
Calibration of Ring Oscillator-Based Integrated Temperature Sensors for Power Management Systems

 , , ,
, , ,  ,
,
Abstract
:1. Introduction
2. Ring Oscillator-Based Temperature Sensor: Design, Implementation, and Evaluation Criteria
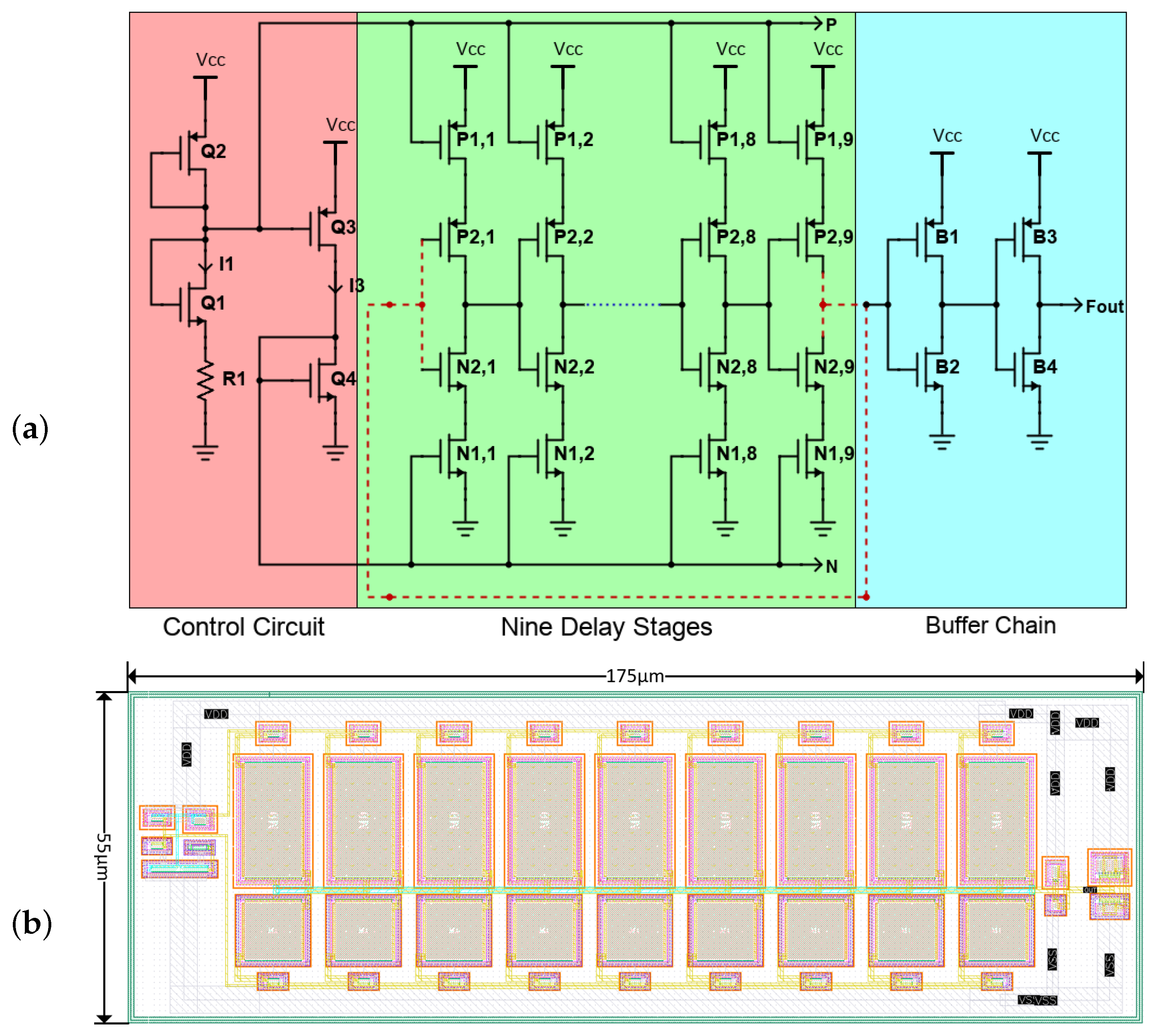
2.1. Design and Implementation
2.2. Evaluation Criteria
2.2.1. One-Point Calibration Method
- Measure the output frequency at a known temperature T1 (ambient, for instance). This single data point forms the foundation of the calibration.
