

A Data-Mining Interpretation Method of Pavement Dynamic Response Signal by Combining DBSCAN and Findpeaks Function



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
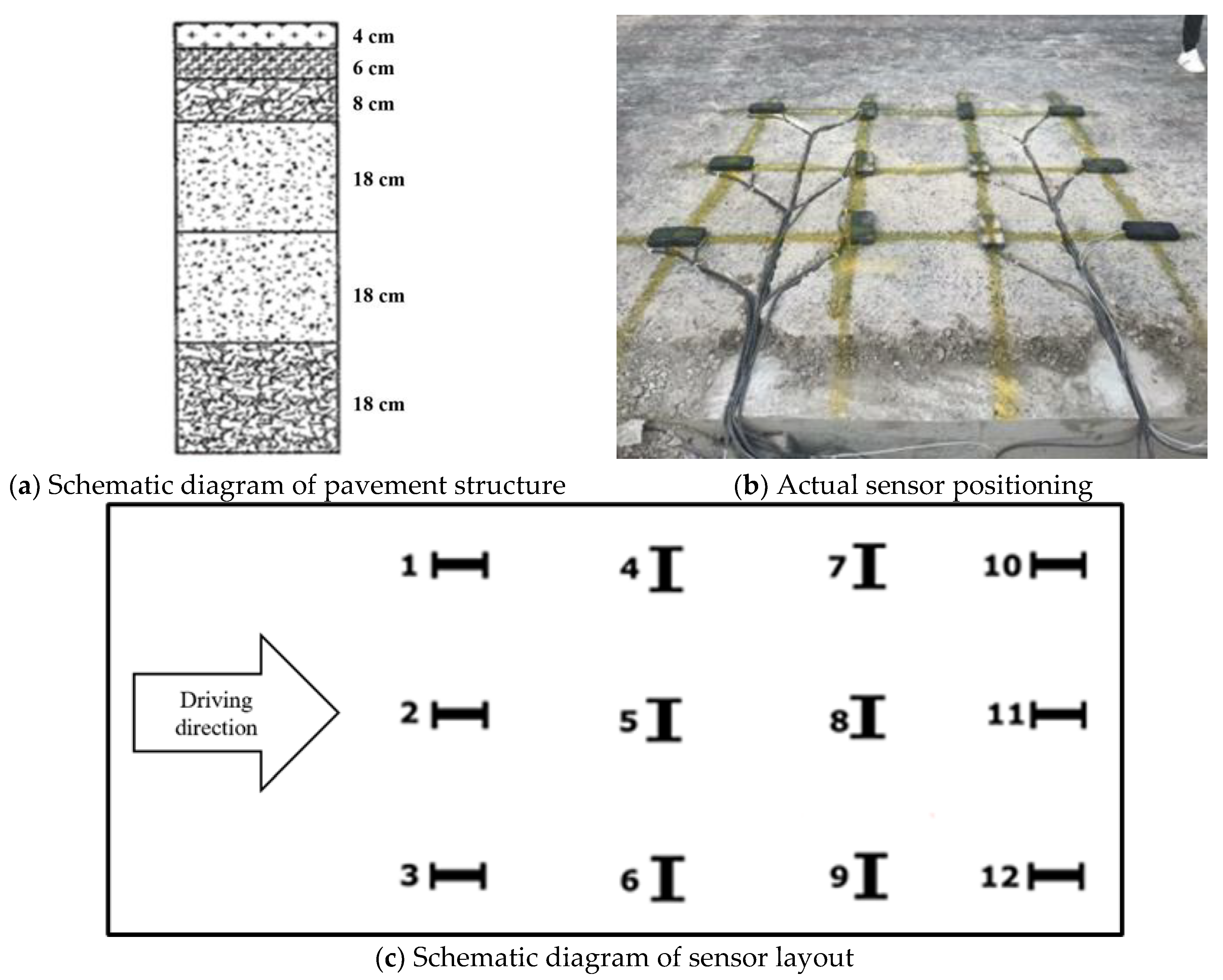
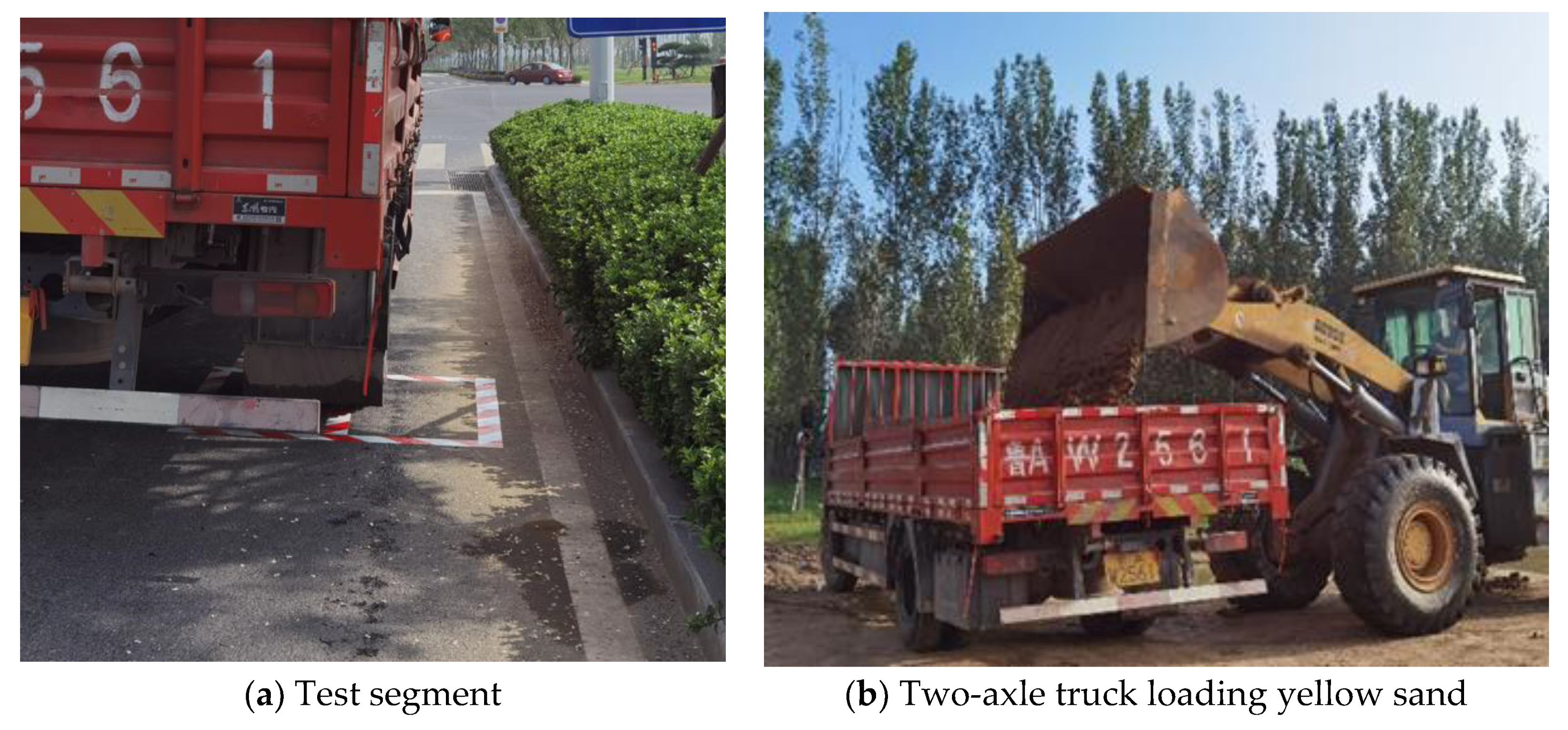
2.1. Engineering Background and Data Sources
2.2. Abnormal Data Diagnosis of Pavement Dynamic Response Signal Based on DBSCAN Algorithm
2.2.1. Introduction to DBSCAN Algorithm
2.2.2. Determination of Eps and MinPts
