
KARATECH: A Practice Support System Using an Accelerometer to Reduce the Preliminary Actions of Karate

Abstract
1. Introduction
2. Related Work
2.1. Evaluation of Karate Movements Using Sensors
2.2. Motion Recognition Method Using the Inertial Sensor
2.3. Time Series Data Analysis with Automatic Segmentation
2.4. Detection of Motion Occurrence Timing
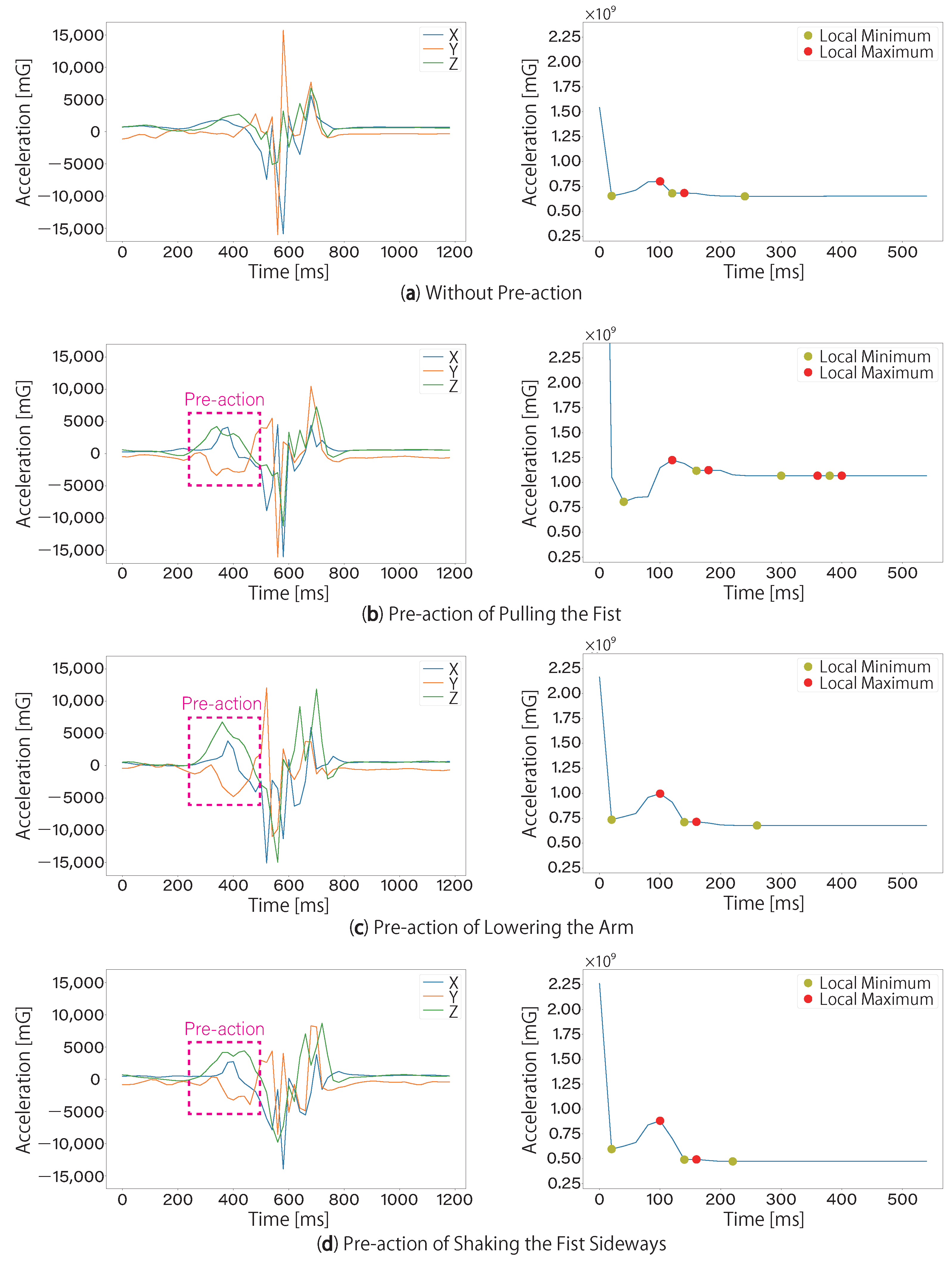
3. Pre-Action Estimation Method
3.1. Overview
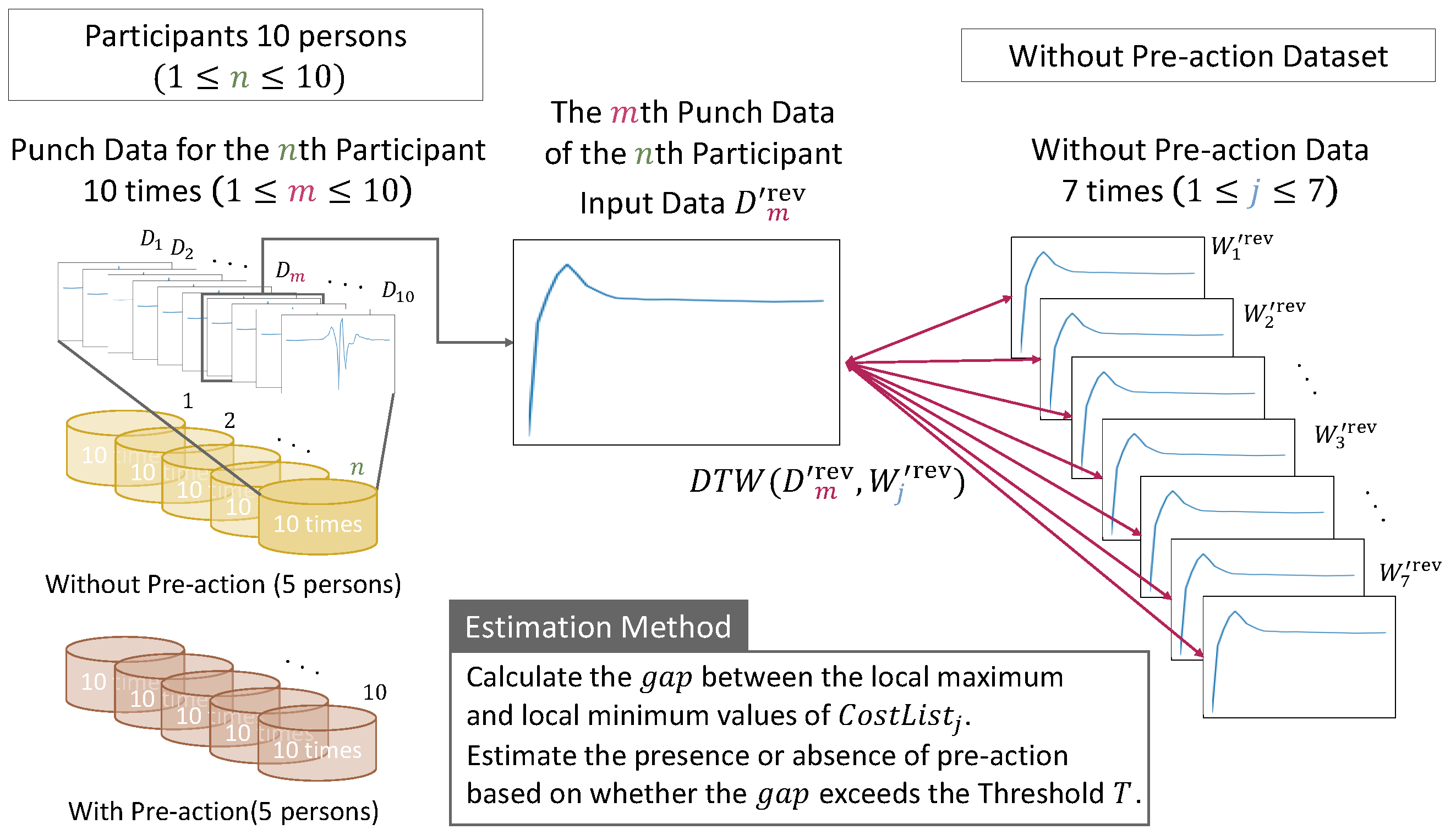
3.2. Dataset without Pre-Actions
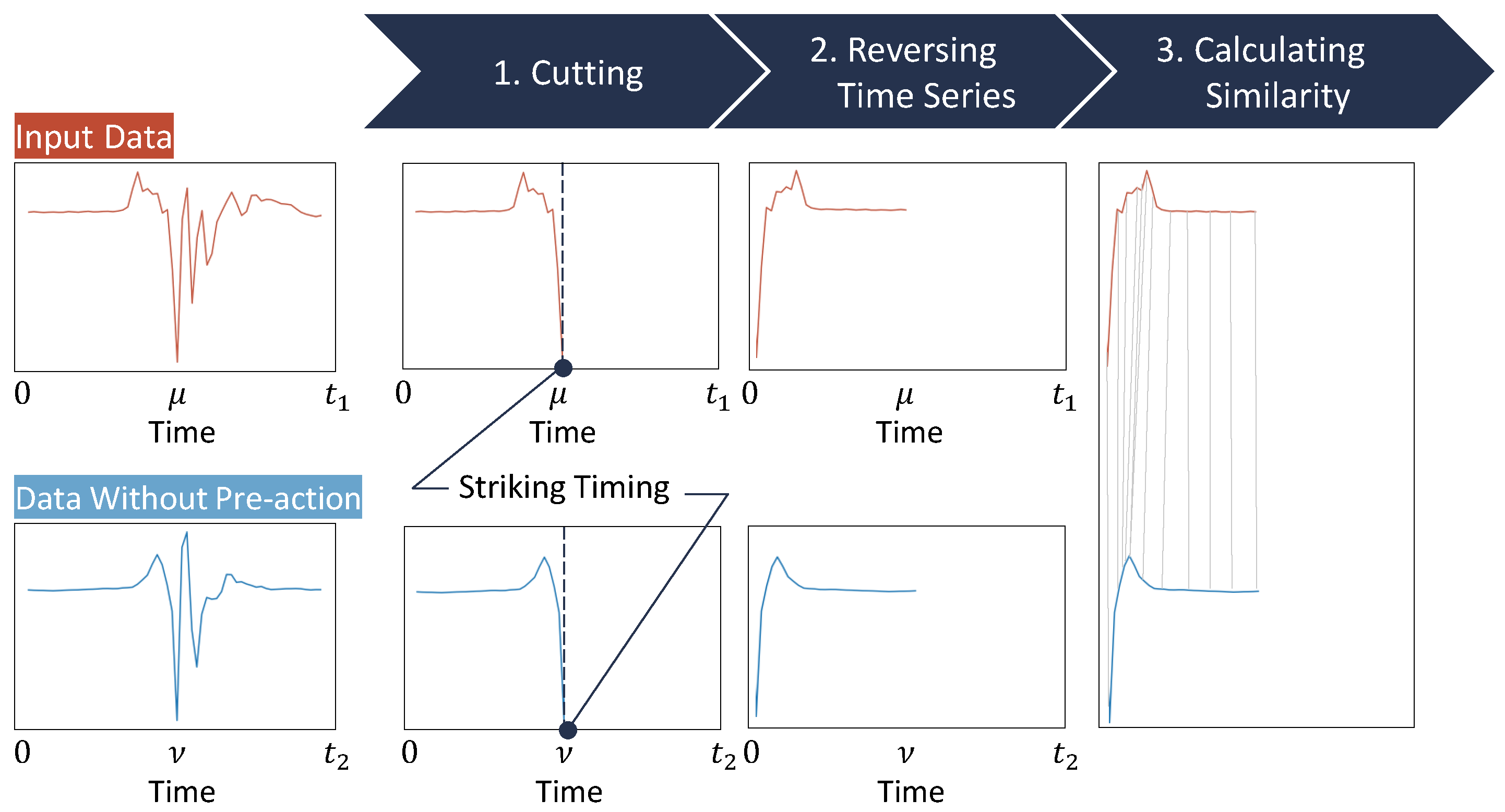
