
Two Proposals of a Simple Analog Conditioning Circuit for Remote Resistive Sensors with a Three-Wire Connection

Abstract
:1. Introduction
2. Operating Principle
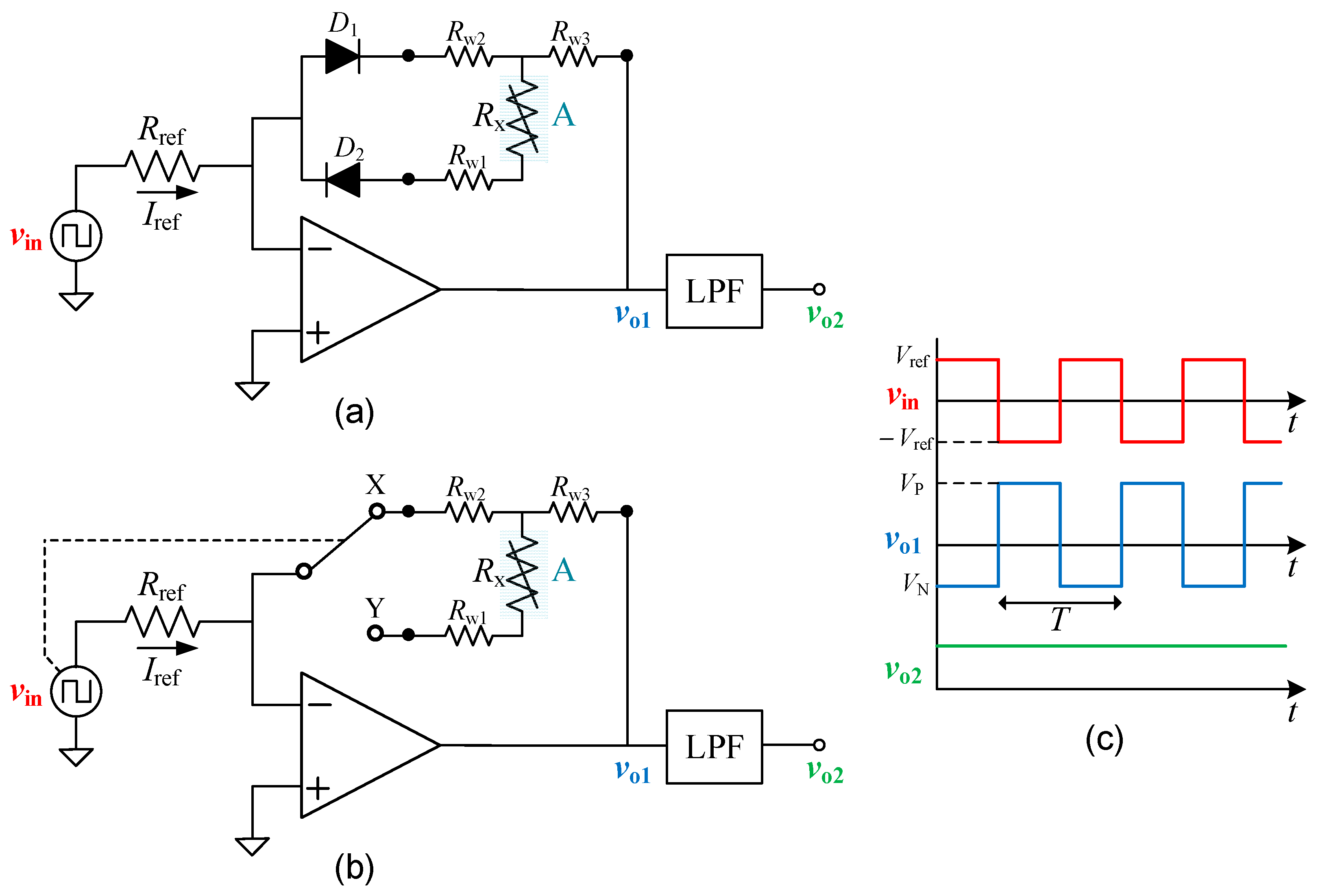
2.1. Diode-Based Circuit
2.2. Switch-Based Circuit
2.3. General Comments
2.4. Analysis of Non-Idealities
3. Materials and Method
- (a)
- Scenario #1, with Rw1 = Rw2 = Rw3 = 0. This is the reference case corresponding to no interconnecting cable between the sensor and the circuit.