2.2.3. Implementation and Simulation of DBSCAN Improved Algorithm
3. Results and Discussion
3.1. Automatic Peak Finding of Pavement Dynamic Response Signals Based on the Findpeaks Function
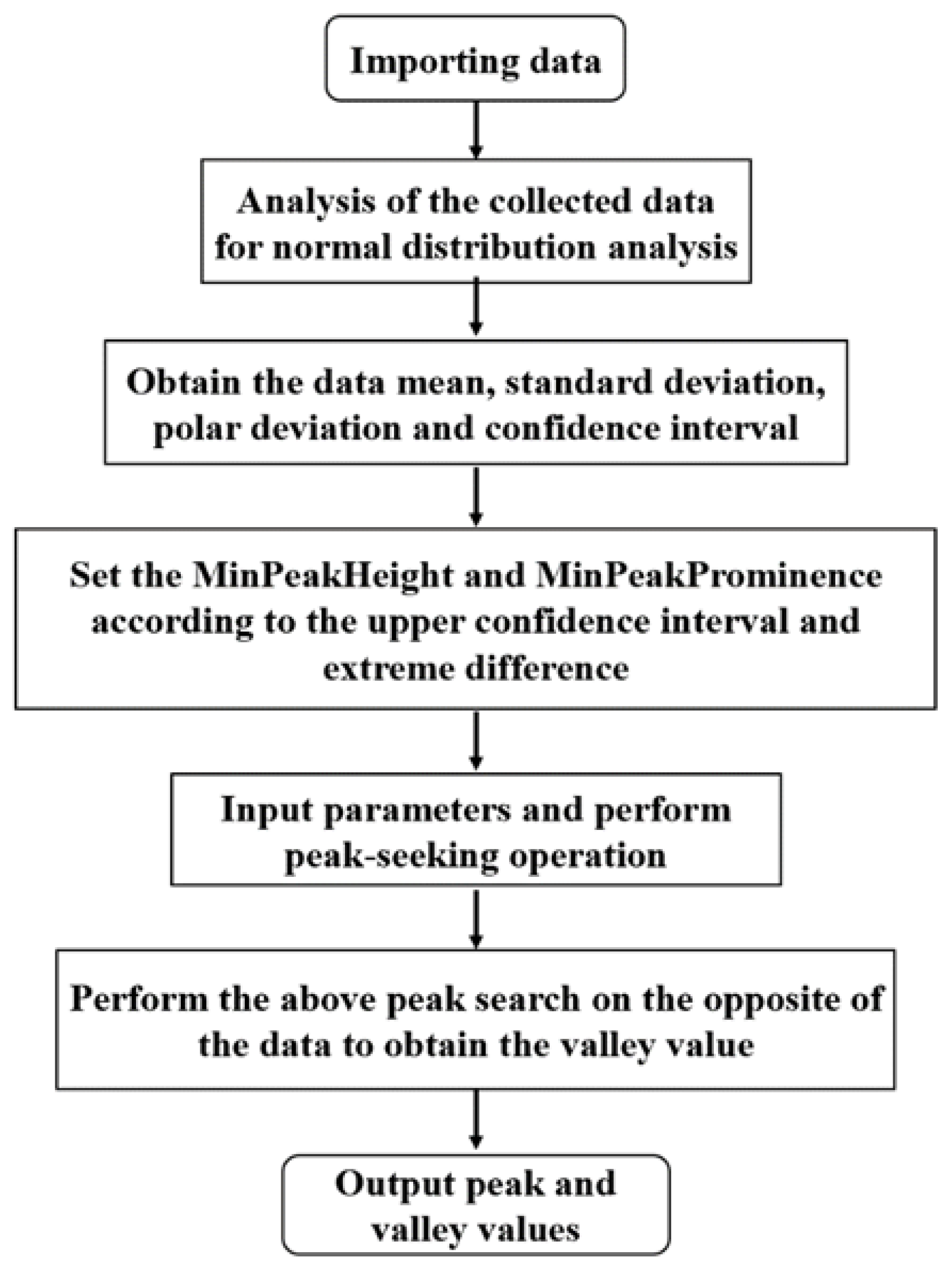
3.2. Findpeaks Function Peak Search Method Improvement
3.3. Analysis of Data Peak-Seeking Results
4. Conclusions
- (1)
- To address the sensitivity of the DBSCAN clustering algorithm to the Eps parameter, this parameter is determined through a K-Dist descending sorting process on the collected data. This could effectively diagnose large, abrupt abnormal values in the data.
- (2)
- The improved DBSCAN algorithm can detect most outliers, especially those close to the main data curve. This demonstrates the high diagnostic accuracy of DBSCAN density clustering, using the K-Dist method for Eps parameter calibration in identifying outlier data from pavement sensors.
