

Finite Element Analysis of Electrostatic Coupling in LISA Pathfinder Inertial Sensors


Abstract
:1. Introduction
2. Theoretical Analysis
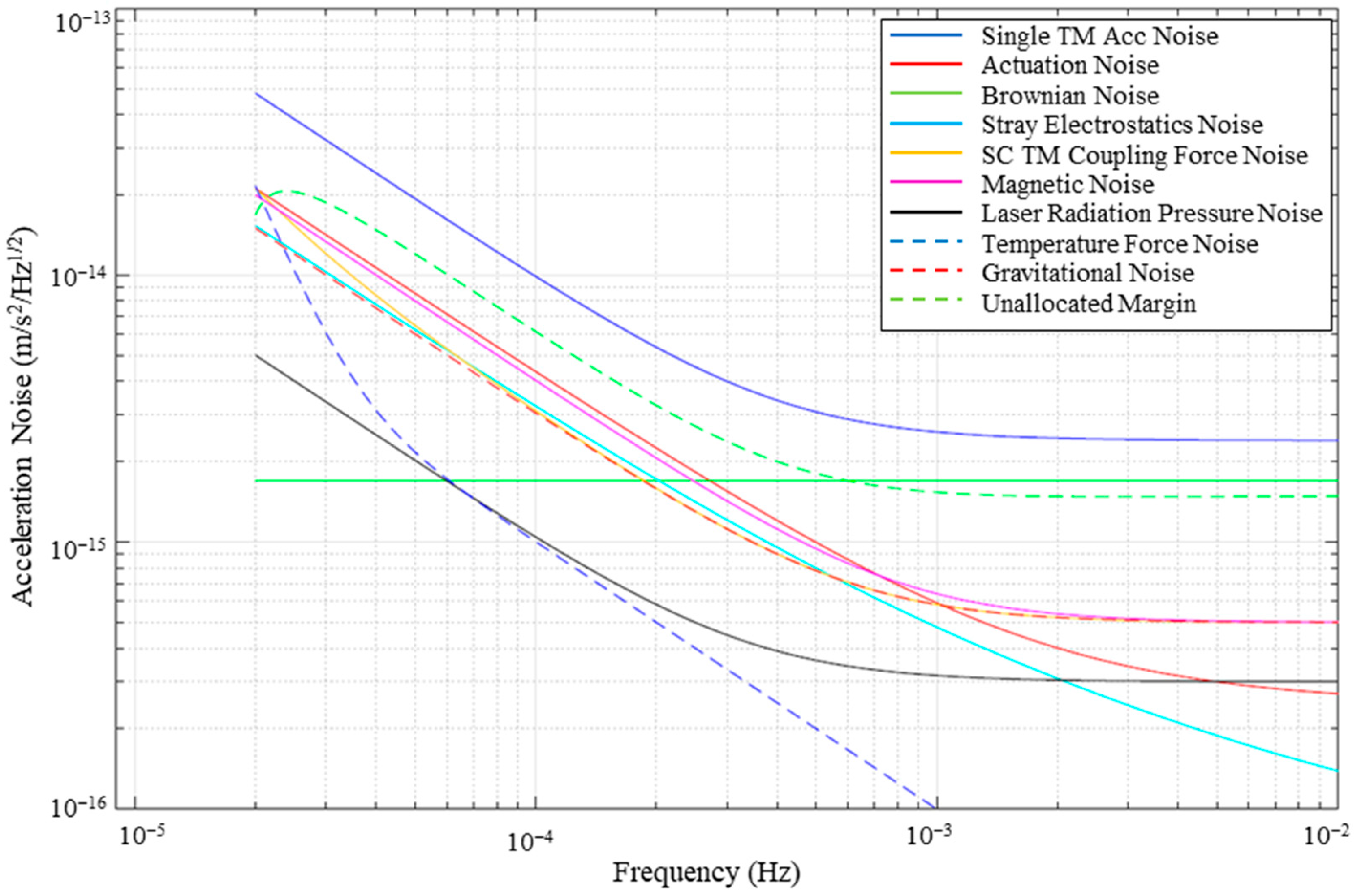
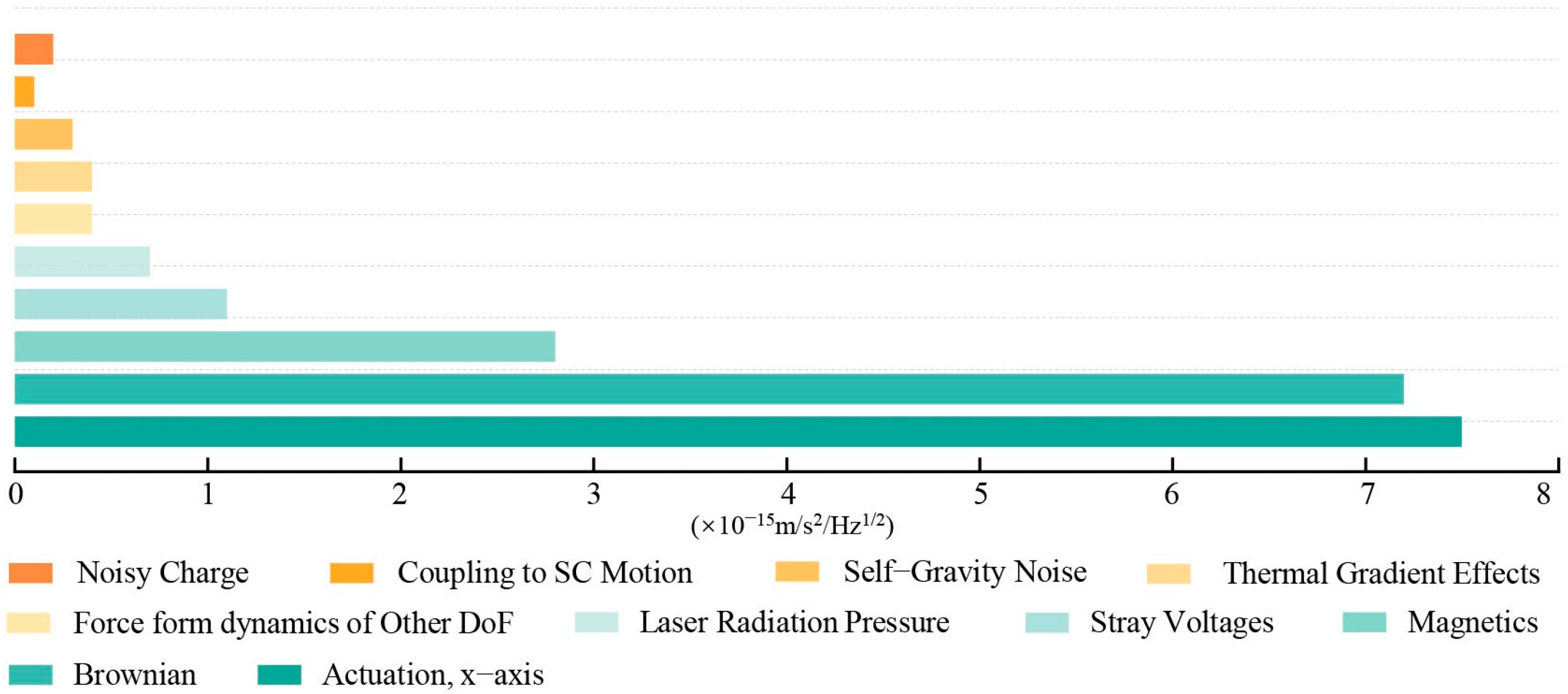
2.1. Electrostatic Noise in LPF
2.2. Stray Distributed Potential
2.2.1. Stray Electrostatics Induced by the Driving Voltage
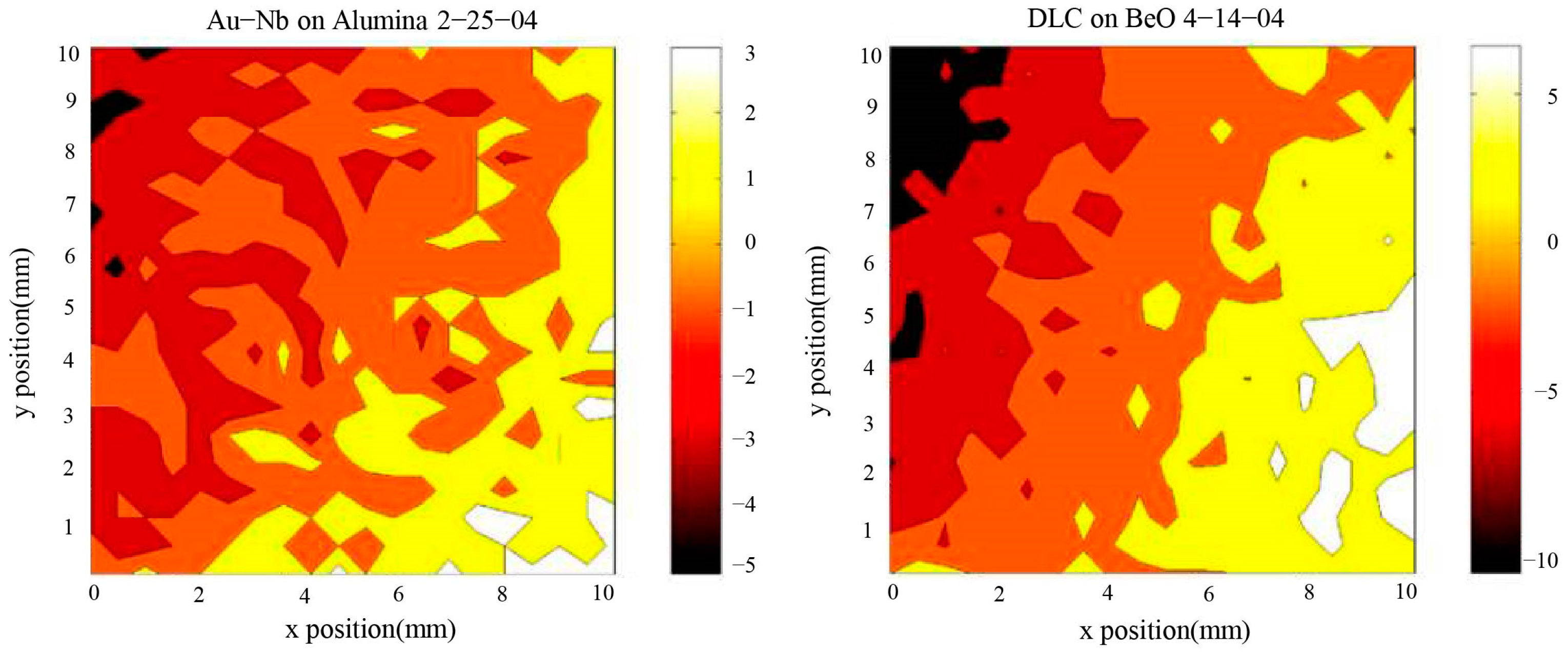
2.2.2. Stray Electrostatics Induced by the Patch Effect
2.3. Residual Charge on the TM
3. Finite Element Simulation Analysis
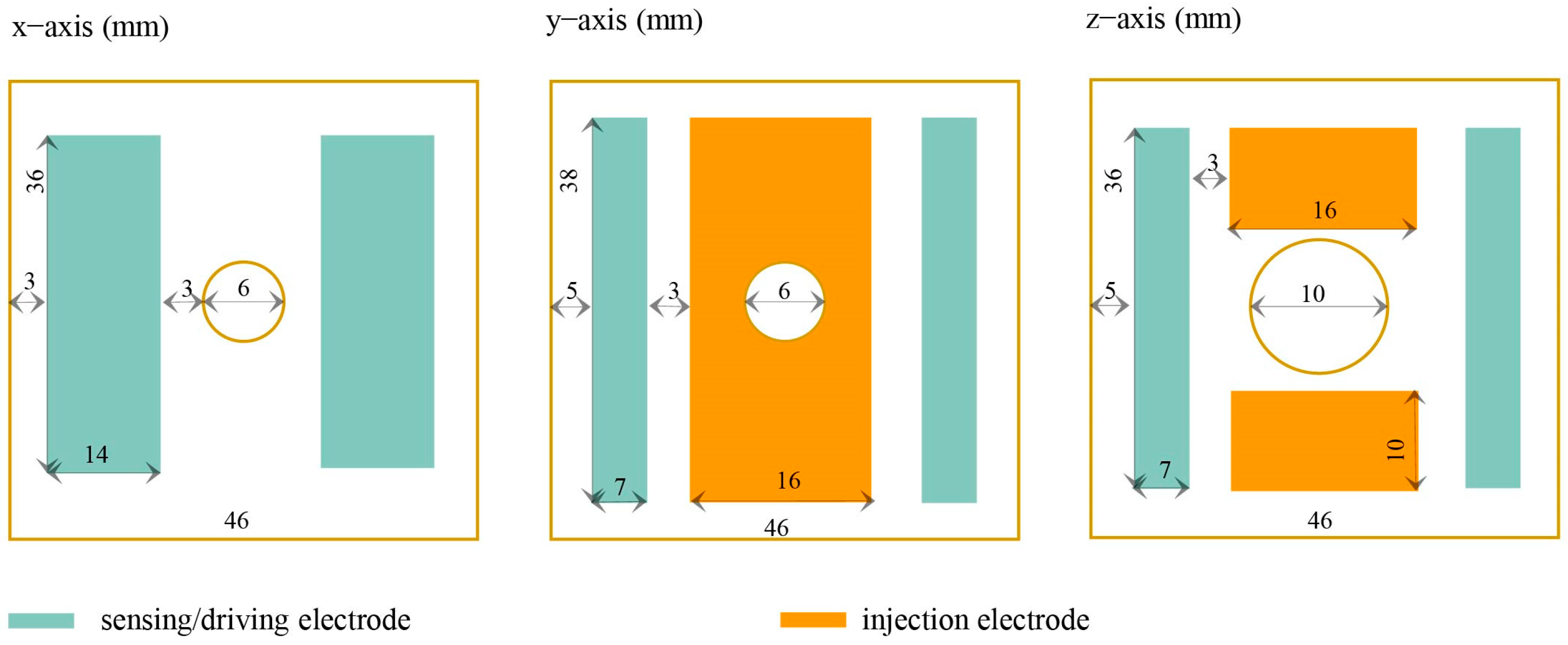
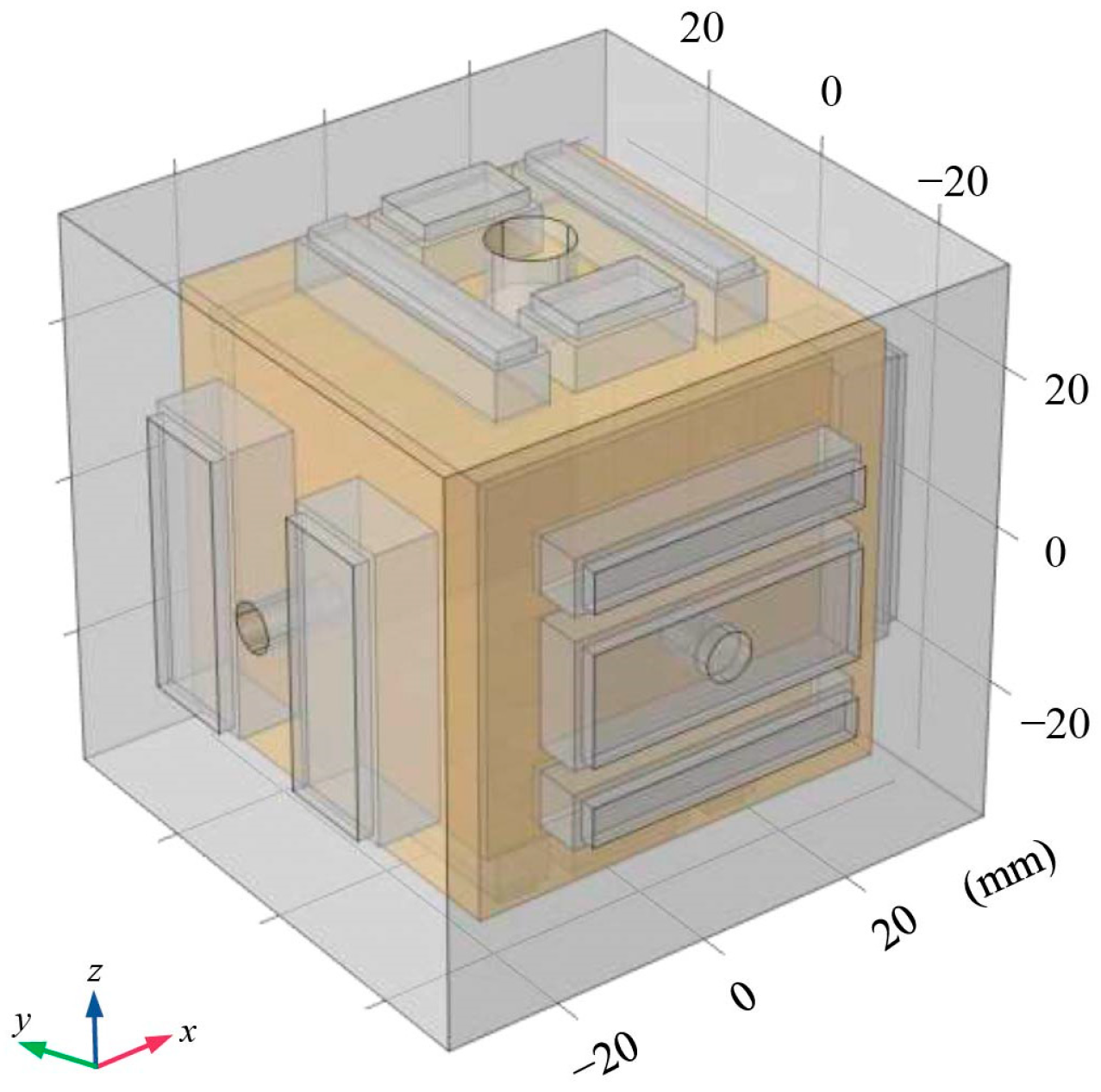
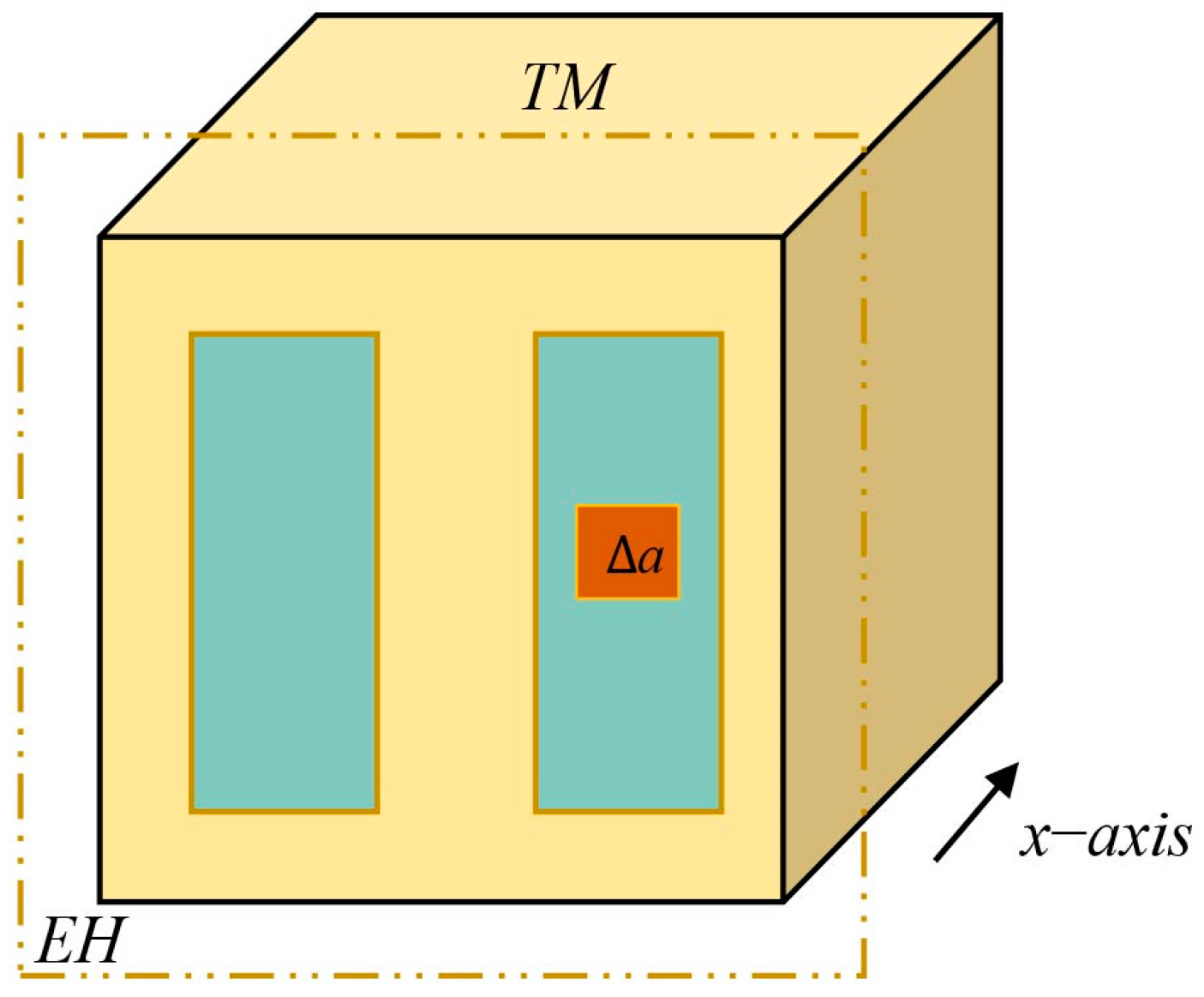
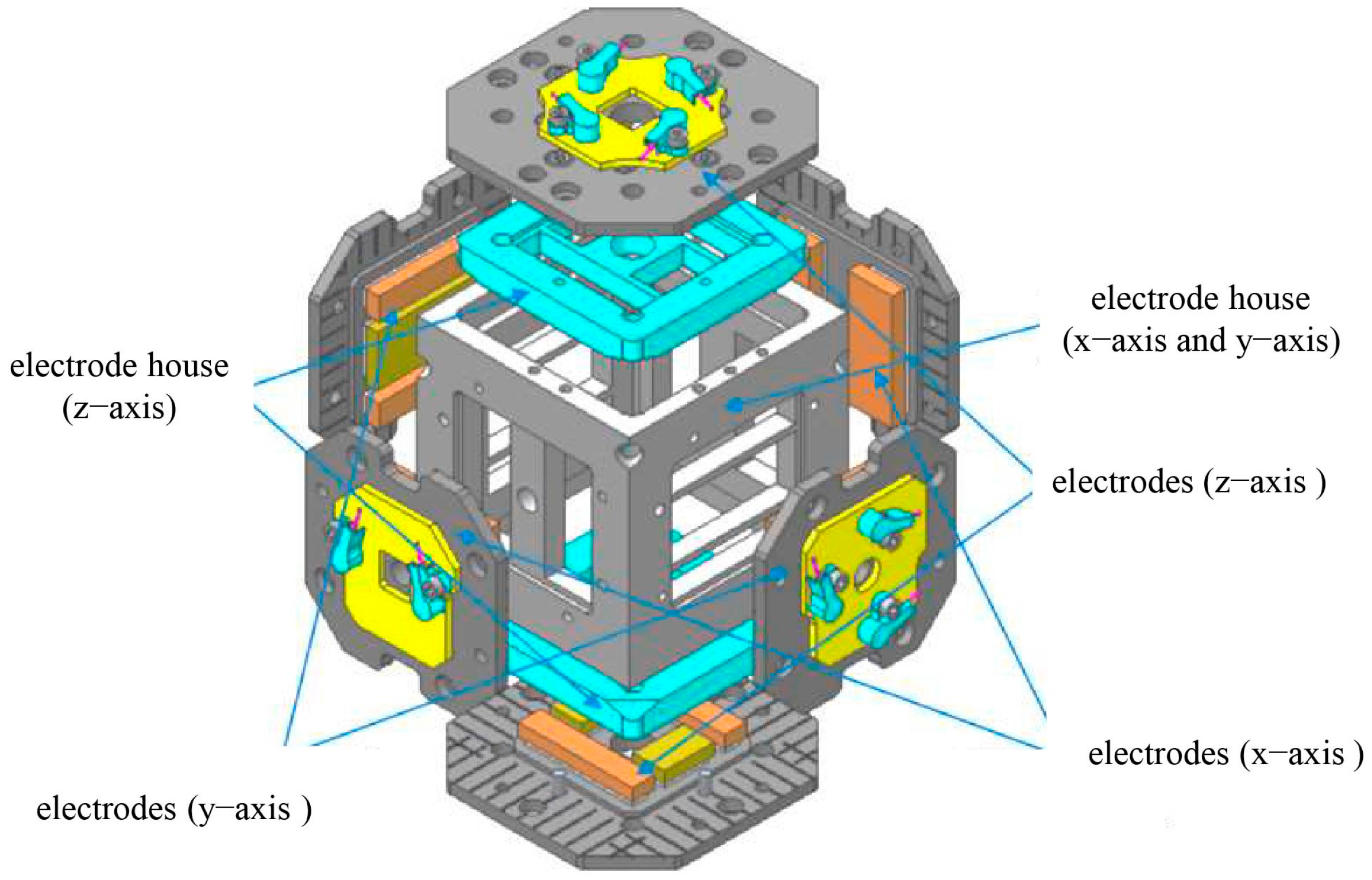
3.1. Geometric Model
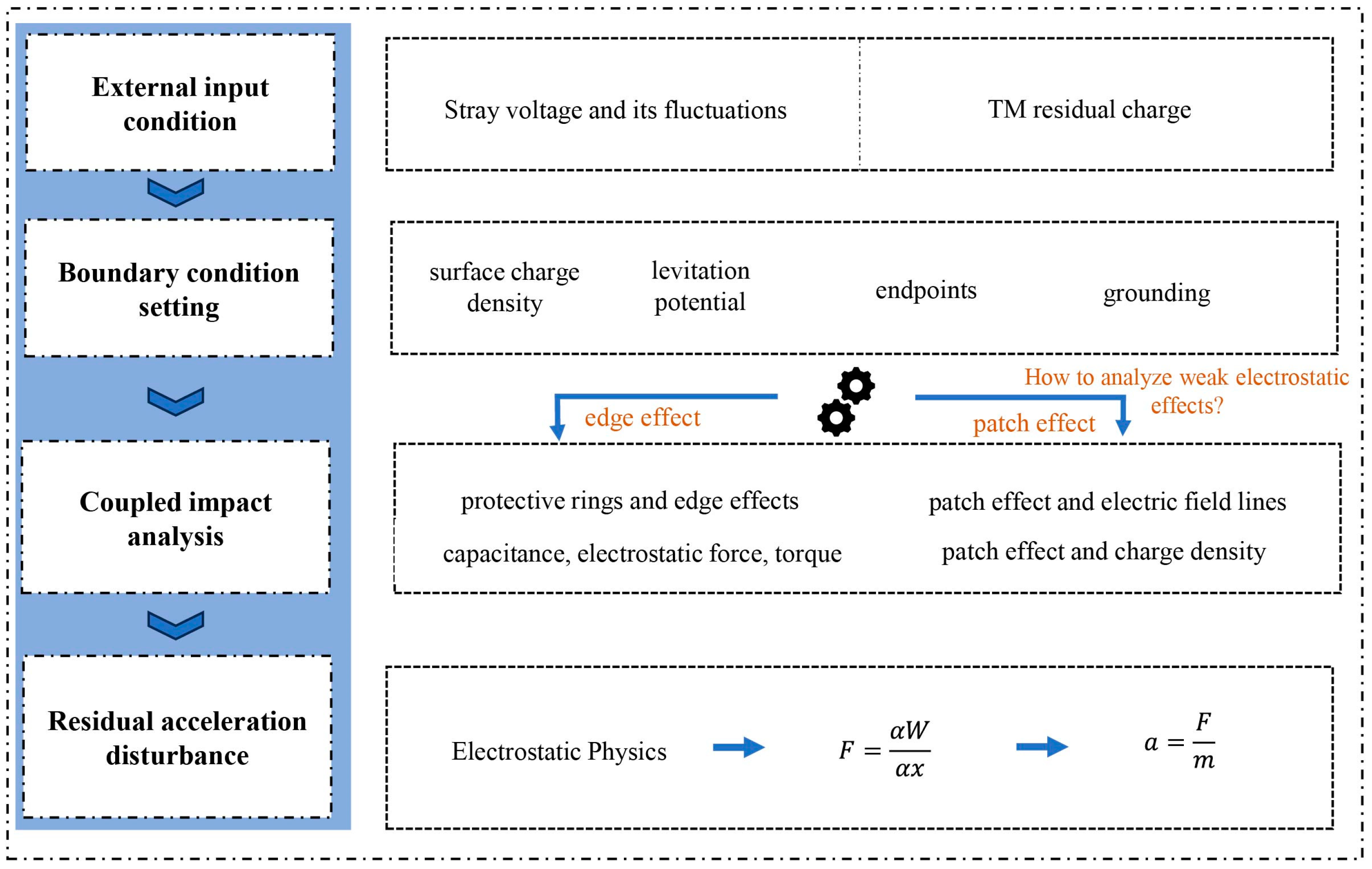
3.2. Simulation Model
4. Results and Discussion
4.1. Edge Effect and Grounding Protection Ring
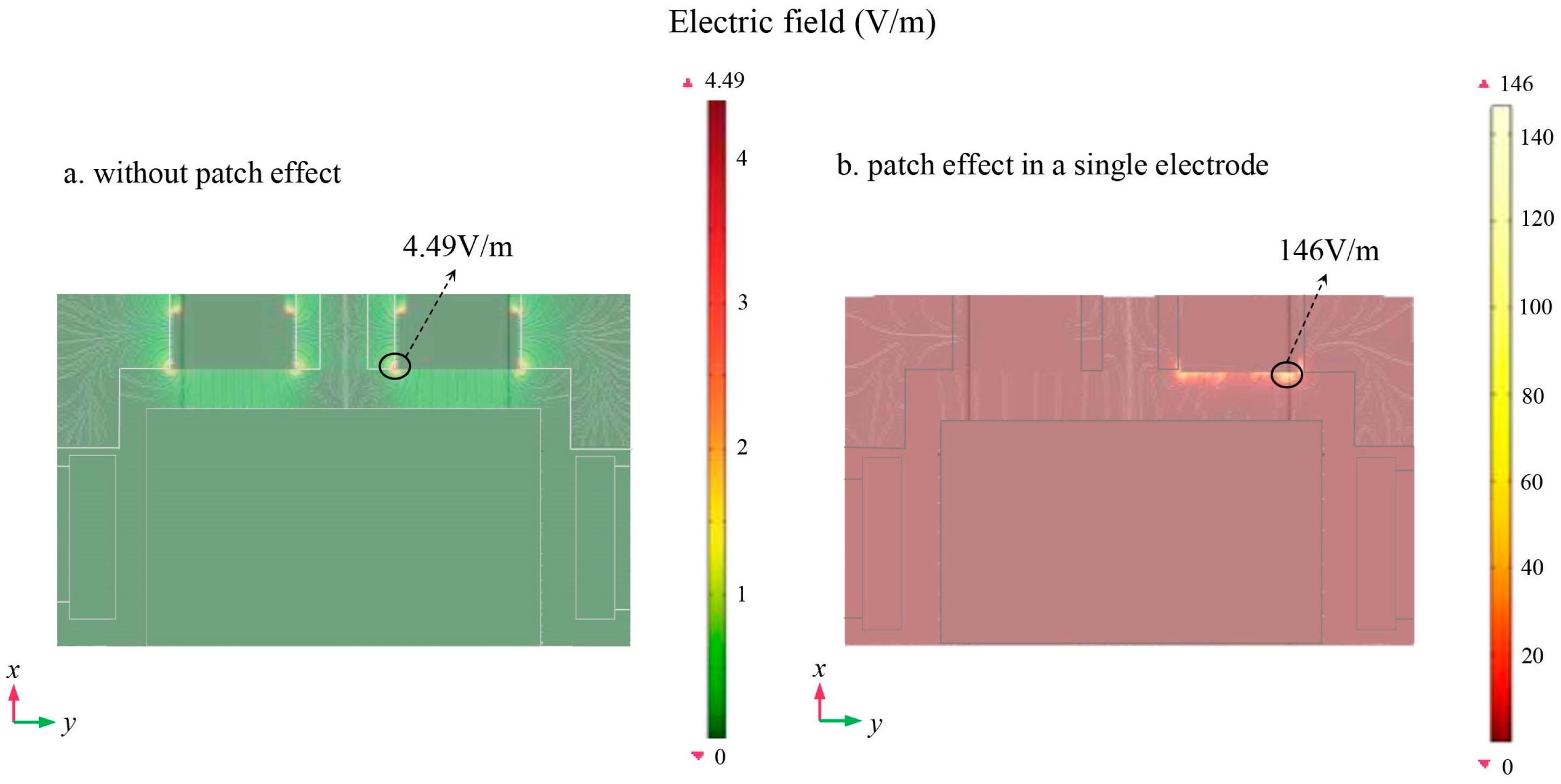
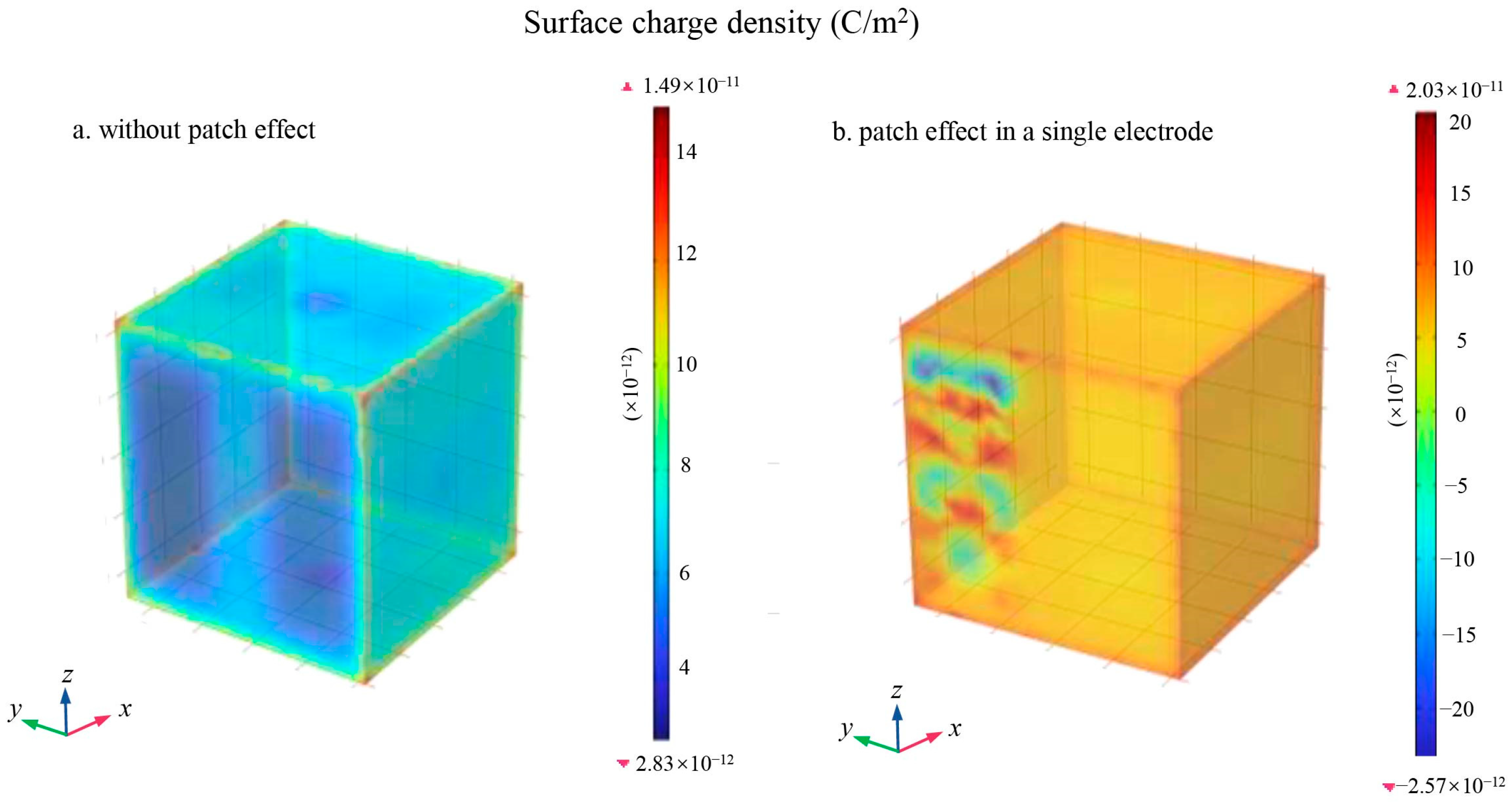
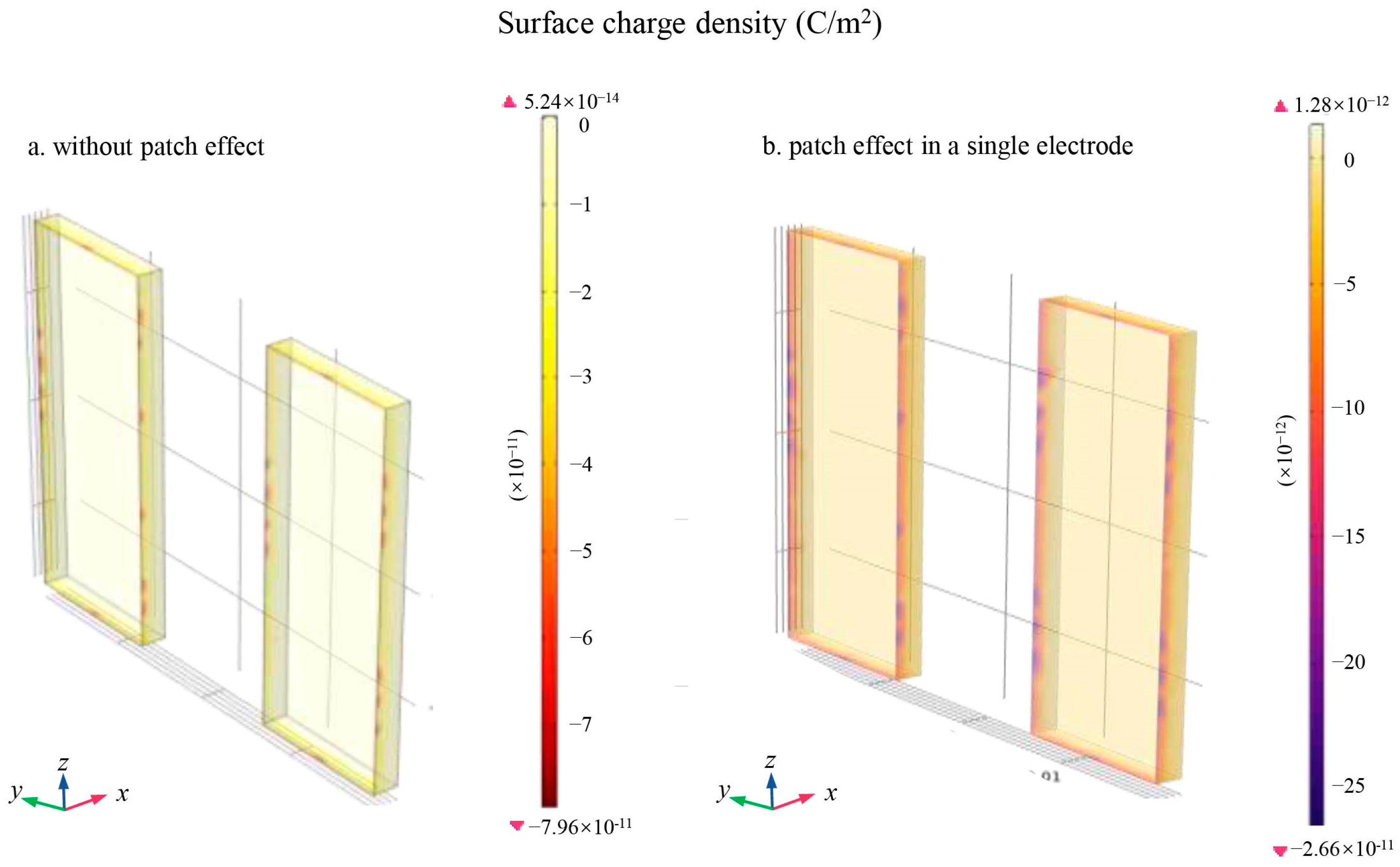
4.2. Patch Effect
4.3. Analysis of Capacitance, Electrostatic Force, and Torque
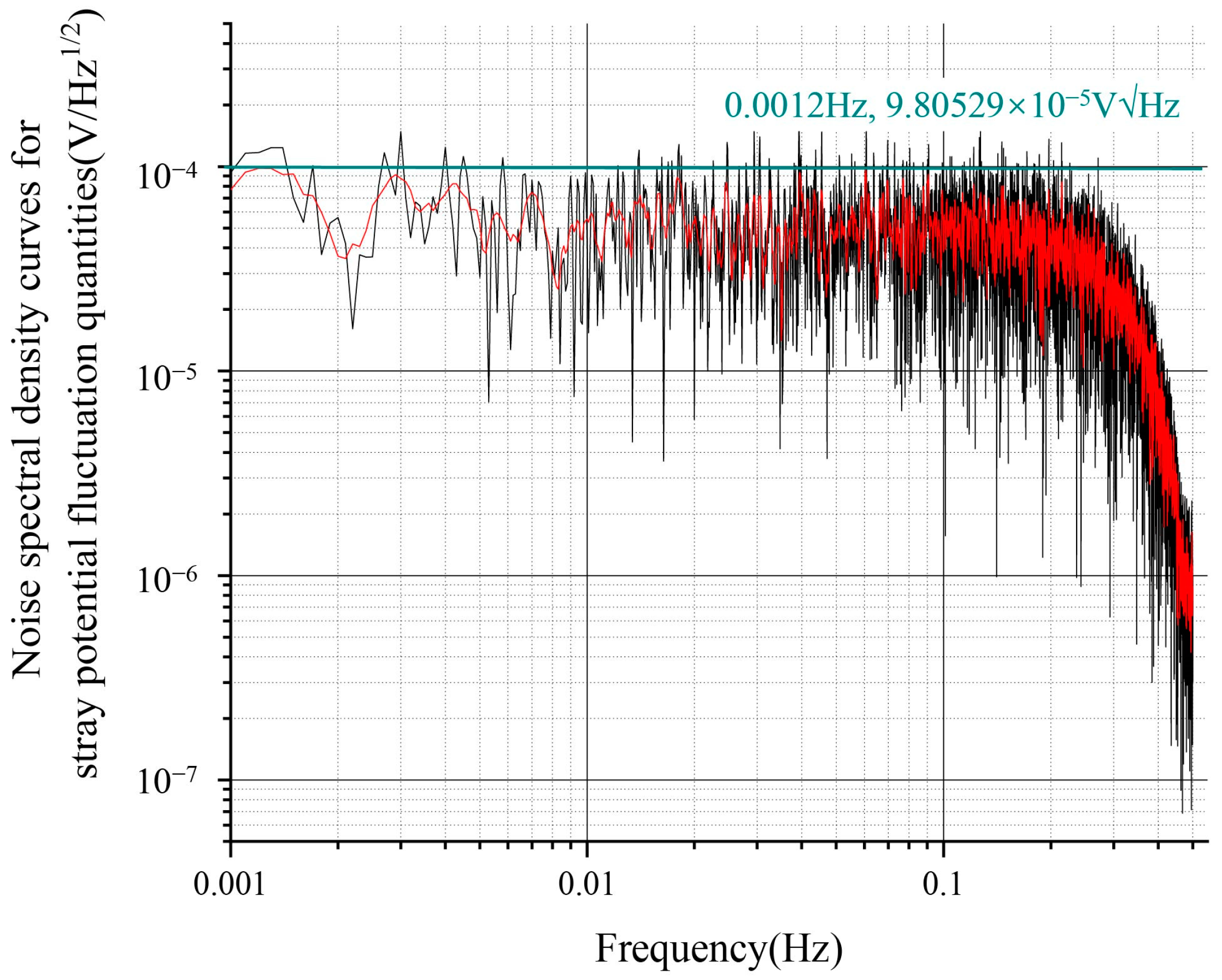
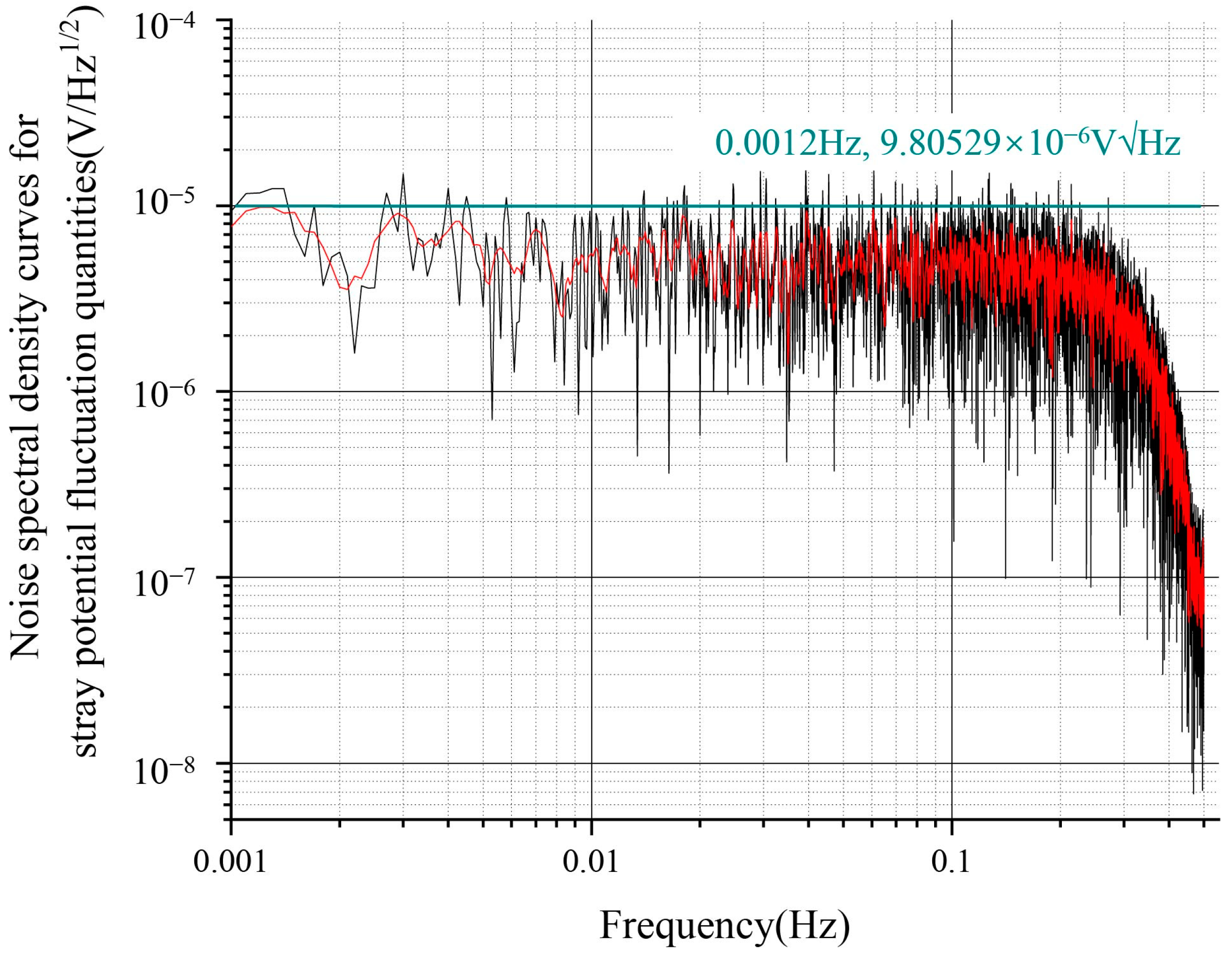
4.4. Electrostatic Noise Due to Coupling of Stray Voltage and Residual Charge
5. Conclusions
- (1)
- We found through simulation that the protective ring exhibited different effects on different axes in suppressing the edge effect between the electrode and the TM: the x-axis direction showed the strongest suppression effect, the z-axis direction demonstrated the second strongest suppression effect, and the y-axis direction had the weakest suppression effect. This variation also led to differences between the simulated and calculated values of capacitance, electromagnetic force, and torque in the sensitive probe of the inertial sensors.
