

Remote Sensing Evaluation Drone Herbicide Application Effectiveness for Controlling Echinochloa spp. in Rice Crop in Valencia (Spain)

 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
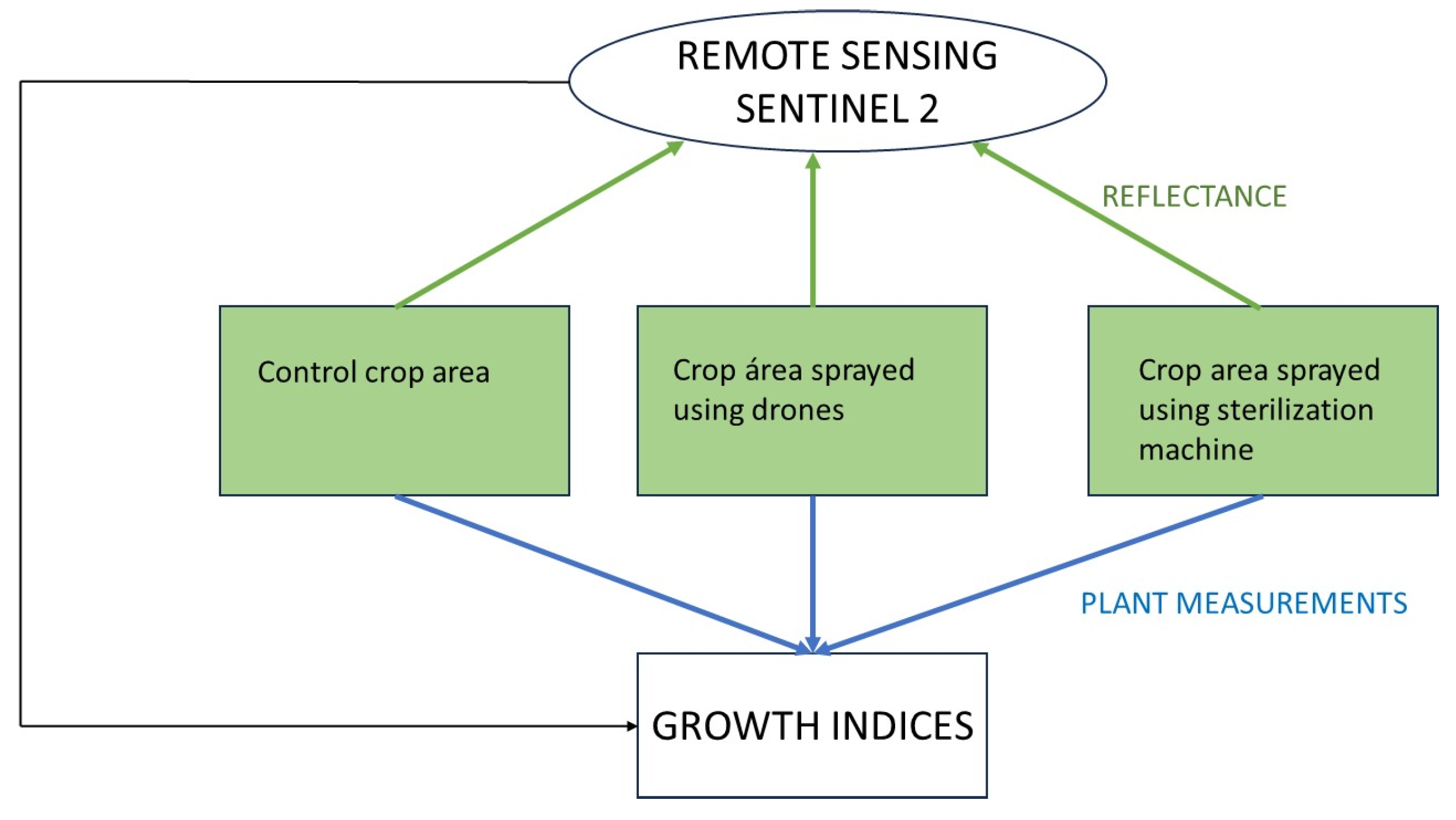
2.1. Design of the Experiment
