2.1. Errors in CNS Performance
This study’s UAV and manned aircraft flight activities are conducted under performance-based navigation. The positional accuracy error primarily hinges on the CNS performance parameters, encompassing three components: RNP (Required Navigation Performance), RCP (Required Communication Performance), and RSP (Required Surveillance Performance).
The specific values for these parameters are available in Document 9613 [
33], issued by the International Civil Aviation Organization (ICAO).
Let us denote “” as the parameter value for RNP. represents positioning errors due to navigation performance.
Based on the definition of RNP “
” in
Table 1, RNP signifies that there is a 95% probability that an aircraft’s navigation accuracy will be within “
” nautical mile of its designated flight path [
34]. From this, we can derive the following definition:
Let “” represent the parameter value for RCP; “” stands for positioning error due to communication performance; and “” is the component of the cruising speed of the aircraft on the line connecting the two aircraft.
According to
Table 2, this parameter reflects the maximum processing time, completed in 95% of instances, and is recognized as the operationally acceptable performance, as evidenced by controllers and pilots [
35]. Consequently, we deduce the following:
Let “” be the parameter value for RSP. represents the localization error due to the surveillance performance, and “” is the component of the cruise speed of the aircraft on the line connecting the two aircraft.
As outlined in
Table 3, the accuracy of RSP is determined by the radius of the circle around the target location, indicating a 95% probability that the actual target location falls within this circle. From this, we derive the following conclusion:
The following can be found by using the above Equations (1)–(3):
Therefore, by Equation (4), it follows that
where “
” is the component of the cruising speed of the aircraft on the line connecting the two aircraft; and
,
, and
denote the localization errors due to navigation, communication, and surveillance performance, respectively. “
