
A Novel Method of Bridge Deflection Prediction Using Probabilistic Deep Learning and Measured Data


 and
and
Abstract
:1. Introduction
- (1)
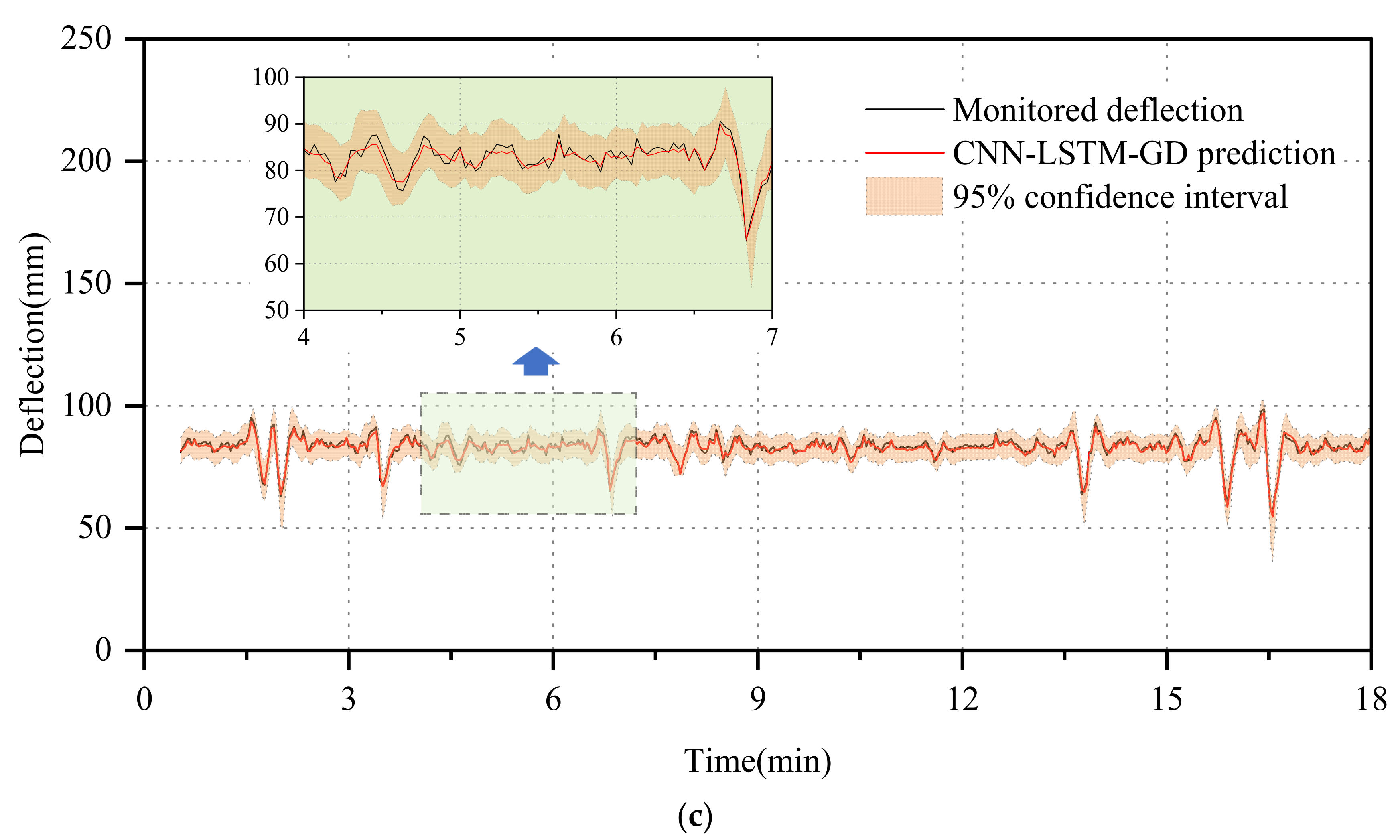
- To address the uncertainties present in deflection monitoring data, a deflection interval prediction model based on the CNN-LSTM-GD model is proposed. This method not only provides deterministic deflection predictions but also quantifies uncertainty, yielding different confidence intervals. It is applicable for studying the complex nonlinear relationships between deflection, vehicle load, and temperature.
- (2)
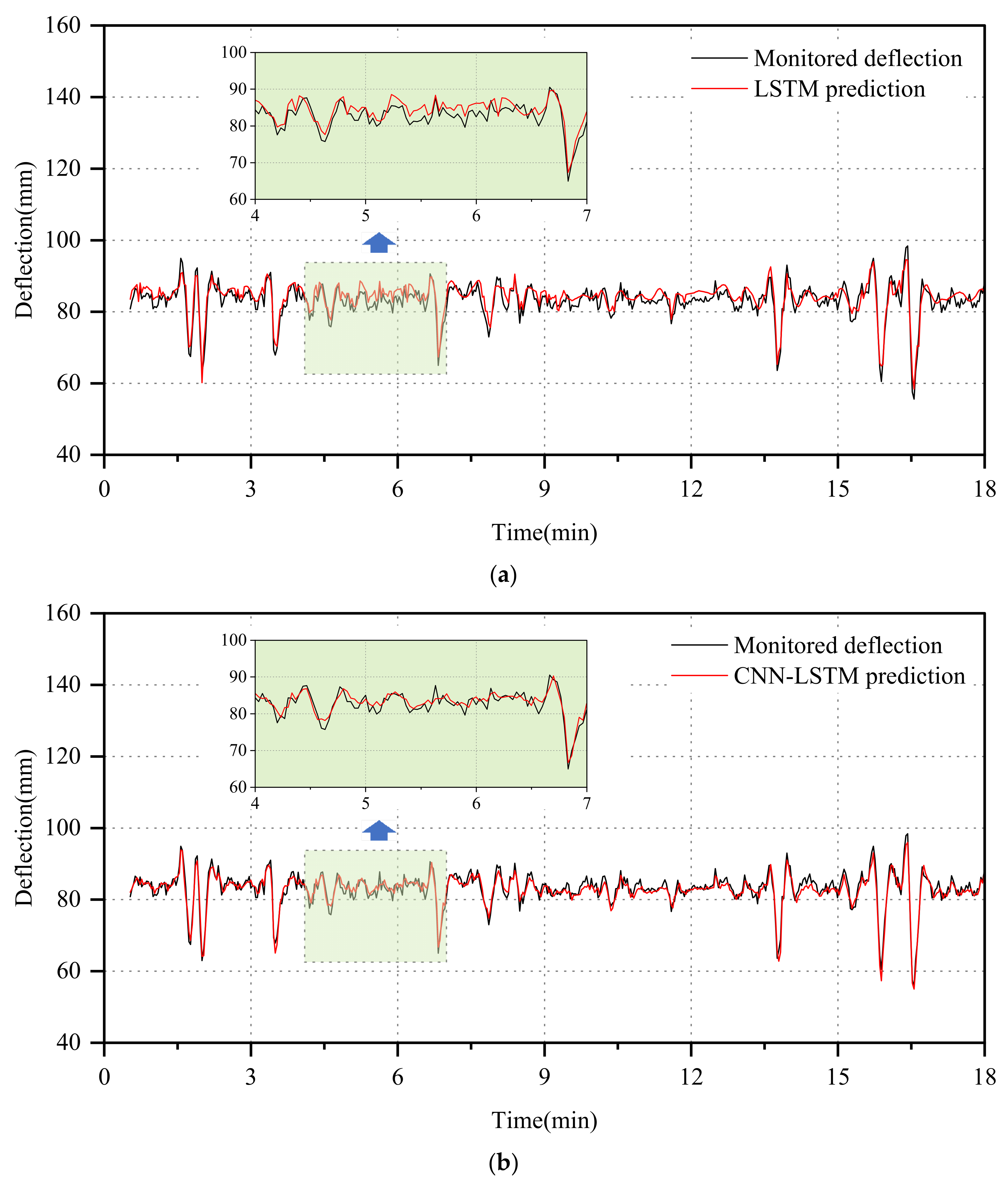
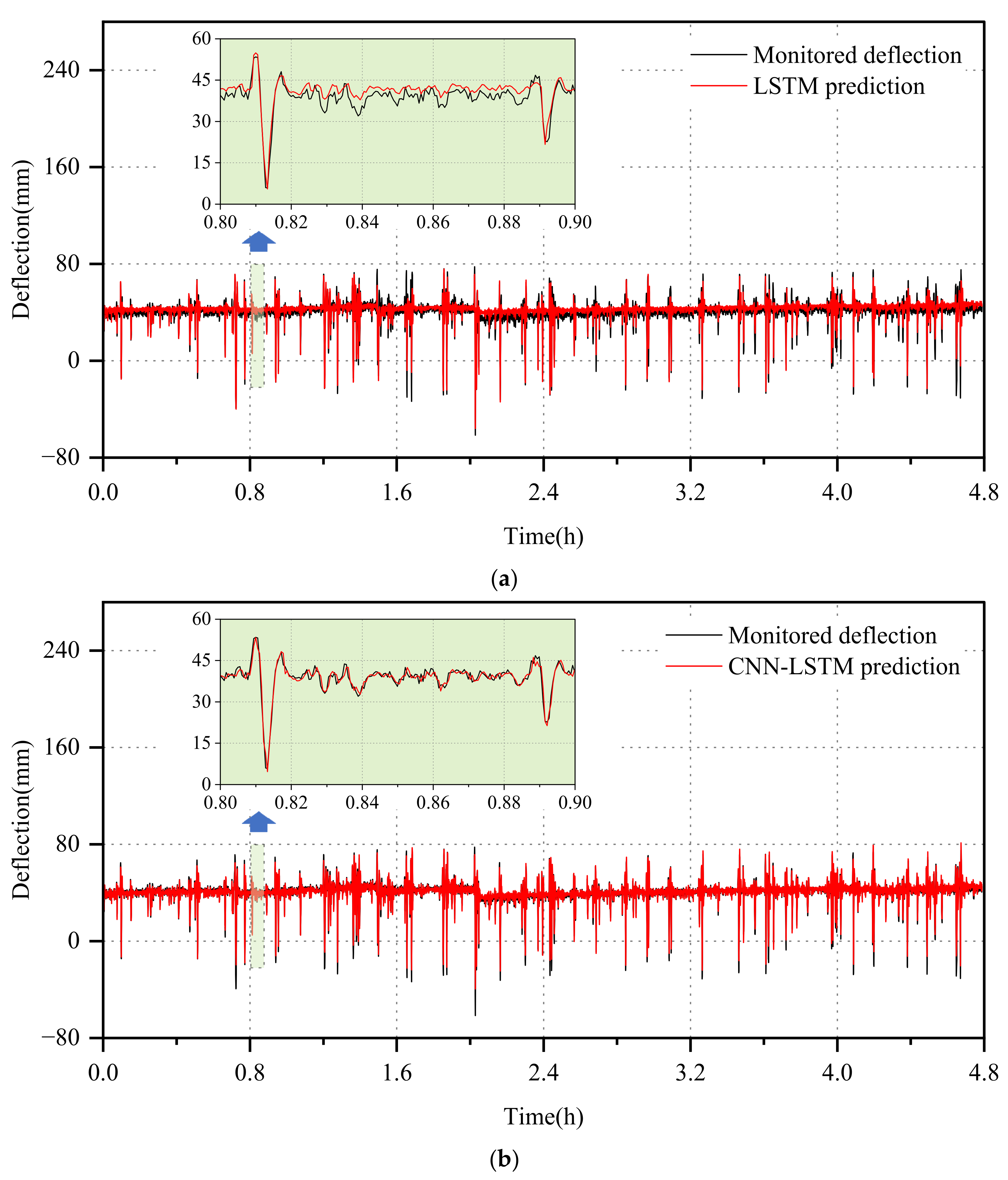
- The performance of the CNN-LSTM-GD model is tested across different time scales, and a comparative study with CNN-LSTM and LSTM models reveals that the CNN-LSTM-GD model exhibits superior prediction capability, particularly for small deflection fluctuations and extreme deflection events.
- (3)
- Based on the uncertainty intervals output from the probabilistic model, two early warning mechanisms are devised, establishing deflection warning thresholds. Compared with conventional statistical analysis methods and finite element methods, this approach is more convenient and efficient, allowing for the timely assessment of bridge safety conditions.
