

Exploring Safety–Stability Tradeoffs in Cooperative CAV Platoon Controls with Bidirectional Impacts

Abstract
:1. Introduction
2. Literature Review
3. Methodology
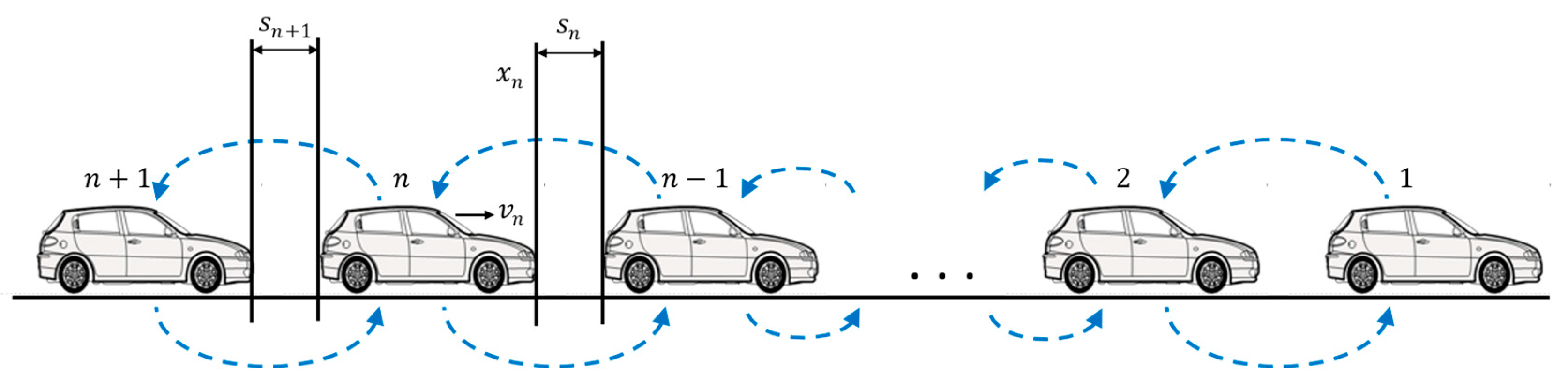
3.1. Vehicle Longitudinal Dynamics Models with Bidirectional Information Flow
3.2. Phase Shift Effects
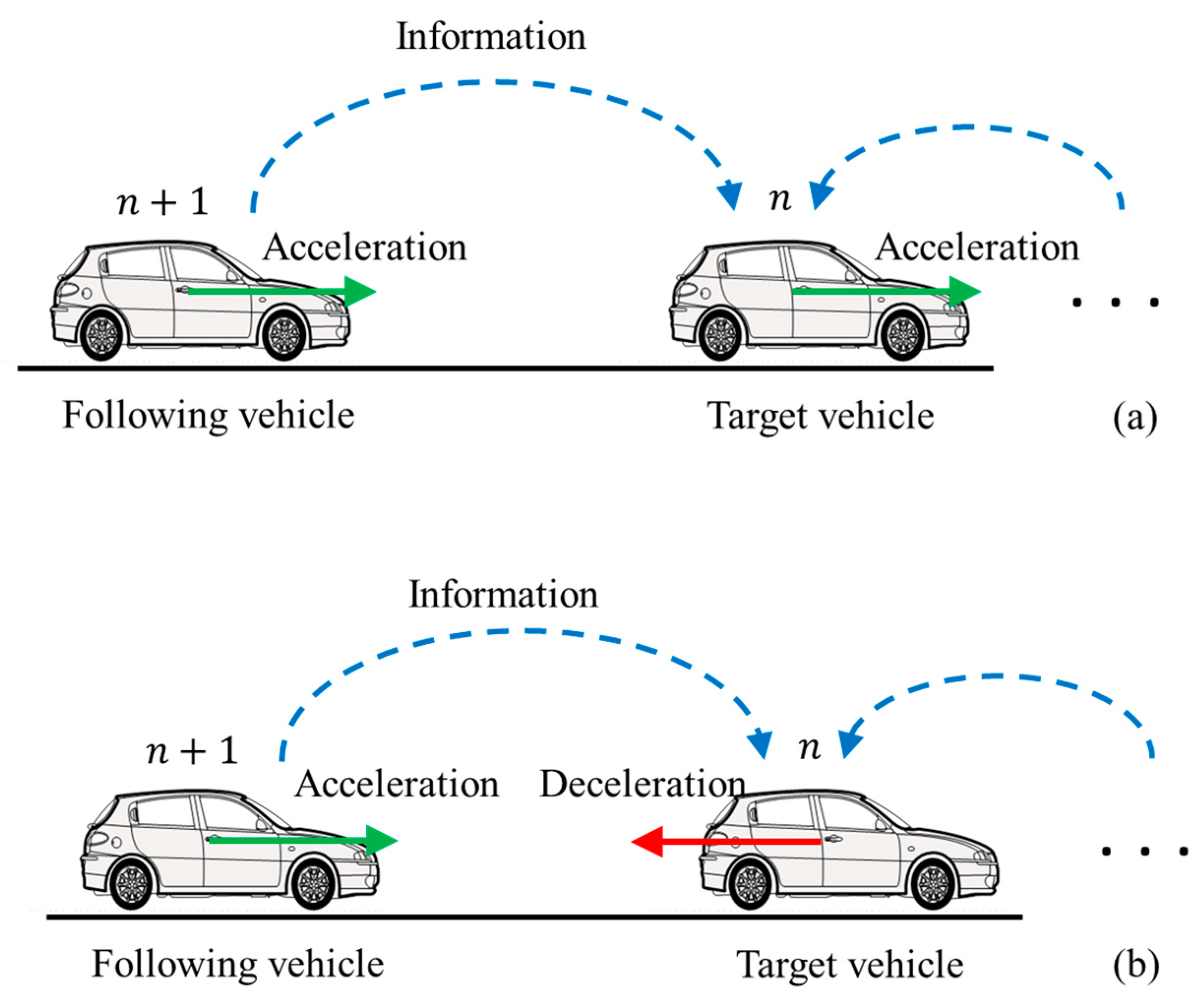
3.3. Phase Shift Effects in Bidirectional Communication
3.4. Assessment of Rear-End Collision Risk
3.5. String Stability Analysis
3.6. Tradeoff between Platoon Safety and String Stability
4. Analytical Verification on Specific Car-Following Models
4.1. Linear Car-following Model
4.2. Non-Linear Car-following Model
5. Numerical Verification
5.1. Numerical Investigation on Helly’s Model with Bidirectional Information
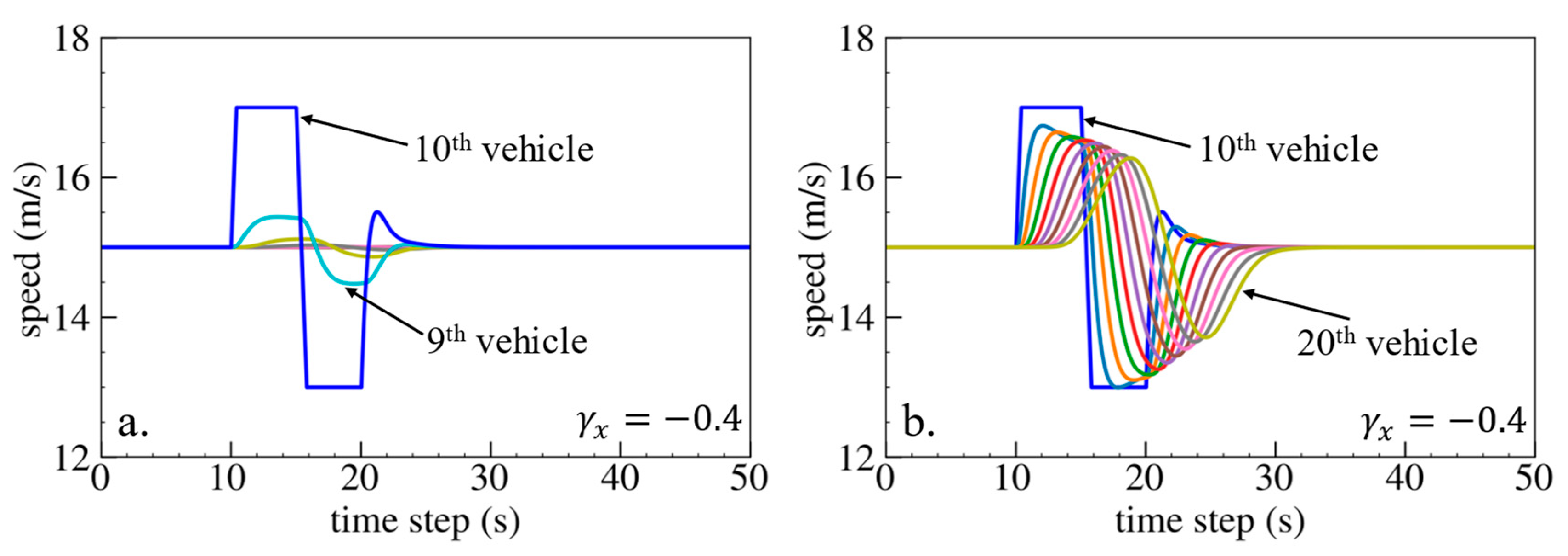
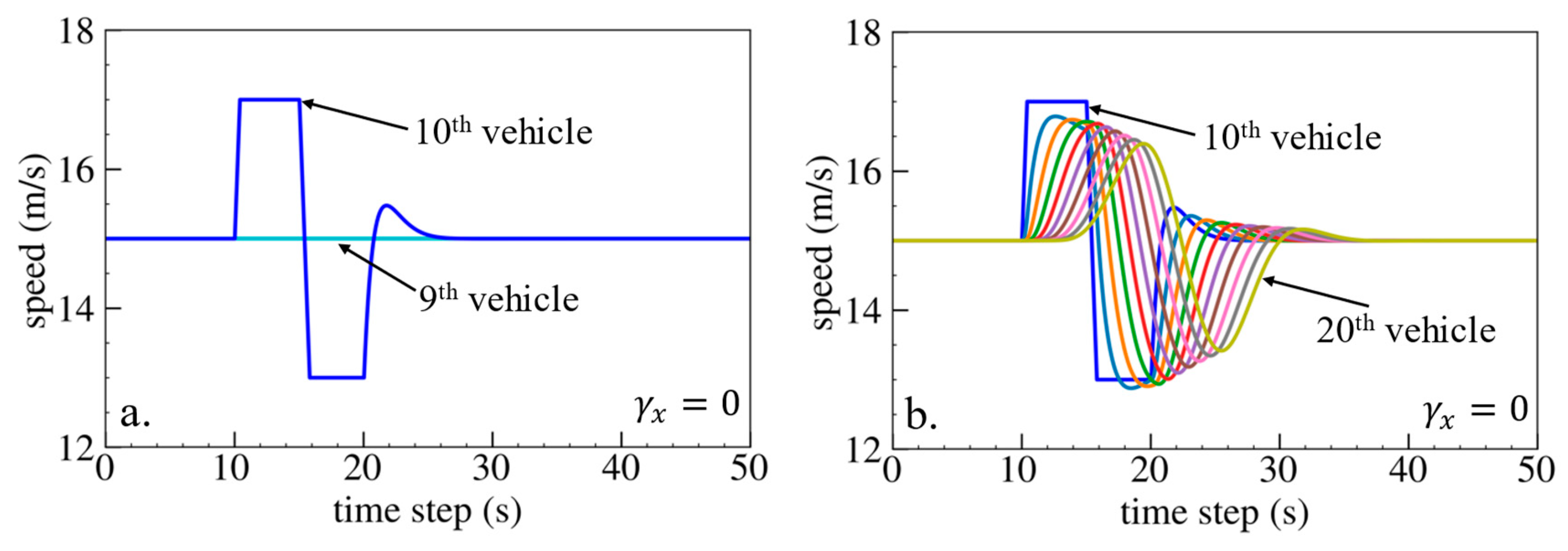
5.2. Numerical Investigation on the IDM with Bidirectional Information
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gong, S.; Zhou, A.; Peeta, S. Cooperative adaptive cruise control for a platoon of connected and autonomous vehicles considering dynamic information flow topology. Transp. Res. Rec. 2019, 2673, 185–198. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.E.; Wang, J.; Cao, D.; Li, K. Stability and scalability of homogeneous vehicular platoon: Study on the influence of information flow topologies. IEEE Trans. Intell. Transp. Syst. 2015, 17, 14–26. [Google Scholar] [CrossRef]
- Li, K.; Ni, W.; Tovar, E.; Guizani, M. Optimal rate-adaptive data dissemination in vehicular platoons. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4241–4251. [Google Scholar] [CrossRef]
- Sidorenko, G.; Thunberg, J.; Sjöberg, K.; Vinel, A. Vehicle-to-vehicle communication for safe and fuel-efficient platooning. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 795–802. [Google Scholar]
- Luo, W.; Li, X.; Hu, J.; Hu, W. Modeling and optimization of connected and automated vehicle platooning cooperative control with measurement errors. Sensors 2023, 23, 9006. [Google Scholar] [CrossRef]