2.2. Application Equipment
2.3. Monitoring Using Sentinel-2 Images
2.4. Plant Measurements
3. Results
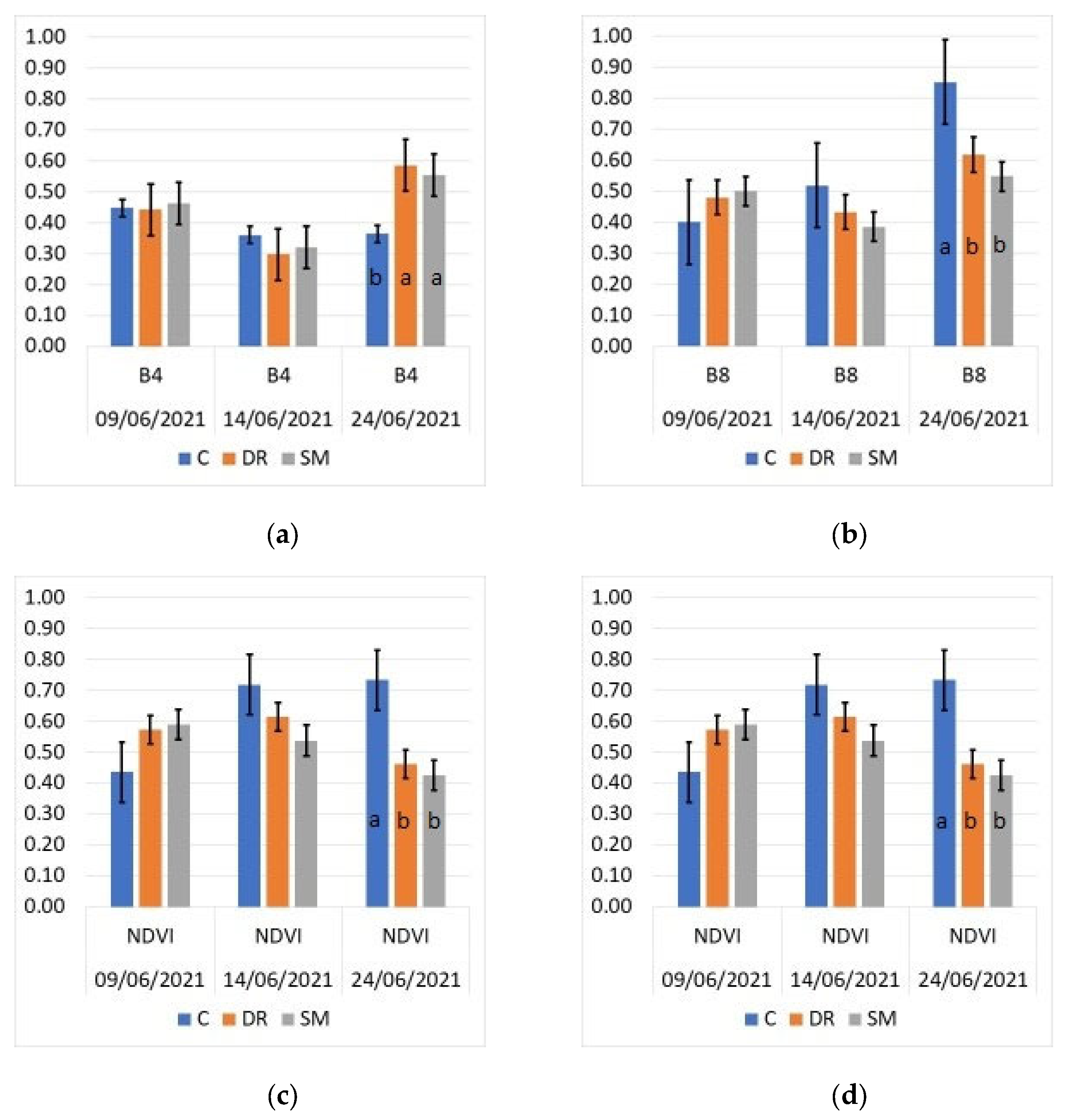
3.1. Remote Sensing Data
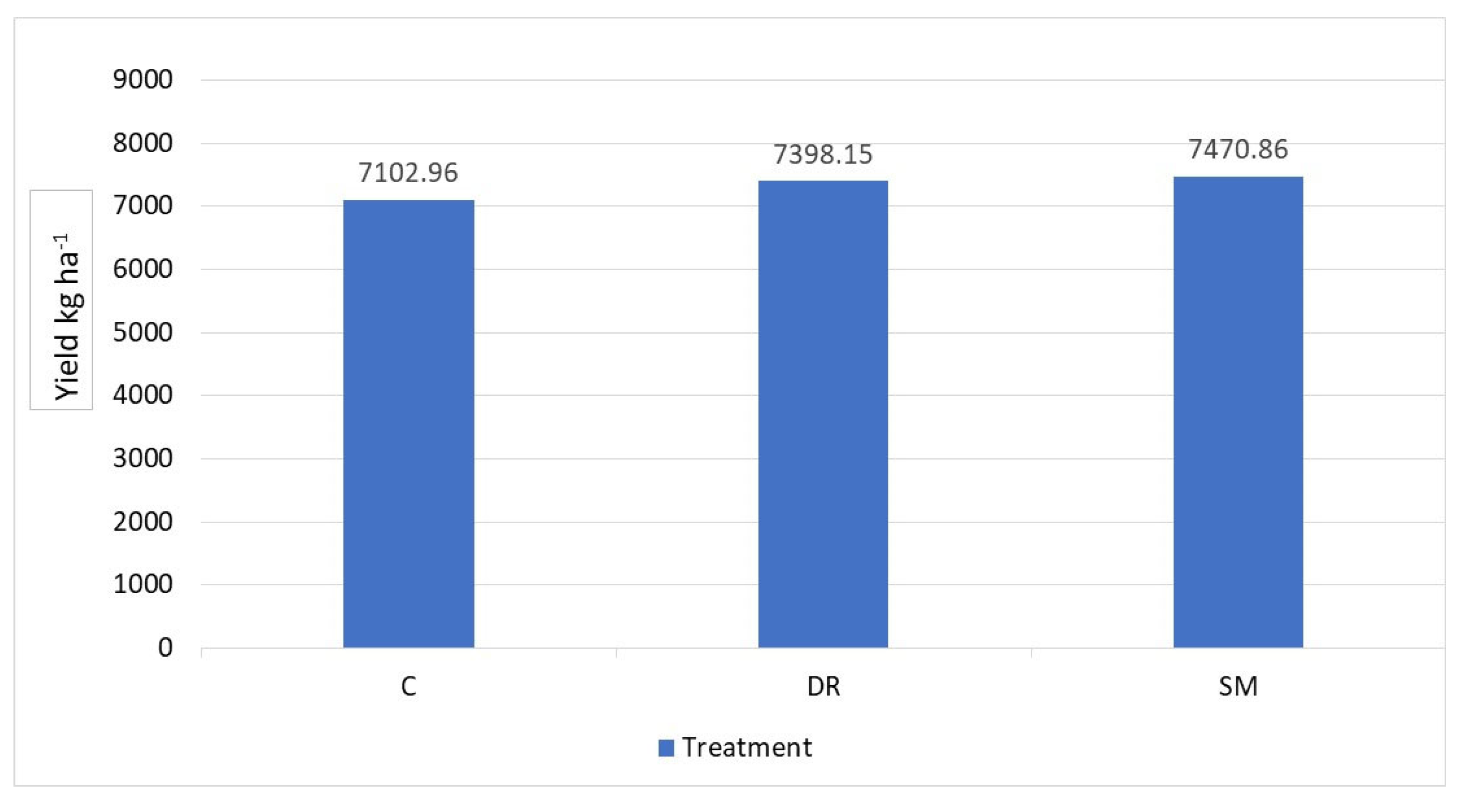
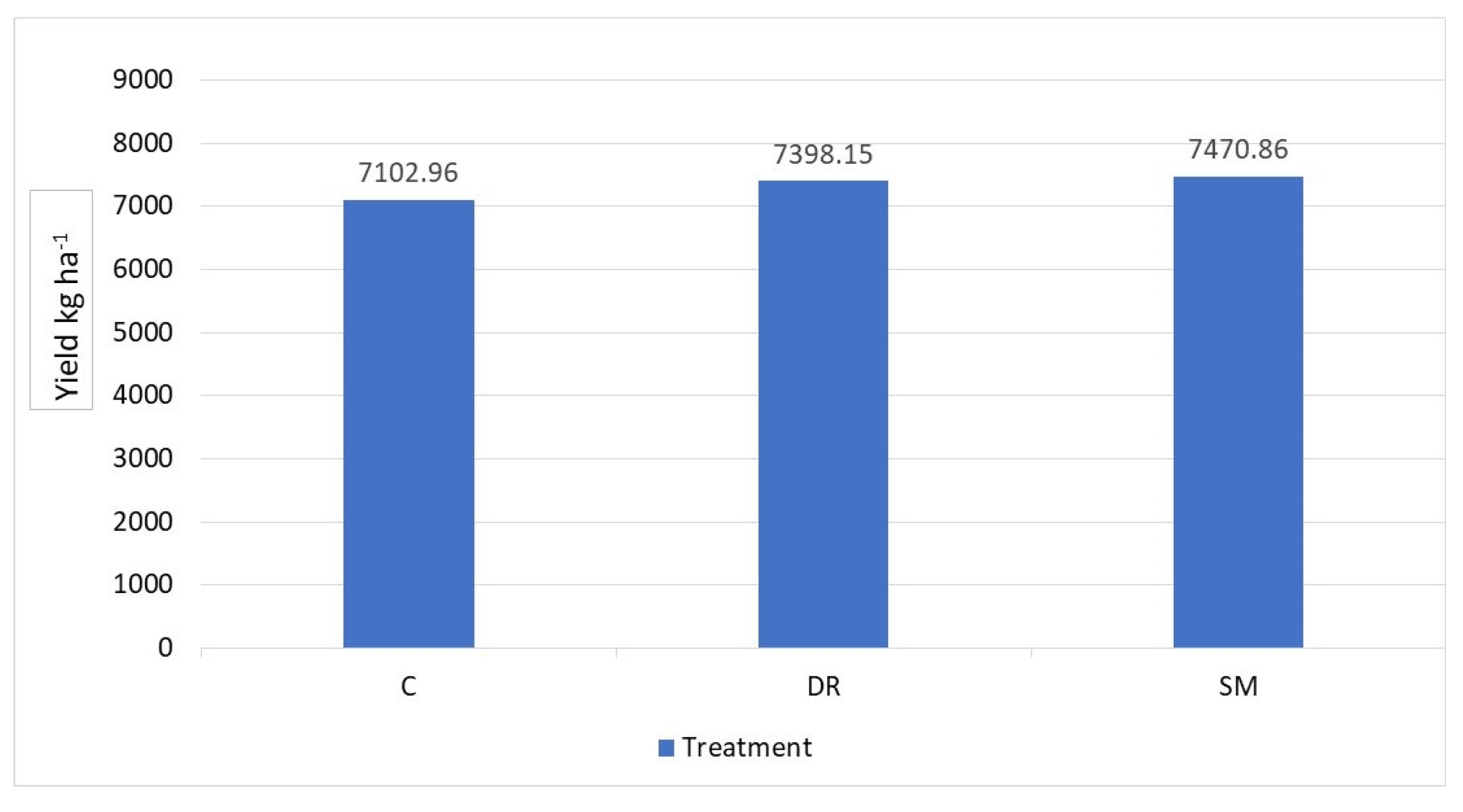
3.2. Biomass and Growth Indexes in Rice Plants
