
Spatial Localization of a Transformer Robot Based on Ultrasonic Signal Wavelet Decomposition and PHAT-β-γ Generalized Cross Correlation


Abstract
:1. Introduction
2. Micro-Robot Localization Method Based on the Optimization of Ultrasonic Time Delay Estimation
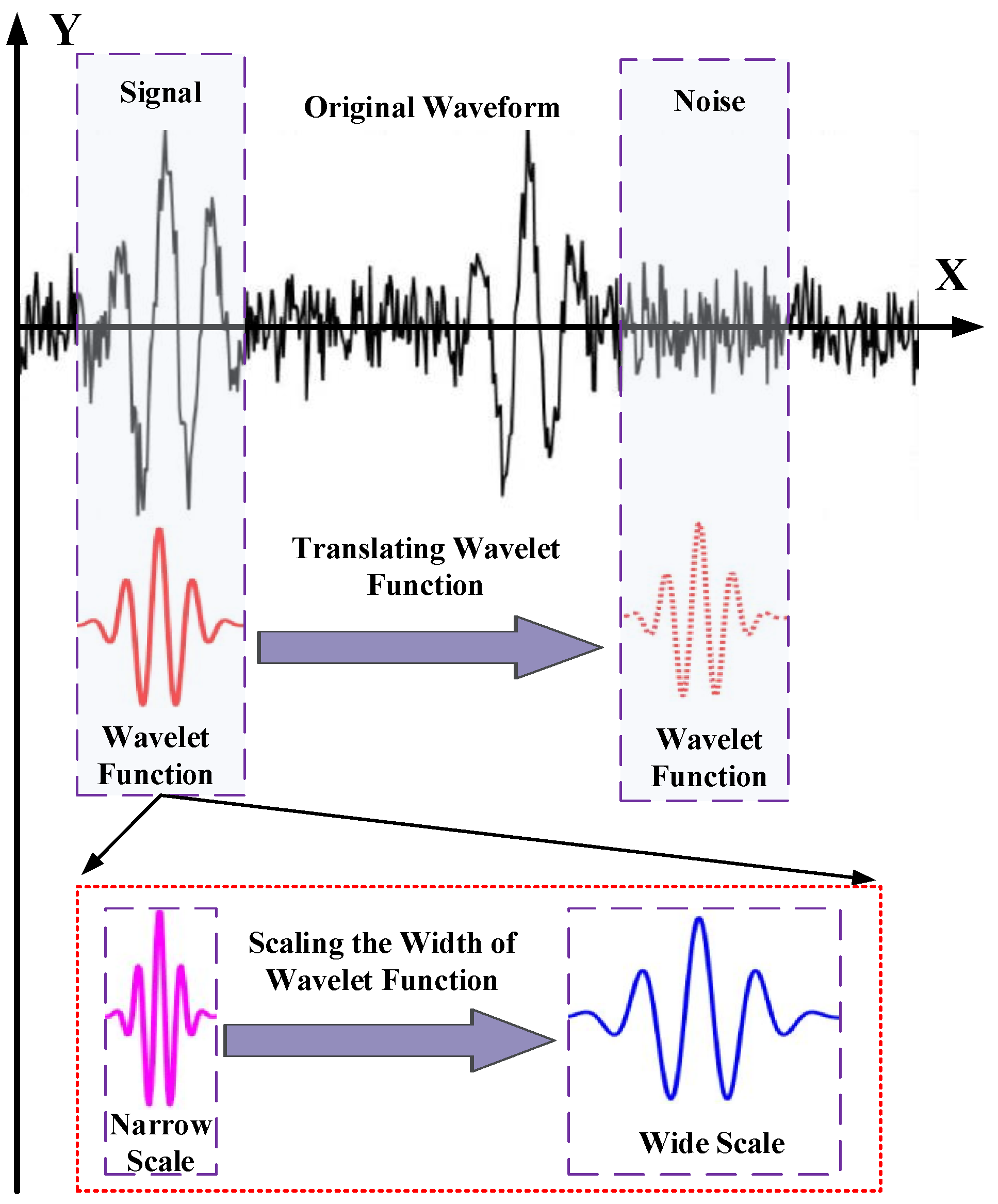
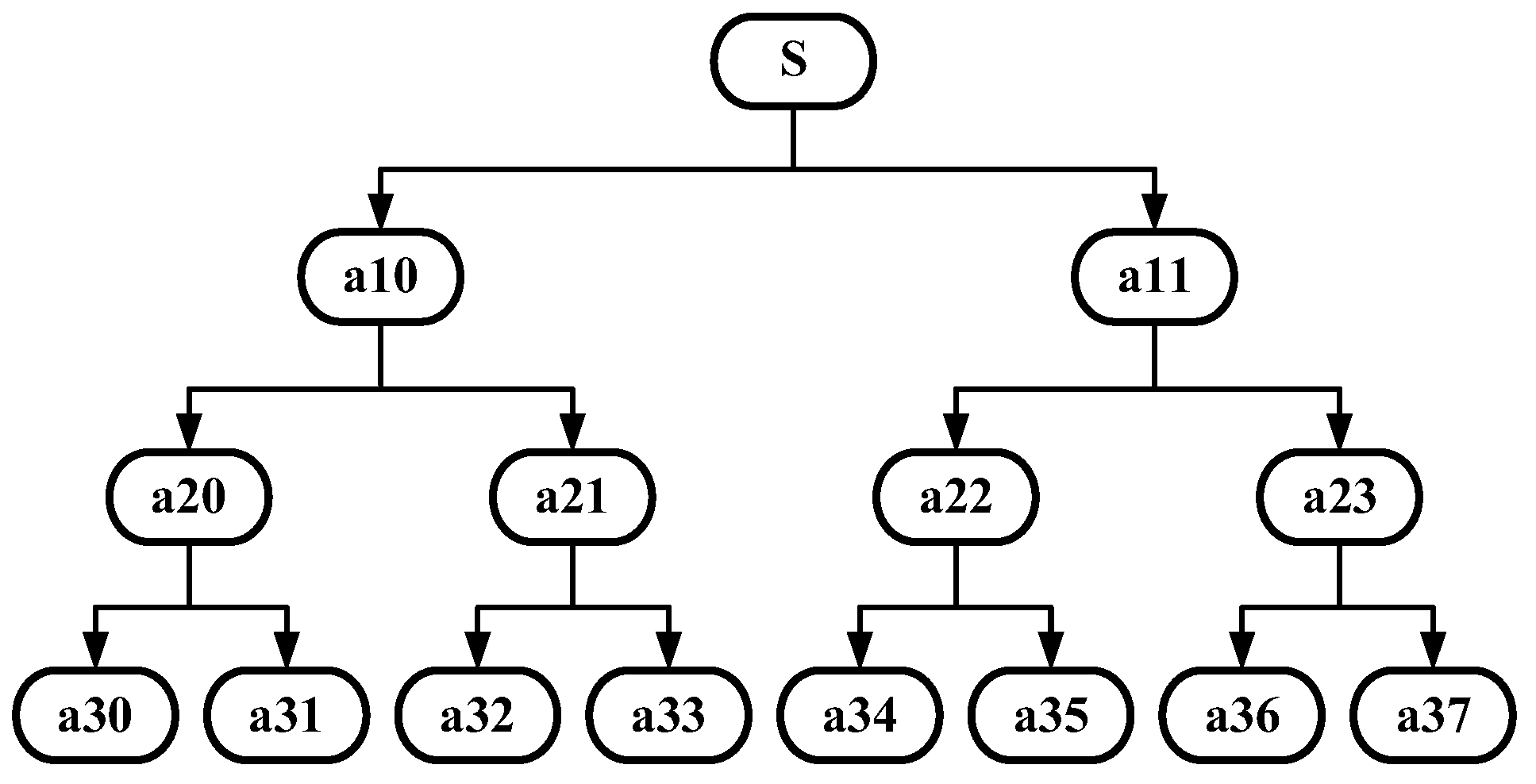
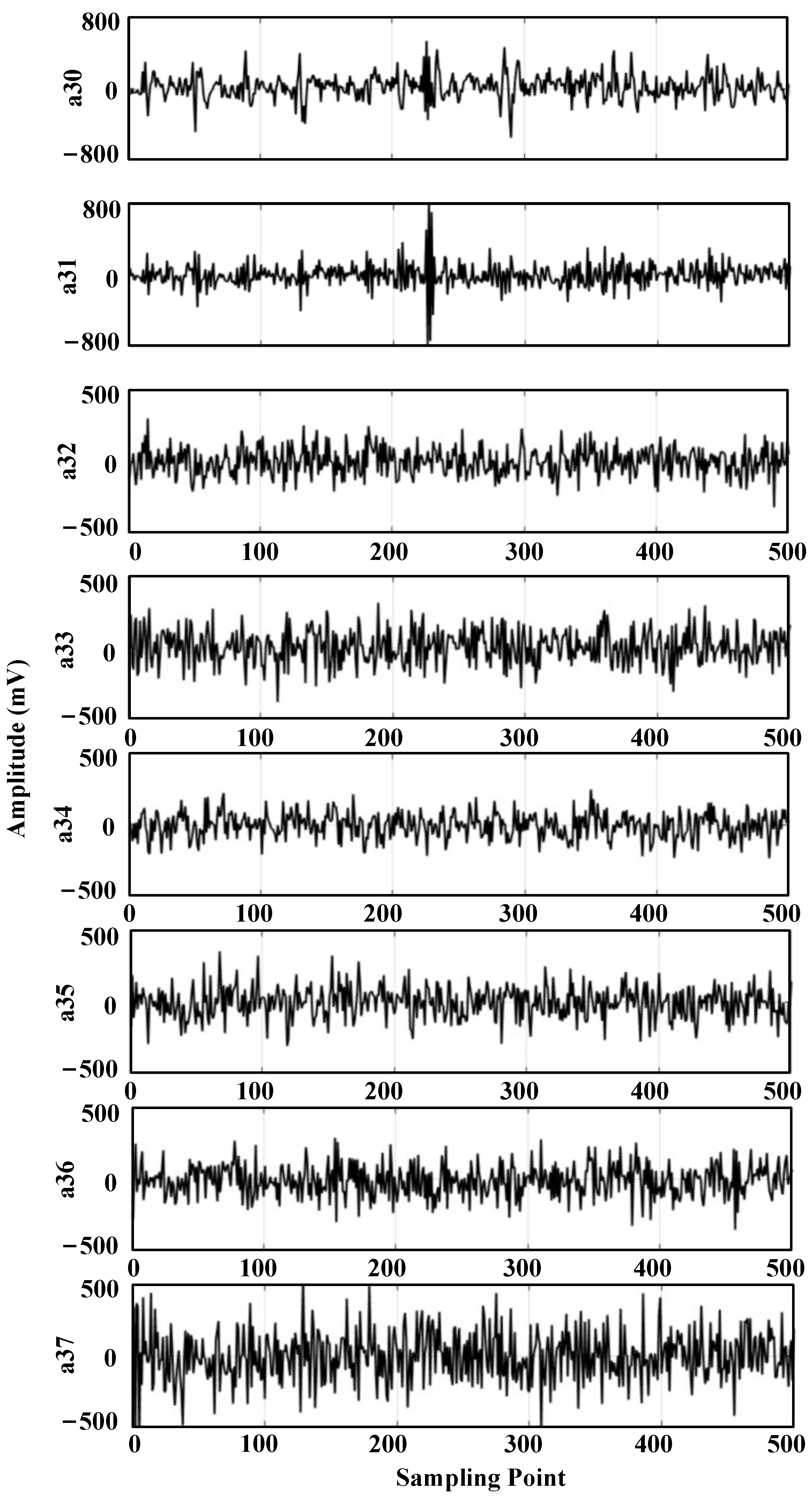
2.1. Ultrasonic Signal Decomposition and Reconstruction Based on Wavelet Transform