”, “
”, and “
” are the values of the RNP, RCP, and RSP parameters, respectively.
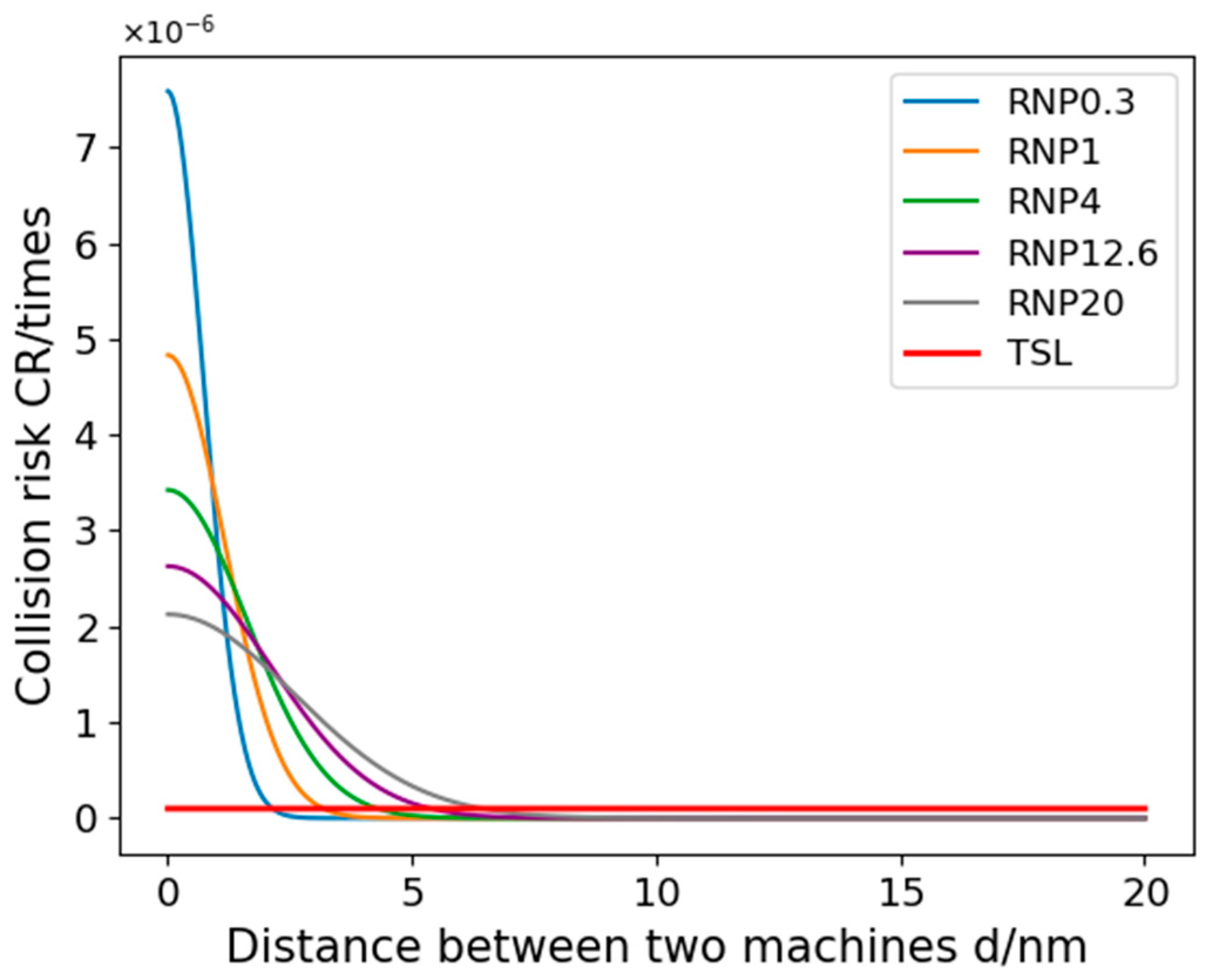
CNS was employed to assess the localization errors induced by both UAVs and manned aircraft. Considering the specific conditions of communication, navigation, and surveillance equipment at Zigong Airport, we opted for RNP1, RCP10, and RSP1 to visualize and analyze the errors; the results are shown in
Figure 1,
Figure 2 and
Figure 3:
In
Figure 1,
Figure 2 and
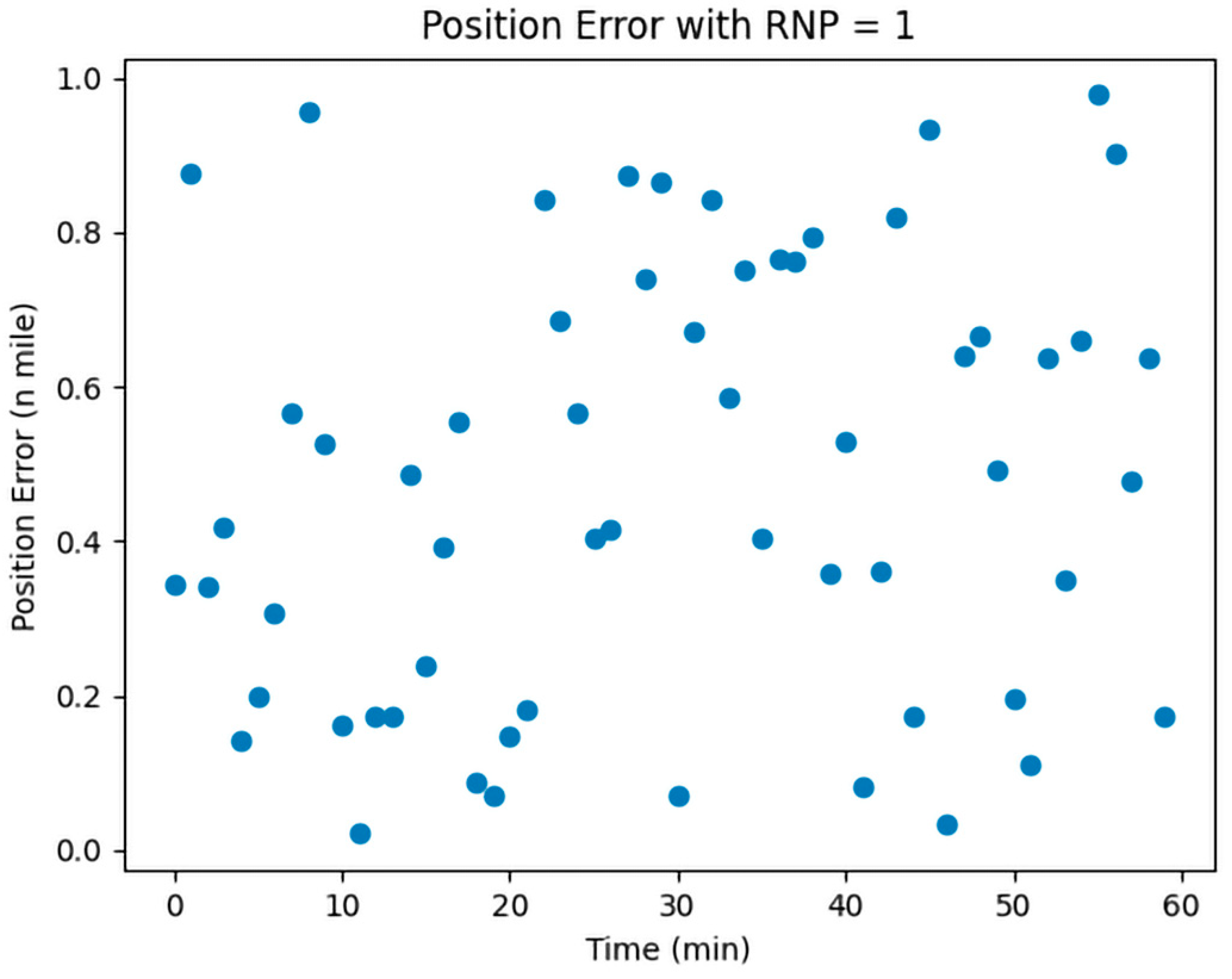
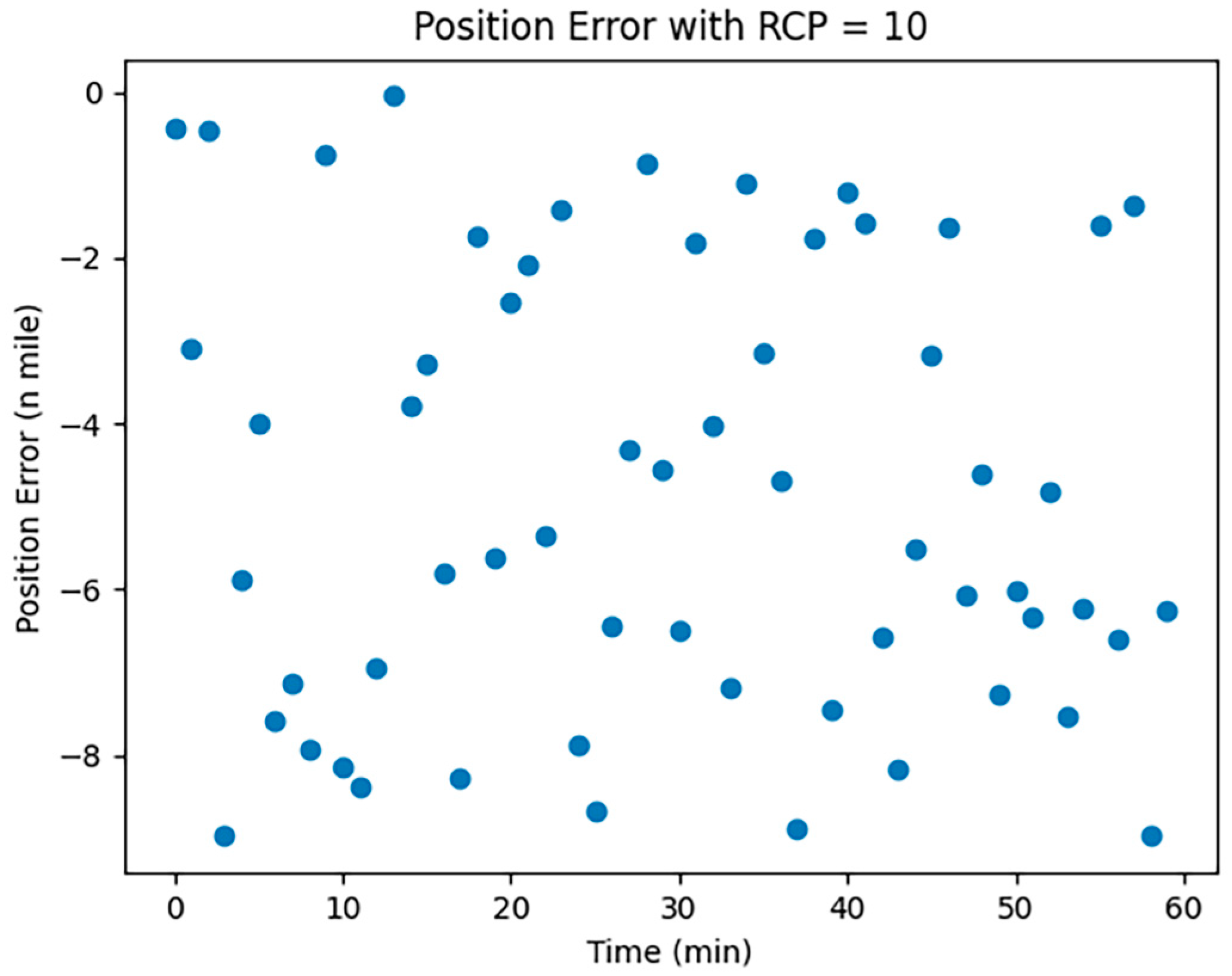
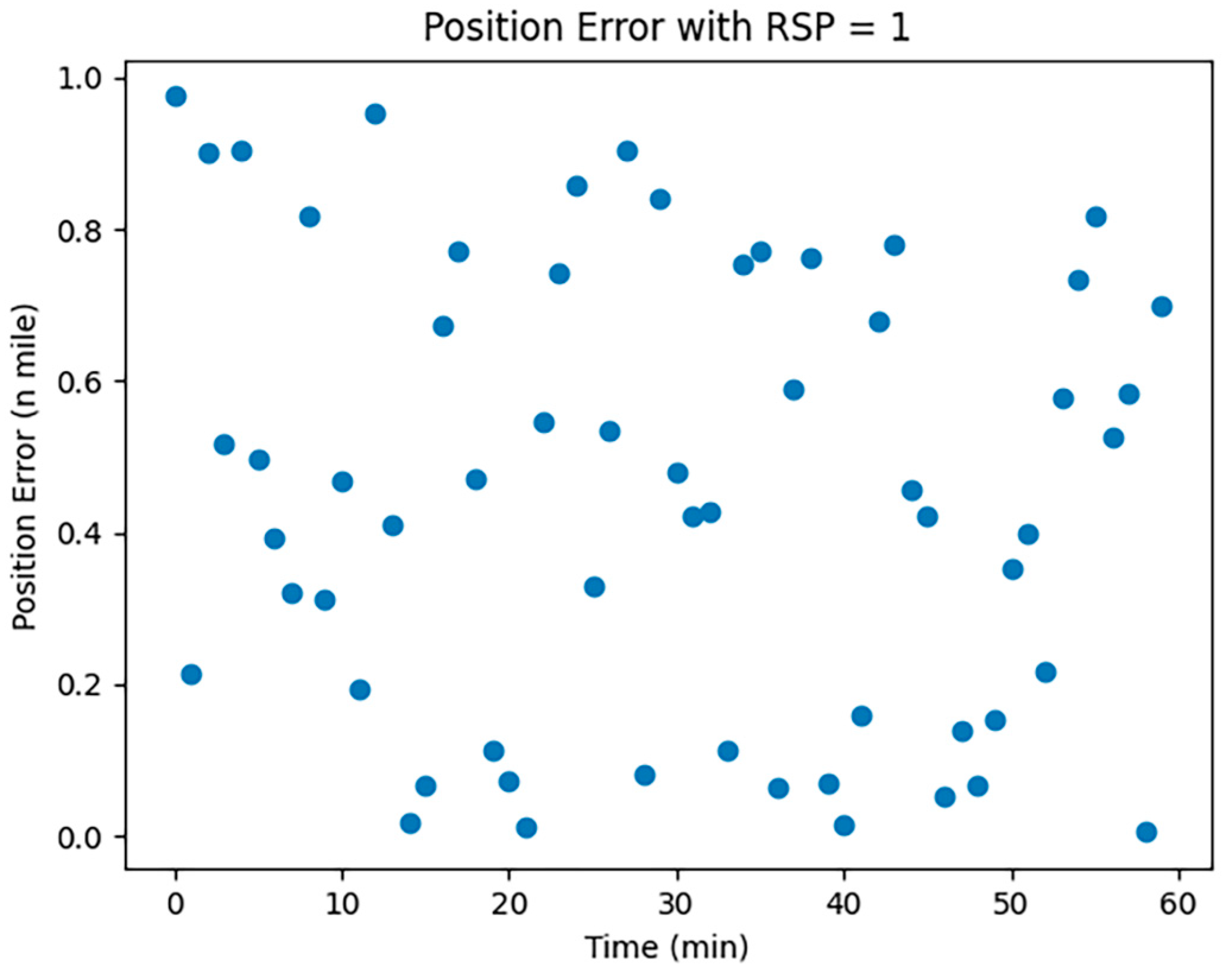
Figure 3, the horizontal coordinates represent the time required in minutes, and the vertical coordinates represent the position error in nautical miles.