- (2)
- In this study, we investigated the specific implementation of the patch effect in the simulation model, and the simulation results show that the spatial differences and temporal variations of the patch effect correlate with the electric field distribution between the TM and the electrodes, the charge distribution of the TM, and the charge of the ceramic spacer. Furthermore, this correlation impacted the overall performance of the inertial sensors.
- (3)
- In this model, the charging rate of the TM was simulated with a constant value under worst-case conditions. However, according to the analysis results from the Geant4 model, the charging rate of the TM can vary with the influence of space environmental factors such as solar activity. Therefore, future research will incorporate charge transport models to investigate the charging and discharging processes of the TM and provide a deeper understanding of how the charging behavior of low-energy electrons affects the performance of the inertial sensor.
- (4)
- Although our research primarily focused on the simulation and analysis of electrostatic noise in inertial sensors, we also recognize that other factors such as temperature, pressure, and magnetic field can significantly affect their performance. Therefore, to address this important issue, we plan to adopt a multi-field coupling approach in our future research to explore the interactions among these environmental factors in greater depth. By extending the simulation model to include more environmental variables, we hope to evaluate the performance of inertial sensors under complex environmental conditions more comprehensively. Ultimately, our goal is to develop an integrated model that more closely resembles the noise characteristics of real inertial sensors, thereby providing a theoretical foundation and data support for optimizing sensor performance in practical applications.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Antonucci, F.; Armano, M.; Audley, H. LISA Pathfinder: Mission and status. Class. Quantum Gravity 2011, 28, 094001. [Google Scholar] [CrossRef]
- Brandt, N.; Fichter, W. Revised electrostatic model of the LISA Pathfinder inertial sensor. J. Phys. Conf. Ser. 2009, 154, 012008. [Google Scholar] [CrossRef]
- Buchman, S.; Lipa, J.; Byer, R. Lisa-2020: An intermediate scale space gravitational wave observatory for this decade. arXiv 2013, arXiv:1302.2368. [Google Scholar]
- Armano, M.; Audley, H.; Auger, G. Capacitive sensing of test mass motion with nanometer precision over millimeter-wide sensing gaps for space-borne gravitational reference sensors. Phys. Rev. D 2017, 96, 062004. [Google Scholar] [CrossRef]
- Chilton, A. Technology Development for the LISA Mission. Doctoral Dissertation, University of Florida, Gainesville, FL, USA, 2019. [Google Scholar]
- Antonucci, F.; Armano, M.; Audley, H. From laboratory experiments to LISA Pathfinder: Achieving LISA geodesic motion. Class. Quantum Gravity 2011, 28, 094002. [Google Scholar] [CrossRef]