- (b)
- Scenario #2, with Rw1 = Rw2 = Rw3 = 3.9 Ω (nominal value). This case corresponds to an interconnecting cable with a length of around 10 m, assuming a parasitic resistance of around 0.4 Ω/m [8]. The actual values of Rw1 and Rw2 were very similar, with a difference of around ±1 mΩ.
- (c)
- Scenario #3, with Rw1 = Rw2 = 3.9 Ω, and Rw3 = 2 Ω. This case emulates a strong mismatch in the resistance of wire #3.
- (d)
- Scenario #4, with Rw1 = Rw3 = 3.9 Ω, and Rw2 = 2 Ω. This case emulates a strong mismatch between the resistances of wires #1 and #2.
4. Experimental Results and Discussion
4.1. Experimental Waveforms
- (a)
- Voltage vin (with a vertical scale of 1 V/div in channel 1, and a horizontal scale of 200 µs/div): This voltage was the same for the three cases represented in Figure 2, as expected, with an amplitude of ±1 V and a period of 500 µs.
- (b)
- Voltage vo1 (with a vertical scale of 100 mV/div in channel 2, and a horizontal scale of 200 µs/div): The amplitude of that voltage in the positive semicycle increased with increasing the sensor resistance, but that in the negative semicycle remained quite constant. This was already predicted by (7) and (6), respectively. The bandwidth of that signal was limited to 100 kHz internally in the oscilloscope to reduce the noise.
- (c)
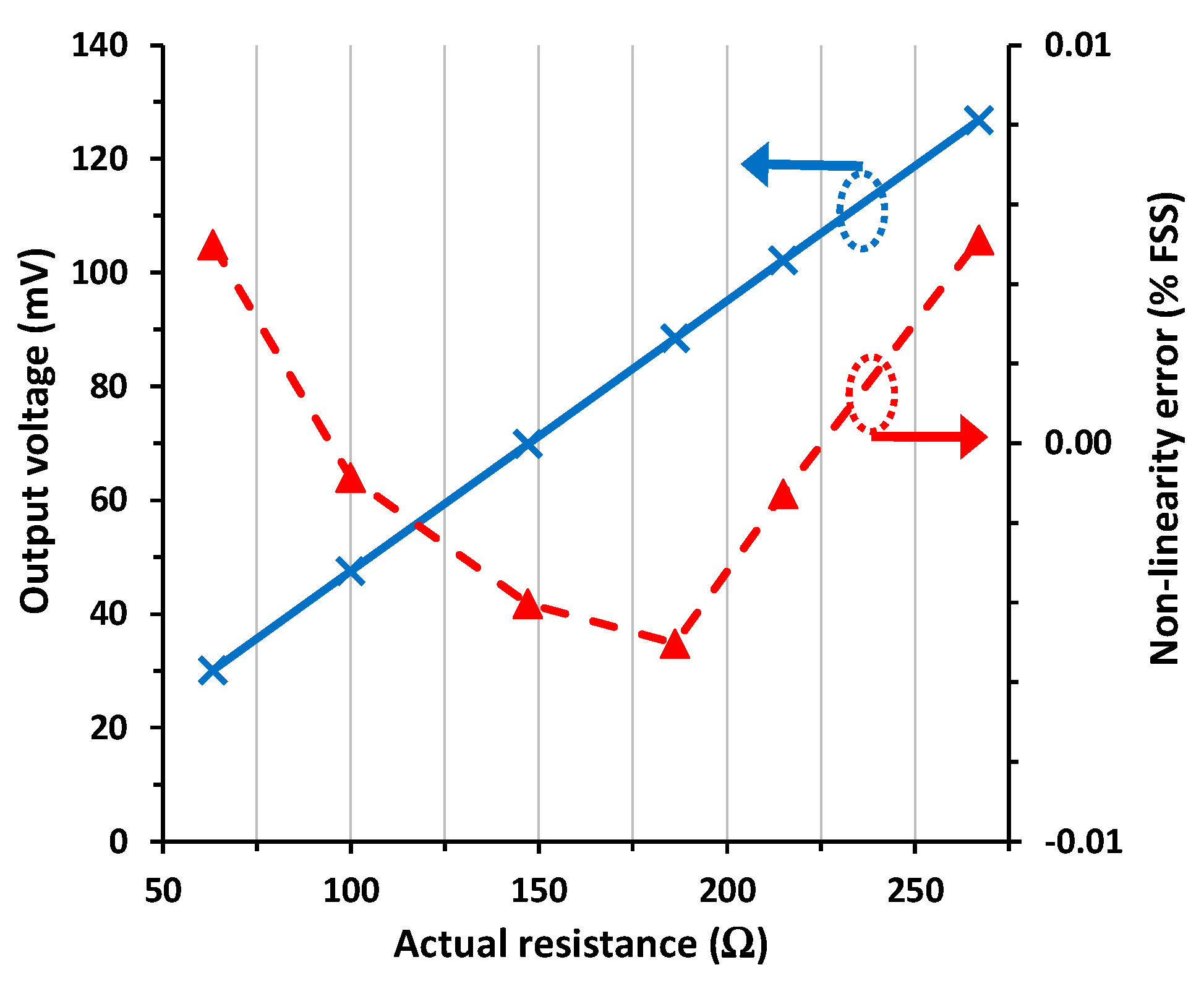
- Voltage vo2 (with a vertical scale of 50 mV/div in channel 3, and a horizontal scale of 200 µs/div): This voltage was a DC signal whose value increased with the sensor resistance, as predicted before by (4). It was around 30, 88, and 127 mV in Figure 2a, Figure 2b, and Figure 2c, respectively. The bandwidth of that signal was also limited to 100 kHz.
4.2. Diode-Based Circuit
4.3. Switch-Based Circuit
4.4. Discussion
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Depari, A.; Bellagente, P.; Ferrari, P.; Flammini, A.; Pasetti, M.; Rinaldi, S.; Sisinni, E. Minimal Wide-Range Resistive Sensor-to-Microcontroller Interface for Versatile IoT Nodes. IEEE Trans. Instrum. Meas. 2022, 71, 9506509. [Google Scholar] [CrossRef]
- Bravo, G.; Silva, J.M.; Noriega, S.A.; Martínez, E.A.; Enríquez, F.J.; Sifuentes, E. A Power-Efficient Sensing Approach for Pulse Wave Palpation-Based Heart Rate Measurement. Sensors 2021, 21, 7549. [Google Scholar] [CrossRef] [PubMed]