3.3. SPAD Index and Pigment Concentration in Rice Plants
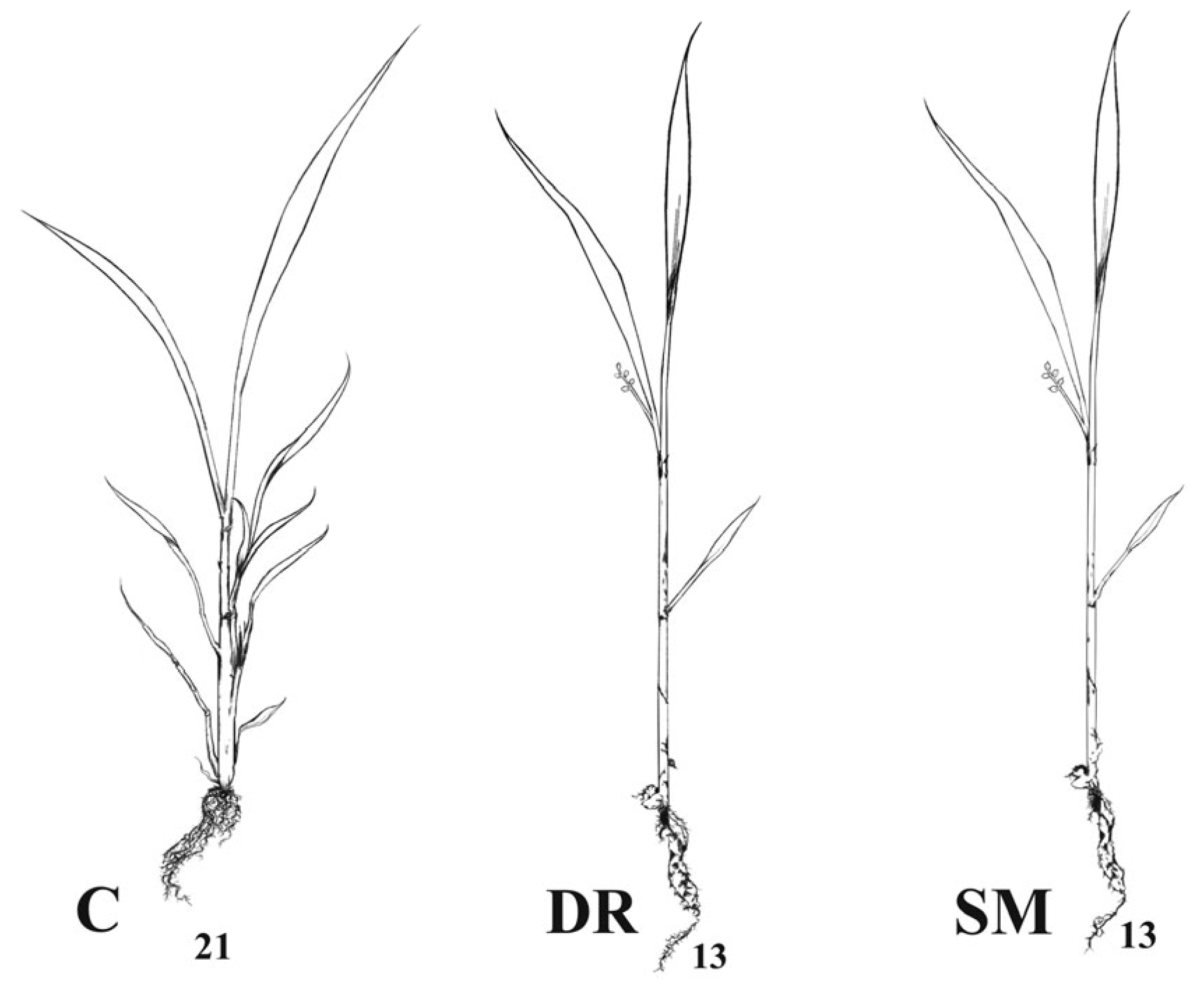
3.4. Growth Kinetics of Echinochloa spp.
3.5. Phenological Stage
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bhandari, H. Global rice production, consumption and trade: Trends and future directions. In Proceedings of the Korean Society of Crop Science Conference, Jinju, Korea, 30 September 2019; p. 5. [Google Scholar]
- FAOSTAT. 2022. Available online: https://www.fao.org/faostat/es/#home (accessed on 6 July 2023).