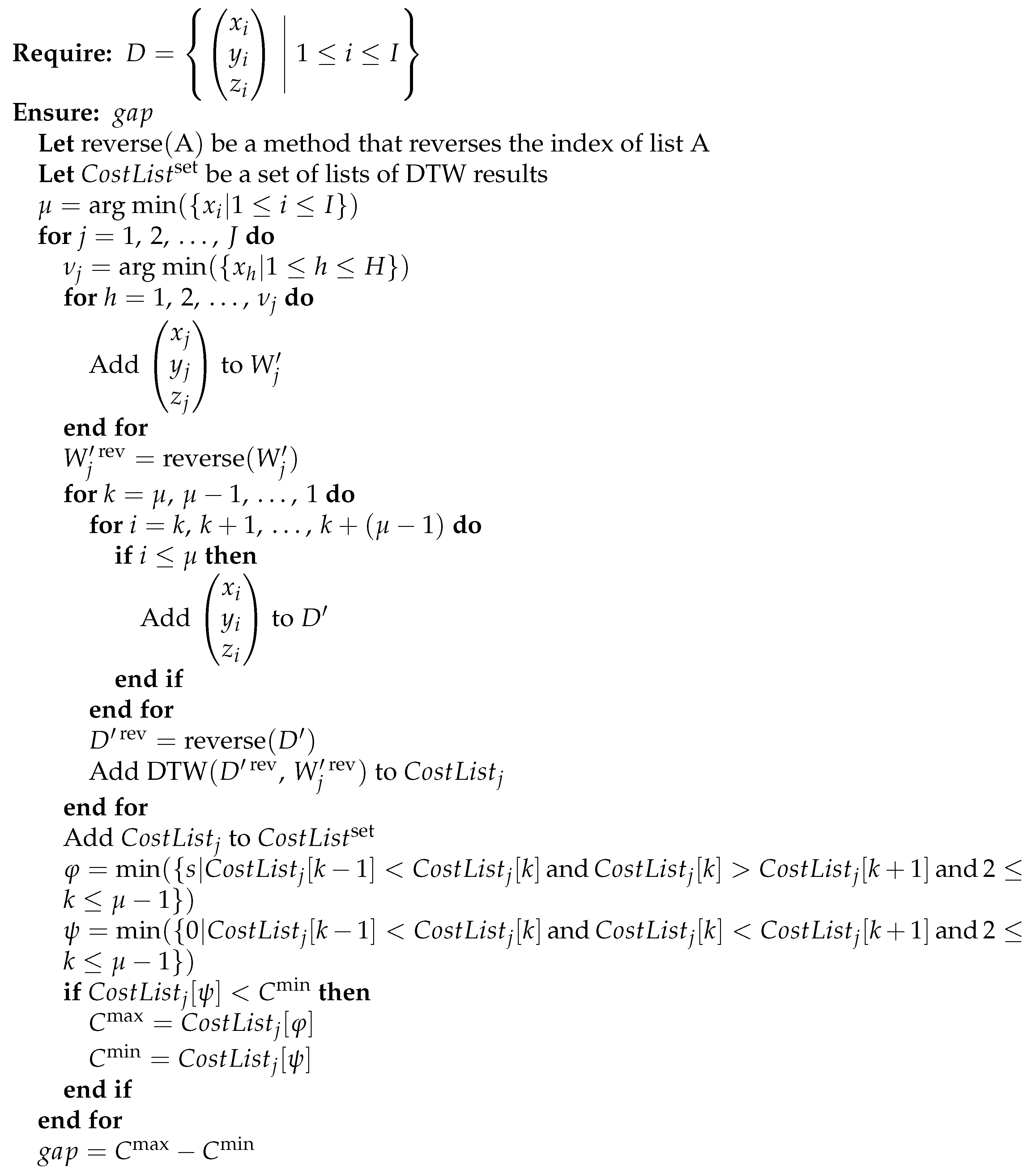
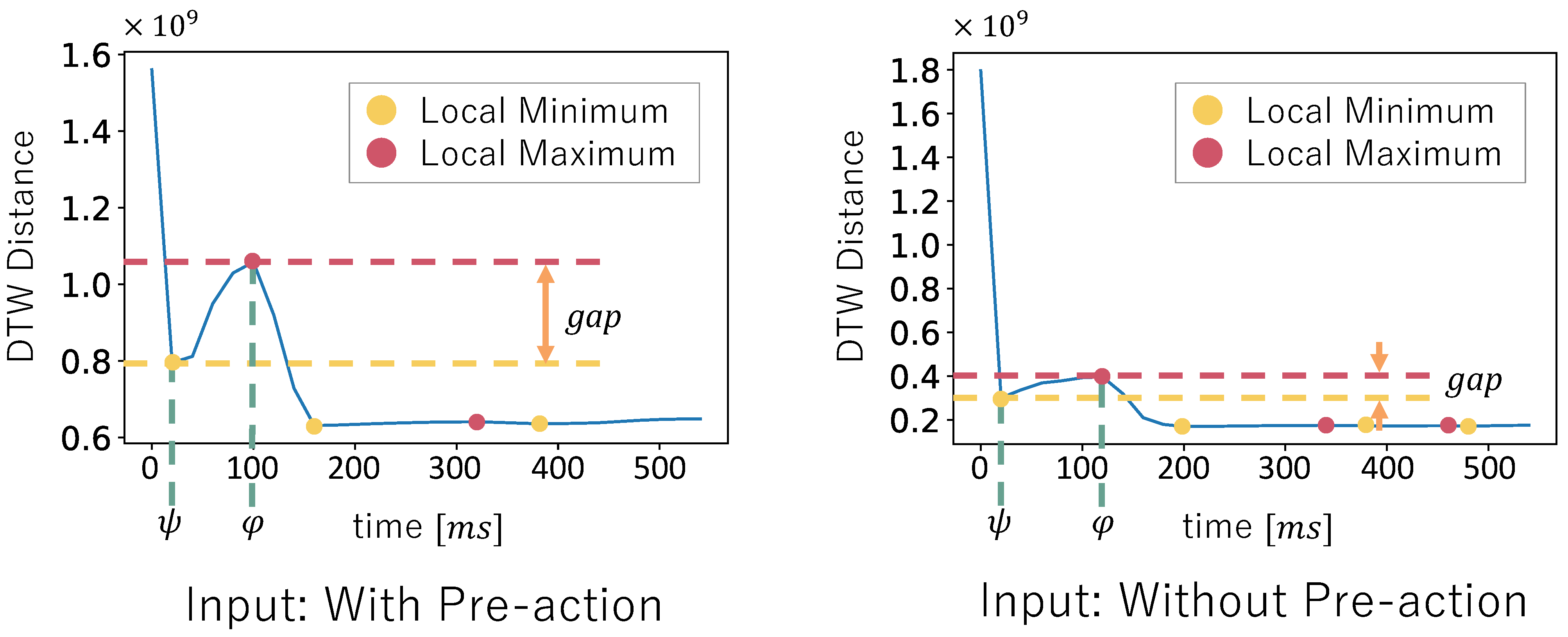
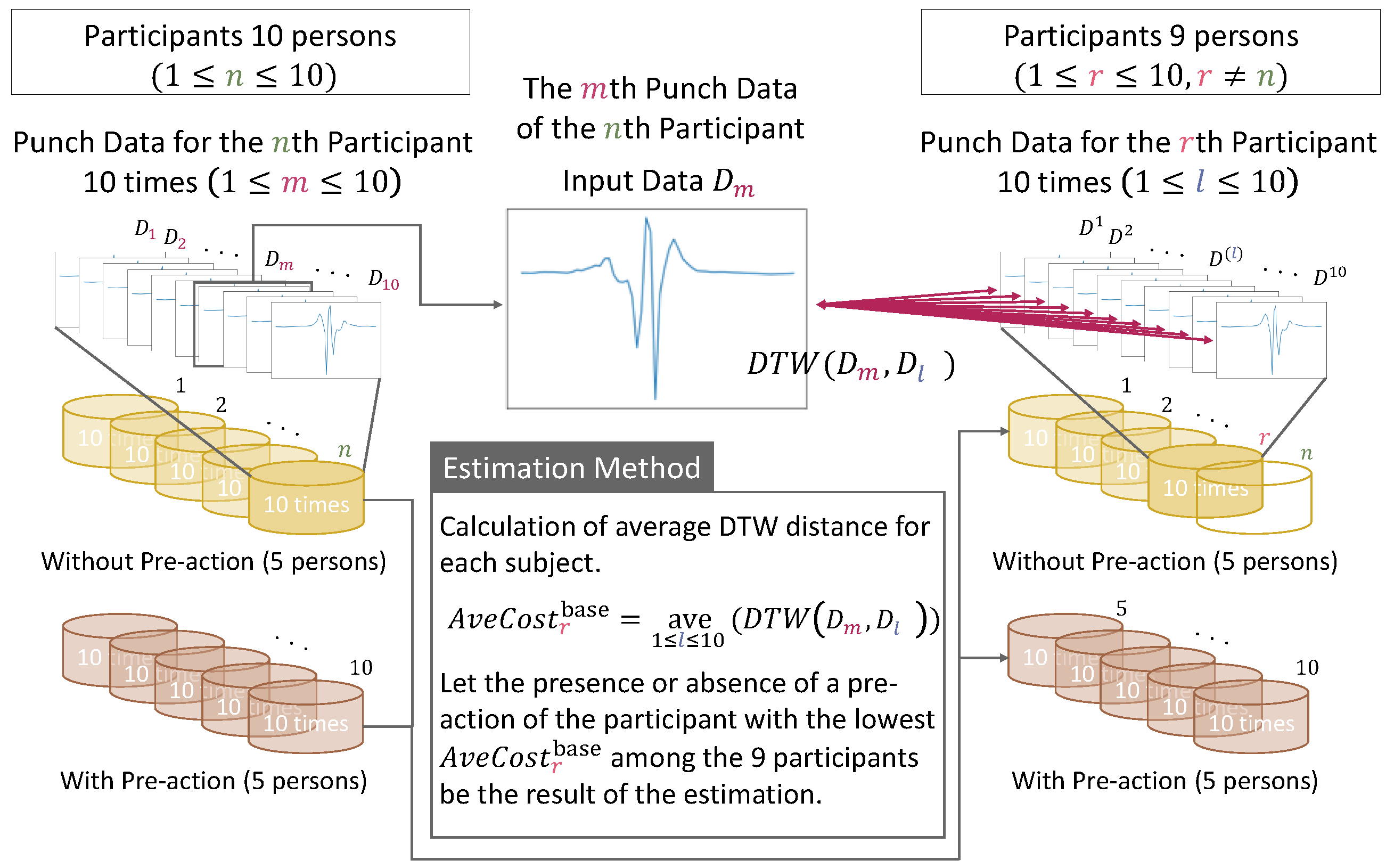
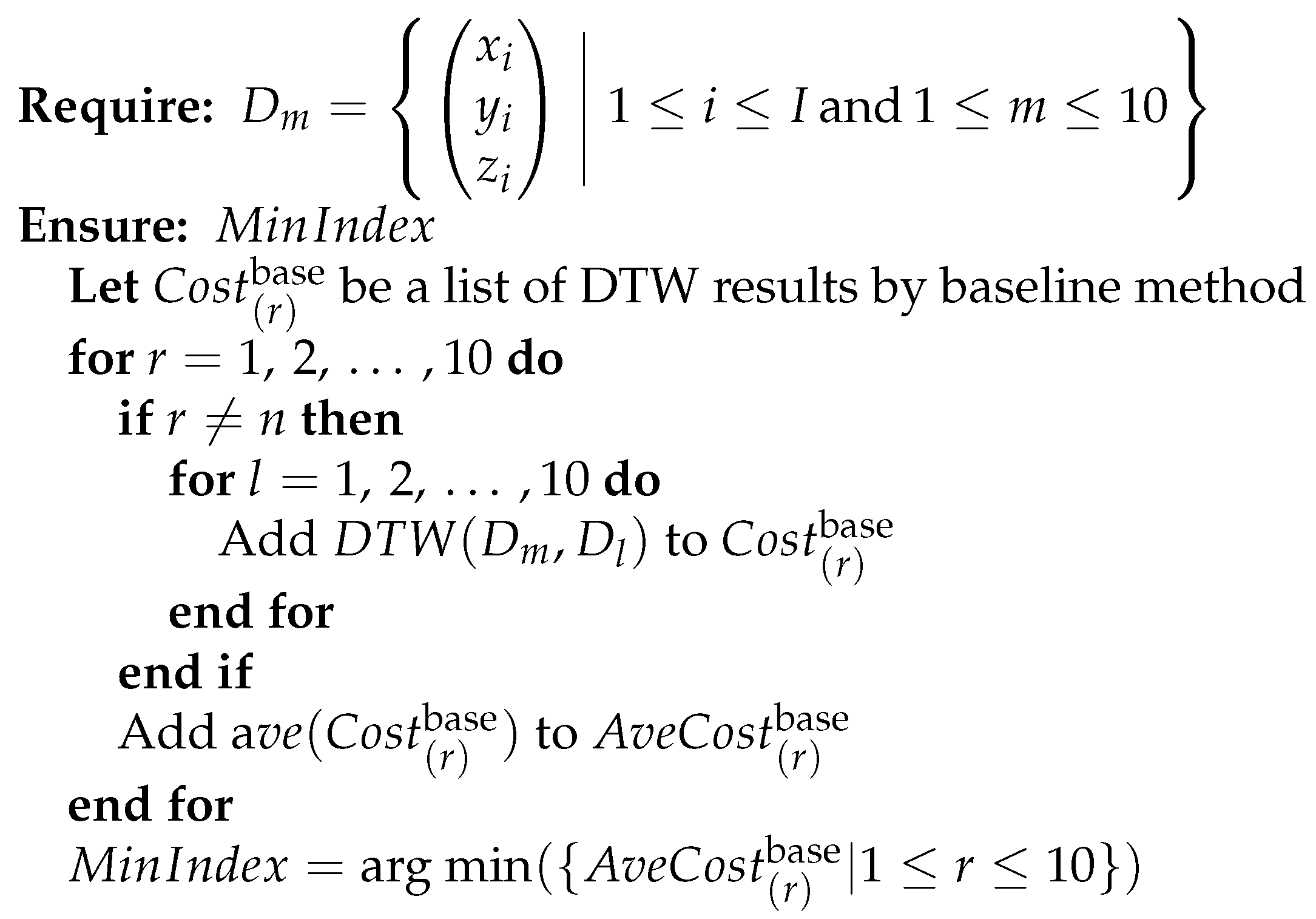
3.3. Estimation Method for the Presence or Absence of Pre-Actions
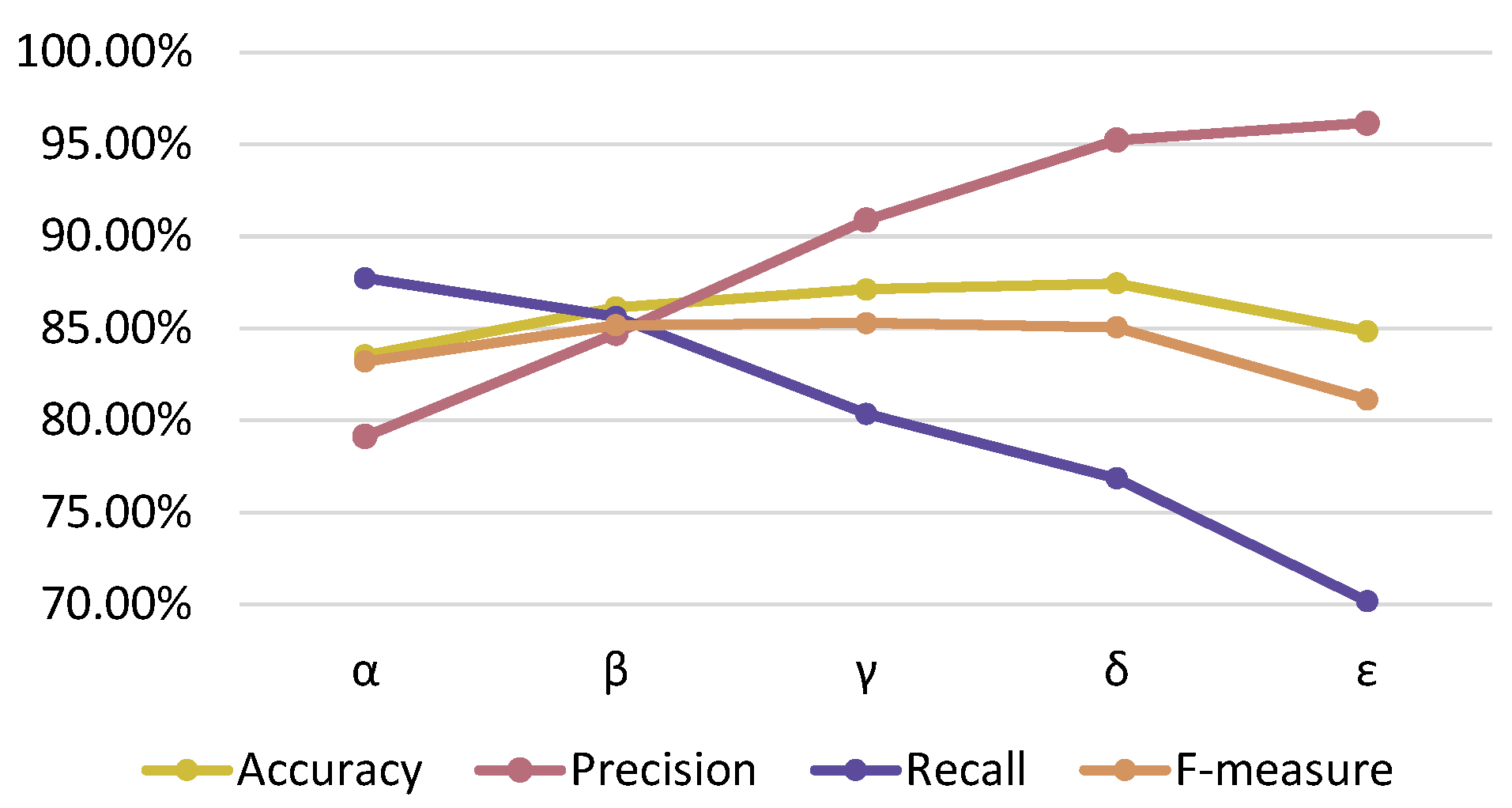
3.4. Experiments to Evaluate Estimation Accuracy
3.4.1. Experiment Details
3.4.2. Results and Discussion
4. Practice Support System
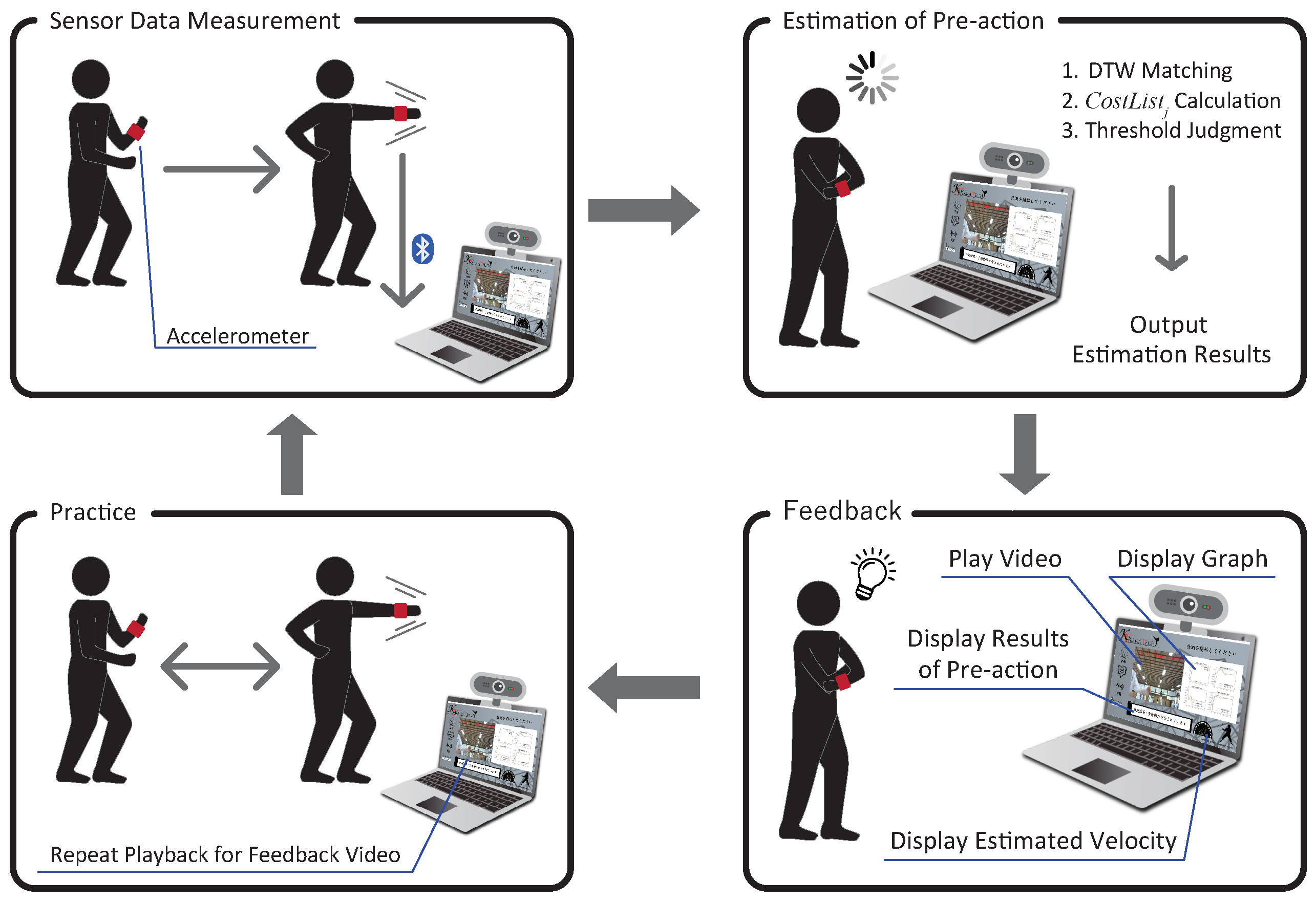
4.1. System Design
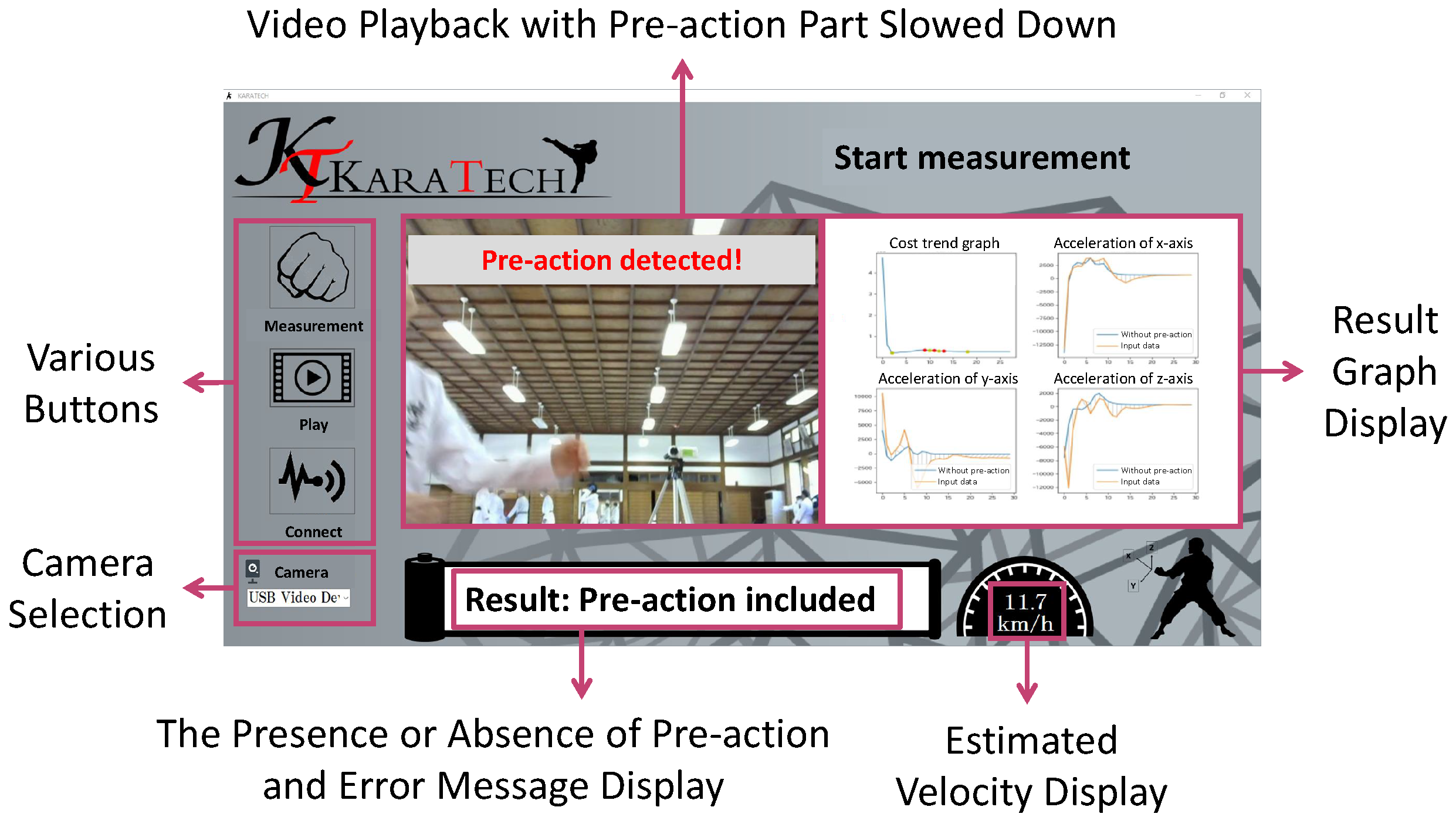
4.2. System Implementation