- Use the corner simulation data to follow the curvature of the closest corners, thereby refining the calibration model based on the device’s specific requirements and characteristics.
- Apply the frequency measurement at T1 and the curvature details from the corner cases to obtain the calibrated response.
- To determine the temperature from the measured frequency, one could utilize the inverse of the established relationship between temperature and frequency. If this relationship is mathematically defined, the inverse function can provide the temperature for a given frequency. Alternatively, a lookup table, populated with calibration data, can be used to find the closest frequency values and interpolate between them to retrieve the corresponding temperature.
2.2.2. Two-Point Calibration Method
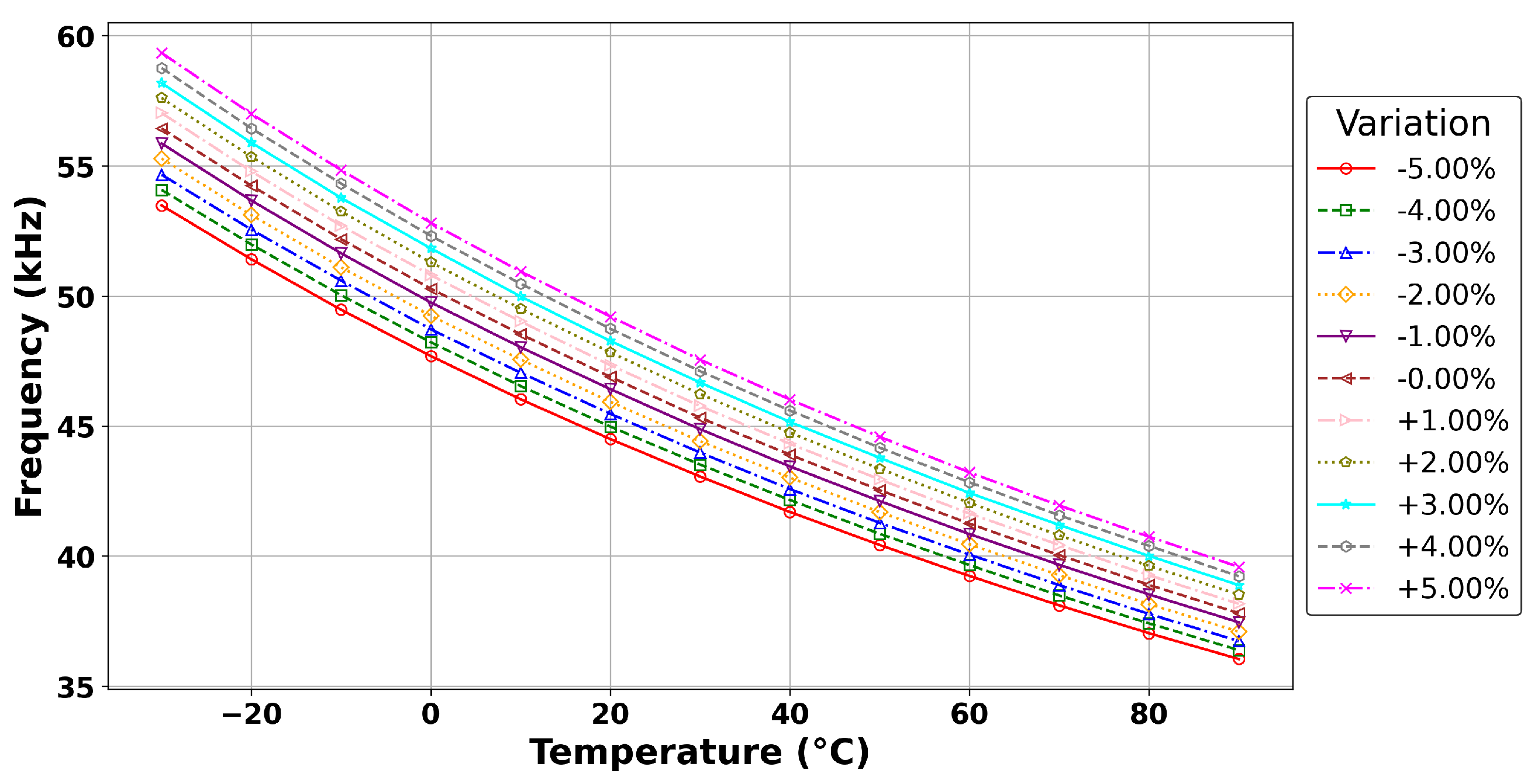
- Measure the output frequency at a known temperature T1 and compare this measurement point with the corner cases from Figure 3. If the measured point does not belong to any curve and lies between two curves, the following weighting equation below is used for interpolation:where is the vertical distance (in frequency) between the calibration point and the nearest upper bound curve, is the vertical distance between the calibration point and the nearest lower bound curve, and , , and represent the interpolated Lagrange second degree polynomial of the calibrated data, lower-bound curve, and upper-bound curve, respectively.