- Wei, Y.; He, X. Adaptive control for reliable cooperative intersection crossing of connected autonomous vehicles. Int. J. Mech. Syst. Dyn. 2022, 2, 278–289. [Google Scholar] [CrossRef]
- Zheng, Y. Dynamic Modeling and Distributed Control of Vehicular Platoon under the Four-Component Framework. Master’s Thesis, Tsinghua University, Beijing, China, 2015. [Google Scholar]
- Bian, Y.; Zheng, Y.; Li, S.E.; Wang, Z.; Xu, Q.; Wang, J.; Li, K. Reducing time headway for platoons of connected vehicles via multiple-predecessor following. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 1240–1245. [Google Scholar]
- Li, X. Trade-off between safety, mobility and stability in automated vehicle following control: An analytical method. Transp. Res. Part B Methodol. 2022, 166, 1–18. [Google Scholar] [CrossRef]
- Bando, M.; Hasebe, K.; Nakayama, A.; Shibata, A.; Sugiyama, Y. Dynamical model of traffic congestion and numerical simulation. Phys. Rev. E 1995, 51, 1035. [Google Scholar] [CrossRef]
- Chandler, R.E.; Herman, R.; Montroll, E.W. Traffic dynamics: Studies in car following. Oper. Res. 1958, 6, 165–184. [Google Scholar] [CrossRef]
- Treiber, M.; Hennecke, A.; Helbing, D. Congested traffic states in empirical observations and microscopic simulations. Phys. Rev. E 2000, 62, 1805. [Google Scholar] [CrossRef]
- Zhang, Y.; Ni, P.; Li, M.; Liu, H.; Yin, B. A new car-following model considering driving characteristics and preceding vehicle’s acceleration. J. Adv. Transp. 2017, 2017, 2437539. [Google Scholar] [CrossRef]
- Liu, F.; Cheng, R.; Zheng, P.; Ge, H. TDGL and mKdV equations for car-following model considering traffic jerk. Nonlinear Dyn. 2016, 83, 793–800. [Google Scholar] [CrossRef]
- Song, H.; Ge, H.; Chen, F.; Cheng, R. TDGL and mKdV equations for car-following model considering traffic jerk and velocity difference. Nonlinear Dyn. 2017, 87, 1809–1817. [Google Scholar] [CrossRef]