The Required Navigation Performance (RNP) is set at a value of 1.
Figure 1 illustrates the simulated effect of localization errors, which, over time, show significant instability and randomness without accumulating. This is attributed to RNP’s utilization of advanced navigation equipment and techniques, enabling real-time position monitoring and error correction, thus preventing error accumulation. RNP employs GPS, inertial navigation, and ground radar for multiple position corrections to ensure route accuracy.
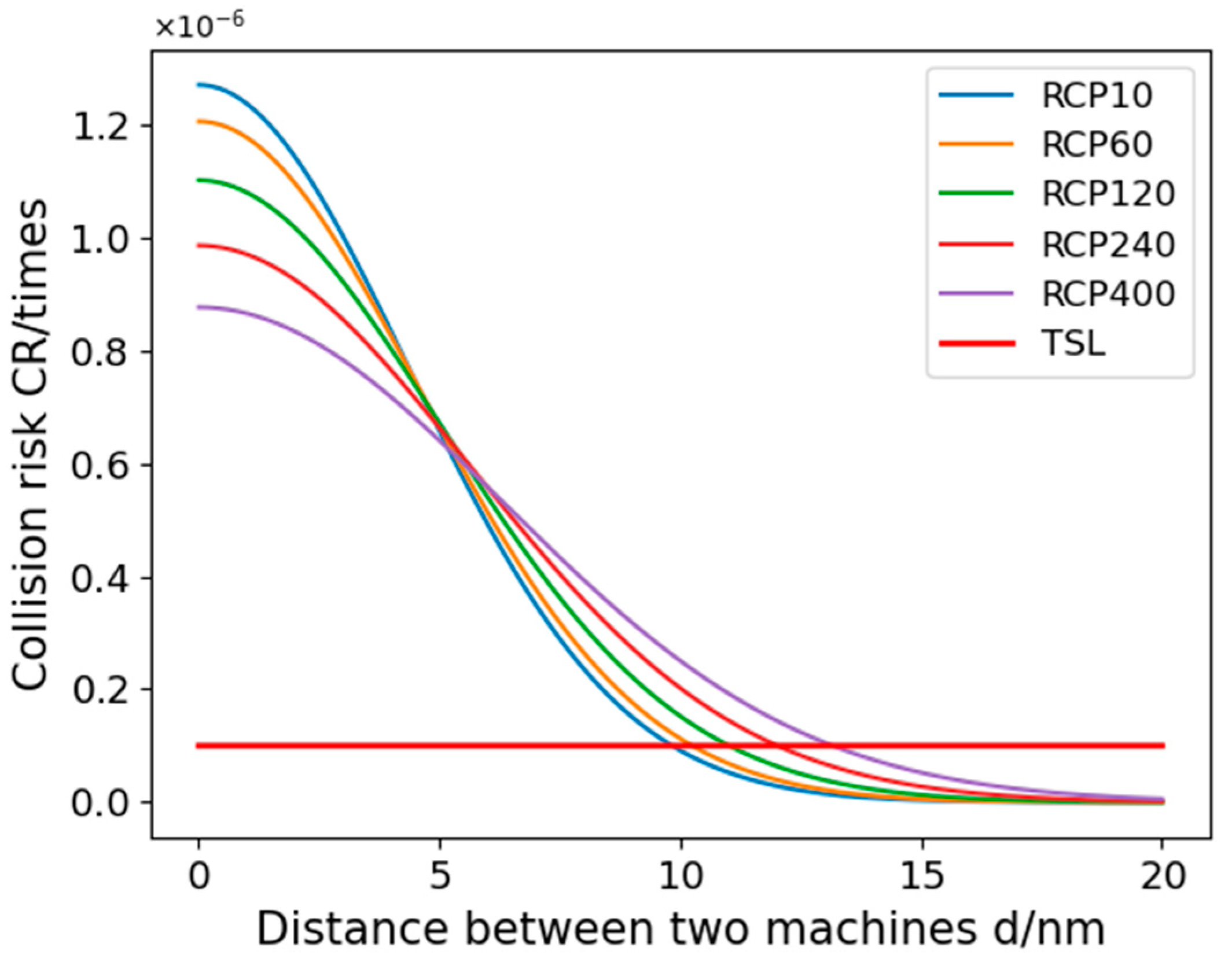
The Required Communication Performance (RCP), with a value of 10, is depicted in