- Repeat the same process for a different calibration point at a known temperature T2 to obtain . For higher accuracy, it is advisable to select sufficiently distant calibration points.
- To force the calibrated response curve to pass through the two calibration points while taking advantage of the chip’s corner simulation, we perform the following linear combination:
2.2.3. Three-Point Calibration Method
- At a low temperature of C, capturing the low-end performance.
- At room temperature, ensuring a central reference point.
- Finally, at a high temperature of C, assessing the high-end performance.
2.2.4. Linear Approach
2.2.5. Second-Degree Polynomial Best Fit Approach
3. Experimental Setup and Measurement Results
3.1. Chip Testbench and Measurements
3.2. Evaluation Criteria
Sensitivity-Based Approach
- Polynomial Fit: To measure the error in the calibrated response, a 6th-degree polynomial was fitted to the measured data to represent as closely as possible the true temperature-frequency relationship.where represents the frequency as a function of temperature T, and are the polynomial coefficients obtained from the data.
- Sensitivity Calculation: The polynomial fitted to the measured data was differentiated to evaluate its sensitivity to temperature changes.where is the sensitivity of frequency to temperature at any given temperature T.
- Error Calculation: The error in frequency at each temperature point was calculated by comparing the fitted 6th-order polynomial’s value to the frequency values predicted by other approaches.
- Temperature Error Using Sensitivity: The temperature error for the given frequency error was calculated using the polynomial sensitivity.Note that the temperature error becomes undefined if the sensitivity is zero at some temperatures.
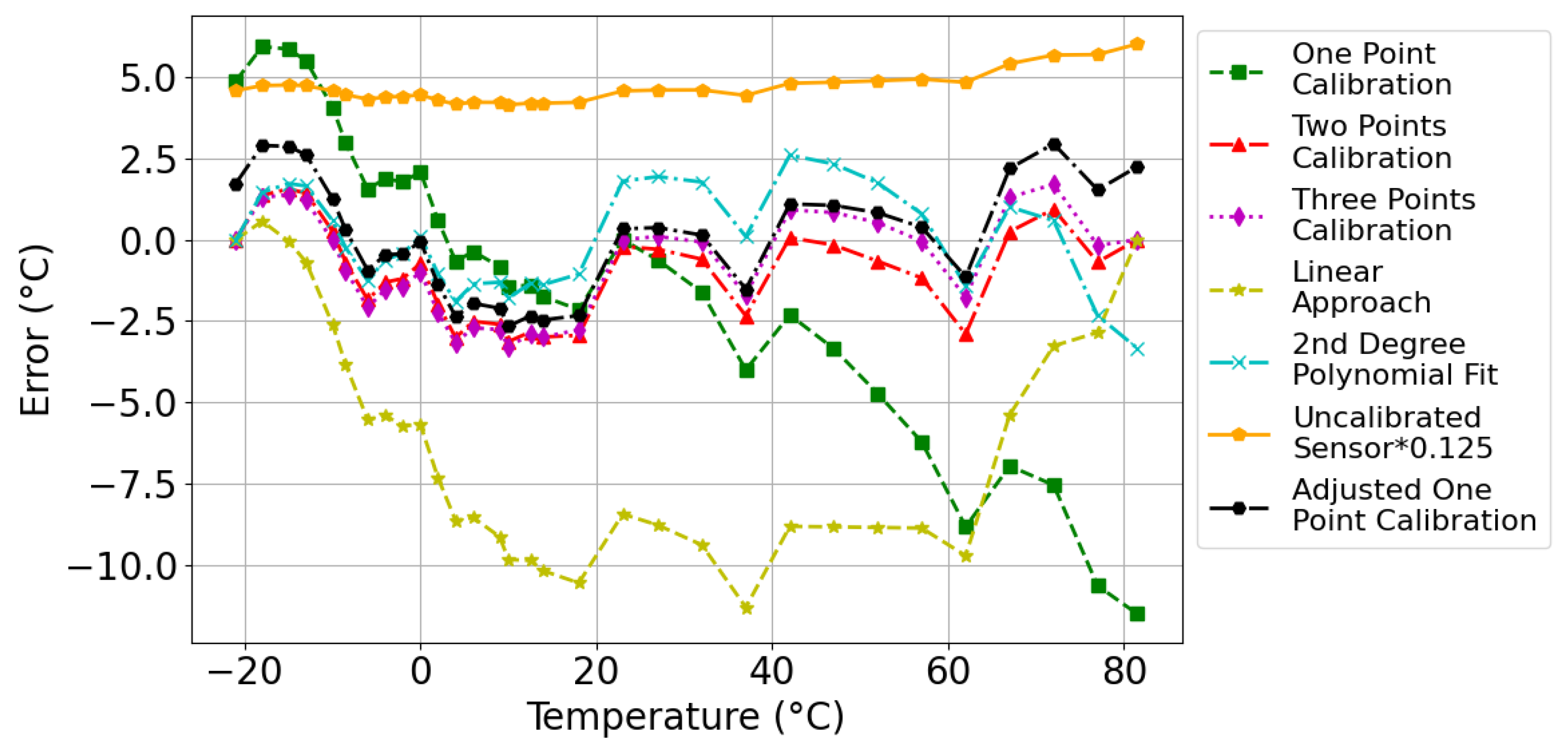
3.3. Fitting and Measurement Results
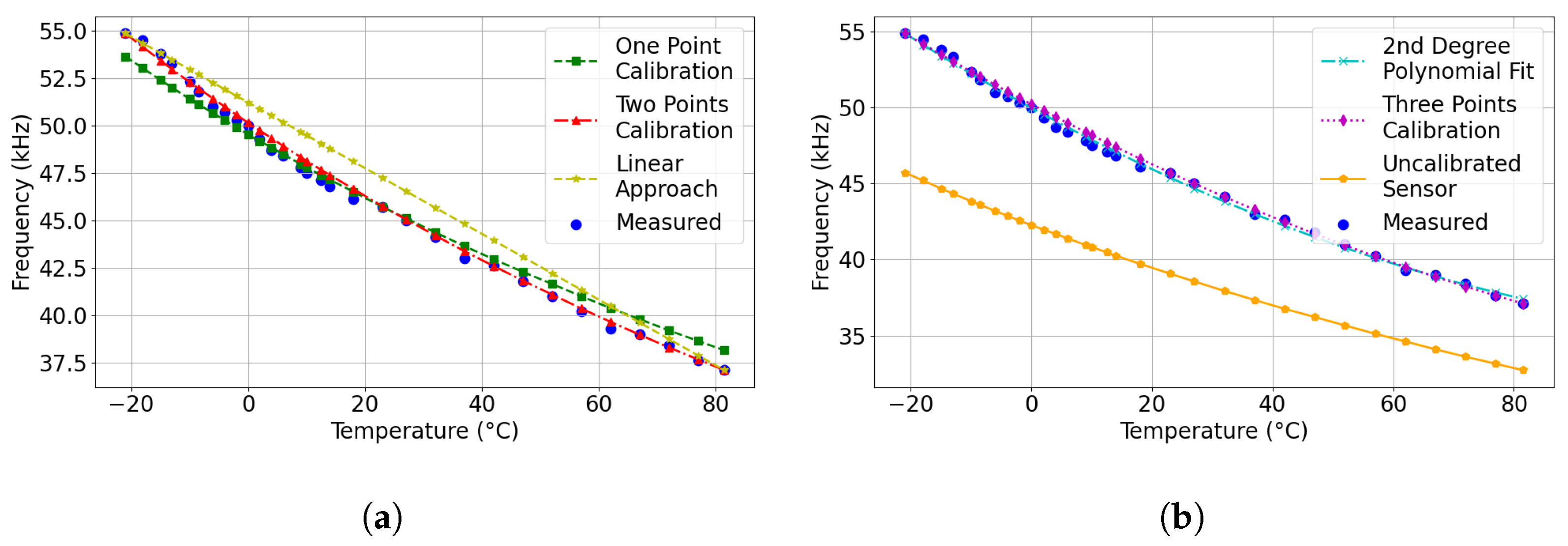
- Three-point calibration: Using frequency measurements at −21 °C, 23 °C, and 81.5 °C.