- Armano, M.; Benedetti, M.; Bogenstahl, J.; Bortoluzzi, D.; Bosetti, P.; Brandt, N.; Cavalleri, A.; Ciani, G.; Cristofolini, I.; Cruise, A.M.; et al. LISA Pathfinder: The experiment the route to LISA. Class. Quantum Gravity 2009, 26, 094001. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Auger, G. Charge-induced force noise on free-falling test masses: Results from LISA Pathfinder. Phys. Rev. Lett. 2017, 118, 171101. [Google Scholar] [CrossRef]
- Weber, W.J.; Bortoluzzi, D.; Bosetti, P. Application of LISA gravitational reference sensor hardware to future intersatellite geodesy missions. Remote Sens. 2022, 14, 3092. [Google Scholar] [CrossRef]
- Li, W.; Zhao, W.; Chen, S. Tunable Metamaterial Absorption Device based on Fabry–Perot Resonance as Temperature and Refractive Index Sensing. Opt. Lasers Eng. 2024, 181, 108368. [Google Scholar] [CrossRef]
- Liang, S.; Xu, F.; Li, W. Tunable smart mid infrared thermal control emitter based on phase change material VO2 thin film. Appl. Therm. Eng. 2023, 232, 121074. [Google Scholar] [CrossRef]
- Liang, S.; Cheng, S.; Zhang, H. Structural color tunable intelligent mid-infrared thermal control emitter. Ceram. Int. 2024, 50, 23611–23620. [Google Scholar] [CrossRef]
- Li, W.; Liu, Y.; Ling, L. The tunable absorber films of grating structure of AlCuFe quasicrystal with high Q and refractive index sensitivity. Surf. Interfaces 2024, 48, 104248. [Google Scholar] [CrossRef]
- Zheng, J.; Li, B.; Zha, K. Equipotential shielding voltage sensor for contact measurement of transient voltage in EHV/UHV power grids. High Volt. 2021, 6, 291–301. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Baird, J. Charging of free-falling test masses in orbit due to cosmic rays: Results from LISA Pathfinder. Phys. Rev. D 2023, 107, 062007. [Google Scholar] [CrossRef]