- (3)
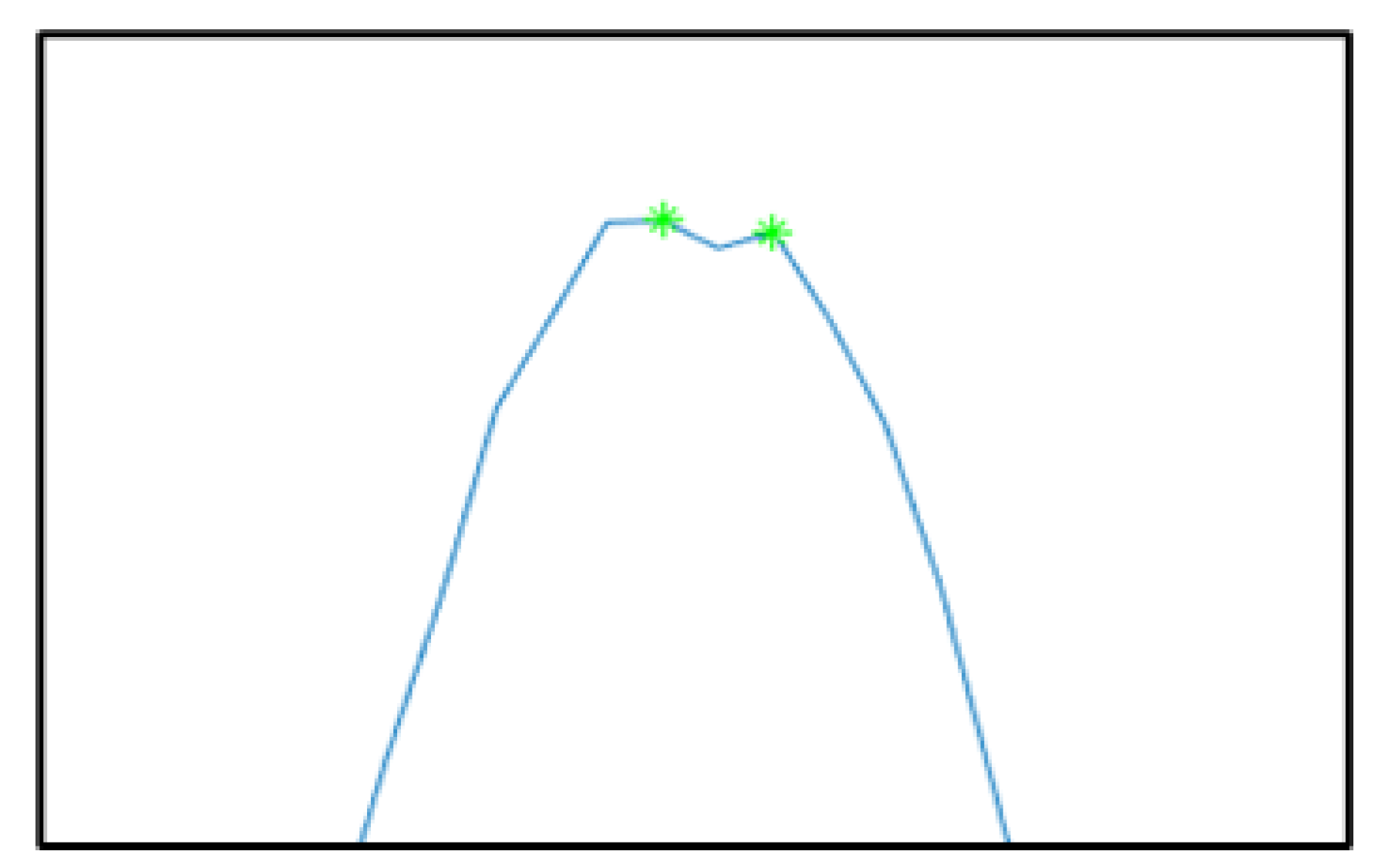
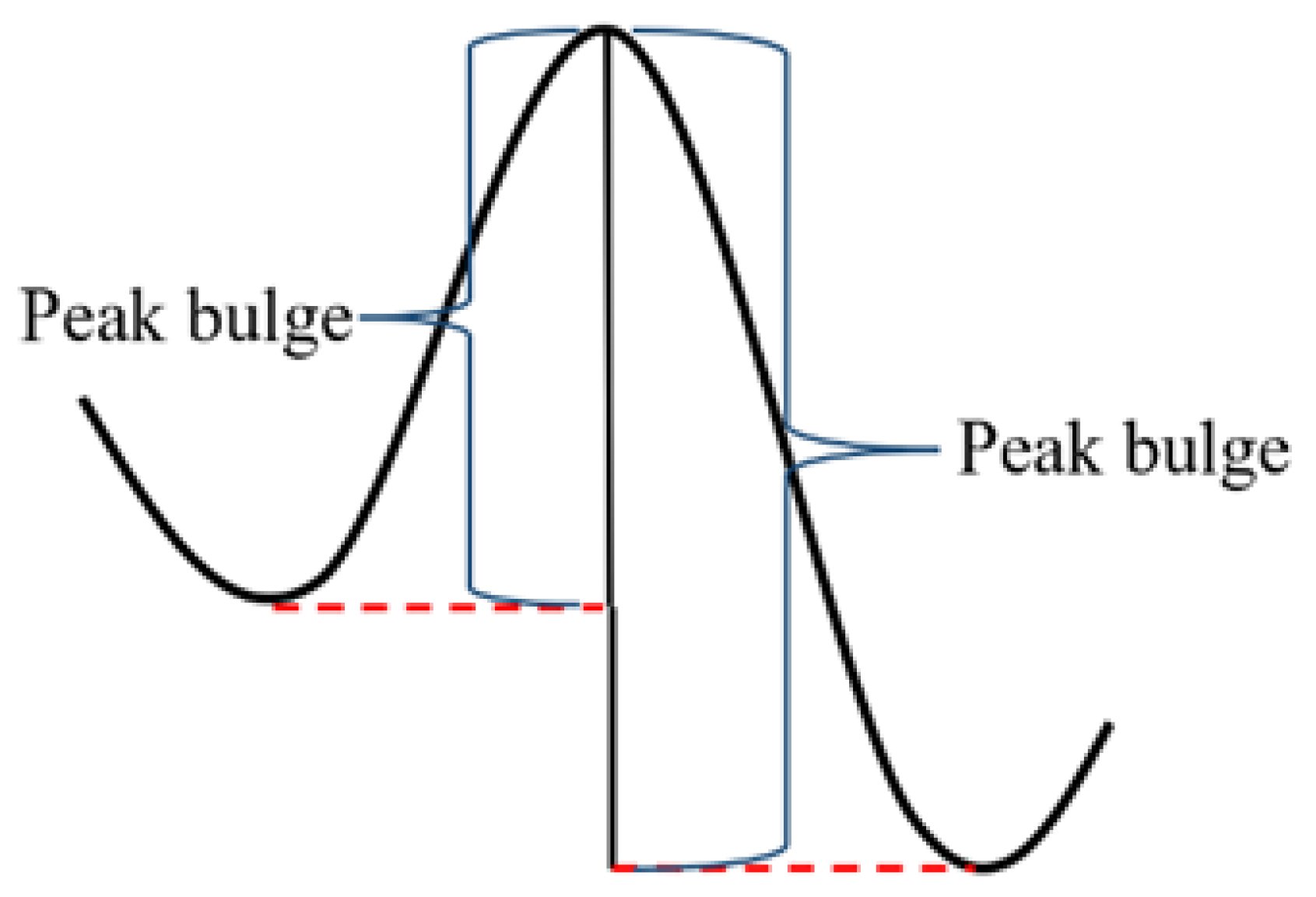
- The improved findpeaks function could accurately identify the time points and strain peaks, avoiding errors from data fluctuations in the baseline and peak formation process.