- Jin, S.; Wang, D.-H.; Yang, X.-R. Non-lane-based car-following model with visual angle information. Transp. Res. Rec. 2011, 2249, 7–14. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, L.; Peeta, S.; He, X.; Zheng, T.; Li, Y. A car-following model considering the effect of electronic throttle opening angle under connected environment. Nonlinear Dyn. 2016, 85, 2115–2125. [Google Scholar] [CrossRef]
- Sun, Y.; Ge, H.; Cheng, R. A car-following model considering the effect of electronic throttle opening angle over the curved road. Phys. A Stat. Mech. Its Appl. 2019, 534, 122377. [Google Scholar] [CrossRef]
- Hu, Y.; Ma, T.; Chen, J. Multi-anticipative bi-directional visual field traffic flow models in the connected vehicle environment. Phys. A Stat. Mech. Its Appl. 2021, 584, 126372. [Google Scholar] [CrossRef]
- Nakayama, A.; Sugiyama, Y.; Hasebe, K. Effect of looking at the car that follows in an optimal velocity model of traffic flow. Phys. Rev. E 2001, 65, 16112. [Google Scholar] [CrossRef] [PubMed]
- Hasebe, K.; Nakayama, A.; Sugiyama, Y. Dynamical model of a cooperative driving system for freeway traffic. Phys. Rev. E 2003, 68, 26102. [Google Scholar] [CrossRef] [PubMed]
- Ge, H.X.; Zhu, H.B.; Dai, S.Q. Effect of looking backward on traffic flow in a cooperative driving car following model. Eur. Phys. J. B-Condens. Matter Complex Syst. 2006, 54, 503–507. [Google Scholar] [CrossRef]
- Chen, C.; Cheng, R.; Ge, H. An extended car-following model considering driver’s sensory memory and the backward looking effect. Phys. A Stat. Mech. Its Appl. 2019, 525, 278–289. [Google Scholar] [CrossRef]
- Hou, P.; Yu, H.; Yan, C.; Hong, J. An extended car-following model based on visual angle and backward looking effect. Chin. J. Phys. 2017, 55, 2092–2099. [Google Scholar] [CrossRef]
- Ma, G.; Ma, M.; Liang, S.; Wang, Y.; Zhang, Y. An improved car-following model accounting for the time-delayed velocity difference and backward looking effect. Commun. Nonlinear Sci. Numer. Simul. 2020, 85, 105221. [Google Scholar] [CrossRef]
