
Topology Optimization Design Method for Acoustic Imaging Array of Power Equipment

Abstract
1. Introduction
2. Basic Principles of Acoustic Imaging Technology
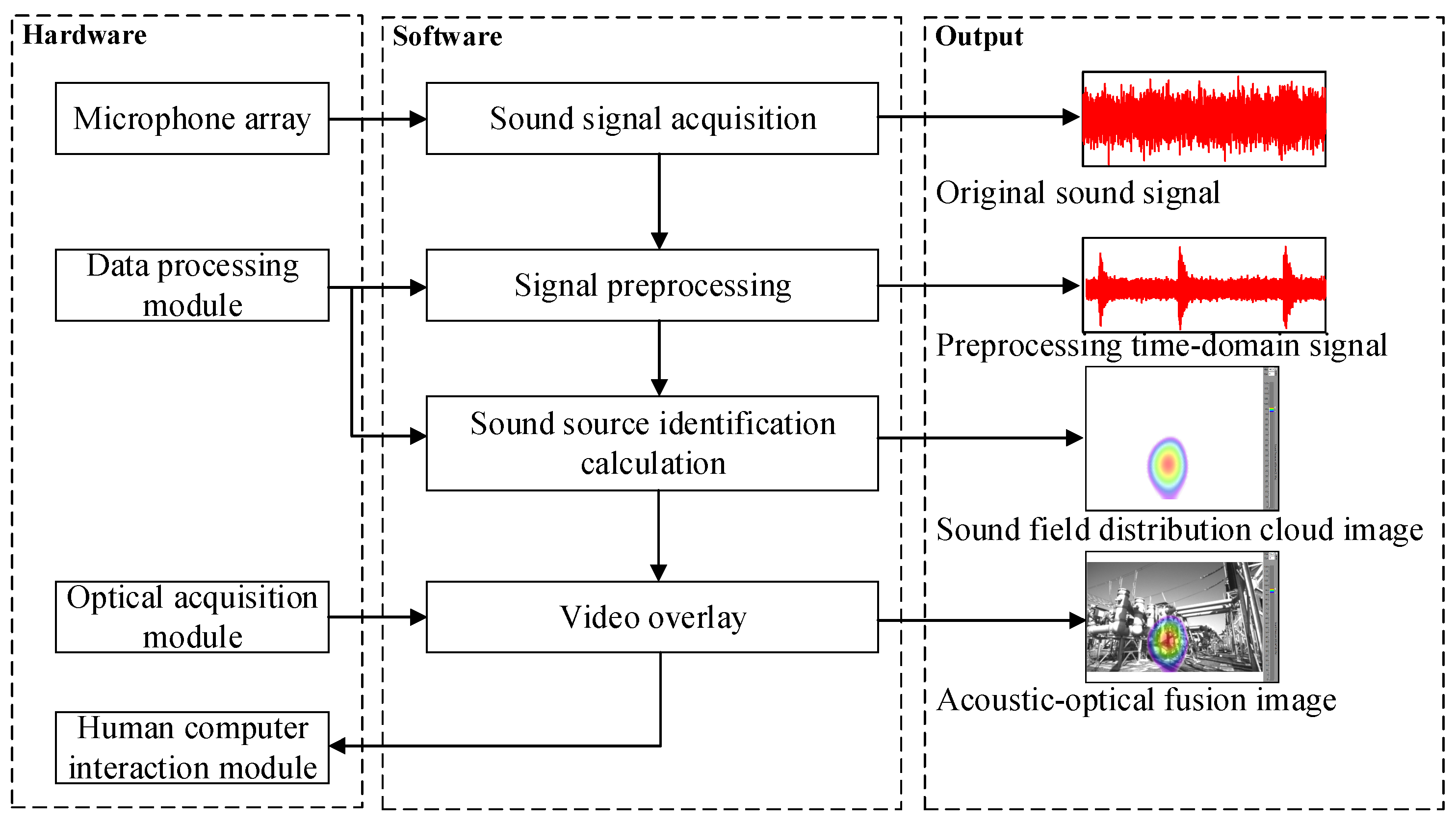
2.1. Process and System Composition of Acoustic Imaging
- The microphone array collects the original time domain sound signal.
- The time domain signal is preprocessed, including two types of operations. They are noise reduction and amplitude enhancement.
- The sound source distribution information on the sound source-focusing plane is calculated in real-time, so that the sound field distribution cloud images are formed.
