

Vehicular Visible Light Positioning System Based on a PSD Detector
 , ,
, ,  ,
,  , and
, and 
Abstract
:1. Introduction
2. Background
3. System Model and Vehicle Localization
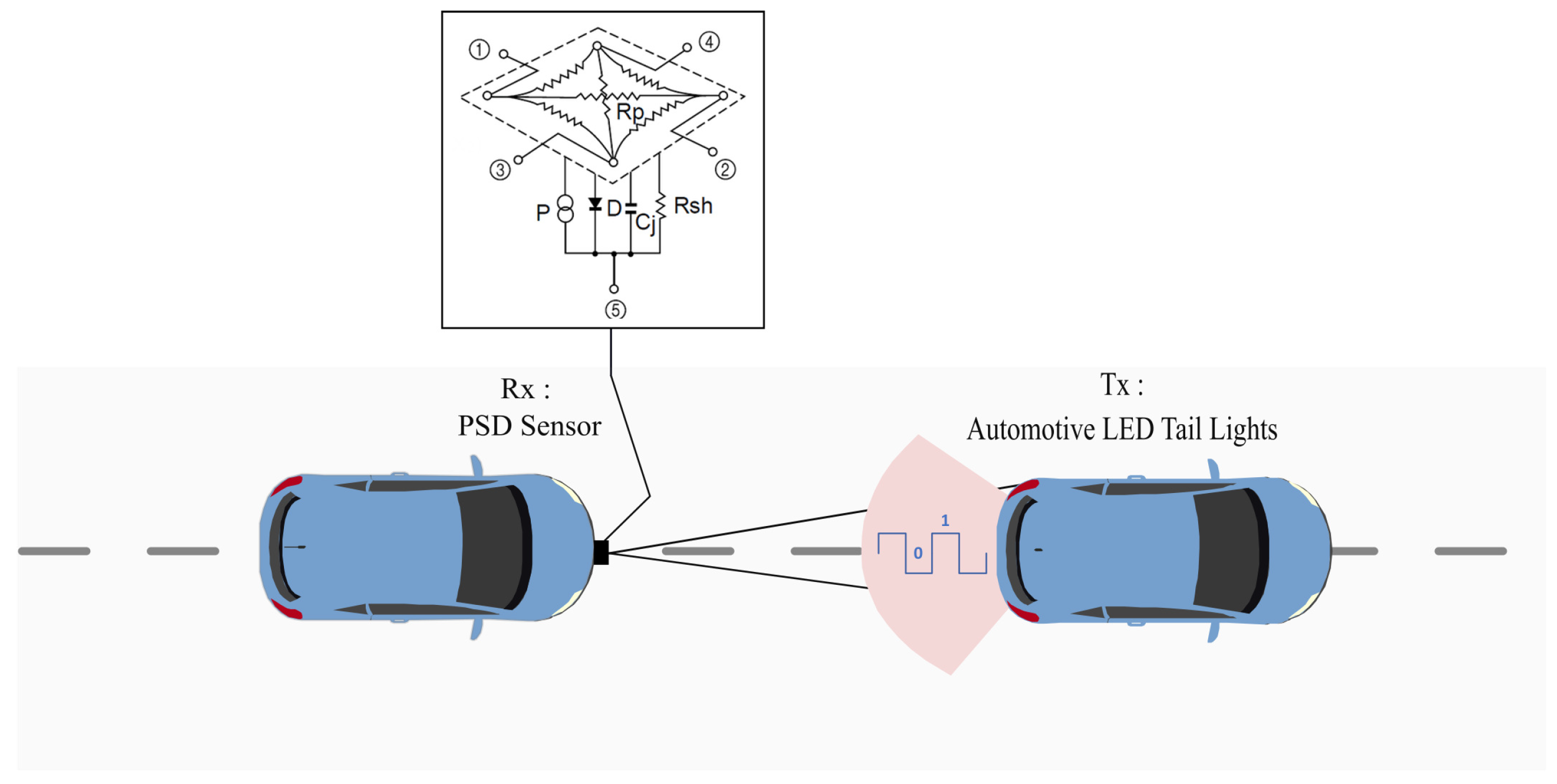
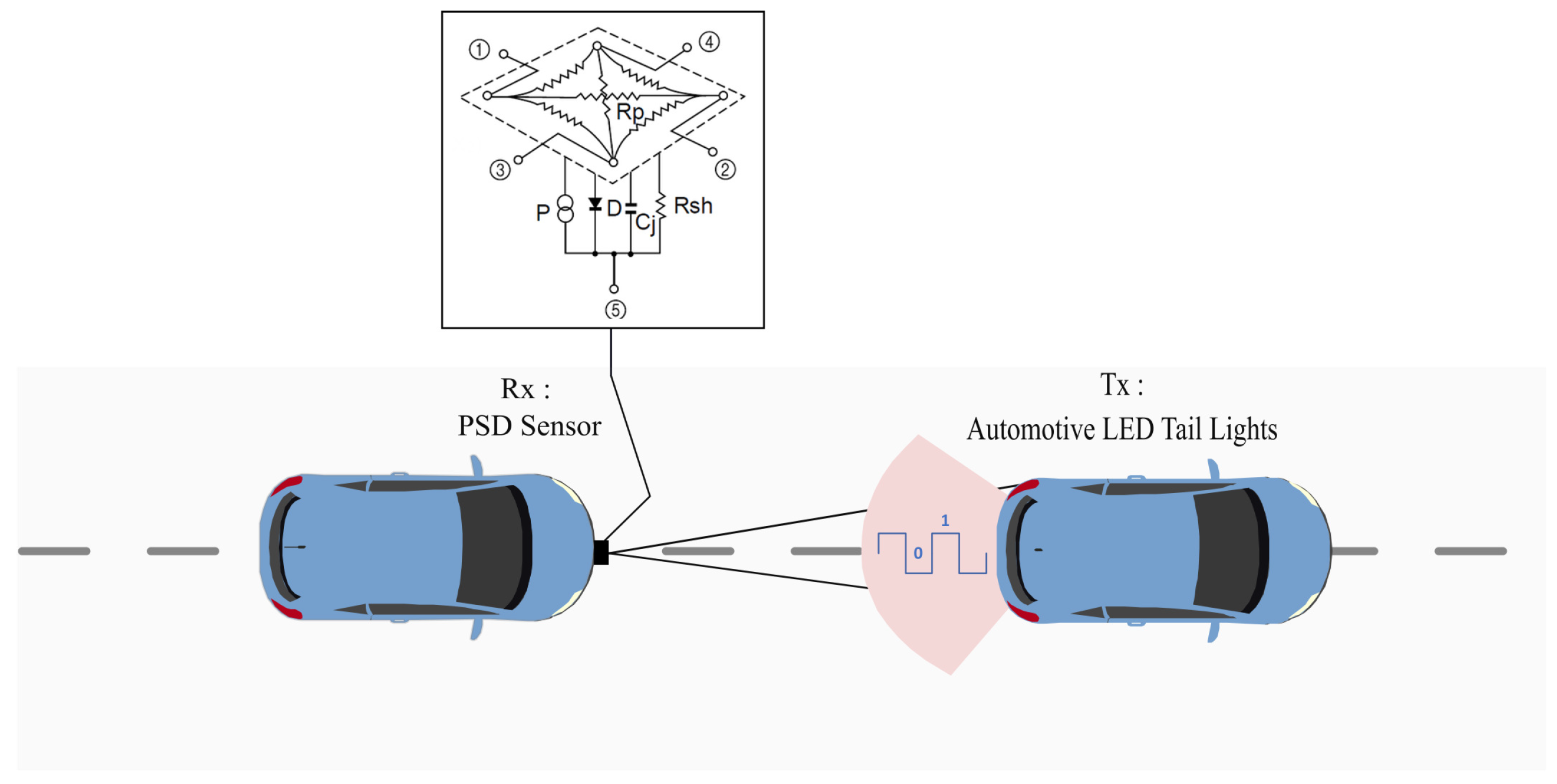
3.1. System Model
Problems That Arise Developing the System with PSD
- Component tolerances (feedback resistor and amplifier stage capacitor) affect the variance of the gains. Each of the four output PSD signals is, therefore, amplified by a factor. This amplification will cause a deviation in the determination of the actual point of impact. Both tolerances should be modeled on a uniform distribution using realistic values for components and their tolerances. In addition, will depend on the frequency. Although the frequency used for this PSD is less than 50 kHz, the frequency and tolerances will be analyzed together. These factors will provide a relevant error in the total error analyzed, even using low tolerance values.
- Temperature changes in the gain component values. Different profiles of operating temperatures and temperature component coefficients based on realistic values should be used in the simulation and test phases. A uniform distribution should be modeled to incorporate the above characteristics. Changes in temperature will cause changes in the nominal values of the components. However, it can be considered as an independent effect of the tolerance components. For this situation, it is estimated that the generated error will not be a notorious contribution because the temperature effect will have the same influence in all system components.
- Influence of system noise. There will be a correlation between them. The different types of noise to be evaluated will be: shot, thermal, and operational amplifier noise. All will be analyzed under a white Gaussian noise hypothesis .
- The shot noise depends on the dark current and the sensor (photodiode) current. This noise source will be the main contribution to the total error of this stage. Although the PSD sensor used in this work (pin-cushion) produces less dark current than others, the shot noise will mainly be the most notable error.