2. Deflection Prediction Model Based on Probabilistic Deep Learning
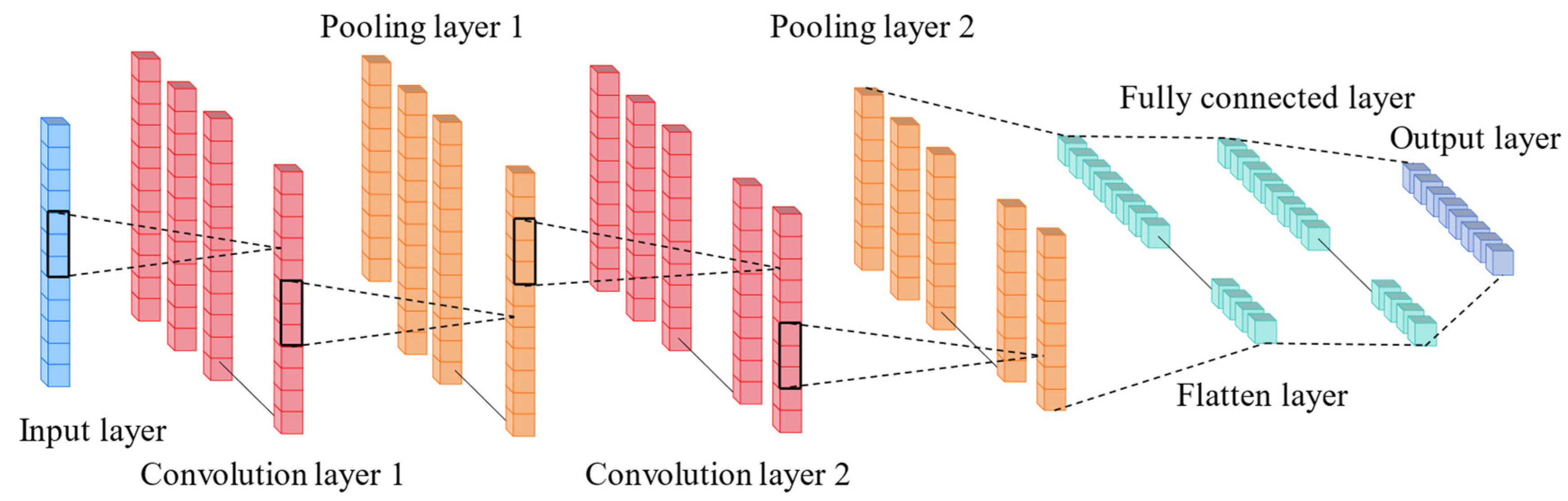
2.1. Convolutional Neural Network
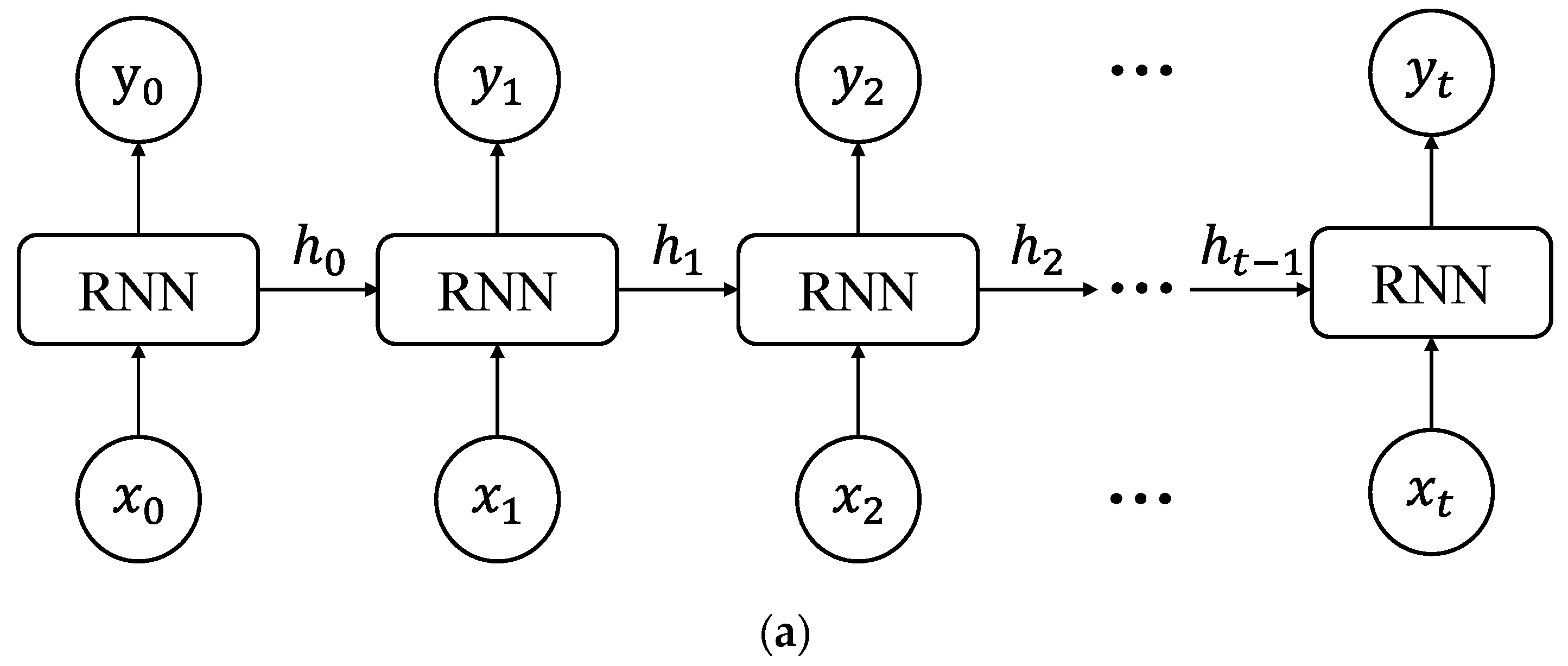
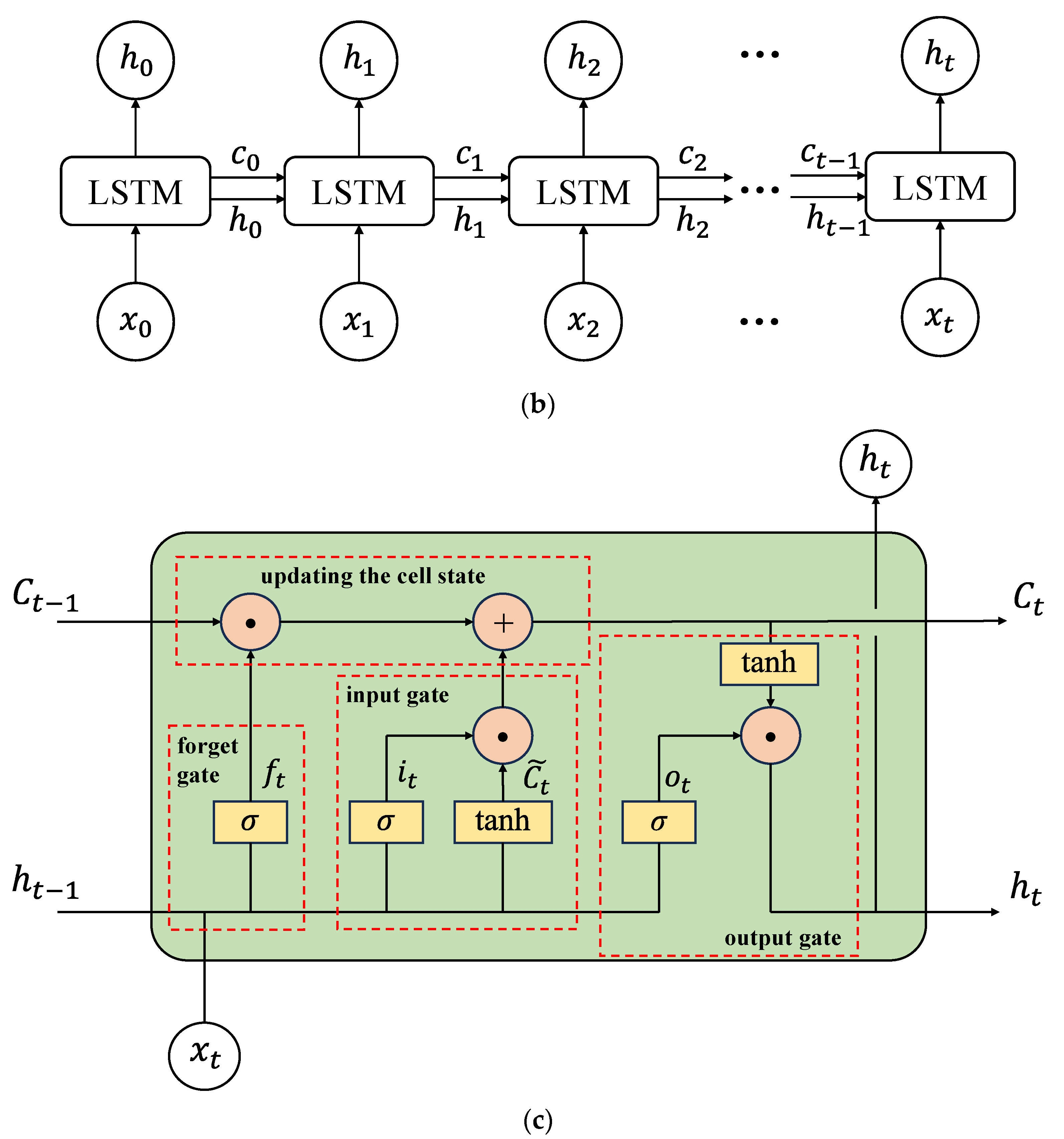
2.2. Long Short-Term Memory
2.3. Interval Prediction Model Based on Probability Density Estimation
2.4. Evaluation Metrics
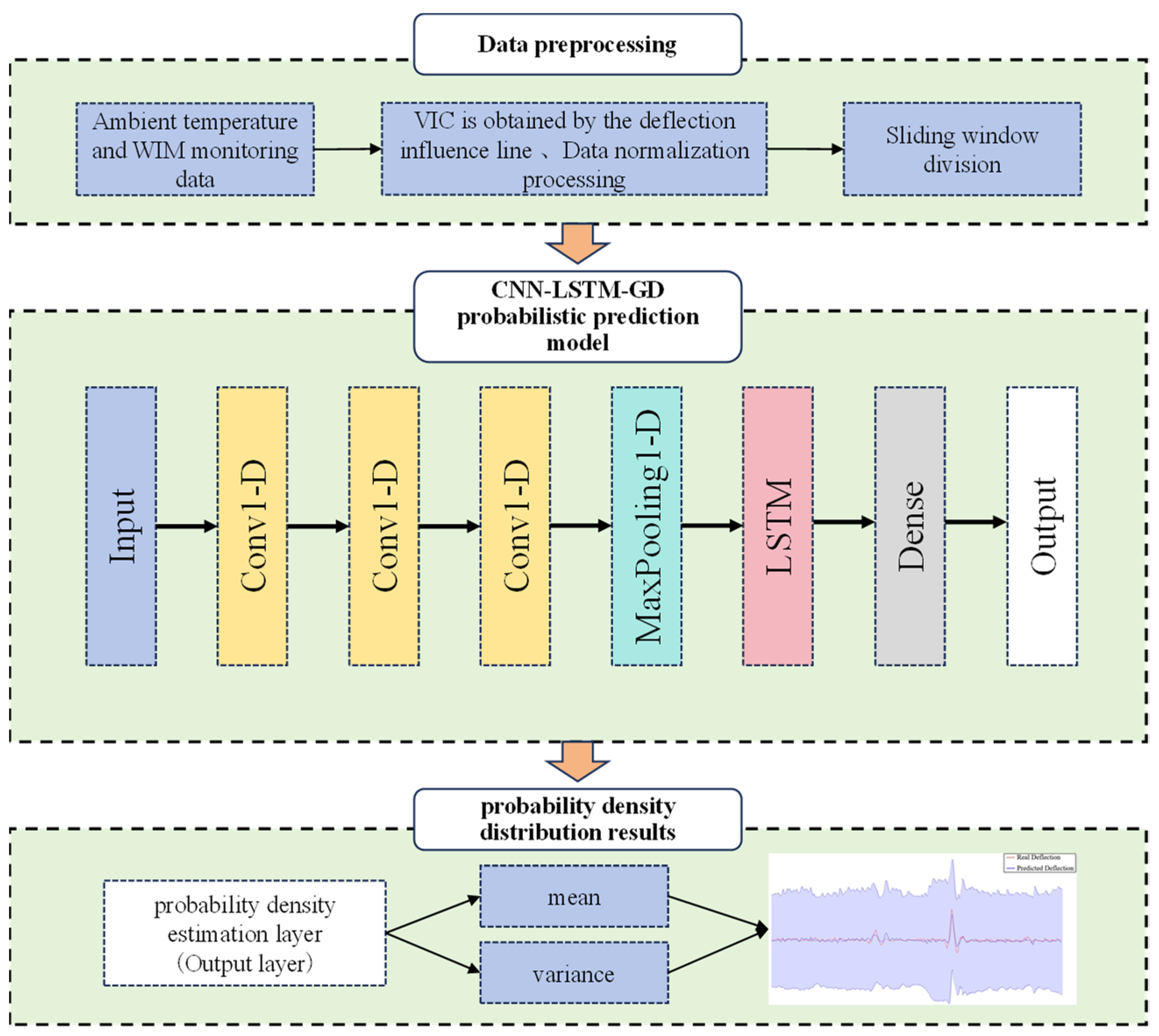
2.5. Modeling Strategy
- (1)
- Extract the ambient temperature, vehicle, and deflection monitoring data from the bridge’s structural health monitoring system. Given that the vehicle data are discrete, they cannot be directly inputted into the probabilistic model. Hence, it is essential to convert the raw WIM monitoring data into time-continuous VIC by employing linear superposition of the deflection influence lines.
- (2)
- Normalize the VIC, ambient temperature, and deflection monitoring data using the following formula:where and are the original data and the normalized transformed data, respectively. is the mean of the overall sample space, and is the standard deviation of the overall sample space.