- Two-point calibration: Using frequency measurements at −21 °C and 81.5 °C.
- Single-point calibration: Relying on a single frequency measurement at 23 °C.
- Linear Calibration: From frequency measurements at −21 °C and 81.5 °C.
- Second-Degree Polynomial Best Fit Approach: This best fit is made using all the recorded temperature-frequency data points (captured at 2.5 °C intervals) to interpolate the relationship.
- Uncalibrated Sensor: The typical process parameters were used to produce an uncalibrated nominal response based on post-layout circuit simulations.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Iradukunda, A.C.; Huitink, D.R.; Luo, F. A review of advanced thermal management solutions and the implications for integration in high-voltage packages. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 256–271. [Google Scholar] [CrossRef]
- Salvi, S.S.; Jain, A. A review of recent research on heat transfer in three-dimensional integrated circuits (3-D ICs). IEEE Trans. Compon. Packag. Manuf. Technol. 2021, 11, 802–821. [Google Scholar] [CrossRef]
- Li, X.; Li, Z.; Zhou, W.; Duan, Z. Accurate on-chip temperature sensing for multicore processors using embedded thermal sensors. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2020, 28, 2328–2341. [Google Scholar] [CrossRef]
- Ruby, R.; Bradley, P.; Larson, J.; Oshmyansky, Y.; Figueredo, D. Ultra-miniature high-Q filters and duplexers using FBAR technology. In Proceedings of the 2001 IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 7 February 2001; Digest of Technical Papers, ISSCC (Cat. No. 01CH37177). pp. 120–121. [Google Scholar]
- Someya, T.; Islam, A.M.; Sakurai, T.; Takamiya, M. An 11-nW CMOS temperature-to-digital converter utilizing sub-threshold current at sub-thermal drain voltage. IEEE J. Solid-State Circ. 2019, 54, 613–622. [Google Scholar] [CrossRef]
- Wang, H.; Mercier, P.P. A 763 pW 230 pJ/conversion fully integrated CMOS temperature-to-digital converter with +0.81 °C/−0.75 °C inaccuracy. IEEE J. Solid-State Circ. 2019, 54, 2281–2290. [Google Scholar] [CrossRef]
- Tewari, S.; Singh, K. Intuitive design of PTAT and CTAT circuits for MOSFET based temperature sensor using Inversion Coefficient based approach. In Proceedings of the 2015 19th International Symposium on VLSI Design and Test, Ahmedabad, India, 26–29 June 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, T.; Kim, S.; Kinget, P.R.; Seok, M. Compact and supply-voltage-scalable temperature sensors for dense on-chip thermal monitoring. IEEE J. Solid-State Circ. 2015, 50, 2773–2785. [Google Scholar] [CrossRef]
- Reverter, F. A Tutorial on Thermal Sensors in the 200th Anniversary of the Seebeck Effect. IEEE Sens. J. 2021, 21, 22122–22132. [Google Scholar] [CrossRef]
- Yang, W.; Jiang, H.; Wang, Z. A 0.0014 mm2, 150 nW CMOS Temperature Sensor with Nonlinearity Characterization and Calibration for the −60 to +40 °C Measurement Range. Sensors 2019, 19, 1777. [Google Scholar] [CrossRef] [PubMed]
- Kim, K.; Lee, H.; Kim, C. 366-kS/s 1.09-nJ 0.0013-mm2 Frequency-to-Digital Converter Based CMOS Temperature Sensor Utilizing Multiphase Clock. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2013, 21, 1950–1954. [Google Scholar] [CrossRef]
- Testi, N.; Xu, Y. A 0.2 nJ/sample 0.01 mm2 ring oscillator based temperature sensor for on-chip thermal management. In Proceedings of the International Symposium on Quality Electronic Design (ISQED), Santa Clara, CA, USA, 4–6 March 2013; pp. 696–702. [Google Scholar] [CrossRef]
