
A Two-Step Regional Ionospheric Modeling Approach for PPP-RTK



Abstract
1. Introduction
2. Regional Ionospheric Modeling Approach
2.1. Slant Ionospheric Delay Extraction
2.2. Two-Step Regional Ionospheric Modeling
3. PPP Processing Strategy
4. Results and Analysis
4.1. Data Description
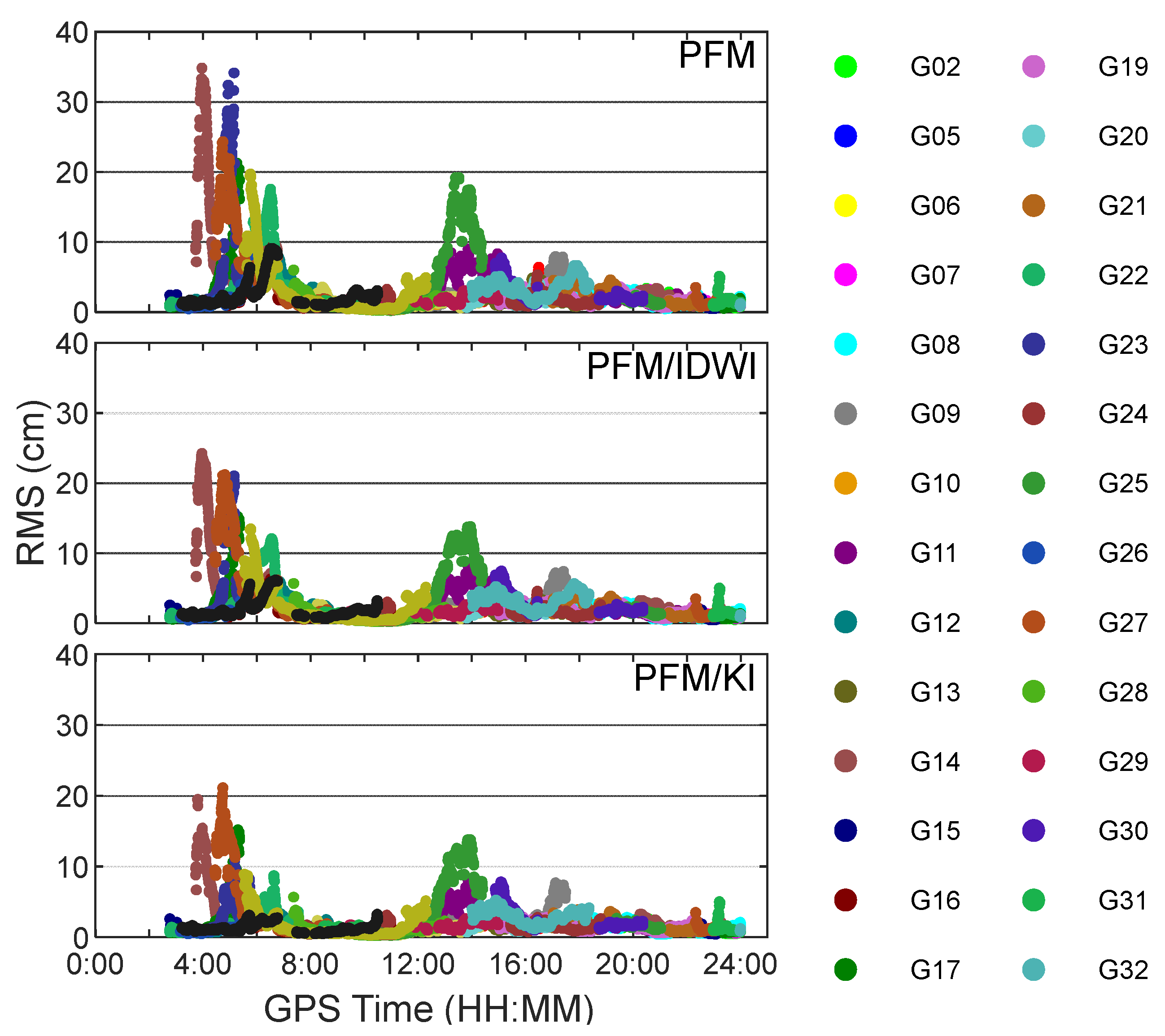
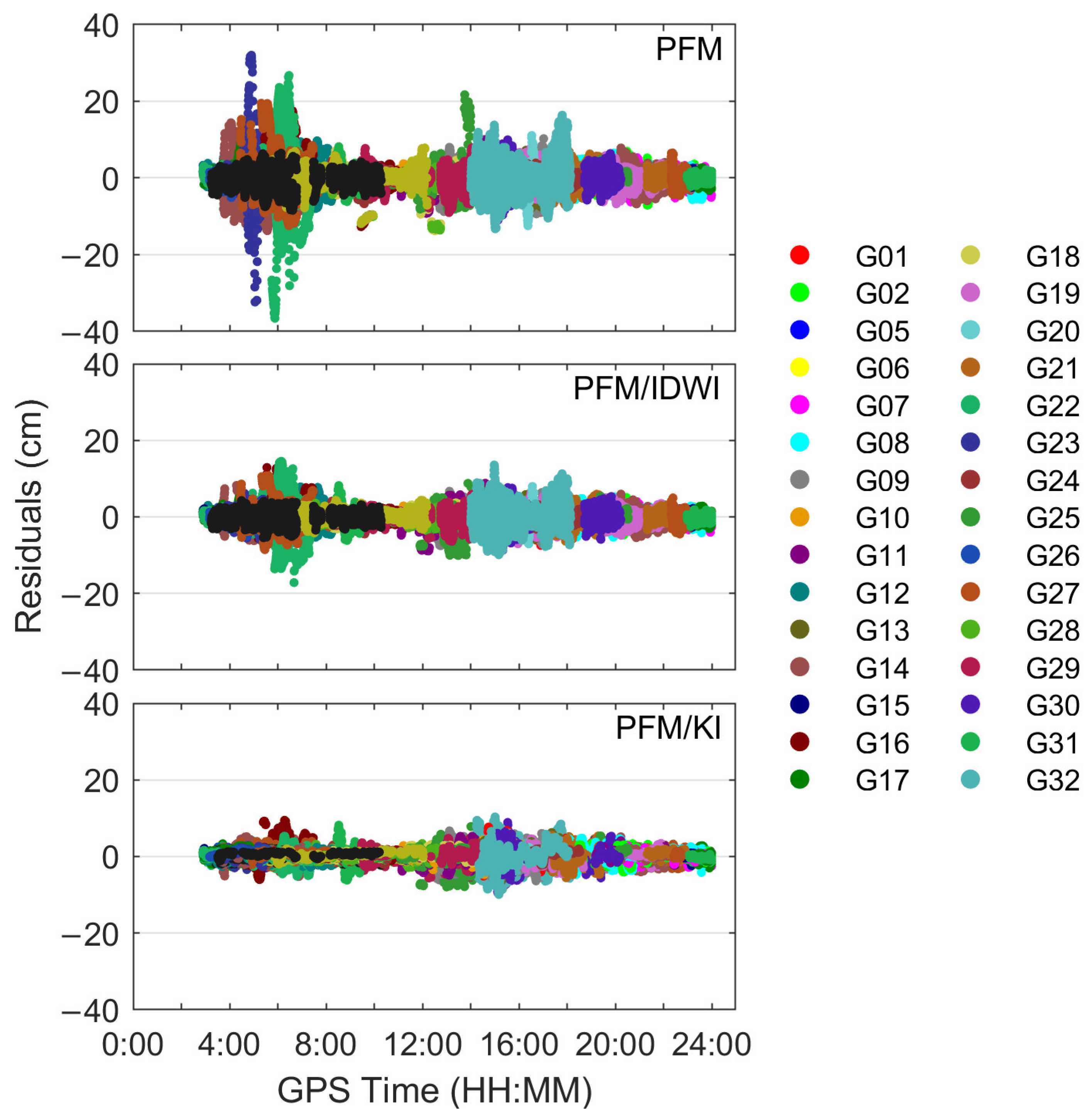
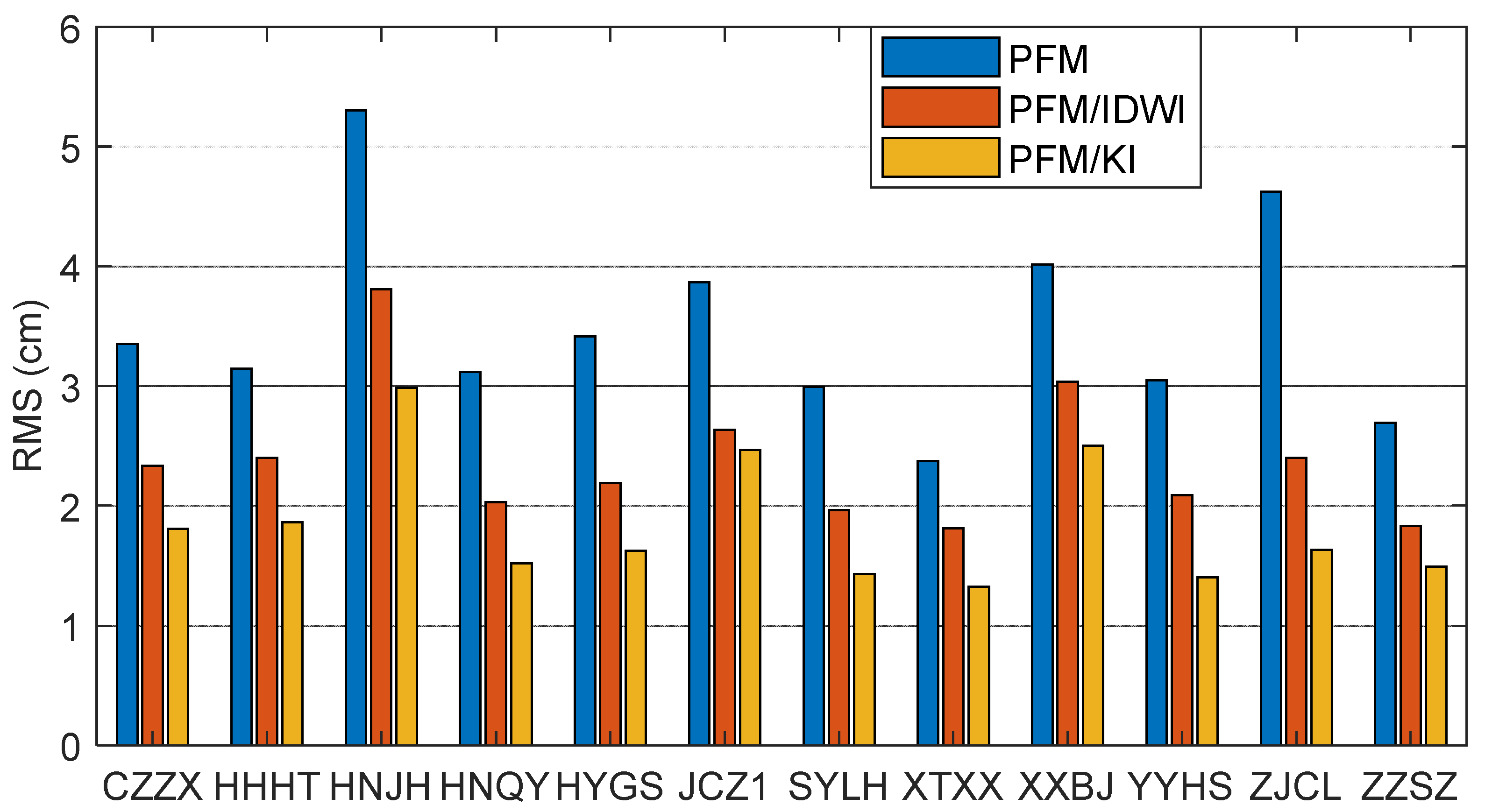
4.2. Ionospheric Model Accuracy
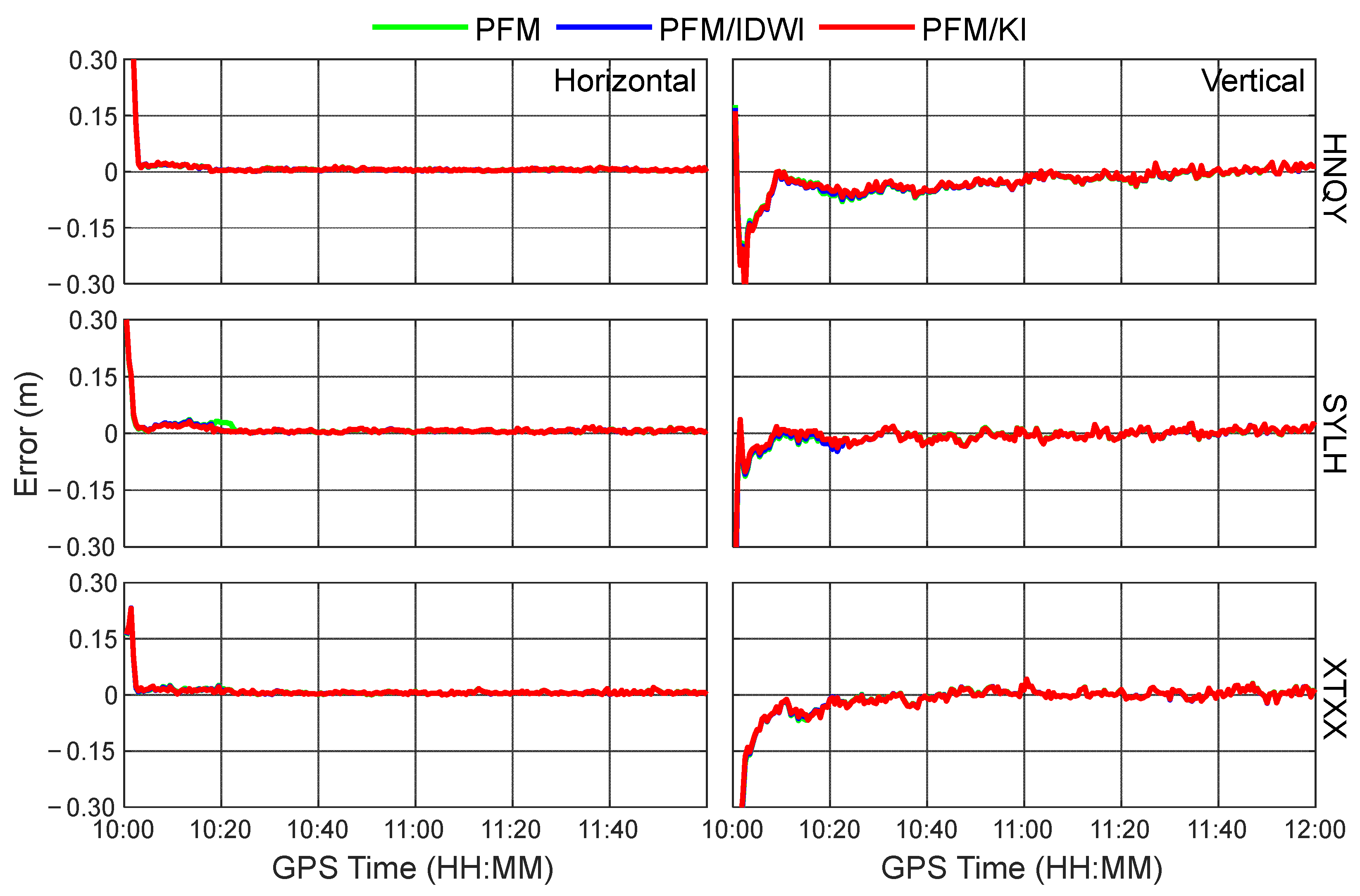
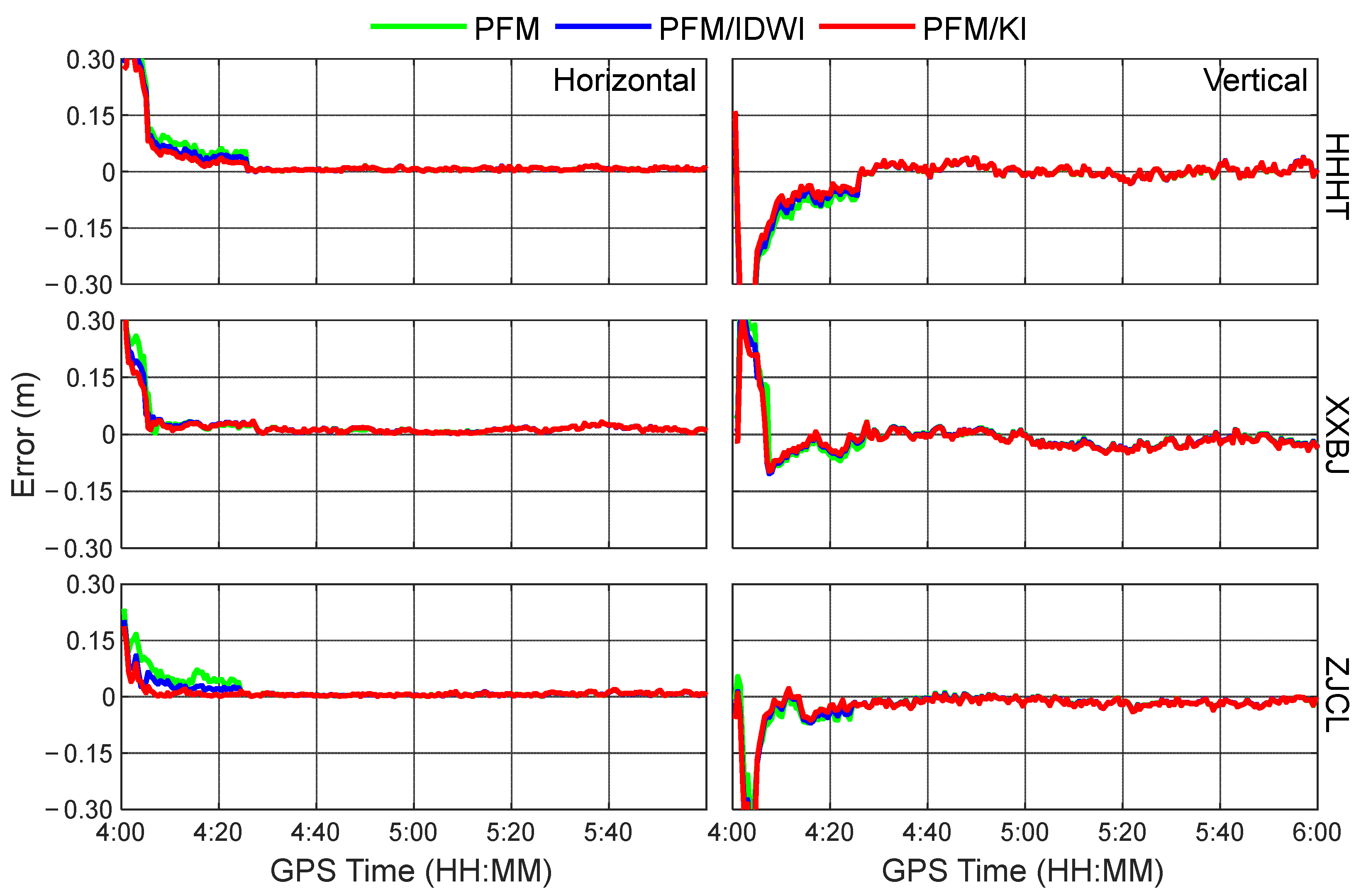
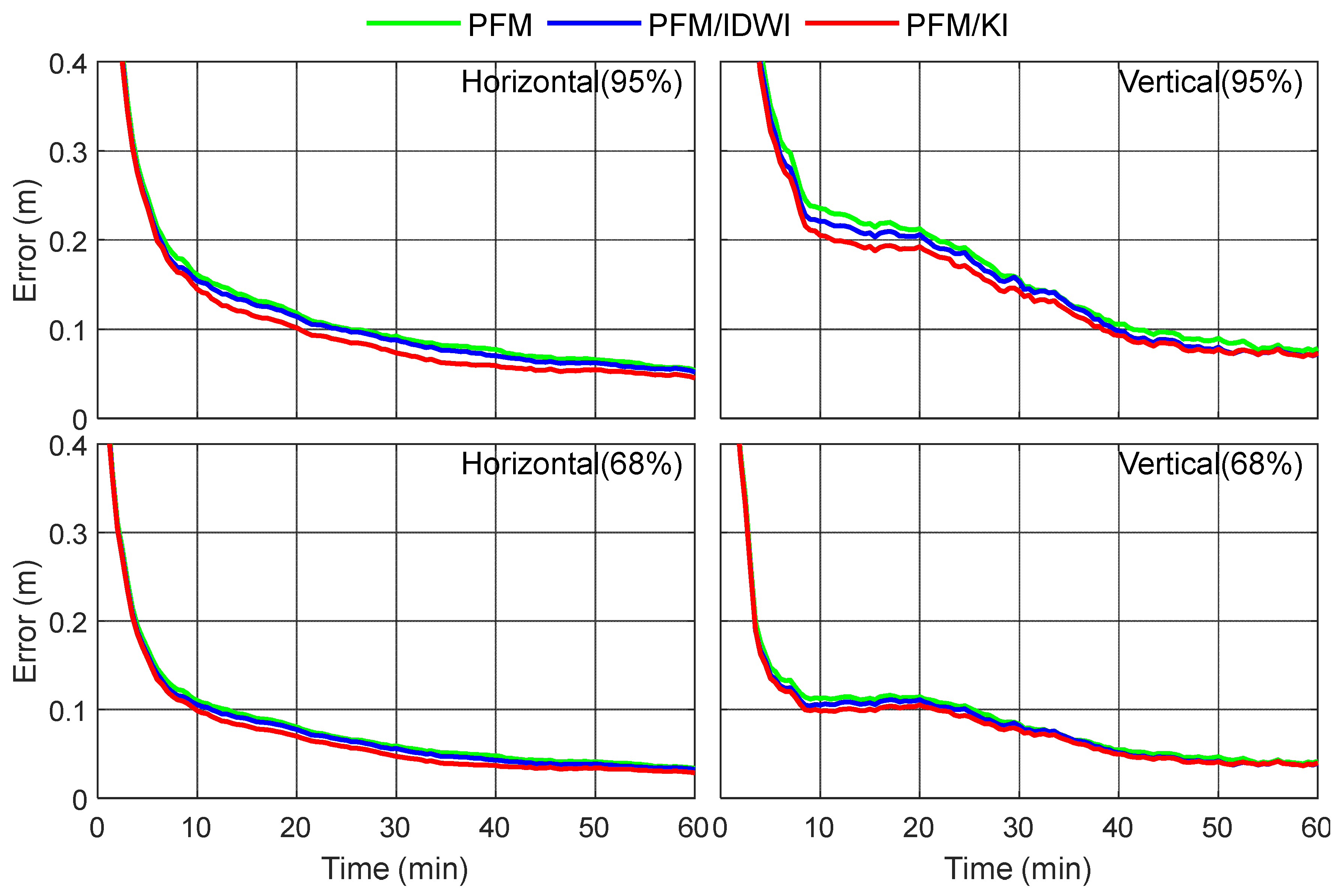
4.3. PPP-RTK Performance Assessment
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise Point Positioning Using IGS Orbit and Clock Products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Banville, S.; Collins, P.; Zhang, W.; Langley, R.B. Global and regional ionospheric corrections for faster PPP convergence. Navigation 2014, 61, 115–124. [Google Scholar] [CrossRef]
