
Aerodynamic Analysis of Rotor Spacing and Attitude Transition in Tilt-Powered Coaxial Rotor UAV


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Models and Methods
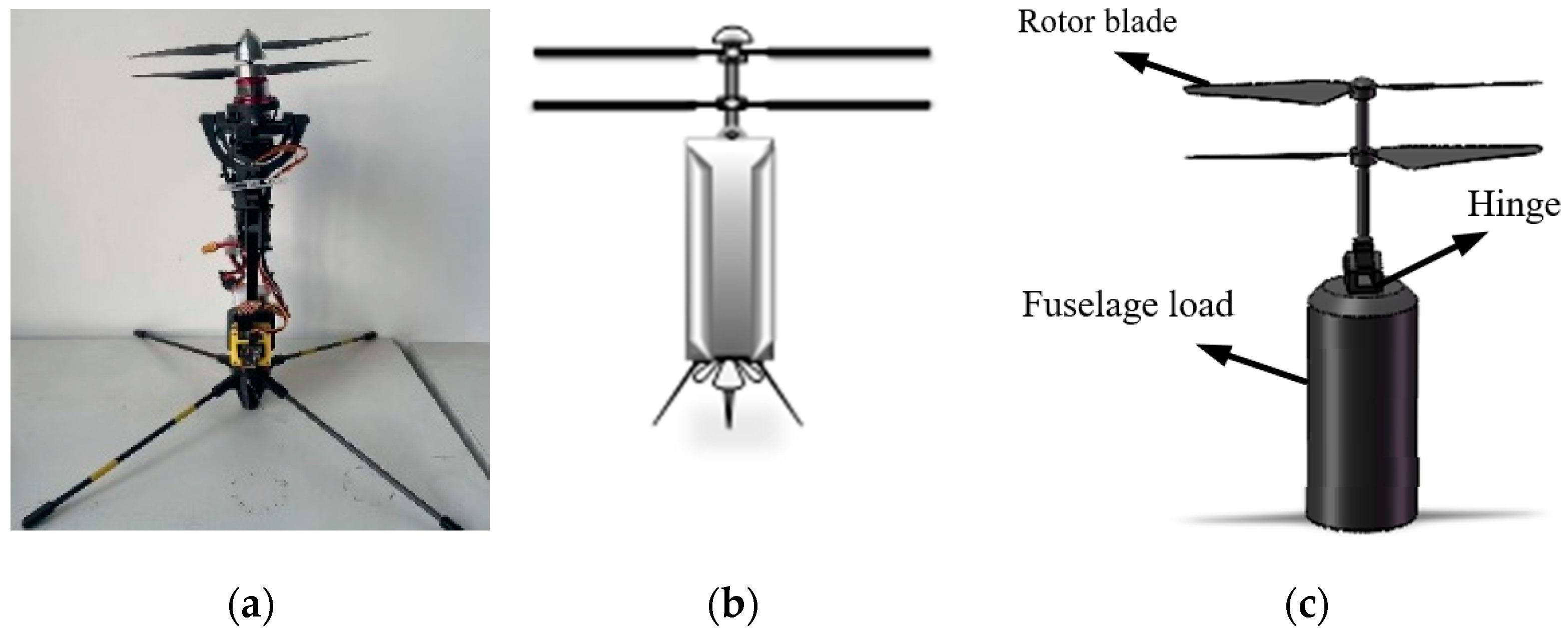
2.1. Coaxial Twin-Rotor UAV Model
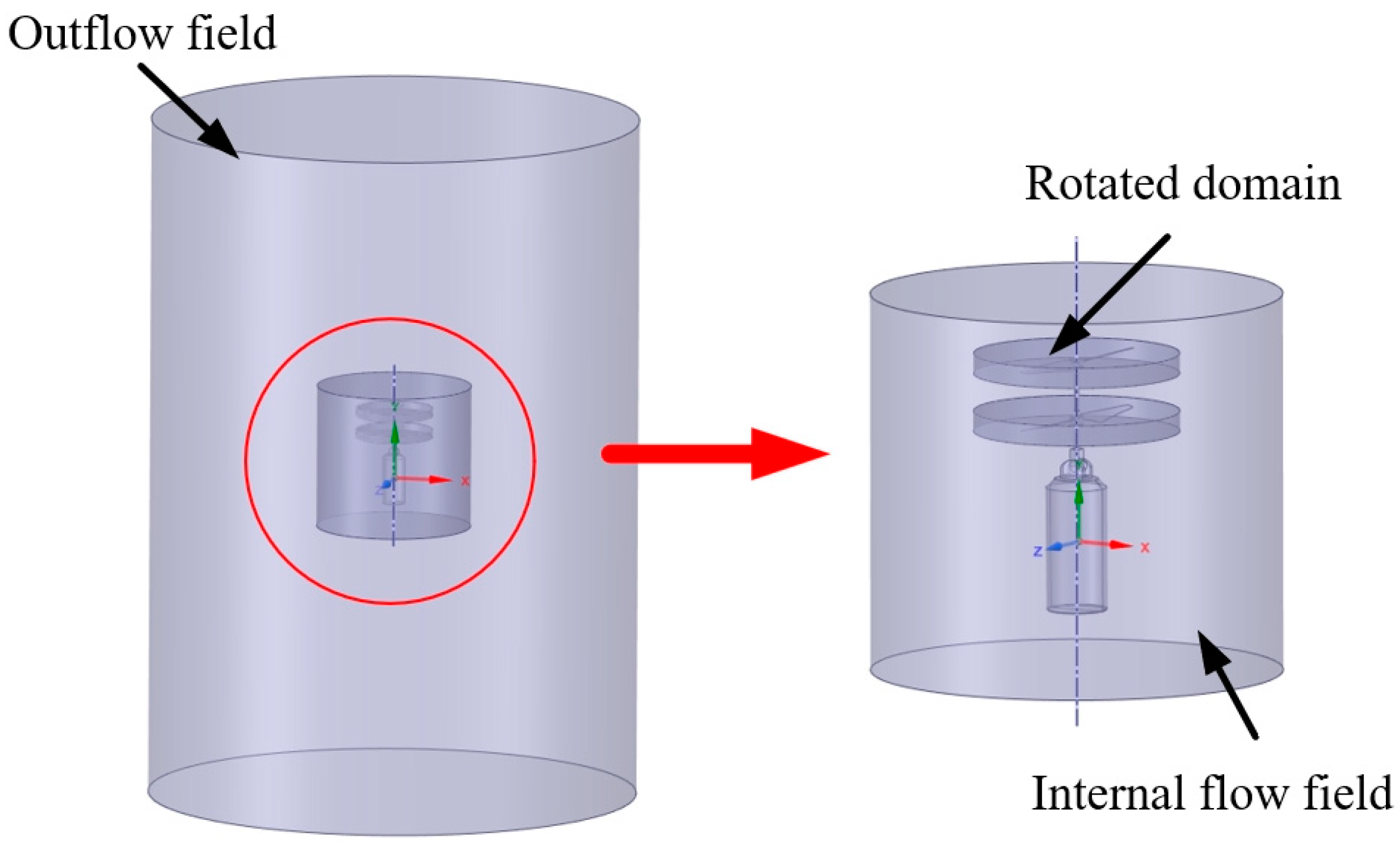
2.2. Flow Field Division
