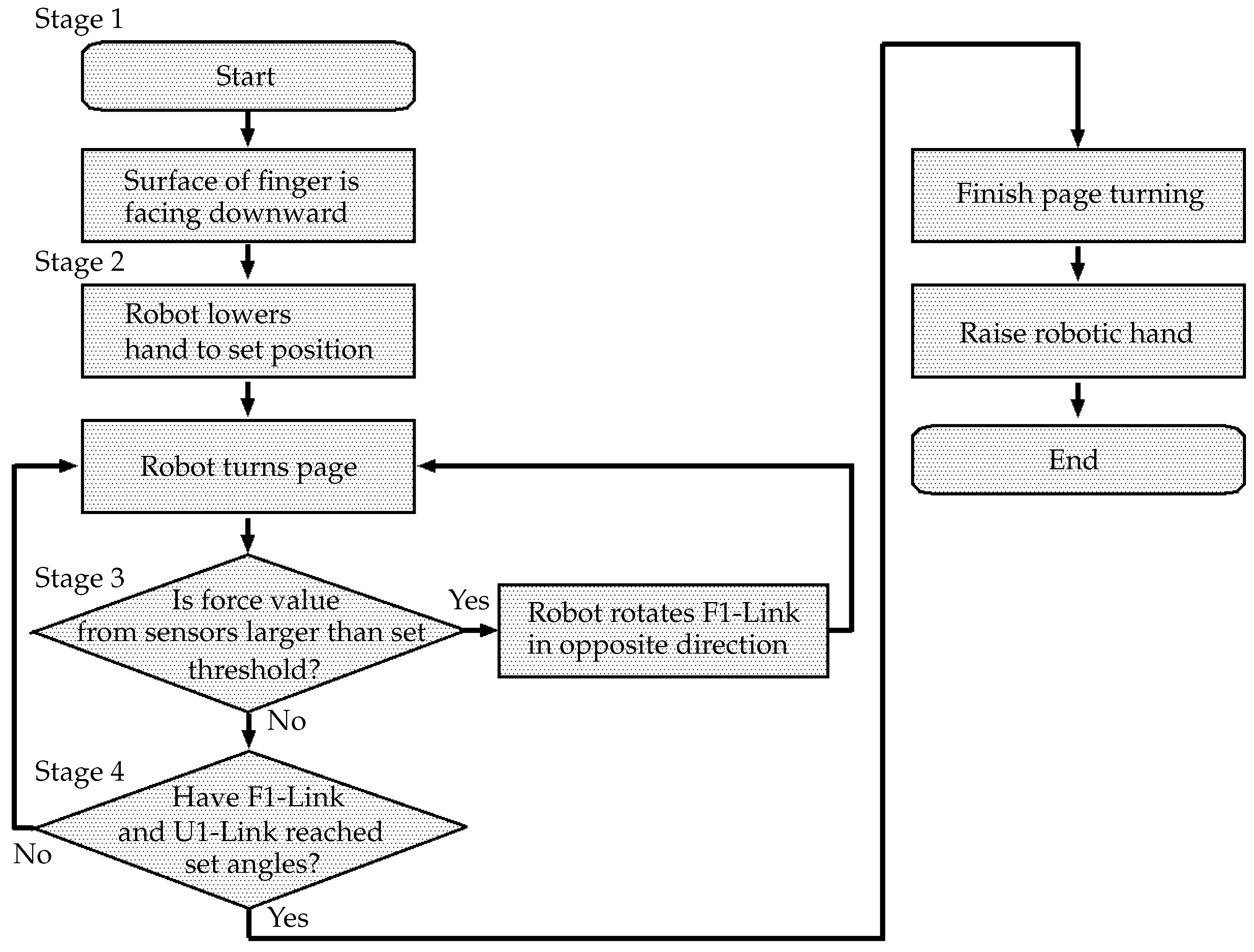
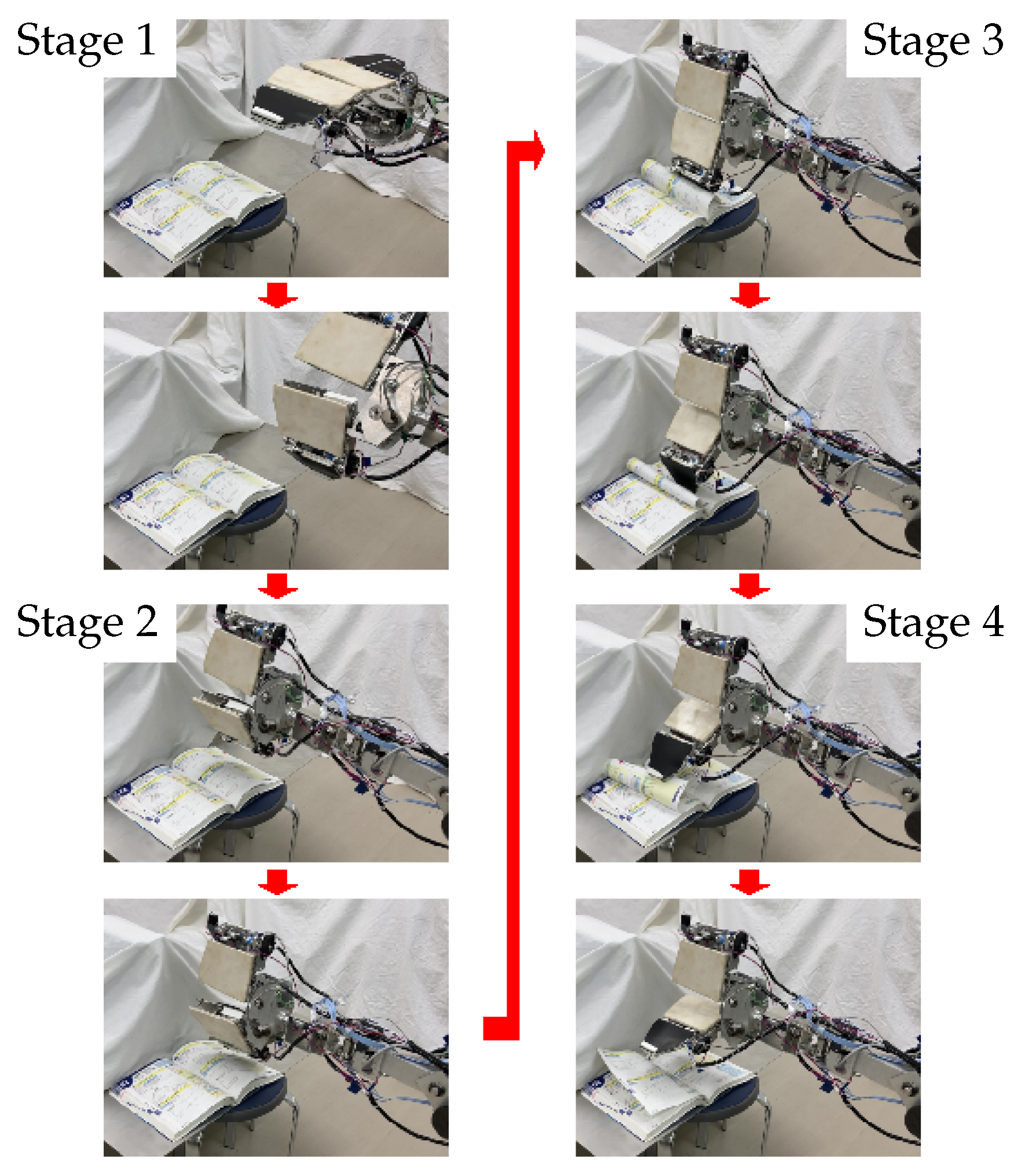
Strategy for Page Turning
- Stage 1
- The process of page turning starts. The robot drives the wrist joint, , and faces the surface of the F1-Link downward. If necessary, the robot moves forward.