2.2. Optimization of the Ultrasonic Signal Time Delay Estimation Algorithm for the Micro-Robot
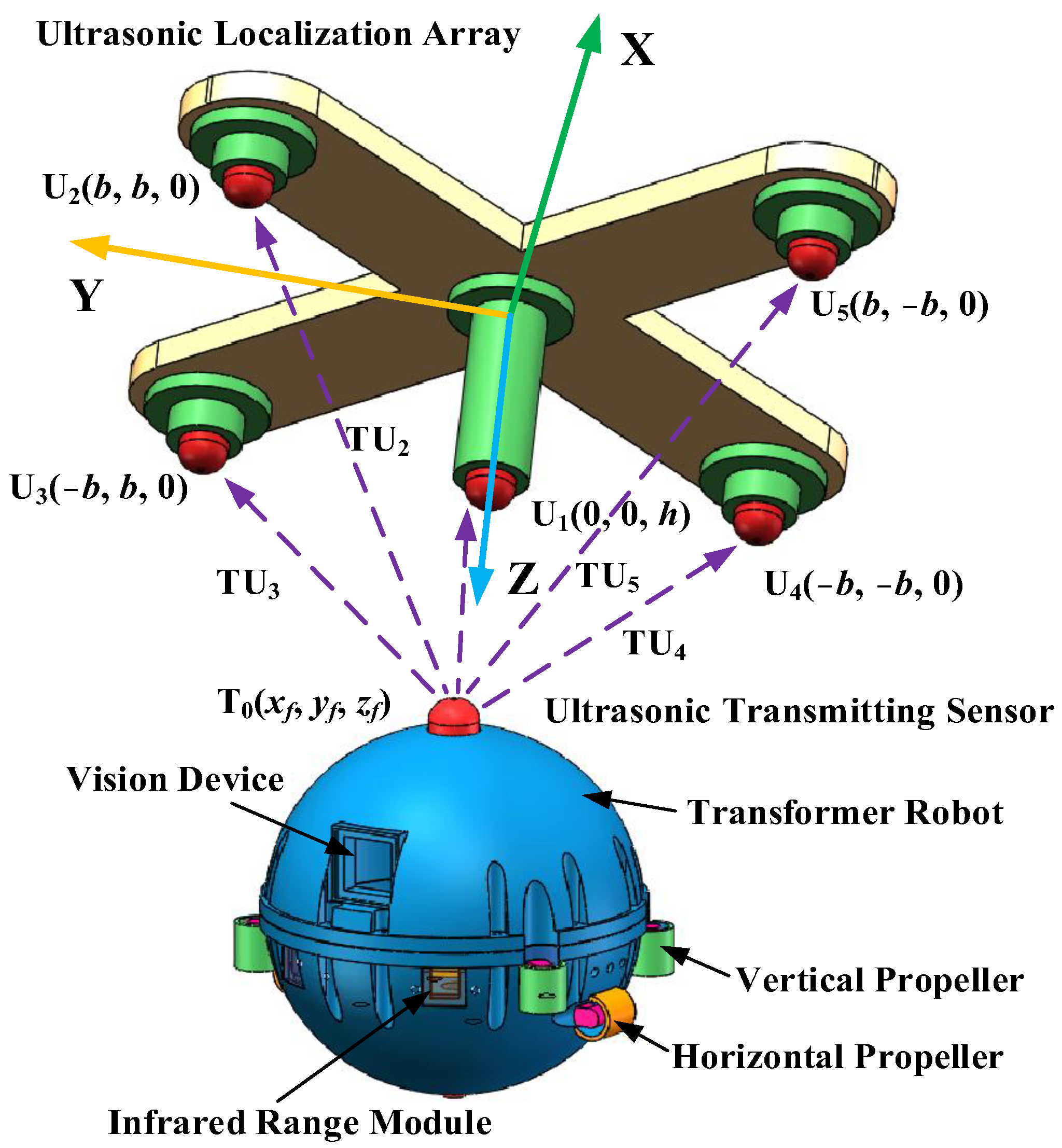
2.3. Localization Method of a Micro-Robot in a Power Tranformer
3. Simulation Validation of the 3D Spatial Localization Method for Transformer Micro-Robots
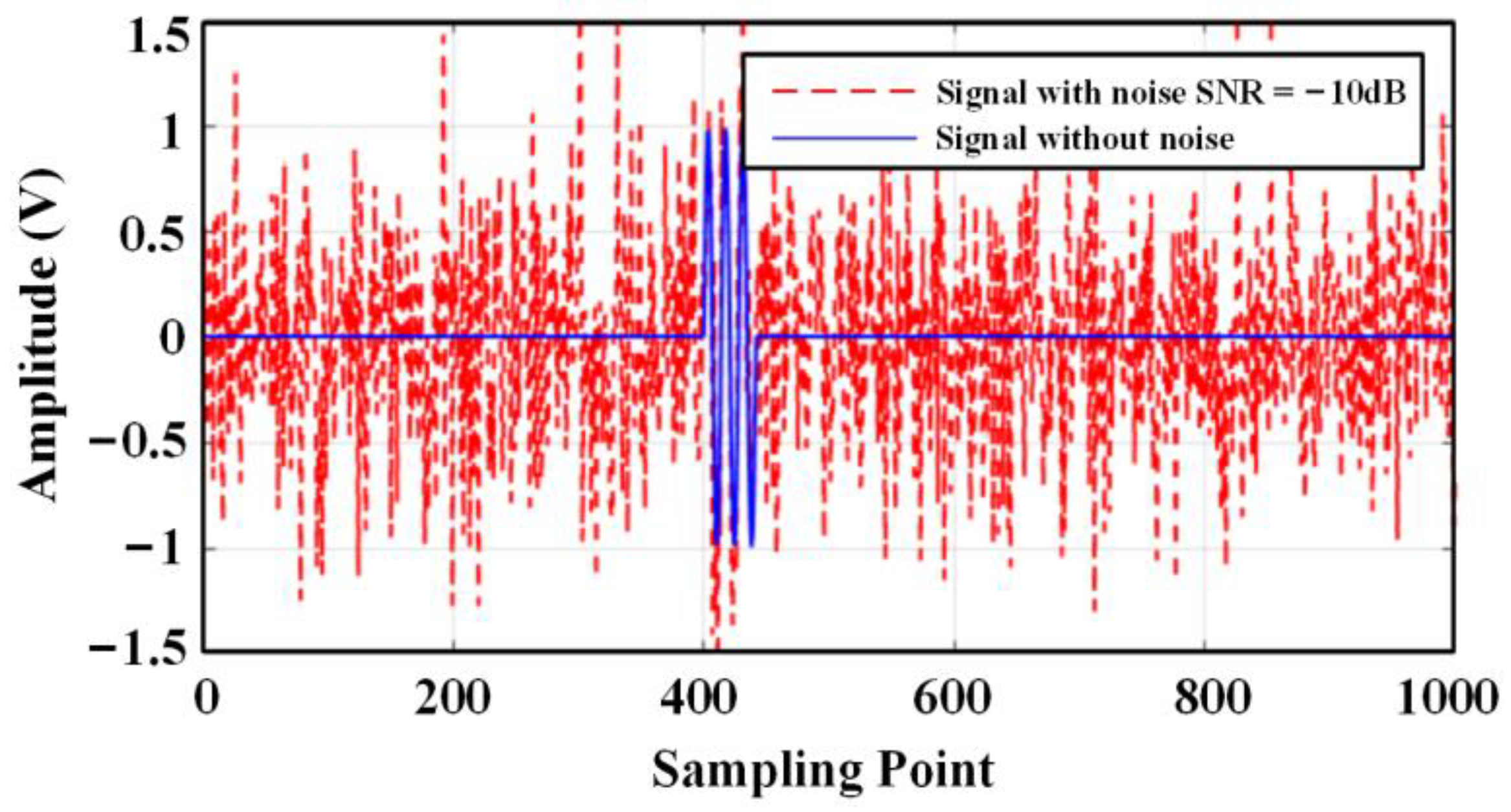
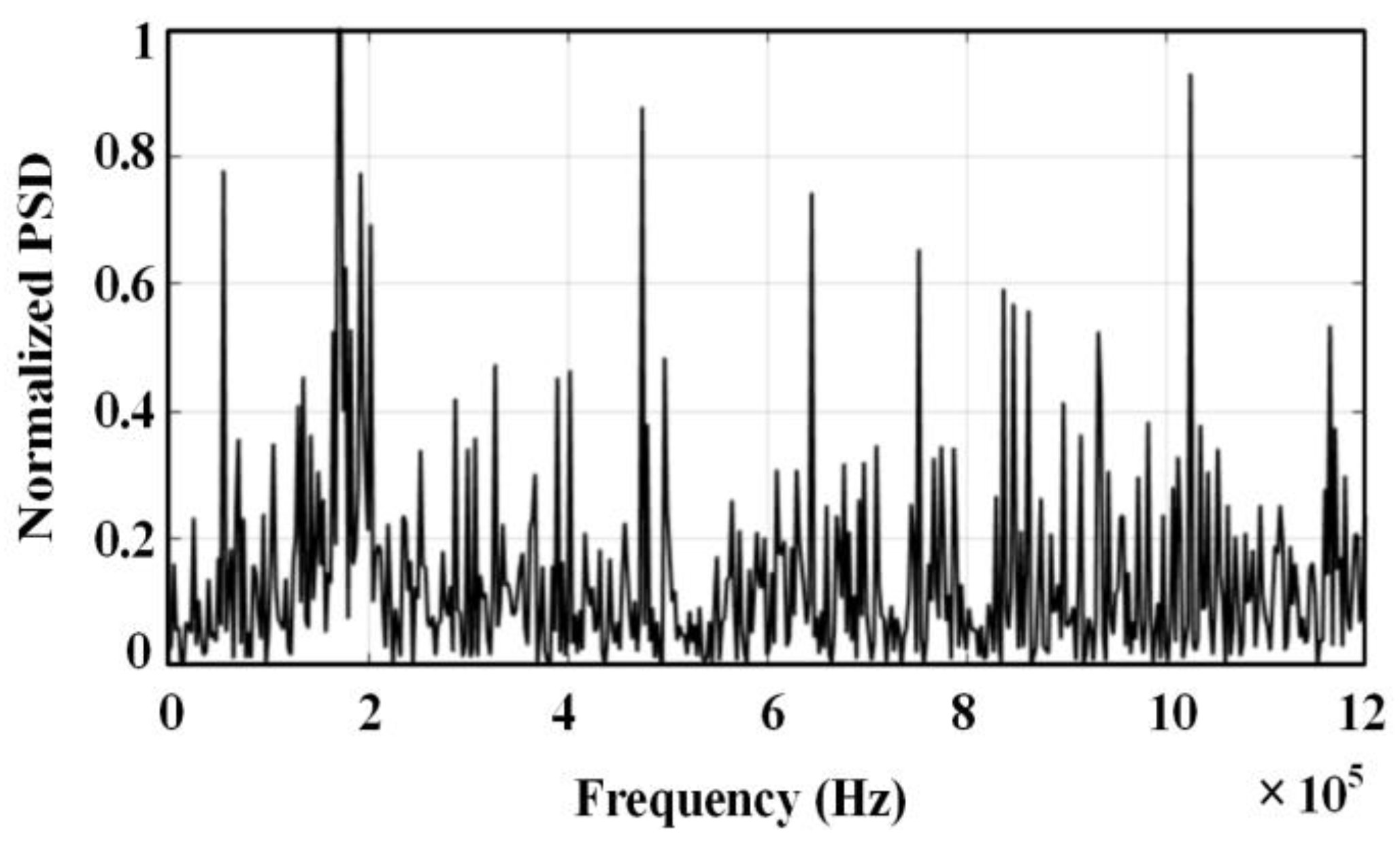
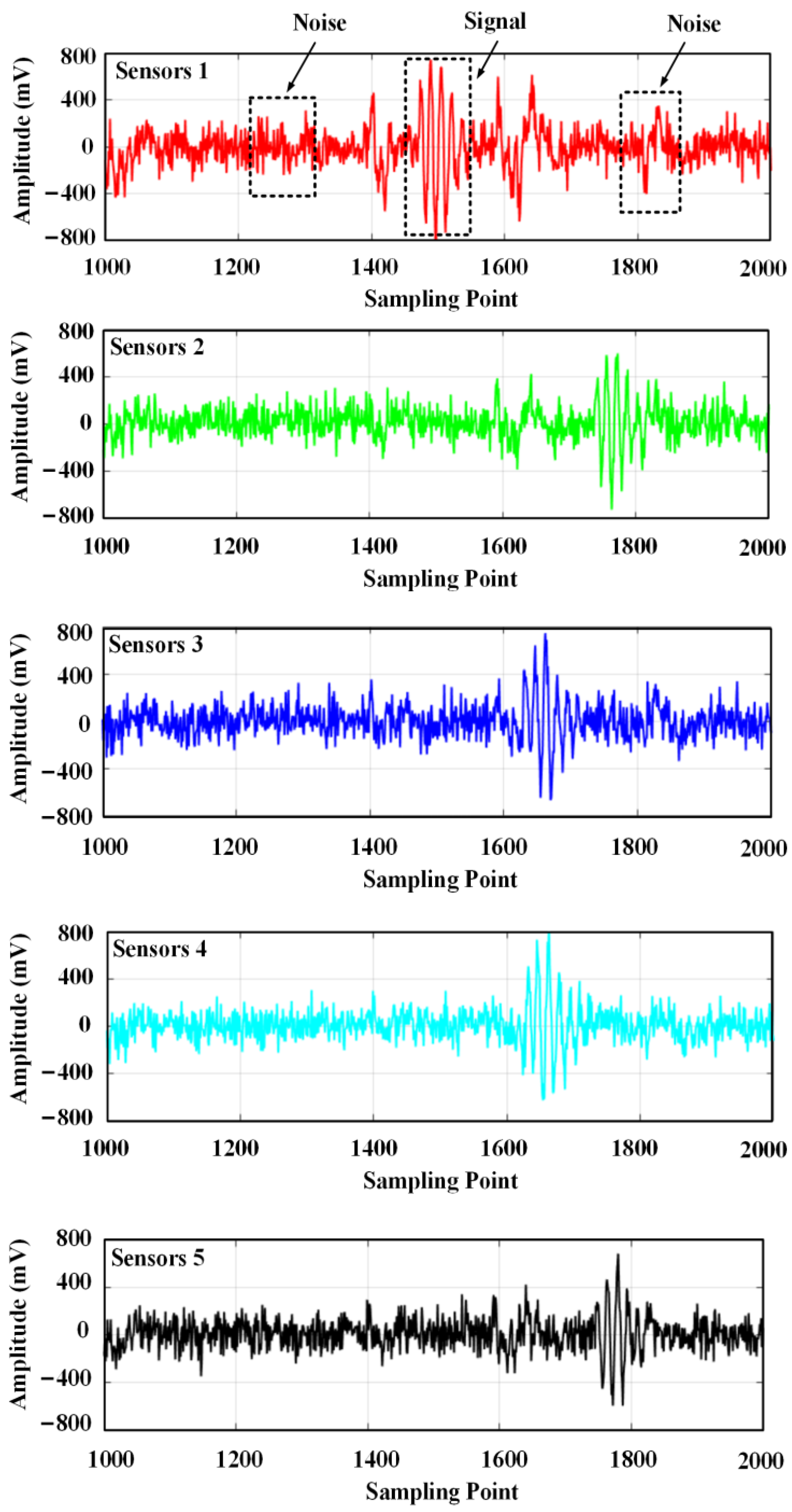
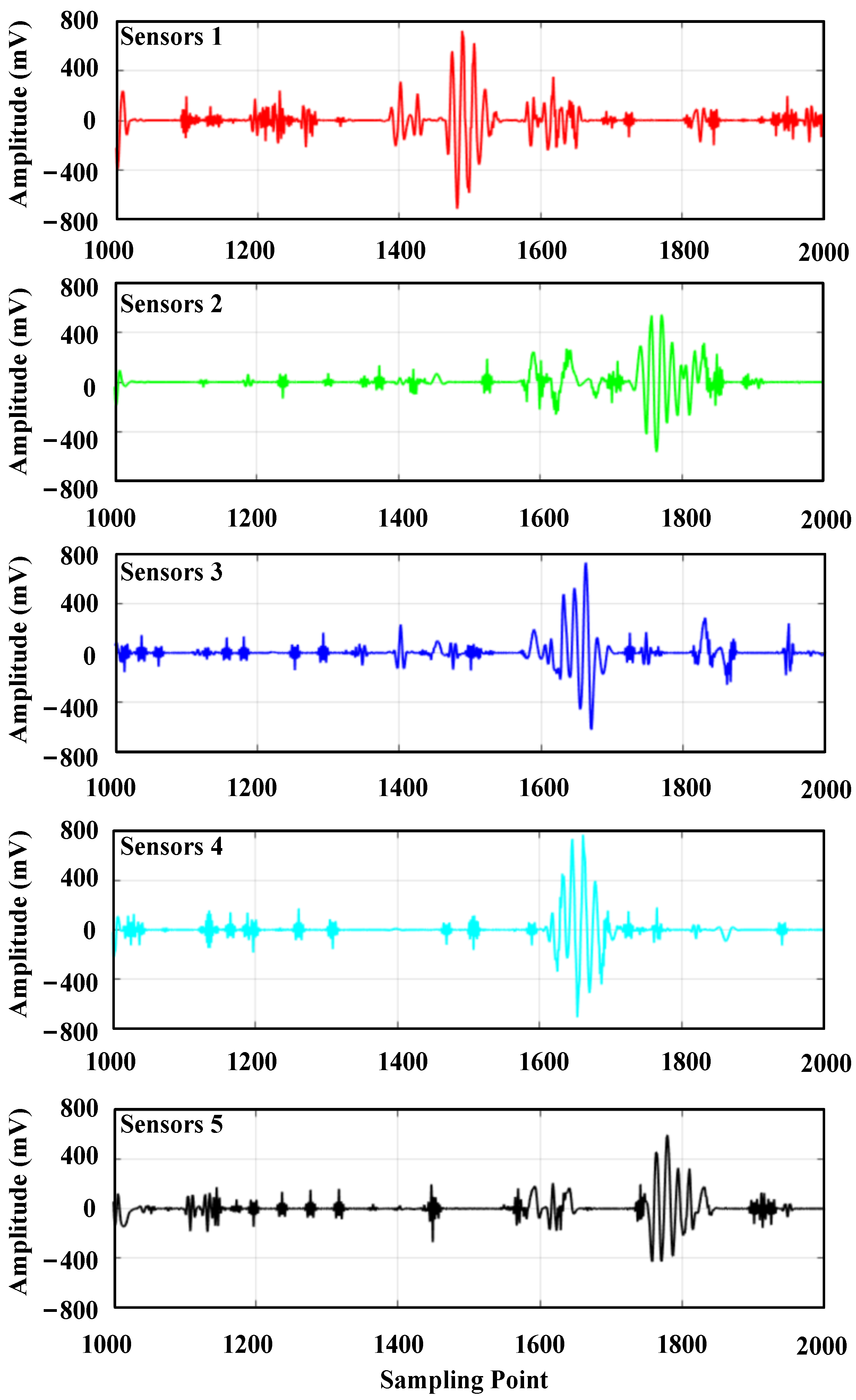
3.1. Ultrasonic Signal Characteristics
3.2. Time Delay Estimation