- Shenghua, Z.; Nanjian, W. A novel ultra low power temperature sensor for UHF RFID tag chip. In Proceedings of the 2007 IEEE Asian Solid-State Circuits Conference, Jeju, Republic of Korea, 12–14 November 2007; pp. 464–467. [Google Scholar] [CrossRef]
- Kim, C.K.; Kong, B.S.; Lee, C.G.; Jun, Y.H. CMOS temperature sensor with ring oscillator for mobile DRAM self-refresh control. In Proceedings of the 2008 IEEE International Symposium on Circuits and Systems (ISCAS), Seattle, WA, USA, 18–21 May 2008; pp. 3094–3097. [Google Scholar] [CrossRef]
- Park, S.; Min, C.; Cho, S. A 95 nW ring oscillator-based temperature sensor for RFID tags in 0.13 µm CMOS. In Proceedings of the 2009 IEEE International Symposium on Circuits and Systems (ISCAS), Taipei, Taiwan, 24–27 May 2009; pp. 1153–1156. [Google Scholar] [CrossRef]
- Woo, S.S.; Lee, J.H.; Cho, S. A ring oscillator-based temperature sensor for u-healthcare in 0.13 μm cmos. In Proceedings of the 2009 International SoC Design Conference (ISOCC), Busan, Republic of Korea, 22–24 November 2009; pp. 548–551. [Google Scholar] [CrossRef]
- Chen, P.; Chen, S.C.; Shen, Y.S.; Peng, Y.J. All-Digital Time-Domain Smart Temperature Sensor with an Inter-Batch Inaccuracy of −0.7 °C–+0.6 °C after One-Point Calibration. IEEE Trans. Circ. Syst. Regul. Pap. 2011, 58, 913–920. [Google Scholar] [CrossRef]
- Chang, M.H.; Lin, S.Y.; Wu, P.C.; Zakoretska, O.; Chuang, C.T.; Chen, K.N.; Wang, C.C.; Chen, K.H.; Chiu, C.T.; Tong, H.M.; et al. Near-/Sub-Vth process, voltage, and temperature (PVT) sensors with dynamic voltage selection. In Proceedings of the 2013 IEEE International Symposium on Circuits and Systems (ISCAS), Beijing, China, 19–23 May 2013; pp. 133–136. [Google Scholar] [CrossRef]
- Lempel, Y.; Breuer, R.; Shor, J. A 700-μm2, Ring-Oscillator-Based Thermal Sensor in 16-nm FinFET. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2022, 30, 248–252. [Google Scholar] [CrossRef]
- Vinshtok-Melnik, N.; Shor, J. Ultra Miniature 1850 μm2 Ring Oscillator Based Temperature Sensor. IEEE Access 2020, 8, 91415–91423. [Google Scholar] [CrossRef]
- Amer, M.; Abuelnasr, A.; Ragab, A.; Hassan, A.; Ali, M.; Gosselin, B.; Sawan, M.; Savaria, Y. Design and Analysis of Combined Input-Voltage Feedforward and PI Controllers for the Buck Converter. In Proceedings of the 2021 IEEE International Symposium on Circuits and Systems (ISCAS), Daegu, Republic of Korea, 22–28 May 2021; pp. 1–5. [Google Scholar] [CrossRef]
- El-Zarif, N.; Ali, M.; Hassan, A.; Nabavi, M.; Fayomi, C.J.B.; Savaria, Y. A High Efficiency and Fast Response PLL Based Buck Converter: Implementation and Simulation. In Proceedings of the 2020 IEEE 11th Latin American Symposium on Circuits & Systems (LASCAS), San Jose, Costa Rica, 25–28 February 2020; pp. 1–4. [Google Scholar]
- Mohajertehrani, M.; Savaria, Y.; Sawan, M. Harvesting Energy From Aviation Data Lines: Implementation and Experimental Results. IEEE Trans. Circuits Syst. Regul. Pap. 2018, 65, 2048–2057. [Google Scholar] [CrossRef]
- Zhao, X.; Chebli, R.; Sawan, M. A wide tuning range voltage-controlled ring oscillator dedicated to ultrasound transmitter. In Proceedings of the 16th International Conference on Microelectronics, Tunis, Tunisia, 6–8 December 2004; ICM: Hampshire, UK, 2004; pp. 313–316. [Google Scholar] [CrossRef]
- Xfab: XT018. Available online: https://www.xfab.com/xt018 (accessed on 1 December 2021).