- (3)
- Construct an interval prediction model comprising an input layer, a CNN layer, a pooling layer, an LSTM layer, a fully connected layer, and a probability density estimation layer. The normalized data are divided into a training set and a test set. The training set is used for network training, while the test set is used to evaluate the accuracy of the prediction model.
- (4)
- Utilize temperature data, vehicle influence coefficient data, and deflection monitoring data from the previous moment as inputs to generate a Gaussian distribution parameter matrix for the bridge deflection data output, thereby providing a prediction value for the deflection along with its corresponding confidence interval. The likelihood function is computed through maximum likelihood estimation and employed as the loss function for training the deep learning model. Continuously adjust the model’s hyperparameters based on its prediction results to incrementally enhance its accuracy and robustness.
3. Case Study: Deflection Prediction of the Main Beam for a Suspension Bridge
3.1. Bridge Overview
- (1)
- At the Luzhou Tower bridge location, a WIM system was installed to capture the arrival time, speed, and weight of four-lane vehicles at the bridgehead.
- (2)
- A temperature sensor is positioned at the center of the span to monitor the ambient temperature. This sensor records the temperature every minute.
- (3)
- The bridge employs a Connecting Pipe Monitoring System (CPS) to monitor its vertical deflection. This system involves connecting a reference point to a measurement point via a liquid-filled pipe. Any alteration in the position of the reference point and the measurement point leads to a change in the disparity in the liquid level height, thereby enabling the sensors to detect the vertical deflection at the measurement point. The system comprises 15 pressure transmitters and a water tank. One pressure transmitter is positioned as a reference point (RP) alongside the water tank in the Yibin tower. A total of seven pairs are formed by the remaining 14 pressure transmitters, which are positioned upstream and downstream at locations that correspond to l/8, l/4, 3l/8, l/2, 5l/8, 3l/4, and 7l/8 of the main beams. The pressure transmitters operate at a sampling frequency of 0.5 Hz.