- Shaul, D.N.; Sumner, T.J.; Araujo, H.M. Unwanted, coherent signals in the LISA bandwidth due to test mass charging. Class. Quantum Gravity 2004, 21, S647. [Google Scholar] [CrossRef]
- Grimani, C.; Cesarini, A.; Fabi, M. Low-energy electromagnetic processes affecting free-falling test-mass charging for LISA and future space interferometers. Class. Quantum Gravity 2020, 38, 045013. [Google Scholar] [CrossRef]
- Antonucci, F.; Cavalleri, A.; Dolesi, R. Interaction between stray electrostatic fields and a charged free-falling test mass. Phys. Rev. Lett. 2012, 108, 181101. [Google Scholar] [CrossRef]
- Giusteri, R.; LPF Collaboration. The free-fall mode experiment on LISA Pathfinder: First results. J. Phys. Conf. Ser. 2017, 840, 012005. [Google Scholar] [CrossRef]
- Robertson, N.A.; Blackwood, J.R.; Buchman, S. Kelvin probe measurements: Investigations of the patch effect with applications to ST-7 and LISA. Class. Quantum Gravity 2006, 23, 2665. [Google Scholar] [CrossRef]
- Sumner, T.J.; Mueller, G.; Conklin, J.W. Charge induced acceleration noise in the LISA gravitational reference sensor. Class. Quantum Gravity 2020, 37, 045010. [Google Scholar] [CrossRef]
- Carbone, L.; Cavalleri, A.; Dolesi, R. Upper limits on stray force noise for LISA. Class. Quantum Gravity 2004, 21, S611. [Google Scholar] [CrossRef]
- Mance, D. Development of Electronic System for Sensing and Actuation of TM of the Inertial Sensor LISA. Ph.D. Thesis, University of Split, Split, Croatia, 2012. [Google Scholar]