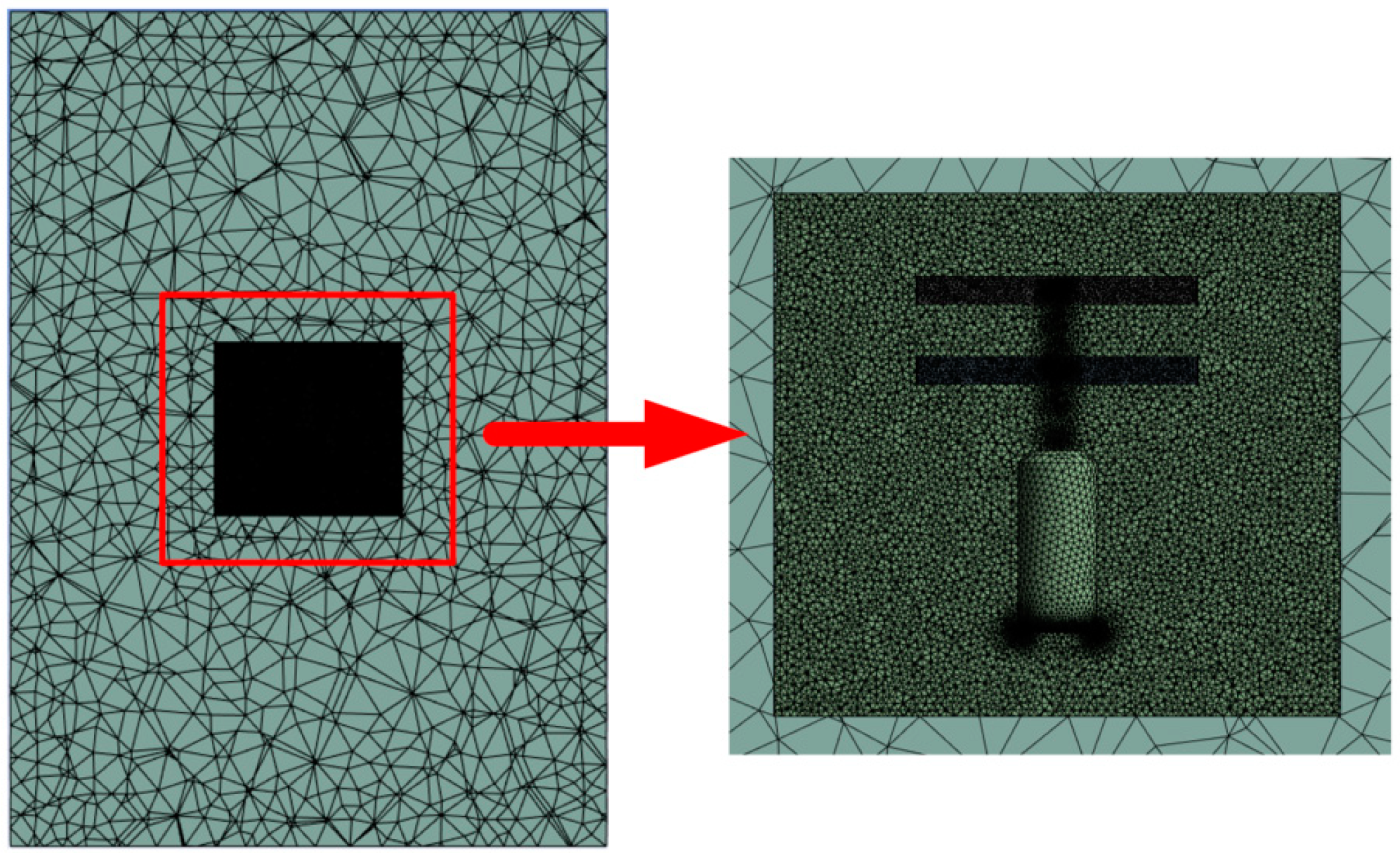
2.3. Meshing
2.4. Calculation Methods and Boundary Condition Settings
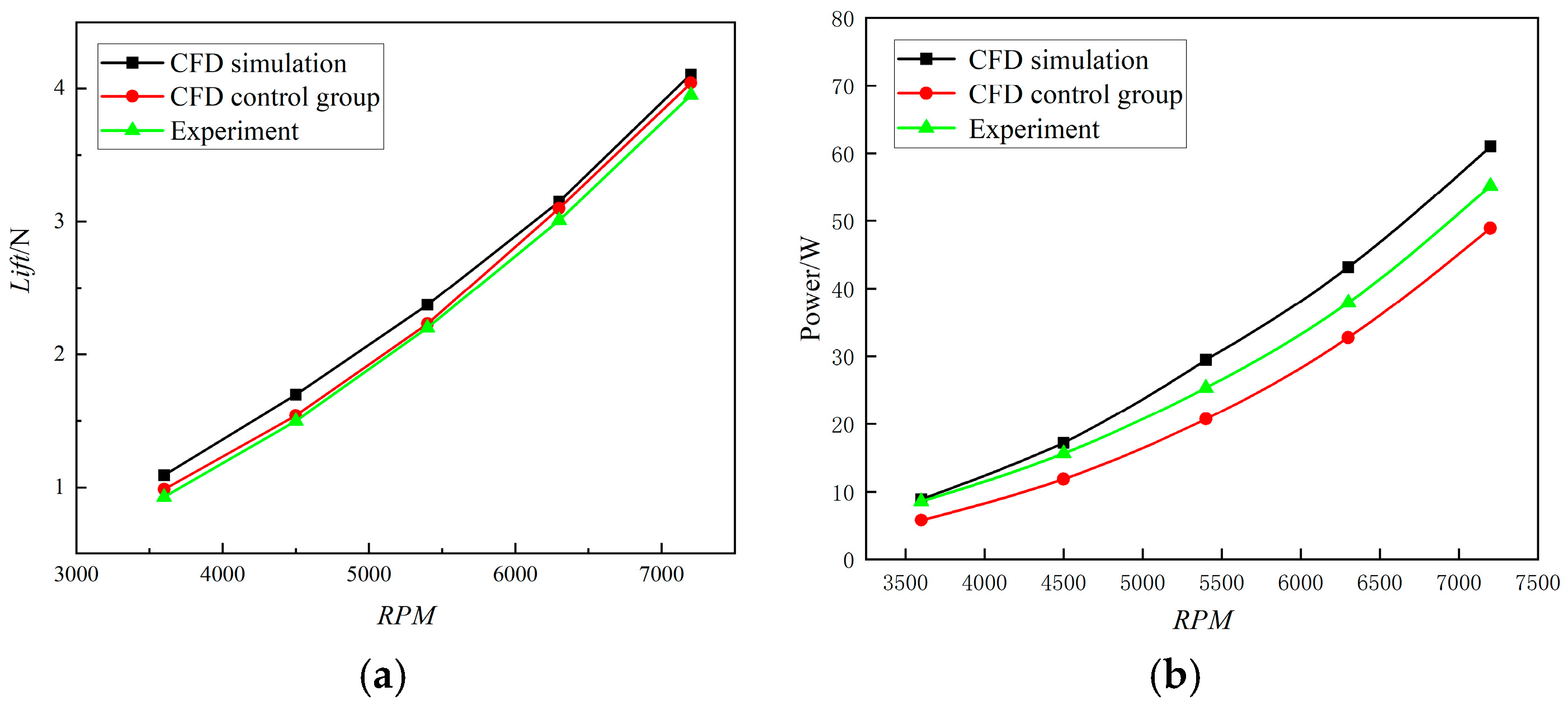
2.5. Validation of Numerical Simulation Methods
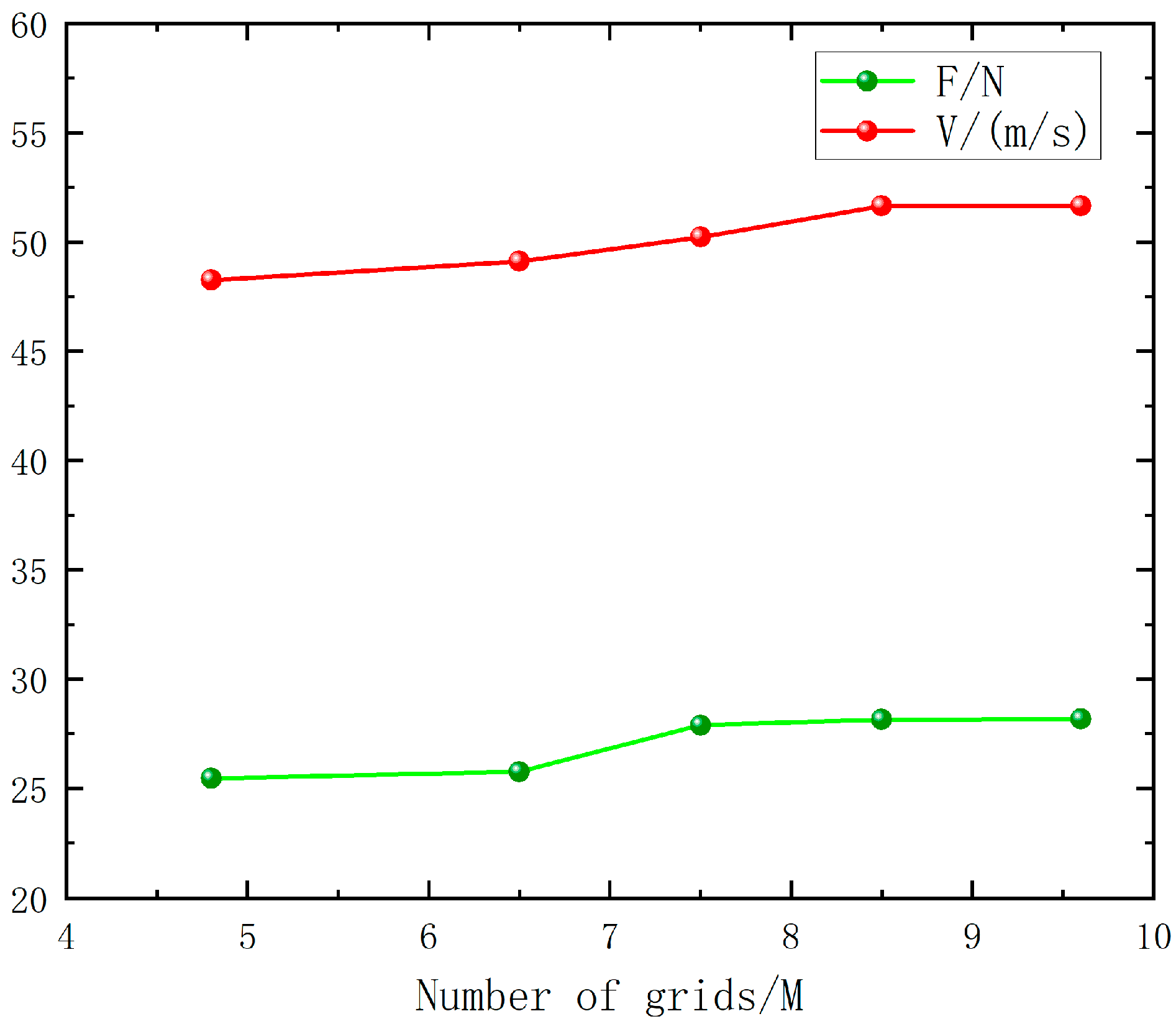
2.6. Grid-Independent Verification
3. Results and Discussion
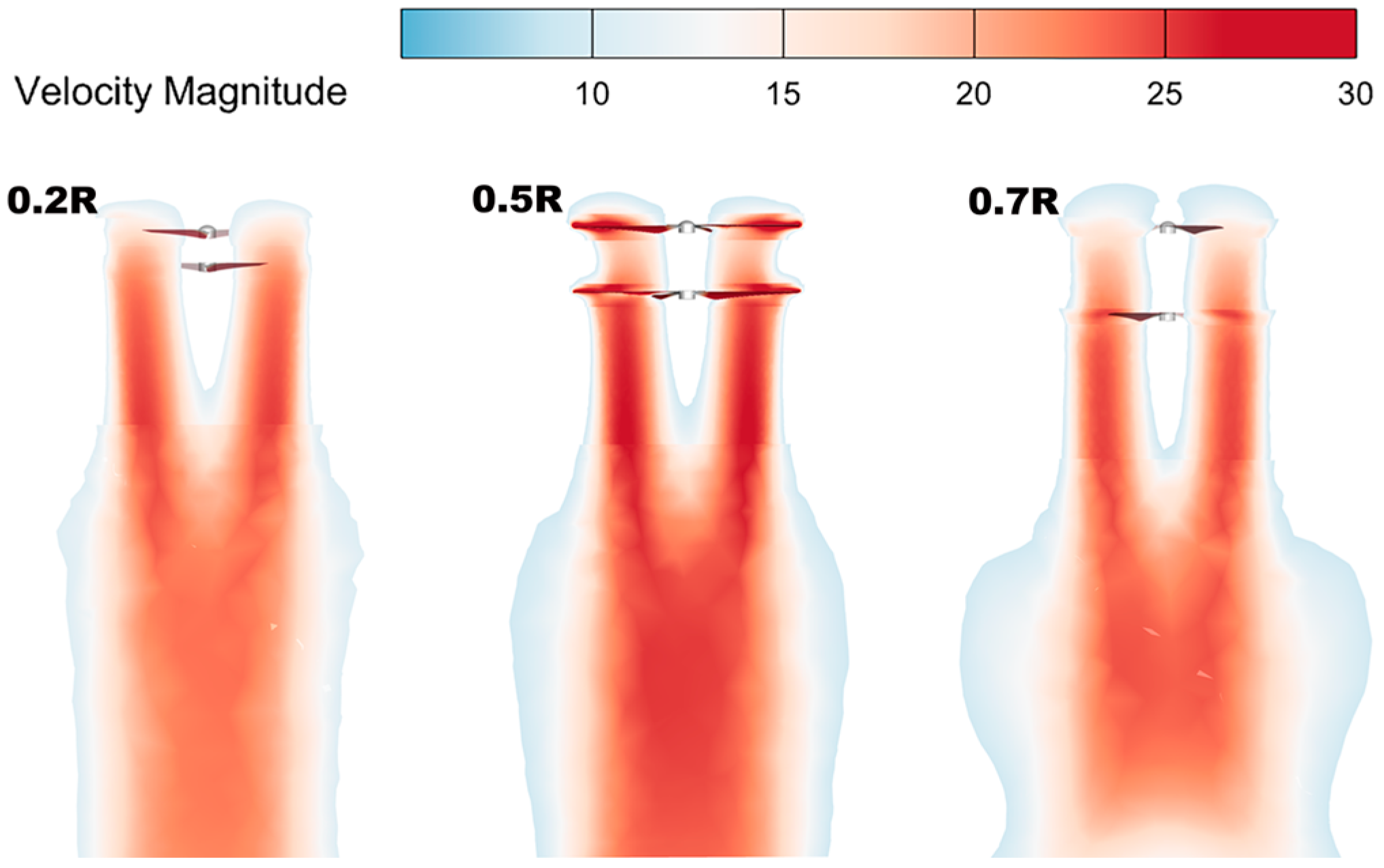