- Yi, Z.; Lu, W.; Qu, X.; Gan, J.; Li, L.; Ran, B. A bidirectional car-following model considering distance balance between adjacent vehicles. Phys. A Stat. Mech. Its Appl. 2022, 603, 127606. [Google Scholar] [CrossRef]
- Herman, R.; Montroll, E.W.; Potts, R.B.; Rothery, R.W. Traffic dynamics: Analysis of stability in car following. Oper. Res. 1959, 7, 86–106. [Google Scholar] [CrossRef]
- Yang, S.; Liu, W.; Sun, D.; Li, C. A new extended multiple Car-Following Model considering the Backward-Looking effect on traffic flow. J. Comput. Nonlinear Dyn. 2013, 8, 011016. [Google Scholar] [CrossRef]
- Sun, D.-H.; Liao, X.-Y.; Peng, G.-H. Effect of looking backward on traffic flow in an extended multiple car-following model. Phys. A Stat. Mech. Its Appl. 2011, 390, 631–635. [Google Scholar] [CrossRef]
- Yang, D.; Jin, P.; Pu, Y.; Ran, B. Safe distance car-following model including backward-looking and its stability analysis. Eur. Phys. J. B 2013, 86, 92. [Google Scholar] [CrossRef]
- Horn, B.K.P.; Wang, L. Wave equation of suppressed traffic flow instabilities. IEEE Trans. Intell. Transp. Syst. 2017, 19, 2955–2964. [Google Scholar] [CrossRef]
- Yi, Z.; Lu, W.; Xu, L.; Qu, X.; Ran, B. Intelligent back-looking distance driver model and stability analysis for connected and automated vehicles. J. Cent. South Univ. 2020, 27, 3499–3512. [Google Scholar] [CrossRef]
- Sarker, A.; Shen, H.; Rahman, M.; Chowdhury, M.; Dey, K.; Li, F.; Wang, Y.; Narman, H.S. A review of sensing and communication, human factors, and controller aspects for information-aware connected and automated vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 21, 7–29. [Google Scholar] [CrossRef]
- Ksouri, C.; Jemili, I.; Mosbah, M.; Belghith, A. Towards general Internet of Vehicles networking: Routing protocols survey. Concurr. Comput. Pract. Exp. 2022, 34, e5994. [Google Scholar] [CrossRef]
- Abbasi, I.A.; Shahid Khan, A. A review of vehicle to vehicle communication protocols for VANETs in the urban environment. Future Internet 2018, 10, 14. [Google Scholar] [CrossRef]