- Stage 2
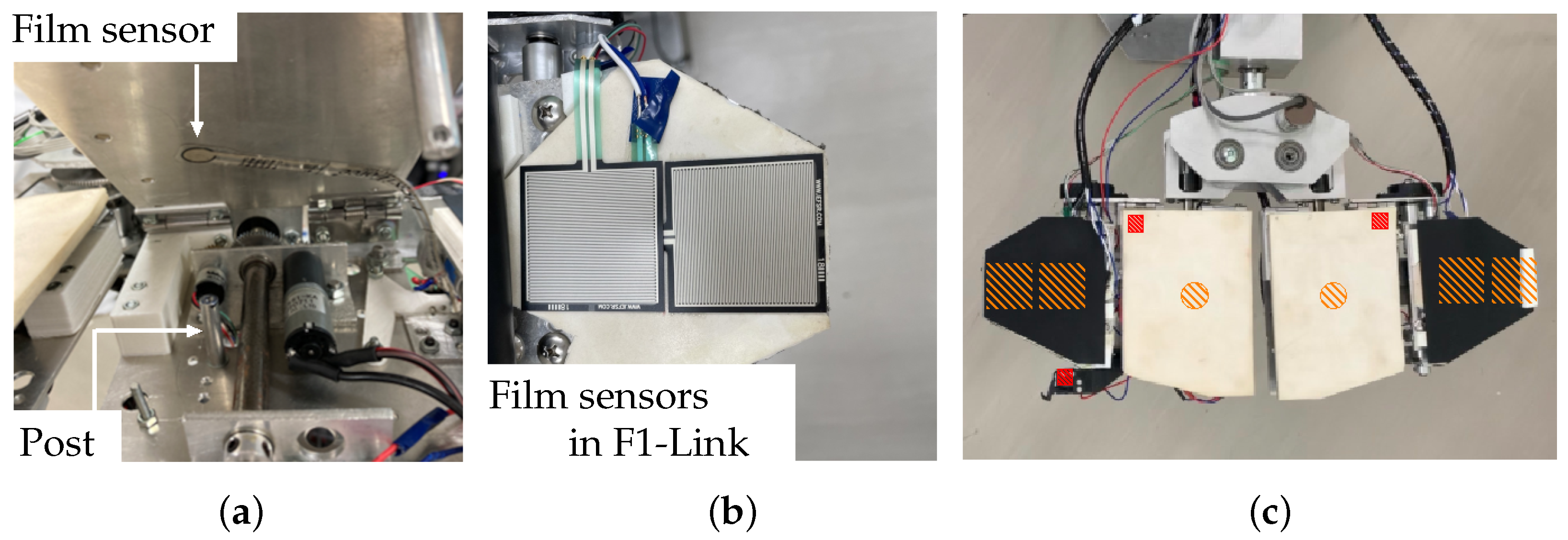
- The robot lowers the hand above the booklet. It drives the axis and turns the page using the U1-Link and the F1-Link. When the hand touches a page, the film sensor of the F1-Link detects it.