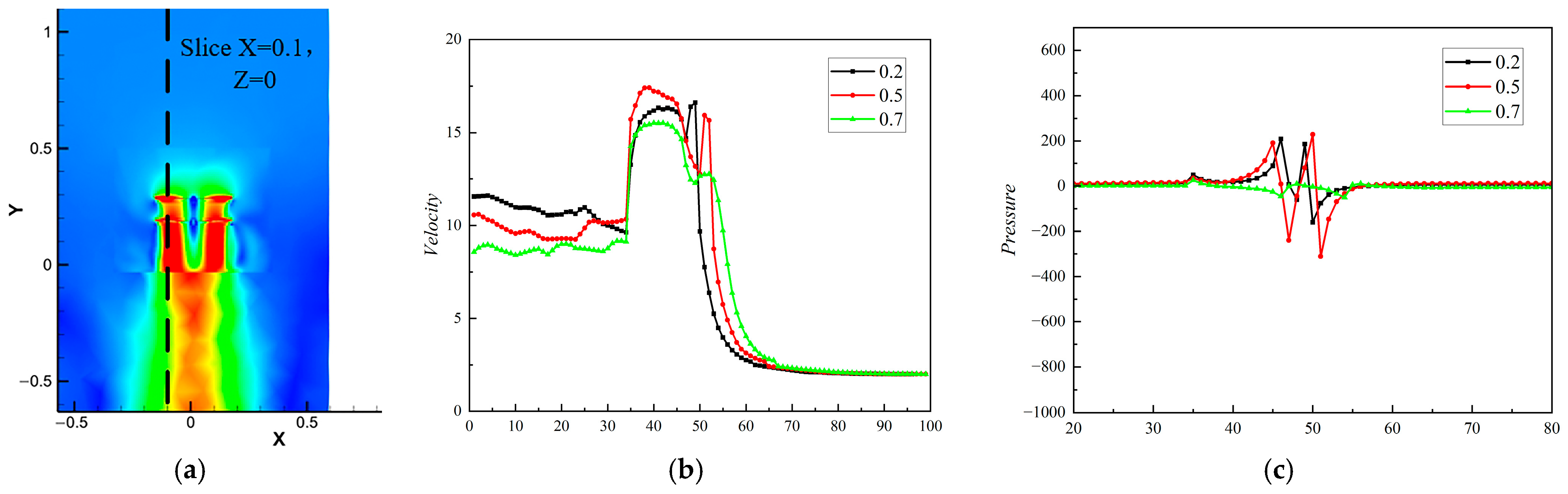
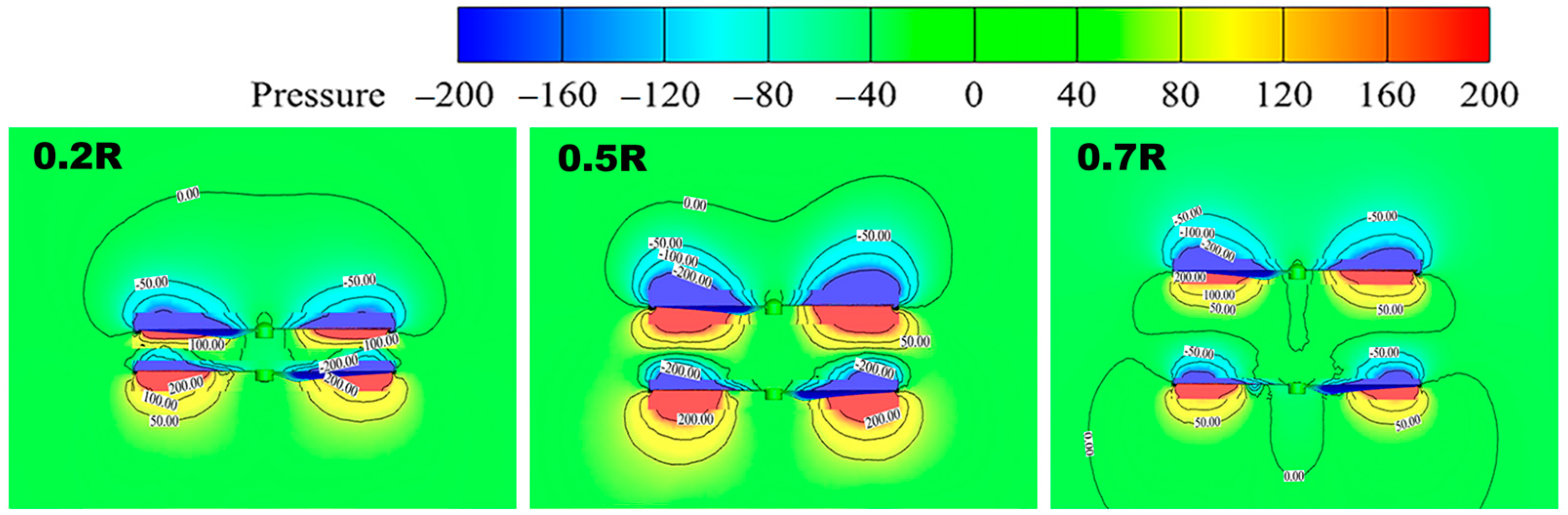
3.1. Effect of Rotor Spacing
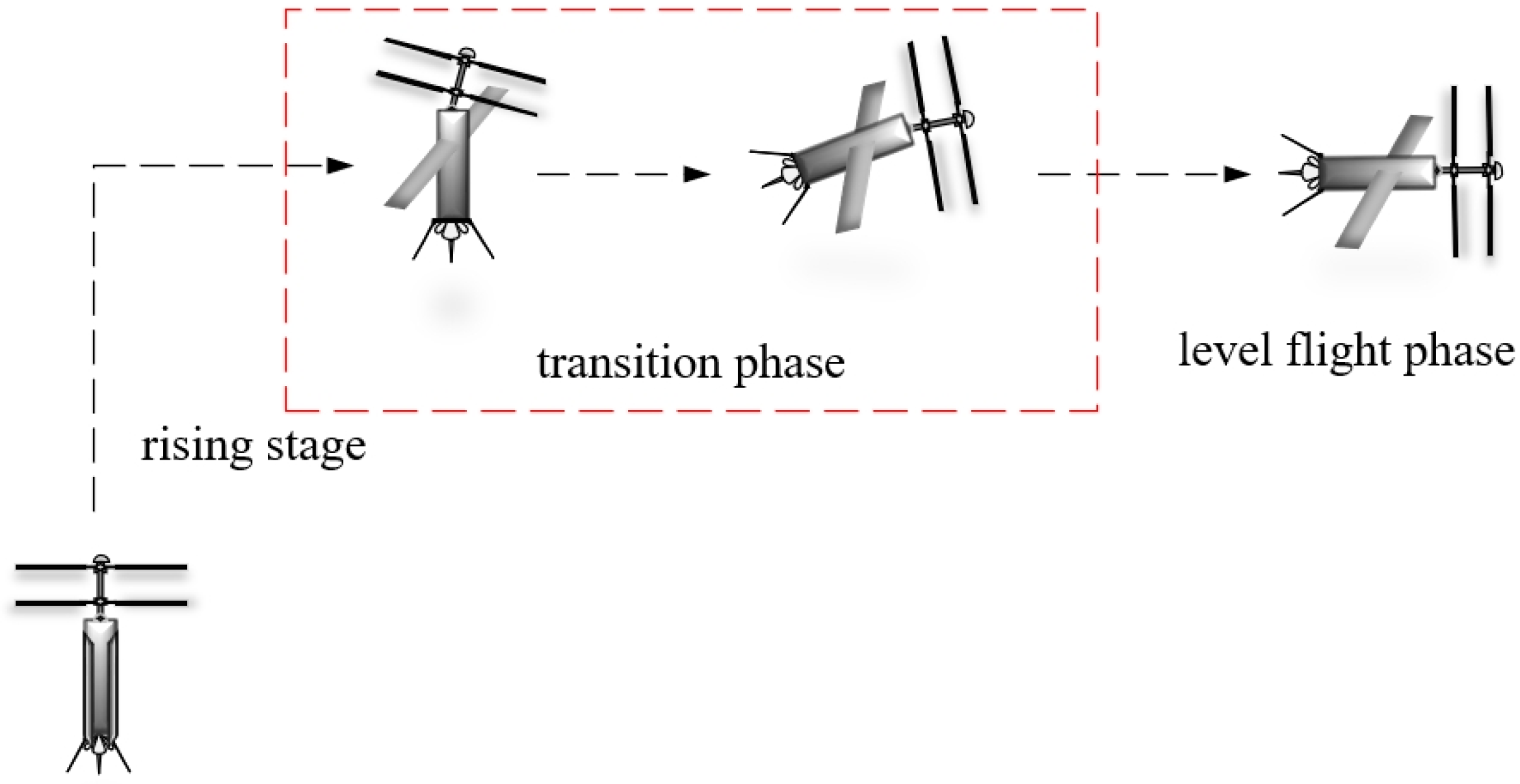
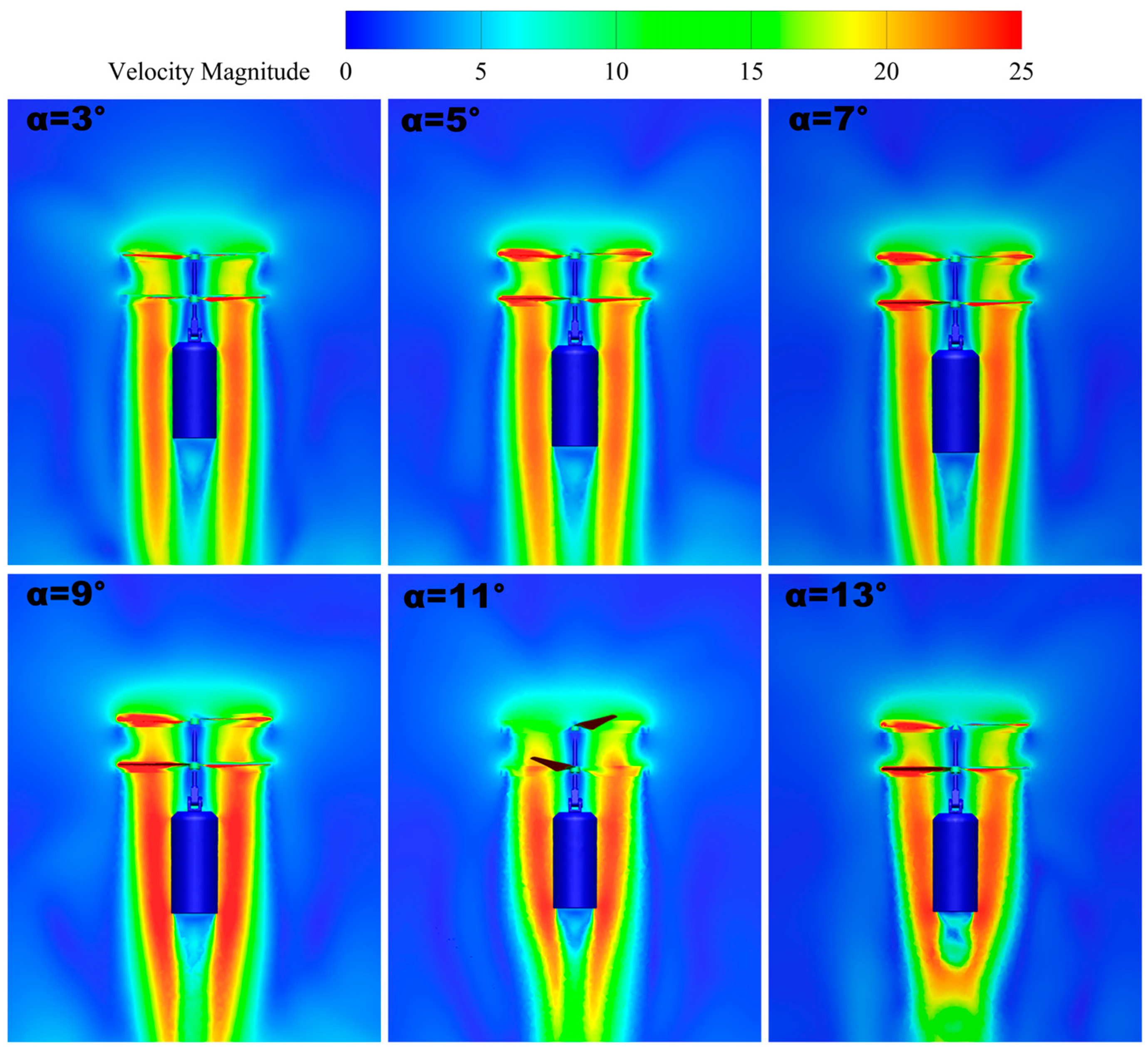
3.2. Effect of Tilt Angle
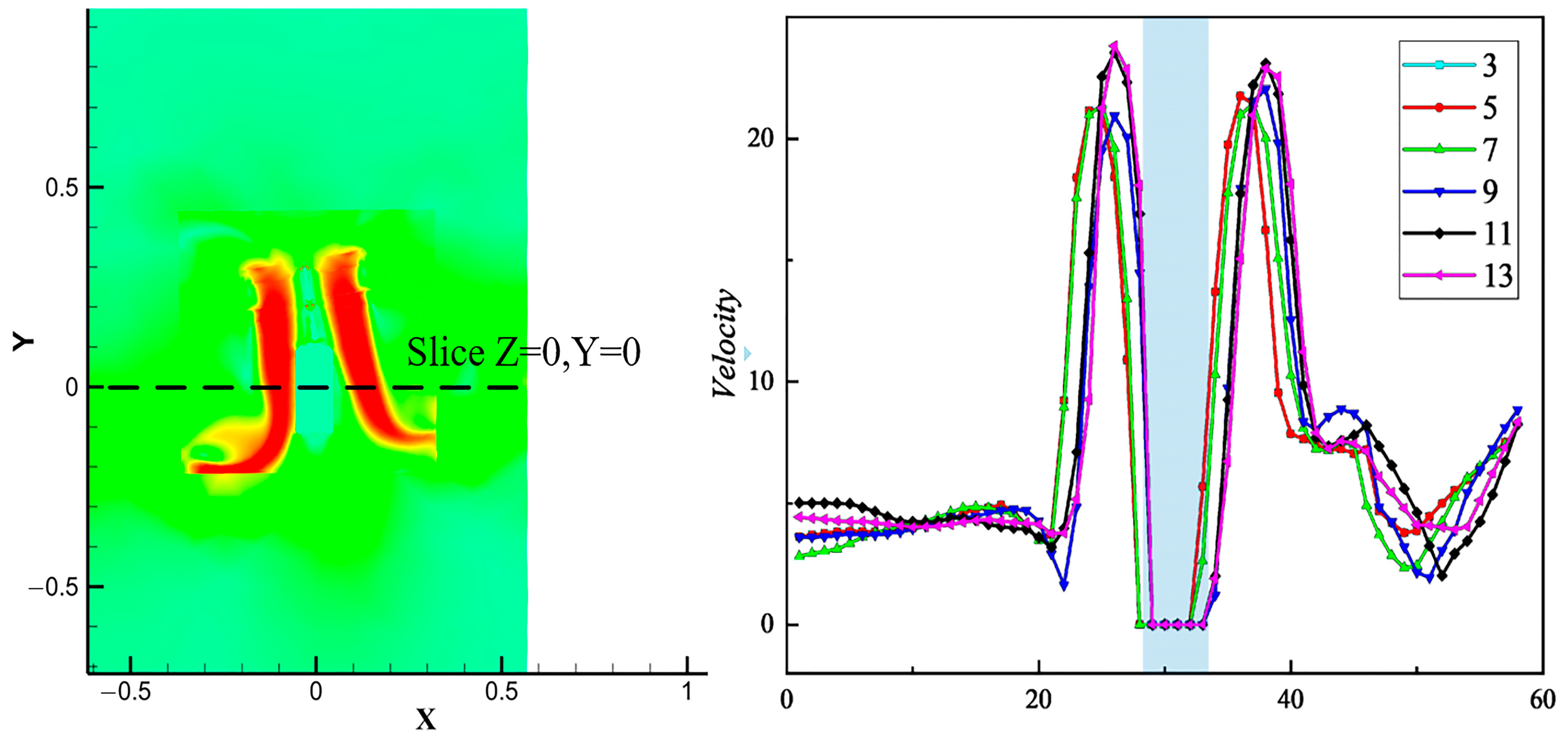
3.2.1. Velocity Distribution
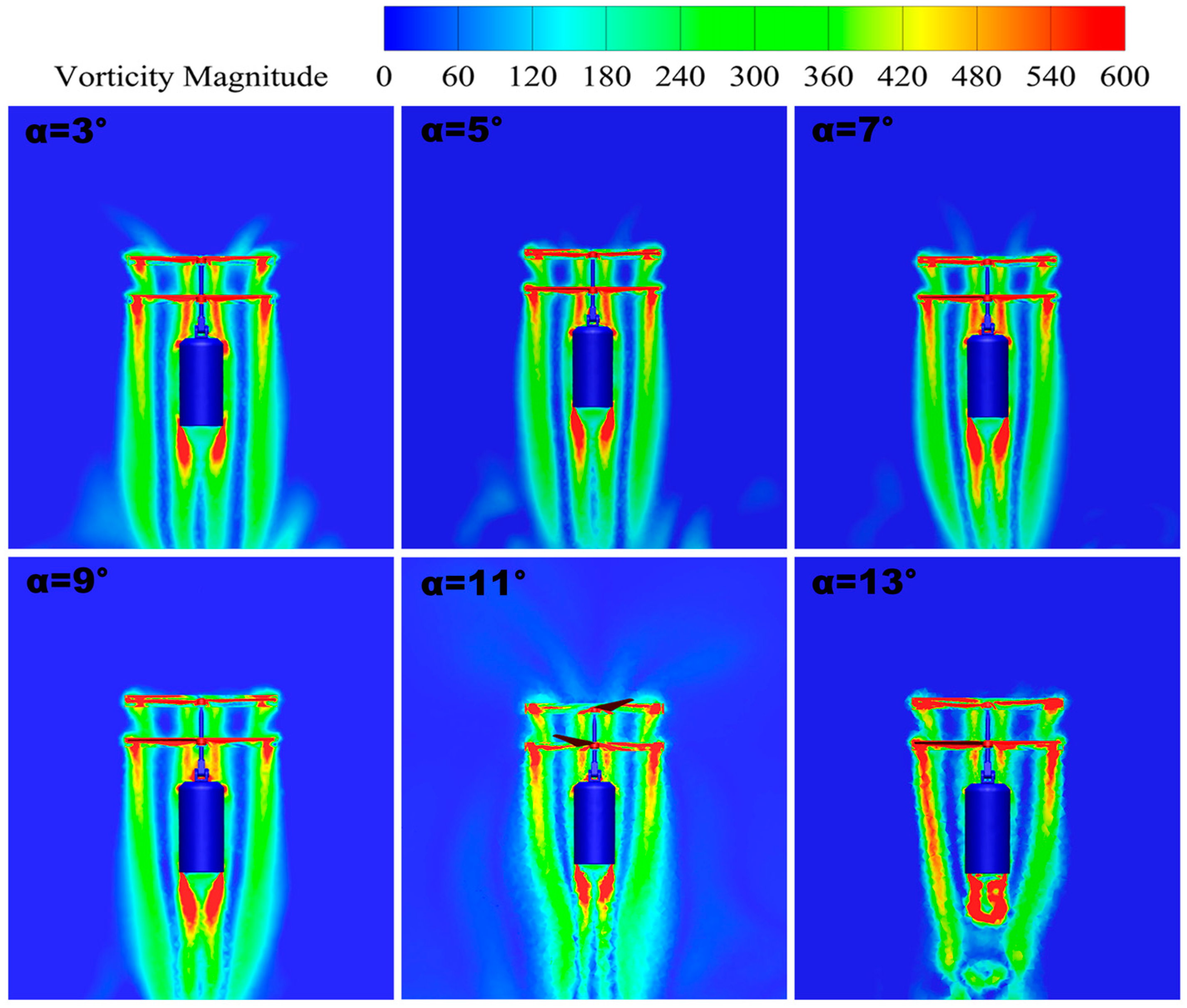