- Li, C.; Hu, Z.; Lu, Z.; Wen, X. Cooperative intersection with misperception in partially connected and automated traffic. Sensors 2021, 21, 5003. [Google Scholar] [CrossRef]
- Pariota, L.; Bifulco, G.N.; Brackstone, M. A linear dynamic model for driving behavior in car following. Transp. Sci. 2016, 50, 1032–1042. [Google Scholar] [CrossRef]
- Treiber, M.; Kesting, A. The intelligent driver model with stochasticity-new insights into traffic flow oscillations. Transp. Res. Procedia 2017, 23, 174–187. [Google Scholar] [CrossRef]
- Wang, P.; Wu, X.; He, X. Characterizing Connected and Automated Vehicle Platooning Vulnerability under Periodic Perturbation. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 3845–3850. [Google Scholar]
- Wang, P.; He, X.; Wei, Y.; Wu, X.; Wang, Y. Damping behavior analysis for connected automated vehicles with linear car following control. Transp. Res. Part C Emerg. Technol. 2022, 138, 103617. [Google Scholar] [CrossRef]
- Wang, P.; Wu, X.; He, X. Vibration-Theoretic Approach to Vulnerability Analysis of Nonlinear Vehicle Platoons. IEEE Trans. Intell. Transp. Syst. 2023, 24, 11334–11344. [Google Scholar] [CrossRef]
- Ballou, G. Handbook for Sound Engineers; Taylor & Francis: Abingdon, UK, 2013; ISBN 1-136-12254-0. [Google Scholar]
- Hillbrand, J.; Auth, D.; Piccardo, M.; Opačak, N.; Gornik, E.; Strasser, G.; Capasso, F.; Breuer, S.; Schwarz, B. In-phase and anti-phase synchronization in a laser frequency comb. Phys. Rev. Lett. 2020, 124, 023901. [Google Scholar] [CrossRef]
- Tak, S.; Kim, S.; Yeo, H. Development of a deceleration-based surrogate safety measure for rear-end collision risk. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2435–2445. [Google Scholar] [CrossRef]
- Hayward, J.C. Near miss determination through use of a scale of danger. In Proceedings of the 51st Annual Meeting of the Highway Research Board, Washington, DC, USA, 17–21 January 1972. [Google Scholar]