3.2. Data Preprocessing
3.3. Model Parameter Setting
3.4. Deflection Interval Prediction Model
3.5. Model Application
- (1)
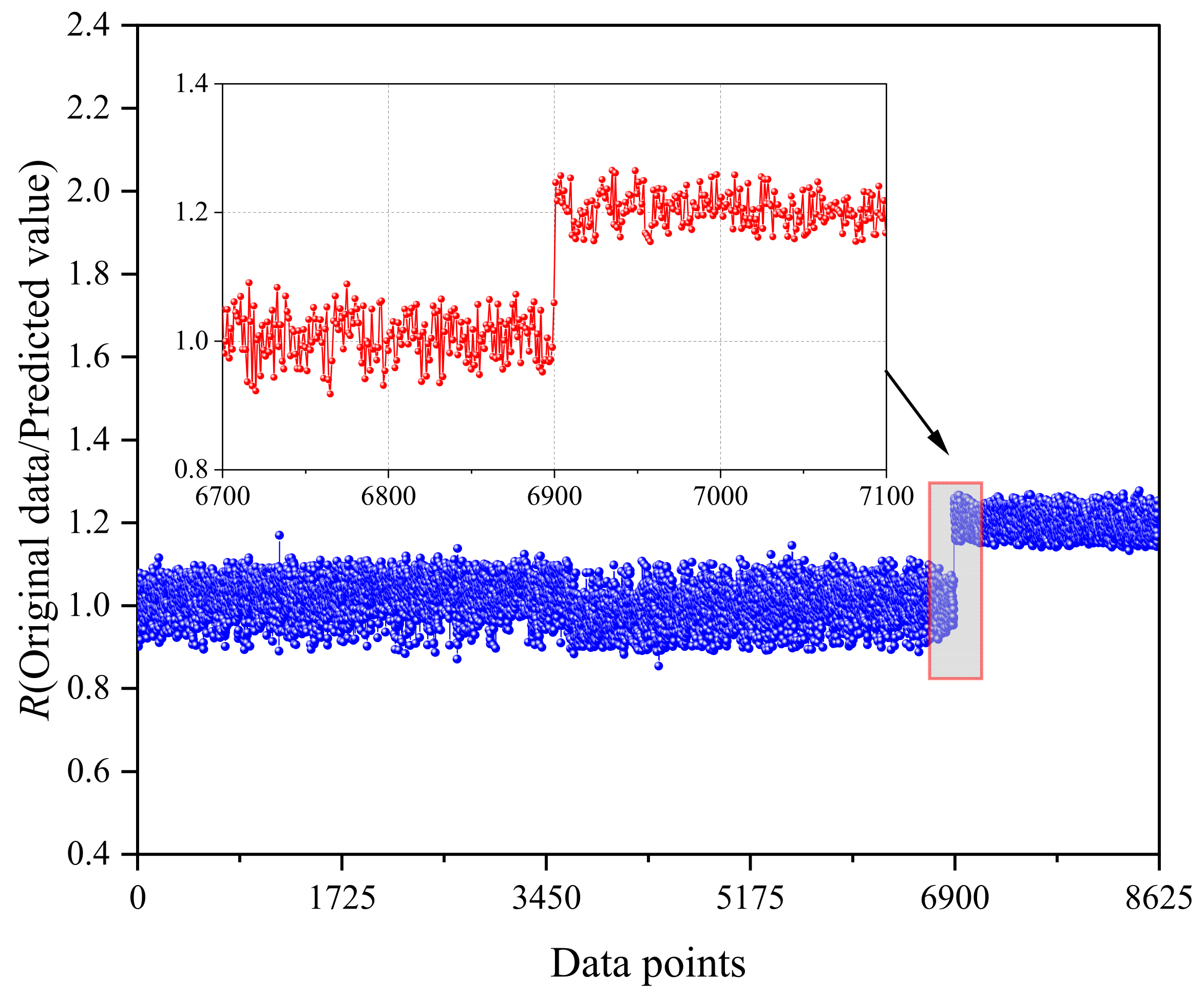
- Identification of abnormal deflection
- (2)
- Early warning of structural state anomalies based on probabilistic interval prediction
- (1)
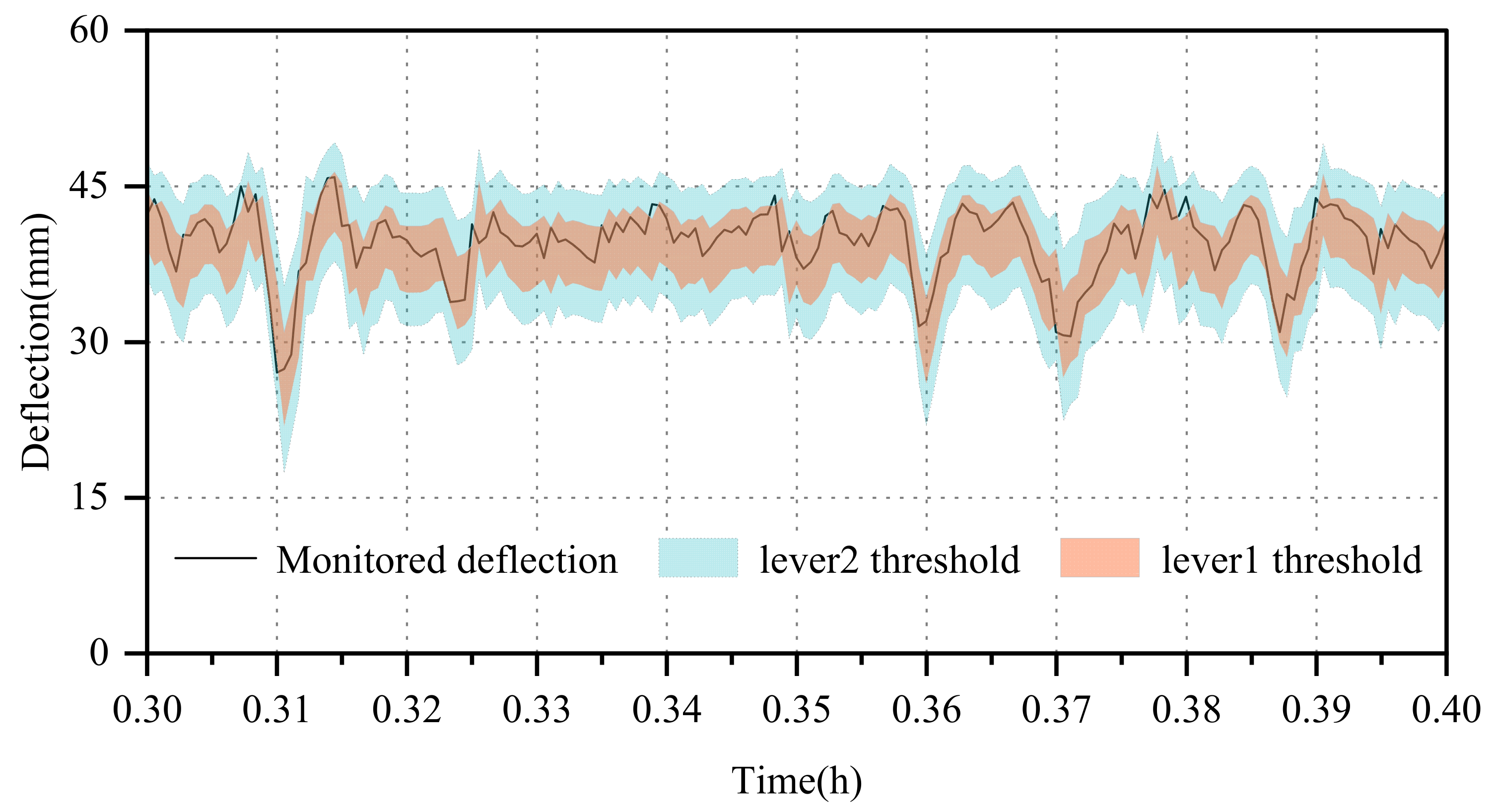
- The primary warning level employs the boundary of the interval as the warning threshold. Given that the probability of a value falling within the interval is 0.6826, an abnormal situation should be reported if 32% of the actual monitored deflection values fall outside this interval, prompting the maintenance unit to enhance supervision and inspection.