- Thermal noise depends on the component values, temperature variations, and equivalent bandwidth. This type of noise is correlated with the previous analysis (component tolerance and temperature variations). The degree of correlation between them depends on the tolerance and temperature variations, but the contribution of the shot noise (independent of them) has more influence than this. In order to simplify the analysis, each should be evaluated separately. The influence of this error in the impact sensor point depends on the SNR.
- Amplifier noise does not depend on external parameters. It will only depend on the type of operational amplifier. For this reason, we suggest choosing a low noise FET type. The use of band-pass filters to reduce the signal noise eliminates the offset, so bias currents and offset voltages and currents at the amplifier input do not affect the system.
3.2. Vehicle Localization with AOA-Based VLP
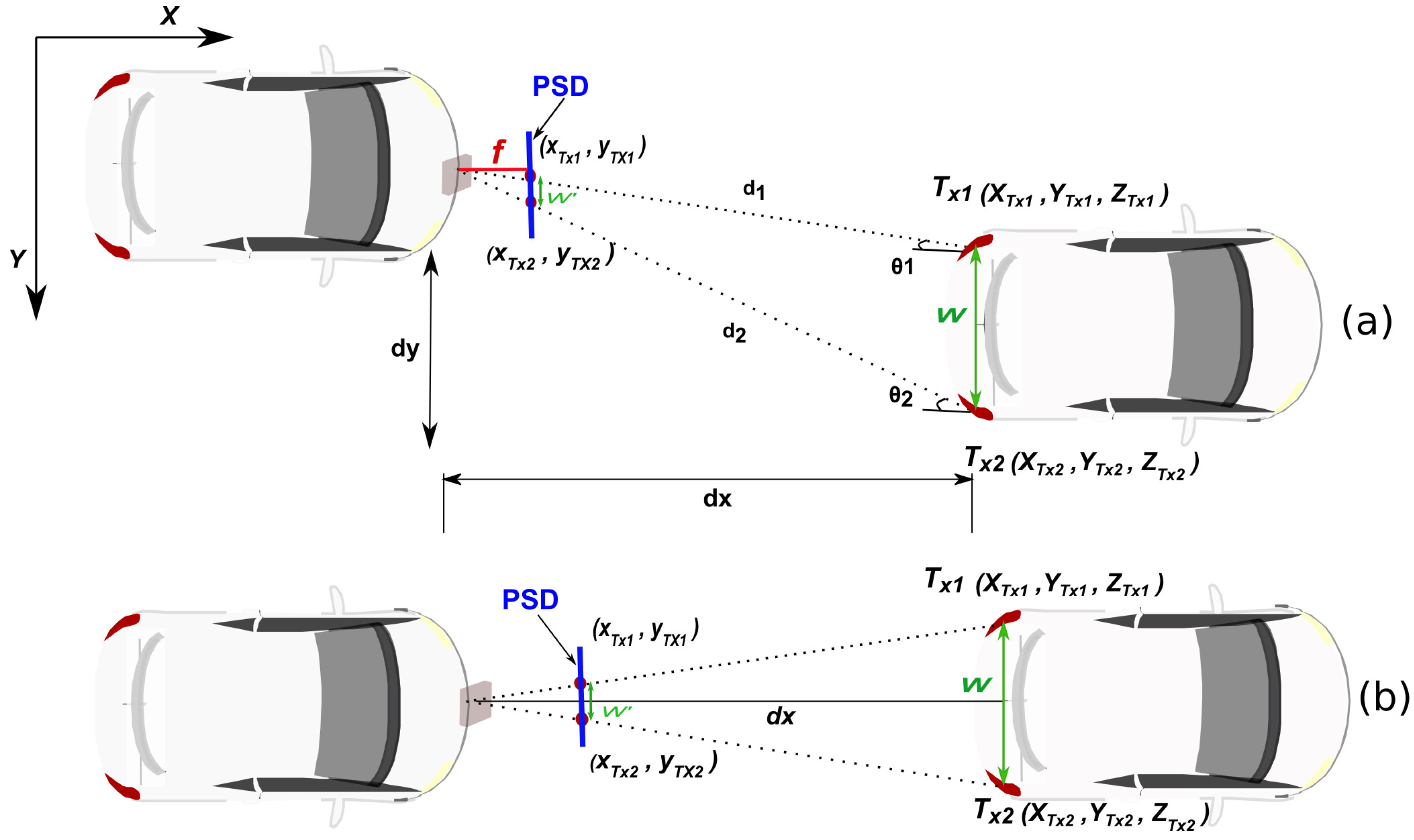
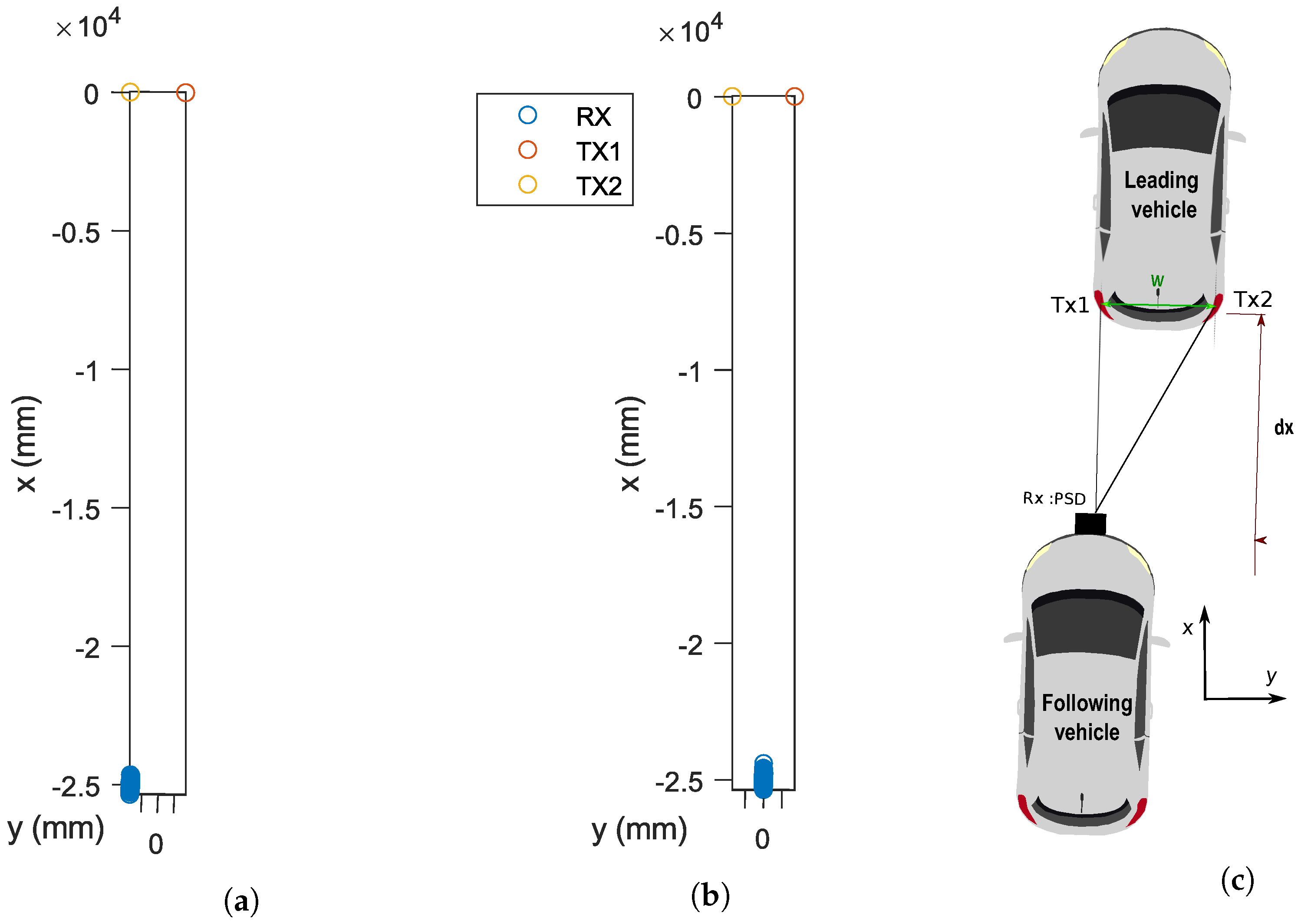
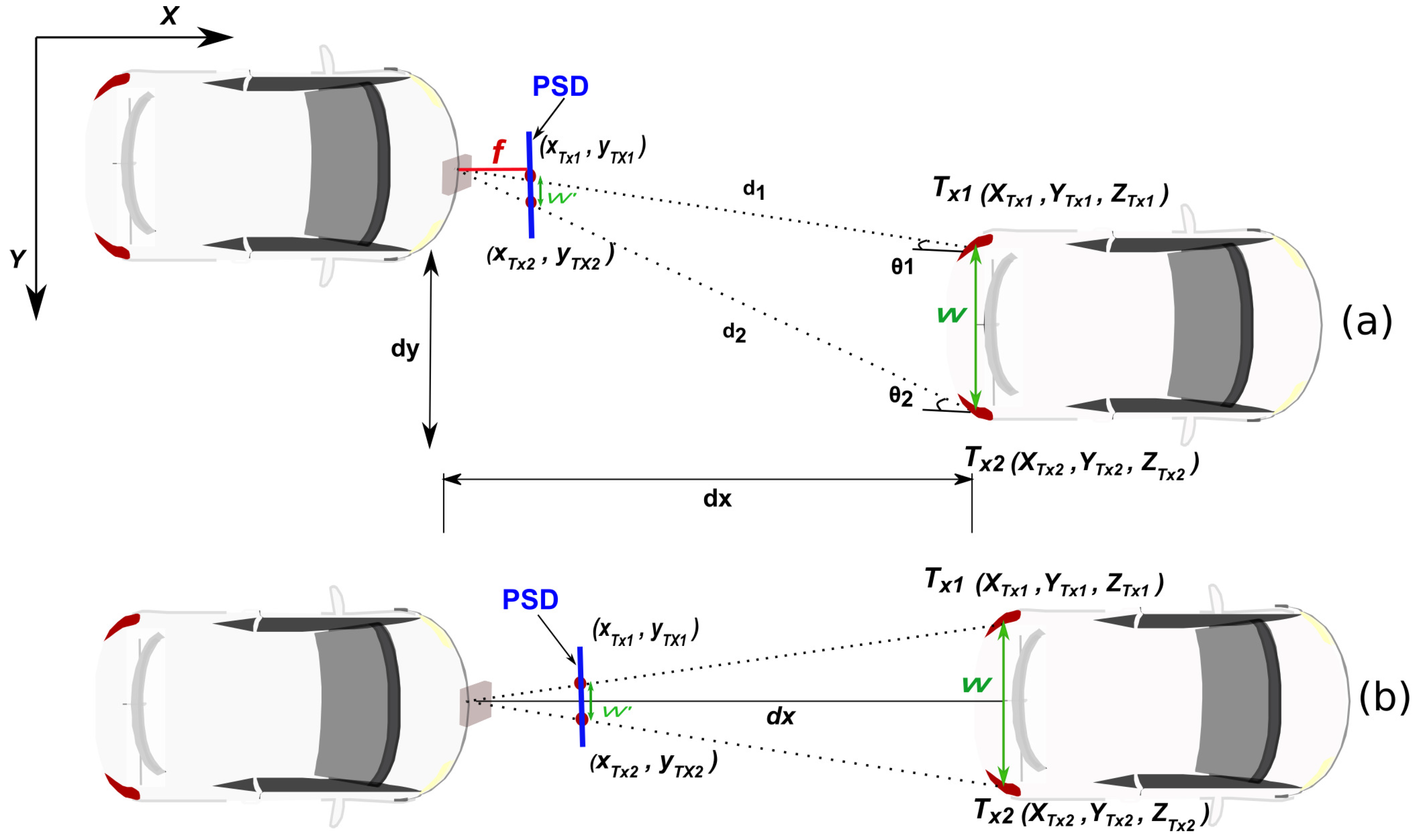
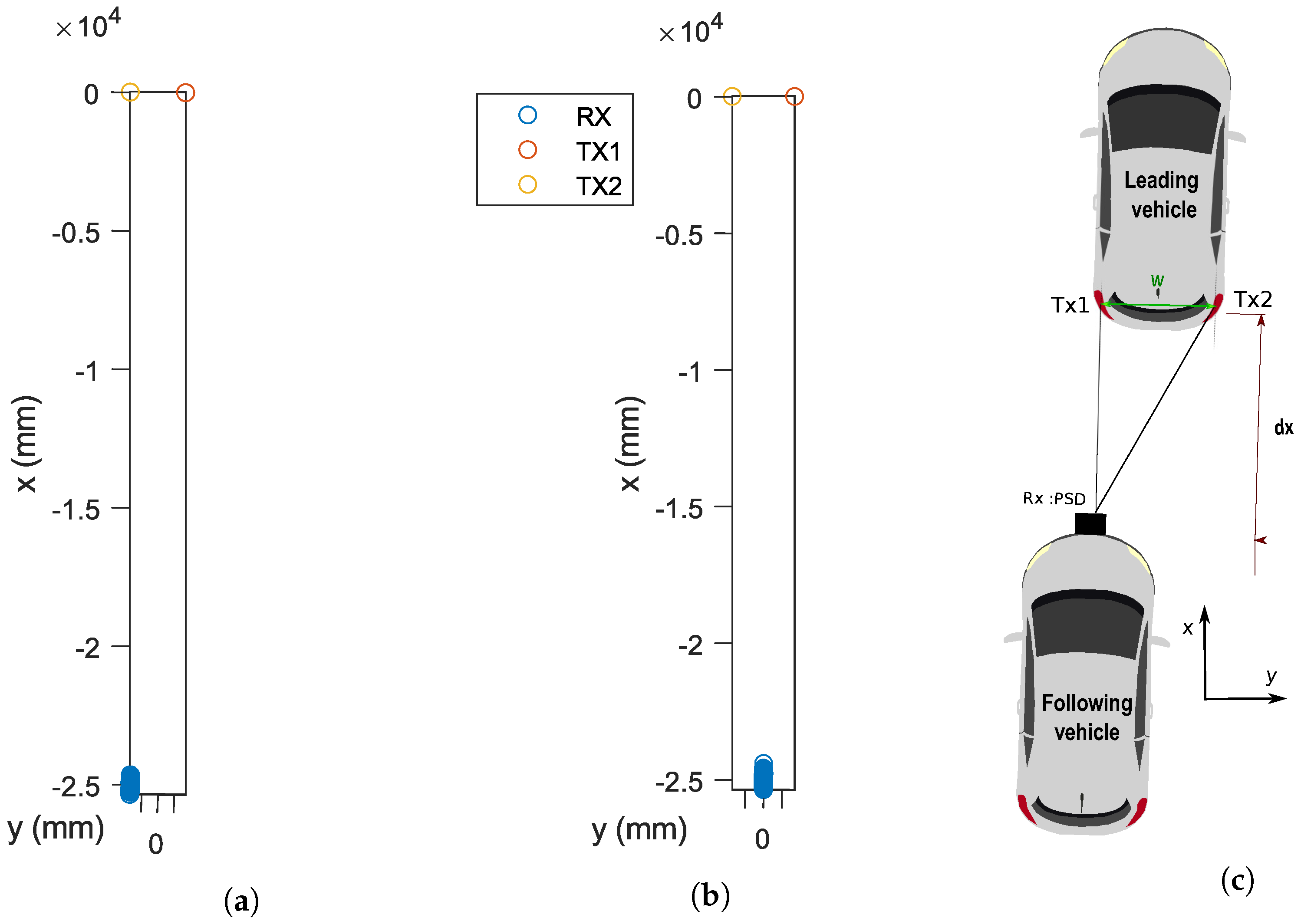