- The real-time optical images can be obtained through the optical acquisition module.
- The sound field distribution cloud image is transparently superimposed on the optical image, forming the acoustic–optical fusion image.
- The sound source spatial position can be very intuitive to see from the fusion image which parts of the power equipment show the most obvious acoustic characteristics. It should be noted that through the fusion image, not only can a single sound source be clearly identified but it is also expected to accurately identify multiple sound sources.
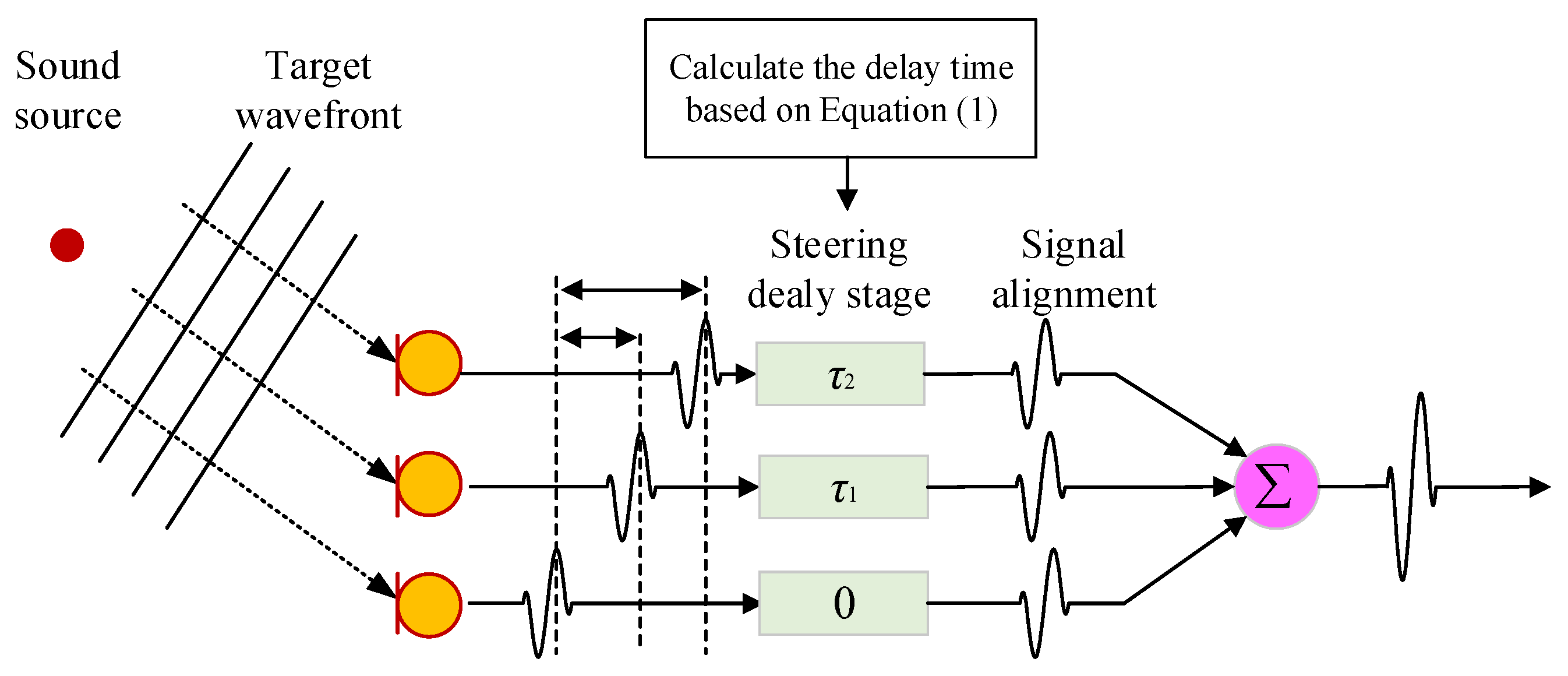
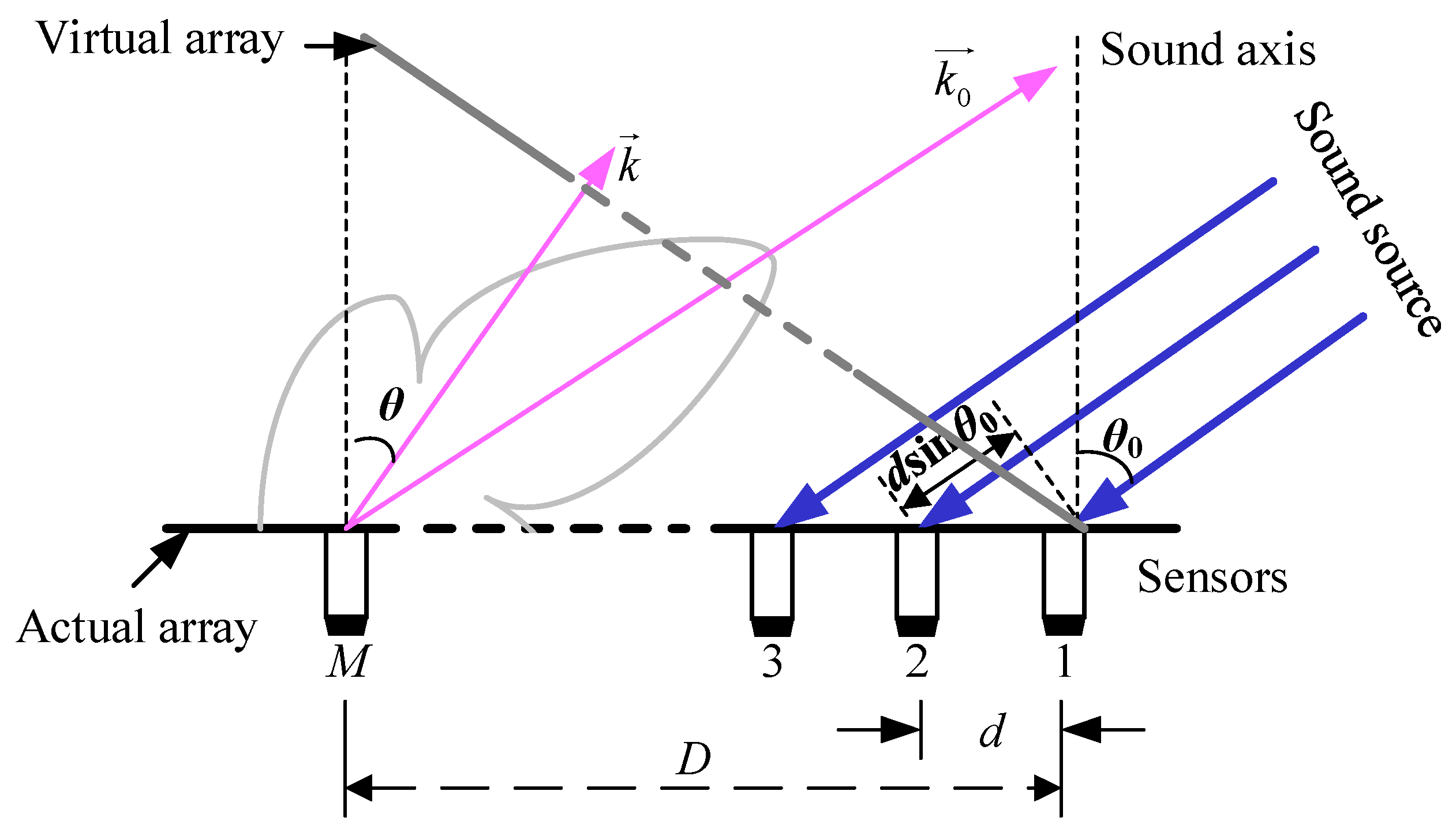