- Bahadur, B.; Nohutcu, M. Comparative analysis of MGEX products for post-processing multi-GNSS PPP. Measurement 2019, 145, 361–369. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Wübbena, G.; Schmitz, M.; Bagge, A. PPP-RTK: Precise Point Positioning Using State-Space Representation in RTK Networks. In Proceedings of the ION GNSS 18th International Technical Meeting of the Satellite Division, Long Beach, CA, USA, 13–16 September 2005. [Google Scholar]
- Teunissen, P.J.G.; Khodabandeh, A. Review and principles of PPP-RTK methods. J. Geod. 2015, 89, 217–240. [Google Scholar] [CrossRef]
- Li, X.; Huang, J.; Li, X.; Shen, Z.; Han, J.; Li, L.; Wang, B. Review of PPP–RTK: Achievements, challenges, and opportunities. Satell. Navig. 2022, 3, 28. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Zhang, H.; Wickert, J. A method for improving uncalibrated phase delay estimation and ambiguity-fixing in real-time precise point positioning. J. Geod. 2013, 87, 405–416. [Google Scholar] [CrossRef]
- Gu, S.; Shi, C.; Lou, Y.; Liu, J. Ionospheric effects in uncalibrated phase delay estimation and ambiguity-fixed PPP based on raw observable model. J. Geod. 2015, 89, 447–457. [Google Scholar] [CrossRef]
- Boisits, J.; Glaner, M.; Weber, R. Regiomontan: A regional high precision ionosphere delay model and its application in Precise Point Positioning. Sensors 2020, 20, 2845. [Google Scholar] [CrossRef]
- Shepard, D. A Two-Dimensional Interpolation Function for Irregularly-Spaced Data. In Proceedings of the 1968 23rd ACM National Conference, Association for Computing Machinery, New York, NY, USA, 27–29 August 1968. [Google Scholar]
- Matheron, G. Principles of geostatistics. Econ. Geol. 1963, 58, 1246–1266. [Google Scholar] [CrossRef]
- Dai, L.; Han, S.; Wang, J.; Rizos, C. Comparison of interpolation algorithms in network-based GPS techniques. Navigation 2003, 50, 277–293. [Google Scholar] [CrossRef]