4.3. Usage Procedure
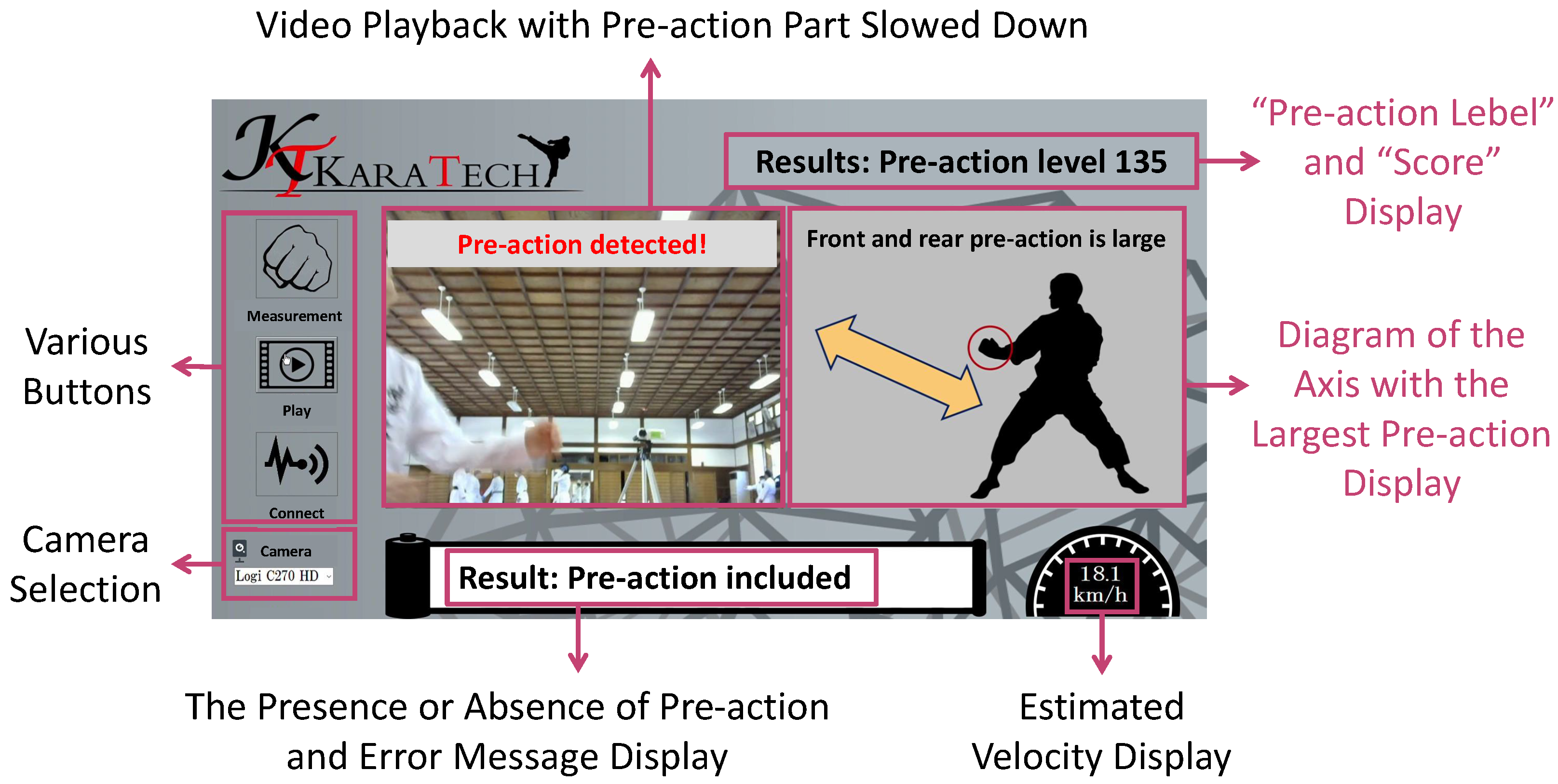
- Camera SelectionThe camera devices recognized by the PC are displayed in a pull-down list. The user selects the camera to be used.
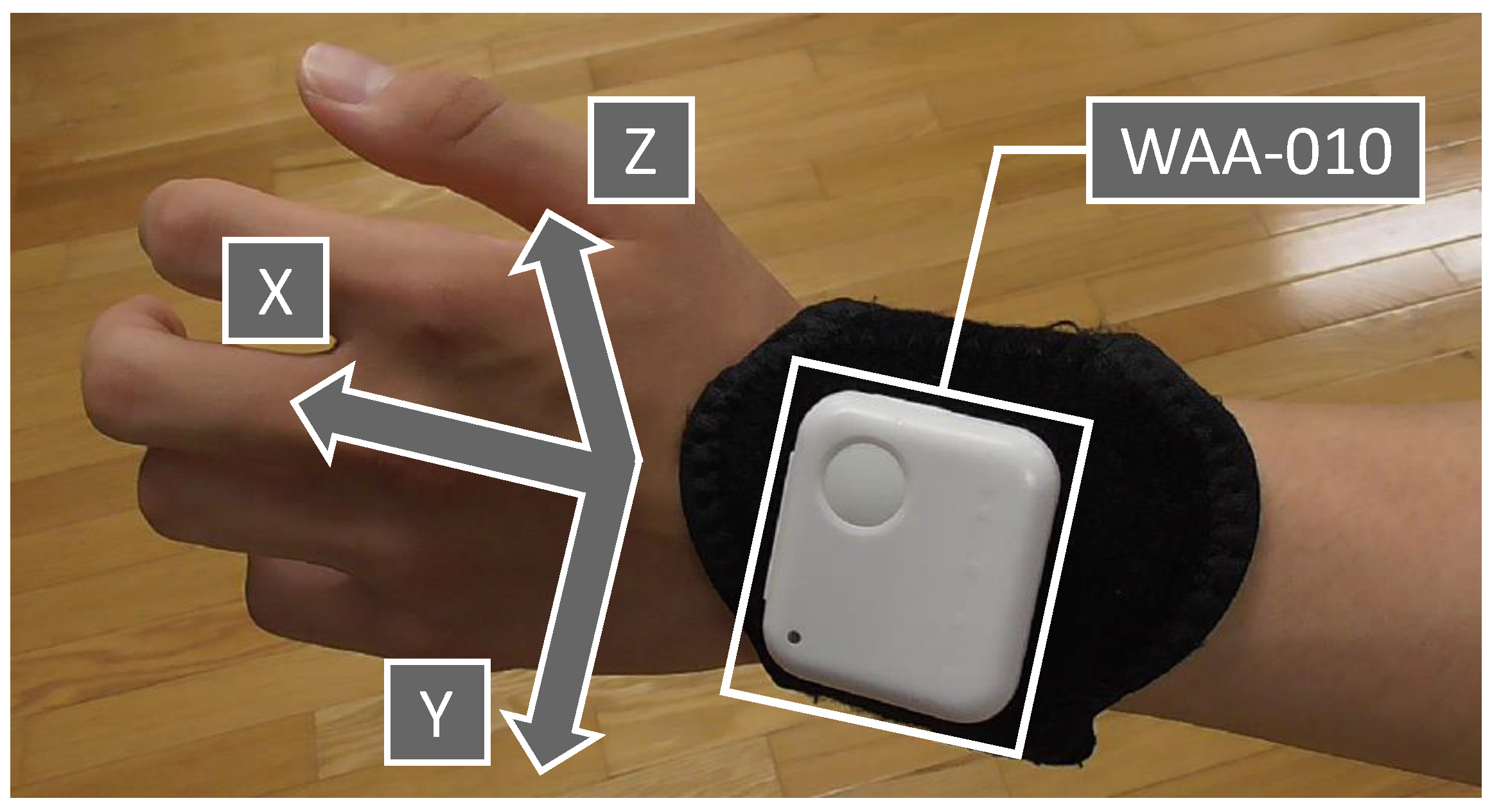
- Sensor ConnectionThe user clicks on the “Connect” button after wearing an accelerometer on the arm and turning on the power to connect the PC and the accelerometer. After that, the camera is activated, and the image is displayed on the screen.
- Motion MeasurementA five-second countdown begins after the user clicks the “Measure” button. During this time, the user performs a forefist punch in the camera position.
- Pre-action EstimationThe system estimates the presence or absence of pre-actions using the method described in Section 3.3 referring to the measured data.
- Measurement Results DisplayThe system displays the presence or absence of pre-actions, the video with the pre-action part slowed down, and the graph compared to the dataset without pre-actions after the user clicks the “Play” button. Furthermore, the system also displays the estimated velocity of the forefist punch, which the user can use as an indicator to maintain the accuracy of the forefist punch. The user can view the video repeatedly by pressing the “Play” button again.
- Repeat PracticeThe user clicks the “Measure” button again to practice the forefist punch, referring to the displayed results. By repeating the process from 3. Motion Measurement to 5. Measurement Results Display, the user can deepen their understanding of their pre-actions and practice more efficiently.