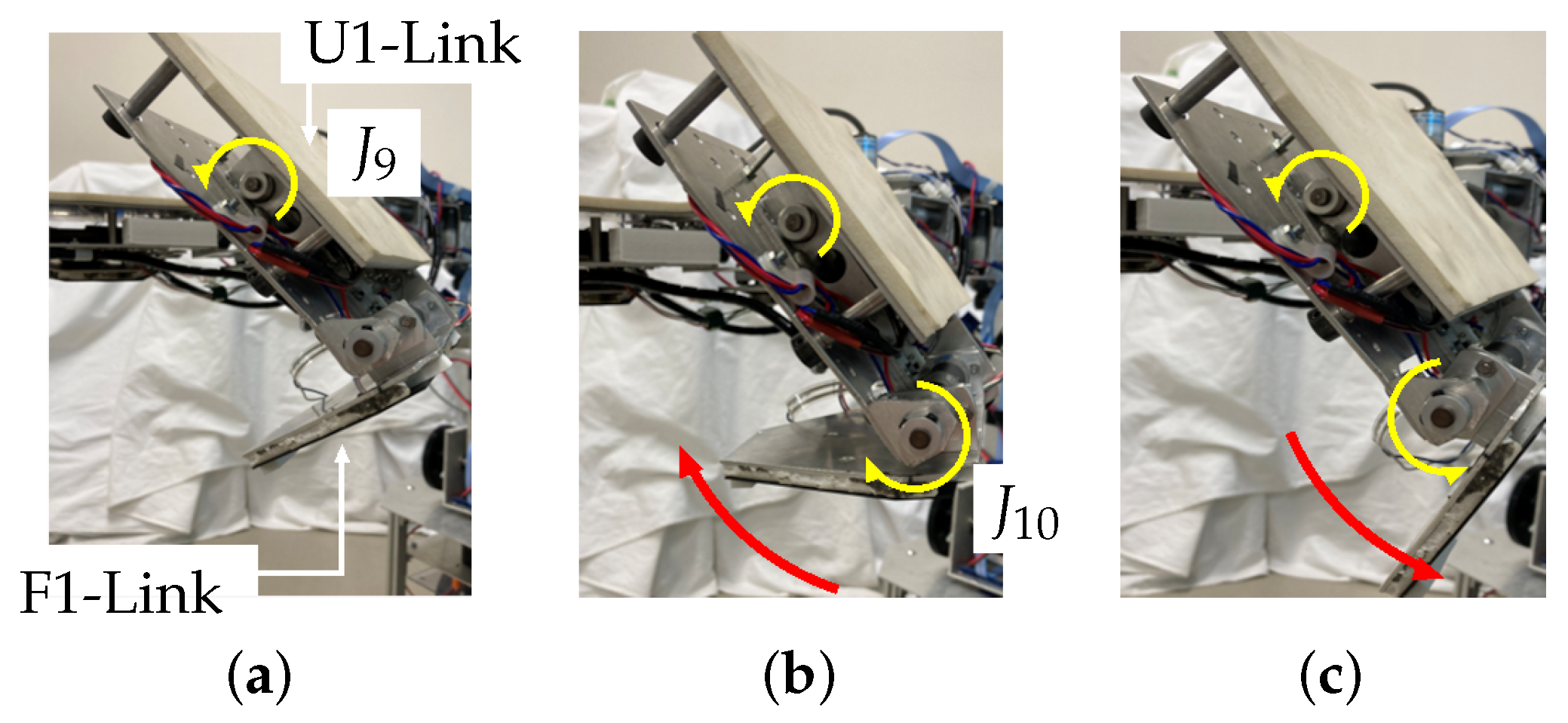
- Stage 3
- First, the robot rotates the U1-Link in the direction required to turn the page (, Figure 8a). When the surface of the hand comes into contact with the book, the film sensor of the F1-Link (Figure 4) detects the force exerted by the page. Here, if the height of the finger is too low, the finger will collide with the book (even if the robot keeps rotating the finger around ), and the trajectory of rotation will be limited; thus, page turning will fail. Therefore, if the film sensor detects a force larger than the set threshold, the U1-Link continues to rotate in the direction to turn the page, but the F1-Link rotates in the direction opposite to that of page turning (, Figure 8b). If the sensor then detects a force smaller than the set threshold, the F1-Link returns to rotating in the direction of page turning (Figure 8c). In this way, the force detected by the film sensor on the F1-Link is used to avoid stopping the rotational motion of the hand caused by contact during page-turning.
- Stage 4
- The finger continues to rotate and turn the page. When the F1-Link and the U1-Link rotate to the set position, the page-turning process ends, and the robot raises the hand.