- Schaer, S. Mapping and Predicting the Earth’s Ionosphere Using the Global Positioning System; Institut für Geodäsie und Photogrammetrie, Eidg. Technische Hochschule: Zurich, Switzerland, 1999; Volume 59. [Google Scholar]
- Brunini, C.; Meza, A.; Azpilicueta, F.; Van Zele, M.A.; Gende, M.; Díaz, A. A new ionosphere monitoring technology based on GPS. Astrophys. Space Sci. 2004, 290, 415–429. [Google Scholar] [CrossRef]
- Gong, Y.; Cai, C.; Dai, W.; Zhu, J. Least-squares collocation modelling of regional ionospheric TEC for accelerating real-time single-frequency PPP convergence. IET Radar Sonar Navig. 2019, 13, 1031–1038. [Google Scholar] [CrossRef]
- Wang, S.; Li, B.; Gao, Y.; Gao, Y.; Guo, H. A comprehensive assessment of interpolation methods for regional augmented PPP using reference networks with different scales and terrains. Measurement 2020, 150, 107067. [Google Scholar] [CrossRef]
- Cui, B.; Jiang, X.; Wang, J.; Li, P.; Ge, M.; Schuh, H. A new large-area hierarchical PPP-RTK service strategy. GPS Solut. 2023, 27, 134. [Google Scholar] [CrossRef]
- Stein, M.L. Interpolation of Spatial Data: Some Theory for Kriging; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Odijk, D.; Zhang, B.; Khodabandeh, A.; Odolinski, R.; Teunissen, P.J.G. On the estimability of parameters in undifferenced, uncombined GNSS network and PPP-RTK user models by means of S-system theory. J. Geod. 2016, 90, 15–44. [Google Scholar] [CrossRef]
- Pan, L.; Zhang, X.; Li, X.; Liu, J.; Li, X. Characteristics of inter-frequency clock bias for Block IIF satellites and its effect on triple-frequency GPS precise point positioning. GPS Solut. 2017, 21, 811–822. [Google Scholar] [CrossRef]
- Pan, L.; Xiong, B.; Li, X.; Yu, W.; Dai, W. High-rate GNSS multi-frequency uncombined PPP-AR for dynamic deformation monitoring. Adv. Space Res. 2023, 72, 4350–4363. [Google Scholar] [CrossRef]