- MAPA. Ministerio de Agricultura, Pesca y Alimentación. 2022. Available online: https://www.mapa.gob.es/es/default.aspx (accessed on 9 April 2022).
- Oerke, E.C. Crop losses to pests. J. Agric. Sci. 2006, 144, 31–43. [Google Scholar] [CrossRef]
- Buchanan, G.A.; Burns, E.R. Influence of weed competition on cotton. Weed Sci. 1970, 18, 149–154. [Google Scholar] [CrossRef]
- Cousens, R. A simple model relating yield loss to weed density. Ann. Appl. Biol. 1985, 107, 239–252. [Google Scholar] [CrossRef]
- Barbaś, P.; Sawicka, B.; Marczak, B.K.; Pszczółkowski, P. Effect of mechanical and herbicide treatments on weed densities and biomass in two potato cultivars. Agriculture 2020, 10, 455. [Google Scholar] [CrossRef]
- Hasan, M.; Ahmad-Hamdani, M.S.; Rosli, A.M.; Hamdan, H. Bioherbicides: An eco-friendly tool for sustainable weed management. Plants 2021, 10, 1212. [Google Scholar] [CrossRef] [PubMed]
- Mahé, I.; Cordeau, S.; Bohan, D.A.; Derrouch, D.; Dessaint, F.; Millot, D.; Chauvel, B. Soil seedbank: Old methods for new challenges in agroecology. Ann. Appl. Biol. 2021, 178, 23–38. [Google Scholar] [CrossRef]
- Srinivasan, R.; Cervantes, F.A.; Alvarez, J.M. Aphid-borne virus dynamics in the potato-weed pathosystem. In Insect Pests of Potato, Chapter 11; Academic Press: Cambridge, MA, USA, 2013; pp. 311–337. [Google Scholar]
- Westwood, J.H.; Charudattan, R.; Duke, S.O.; Fennimore, S.A.; Marrone, P.; Slaughter, D.C.; Swanton, C.; Zollinger, R. Weed management in 2050: Perspectives on the future of weed science. Weed Sci. 2018, 66, 275–285. [Google Scholar] [CrossRef]
- Ferrero, A. Weedy rice, biological features and control. FAO Plant Prod. Prot. Pap. 2003, 120, 89–107. [Google Scholar]
- Brookes, G.; Barfoot, P. GM Rice: Will This Lead the Way for Global Acceptance of GM Crop Technology; ISAAA Briefs, PG Economics Report Made Available to ISAAA for Publication, Number 28; ISAAA: Ithaca, NY, USA, 2003. [Google Scholar]
- Dass, A.; Shekhawat, K.; Choudhary, A.K.; Sepat, S.; Rathore, S.S.; Mahajan, G.; Chauhan, B.S. Weed management in rice using crop-competition. Crop Prot. 2017, 95, 45–52. [Google Scholar] [CrossRef]
- Gharde, Y.; Singh, P.K. Yield and Economic losses due to weeds in India. Crop Prot. 2018, 107, 12–18. [Google Scholar] [CrossRef]
- Kraehmer, H.; Thomas, C.; Vidotto, F. Rice Production in Europe. In Rice Production Worldwide; Springer International Publishing: Berlin/Heidelberg, Germany, 2017; pp. 93–116. [Google Scholar]
- Registro de Productos Fitosanitarios—Agricultura—Mapa.gob.es. 2022. Available online: https://www.mapa.gob.es/es/agricultura/temas/sanidad-vegetal/productos-fitosanitarios/registro/menu.asp (accessed on 6 July 2023).
- Martin, D.; Singh, V.; Latheef, M.A.; Bagavathiannan, M. Spray deposition on weeds (Palmer amaranth and morningglory) from a remotely piloted aerial application system and backpack sprayer. Drones 2020, 4, 59. [Google Scholar] [CrossRef]
- Qin, W.C.; Qiu, B.J.; Xue, X.Y.; Chen, C.; Xu, Z.F.; Zhou, Q.Q. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 2016, 85, 79–88. [Google Scholar] [CrossRef]
- Parcs Naturals de la Comunitat Valenciana—Parques Naturales—Generalitat Valenciana. 2022. Available online: https://parquesnaturales.gva.es/va/ (accessed on 6 July 2023).
- Espacios Red Natura 2000—Red Natura 2000—Generalitat Valenciana. 2022. Available online: https://agroambient.gva.es/es/web/red-natura-2000/espacios-red-natura-2000 (accessed on 6 July 2023).
- The Spanish Ramar List. 2022. Available online: https://www.miteco.gob.es/es/biodiversidad/temas/ecosistemas-y-conectividad/conservacion-de-humedales/ch_hum_ramsar_esp_lista.aspx (accessed on 6 July 2023).