Figure 2. RCP-related localization errors tend to be unstable and random, lacking cumulative effect and are influenced by factors like communication disruptions, course deviations, speed changes, timing, and program errors.
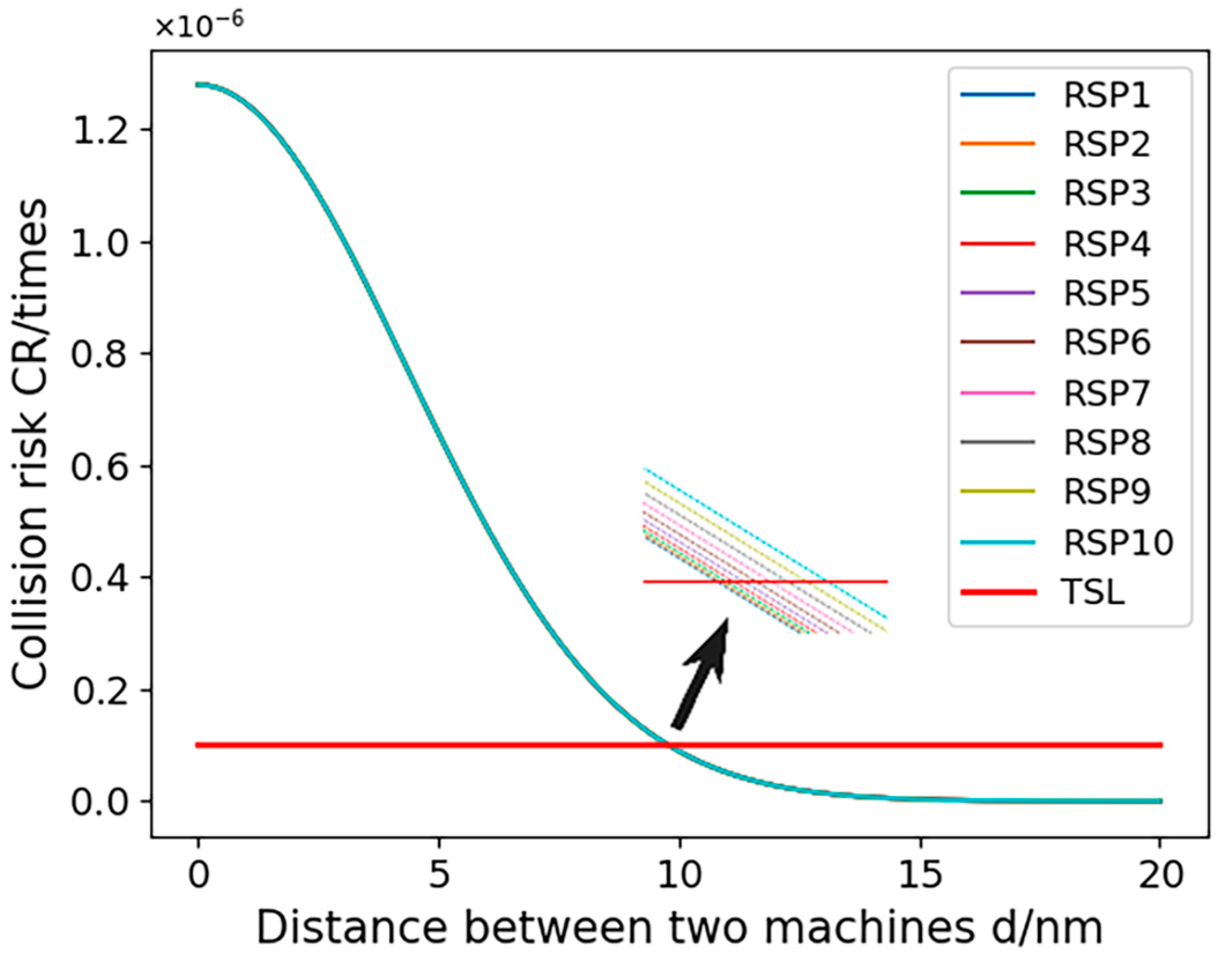
The Required Surveillance Performance (RSP), valued at 1, is shown in
Figure 3. Similarly, RSP-induced positioning errors display instability and randomness over time without accumulating. These errors may arise from monitoring signals, course deviations, speed changes, timing errors, and program glitches.
The simulation results indicate that CNS performance significantly impacts aircraft positioning errors, crucially affecting the minimum safe spacing in UAV-manned aircraft fusion operations.