- El-Zarif, N.; Ali, M.; Amer, M.; Hassan, A.; Oukaira, A.; Lakhssassi, A.; Fayomi, C.J.B.; Savaria, Y. Investigation of Different Integrated Temperature Monitoring Sensors for High-Voltage SoC DC-DC Converters. In Proceedings of the 2022 20th IEEE Interregional NEWCAS Conference (NEWCAS), Quebec City, QC, Canada, 19–22 June 2022; pp. 178–182. [Google Scholar] [CrossRef]
- Draper, N.R.; Smith, H. Applied Regression Analysis; Wiley-Interscience: Hoboken, NJ, USA, 1998. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Ring Oscillator Topology | Calibration Method | Accuracy |
|---|---|---|---|
| [11] | two ring oscillators and a subtractor | one trimming point | [−2.9 °C, 2.7 °C] |
| [12] | ring oscillator, biased by PTAT, sink resistor | two trimming points | ±3 °C |
| [13] | RS register | resistor trimming, 5-bit | ±1 °C |
| [14] | current-controlled | N/A | 0.7 °C / bit |
| [15] | current-starved, digital control | output capacitor trimming, 4-bit | 0.4 °C / bit |
| [16] | current-starved, digital control | N/A | 0.18 °C / bit |
| [17] | delay line | digital comparator and time amplifier | ±0.7 °C |
| [18] | parallel ring oscillators | zero temperature coefficient ring oscillator and voltage mapping | [−1.76 °C, 1.96 °C] |
| [19] | current-controlled oscillator | resistor trimming, two points | ±1.5 °C |
| [20] | two ring oscillators, bandgap concept | two trimming points | [−1.7 °C, 2.1 °C] |
| Transistor Name | Total Width | Total Length | Transistor Name | Total Width | Total Length |
|---|---|---|---|---|---|
| 220 nm | 10 m | 220 nm | 2 m | ||
| 1.1 m | 2 m | 440 nm | 2 m | ||
| 440 nm | 2 m | 20 m | 10 m | ||
| 220 nm | 2 m | 2 m | 500 nm | ||
| 10 m | 10 m | 1 m | 500 nm | ||
| 8 m | 500 nm | 4 m | 500 n |
| References | Method | CMOS Technology | Max Positive Error (°C)|Corresponding Temp. (°C) | Max Negative Error (°C)|Corresponding Temp. (°C) | |
|---|---|---|---|---|---|
| This Work | Uncalibrated | Xfab180 nm | −0.736 | +48.12|+81.5 | N/A|N/A |
| This Work | 2nd Degree Polynomial Fit | Xfab180 nm | 0.9975 | +2.59|+42 | −3.33|+81.5 |
| This Work | 3-Point Calibration | Xfab180 nm | 0.9956 | +1.70|+72 | −3.29|+10 |
| This Work | 2-Point Calibration | Xfab180 nm | 0.9958 | +1.56|−15 | −3.13|+10 |
| This Work | Linear Fit | Xfab180 nm | 0.9364 | +0.57|−18 | −11.30|+37 |
| This Work | 1-Point Calibration | Xfab180 nm | 0.9808 | +5.94|−18 | −11.50|+81.5 |
| This Work | Corrected 1-Point Calibration | Xfab180 nm | 0.9957 | +2.95|+72 | −2.66|+10 |
| [11] | Ring oscillator: Trimming 1-point | TSCM65 nm | N/A | +3.00|100 | −3.00|+20 |
| [12] | Ring oscillator: Trimming 2-point | TSCM65 nm | N/A | +2.60|+80 | −3.40|+60 |
| [18] | ROTS: Trimming 2-point | TSMC180 nm | N/A | +2.00|−25 | −1.60|+25 |
| [17] | Delay Line: Trimming 2-point | TSCM65 nm | N/A | +1.00|0 | −0.80|+35 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El-Zarif, N.; Amer, M.; Ali, M.; Hassan, A.; Oukaira, A.; Fayomi, C.J.B.; Savaria, Y. Calibration of Ring Oscillator-Based Integrated Temperature Sensors for Power Management Systems. Sensors 2024, 24, 440. https://doi.org/10.3390/s24020440
El-Zarif N, Amer M, Ali M, Hassan A, Oukaira A, Fayomi CJB, Savaria Y. Calibration of Ring Oscillator-Based Integrated Temperature Sensors for Power Management Systems. Sensors. 2024; 24(2):440. https://doi.org/10.3390/s24020440
Chicago/Turabian StyleEl-Zarif, Nader, Mostafa Amer, Mohamed Ali, Ahmad Hassan, Aziz Oukaira, Christian Jesus B. Fayomi, and Yvon Savaria. 2024. "Calibration of Ring Oscillator-Based Integrated Temperature Sensors for Power Management Systems" Sensors 24, no. 2: 440. https://doi.org/10.3390/s24020440