- (4)
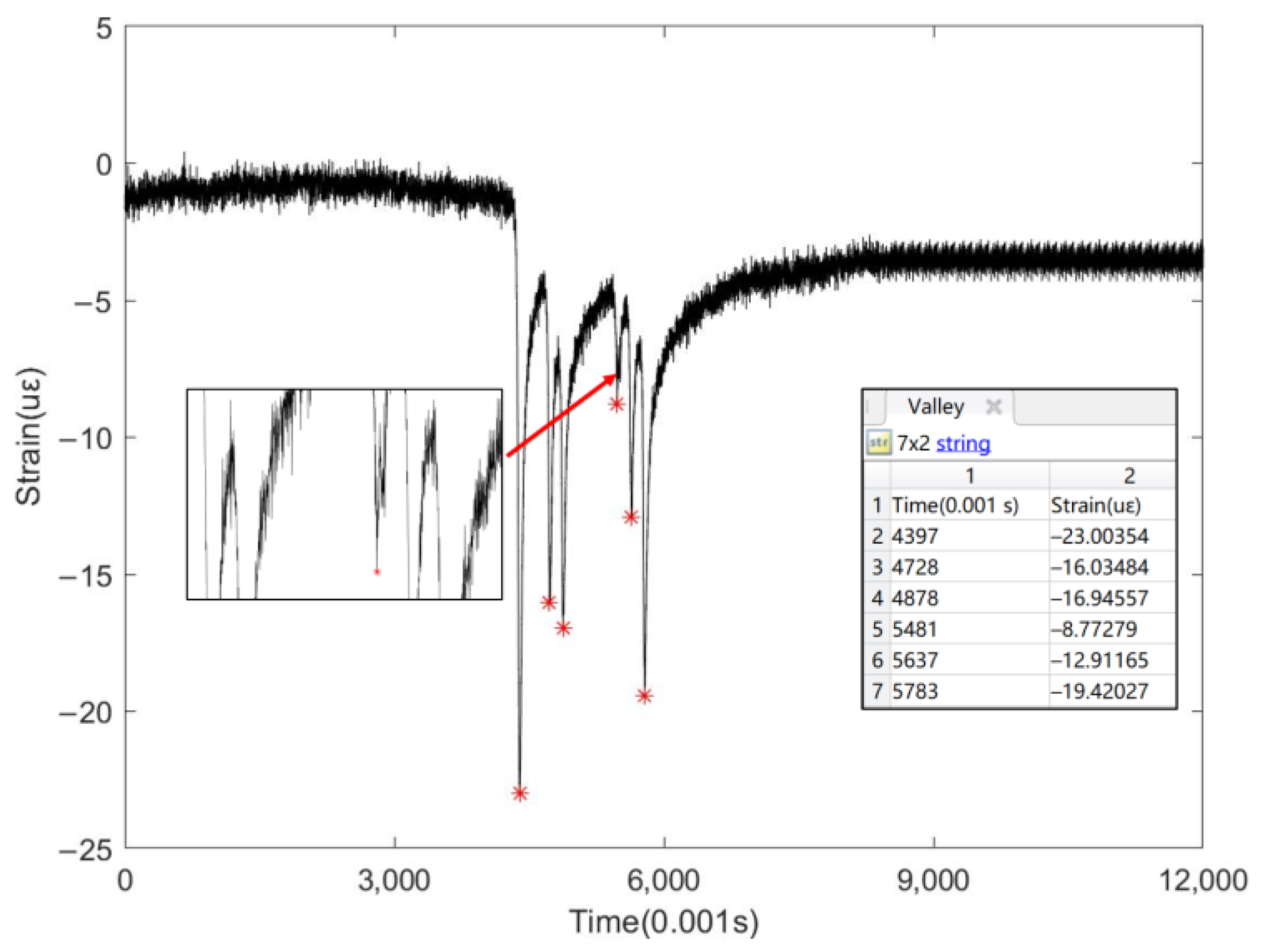
- Data from the sensors could also capture a random heavy load truck and exhibit both baseline and peak formation fluctuations. Although these data are characterized by numerous peaks, the peak-finding algorithm can accurately identify the strain peaks.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mehdi, M.A.; Cherradi, T.; Bouyahyaoui, A.; El Karkouri, S.; Qachar, A. Evolution of a flexible pavement deterioration, analyzing the road inspections results. Mater. Today Proc. 2022, 58, 1222–1228. [Google Scholar] [CrossRef]
- Cereceda, D.; Medel-Vera, C.; Ortiz, M.; Tramon, J. Roughness and condition prediction models for airfield pavements using digital image processing. Autom. Constr. 2022, 139, 104325.1–104325.12. [Google Scholar] [CrossRef]
- Cheng, L.; Zhang, L.; Liu, X.; Yuan, F.; Ma, Y.; Sun, Y. Evaluation of the fatigue properties for the long-term service asphalt pavement using the semi-circular bending tests and stereo digital image correlation technique. Constr. Build. Mater. 2022, 317, 126119. [Google Scholar] [CrossRef]
- Fu, X.; Xu, X.; Liu, H.; Wang, W.; Zhu, D. Bearing capacity of transmission poles under combined wind and rain excitations based on the deep learning method. Buildings 2023, 13, 1717. [Google Scholar] [CrossRef]
- Ma, X.; Dong, Z.; Quan, W.; Dong, Y.; Tan, Y. Real-time assessment of asphalt pavement moduli and traffic loads using monitoring data from Built-in Sensors: Optimal sensor placement and identification algorithm. Mech. Syst. Signal Process. 2023, 187, 109930. [Google Scholar] [CrossRef]
- Cheng, H.; Liu, L.; Sun, L.; Li, Y.; Hu, Y. Comparative analysis of strain-pulse-based loading frequencies for three types of asphalt pavements via field tests with moving truck axle loading. Constr. Build. Mater. 2020, 247, 118519. [Google Scholar] [CrossRef]
- Zhang, Q.; Fu, X.; Sun, Z.; Ren, L. A Smart Multi-Rate Data Fusion Method for Displacement Reconstruction of Beam Structures. Sensors 2022, 22, 3167. [Google Scholar] [CrossRef]
- Johnson, R.A.; Wichern, D.W. Applied multivariate statistical analysis. Technimetrics 2005, 47, 517. [Google Scholar]
- Dimoudis, D.; Vafeiadis, T.; Nizamis, A.; Ioannidis, D.; Tzovaras, D. Utilizing an adaptive window rolling median methodology for time series anomaly detection. Procedia Comput. Sci. 2023, 217, 584–593. [Google Scholar] [CrossRef]
- Pei, L.; Sun, Z.; Yu, T.; Li, W.; Hao, X.; Hu, Y.; Yang, C. Pavement aggregate shape classification based on extreme gradient boosting. Constr. Build. Mater. 2020, 256, 11953. [Google Scholar] [CrossRef]