- (2)
- The secondary warning level utilizes the boundary of the interval as the warning threshold. The probability of a value falling within the interval is 0.9544. If 5% of the actual monitored deflection values exceed this interval, the relevant maintenance unit should closely monitor structural changes over an extended period, investigate the cause of the alert, ensure the operational safety of the bridge structure, and conduct a safety assessment of the bridge.
4. Conclusions
- (1)
- A probabilistic model for predicting deflection intervals is proposed, leveraging a CNN, LSTM, and Gaussian distribution probability density functions. The model takes into account temperature monitoring data, vehicle influence coefficients (VICs), and deflection monitoring data from the previous moment as inputs. Subsequently, it generates predictions for both the mean and standard deviation of deflection monitoring data at the next moment. This approach offers the advantage of providing not only deterministic predictions but also quantification of uncertainty, enabling the calculation of various confidence intervals. By leveraging this methodology, the model effectively addresses the complex nonlinear relationship between deflection, vehicle load, and temperature, making it well suited for comprehensive analysis in structural health monitoring applications.
- (2)
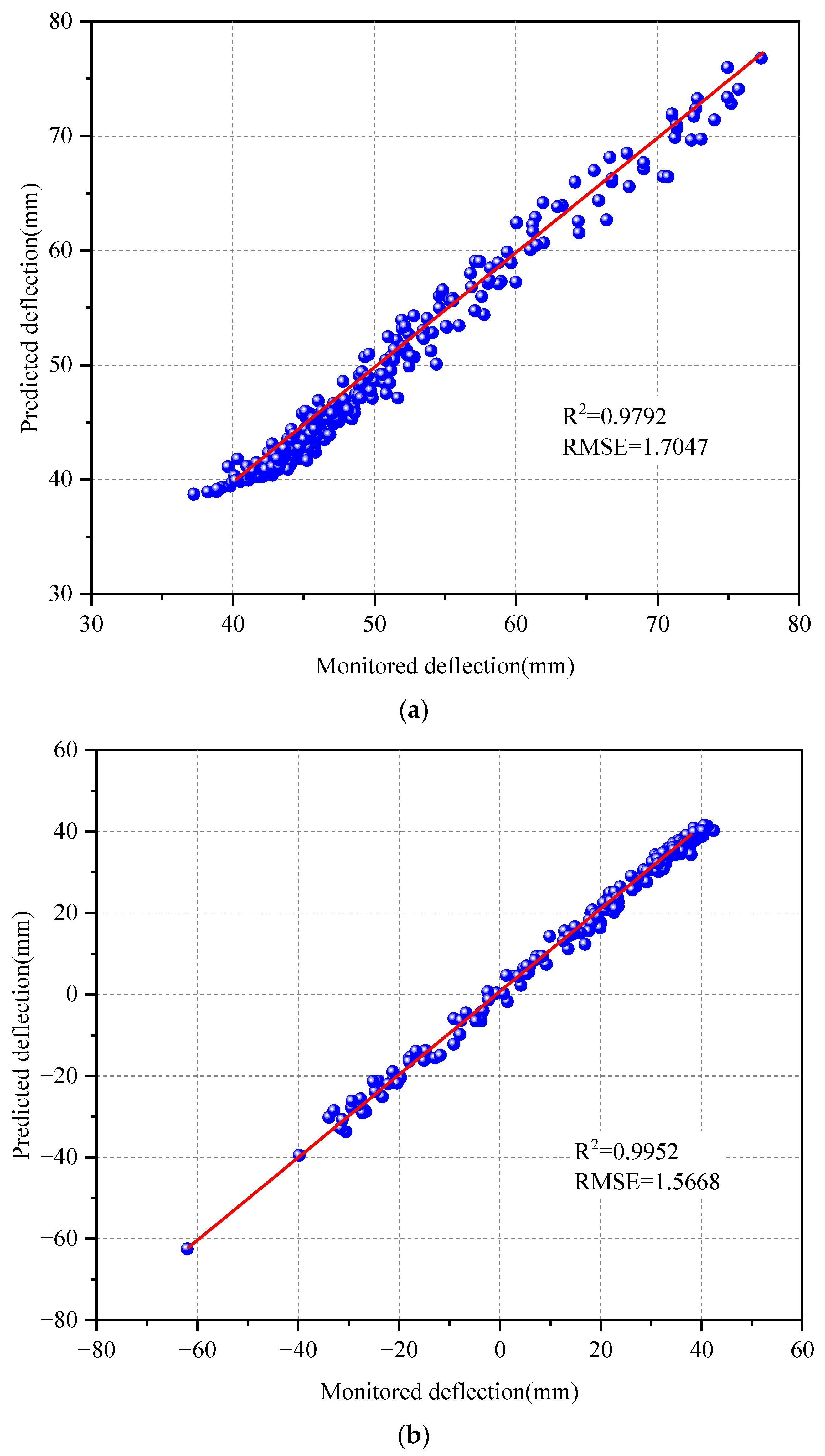
- This study evaluated the predictive performance of the probabilistic neural network model, revealing that the CNN-LSTM-GD model exhibited superior generalization ability and accuracy compared to the LSTM and CNN-LSTM models across various time scales. Specifically, for short-term deflection monitoring data characterized by minimal fluctuations, the CNN-LSTM-GD model accurately predicted the time-domain waveforms of the deflection data. Similarly, for long-term deflection monitoring data, the CNN-LSTM-GD model demonstrated enhanced predictive capability, particularly in forecasting extreme deflection within specific time windows. Additionally, the model’s 95% confidence intervals effectively quantify uncertainty, maintaining both a high interval coverage rate and a narrow interval width.