- Temiissen, J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Teunissen, P.; Joosten, P.; Tiberius, C. Geometry-Free Ambiguity Success Rates in Case of Partial Fixing. In Proceedings of the 1999 National Technical Meeting of the Institute of Navigation, Catamaran Resort Hotel, San Diego, CA, USA, 25–27 January 1999. [Google Scholar]
- Zhou, F.; Dong, D.; Li, W.; Jiang, X.; Wickert, J.; Schuh, H. GAMP: An open-source software of multi-GNSS precise point positioning using undifferenced and uncombined observations. GPS Solut. 2018, 22, 33. [Google Scholar] [CrossRef]
- Liu, J.; Chen, R.; Wang, Z.; Zhang, H. Spherical cap harmonic model for mapping and predicting regional TEC. GPS Solut. 2011, 15, 109–119. [Google Scholar] [CrossRef]
- Orús, R.; Hernández-Pajares, M.; Juan, J.M.; Sanz, J. Improvement of global ionospheric VTEC maps by using kriging interpolation technique. J. Atmos. Sol.-Terr. Phys. 2005, 67, 1598–1609. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Server | User |
|---|---|---|
| Frequency | L1, L2, L5 | L1, L2 |
| Variance of observations | , where is elevation | Same as server |
| Elevation cutoff angle | 7.5° | Same as server |
| Satellite orbit and clock | Products from Center for Orbit Determination | Same as server |
| Antenna phase center offsets and variations | igs14_2035.atx | Same as server |
| Differential code bias | Products from Chinese Academy of Sciences | Same as server |
| Receiver coordinates | Estimated as constants | Estimated as white noise |
| Tropospheric delay | Dry component corrected by Saastamoinen model with atmospheric pressure , where is the altitude of the station; zenith wet delay estimated as a random walk | Same as server |
| Ionospheric delay | Estimated as a random walk | Pseudo-observable variances: |
| Receiver clock Ambiguities | Estimated as white noise Estimated as constants | Same as server Same as server |
| Ionospheric Model | Convergence Time (min) | RMS (cm) | ||