- Scenario A: the leading vehicle with two rear light emitters and the following vehicle with a PSD sensor. The vehicles are not perfectly aligned, introducing a lateral offset. The distance between the two rear lights (emitters) is known. Let us define as the longitudinal distance from the PSD to the midpoint between the two rear lights. w represents the distance between the two rear lights. presents the lateral offset—the distance by which the following car is displaced to the side relative to the leading car’s centerline.
- Scenario B: (Vehicles aligned, ). In this case, the cars are aligned on the horizontal axis and there is no lateral component . We can estimate the inter-vehicular distance using the known width between two taillights and the projection of these points on the PSD sensor.
4. Methodology for Performing Simulations and Measurements
- Configuration Setup. The configuration setup concerns how the general parameters of the system are configured, such as the sampling frequency, modulation type, number of transmitters, and the characteristics of both the transmitter and the receiver. This essential configuration paves the way for the next phase, the generation of the emitted signal, where the signal that will be emitted by each of the emitters is generated depending on the type of modulation and technique defined previously.
- Channel: In this stage, the behavior of the channel is simulated from the moment the signal is emitted by the emitters until it is finally received by the PSD sensor.
- PSD:
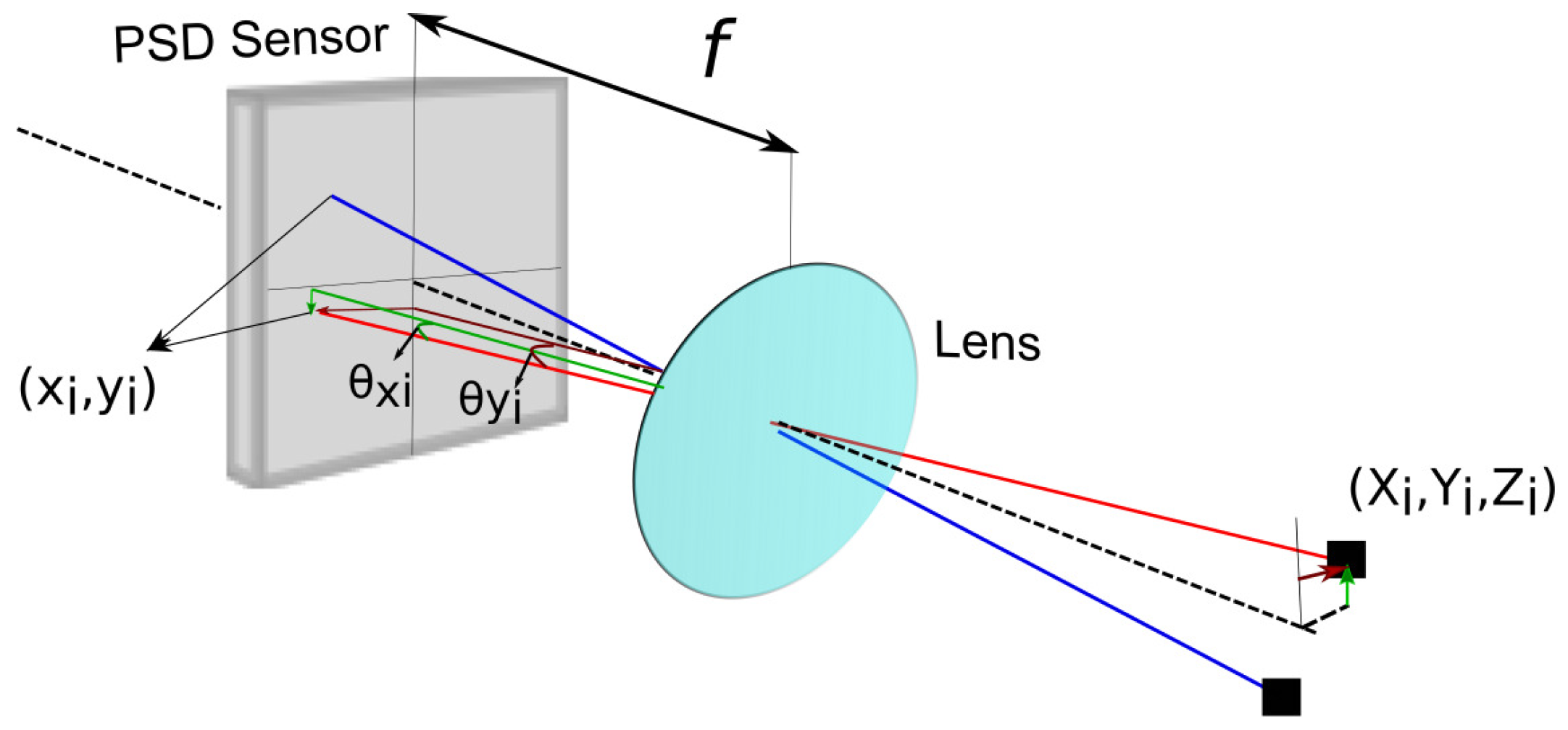
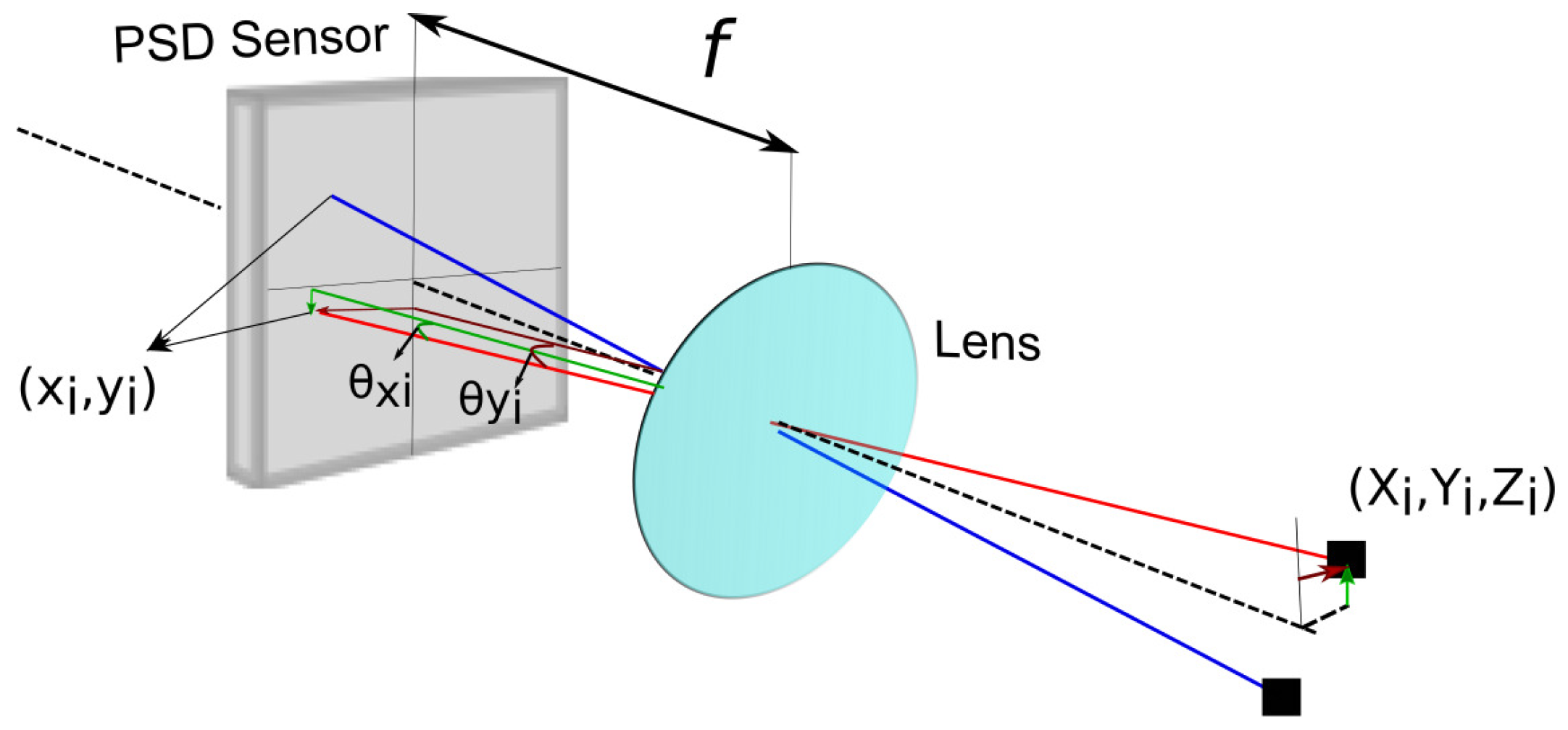
- In this step, the impact point of each of the emitters on the surface of the PSD sensor is obtained from the coordinates and orientations of both the emitters and the PSD receiver.