- Suryani, L. The Effects of Pulsed Electromagnetic Field on Bone Regeneration. Ph.D. Thesis, Nanyang Technological University, Singapore, 2021. [Google Scholar]
- Armano, M.; Audley, H.; Baird, J. Lisa pathfinder. In Lepton Photon Interactions at High Energies: Proceedings of the 28th International Symposium 2020; World Scientific: Singapore, 2020; pp. 185–204. [Google Scholar]
- Apple, S. Design and Performance Characterization of a New Lisa-Like Gravitational Reference Sensor Test-Bed Using the Uf Torsion Pendulum; University of Florida: Gainesville, FL, USA, 2020. [Google Scholar]
- Dal Bosco, D. Torsion Pendulum Testing of the LISA Charge Management System. Doctoral Dissertation, University of Trento, Trento, Italy, 2023; p. 271. [Google Scholar]
- Armano, M.; Audley, H.; Auger, G. Sub-femto-g free fall for space-based gravitational wave observatories: LISA pathfinder results. Phys. Rev. Lett. 2016, 116, 231101. [Google Scholar] [CrossRef] [PubMed]
- Wass, P.J.; Sumner, T.J.; Araújo, H.M. Simulating the charging of isolated free-falling masses from TeV to eV energies: Detailed comparison with LISA Pathfinder results. Phys. Rev. D 2023, 107, 022010. [Google Scholar] [CrossRef]
- Sandu, T.; Boldeiu, G.; Moagar-Poladian, V. Applications of electrostatic capacitance and charging. J. Appl. Phys. 2013, 114, 224904. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Baird, J. LISA pathfinder performance confirmed in an open-loop configuration: Results from the free-fall actuation mode. Phys. Rev. Lett. 2019, 123, 111101. [Google Scholar] [CrossRef]
- Taioli, S.; Dapor, M.; Dimiccoli, F. The role of low-energy electrons in the charging process of LISA test masses. Class. Quantum Gravity 2023, 40, 075001. [Google Scholar] [CrossRef]