4. Experimental Testing and Verification of the 3D Spatial Localization Effect of the Patrol Micro-Robot
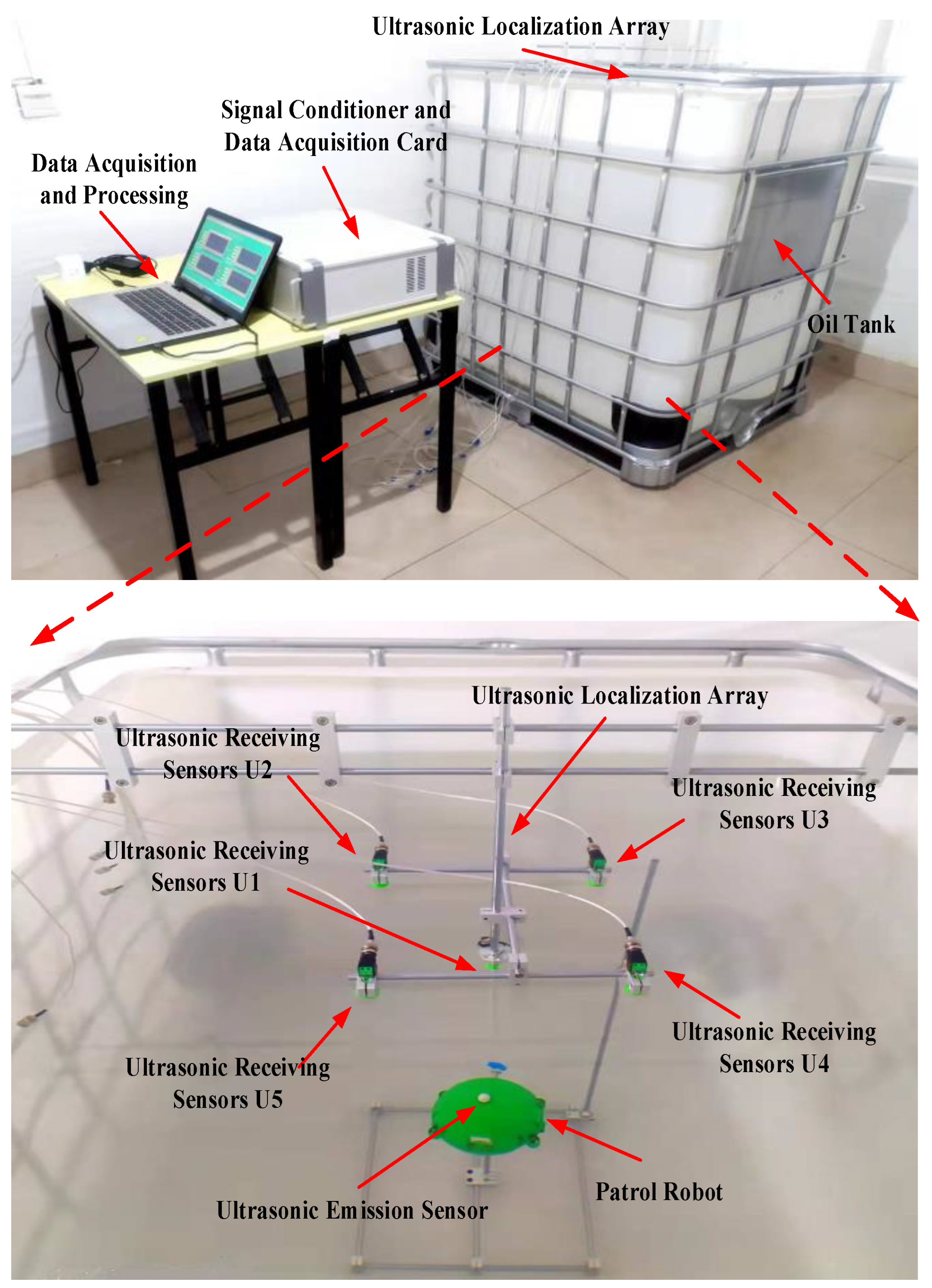
4.1. Test Platform for Patrol Micro-Robot 3D Spatial Localization
4.2. Experiment and Data Acquisition Process
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, Y.; Liu, W.; Gao, W.; Zhang, X.; Wang, Y. Comparison of pd detection methods for power transformers—Their sensitivity and characteristics in time and frequency domain. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 2925–2932. [Google Scholar] [CrossRef]
- Wu, Z.; Zhou, L.; Lin, T.; Zhou, X.; Wang, D.; Gao, S.; Jiang, F. A New Testing Method for the Diagnosis of Winding Faults in Transformer. IEEE Trans. Instrum. Meas. 2020, 69, 9203–9214. [Google Scholar] [CrossRef]
- Wang, Y.B.; Chang, D.G.; Fan, Y.H.; Zhang, G.J.; Zhan, J.Y.; Shao, X.J.; He, W.L. Acoustic localization of partial discharge sources in power transformers using a particle-swarm-optimization-route-searching algorithm. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 3647–3656. [Google Scholar] [CrossRef]
- Jiang, R.; Zhang, L.; Yang, J.; Zheng, C.; Duan, X.; Xue, J.; Li, W.; Chen, Q.; Guo, T. Fault Diagnosis and Treatment of a Newly Put into Operation 220kV Transformer. In Proceedings of the 2022 China International Conference on Electricity Distribution (CICED), Changsha, China, 7–8 September 2022; pp. 1001–1006. [Google Scholar]
- Cheng, J.; Wang, S.; Huang, K.; Bao, L.; La, Y.; Guo, T. Analysis of discharge phenomenon in an UHV converter transformer during factory test. In Proceedings of the 16th IET International Conference on AC and DC Power Transmission (ACDC 2020), Online, 2–3 July 2020; pp. 2231–2234. [Google Scholar]
- TXplore™ Transformer Inspection Robot|Hitachi Energy. Available online: https://www.hitachienergy.com/products-and-solutions/transformers/transformer-service/assess-and-secure/txplore-transformer-inspection-robot (accessed on 15 January 2024).