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
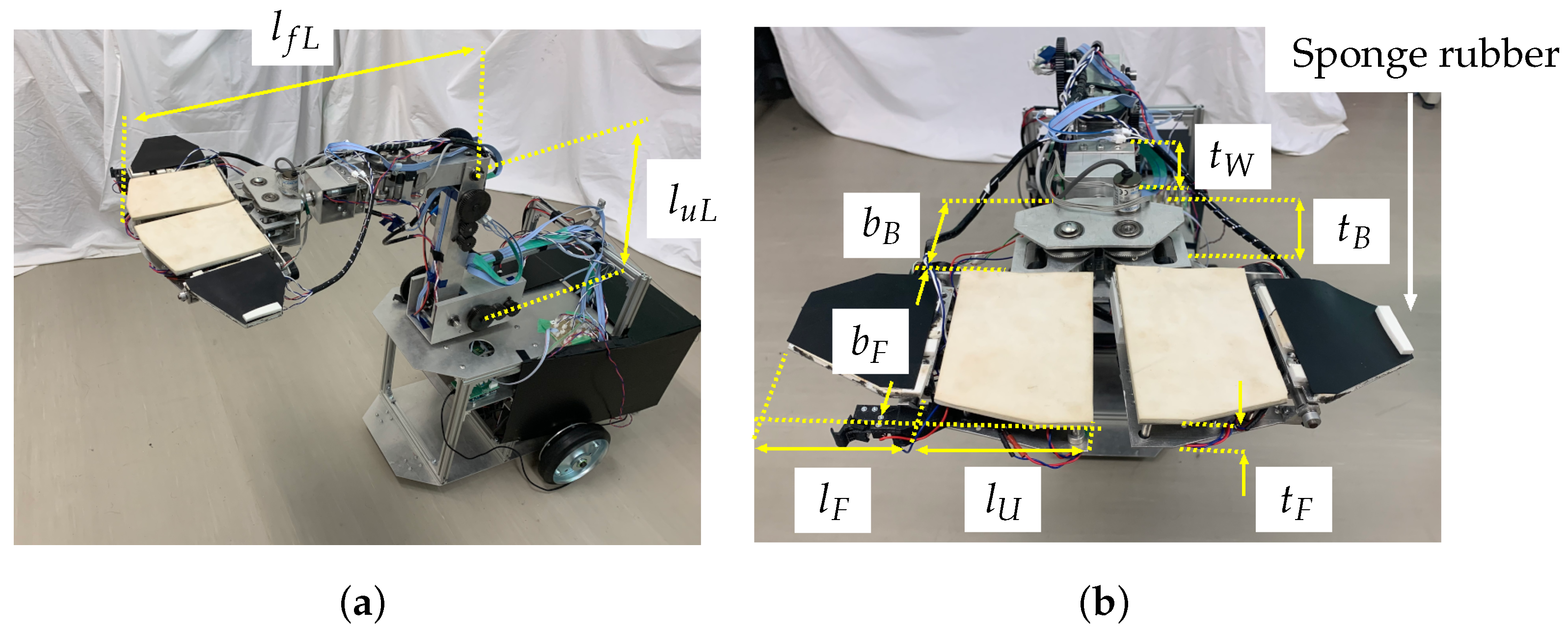
Size Parameters and Specifications of Manipulator and Robotic Hand

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Overall length of wheeled platform | 450 mm |
| Overall height of wheeled platform | 270 mm |
| Radius of front wheels | 15 mm |
| Radius of rear wheels | 90 mm |
| Wheelbase | 340 mm |
| Length of upper arm link of manipulator () | 300 mm |
| Length of forearm link of manipulator | |
| (length from elbow joint to claw mechanism, ) | 570 mm |
| Thickness of wrist () | 78 mm |
| Width of robot base () | 84 mm |
| Thickness of robot base () | 86 mm |
| Length of U-Link () | 132 mm |
| Length of F-Link () | 104 mm |
| Thickness of fingers () | 30 mm |
| Width of fingers () | 154 mm |
References
- Rakić, M. An automatic hand prosthesis. Med Electron. Biol. Eng. 1964, 2, 47–55. [Google Scholar] [CrossRef] [PubMed]
- Mouri, T.; Kawasaki, H.; Ito, S. Unknown object grasping strategy imitating human grasping reflex for anthropomorphic robot hand. J. Adv. Mech. Des. Syst. Manuf. 2007, 1, 1–11. [Google Scholar] [CrossRef]
- Lévesque, F.; Sauvet, B.; Cardou, P.; Gosselin, C. A model-based scooping grasp for the autonomous picking of unknown objects with a two-fingered gripper. Robot. Auton. Syst. 2018, 106, 14–25. [Google Scholar] [CrossRef]
- Reynaerts, D.; Van Brussel, H. Whole-finger manipulation with a two-fingered robot hand. Adv. Robot. 1994, 9, 505–518. [Google Scholar] [CrossRef]
- Dollar, A.M.; Howe, R.D. The highly adaptive SDM hand: Design and performance evaluation. Int. J. Robot. Res. 2010, 29, 585–597. [Google Scholar] [CrossRef]
- Laffranchi, M.; Boccardo, N.; Traverso, S.; Lombardi, L.; Canepa, M.; Lince, A.; Semprini, M.; Saglia, J.A.; Naceri, A.; Sacchetti, R.; et al. The Hannes hand prosthesis replicates the key biological properties of the human hand. Sci. Robot. 2020, 5, eabb0467. [Google Scholar] [CrossRef]
- Kawasaki, H.; Mouri, T. Humanoid robot hand and its applied research. J. Robot. Mechatron. 2019, 31, 16–26. [Google Scholar] [CrossRef]
- Furui, A.; Eto, S.; Nakagaki, K.; Shimada, K.; Nakamura, G.; Masuda, A.; Chin, T.; Tsuji, T. A myoelectric prosthetic hand with muscle synergy–based motion determination and impedance model–based biomimetic control. Sci. Robot. 2019, 4, eaaw6339. [Google Scholar] [CrossRef]
- Kragten, G.A.; Van der Helm, F.C.; Herder, J.L. A planar geometric design approach for a large grasp range in underactuated hands. Mech. Mach. Theory 2011, 46, 1121–1136. [Google Scholar] [CrossRef]