3.2.2. Vorticity Distribution
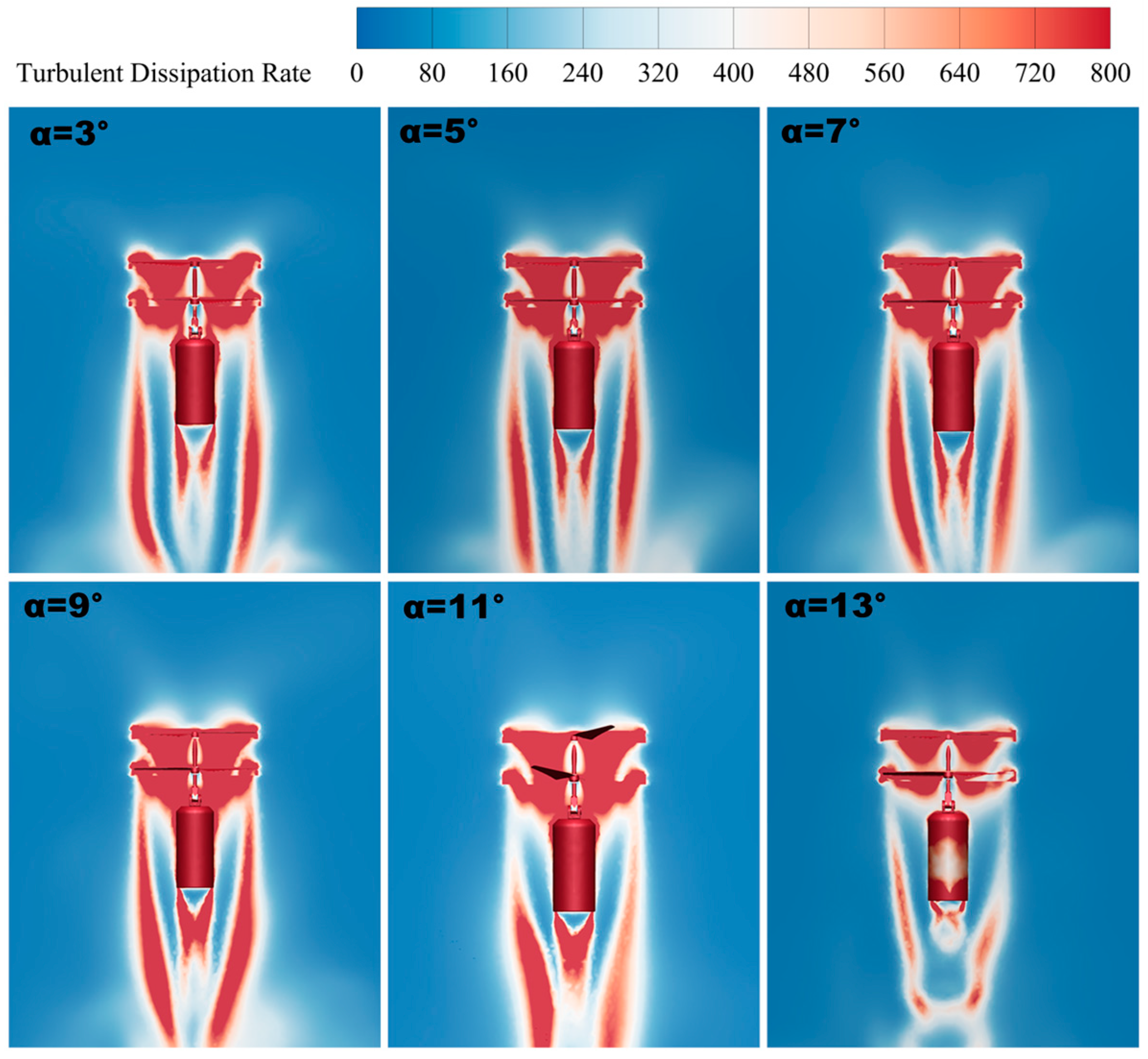
3.2.3. Turbulent Dissipation Rate
3.3. Effect of Load Thrust
4. Conclusions
- (1)
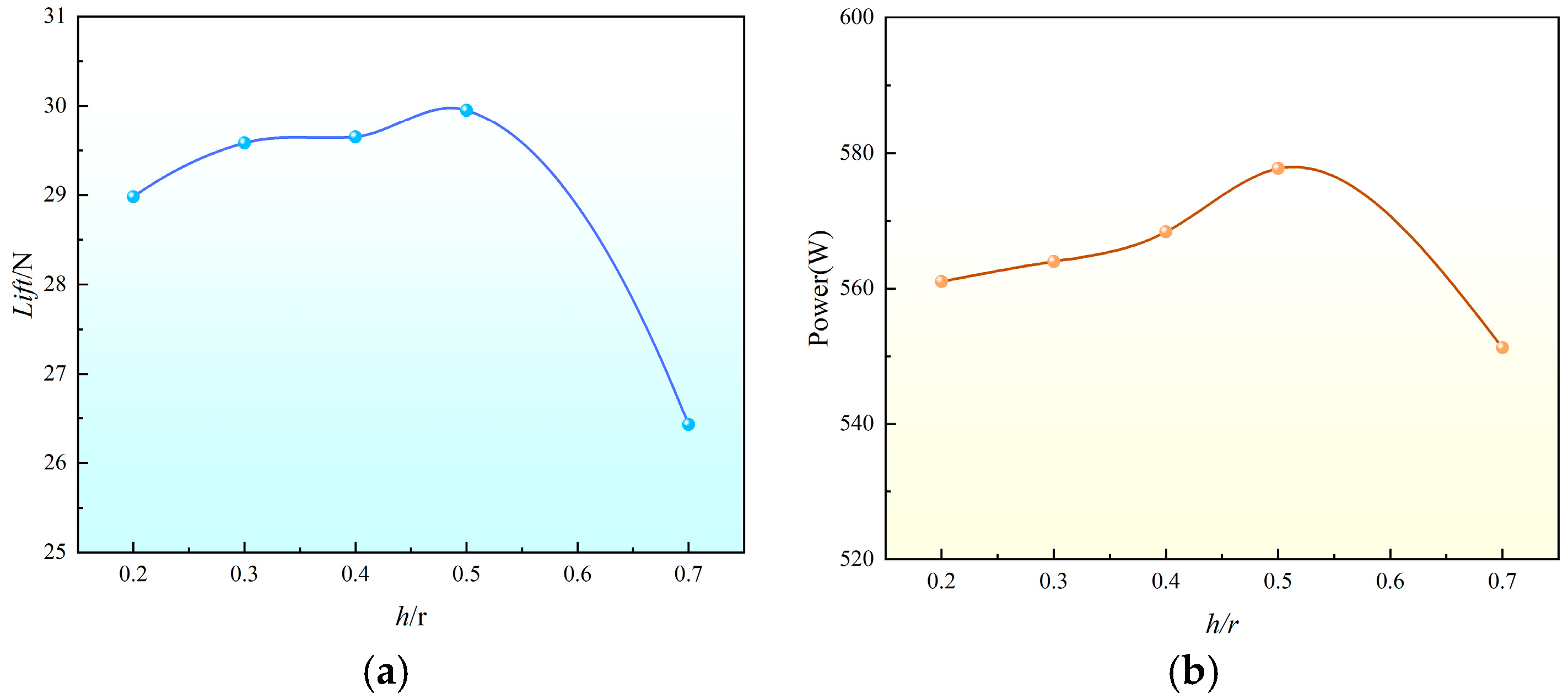
- Different rotor spacings of a UAV will affect its overall aerodynamic performance, and too large or too small a spacing is not conducive to the