- Osca Lluch, J.M. Cultivos Herbaceos Extensivos: Cereales; Editorial de la Universidad Politecnica de València: València, Spain, 2013. [Google Scholar]
- Raj, R.; Kar, S.; Nandan, R.; Jagarlapudi, A. Precision agriculture and unmanned aerial Vehicles (UAVs). In Unmanned Aerial Vehicle: Applications in Agriculture and Environment; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 7–23. [Google Scholar]
- Sato, A. The rmax Helicopter Uav; National Technical Information Service: Alexandria, VA, USA, 2003. [Google Scholar]
- Cavalaris, C.; Karamoutis, C.; Markinos, A. Efficacy of cotton harvest aids applications with unmanned aerial vehicles (UAV) and ground-based field sprayers—A case study comparison. Smart Agric. Technol. 2022, 2, 100047. [Google Scholar] [CrossRef]
- Wang, G.; Lan, Y.; Yuan, H.; Qi, H.; Chen, P.; Ouyang, F.; Han, Y. Comparison of spray deposition, control efficacy on wheat aphids and working efficiency in the wheat field of the unmanned aerial vehicle with boom sprayer and two conventional knapsack sprayers. Appl. Sci. 2019, 9, 218. [Google Scholar] [CrossRef]
- Pranaswi, D.; Jagtap, M.P.; Asewar, B.V.; Gokhale, D.N.; Shinde, G.U. Weed control efficiency with herbicide application by the combination of Drone and Knapsack sprayer in wheat (Triticum aestivum L.). Pharma Innov. 2022, 11, 741–744. [Google Scholar]
- Supriya, C.; MuraliArthanari, P.; Kumaraperumal, R.; Sivamurugan, A.P. Optimization of Spray Fluid for Herbicide Application for Drones in Irrigated Maize (Zea mays L.). Int. J. Plant Soil Sci. 2021, 33, 137–145. [Google Scholar] [CrossRef]
- Ahmad, F.; Qiu, B.; Dong, X.; Ma, J.; Huang, X.; Ahmed, S.; Ali Chandio, F. Effect of operational parameters of UAV sprayer on spray deposition pattern in target and off-target zones during outer field weed control application. Comput. Electron. Agric. 2020, 172, 105350. [Google Scholar] [CrossRef]
- Zhang, H.; Qi, L.; Wu, Y.; Musiu, E.M.; Cheng, Z.; Wang, P. Numerical simulation of airflow field from a six–rotor plant protection drone using lattice Boltzmann method. Biosyst. Eng. 2020, 197, 336–351. [Google Scholar] [CrossRef]
- Li, L.; Fan, Y.; Huang, X.; Tian, L. Real-time UAV Weed Scout for Selective Weed Control by Adaptive Robust Control and Machine Learning Algorithm. In Proceedings of the 2016 American Society of Agricultural and Biological Engineers Annual International Meeting, as ABE 2016, Orlando, FL, USA, 17–20 July 2016. [Google Scholar]
- Mattivi, P.; Pappalardo, S.E.; Nikolić, N.; Mandolesi, L.; Persichetti, A.; De Marchi, M.; Masin, R. Can Commercial Low-Cost Drones and Open-Source GIS Technologies Be Suitable for Semi-Automatic Weed Mapping for Smart Farming? A Case Study in NE Italy. Remote Sens. 2021, 13, 1869. [Google Scholar] [CrossRef]
- Malenovsky, Z.; Lucieer, A.; King, D.H.; Turnbull, J.D.; Robinson, S.A. Unmanned Aircraft System Advances Health Mapping of Fragile Polar Vegetation. Methods Ecol. Evol. 2017, 8, 1842–1857. [Google Scholar] [CrossRef]
- CORTEVA. 2021. Available online: https://www.corteva.es/ (accessed on 10 April 2022).
- Blanco Alibés, O. Agronomía del Cultivo del Arroz en Riego por Aspersión: Variedades, Riego, Fertilización y Control de Malas Hierbas. Ph.D. Thesis, Universitat de Lleida, Lleida, Spain, 30 June 2014. [Google Scholar]
- Taberner, A. Manejo de poblaciones resistentes con herbicidas en los cultivos de cereales de invierno, maíz y arroz. In Proceedings of the Seminario—Taller Internacional sobre Resistencia a Herbicidas y Cultivos Transgénicos, Colonia, Uruguay, 6–8 December 2005. [Google Scholar]
- Copernicus Open Access Hub. 2021. Available online: https://scihub.copernicus.eu/ (accessed on 26 July 2021).