- (3)
- By introducing bias to the deflection input data and leveraging the deterministic prediction outcomes from the probabilistic model, anomalies in bridge operation can be more effectively identified through the ratio R. Furthermore, two warning mechanisms have been devised using the uncertainty intervals generated by the probabilistic model to establish deflection warning thresholds. These methods offer greater efficiency and convenience compared to traditional statistical analysis and finite element methods, enabling timely assessment of the bridge’s safety condition.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Brownjohn, J.M.; Koo, K.-Y.; Scullion, A.; List, D. Operational deformations in long-span bridges. Struct. Infrastruct. Eng. 2014, 11, 556–574. [Google Scholar] [CrossRef]
- Xin, J.; Jiang, Y.; Zhou, J.; Peng, L.; Liu, S.; Tang, Q. Bridge deformation prediction based on SHM data using improved VMD and conditional KDE. Eng. Struct. 2022, 261, 114285. [Google Scholar] [CrossRef]
- Lee, J.; Lee, K.-C.; Sim, S.-H.; Lee, J.; Lee, Y.-J. Bayesian Prediction of Pre-Stressed Concrete Bridge Deflection Using Finite Element Analysis. Sensors 2019, 19, 4956. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.; Wang, Y.; Fu, J.; Liu, A.; Gao, W. Measurement of the real-time deflection of cable-stayed bridge based on cable tension variations. Measurement 2018, 119, 218–228. [Google Scholar] [CrossRef]
- Liu, Y.; Deng, Y.; Cai, C.S. Deflection monitoring and assessment for a suspension bridge using a connected pipe system: A case study in China. Struct. Control Health Monit. 2015, 22, 1408–1425. [Google Scholar] [CrossRef]
- Zhou, J.; Sun, Z.; Wei, B.; Zhang, L.; Zeng, P. Deflection-based multilevel structural condition assessment of long-span prestressed concrete girder bridges using a connected pipe system. Measurement 2020, 169, 108352. [Google Scholar] [CrossRef]
- Martinez, D.; Malekjafarian, A.; Obrien, E. Bridge health monitoring using deflection measurements under random traffic. Struct. Control Health Monit. 2020, 27, e2593. [Google Scholar] [CrossRef]
- Zhou, L.-R.; Chen, L.; Xia, Y.; Koo, K.Y. Temperature-induced structural static responses of a long-span steel box girder suspension bridge. J. Zhejiang Univ.-Sci. A 2020, 21, 580–592. [Google Scholar] [CrossRef]
- Han, Q.; Ma, Q.; Xu, J.; Liu, M. Structural health monitoring research under varying temperature condition: A review. J. Civ. Struct. Health Monit. 2020, 11, 149–173. [Google Scholar] [CrossRef]
- Xu, X.; Ren, Y.; Huang, Q.; Zhao, D.-Y.; Tong, Z.-J.; Chang, W.-J. Thermal response separation for bridge long-term monitoring systems using multi-resolution wavelet-based methodologies. J. Civ. Struct. Health Monit. 2020, 10, 527–541. [Google Scholar] [CrossRef]
- Li, M.; Ren, W.-X.; Huang, T.-I.; Wang, N.-B. Extraction of the Bridge Temperature Strain Effect Based on EMD and IMF Energy. J. Highw. Transp. Res. Dev. 2016, 10, 41–48. [Google Scholar] [CrossRef]
- Tan, D.; Liu, X.; Liu, Y.; Qu, W.; Nie, S. Study on Separation of Bridge Deflection Temperature Effect Based on Improved PCA and EEMD. J. Wuhan Univ. Technol. 2018, 3, 28–34. [Google Scholar]
- Zhao, H.-W.; Ding, Y.-L.; Nagarajaiah, S.; Li, A.-Q. Behavior Analysis and Early Warning of Girder Deflections of a Steel-Truss Arch Railway Bridge under the Effects of Temperature and Trains: Case Study. J. Bridg. Eng. 2019, 24, 05018013. [Google Scholar] [CrossRef]
- Wu, J.; Chen, W.M. An Extraction Method for Live-Load Effect of Bridge Based on EEMD. Appl. Mech. Mater. 2011, 105–107, 1144–1148. [Google Scholar] [CrossRef]
- Li, S.; Xin, J.; Jiang, Y.; Wang, C.; Zhou, J.; Yang, X. Temperature-induced deflection separation based on bridge deflection data using the TVFEMD-PE-KLD method. J. Civ. Struct. Health Monit. 2023, 13, 781–797. [Google Scholar] [CrossRef]
- Kromanis, R.; Kripakaran, P. Predicting thermal response of bridges using regression models derived from measurement histories. Comput. Struct. 2014, 136, 64–77. [Google Scholar] [CrossRef]
- Zhou, G.-D.; Yi, T.-H.; Chen, B.; Chen, X. Modeling Deformation Induced by Thermal Loading Using Long-Term Bridge Monitoring Data. J. Perform. Constr. Facil. 2018, 32, 04018011. [Google Scholar] [CrossRef]
- Wang, M.; Ding, Y.; Zhao, H. Digital prediction model of temperature-induced deflection for cable-stayed bridges based on learning of response-only data. J. Civ. Struct. Health Monit. 2022, 12, 629–645. [Google Scholar] [CrossRef]
- Zhou, Y.; Sun, L. Insights into temperature effects on structural deformation of a cable-stayed bridge based on structural health monitoring. Struct. Health Monit. 2018, 18, 778–791. [Google Scholar] [CrossRef]
- Xu, X.; Huang, Q.; Ren, Y.; Zhao, D.-Y.; Yang, J.; Zhang, D.-Y. Modeling and Separation of Thermal Effects from Cable-Stayed Bridge Response. J. Bridg. Eng. 2019, 24, 04019028. [Google Scholar] [CrossRef]
- Huang, M.; Wan, N.; Zhu, H. Reconstruction of structural acceleration response based on CNN-BiGRU with squeeze-and-excitation under environmental temperature effects. J. Civ. Struct. Health Monit. 2024, 1–19. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, M.; Wan, N.; Deng, Z.; He, Z.; Luo, J. Missing measurement data recovery methods in structural health monitoring: The state, challenges and case study. Measurement 2024, 231, 114528. [Google Scholar] [CrossRef]
- Huang, M.; Zhang, J.; Li, J.; Deng, Z.; Luo, J. Damage identification of steel bridge based on data augmentation and adaptive optimization neural network. Struct. Health Monit. 2024, 14759217241255042. [Google Scholar] [CrossRef]
- Huang, M.; Zhang, J.; Hu, J.; Ye, Z.; Deng, Z.; Wan, N. Nonlinear modeling of temperature-induced bearing displacement of long-span single-pier rigid frame bridge based on DCNN-LSTM. Case Stud. Therm. Eng. 2024, 53, 103897. [Google Scholar] [CrossRef]
- Remmelzwaal, L. Object Detection and Tracking for Crate and Bottle Identification in a Bottling Plant Using Deep Learning. Artif. Intell. Appl. 2023, 1, 191–195. [Google Scholar] [CrossRef]
- Yue, Z.-X.; Ding, Y.-L.; Zhao, H.-W. Deep Learning-Based Minute-Scale Digital Prediction Model of Temperature-Induced Deflection of a Cable-Stayed Bridge: Case Study. J. Bridg. Eng. 2021, 26, 05021004. [Google Scholar] [CrossRef]