- Luo, Z.L.; Qian, H.M.; Zhou, J. Abnormal Activity Detection Based on the Poisson Equation. Sci. Technol. Eng. 2014, 14, 50–55. [Google Scholar]
- Saeed, N.; Al-Naffouri, T.Y.; Alouini, M.-S. Outlier Detection and Optimal Anchor Placement for 3-D Underwater Optical Wireless Sensor Network Localization. IEEE Trans. Commun. 2019, 67, 611–622. [Google Scholar] [CrossRef]
- Liu, A.; Sun, F.; Li, W.; Wen, X.; Wang, T.; Cheng, X. Analysis and Application of Abnormal Electricity Based on Mean Shift Clustering and XGBoost Verification. In Proceedings of the 4th International Workshop on Advances in Energy Science and Environment Engineering, Hangzhou, China, 10–12 April 2020. [Google Scholar]
- Krishna Narayanan, S.; Dhanasekaran, S.; Vasudevan, V. An effective parameter tuned deep belief network for detecting anomalous behavior in sensor-based cyber-physical systems. Theor. Comput. Sci. 2022, 931, 142–151. [Google Scholar] [CrossRef]
- Kong, X.; Gao, H.; Alfarraj, O.; Ni, Q.; Zheng, C.; Shen, G. HUAD: Hierarchical Urban Anomaly Detection Based on Spatio-Temporal Data. IEEE Access 2020, 4, 26573–26582. [Google Scholar] [CrossRef]
- Yan, Q.; Lu, Z.Y.; Wang, P.; Ding, X.D.; Cheng, F.L.; Zhang, Y.F. A New Method for Anomaly Detection and Diagnosis of Ocean Observation System based on Deep Learning. In Proceedings of the 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; IEEE: Shanghai, China, 2021; pp. 7088–7093. [Google Scholar]
- Xu, J.; Liu, M.; Ma, Q.; Han, Q.H. Temperature-based anomaly diagnosis of truss structure using Markov chain-Monte Carlo method. J. Civ. Struct. Health Monit. 2022, 12, 705–724. [Google Scholar] [CrossRef]
- Jing, W.; Wang, P.; Zhang, N.C. Study on Temperature Sensor Data Anomaly Diagnosis Method Based on Deep Neural Network. Sci. Program. 2022, 2022, 8. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, G.; Wang, R.; Rong, H.; Yang, B. Acoustic vector sensor multi-source detection based on multimodal fusion. Sensors 2023, 23, 1301. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Ji, M.; Wang, J.; Wen, W.; Li, T.; Sun, Y. An improved DBSCAN method for LiDAR data segmentation with automatic Eps estimation. Sensors 2019, 19, 172. [Google Scholar] [CrossRef]
- Zhang, D.; Du, K.; Han, W.N.; Li, X.; Wang, Y. Peak point location of fluorescence immunochromatography image based on the cascaded convolutional neural network. Chin. J. Sci. Instrum. 2021, 42, 217–227. [Google Scholar]