stabilization of its aerodynamic performance. When the rotor spacing ratio is h/R = 0.5, the rotor lift and the overall aerodynamic performance have obvious advantages. The optimum rotor spacing is determined to be h = 0.5 R.
- (2)
- In the initial state, when performing the attitude adjustment process, the load thrust increases significantly when the initial tilt angle is δ = 9, being 439% higher than that at a tilt angle of δ = 3°. A larger load thrust facilitates the transition mode attitude adjustment and changeover.
- (3)
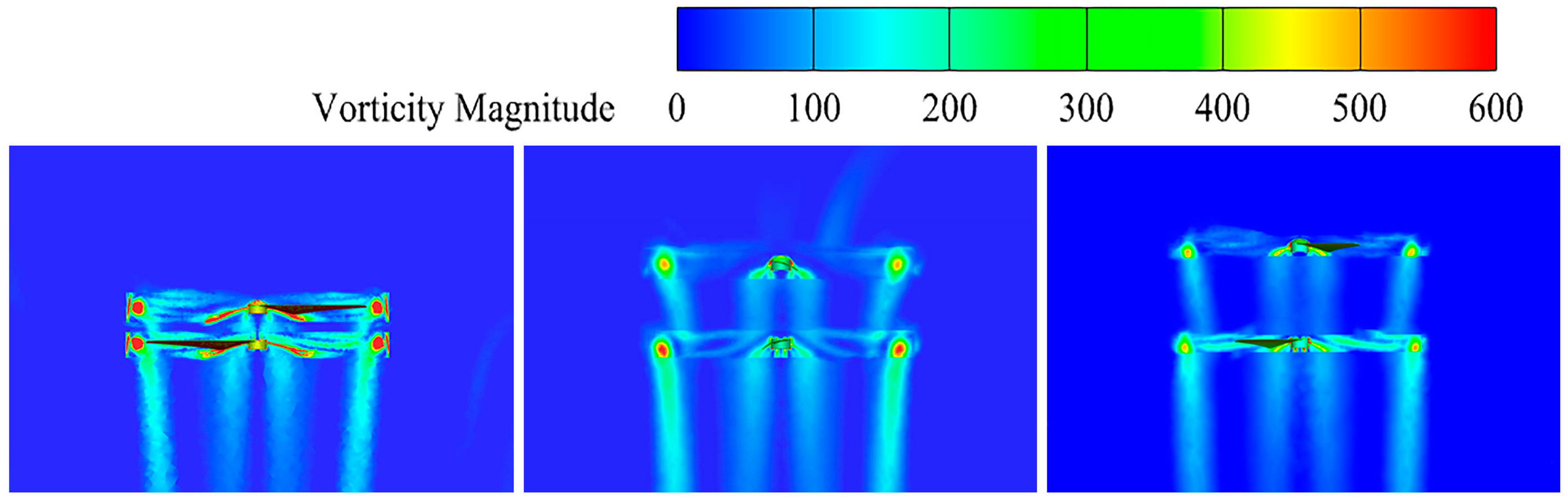
- When the initial tilt angle is δ = 9°, the wing tip velocity reaches the maximum value of 77.9 m/s, which is 15% and 35% higher than that at δ = 3 and δ = 13°, respectively. In addition, the vortex flow is smoother and more uniformly and neatly distributed, and the disturbance of the twin-rotor wingtip vortex is relatively weak; meanwhile, with a high turbulent dissipation rate, the rotor layout is also more efficient.