- Weber, W.J.; Carbone, L.; Cavalleri, A. Possibilities for measurement and compensation of stray DC electric fields acting on drag-free test masses. Adv. Space Res. 2007, 39, 213–218. [Google Scholar] [CrossRef]
- Ferraioli, L.; Congedo, G.; Hueller, M. Quantitative analysis of LISA pathfinder test-mass noise. Phys. Rev. D—Part. Fields Gravit. Cosmol. 2011, 84, 122003. [Google Scholar] [CrossRef]
- COMSOL User’s Guide. 2018. Available online: www.comsol.com (accessed on 15 April 2023).
- El-Sheimy, N.; Youssef, A. Inertial sensors technologies for navigation applications: State of the art and future trends. Satell. Navig. 2020, 1, 2. [Google Scholar] [CrossRef]
- Chilto, A.; Shelley, R.; Olatunde, T. The UF torsion pendulum, a LISA technology testbed: Sensing system and initial results. J. Phys. Conf. Ser. 2015, 610, 012038. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Baird, J. Nano-Newton electrostatic force actuators for femto-Newton-sensitive measurements: System performance test in the LISA Pathfinder mission. Phys. Rev. D 2024, 109, 102009. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Unit | 73%Au27%Pt | Gold | Molybdenum | Aluminum Nitride |
|---|---|---|---|---|---|
| Density | kg/m3 | 20,547 | 19,320 | 10,200 | 3250 |
| Relative permittivity | 1 | 3 | 2.4 | 4.8 | 9 |
| Poisson’s ratio | 1 | 0.36 | 0.4 | 0.31 | 0.25 |
| Thermal conductivity | W/(m·K) | 317 | 317.9 | 176 | 300 |
| Young’s modulus | Pa | 150 × 109 | 79 × 109 | 329 × 109 | 300 × 109 |
| Constant pressure heat capacity | J/(kg·K) | 127 | 128 | 138 | 750 |