- Rojas, N.; Ma, R.R.; Dollar, A.M. The GR2 gripper: An underactuated hand for open-loop in-hand planar manipulation. IEEE Trans. Robot. 2016, 32, 763–770. [Google Scholar] [CrossRef]
- Odhner, L.U.; Dollar, A.M. Stable, open-loop precision manipulation with underactuated hands. Int. J. Robot. Res. 2015, 34, 1347–1360. [Google Scholar] [CrossRef]
- Stavenuiter, R.A.; Birglen, L.; Herder, J.L. A planar underactuated grasper with adjustable compliance. Mech. Mach. Theory 2017, 112, 295–306. [Google Scholar] [CrossRef]
- Kurita, Y.; Ono, Y.; Ikeda, A.; Ogasawara, T. Human-sized anthropomorphic robot hand with detachable mechanism at the wrist. Mech. Mach. Theory 2011, 46, 53–66. [Google Scholar] [CrossRef]
- Kontoudis, G.P.; Liarokapis, M.; Vamvoudakis, K.G.; Furukawa, T. An adaptive actuation mechanism for anthropomorphic robot hands. Front. Robot. AI 2019, 6, 47. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Wei, G.; Ren, L.; Qian, Z.; Wang, K.; Xiu, H.; Liang, W. A low-cost linkage-spring-tendon-integrated compliant anthropomorphic robotic hand: MCR-Hand III. Mech. Mach. Theory 2021, 158, 104210. [Google Scholar] [CrossRef]
- Maeno, T.; Hino, T. Miniature five-fingered robot hand driven by shape memory alloy actuators. In Proceedings of the 12th IASTED International Conference, Robotics and Applications, Honolulu, HI, USA, 14–16 August 2006; pp. 174–179. [Google Scholar]
- Della Santina, C.; Piazza, C.; Grioli, G.; Catalano, M.G.; Bicchi, A. Toward dexterous manipulation with augmented adaptive synergies: The pisa/iit softhand 2. IEEE Trans. Robot. 2018, 34, 1141–1156. [Google Scholar] [CrossRef]
- Abondance, S.; Teeple, C.B.; Wood, R.J. A dexterous soft robotic hand for delicate in-hand manipulation. IEEE Robot. Autom. Lett. 2020, 5, 5502–5509. [Google Scholar] [CrossRef]
- Wang, Z.; Or, K.; Hirai, S. A dual-mode soft gripper for food packaging. Robot. Auton. Syst. 2020, 125, 103427. [Google Scholar] [CrossRef]
- Chen, Y.; Guo, S.; Li, C.; Yang, H.; Hao, L. Size recognition and adaptive grasping using an integration of actuating and sensing soft pneumatic gripper. Robot. Auton. Syst. 2018, 104, 14–24. [Google Scholar] [CrossRef]
- Zhao, H.; O’brien, K.; Li, S.; Shepherd, R.F. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides. Sci. Robot. 2016, 1, eaai7529. [Google Scholar] [CrossRef]
- Sinatra, N.R.; Teeple, C.B.; Vogt, D.M.; Parker, K.K.; Gruber, D.F.; Wood, R.J. Ultragentle manipulation of delicate structures using a soft robotic gripper. Sci. Robot. 2019, 4, eaax5425. [Google Scholar] [CrossRef] [PubMed]
- Galloway, K.C.; Becker, K.P.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.J.; Gruber, D.F. Soft robotic grippers for biological sampling on deep reefs. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef] [PubMed]