- Kapić, A.; Tsirou, A.; Verdini, P.G.; Carrara, S. Robust Analog Multisensory Array System for Lossy Capacitive Sensors over Long Distances. IEEE Trans. Instrum. Meas. 2023, 72, 2000308. [Google Scholar]
- Wilson, D.M. Electronic Interface Circuits for Resistance-Based Sensors. IEEE Sens. J. 2022, 22, 10223–10234. [Google Scholar] [CrossRef]
- Lakshminarayana, S.; Park, Y.; Park, H.; Jung, S. A Readout System for High Speed Interface of Wide Range Chemiresistive Sensor Array. IEEE Access 2022, 10, 45726–45735. [Google Scholar] [CrossRef]
- Hidalgo-López, J.A.; Oballe-Peinado, Ó.; Castellanos-Ramos, J.; Sánchez-Durán, J.A. Two-Capacitor Direct Interface Circuit for Resistive Sensor Measurements. Sensors 2021, 21, 1524. [Google Scholar] [CrossRef] [PubMed]
- Czaja, Z. Simple Measurement Method for Resistive Sensors Based on ADCs of Microcontrollers. IEEE Sens. J. 2023. early access. [Google Scholar] [CrossRef]
- Nagarajan, P.R.; George, B.; Kumar, V.J. Improved Single-Element Resistive Sensor-to-Microcontroller Interface. IEEE Trans. Instrum. Meas. 2017, 66, 2736–2744. [Google Scholar] [CrossRef]
- Rerkratn, A.; Prombut, S.; Kamsri, T.; Riewruja, V.; Petchmaneelumka, W. A Procedure for Precise Determination and Compensation of Lead-Wire Resistance of a Two-Wire Resistance Temperature Detector. Sensors 2022, 22, 4176. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Xiong, S.; Zhou, X. Lead-Wire-Resistance Compensation Technique Using a Single Zener Diode for Two-Wire Resistance Temperature Detectors (RTDs). Sensors 2020, 20, 2742. [Google Scholar] [CrossRef] [PubMed]
- Reverter, F. A front-end circuit for two-wire connected resistive sensors with a wire-resistance compensation. Sensors 2023, 23, 8228. [Google Scholar] [CrossRef] [PubMed]
- Elangovan, K.; Sreekantan, A.C. Evaluation of New Digital Signal Conditioning Techniques for Resistive Sensors in Some Practically Relevant Scenarios. IEEE Trans. Instrum. Meas. 2021, 70, 2004709. [Google Scholar]
- Elangovan, K.; Antony, A.; Sreekantan, A.C. Simplified Digitizing Interface-Architectures for Three-Wire Connected Resistive Sensors: Design and Comprehensive Evaluation. IEEE Trans. Instrum. Meas. 2022, 71, 2000309. [Google Scholar] [CrossRef]
- Mathew, T.; Elangovan, K.; Sreekantan, A.C. Accurate Interface Schemes for Resistance Thermometers with Lead Resistance Compensation. IEEE Trans. Instrum. Meas. 2023, 72, 2005904. [Google Scholar] [CrossRef]