2.2. Errors in Other Factors
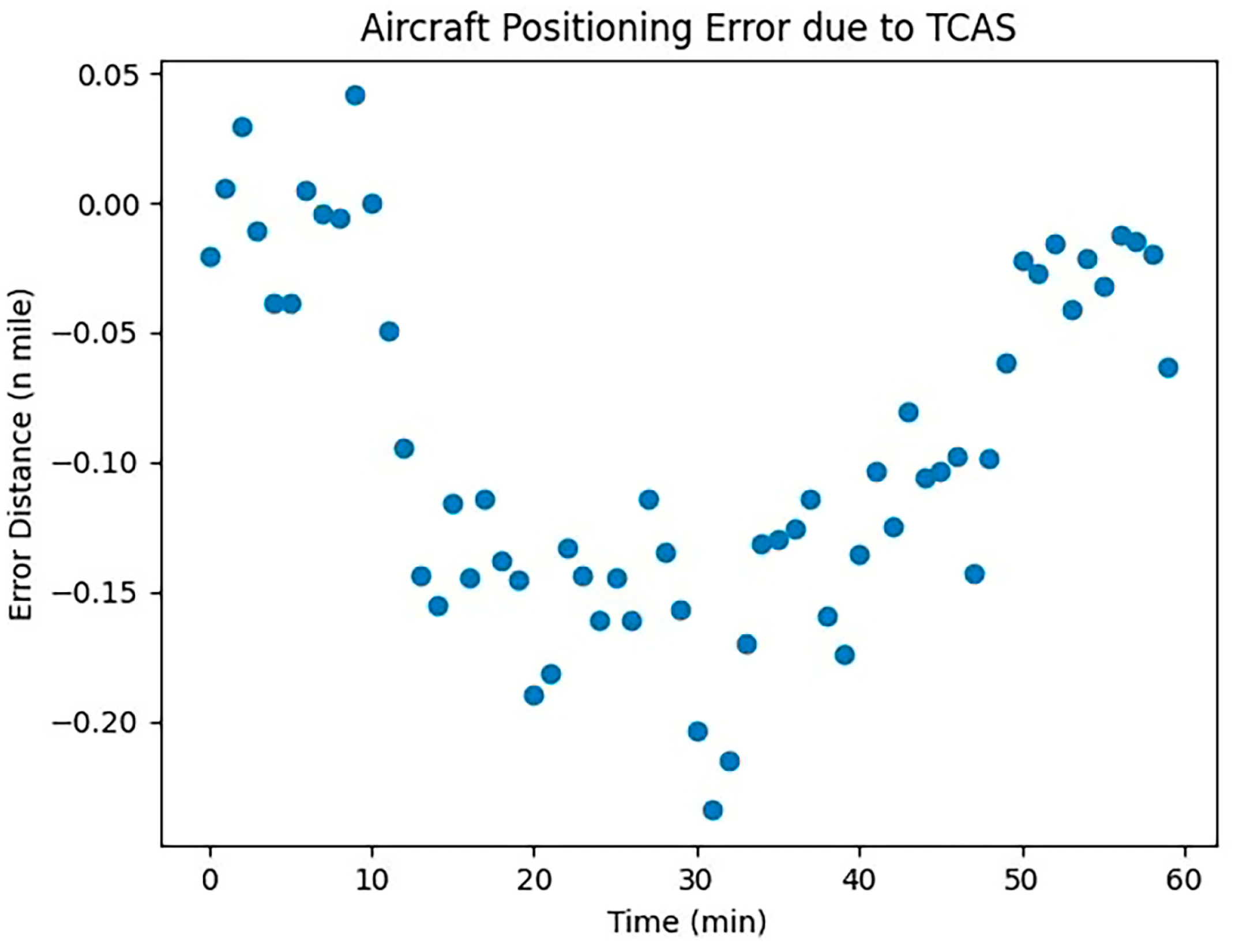
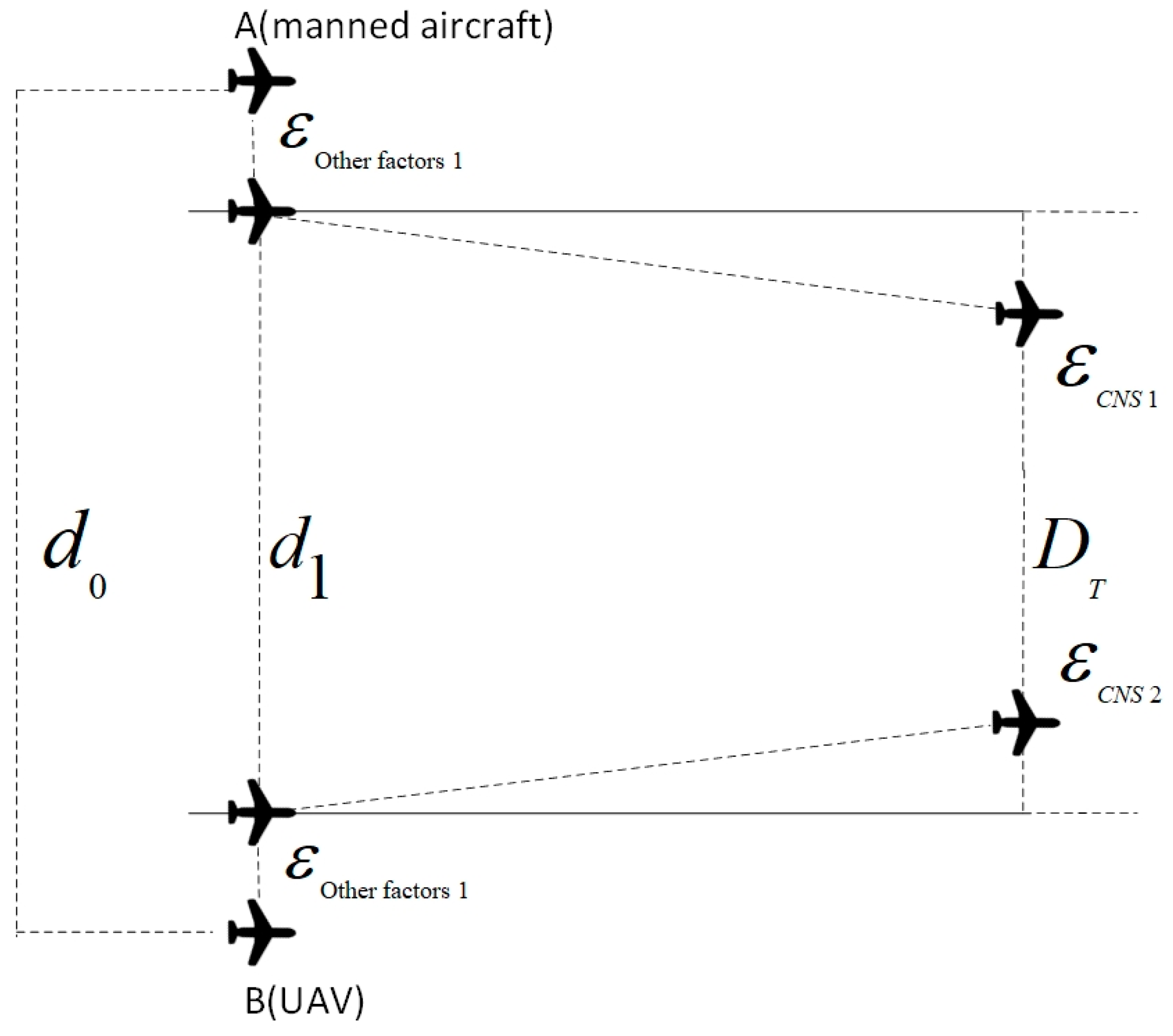
The horizontal positioning error between aircraft during TCAS conflict resolution can be calculated using the following equation:
where
denotes the horizontal positioning error;
is the horizontal distance between two aircraft; and
indicates the trajectory angle error, which refers to the deviation between the aircraft’s actual trajectory and the theoretical trajectory, and can be calculated using the following formula: trajectory angle error is equal to the difference between the actual trajectory angle and the theoretical trajectory angle.