- Xue, J.; Su, B. Significant Remote Sensing Vegetation Indices: A Review of Developments and Applications. J. Sens. 2017, 2017, 1353691. [Google Scholar] [CrossRef]
- Franch, B.; Bautista, A.S.; Fita, D.; Rubio, C.; Tarrazó-Serrano, D.; Sánchez, A.; Skakun, S.; Vermote, E.; Becker-Reshef, I.; Uris, A. Within-Field Rice Yield Estimation Based on Sentinel-2 Satellite Data. Remote Sens. 2021, 13, 4095. [Google Scholar] [CrossRef]
- Parry, C.; Blonquist, J.M.; Bugbee, B. In situ measurement of leaf chlorophyll concentration: Analysis of the optical/absolute relationship. Plant Cell Environ. 2014, 37, 2508–2520. [Google Scholar] [CrossRef]
- Porra, R.J.; Thompson, W.A.; Kriedemann, P.E. Determination of accurate extinction coefficients and simultaneous equations for assaying chlorophylls a and b extracted with four different solvents: Verification of the concentration of chlorophyll standards by atomic absorption spectroscopy. Biochim. Biophys. Acta Bioenerg. 1989, 975, 384–394. [Google Scholar] [CrossRef]
- Blackman, V.H. The Compound Interest Law and Plant Growth. Ann. Bot. 1919, 975, 353–360. [Google Scholar] [CrossRef]
- Pascual-Seva, N.; Pascual, B.; San Bautista, A.; López-Galarza, S.; Maroto, J.V. Growth and nutrient absorption in chufa (Cyperus esculentus L. var. sativus Boeck.) in soilless culture. J. Hortic. Sci. Biotechnol. 2009, 84, 393–398. [Google Scholar]
- Enz, M.; Dachler, C. Compendio Para la Identificación de los Estadios Fenológicos de Especies Mono- y Dicotiledóneas Cultivadas Escala BBCH Extendida; BBA: Limburgerhof, Germany, 1998; p. 123. [Google Scholar]
- Tucker, C.J. Red and Photographic Infrared Linear Combinations for Monitoring Vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Hatfield, J.L.; Gitelson, A.A.; Schepers, J.S.; Walthall, C.L. Application of Spectral Remote Sensing for Agronomic Decisions. Agron. J. 2008, 100, 117–131. [Google Scholar] [CrossRef]
- Yoder, B.J.; Waring, R.H. The Normalized Difference Vegetation Index of Small Douglas-Fir Canopies with Varying Chlorophyll Concentrations. Remote Sens. Environ. 1994, 49, 81–91. [Google Scholar] [CrossRef]
- Bonny, S. Genetically modifed herbicide-tolerant crops, weeds, and herbicides: Overview and impact. Environ. Manag. 2016, 57, 31–48. [Google Scholar] [CrossRef]
- Rose, M.T.; Cavagnaro, T.R.; Scanlan, C.A.; Rose, T.J.; Vancov, T.; Kimber, S.; Kennedy, I.R.; Kookana, R.S.; Van Zwieten, L. Impact of Herbicides on Soil Biology and Function. In Advances in Agronomy; Sparks, D.L., Ed.; Academic Press: Cambridge, MA, USA, 2016; pp. 133–220. [Google Scholar]
- Kriegler, F.J.; Malila, W.A.; Nalepka, R.F.; Richardson, W. Preprocessing transformations and their effect on multispectral recognition. Remote Sens. Environ. 1969, VI, 97–132. [Google Scholar]
- Asrar, G.; Fuchs, M.; Kanemasu, E.T.; Hatfield, J.L. Estimating absorbed photosynthetic radiation and leaf area index from spectral reflectance in wheat. Agron. J. 1984, 76, 300–306. [Google Scholar] [CrossRef]
- Jeevan, N.; Pazhanivelan, S.; Kumaraperumal, R.; Ragunath, K.; Arthanari, P.M.; Sritharan, N.; Karthikkumar, A.; Manikandan, S. Effect of different herbicide spray volumes on weed control efficiency of a battery-operated Unmanned aerial vehicle sprayer in transplanted rice (Oryza sativa L.). J. Appl. Nat. Sci. 2023, 15, 972–977. [Google Scholar] [CrossRef]
- Naveen, L.; Spandana Bhatt, P.; Bhanu Rekha, K.; Ramprakash, T. Assessment of Post Emergence Herbicide Efficacy for Drone Spraying in Transplanted Rice (Oryza sativa L.). Int. J. Environ. 2023, 13, 3281–3288. [Google Scholar] [CrossRef]
- Ortiz, A.; López, A. Resistencia de Echinochloa coluna (L.) Link al herbicida cyhalotop-butilo en arrozales de Venezuela. Rev. Fac. Agron. 2014, 40, 8. [Google Scholar]
- Planas de Martí, S. Agricultura de precisión y protección de cultivos. Rev. Ing. 2018, 47, 10–19. [Google Scholar] [CrossRef]
- Paul, R.A.I.; Arthanari, P.M.; Pazhanivelan, S.; Kavitha, R.; Djanaguiraman. Drone-based herbicide application for energy saving, higher weed control and economics in direct-seeded rice (Oryza sativa). Indian J. Agric. Sci. 2023, 93, 704–709. [Google Scholar] [CrossRef]