- Devi, M.A.; Udupa, G.; Sreedharan, P. A novel underactuated multi-fingered soft robotic hand for prosthetic application. Robot. Auton. Syst. 2018, 100, 267–277. [Google Scholar]
- Amend, J.R.; Brown, E.; Rodenberg, N.; Jaeger, H.M.; Lipson, H. A positive pressure universal gripper based on the jamming of granular material. IEEE Trans. Robot. 2012, 28, 341–350. [Google Scholar] [CrossRef]
- Mizushima, K.; Oku, T.; Suzuki, Y.; Tsuji, T.; Watanabe, T. Multi-fingered robotic hand based on hybrid mechanism of tendon-driven and jamming transition. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; IEEE: New York, NY, USA, 2018; pp. 376–381. [Google Scholar]
- Fu, H.; Yang, H.; Song, W.; Zhang, W. A novel cluster-tube self-adaptive robot hand. Robot. Biomim. 2017, 4, 25. [Google Scholar] [CrossRef]
- Bircher, W.G.; Morgan, A.S.; Dollar, A.M. Complex manipulation with a simple robotic hand through contact breaking and caging. Sci. Robot. 2021, 6, eabd2666. [Google Scholar] [CrossRef]
- Hammond, F.L.; Weisz, J.; de la Llera Kurth, A.A.; Allen, P.K.; Howe, R.D. Towards a design optimization method for reducing the mechanical complexity of underactuated robotic hands. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 2843–2850. [Google Scholar] [CrossRef]
- Yuan, S.; Shao, L.; Yako, C.L.; Gruebele, A.; Salisbury, J.K. Design and control of roller grasper v2 for in-hand manipulation. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; IEEE: New York, NY, USA, 2020; pp. 9151–9158. [Google Scholar]
- Bicchi, A. Hands for dexterous manipulation and robust grasping: A difficult road toward simplicity. IEEE Trans. Robot. Autom. 2000, 16, 652–662. [Google Scholar] [CrossRef]
- Cini, F.; Ortenzi, V.; Corke, P.; Controzzi, M. On the choice of grasp type and location when handing over an object. Sci. Robot. 2019, 4, eaau9757. [Google Scholar] [CrossRef]
- Llop-Harillo, I.; Pérez-González, A.; Starke, J.; Asfour, T. The anthropomorphic hand assessment protocol (AHAP). Robot. Auton. Syst. 2019, 121, 103259. [Google Scholar] [CrossRef]
- Santello, M.; Flanders, M.; Soechting, J.F. Postural hand synergies for tool use. J. Neurosci. 1998, 18, 10105–10115. [Google Scholar] [CrossRef]
- Feix, T.; Pawlik, R.; Schmiedmayer, H.B.; Romero, J.; Kragic, D. A comprehensive grasp taxonomy. In Proceedings of the Robotics, Science and Systems: Workshop on Understanding the Human Hand for Advancing Robotic Manipulation, Seattle, WA, USA, 28 June 2009; Volume 2, pp. 2–3. [Google Scholar]