- Wang, P.; Wu, X.; He, X. Modeling and analyzing cyberattack effects on connected automated vehicular platoons. Transp. Res. Part C Emerg. Technol. 2020, 115, 102625. [Google Scholar] [CrossRef]
- Li, Z.; Li, W.; Xu, S.; Qian, Y. Stability analysis of an extended intelligent driver model and its simulations under open boundary condition. Phys. A Stat. Mech. Its Appl. 2015, 419, 526–536. [Google Scholar] [CrossRef]
- Ge, H.; Dai, S.; Dong, L.; Xue, Y. Stabilization effect of traffic flow in an extended car-following model based on an intelligent transportation system application. Phys. Rev. E 2004, 70, 066134. [Google Scholar] [CrossRef] [PubMed]
- Treiber, M.; Kesting, A. Traffic flow dynamics: Data, models and simulation. Phys. Today 2014, 67, 54. [Google Scholar]
- Ngoduy, D. Linear stability of a generalized multi-anticipative car following model with time delays. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 420–426. [Google Scholar] [CrossRef]
- Mohammadian, S.; Zheng, Z.; Haque, M.M.; Bhaskar, A. Continuum modeling of freeway traffic flows: State-of-the-art, challenges and future directions in the era of connected and automated vehicles. Commun. Transp. Res. 2023, 3, 100107. [Google Scholar] [CrossRef]
- Do, W.; Rouhani, O.M.; Miranda-Moreno, L. Simulation-based connected and automated vehicle models on highway sections: A literature review. J. Adv. Transp. 2019, 2019, 9343705. [Google Scholar] [CrossRef]
- Patil, P. A Review of Connected and Automated Vehicle Traffic Flow Models for Next-Generation Intelligent Transportation Systems. Appl. Res. Artif. Intell. Cloud Comput. 2018, 1, 10–22. [Google Scholar]
- Chen, N.; van Arem, B.; Alkim, T.; Wang, M. A hierarchical model-based optimization control approach for cooperative merging by connected automated vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 22, 7712–7725. [Google Scholar] [CrossRef]
- Helly, W. Simulation of bottlenecks in single-lane traffic flow. In Proceedings of the Symposium on Theory of Traffic Flow; Elsevier: Amsterdam, The Netherlands, 1959. [Google Scholar]