2.2. Sound Source Identification Algorithm
2.3. Acoustic Characteristics of Power Equipment
2.3.1. Acoustic Frequency Domain Characteristic Parameters
- Dominant frequency. It refers to the frequency with the highest amplitude in the spectrum.
- Proportion of odd harmonics (POH). It refers to the proportion of 50 Hz odd-fold frequency in total power, as shown in Equation (3).
- 3.
- Proportion of even harmonics (PEH). It refers to the proportion of 50 Hz even-fold frequency in total power, as shown in Equation (4).
- 4.
- Proportion of accumulated energy (PAE). It refers to the proportion of acoustic cumulative power within the frequency range of fL to fH, as shown in Equation (5).
2.3.2. Acoustic Frequency Domain Characteristics
3. Influence of Design Parameters on Performance of Microphone Array
3.1. Performance Evaluation Indexes of Microphone Array
- Directivity function
- 2.
- −3 dB MLW
- 3.
- MSL
- 4.
- Cut-off frequency
3.2. Preliminary Design of Microphone Array
- 1.
- LF instrument
- 2.
- HF instrument
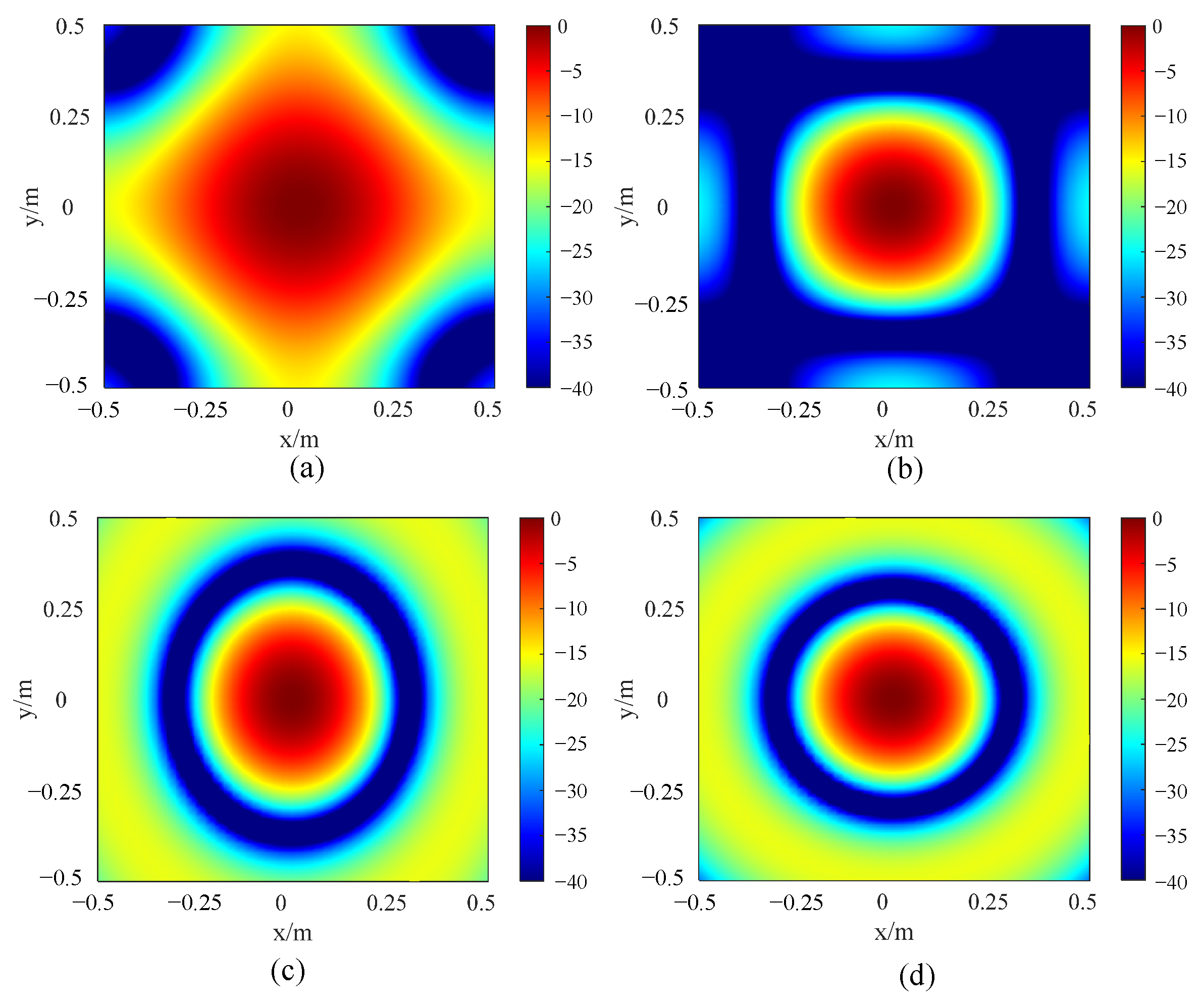
3.3. Influence of Array Shape
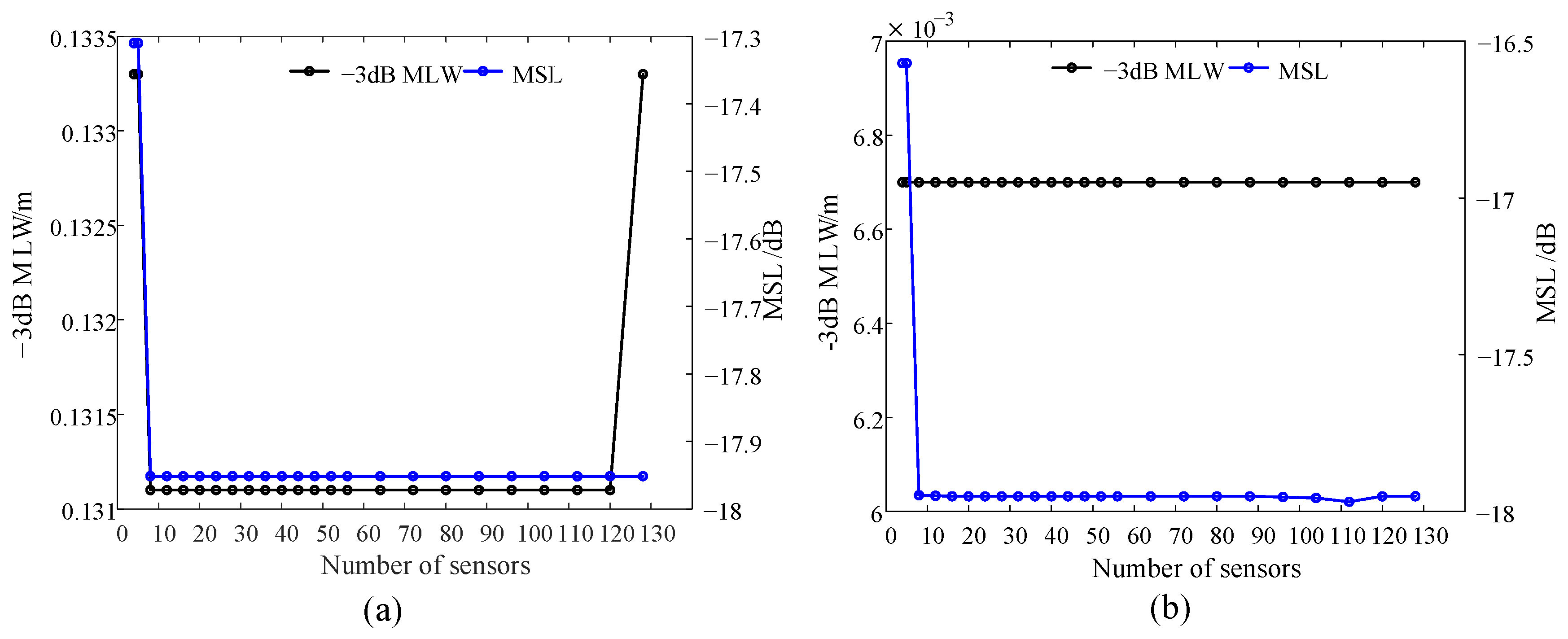
3.4. Influence of Number of Sensors
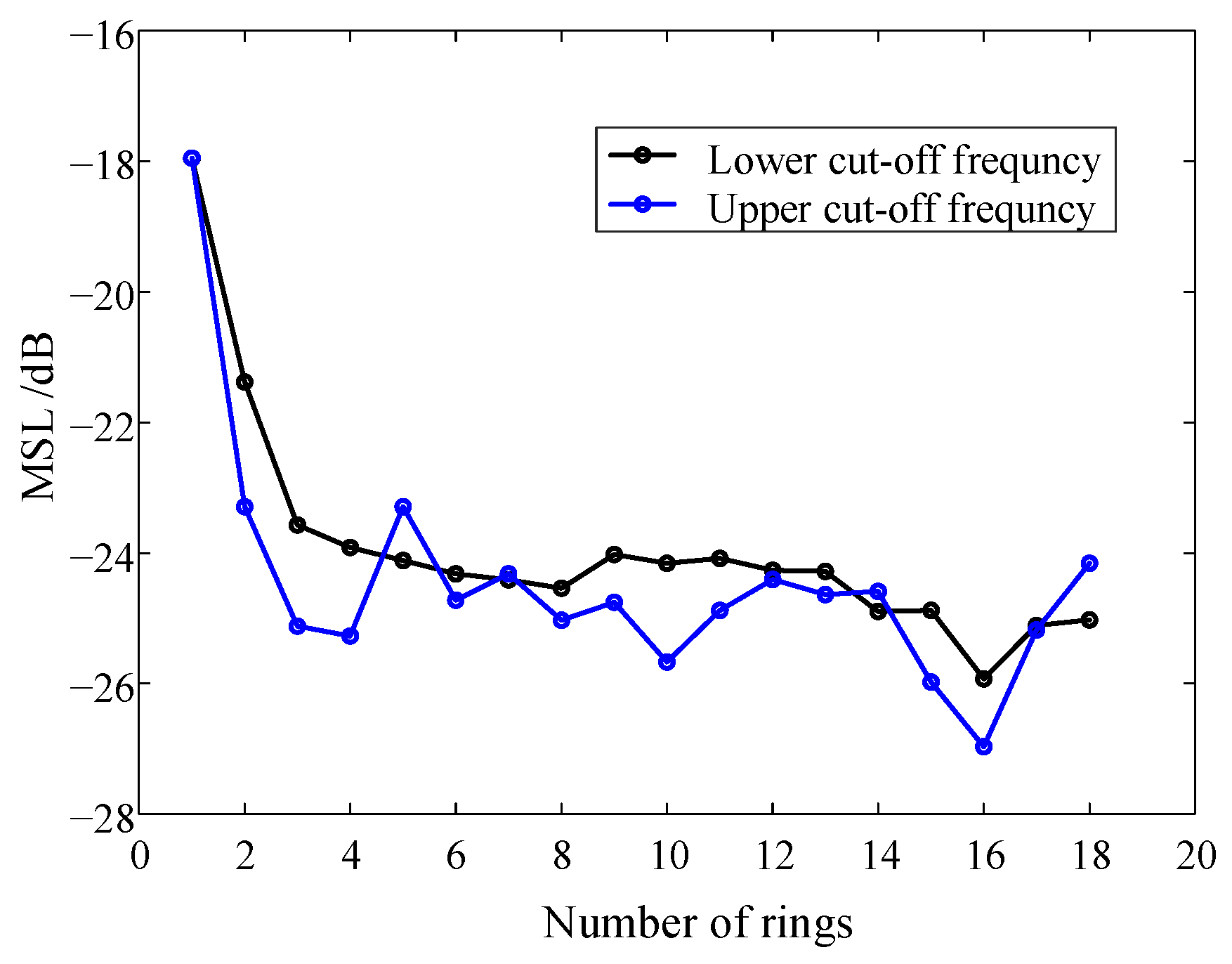
3.5. Influence of Number of Rings
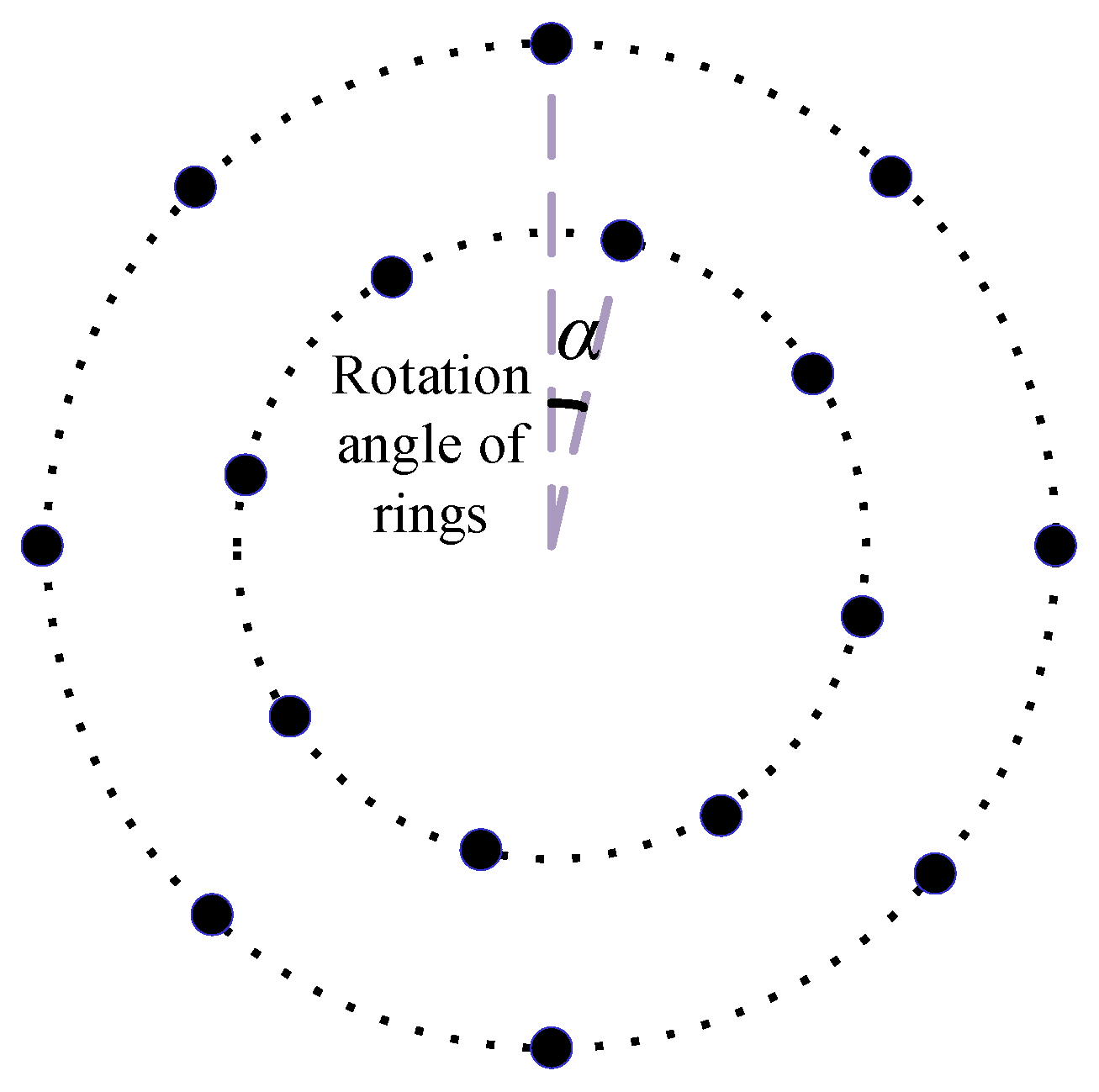