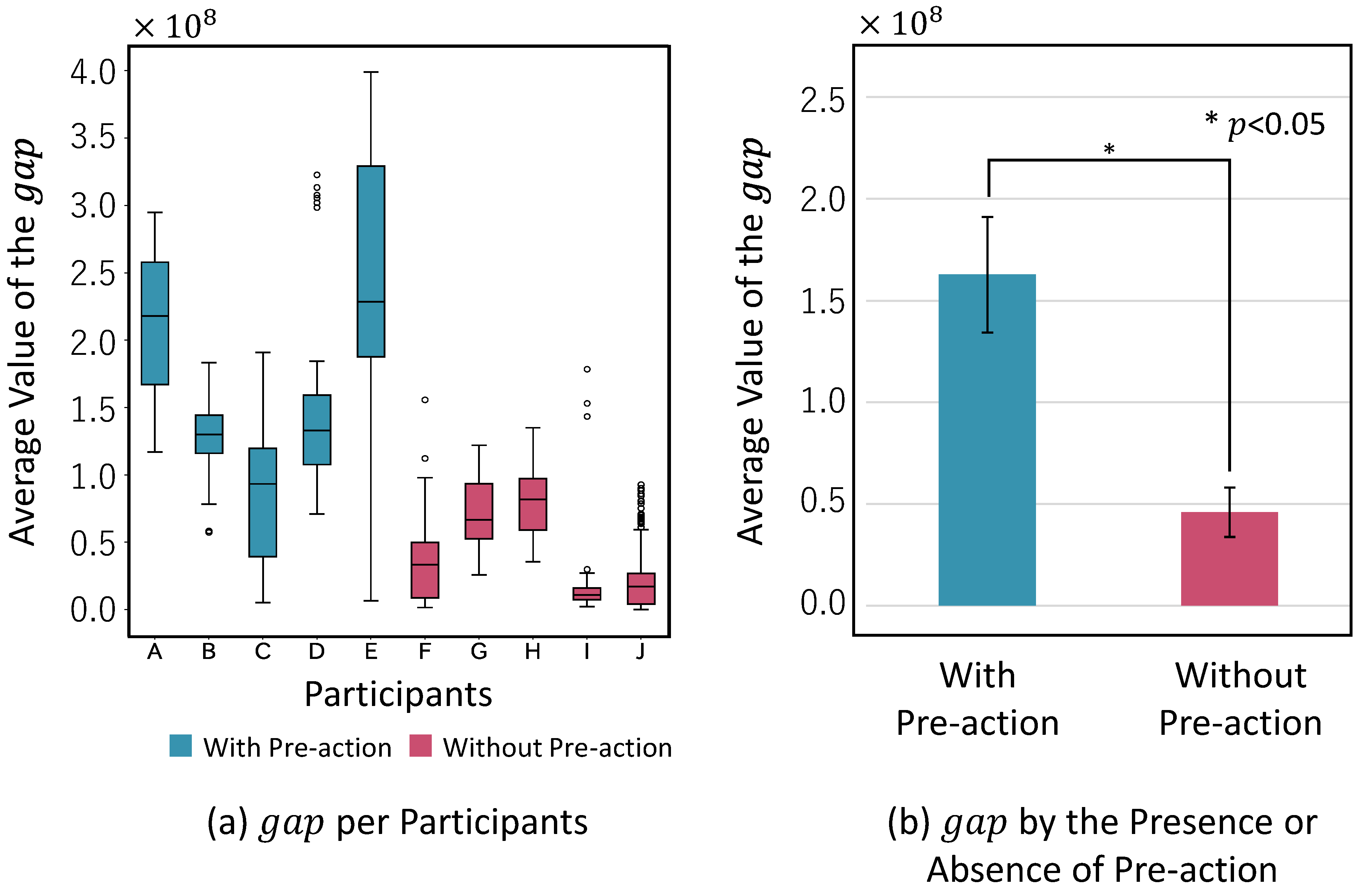
4.4. Experiments to Evaluate the Effectiveness of Pre-Action Reduction
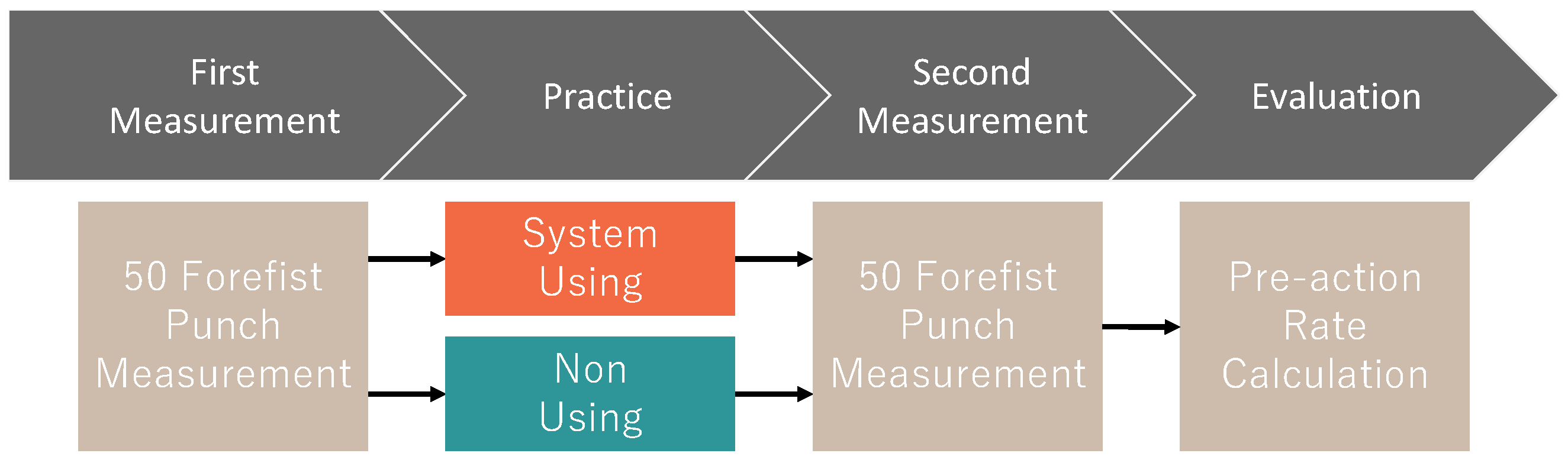
4.4.1. Short-Term Experiment
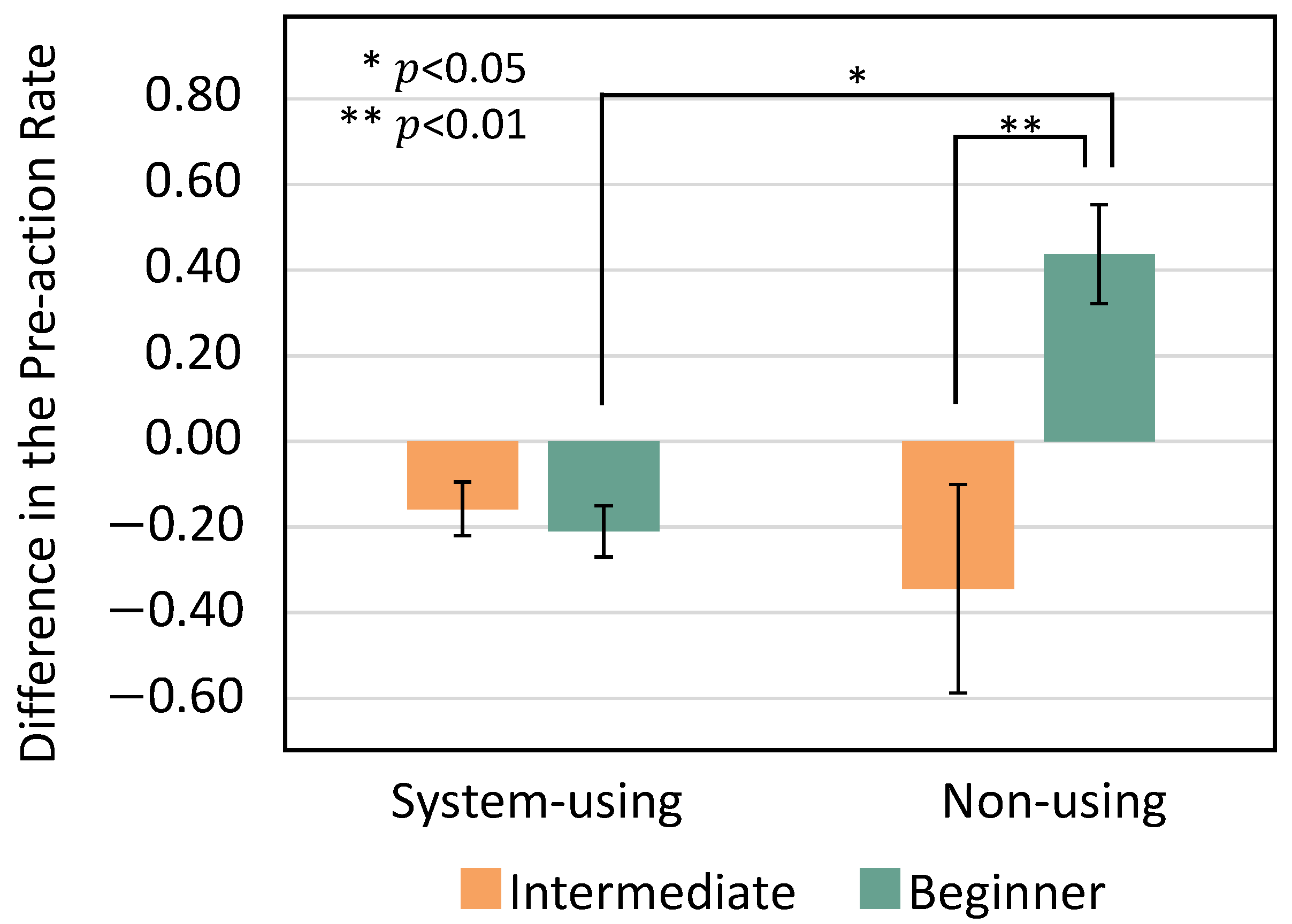
Results of Short-Term Experiment
Discussion of Short-Term Experiment
4.4.2. Functional Modifications to KARATECH
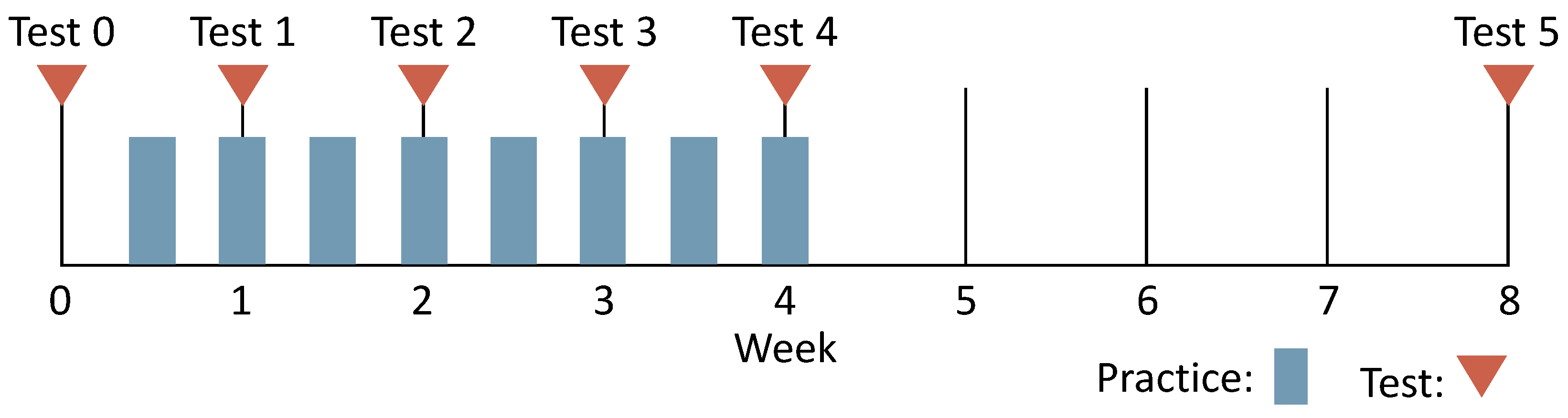
4.4.3. Long-Term Experiment
Results of Long-Term Experiment
Discussion of Long-Term Experimentsection
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Baum, L.E.; Petrie, T. Statistical Inference for Probabilistic Functions of Finite State Markov Chains. Ann. Math. Stat. 1966, 37, 1554–1563. [Google Scholar] [CrossRef]
- Myers, C.S.; Rabiner, L.R. A Comparative Study of Several Dynamic Time-Warping Algorithms for Connected Word Recognition. Bell Syst. Tech. J. 1981, 60, 1389–1409. [Google Scholar] [CrossRef]
- Jiang, W.; Yin, Z. Human Activity Recognition Using Wearable Sensors by deep Convolutional Neural Networks. In Proceedings of the 23rd ACM International Conference on Multimedia (MM 2015), New York, NY, USA, 26–30 October 2015; Association for Computing Machinery (ACM): New York, NY, USA; pp. 1307–1310. [Google Scholar]
- Maurer, U.; Smailagic, A.; Siewiorek, D.P.; Deisher, M. Activit Recognition and Monitoring Using Multiple Sensors on Different Body Positions. In Proceedings of the International Workshop on Wearable and Implantable Body Sensor Networks (BSN 2006), Cambridge, MA, USA, 3–5 April 2006; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA; pp. 113–116. [Google Scholar]
- Akl, A.; Valaee, S. Accelerometer-Based Gesture Recognition Via Dynamic-Time Warping, Affinity Propagation, & Compressive Sensing. In Proceedings of the 2010 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP 2010), Dallas, TX, USA, 15–19 March 2010; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2010; pp. 2270–2273. [Google Scholar]
- Masnad, M.; MukitHasan, G.M.; Iftekhar, K.M.; Rahman, M.S. Human Activity Recognition Using DTW Algorithm. In Proceedings of the 2019 IEEE Region 10 Symposium (TENSYMP 2019), Kolkata, India, 7–9 June 2019; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA; pp. 39–43. [Google Scholar]
- Hachaj, T.; Ogiela, M.R.; Piekarczyk, M.; Koptyra, K. Advanced Human Motion Analysis and Visualization: Comparison of Mawashi-geri Kick of Two Elite Karate Athletes. In Proceedings of the 2017 IEEE Symposium Series on Computational Intelligence (SSCI 2017), Honolulu, HI, USA, 27 November–1 December 2017; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA; pp. 1–7. [Google Scholar]
- Hachaj, T.; Ogiela, M.R.; Piekarczyk, M.; Koptyra, K. Human Action Analysis: Templates Generation, Matching and Visualization Applied to Motion Capture of Highly-Skilled Karate Athletes. Sensors 2017, 17, 2590. [Google Scholar] [CrossRef] [PubMed]
- Urribarri, D.; Larrea, M.; Castro, S.; Puppo, E. Visualization to Compare Karate Motion Captures. In Proceedings of the XXV Congreso Argentino de Ciencias de la Computación (CACIC 2019), Córdoba, Argentina, 14–18 October 2019; Universidad Nacional de Río Cuarto (UniRío) Editora: Córdoba, Argentina; pp. 446–455. [Google Scholar]
- Ait-Bennacer, F.E.; Aaroud, A.; Akodadi, K.; Cherradi, B. Applying Deep Learning and Computer Vision Techniques for an e-Sport and Smart Coaching System Using a Multiview Dataset: Case of Shotokan Karate. Int. J. Online Biomed. Eng. 2022, 18, 35–53. [Google Scholar] [CrossRef]
- Vencesbrito, A.M.; Ferreira, M.A.R.; Cortes, N.; Fernes, O.; Correia, P.P. Kinematic and Electromyographic Analyses of a Karate Punch. Electromyogr. Kinesiol. 2011, 21, 1023–1029. [Google Scholar] [CrossRef] [PubMed]
- Vuković, V.; Koropanovski, N.; Marković, S.; Kos, A.; Dopsaj, M.; Umek, A. Specific Test Design for the In-Depth Technique Analysis of Elite Karate Competitors with the Application of Kinematic Sensors. Appl. Sci. 2022, 12, 8048. [Google Scholar] [CrossRef]