- Zhou, M.; Qu, X.; Jin, S. On the impact of cooperative autonomous vehicles in improving freeway merging: A modified intelligent driver model-based approach. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1422–1428. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X.; Tarko, A. Modeling car-following behavior on urban expressways in Shanghai: A naturalistic driving study. Transp. Res. Part C Emerg. Technol. 2018, 93, 425–445. [Google Scholar] [CrossRef]
- Kim, J.; Mahmassani, H.S. Correlated parameters in driving behavior models: Car-following example and implications for traffic microsimulation. Transp. Res. Rec. 2011, 2249, 62–77. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Information Used | Publications |
|---|---|
| Spacing | [20,21,22,23,24,25,26] |
| Velocity difference | [27] |
| Both spacing and velocity difference | [19,28,29,30,31,32] |
| Control Model | Spacing Information | Rear-End Collision Risk | String Stability |
|---|---|---|---|
| In-Phase Effect | Decreased | Improved | |
| Opposite-Phase Effect | Increased | Worsened |
| Control Model | Velocity Difference Information | Rear-End Collision Risk | String Stability |
|---|---|---|---|
| In-Phase Effect | Decreased | Worsened | |
| Opposite-Phase Effect | Increased | Improved |
| 1 | 2 | 120 | 2 |
| Initial Speed (m/s) | |||
|---|---|---|---|
| 15 | 1 | 1 | 0.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, Y.; He, X. Exploring Safety–Stability Tradeoffs in Cooperative CAV Platoon Controls with Bidirectional Impacts. Sensors 2024, 24, 1614. https://doi.org/10.3390/s24051614
Wei Y, He X. Exploring Safety–Stability Tradeoffs in Cooperative CAV Platoon Controls with Bidirectional Impacts. Sensors. 2024; 24(5):1614. https://doi.org/10.3390/s24051614
Chicago/Turabian StyleWei, Yu, and Xiaozheng He. 2024. "Exploring Safety–Stability Tradeoffs in Cooperative CAV Platoon Controls with Bidirectional Impacts" Sensors 24, no. 5: 1614. https://doi.org/10.3390/s24051614