- (4)
- By considering the influence of the change in the initial tilt angle on the load thrust and aerodynamic parameters, it is found that, when the initial tilt angle is δ = 9, the aerodynamic layout is reasonable, the load thrust is larger, and the aerodynamic characteristics are optimized. The optimal initial tilt angle is determined to be δ = 9°. This conclusion is of guiding significance for the design and optimization of UAVs, aiding in improving their flight stability, maneuverability, and efficiency, and provides strong support for the development and application of UAV technology.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yan, B.; Cheng, P.; Cai, C. Aerodynamic structural design and control for a new miniature coaxial dual-rotor unmanned aerial vehicle. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2023, 237, 1335–1348. [Google Scholar] [CrossRef]
- Yashwanth, C.; Anushkka, V.; Datthathireyan, K.D.; Srinithi, M.; Aamir, H.; Kumar, G.D.; Arulmozhi, K. Computational Fluid Dynamics Analysis of a Coaxial Unmanned Aerial Vehicle; SAE Technical Paper 2023-01-5172; SAE International: Warrendale, PA, USA, 2024. [Google Scholar]
- Zhang, H.; Li, B.; Li, B.; Yang, C. Influence of Propeller Parameters on the Aerodynamic Performance of Shrouded Coaxial Dual Rotors in Hover. Aerospace 2023, 10, 859. [Google Scholar] [CrossRef]
- Muresan, B.; Folea, S.; Nascu, I.; Ionescu, C.; De Keyser, R. Identification and modeling of the three rotational movements of a miniature coaxial helicopter. Simulation 2013, 89, 1490–1504. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, B.; Cui, X.; Li, Y.; Yang, Y.; Lyu, Z. The Application of Micro Coaxial Rotorcraft in Warfare: An Overview, Key Technologies, and Warfare Scenarios. IEEE Access 2022, 10, 40358–40366. [Google Scholar] [CrossRef]
- You, D.; Hao, Y.; Xu, J.; Yang, L. Research on Attitude Detection and Flight Experiment of Coaxial Twin-Rotor UAV. Sensors 2022, 22, 9572. [Google Scholar] [CrossRef]
- Hayami, K.; Sugawara, H.; Yumino, T.; Tanabe, Y.; Kameda, M. CFD analysis on the performance of a coaxial rotor with lift offset at high advance ratios. Aerosp. Sci. Technol. 2023, 135, 108194. [Google Scholar] [CrossRef]
- Lv, Z.-Y.; Wu, Y.; Zhao, Q.; Sun, X.-M. Design and Control of a Novel Coaxial Tilt-Rotor UAV. IEEE Trans. Ind. Electron. 2022, 69, 3810–3821. [Google Scholar] [CrossRef]
- Vuruskan, A.; Yuksek, B.; Ozdemir, U.; Yukselen, A.; Inalhan, G. Dynamic modeling of a fixed-wing VTOL UAV. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 483–491. [Google Scholar]
- Öner, K.T.; Cetinsoy, E.; Sirimoglu, E.; Hancer, C.; Unel, M.; Aksit, M.F.; Gulez, K.; Kandemir, I. Mathematical modeling and vertical flight control of a tilt-wing UAV. Turk. J. Electr. Eng. Comput. Sci. 2012, 20, 149–157. [Google Scholar] [CrossRef]
- Li, P.; Zhao, Q.; Zhu, Q. CFD calculations on the unsteady aerodynamic characteristics of a tilt-rotor in a conversion mode. Chin. J. Aeronaut. 2015, 28, 1593–1605. [Google Scholar] [CrossRef]
- Bayati, I.; Belloli, M.; Bernini, L.; Zasso, A. Aerodynamic design methodology for wind tunnel tests of wind turbine rotors. J. Wind. Eng. Ind. Aerodyn. 2017, 167, 217–227. [Google Scholar] [CrossRef]
- Rajendran, P.; Jayaprakash, A. Numerical performance analysis of a twin blade drone rotor propeller. Mater. Today Proc. 2023, 80, 492–498. [Google Scholar] [CrossRef]
- Koehl, A.; Rafaralahy, H.; Boutayeb, M.; Martinez, B. Aerodynamic Modelling and Experimental Identification of a Coaxial-Rotor UAV. J. Intell. Robot. Syst. 2012, 68, 53–68. [Google Scholar] [CrossRef]
- Gromke, C.C.; Ruck, B. Aerodynamic modelling of trees for small-scale wind tunnel studies. Forestry 2008, 81, 243–258. [Google Scholar] [CrossRef]
- Wang, Z.; Gu, W.B.; Yuan, Q.; Zhu, Y. Aerodynamic Layout Design and Internet of Things Control Simulation of Micro-Sized Coaxial Twin-Rotor Flight System. IEEE Sens. J. 2021, 21, 25206–25213. [Google Scholar] [CrossRef]
- Hua, X.; Shao, W.; Zhang, C.; Zhang, Z.Q. Based on Imitation Seagull Airfoil UVA Wing Numerical Simulation. Appl. Mech. Mater. 2012, 271–272, 791–796. [Google Scholar] [CrossRef]
- Howell, R.; Qin, N.; Edwards, J.; Durrani, N. Wind tunnel and numerical study of a small vertical axis wind turbine. Renew. Energy 2010, 35, 412–422. [Google Scholar] [CrossRef]
- Shukla, D.; Komerath, N. Multirotor Drone Aerodynamic Interaction Investigation. Drones 2018, 2, 43. [Google Scholar] [CrossRef]
- Lee, H.; Lee, D.-J. Rotor interactional effects on aerodynamic and noise characteristics of a small multirotor unmanned aerial vehicle. Phys. Fluids 2020, 32, 047107. [Google Scholar] [CrossRef]
- Lee, J.; Yee, K.; Oh, S. Aerodynamic Characteristic Analysis of Multi-Rotors Using a Modified Free-Wake Method. Trans. Jpn. Soc. Aeronaut. Space Sci. 2009, 52, 168–179. [Google Scholar] [CrossRef]
- Kim, W.-Y.; Senguttuvan, S.; Kim, S.-M. Effect of Rotor Spacing and Duct Diffusion Angle on the Aerodynamic Performances of a Counter-Rotating Ducted Fan in Hover Mode. Processes 2020, 8, 1338. [Google Scholar] [CrossRef]
- Zhou, C.; Chen, M. Computational fluid dynamics trimming of helicopter rotor in forward flight. Adv. Mech. Eng. 2020, 12, 1687814020925252. [Google Scholar] [CrossRef]
- Farrokhfal, H.; Pishevar, A. A New Coupled Free Wake-CFD Method for Calculation of Helicopter Rotor Flow-Field in Hover. J. Aerosp. Technol. Manag. 2014, 6, 129–147. [Google Scholar] [CrossRef]
- Lei, Y.; Wang, J.; Yang, W. Aerodynamic performance of a non-planar multi-rotor air-craft in hover. J. Mech. Sci. Technol. 2023, 37, 2933–2940. [Google Scholar] [CrossRef]
- Klimchenko, V.; Baeder, J.D. CFD/CSD Study of Interactional Aerodynamics of a Coaxial Compound Helicopter in High-Speed Forward Flight. AIAA 2020-0304. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Potsdam, M.; Strawn, R.C. CFD Simulations of Tiltrotor Configurations in Hover. J. Am. Helicopter Soc. 2005, 50, 82–94. [Google Scholar] [CrossRef]
- Fengbo, Y.; Xinyu, X.; Ling, Z.; Zhu, S. Numerical simulation and experimental verification on downwash air flow of six-rotor agricultural unmanned aerial vehicle in hover. Int. J. Agric. Biol. Eng. 2017, 10, 41–53. [Google Scholar] [CrossRef]
- Yoon, S.; Nasa Diaz, P.V.; Boyd, D.D.; Chan, W.M.; Theodore, C.R. Computational Aerodynamic Modeling of Small Quadcopter Vehicles. In Proceedings of the American Helicopter Society (AHS) 73rd Annual Forum Fort Worth, Fort Worth, TX, USA, 9–11 May 2017. [Google Scholar]
- Zawodny, N.S.; Boyd Jr, D.D.; Burley, C.L. Acoustic characterization and prediction of representative, small-scale rotary-wing unmanned aircraft system components. In Proceedings of the American Helicopter Society (AHS) Annual Forum (No. NF1676L-22587), West Palm Beach, FL, USA, 17–19 May 2016. [Google Scholar]
- Cornelius, J.K.; Kinzel, M.P.; Schmitz, S. Efficient CFD approaches for coaxial rotor simulations. In Proceedings of the AIAA Scitech 2019 Forum (AIAA Scitech 2019 Forum), San Diego, CA, USA, 7–11 January 2019; American Institute of Aeronautics and Astronautics Inc., AIAA: Reston, VA, USA, 2019. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, W.; Tan, X.; Liu, X.; Luo, A.; Niu, L. Aerodynamic Analysis of Rotor Spacing and Attitude Transition in Tilt-Powered Coaxial Rotor UAV. Sensors 2024, 24, 7115. https://doi.org/10.3390/s24227115
Wu W, Tan X, Liu X, Luo A, Niu L. Aerodynamic Analysis of Rotor Spacing and Attitude Transition in Tilt-Powered Coaxial Rotor UAV. Sensors. 2024; 24(22):7115. https://doi.org/10.3390/s24227115
Chicago/Turabian StyleWu, Wei, Xinyu Tan, Xing Liu, Angang Luo, and Lanjie Niu. 2024. "Aerodynamic Analysis of Rotor Spacing and Attitude Transition in Tilt-Powered Coaxial Rotor UAV" Sensors 24, no. 22: 7115. https://doi.org/10.3390/s24227115
APA StyleWu, W., Tan, X., Liu, X., Luo, A., & Niu, L. (2024). Aerodynamic Analysis of Rotor Spacing and Attitude Transition in Tilt-Powered Coaxial Rotor UAV. Sensors, 24(22), 7115. https://doi.org/10.3390/s24227115