- Yue, Z.; Ding, Y.; Zhao, H.; Wang, Z. Ultra-high precise Stack-LSTM-CNN model of temperature-induced deflection of a cable-stayed bridge for detecting bridge state driven by monitoring data. Structures 2022, 45, 110–125. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, Y.-M.; Mao, J.-X.; Wan, H.-P.; Tao, T.-Y.; Zhu, Q.-X. Modeling and forecasting of temperature-induced strain of a long-span bridge using an improved Bayesian dynamic linear model. Eng. Struct. 2019, 192, 220–232. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, X.; Cui, J.; Wang, H.; Huang, L.; Zeng, W.; Zhang, H. Lifetime fatigue cracking behavior of weld defects in orthotropic steel bridge decks: Numerical and experimental study. Engineering Failure Analysis. 2024, 21, 108993. [Google Scholar] [CrossRef]
- Lu, N.; Beer, M.; Noori, M.; Liu, Y. Lifetime Deflections of Long-Span Bridges Under Dynamic and Growing Traffic Loads. J. Bridg. Eng. 2017, 22, 04017086. [Google Scholar] [CrossRef]
- Xia, Q.; Tian, Y.-D.; Cai, D.-X.; Zhang, J. Structural flexibility identification and fast-Bayesian-based uncertainty quantification of a cable-stayed bridge. Eng. Struct. 2020, 214, 110616. [Google Scholar] [CrossRef]
- Lu, N.; Noori, M.; Liu, Y. First-passage probability of the deflection of a cable-stayed bridge under long-term site-specific traffic loading. Adv. Mech. Eng. 2017, 9, 1687814016687271. [Google Scholar] [CrossRef]
- Deng, Y.; Ju, H.; Zhai, W.; Li, A.; Ding, Y. Correlation model of deflection, vehicle load, and temperature for in-service bridge using deep learning and structural health monitoring. Struct. Control Health Monit. 2022, 29, e3113. [Google Scholar] [CrossRef]
- Guo, Q.; Sun, Y.; Mi, T. Assessment on long-term deflection of concrete beam bridges based on uncertainty quantification method. Structures 2021, 34, 3013–3027. [Google Scholar] [CrossRef]
- Han, B.; Xiang, T.-Y.; Xie, H.-B. A Bayesian inference framework for predicting the long-term deflection of concrete structures caused by creep and shrinkage. Eng. Struct. 2017, 142, 46–55. [Google Scholar] [CrossRef]
- Ni, Y.-C.; Zhang, Q.-W.; Liu, J.-F. Dynamic Property Evaluation of a Long-Span Cable-Stayed Bridge (Sutong Bridge) by a Bayesian Method. Int. J. Struct. Stab. Dyn. 2018, 19, 1940010. [Google Scholar] [CrossRef]
- Der Kiureghian, A.; Ditlevsen, O. Aleatory or epistemic? Does it matter? Struct. Saf. 2009, 31, 105–112. [Google Scholar] [CrossRef]
- Bhosle, K.; Musande, V. Evaluation of Deep Learning CNN Model for Recognition of Devanagari Digit. Artif. Intell. Appl. 2023, 1, 114–118. [Google Scholar] [CrossRef]
- Chen, F.; Zhang, H.; Li, Z.; Luo, Y.; Xiao, X.; Liu, Y. Residual stresses effects on fatigue crack growth behavior of rib-to-deck double-sided welded joints in orthotropic steel decks. Adv. Struct. Eng. 2024, 27, 35–50. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, H.; Kuai, H. Stress intensity factor analysis for multiple cracks in orthotropic steel decks rib-to-floorbeam weld details under vehicles loading. Eng. Fail. Anal. 2024, 164, 108705. [Google Scholar] [CrossRef]
- Hickey, J.; Langley, R. Alternative metrics for design decisions based on separating aleatory and epistemic probabilistic uncertainties. Mech. Syst. Signal Process. 2022, 181, 109532. [Google Scholar] [CrossRef]
- Windschitl, P.D.; Miller, J.E.; Park, I.; Rule, S.; Clary, A.; Smith, A.R. The desirability bias in predictions under aleatory and epistemic uncertainty. Cognition 2022, 229, 105254. [Google Scholar] [CrossRef] [PubMed]
- Sousa, H.; Santos, L.O.; Chryssanthopoulos, M. Quantifying monitoring requirements for predicting creep deformations through Bayesian updating methods. Struct. Saf. 2018, 76, 40–50. [Google Scholar] [CrossRef]
- Kim, Y. Convolutional Neural Networks for Sentence Classification. arXiv 2014, arXiv:1408.5882. [Google Scholar]
- Chen, X.; Jia, J.; Yang, J.; Bai, Y.; Du, X. A vibration-based 1DCNN-BiLSTM model for structural state recognition of RC beams. Mech. Syst. Signal Process. 2023, 203, 110715. [Google Scholar] [CrossRef]
- Yue, Z.; Ding, Y.; Zhao, H.; Wang, Z. Mechanics-Guided optimization of an LSTM network for Real-Time modeling of Temperature-Induced deflection of a Cable-Stayed bridge. Eng. Struct. 2021, 252, 113619. [Google Scholar] [CrossRef]
- Ministry of Transport (MOT). Technical Specification for Structural Safety Monitoring Systems of Highway Bridges; China Communication Press: Beijing, China, 2022.
- Deng, Y.; Li, A.; Chen, S.; Feng, D. Serviceability assessment for long-span suspension bridge based on deflection measurements. Struct. Control Health Monit. 2018, 25, e2254. [Google Scholar] [CrossRef]
- Fan, Z.; Huang, Q.; Ren, Y.; Xu, X.; Zhu, Z. Real-Time Dynamic Warning on Deflection Abnormity of Cable-Stayed Bridges Considering Operational Environment Variations. J. Perform. Constr. Facil. 2021, 35, 04020123. [Google Scholar] [CrossRef]
- Ding, Y.-L.; Zhao, H.-W.; Deng, L.; Li, A.-Q.; Wang, M.-Y. Early Warning of Abnormal Train-Induced Vibrations for a Steel-Truss Arch Railway Bridge: Case Study. J. Bridg. Eng. 2017, 22, 05017011. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category of Neural Network | The Number of Neurons in Convolutional Layer | The Number of Neurons in LSTM Layer | The Number of Neurons in Fully Connected Layer | Batch Size | Epoch | Learning Rate (lr) | Time Steps |
|---|---|---|---|---|---|---|---|
| CNN-LSTM-GD | 128 | 128 | 2 | 512 | 500 | 0.0001–0.00005 | 15 |
| CNN-LSTM | 128 | 128 | 1 | 512 | 500 | 0.0001–0.00005 | 15 |
| LSTM | / | 128 | 1 | 512 | 500 | 0.0001–0.00005 | 15 |
| Data | Kind | RMSE | PICP | PINAW | |
|---|---|---|---|---|---|
| T1 | LSTM | 2.16 | 0.8523 | / | / |
| CNN-LSTM | 1.59 | 0.8988 | / | / | |
| CNN-LSTM-GD | 1.14 | 0.9577 | 0.9924 | 0.4404 |
| Data | Kind | RMSE | PICP | PINAW | |
|---|---|---|---|---|---|
| T2 | LSTM | 4.32 | 0.8785 | / | / |
| CNN-LSTM | 3.20 | 0.9195 | / | / | |
| CNN-LSTM-GD | 1.97 | 0.9683 | 0.9847 | 0.1120 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, X.; Wang, Z.; Zhang, H.; Luo, Y.; Chen, F.; Deng, Y.; Lu, N.; Chen, Y. A Novel Method of Bridge Deflection Prediction Using Probabilistic Deep Learning and Measured Data. Sensors 2024, 24, 6863. https://doi.org/10.3390/s24216863
Xiao X, Wang Z, Zhang H, Luo Y, Chen F, Deng Y, Lu N, Chen Y. A Novel Method of Bridge Deflection Prediction Using Probabilistic Deep Learning and Measured Data. Sensors. 2024; 24(21):6863. https://doi.org/10.3390/s24216863
Chicago/Turabian StyleXiao, Xinhui, Zepeng Wang, Haiping Zhang, Yuan Luo, Fanghuai Chen, Yang Deng, Naiwei Lu, and Ying Chen. 2024. "A Novel Method of Bridge Deflection Prediction Using Probabilistic Deep Learning and Measured Data" Sensors 24, no. 21: 6863. https://doi.org/10.3390/s24216863
APA StyleXiao, X., Wang, Z., Zhang, H., Luo, Y., Chen, F., Deng, Y., Lu, N., & Chen, Y. (2024). A Novel Method of Bridge Deflection Prediction Using Probabilistic Deep Learning and Measured Data. Sensors, 24(21), 6863. https://doi.org/10.3390/s24216863