- Reverter, F. A Microcontroller-Based Interface Circuit for Three-Wire Connected Resistive Sensors. IEEE Trans. Instrum. Meas. 2022, 71, 2006704. [Google Scholar] [CrossRef]
- Sen, S.K.; Pan, T.K.; Ghosal, P. An improved lead wire compensation technique for conventional four wire resistance temperature detectors (RTDs). Measurement 2011, 44, 842–846. [Google Scholar] [CrossRef]
- Elangovan, K.; Sreekantan, A.C. An Efficient Digital Readout for Four-Lead Resistance Thermometers. IEEE Sens. Lett. 2023, 7, 6009504. [Google Scholar]
- Pallàs-Areny, R.; Webster, J.G. Sensors and Signal Conditioning; Wiley: Hoboken, NJ, USA, 2001. [Google Scholar]
- Kay, A. RTD to Voltage Reference Design Using Instrumentation Amplifier and Current Reference; Application Note TIDU969; Texas Instruments Incorp.: Dallas, TX, USA, 2015. [Google Scholar]
- Reverter, F. A Tutorial on Thermal Sensors in the 200th Anniversary of the Seebeck Effect. IEEE Sens. J. 2021, 21, 22122–22132. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Circuit Topology | Range (Ω) | Max. NLE | Mismatch Affecting the Output |
|---|---|---|---|---|
| [14] | Two OpAmps, two matched resistors | [80, 200] | 0.24% 1 | A single couple of wire resistances |
| [12] | Comparator, OpAmp, two switches, PGA | [1, 1000] k | 0.09% 2 | A single couple of wire resistances |
| [13] | Comparator, four switches | [80, 150] | 0.09% 3 | Two couples of wire resistances |
| [15] | MCU-based circuit | [60, 264] | 0.03% 1 | A single couple of wire resistances |
| This work | Diode-based circuit | [63, 267] | 0.012% 1 | A single couple of wire resistances |
| This work | Switch-based circuit | [63, 267] | 0.005% 1 | A single couple of wire resistances |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reverter, F. Two Proposals of a Simple Analog Conditioning Circuit for Remote Resistive Sensors with a Three-Wire Connection. Sensors 2024, 24, 422. https://doi.org/10.3390/s24020422
Reverter F. Two Proposals of a Simple Analog Conditioning Circuit for Remote Resistive Sensors with a Three-Wire Connection. Sensors. 2024; 24(2):422. https://doi.org/10.3390/s24020422
Chicago/Turabian StyleReverter, Ferran. 2024. "Two Proposals of a Simple Analog Conditioning Circuit for Remote Resistive Sensors with a Three-Wire Connection" Sensors 24, no. 2: 422. https://doi.org/10.3390/s24020422