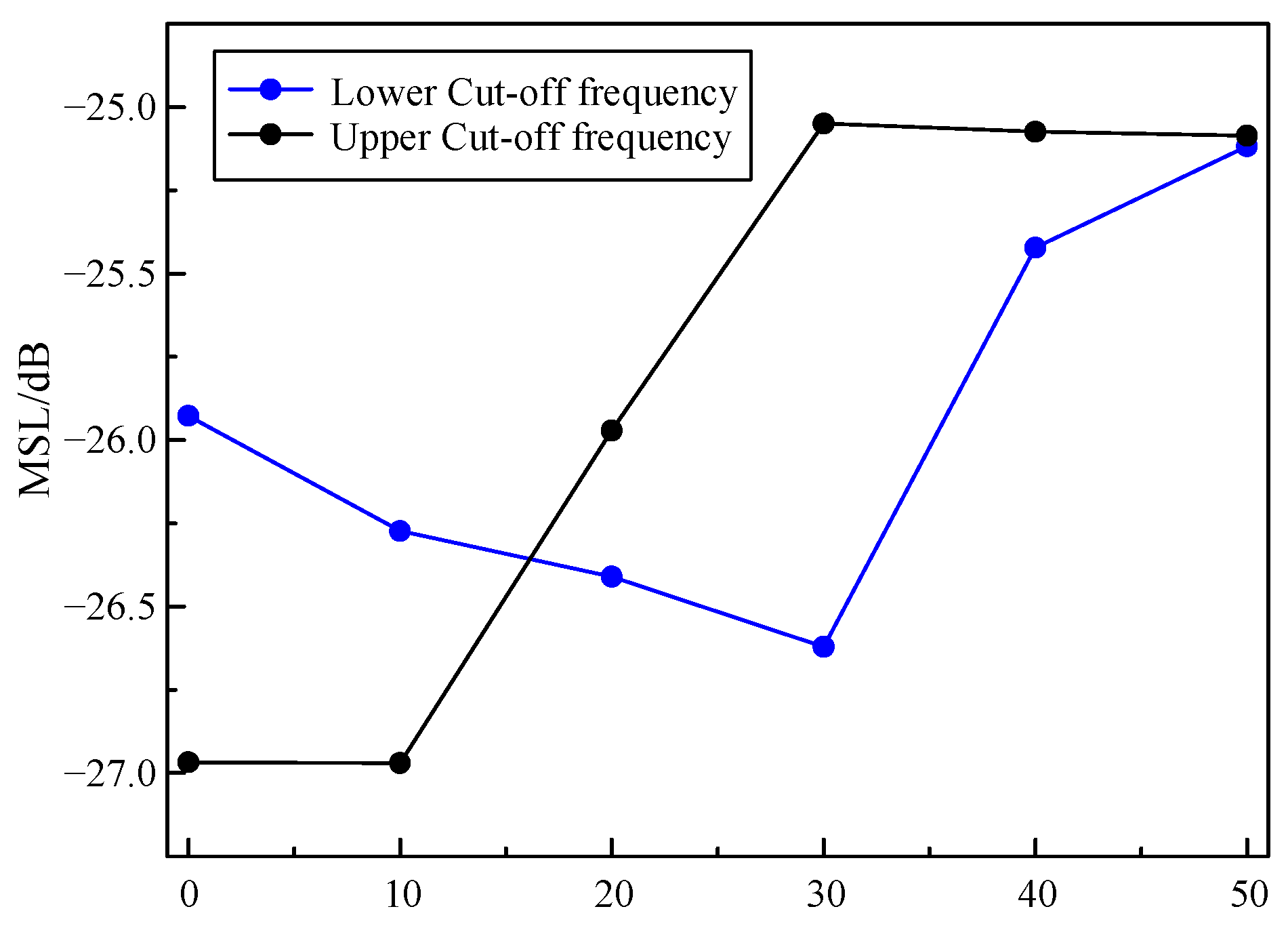
3.6. Influence of Rotation Angle of Ring
4. Optimization Design of Microphone Array
4.1. Mathematical Modeling of Optimization Problem
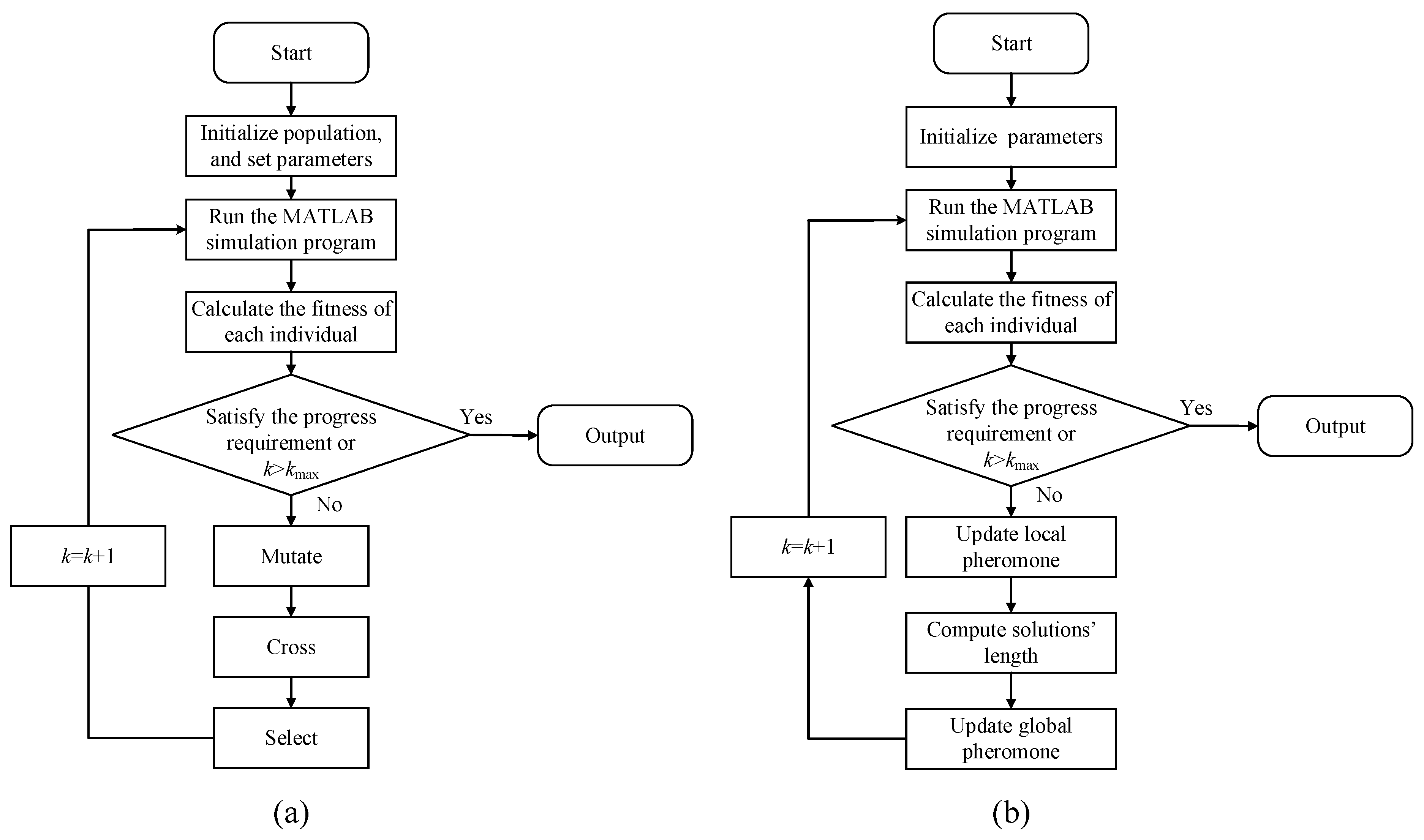
4.2. Optimization Algorithm
4.3. Optimization Results
4.3.1. LF Instrument
4.3.2. HF Instrument
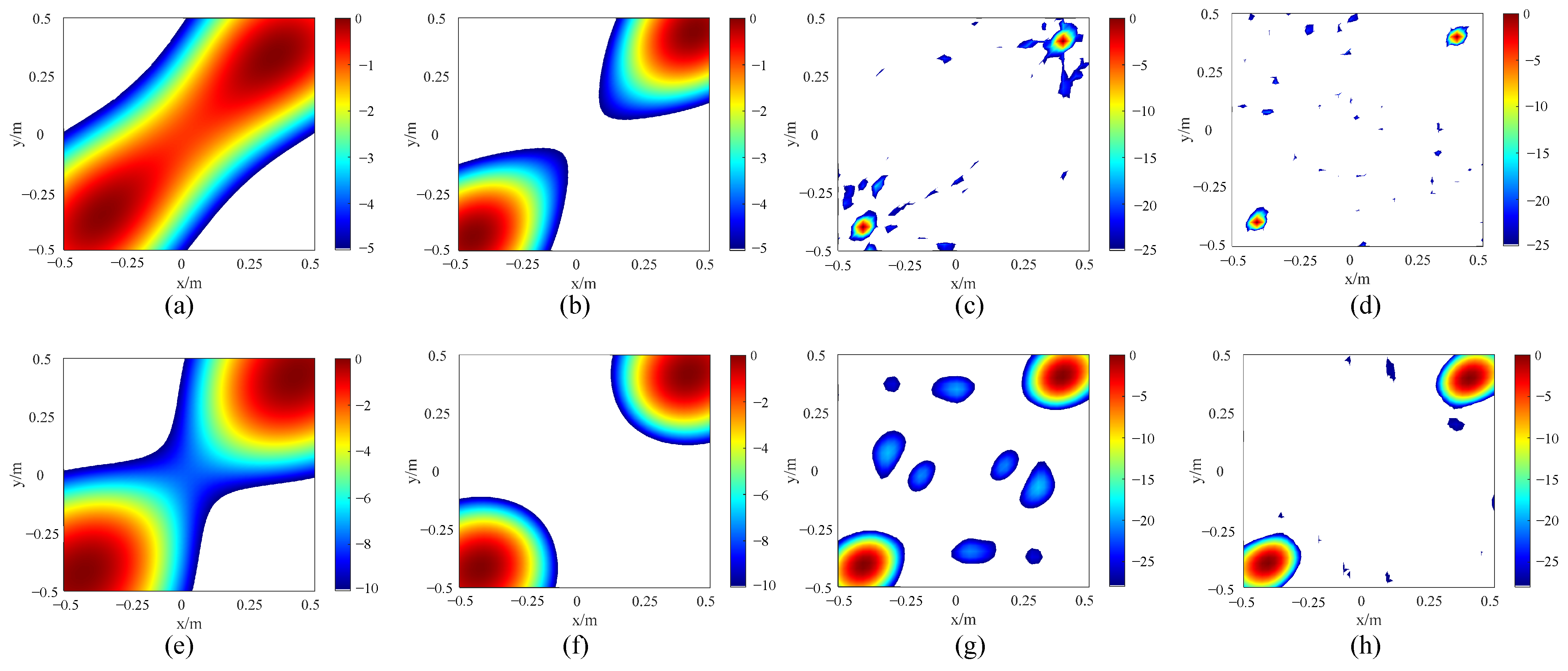
4.4. Simulation Verification
4.5. Laboratory Verification
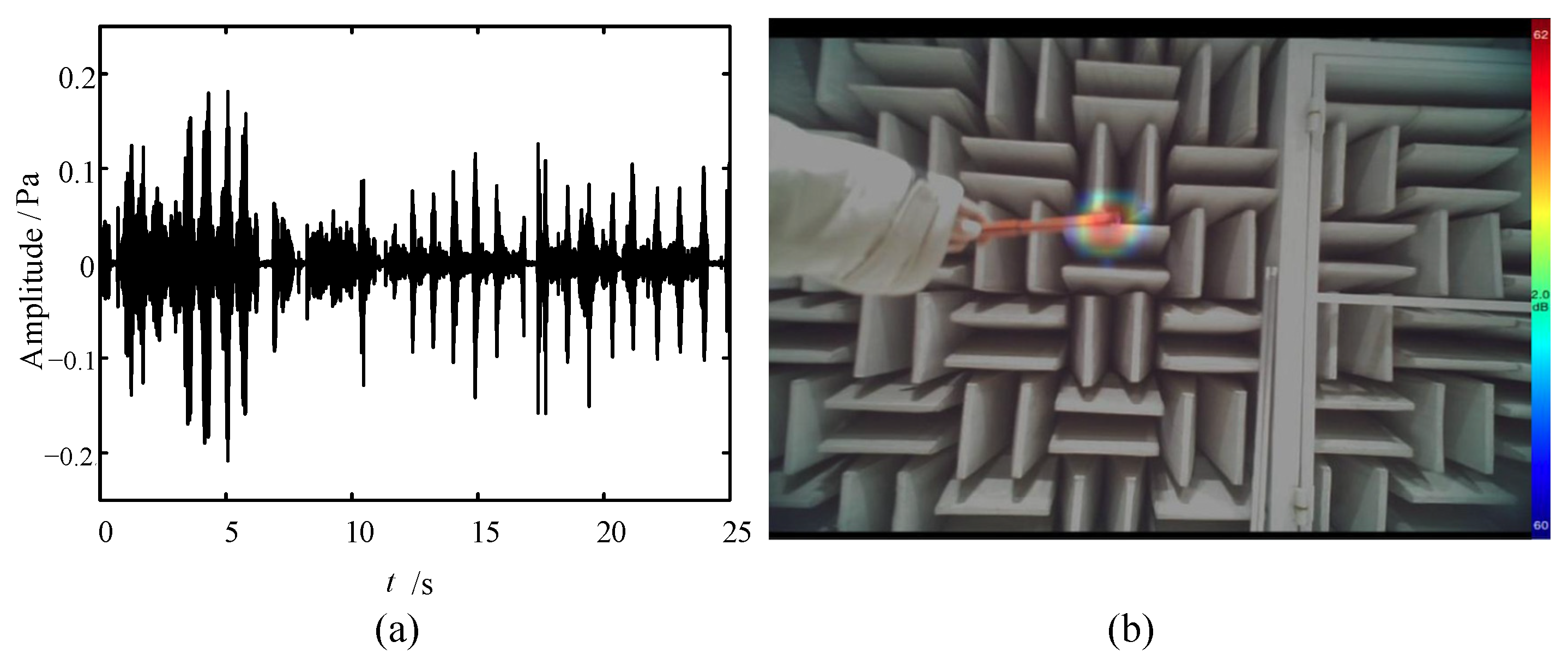
4.5.1. Steady Sound Source Test
4.5.2. Transient Sound Source Test
5. Conclusions
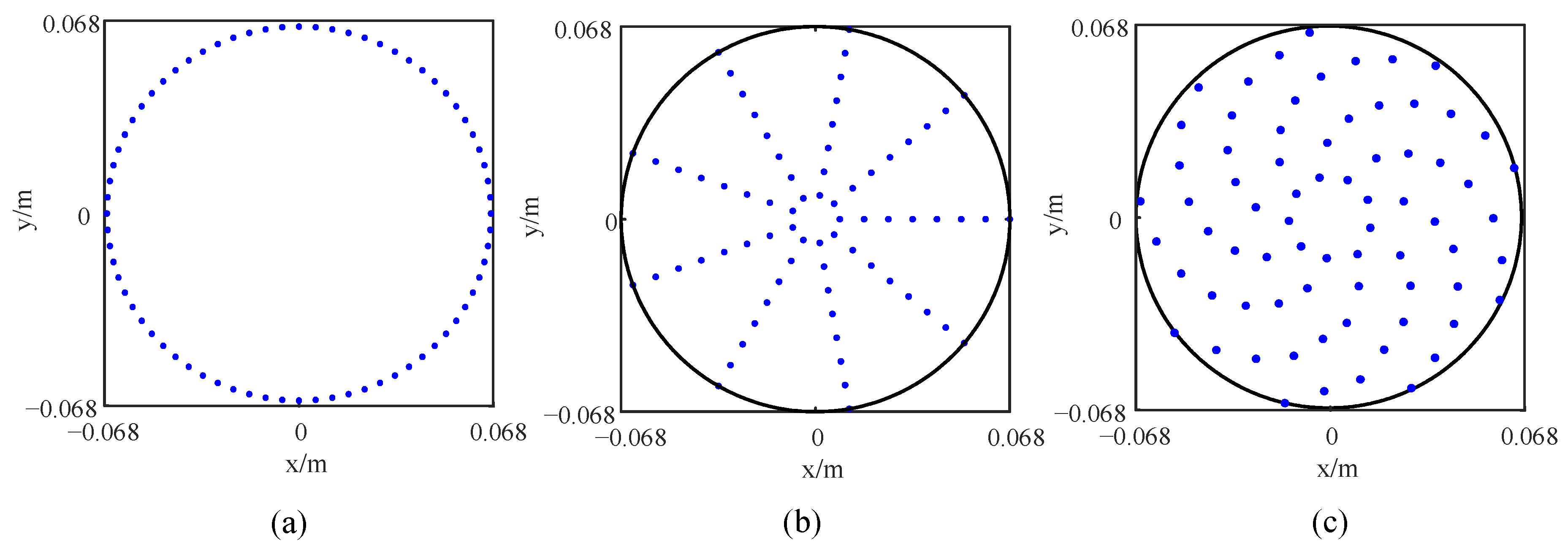
- The array shape greatly affects both the −3 dB MLW and the MSL, and the circular array is the optimal shape.