- Yadav, S.K.; Deshmukh, A.; Gonela, R.V.; Kera, S.B.; Tiwari, K.; Pandey, H.M.; Akbar, S.A. MS-KARD: A Benchmark for Multimodal Karate Action Recognition. In Proceedings of the 2022 International Joint Conference on Neural Networks (IJCNN 2022), Padua, Italy, 18–23 July 2022; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA; pp. 1–8. [Google Scholar]
- Murao, K.; Terada, T.; Yano, A.; Matsukura, R. Evaluating Gesture Recognition by Multiple-Sensor-Containing Mobile Devices. In Proceedings of the 2011 15th Annual International Symposium on Wearable Computers (ISWC 2011), San Francisco, CA, USA, 12–15 June 2011; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA; pp. 55–58. [Google Scholar]
- Pernek, I.; Kurillo, G.; Stiglic, G.; Bajcsy, R. Recognizing the Intensity of Strength Training Exercises with Wearable Sensors. Biomed. Inform. 2015, 58, 145–155. [Google Scholar] [CrossRef] [PubMed]
- Junker, H.; Amft, O.; Lukowicz, P.; Troster, G. Gesture Spotting with Body-worn Inertial Sensors to Detect User Activities. Pattern Recognit. 2008, 41, 2010–2024. [Google Scholar] [CrossRef]
- Georgi, M.; Amma, C.; Schultz, T. Recognizing Hand and Finger Gestures with IMU Based Motion and EMG Based Muscle Activity Sensing. In Proceedings of the International Conference on Bio-Inspired Systems and Signal Processing (BIOSIGNALS 2015), Lisbon, Portugal, 12–15 January 2015; Science and Technology Events (SCITEVENTS): Setubal, Portugal; pp. 99–108. [Google Scholar]
- Gao, C.; Li, J.; Shen, W.; Yin, P. Two-dimensional dynamic time warping algorithm for matrices similarity. Intell. Data Anal. 2022, 26, 859–871. [Google Scholar] [CrossRef]
- Xu, H.; Feng, R.; Zhang, W. C-DTW for Human Action Recognition Based on Nanogenerator. Sensors 2023, 23, 7230. [Google Scholar] [CrossRef] [PubMed]
- Guo, F.; Zou, F.; Luo, S.; Liao, L.; Wu, J.; Yu, X.; Zhang, C. The Fast Detection of Abnormal ETC Data Based on an Improved DTW Algorithm. Electronics 2022, 11, 1981. [Google Scholar] [CrossRef]
- Darkhovsky, B.S.; Piryatinska, A. New Approach to the Segmentation Problem for Time Series of Arbitrary Nature. Proc. Steklov Inst. Math. 2014, 287, 54–67. [Google Scholar] [CrossRef]
- Inoue, S.; Hattori, Y. Towoard High-level Activity Recognition from Accelerometers on Mobile Phones. In Proceedings of the 2011 IEEE International Conferences on Internet of Things, and Cyber, Physical and Social Computing (CPSCom 2011), Dalian, China, 19–22 October 2011; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA; pp. 225–231. [Google Scholar]
- Vögele, A.; Krüger, B.; Klein, R. Efficient unsupervised temporal segmentation of human motion. In Proceedings of the 2014 the ACM SIGGRAPH/Eurographics Symposium on Computer Animation(SCA 2014), Copenhagen, Denmark, 21–23 July 2014; Association for Computing Machinery (ACM): New York, NY, USA; pp. 167–176. [Google Scholar]
- Wang, P.; Lau, R.W.H.; Pan, Z.; Wang, J.; Song, H. An Eigen-based Motion Retrieval Method for Real-time Animation. Comput. Graph. 2014, 38, 255–267. [Google Scholar] [CrossRef]
- Wang, P.; Wang, H.; Wang, W. Finding Semantics Intime Series. In Proceedings of the 2011 ACM SIGMOD International Conference on Management of Data (SIGMOD 2011), Athens, Greece, 12–16 June 2011; Association for Computing Machinery (ACM): New York, NY, USA; pp. 385–396. [Google Scholar]
- Yao, S.; Hu, S.; Zhao, Y.; Zhang, A.; Abdelzaher, T. Deepsense: A UnifiedDdeep Learning Framework for Timeseries Mobile Sensing Data Processing. In Proceedings of the 26th International Conference on World Wide Web Companion (WWW 2017), Perth, Australia, 3–7 April 2017; Association for Computing Machinery (ACM): New York, NY, USA; pp. 351–360. [Google Scholar]