The actual trajectory angle is the angle between the actual direction of flight of the aircraft and due north, and can be expressed in mathematical notation as ; the theoretical track angle is the angle between the direction in which the aircraft should be flying and due north, and can be expressed in mathematical notation as .
Therefore, the trajectory angle error can be expressed by the following equation:
The horizontal positioning error can be expressed by the following equation:
Aircraft positioning errors caused by the influence of human factors (including land and air call delays and human cognitive reliability) can be expressed by the following mathematical formula:
where
,
,
, and
denote the errors due to aircraft localization errors, errors due to land–air call delays, errors due to human cognitive reliability, and errors due to other factors, respectively.
Specifically, the error due to land and air call delays can be calculated using the following formula:
where
and
denote the speed of aircraft operation and the time of land–air call delay, respectively.
The error due to human cognitive reliability can be calculated using the following equation:
where
denotes a constant to regulate the effect of human cognitive reliability on the error, and
denotes human cognitive reliability and takes values ranging from 0 to 1.
The error due to other factors can be calculated using the following formula:
where
,
,
, and
denote constants used to regulate the effect of other factors on the error, distance error, velocity error, and indicated acceleration error, respectively.
In summary, the horizontal positioning error of an aircraft caused by human factors can be expressed as
The impact of meteorological conditions on positioning errors is multifaceted, involving various factors. Predominantly, changes in the atmospheric refractive index significantly affect positioning accuracy by altering the speed and direction of signal transmission. These changes are influenced by atmospheric conditions like temperature, humidity, and pressure. The corresponding atmospheric refraction error can be quantified using a specific formula, which takes into account these meteorological parameters:
where
denotes the atmospheric refractive index error,
is the atmospheric refractive index, and
is the distance on the flight path of the aircraft. Since the atmospheric refractive index is related to temperature, humidity, and other factors, it is necessary to consider the influence of these factors on the atmospheric refractive index.
The atmospheric refractive index can be calculated using the following formula:
where
is the atmospheric pressure,
is the temperature,
is the relative humidity, and
is the wavelength of light.
Meteorological conditions can impact the distance and strength of signal transmission, consequently affecting positioning accuracy. These variations can be measured by factors like atmospheric transparency and water vapor content. The signal transmission error, which reflects the impact of these variations on an aircraft’s positioning error, can be calculated using a specific formula that considers these meteorological influences:
where
denotes the signal transmission error,
is the transmit power,
is the receive power,
is the signal transmission distance, and
is a constant.
The transmit power and receive power can be calculated using the following equations:
where
is the transmit antenna gain,
is the transmitter output power,
is the receive antenna gain, and
is the signal wavelength. Variations in signal transmission distance and strength may be affected by a variety of factors, such as weather, terrain, obstacles, etc. Therefore,
is a constant to account for the effect of these factors on signal transmission.
The thickness and density of the atmosphere influence the signal’s transmission path and speed, subsequently affecting positioning accuracy. These atmospheric properties are determined by factors like temperature and pressure. The atmospheric error, which accounts for the impact of atmospheric thickness and density on aircraft positioning errors, can be calculated using the following formula:
where
denotes the atmospheric error,
is the drag coefficient of the aircraft,
is the atmospheric density,
is the speed of the aircraft, and
is the reference area of the aircraft.
Atmospheric density can be calculated using the following formula:
where
is the atmospheric density at sea level,
is the altitude of the aircraft, and
is the thickness of the atmosphere.
Effect of wind: Wind in the air can cause an aircraft to deviate from its intended trajectory, resulting in a positioning error. Wind error is the effect of wind on the positioning error of an aircraft and can be calculated using the following formula:
where
is the wind speed, and
is the angle between the wind direction and the heading.
The aforementioned factors influencing positioning accuracy can be analyzed and quantified using meteorological observation data and measurements from positioning systems. Understanding the extent of meteorological conditions’ impact on positioning errors allows for the development of targeted measures to enhance positioning accuracy.
Positioning errors caused by meteorological conditions can be synthesized as follows:
The error caused by the above factors all satisfy the normal distribution law and have randomness; therefore, it is the positioning error caused by UAVs and manned aircraft. We carried out the visual analysis of the error, and the results are shown below.
Data from
Figure 4,
Figure 5 and
Figure 6 indicate that the positioning error attributable to collision avoidance equipment gradually increases over time. This trend highlights the varying impact of equipment quality on aircraft, underscoring the need for systematic analysis in future research. Positioning errors due to human factors exhibit significant randomness, reflecting the inherent uncertainties in human cognitive reliability and their influence on aircraft positioning. This randomness mirrors real-world scenarios. Conversely, positioning errors caused by meteorological conditions display a stable pattern consistent with empirical observations. Given the substantial impact of meteorological conditions on aircraft in flight, they warrant focused attention in subsequent research.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}