- ABB’s TXplore Robot Redefines Transformer Inspection. Available online: https://new.abb.com/news/detail/7870/abbs-txplore-robot-redefines-transformer-inspection (accessed on 15 January 2024).
- Yue, C.; Guo, S.; Li, M.; Li, Y.; Hirata, H.; Ishihara, H. Mechatronic System and Experiments of a Spherical Underwater Robot: SUR-II. J. Intell. Robot. Syst. 2015, 80, 325–340. [Google Scholar] [CrossRef]
- Feng, Y.; Liu, Y.; Gao, H.; Ju, Z. Hovering Control of Submersible Transformer Inspection Robot Based on ASMBC Method. IEEE Access 2020, 8, 76287–76299. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, Y.; Sun, X.; He, Z.; Li, Z. Research on High Reliability and Redundancy Design Method of Risk-driven Transformer Internal Inspection Robot. In Proceedings of the 2023 2nd International Conference on Robotics, Artificial Intelligence and Intelligent Control (RAIIC), Mianyang, China, 11–13 August 2023; pp. 89–95. [Google Scholar]
- Ji, H.; Cui, X.; Ren, W.; Liu, L.; Wang, W. Visual inspection for transformer insulation defects by a patrol robot fish based on deep learning. IET Sci. Meas. Technol. 2021, 15, 606–618. [Google Scholar] [CrossRef]
- Ji, H.; Cui, X.; Gao, Y.; Ge, X. 3-D Ultrasonic Localization of Transformer Patrol Robot Based on EMD and PHAT-β Algorithms. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Huang, Z.; Zhu, J.; Yang, L.; Xue, B.; Wu, J.; Zhao, Z. Accurate 3-D Position and Orientation Method for Indoor Mobile Robot Navigation Based on Photoelectric Scanning. IEEE Trans. Instrum. Meas. 2015, 64, 2518–2529. [Google Scholar] [CrossRef]
- Ko, M.H.; Ryuh, B.S.; Kim, K.C.; Suprem, A.; Mahalik, N.P. Autonomous Greenhouse Mobile Robot Driving Strategies from System Integration Perspective: Review and Application. IEEE/ASME Trans. Mechatron. 2015, 20, 1705–1716. [Google Scholar] [CrossRef]
- Chae, H.W.; Choi, J.H.; Song, J.B. Robust and Autonomous Stereo Visual-Inertial Navigation for Non-Holonomic Mobile Robots. IEEE Trans. Veh. Technol. 2020, 69, 9613–9623. [Google Scholar] [CrossRef]
- Hwang, C.L.; Chou, Y.J.; Lan, C.W. Comparisons Between Two Visual Navigation Strategies for Kicking to Virtual Target Point of Humanoid Robots. IEEE Trans. Instrum. Meas. 2013, 62, 3050–3063. [Google Scholar] [CrossRef]
- Aparicio, J.; Aguilera, T.; Álvarez, F.J. Robust Airborne Ultrasonic Positioning of Moving Targets in Weak Signal Coverage Areas. IEEE Sens. J. 2020, 20, 13119–13130. [Google Scholar] [CrossRef]
- Zhang, R.; Höflinger, F.; Reindl, L. TDOA-Based Localization Using Interacting Multiple Model Estimator and Ultrasonic Transmitter/Receiver. IEEE Trans. Instrum. Meas. 2013, 62, 2205–2214. [Google Scholar] [CrossRef]
- Cui, X.; Yan, Y.; Hu, Y.; Guo, M. Performance comparison of acoustic emission sensor arrays in different topologies for the localization of gas leakage on a flat-surface structure. Sens. Actuators A Phys. 2019, 300, 111659. [Google Scholar] [CrossRef]
- Costa-Júnior, J.F.S.; Cortela, G.A.; Maggi, L.E.; Rocha, T.F.D.; Pereira, W.C.A.; Costa-Felix, R.P.B.; Alvarenga, A.V. Measuring uncertainty of ultrasonic longitudinal phase velocity estimation using different time-delay estimation methods based on cross-correlation: Computational simulation and experiments. Measurement 2018, 122, 45–56. [Google Scholar] [CrossRef]
- Ganguly, B.; Chaudhuri, S.; Biswas, S.; Dey, D.; Munshi, S.; Chatterjee, B.; Dalai, S.; Chakravorti, S. Wavelet Kernel-Based Convolutional Neural Network for Localization of Partial Discharge Sources Within a Power Apparatus. IEEE Trans. Ind. Inform. 2021, 17, 1831–1841. [Google Scholar] [CrossRef]
- Tuntiwong, K.; Phasukkit, P.; Tungjitkusolmun, S. Deep Learning-Based Acoustic Emission Scheme for Nondestructive Localization of Cracks in Monolith Zirconia Dental crown under Load. In Proceedings of the 2023 8th International STEM Education Conference (iSTEM-Ed), Ayutthaya, Thailand, 20–22 September 2023; pp. 1–4. [Google Scholar]