- Hiremath, C.; Khatri, N.; Jagtap, M.P. Comparative studies of knapsack, boom, and drone sprayers for weed management in soybean (Glycine max L.). Environ. Res. 2023, 2023, 117480. [Google Scholar] [CrossRef]
- Mayanquer, D.F. Sistema Autónomo de Pulverización para Fumigación de Plantaciones de Frutilla Asistido por un Drone. Ph.D. Thesis, Universidad Técnica de Ambato, Ambato, Ecuador, 2019. [Google Scholar]
- Esposito, M.; Crimaldi, M.; Cirillo, V.; Sarghini, F.; Maggio, A. Drone and sensor technology for sustainable weed management: A review. Chem. Biol. Technol. 2021, 8, 18. [Google Scholar] [CrossRef]
- Shaner, D.L.; Beckie, H.J. The future for weed control and technology. Pest Manag. Sci. 2014, 70, 1329–1339. [Google Scholar] [CrossRef]
- Mascanzoni, E.; Perego, A.; Marchi, N.; Scarabel, L.; Panozzo, S.; Ferrero, A.; Acutis, M.; Sattin, M. Epidemiology and agronomic predictors of herbicide resistance in rice at a large scale. Agron. Sustain. Dev. 2018, 38, 68. [Google Scholar] [CrossRef]
- Takekawa, J.Y.; Hagani, J.S.; Edmunds, T.J.; Collins, J.M.; Chappell, S.C.; Reynolds, W.H. The Sky is Not the Limit: Use of a Spray Drone for the Precise Application of Herbicide and Control of an Invasive Plant in Managed Wetlands. Remote Sens. 2023, 15, 3845. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bands | Central Wavelength (nm) | Spatial Resolution (m) |
|---|---|---|
| B4-Red | 665 | 10 |
| B8-NIR | 842 | 10 |
| Herbicide Application | Number of Plants m−2 | Dry Weight (g·m−2) | Relative Growth Rate (d−1) | Leaf Area (cm−2·pl−1) |
|---|---|---|---|---|
| Control (C) | 608.00 | 21.31 | 0.2831 | 9.88 |
| Drone (DR) | 604.00 | 18.21 | 0.2962 | 8.30 |
| Spray machine (SM) | 659.67 | 19.04 | 0.2932 | 8.96 |
| Probability | 0.8461 | 0.8457 | 0.6663 | 0.4875 |
| Herbicide Application | SPAD | Carotenoids (mg·g−1) | Chlorophyll | ||
|---|---|---|---|---|---|
| a (mg·g−1) | b (mg·g−1) | Total (mg·g−1) | |||
| Control (C) | 11.48 | 0.071 | 0.238 | 0.120 | 0.343 |
| Drone (DR) | 11.00 | 0.074 | 0.226 | 0.116 | 0.357 |
| Spray machine (SM) | 11.41 | 0.075 | 0.236 | 0.120 | 0.360 |
| Probability | 0.8313 | 0.7813 | 0.8313 | 0.9130 | 0.8831 |
| Herbicide Application | Number of Plants m−2 | Dry Weight (g·m−2) | Relative Growth Rate (d−1) | |||
|---|---|---|---|---|---|---|
| 14 Das | 21 Das | 14 Das | 21 Das | 14 Das | 21 Das | |
| Control (C) | 58.67 a | 62.67 a | 4.60 a | 30.45 a | 0.2745 | 0.2691 |
| Drone (DR) | 26.00 b | 11.33 b | 2.02 b | 5.55 b | 0.3186 | 0.2940 |
| Spray machine (SM) | 16.00 b | 5.00 b | 0.79 b | 2.52 b | 0.3201 | 0.3229 |
| p value | 0.0275 | 0.0462 | 0.0029 | 0.0019 | 0.3399 | 0.4647 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bautista, A.S.; Tarrazó-Serrano, D.; Uris, A.; Blesa, M.; Estruch-Guitart, V.; Castiñeira-Ibáñez, S.; Rubio, C. Remote Sensing Evaluation Drone Herbicide Application Effectiveness for Controlling Echinochloa spp. in Rice Crop in Valencia (Spain). Sensors 2024, 24, 804. https://doi.org/10.3390/s24030804
Bautista AS, Tarrazó-Serrano D, Uris A, Blesa M, Estruch-Guitart V, Castiñeira-Ibáñez S, Rubio C. Remote Sensing Evaluation Drone Herbicide Application Effectiveness for Controlling Echinochloa spp. in Rice Crop in Valencia (Spain). Sensors. 2024; 24(3):804. https://doi.org/10.3390/s24030804
Chicago/Turabian StyleBautista, Alberto San, Daniel Tarrazó-Serrano, Antonio Uris, Marta Blesa, Vicente Estruch-Guitart, Sergio Castiñeira-Ibáñez, and Constanza Rubio. 2024. "Remote Sensing Evaluation Drone Herbicide Application Effectiveness for Controlling Echinochloa spp. in Rice Crop in Valencia (Spain)" Sensors 24, no. 3: 804. https://doi.org/10.3390/s24030804
APA StyleBautista, A. S., Tarrazó-Serrano, D., Uris, A., Blesa, M., Estruch-Guitart, V., Castiñeira-Ibáñez, S., & Rubio, C. (2024). Remote Sensing Evaluation Drone Herbicide Application Effectiveness for Controlling Echinochloa spp. in Rice Crop in Valencia (Spain). Sensors, 24(3), 804. https://doi.org/10.3390/s24030804