- Sideridis, V.; Zacharakis, A.; Tzagkarakis, G.; Papadopouli, M. GestureKeeper: Gesture Recognition for Controlling Devices in IoT Environments. In Proceedings of the 2019 27th European Signal Processing Conference (EUSIPCO 2019), A Coruña, Spain, 2–6 September 2019; The European Association for Signal Processing (EURASIP). pp. 1–5. [Google Scholar]
- Yamada, H.; Murao, K.; Terada, T.; Tsukamoto, M. A Method for Determining the Moment of Touching a Card Using Wrist-worn Sensor in Competitive Karuta. Inf. Process. 2018, 26, 38–47. [Google Scholar] [CrossRef]
- Murao, K.; Yamada, H.; Terada, T.; Tsukamoto, M. Estimating Timing of Specific Motion in a Gesture Movement with a Wearable Sensor. Sens. Mater. 2021, 33, 109–126. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pattern | Threshold |
|---|---|
| Baseline Method | Proposed Method | |
|---|---|---|
| Accuracy | 46.0% | 86.1% |
| Precision | 46.4% | 84.7% |
| Recall | 52.0% | 85.6% |
| F-measure | 49.1% | 85.2% |
| Participants | Group | Proficiency | Before | After |
|---|---|---|---|---|
| A | System-using | Intermediate | 12.11 | 9.28 |
| B | Intermediate | 9.92 | 10.31 | |
| C | Beginner | 13.30 | 14.39 | |
| D | Beginner | 10.29 | 13.00 | |
| E | Beginner | 13.21 | 12.28 | |
| F | Beginner | 6.28 | 10.92 | |
| G | Non-using | Intermediate | 12.89 | 14.43 |
| H | Intermediate | 11.31 | 10.51 | |
| I | Beginner | 11.38 | 12.32 | |
| J | Beginner | 10.66 | 11.99 | |
| K | Beginner | 11.24 | 11.57 | |
| L | Beginner | 8.75 | 10.85 |
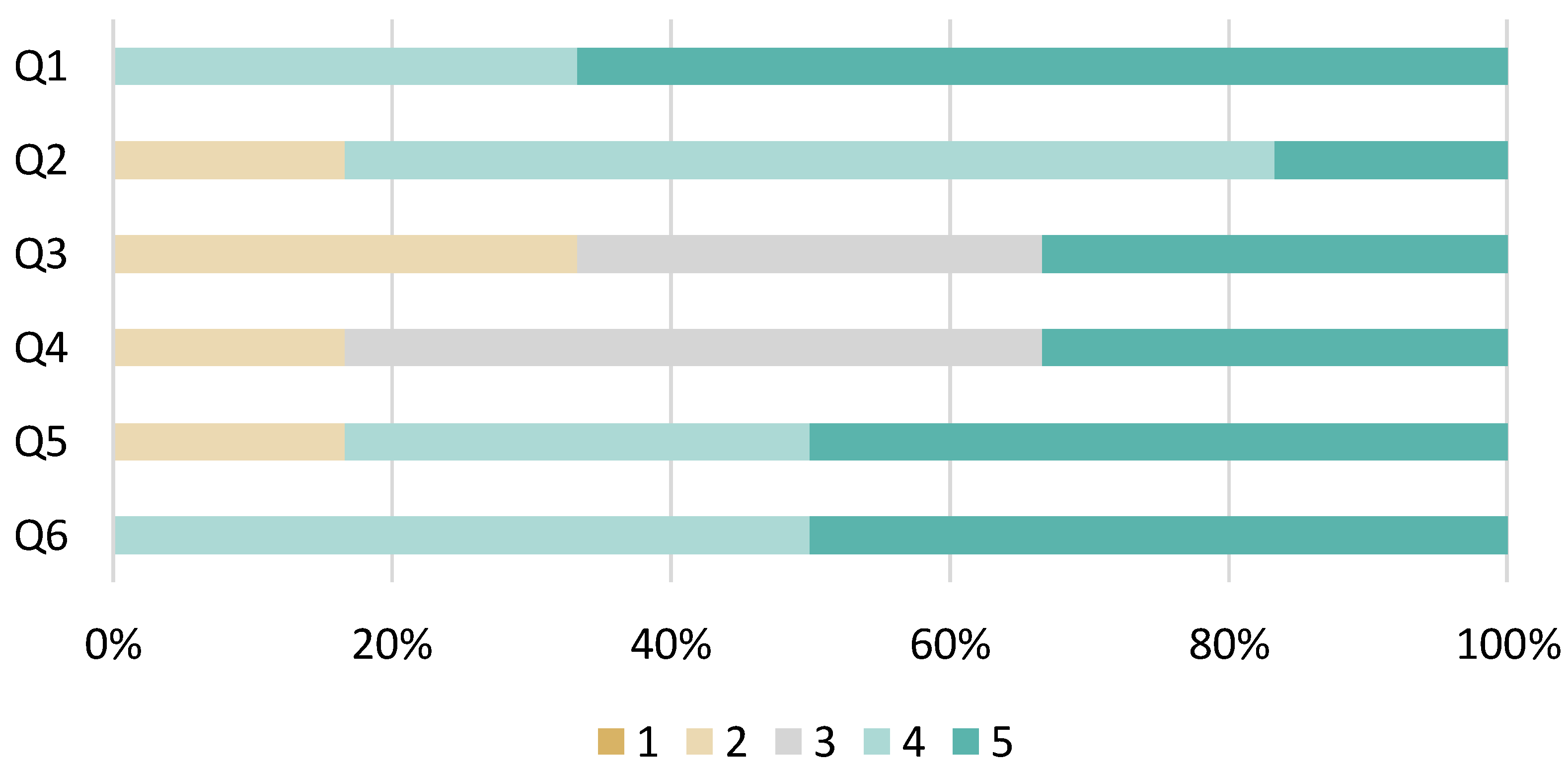
| No. | Question |
|---|---|
| Q1 | Was it easy to understand how to use the system? |
| Q2 | Was the video feedback easy to understand? |
| Q3 | Was the graphical feedback easy to understand? |
| Q4 | Was the feedback by score easy to understand? |
| Q5 | Was the feedback by velocity easy to understand? |
| Q6 | Did you feel that it helped you practice reducing pre-action? |
| Participants | Group | Proficiency | Test 0 | Test 1 | Test 2 | Test 3 | Test 4 | Test 5 |
|---|---|---|---|---|---|---|---|---|
| LA | System-using | Intermediate | −0.153 | −0.220 | −0.187 | −0.293 | −0.187 | −0.227 |
| LB | Intermediate | −0.147 | −0.107 | −0.100 | −0.067 | −0.040 | −0.013 | |
| LC | Beginner | −0.080 | −0.093 | 0.067 | 0.073 | 0.073 | 0.040 | |
| LD | Beginner | 0.400 | 0.647 | 0.387 | 0.560 | 0.067 | 0.207 | |
| LE | Beginner | 0.427 | 0.093 | −0.033 | 0.027 | 0.020 | 0.073 | |
| LF | Beginner | −0.487 | −0.020 | −0.027 | −0.027 | 0.013 | −0.027 | |
| LG | Non-using | Intermediate | 0.193 | 0.180 | 0.033 | 0.033 | −0.367 | −0.013 |
| LH | Intermediate | −0.067 | −0.027 | −0.047 | 0.013 | 0.000 | −0.007 | |
| LI | Intermediate | 0.098 | 0.213 | 0.127 | 0.140 | 0.293 | 0.107 | |
| LJ | Beginner | 0.240 | 0.693 | 0.253 | 0.013 | 0.547 | 0.027 | |
| LK | Beginner | −0.353 | −0.115 | 0.107 | 0.120 | 0.280 | 0.067 | |
| LM | Beginner | −0.360 | −0.067 | −0.040 | 0.013 | −0.047 | −0.060 | |
| LN | Beginner | 0.167 | 0.280 | 0.376 | 0.400 | 0.507 | 0.453 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, K.; Tsuchida, S.; Terada, T.; Tsukamoto, M. KARATECH: A Practice Support System Using an Accelerometer to Reduce the Preliminary Actions of Karate. Sensors 2024, 24, 2306. https://doi.org/10.3390/s24072306
Kim K, Tsuchida S, Terada T, Tsukamoto M. KARATECH: A Practice Support System Using an Accelerometer to Reduce the Preliminary Actions of Karate. Sensors. 2024; 24(7):2306. https://doi.org/10.3390/s24072306
Chicago/Turabian StyleKim, Kwangyun, Shuhei Tsuchida, Tsutomu Terada, and Masahiko Tsukamoto. 2024. "KARATECH: A Practice Support System Using an Accelerometer to Reduce the Preliminary Actions of Karate" Sensors 24, no. 7: 2306. https://doi.org/10.3390/s24072306
APA StyleKim, K., Tsuchida, S., Terada, T., & Tsukamoto, M. (2024). KARATECH: A Practice Support System Using an Accelerometer to Reduce the Preliminary Actions of Karate. Sensors, 24(7), 2306. https://doi.org/10.3390/s24072306