- Feix, T.; Romero, J.; Schmiedmayer, H.B.; Dollar, A.M.; Kragic, D. The grasp taxonomy of human grasp types. IEEE Trans. Hum.-Mach. Syst. 2015, 46, 66–77. [Google Scholar] [CrossRef]
- Ikeda, H.; Saeki, T. Transformation of foldable robotic hand to scissor-like shape for pinching based on human hand movement. Sci. Rep. 2023, 13, 19150. [Google Scholar] [CrossRef]
- Ikeda, H.; Saeki, T.; Takabayashi, K. Retrieving a file binder from a bookshelf using pseudo-curved trajectory generation for a foldable robotic hand. Sci. Rep. 2024, 14, 11687. [Google Scholar] [CrossRef] [PubMed]
- Ueda, J.; Negi, R.; Yoshikawa, T. Acquisition of a page turning skill for a multifingered hand using reinforcement learning. Adv. Robot. 2004, 18, 101–114. [Google Scholar] [CrossRef]
- Nakazawa, N.; Segawa, S.; Ozawa, N.; Haruyama, Y.; Kim, I.; Fujii, Y. Human Interface Based on Eyelid Shape Approximation. Int. J. Comput. Theory Eng. 2017, 9, 48. [Google Scholar] [CrossRef]
- Tomizawa, T.; Ohya, A.; Yuta, S. A Robot System for Remote Book Browsing. IEEJ Trans. Electron. Inf. Syst. 2005, 125, 863–869. (In Japanese) [Google Scholar] [CrossRef]
- Watanabe, Y.; Tamei, M.; Yamada, M.; Ishikawa, M. Automatic page turner machine for high-speed book digitization. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 272–279. [Google Scholar] [CrossRef]
- Hyland, M.; Jang, S.H.; Shin, A.; van Loenen, N.; de Wit, W. Enabling Independence in Reading with the Manual Page Turning Facilitative Device. In Proceedings of the RESNA Annual Conference, Las Vegas, NV, USA, 26–30 June 2010; pp. 26–30. [Google Scholar]
- Mochizuki, A.; Noro, S.; Sato, G.; Nakata, T.; Kokubo, K.; Sasaki, K. Development of an efficient page-turning mechanism for automated teller machines. Microsyst. Technol. 2002, 9, 31–35. [Google Scholar] [CrossRef]

| F1-Link | Right forearm link of finger |
| F2-Link | Left forearm link of finger |
| U1-Link | Right upper link of finger |
| U2-Link | Left upper link of finger |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ikeda, H.; Mizukami, Y.; Sakamoto, M.; Saeki, T.; Lee, H.; Hori, M. Page Turning Using Assistive Robot with Low-Degree-of-Freedom Hand. Sensors 2024, 24, 6162. https://doi.org/10.3390/s24196162
Ikeda H, Mizukami Y, Sakamoto M, Saeki T, Lee H, Hori M. Page Turning Using Assistive Robot with Low-Degree-of-Freedom Hand. Sensors. 2024; 24(19):6162. https://doi.org/10.3390/s24196162
Chicago/Turabian StyleIkeda, Hidetoshi, Yuta Mizukami, Masahiro Sakamoto, Takumi Saeki, Hokyoo Lee, and Masakazu Hori. 2024. "Page Turning Using Assistive Robot with Low-Degree-of-Freedom Hand" Sensors 24, no. 19: 6162. https://doi.org/10.3390/s24196162