- The design parameters affect the imaging performance of the array to varying degrees, indicating that it is difficult to obtain the optimal array topology by an exhaustive method.
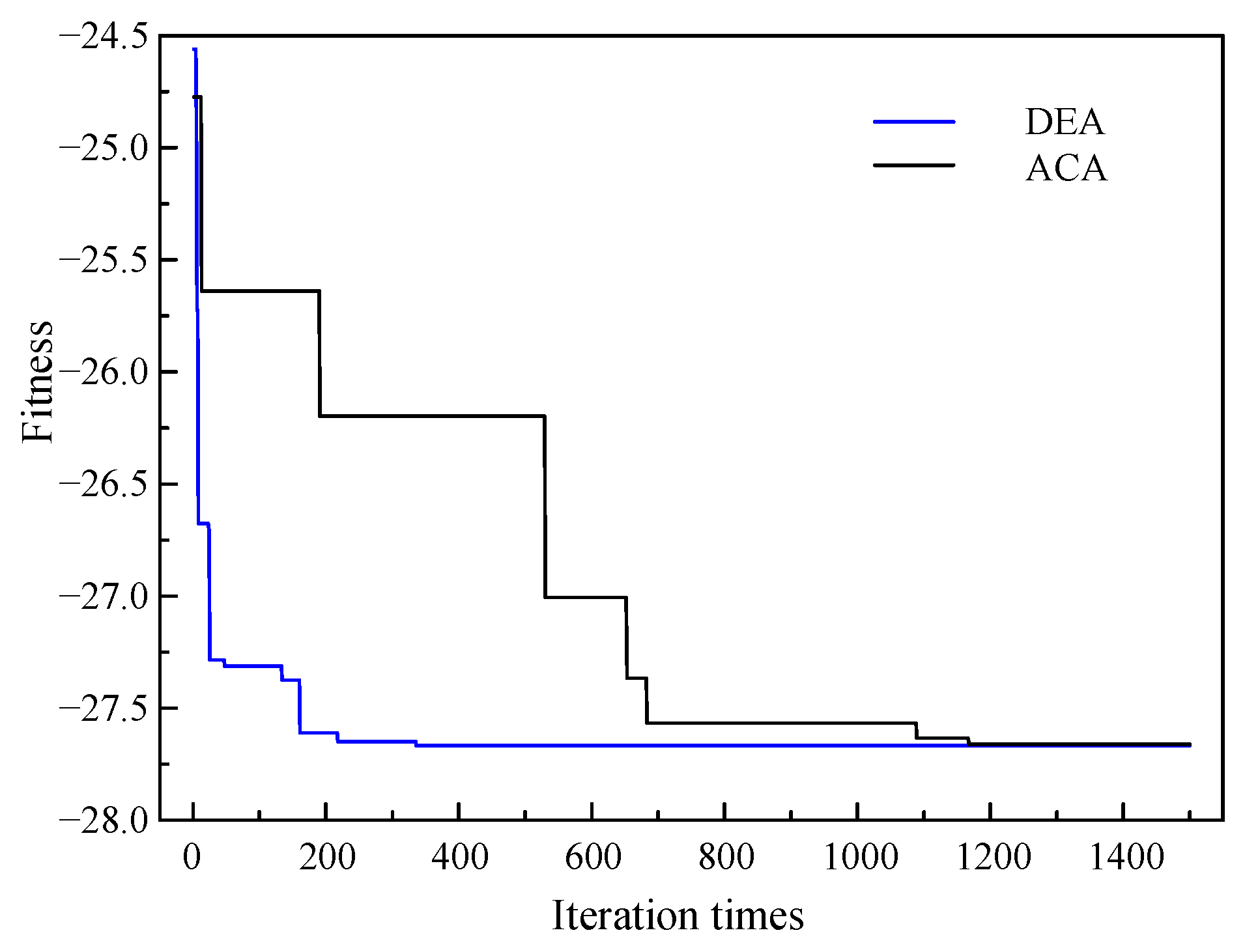
- The two optimization algorithms including the DEA and the ACA are used to solve the same optimization problem, and the results are proved to be the global optimal solutions. Compared with the original array, the performance of the improved LF and HF array is promoted by 54% and 49%, respectively, which verifies the effectiveness and feasibility of the optimization method proposed in this paper.