- Li, S.Y.; Xu, Z.; Xiong, W.J.; Jiang, S.Q.; Wu, J. An Automatic Peak Identification Method for Photoplethysmography Signals. Spectrosc. Spectr. Anal. 2017, 37, 3145–3149. [Google Scholar]
- Lin, X.M.; Liang, T.Z.; Cao, L. Extraction of Chromatographic Characteristics Based on Wavelet Ridge and Morphology. In Proceedings of the 4th IEEE International Conference on Big Data Analytics (ICBDA), Suzhou, China, 15–18 March 2019; IEEE: Suzhou, China, 2019; pp. 297–302. [Google Scholar]
- Jang, S.W.; Lee, S.H. Detection of Epileptic Seizures Using Wavelet Transform, Peak Extraction and PSR from EEG Signals. Symmetry 2020, 12, 1239. [Google Scholar] [CrossRef]
- Rasid, M.H.M.; Simon, N.L.; Adam, A. Using Neural Network with Random Weights and Mutual Information for Systolic Peaks Classification of PPG Signals. In Proceedings of the ICBET 2020: Proceedings of the 2020 10th International Conference on Biomedical Engineering and Technology, Tokyo, Japan, 15–18 September 2020; pp. 276–283.
- Zhou, Y.J.; Ma, J.; Li, F.; Chen, B.H.; Xian, T.; Wei, X.G. An Improved Algorithm for Peak Detection Based on Weighted Continuous Wavelet Transform. IEEE Access 2022, 10, 118779–118788. [Google Scholar] [CrossRef]
- Hanafi, N.; Saadatfar, H. A fast DBSCAN algorithm for big data based on efficient density calculation. Expert Syst. Appl. 2022, 203, 117501. [Google Scholar] [CrossRef]
- Smiti, A. A critical overview of outlier detection methods. Comput. Sci. Rev. 2020, 38, 100306. [Google Scholar] [CrossRef]
- Shi, H.Y.; Ma, X.J. Two-stage Outlier Detection Method Based on DBSCAN Clustering and LAOF of Hybrid Data. J. Chin. Comput. Syst. 2018, 39, 74–77. [Google Scholar]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Yao, R.; Cui, C.; Zhao, J. A Data-Mining Interpretation Method of Pavement Dynamic Response Signal by Combining DBSCAN and Findpeaks Function. Sensors 2024, 24, 939. https://doi.org/10.3390/s24030939
Liu H, Yao R, Cui C, Zhao J. A Data-Mining Interpretation Method of Pavement Dynamic Response Signal by Combining DBSCAN and Findpeaks Function. Sensors. 2024; 24(3):939. https://doi.org/10.3390/s24030939
Chicago/Turabian StyleLiu, Hailong, Ruqing Yao, Chunyi Cui, and Jiuye Zhao. 2024. "A Data-Mining Interpretation Method of Pavement Dynamic Response Signal by Combining DBSCAN and Findpeaks Function" Sensors 24, no. 3: 939. https://doi.org/10.3390/s24030939
APA StyleLiu, H., Yao, R., Cui, C., & Zhao, J. (2024). A Data-Mining Interpretation Method of Pavement Dynamic Response Signal by Combining DBSCAN and Findpeaks Function. Sensors, 24(3), 939. https://doi.org/10.3390/s24030939