|---|---|---|---|---|
| Horizontal | Vertical | Horizontal | Vertical | |
| PFM | 2.2 | 4.4 | 1.4 | 2.6 |
| PFM/IDWI | 2.1 | 4.2 | 1.4 | 2.5 |
| PFM/KI | 1.8 | 4.0 | 1.3 | 2.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Cai, C.; Pan, L.; Dai, W.; He, B. A Two-Step Regional Ionospheric Modeling Approach for PPP-RTK. Sensors 2024, 24, 2307. https://doi.org/10.3390/s24072307
Xu Z, Cai C, Pan L, Dai W, He B. A Two-Step Regional Ionospheric Modeling Approach for PPP-RTK. Sensors. 2024; 24(7):2307. https://doi.org/10.3390/s24072307
Chicago/Turabian StyleXu, Zhenyu, Changsheng Cai, Lin Pan, Wujiao Dai, and Bei He. 2024. "A Two-Step Regional Ionospheric Modeling Approach for PPP-RTK" Sensors 24, no. 7: 2307. https://doi.org/10.3390/s24072307
APA StyleXu, Z., Cai, C., Pan, L., Dai, W., & He, B. (2024). A Two-Step Regional Ionospheric Modeling Approach for PPP-RTK. Sensors, 24(7), 2307. https://doi.org/10.3390/s24072307