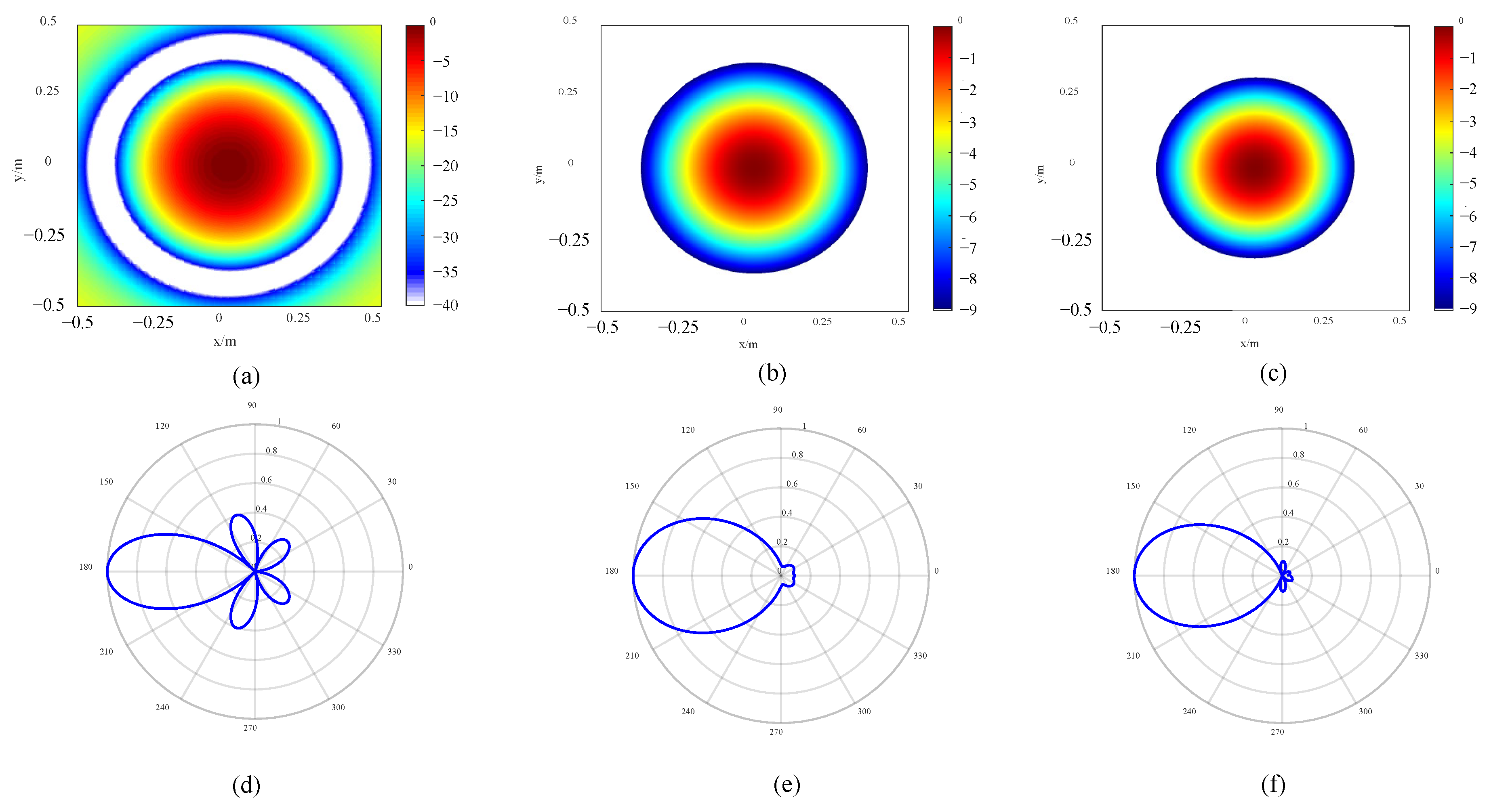
- Combined with the simulation analysis and laboratory test, a variety of defects in the field are simulated. It is verified that the improved array can not only accurately locate a steady or transient sound source but also accurately distinguish the main sound source from the interference of a contiguous sound source.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Z.; Li, J.; Song, Y.; Sun, Y.; Zhang, X.; Hu, Y.; Guo, R.; Han, X. A Novel Ultrasound-Vibration Composite Sensor for Defects Detection of Electrical Equipment. IEEE Trans. Power Del. 2022, 37, 4477–4480. [Google Scholar] [CrossRef]
- Guo, M.; Guo, Y.; Peng, Y.; Zhang, W.; Ling, Q. Fault diagnosis of bolt loosening based on LightGBM recognition of sound signal features. IEEE Sens. J. 2023, 23, 22777–22787. [Google Scholar] [CrossRef]
- Zang, Y.; Qian, Y.; Wang, H.; Xu, A.; Zhou, X.; Sheng, G.; Jiang, X. A novel optical localization method for partial discharge source using ANFIS virtual sensors and simulation fingerprint in GIL. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Wang, B.; Dong, M.; Ren, M.; Wu, Z.; Guo, C.; Zhuang, T.; Pischler, O.; Xie, J. Automatic fault diagnosis of infrared insulator images based on image instance segmentation and temperature analysis. IEEE Trans. Instrum. Meas. 2020, 69, 5345–5355. [Google Scholar] [CrossRef]
- Dong, M.; Wang, B.; Ren, M.; Zhang, C.; Zhao, W.; Albarracin, R. Joint visualization diagnosis of outdoor insulation status with optical and acoustical detections. IEEE Trans. Power Del. 2018, 34, 1221–1229. [Google Scholar] [CrossRef]
- Ghanizadeh, A.J.; Gharehpetian, G.B. ANN and cross-correlation based features for discrimination between electrical and mechanical defects and their localization in transformer winding. IEEE Trans. Dielectr. Electr. Insul. 2014, 21, 2374–2382. [Google Scholar]
- Bagheri, S.; Moravej, Z.; Gharehpetian, G.B. Classification and discrimination among winding mechanical defects, internal and external electrical faults, and inrush current of transformer. IEEE Trans Ind. Informat. 2017, 14, 484–493. [Google Scholar] [CrossRef]
- Dai, D.; Liao, Q.; Sang, Z.; You, Y.; Qiao, R.; Yuan, H. Audio General Recognition of Partial Discharge and Mechanical Defects in Switchgear Using a Smartphone. Appl. Sci. 2023, 13, 10153. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, B. Acoustic Multi-Parameter Early Warning Method for Transformer DC Bias State. Sensors 2022, 22, 2906. [Google Scholar] [CrossRef]
- Wu, X.; Li, L.; Zhou, N.; Lu, L.; Hu, S.; Cao, H.; He, Z. Diagnosis of DC Bias in Power Transformers Using Vibration Feature Extraction and a Pattern Recognition Method. Energies 2018, 11, 1775. [Google Scholar] [CrossRef]
- Yu, L.; Zhang, C.; Wang, R.; Yuan, G.; Wang, X. Grid-moving equivalent source method in a probability framework for the transformer discharge fault localization. Measurement 2022, 191, 110800. [Google Scholar] [CrossRef]
- Zhou, X.; Tian, T.; Li, X.; Chen, K.; Luo, Y.; He, N.; Liu, W.; Ma, Y.; Bai, J.; Zhang, X.; et al. Study on insulation defect discharge features of dry-type reactor based on audible acoustic. AIP Adv. 2022, 12, 025210. [Google Scholar] [CrossRef]
- Secic, A.; Krpan, M.; Kuzle, I. Vibro-acoustic methods in the condition assessment of power transformers: A survey. IEEE Access. 2019, 7, 83915–83931. [Google Scholar] [CrossRef]
- Wang, G.; Wang, Y.; Min, Y.; Lei, W. Blind Source Separation of Transformer Acoustic Signal Based on Sparse Component Analysis. Energies 2022, 15, 6017. [Google Scholar] [CrossRef]
- Guo, J.; Liu, S.; Yu, K.; Chen, X.; Liu, Y.; Lü, F. An Ultrahigh Voltage Shunt Reactor Acoustic Signal Separation Method Based on Masking Beamforming and Underdetermined Blind Source Separation. IEEE Trans. Instrum. Meas. 2023, 72, 1–8. [Google Scholar] [CrossRef]
- Yaman, O.; Yol, F.; Altinors, A. A Fault Detection Method Based on Embedded Feature Extraction and SVM Classification for UAV Motors. Microprocess. Microsyst. 2022, 94, 104683. [Google Scholar] [CrossRef]
- Han, S.; Wang, B.; Liao, S.; Gao, F.; Chen, M. Defect Identification Method for Transformer End Pad Falling Based on Acoustic Stability Feature Analysis. Sensors 2023, 23, 3258. [Google Scholar] [CrossRef]
- Gong, C.S.A.; Su, C.H.S.; Liu, Y.E.; Guu, D.Y.; Chen, Y.H. Deep Learning with LPC and Wavelet Algorithms for Driving Fault Diagnosis. Sensors 2022, 22, 7072. [Google Scholar] [CrossRef] [PubMed]
- Sun, C.; Yang, Y.; Wen, C.; Xie, K.; Wen, F. Voiceprint Identification for Limited Dataset Using the Deep Migration Hybrid Model Based on Transfer Learning. Sensors 2018, 18, 2399. [Google Scholar] [CrossRef] [PubMed]
- Wan, S.; Dong, F.; Zhang, X.; Wu, W.; Li, J. Fault Voiceprint Signal Diagnosis Method of Power Transformer Based on Mixup Data Enhancement. Sensors 2023, 23, 3341. [Google Scholar] [CrossRef]
- Kraljević, L.; Russo, M.; Stella, M.; Sikora, M. Free-field TDOA-AOA sound source localization using three soundfield microphones. IEEE Access 2020, 8, 87749–87761. [Google Scholar] [CrossRef]
- Parsayan, A.; Ahadi, S.M. Real time high accuracy 3-D PHAT-based sound source localization using a simple 4-microphone arrangement. IEEE Syst. J. 2011, 6, 455–468. [Google Scholar] [CrossRef]
- Kumari, D.; Kumar, L. S2H Domain Processing for Acoustic Source Localization and Beamforming Using Microphone Array on Spherical Sector. IEEE Trans. Signal Process. 2021, 69, 1983–1994. [Google Scholar] [CrossRef]