- Knapp, C.; Carter, G. The generalized correlation method for estimation of time delay. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 320–327. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Threshold Function | SNR/dB | RMSE | NCC |
|---|---|---|---|
| Raw noisy signal | −10 | 0.456 | 0.298 |
| Hard threshold function | −1.484 | 0.171 | 0.584 |
| Soft threshold function | 3.845 | 0.093 | 0.830 |
| Semi-soft threshold function | 5.016 | 0.081 | 0.831 |
| Band-pass filtering | −1.259 | 0.167 | 0.564 |
| Band-pass filtering | SNR/dB | RMSE | NCC |
| Δt21 (us) | Δt31 (us) | Δt41 (us) | Δt51 (us) | Results (mm) | Absolute Error (mm) | Relative Localization Error |
|---|---|---|---|---|---|---|
| 106.8 | 63.2 | 62.8 | 109.6 | (−215, −1, 680) | (5, 1, 10) | 1.55% |
| 106.6 | 63.4 | 63.4 | 110.0 | (−212, 0, 678) | (8, 0, 12) | 1.99% |
| 106.2 | 63.2 | 62.8 | 109.2 | (−219, −1, 700) | (1, 0, 10) | 1.39% |
| 107.6 | 64.0 | 62.4 | 109.6 | (−216, −7, 691) | (4, 7, 1) | 1.12% |
| 107.2 | 64.0 | 63.2 | 109.6 | (−208, −3, 663) | (12, 3, 27) | 4.10% |
| 106.8 | 63.2 | 62.4 | 109.6 | (−216, 0, 706) | (4, 0, 16) | 2.28% |
| 107.2 | 63.6 | 62.4 | 109.2 | (−215, −5, 679) | (5, 5, 11) | 1.81% |
| 108.2 | 63.5 | 63.2 | 109.6 | (−212, −1, 676) | (8, 1, 14) | 2.23% |
| 106.8 | 63.6 | 63.2 | 108.8 | (−218, −1, 712) | (2, 1, 22) | 3.05% |
| 108.4 | 63.4 | 63.4 | 109.2 | (−219, 0, 714) | (1, 0, 24) | 3.32% |
| Δt21 (us) | Δt31 (us) | Δt41 (us) | Δt51 (us) | Results (mm) | Absolute Error (mm) | Relative Localization Error |
|---|---|---|---|---|---|---|
| 90.8 | 91.2 | 90.0 | 92.8 | (−12, −5, 668) | (12, 5, 22) | 3.53% |
| 91.2 | 91.2 | 89.2 | 92.0 | (−11, −9, 699) | (11, 9, 9) | 2.44% |
| 91.2 | 90.8 | 89.6 | 92.4 | (−12, −5, 690) | (12, 5, 0) | 1.88% |
| 90.8 | 91.2 | 89.6 | 92.4 | (−11, −7, 686) | (11, 7, 4) | 1.98% |
| 91.2 | 90.8 | 89.2 | 92.0 | (−12, −7, 704) | (12, 7, 14) | 2.86% |
| 90.8 | 91.6 | 89.2 | 92.4 | (−5, −13, 708) | (5, 13, 18) | 3.30% |
| 91.2 | 91.2 | 89.2 | 91.6 | (−10, −9, 706) | (10, 9, 16) | 3.03% |
| 90.4 | 91.2 | 89.2 | 92.0 | (−11, −9, 699) | (11, 9, 9) | 2.44% |
| 90.8 | 90.2 | 89.6 | 92.4 | (−12, −2, 707) | (12, 2, 17) | 3.48% |
| 90.8 | 90.8 | 89.2 | 92.4 | (−14, −7, 690) | (14, 7, 0) | 2.27% |
| Δt21 (us) | Δt31 (us) | Δt41 (us) | Δt51 (us) | Results (mm) | Absolute Error (mm) | Relative Localization Error |
|---|---|---|---|---|---|---|
| 63.4 | 109.2 | 109.4 | 63.2 | (214, 0, 688) | (6, 0, 2) | 0.87% |
| 63.4 | 108.8 | 109.0 | 63.2 | (218, 0, 708) | (2, 0, 18) | 2.50% |
| 62.8 | 109.2 | 109.4 | 62.8 | (222, 0, 707) | (2, 0, 17) | 2.36% |
| 63.0 | 109.2 | 109.0 | 62.8 | (222, −1, 711) | (2, 1, 21) | 2.91% |
| 63.0 | 109.2 | 109.0 | 62.4 | (223, −2, 711) | (3, 2, 21) | 2.94% |
| 63.8 | 109.6 | 109.0 | 63.2 | (214, −3, 691) | (6, 3, 1) | 0.94% |
| 63.4 | 109.2 | 108.6 | 62.8 | (222, −3, 718) | (2, 3, 28) | 3.90% |
| 63.4 | 109.2 | 109.8 | 62.8 | (211, −2, 663) | (9, 2, 27) | 3.94% |
| 63.0 | 109.2 | 109.4 | 62.8 | (219, 0, 697) | (1, 0, 7) | 0.98% |
| 63.4 | 108.8 | 109.0 | 63.2 | (218, 0, 708) | (2, 0, 18) | 2.5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, H.; Liu, X.; Zhang, J.; Liu, L. Spatial Localization of a Transformer Robot Based on Ultrasonic Signal Wavelet Decomposition and PHAT-β-γ Generalized Cross Correlation. Sensors 2024, 24, 1440. https://doi.org/10.3390/s24051440
Ji H, Liu X, Zhang J, Liu L. Spatial Localization of a Transformer Robot Based on Ultrasonic Signal Wavelet Decomposition and PHAT-β-γ Generalized Cross Correlation. Sensors. 2024; 24(5):1440. https://doi.org/10.3390/s24051440
Chicago/Turabian StyleJi, Hongxin, Xinghua Liu, Jianwen Zhang, and Liqing Liu. 2024. "Spatial Localization of a Transformer Robot Based on Ultrasonic Signal Wavelet Decomposition and PHAT-β-γ Generalized Cross Correlation" Sensors 24, no. 5: 1440. https://doi.org/10.3390/s24051440