| Capacitance | Cxsens-TM | Cysens-TM | Czsens-TM | Cyinj-TM | Czinj-TM | CEH-TM | Ctotal |
|---|---|---|---|---|---|---|---|
| Calculated value | 1.12 × 10−12 | 8.12 × 10−13 | 6.37 × 10−13 | 1.58 × 10−12 | 3.54 × 10−13 | 1.49 × 10−11 | 2.98 × 10−11 |
| Simulated value | 1.22 × 10−12 | 9.46 × 10−13 | 8.12 × 10−13 | 1.54 × 10−12 | 3.44 × 10−13 | 2.11 × 10−11 | 3.75 × 10−11 |
| Error | 8.60% | 14.19% | 21.53% | 2.49% | 2.85% | 29.28% | 25.93% |
| Type | Axis | Calculated Value | Simulated Value | Error |
|---|---|---|---|---|
| Force (N) | X-axis | 5.60 × 10−12 | 4.20 × 10−12 | 25.04% |
| Y-axis | 9.35 × 10−12 | 7.16 × 10−12 | 23.47% | |
| Z-axis | 4.51 × 10−12 | 4.19 × 10−12 | 7.11% | |
| Torque (N·m) | Rotation around z-axis | 5.14 × 10−14 | 4.46 × 10−14 | 13.16% |
| Rotation around x-axis | 7.11 × 10−14 | 5.47 × 10−14 | 23.14% | |
| Rotation around y-axis | 5.88 × 10−14 | 5.43 × 10−14 | 7.63% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Lei, J.; Wang, Z.; Li, C.; Yang, S.; Min, J.; Wen, X. Finite Element Analysis of Electrostatic Coupling in LISA Pathfinder Inertial Sensors. Sensors 2024, 24, 6189. https://doi.org/10.3390/s24196189
Zhang W, Lei J, Wang Z, Li C, Yang S, Min J, Wen X. Finite Element Analysis of Electrostatic Coupling in LISA Pathfinder Inertial Sensors. Sensors. 2024; 24(19):6189. https://doi.org/10.3390/s24196189
Chicago/Turabian StyleZhang, Wenyan, Jungang Lei, Zuolei Wang, Cunhui Li, Shijia Yang, Jian Min, and Xuan Wen. 2024. "Finite Element Analysis of Electrostatic Coupling in LISA Pathfinder Inertial Sensors" Sensors 24, no. 19: 6189. https://doi.org/10.3390/s24196189