- Li, Y.; Chen, H. Reverberation robust feature extraction for sound source localization using a small-sized microphone array. IEEE Sens. J. 2017, 17, 6331–6339. [Google Scholar] [CrossRef]
- Yook, D.; Lee, T.; Cho, Y. Fast sound source localization using two-level search space clustering. IEEE Trans. Cybern. 2015, 46, 20–26. [Google Scholar] [CrossRef]
- Chu, N.; Zhao, H.; Yu, L.; Huang, Q.; Ning, Y. Fast and high-resolution acoustic beamforming: A convolution accelerated deconvolution implementation. IEEE Trans. Instrum. Meas. 2020, 70, 1–15. [Google Scholar] [CrossRef]
- Liu, Q.; Chu, N.; Yu, L.; Ning, Y.; Wu, P. Efficient localization of low-frequency sound source with non-synchronous measurement at coprime positions by alternating direction method of multipliers. IEEE Trans. Instrum. Meas. 2022, 71, 1–12. [Google Scholar] [CrossRef]
- Chu, N.; Ning, Y.; Yu, L.; Huang, Q.; Wu, D. A high-resolution and low-frequency acoustic beamforming based on Bayesian inference and non-synchronous measurements. IEEE Access 2020, 8, 82500–82513. [Google Scholar] [CrossRef]
- Zhang, J. Study on Noise Source Identification and Sound Field Visualization based on Beamforming Techniques. Master’s Thesis, Hefei University of Technology, Hefei, China, 2010. (In Chinese). [Google Scholar]
- Wu, S. Study on Microphone Array Speech Enhancement Algorithm Based on Delay-sum Beamforming. Master’s Thesis, Xidian University, Xi’an, China, 2010. (In Chinese). [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operating Condition | Dominant Frequency | POH/PEH | PAE |
|---|---|---|---|
| GIS | |||
| Normal condition | 100 Hz | POH is low | Concentrated below 2 kHz |
| Mechanical vibration | ≥300 Hz | POH increases | Increase (300–2000 Hz) |
| Partial discharge | 100 Hz | POH increases | Increase (5k–25k Hz) |
| Breakdown discharge | ≥10 kHz | PEH decreases | Increase (≥5 kHz) |
| Power transformer/reactor | |||
| Normal condition | 100/200 Hz | POH is low | Concentrated below 2 kHz |
| Over excitation | ≥300 Hz | POH increases | Increase (500–2000 Hz) |
| DC magnetic bias | ≥300 Hz | POH increases | Increase (500–2000 Hz) |
| Iron-core multi-point earthing | Unchanged | Unchanged | Unchanged |
| Mechanical vibration | ≥300 Hz | Unchanged | Increase (500–2000 Hz) |
| Partial discharge | Unchanged | POH increases slightly | Increase (≥5 kHz) |
| Breakdown discharge | ≥10 kHz | POH increases | Increase (≥5 kHz) |
| Array Shape | −3 dB MLW/m | MSL/dB |
|---|---|---|
| Crossed | 0.1444 | −5.7810 |
| Rectangular | 0.0822 | −10.8860 |
| Elliptic | 0.1289 | −15.8514 |
| Circular | 0.0778 | −15.8520 |
| mmin | mmax | nmin | nmax | rmin | rmax | θmin | θmax |
|---|---|---|---|---|---|---|---|
| 40 | 128 | 2 | 18 | 0.08 | 0.85 | 0 | 50 |
| Serial Number of Rings | Radius of Rings | Number of Sensors | Rotation Angle |
|---|---|---|---|
| 1 | 0.085 | 7 | 18.55 |
| 2 | 0.189 | 7 | 22.87 |
| 3 | 0.269 | 7 | 18.55 |
| 4 | 0.340 | 7 | 22.79 |
| 5 | 0.400 | 7 | 19.32 |
| 6 | 0.454 | 7 | 12.09 |
| 7 | 0.505 | 7 | 14.32 |
| 8 | 0.560 | 7 | 22.02 |
| 9 | 0.594 | 7 | 14.32 |
| 10 | 0.636 | 7 | 10.09 |
| 11 | 0.676 | 7 | 14.22 |
| 12 | 0.722 | 7 | 18.26 |
| 13 | 0.749 | 7 | 22.64 |
| 14 | 0.784 | 7 | 24.32 |
| 15 | 0.820 | 7 | 22.83 |
| 16 | 0.850 | 7 | 18.55 |
| Parameter | Original Array | Quasi-Improved Array | Improved Array | |
|---|---|---|---|---|
| DEA | ACA | |||
| MSL | −17.95 dB | −25.93 dB | −27.67 dB | −27.67 dB |
| MSL promotion | / | 44.46% | 54.15% | |
| mmin | mmax | nmin | nmax | rmin | rmax | θmin | θmax |
|---|---|---|---|---|---|---|---|
| 40 | 128 | 2 | 18 | 0.01 | 0.068 | 0 | 50 |
| Serial Number of Rings | Radius of Rings | Number of Sensors | Rotation Angle |
|---|---|---|---|
| 1 | 0.015 | 9 | 13.06 |
| 2 | 0.026 | 9 | 16.24 |
| 3 | 0.036 | 9 | 22.23 |
| 4 | 0.043 | 9 | 24.09 |
| 5 | 0.046 | 9 | 23.02 |
| 6 | 0.054 | 9 | 22.14 |
| 7 | 0.059 | 9 | 18.68 |
| 8 | 0.068 | 9 | 23.87 |
| Parameter | Original Array | Quasi-Improved Array | Improved Array | |
|---|---|---|---|---|
| DEA | ACA | |||
| MSL | −17.97 dB | −25.65 dB | −26.77 dB | −26.77 dB |
| MSL promotion | / | 42.74% | 48.97% | |
| Group | Group 1 | Group 2 | Group 3 | |
|---|---|---|---|---|
| Number of sound sources | 1, at fmin | 1, at fmax | 2 | |
| LF instrument | Frequency | 400 Hz | 7 kHz | 400 Hz–20 kHz |
| Sound pressure ratio | / | / | 1:0.8 | |
| HF instrument | Frequency | 5 kHz | 20 kHz | 400 Hz–20 kHz |
| Sound pressure ratio | / | / | 1:0.8 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, J.; Zha, X.; Pei, X.; Zhou, W. Topology Optimization Design Method for Acoustic Imaging Array of Power Equipment. Sensors 2024, 24, 2032. https://doi.org/10.3390/s24072032
Xiong J, Zha X, Pei X, Zhou W. Topology Optimization Design Method for Acoustic Imaging Array of Power Equipment. Sensors. 2024; 24(7):2032. https://doi.org/10.3390/s24072032
Chicago/Turabian StyleXiong, Jun, Xiaoming Zha, Xuekai Pei, and Wenjun Zhou. 2024. "Topology Optimization Design Method for Acoustic Imaging Array of Power Equipment" Sensors 24, no. 7: 2032. https://doi.org/10.3390/s24072032
APA StyleXiong, J., Zha, X., Pei, X., & Zhou, W. (2024). Topology Optimization Design Method for Acoustic Imaging Array of Power Equipment. Sensors, 24(7), 2032. https://doi.org/10.3390/s24072032