- Attenuation. At this stage, the signal that would reach the receiver is obtained, formed by the emitted signal attenuated according to the received power value.
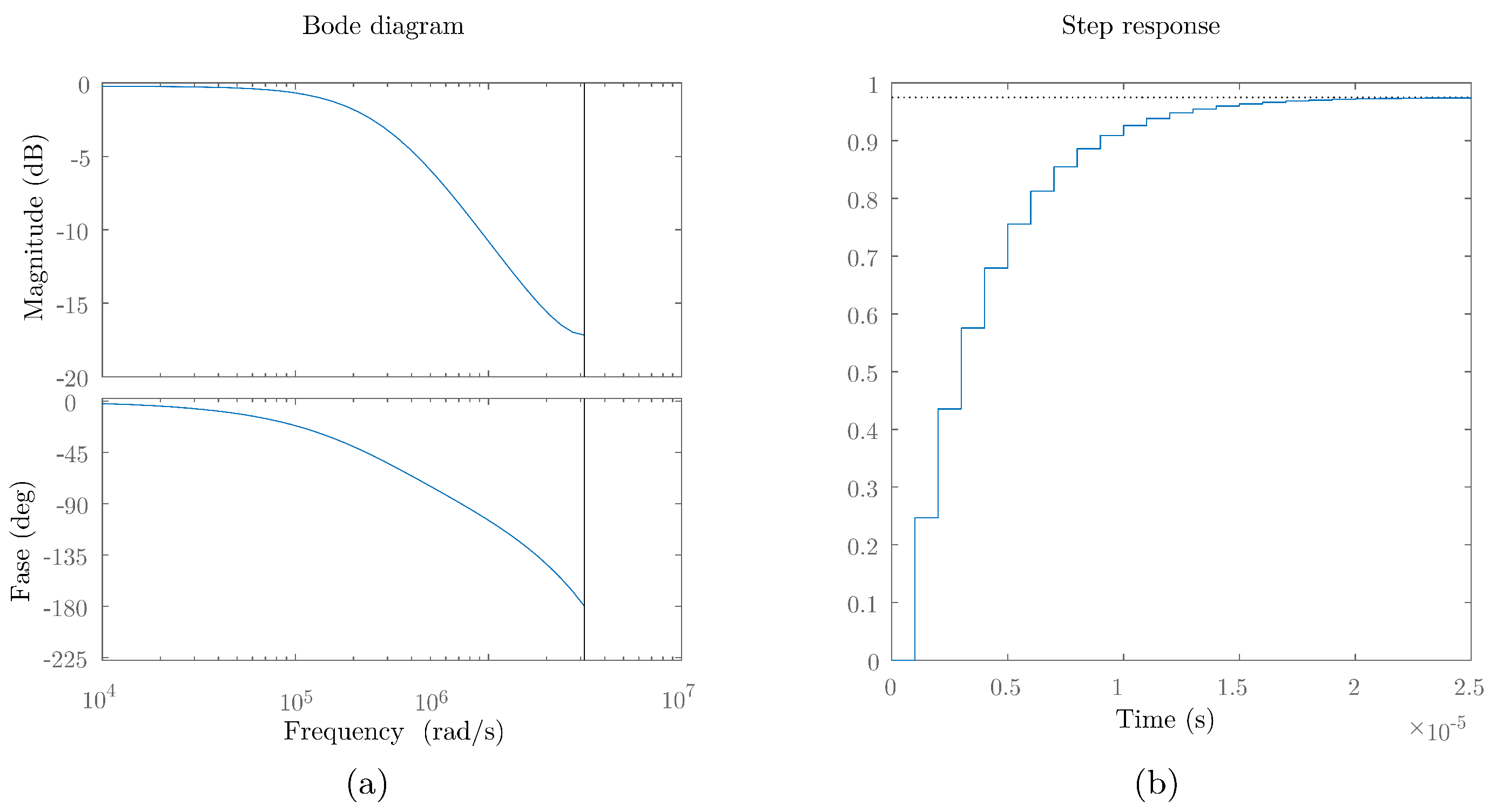
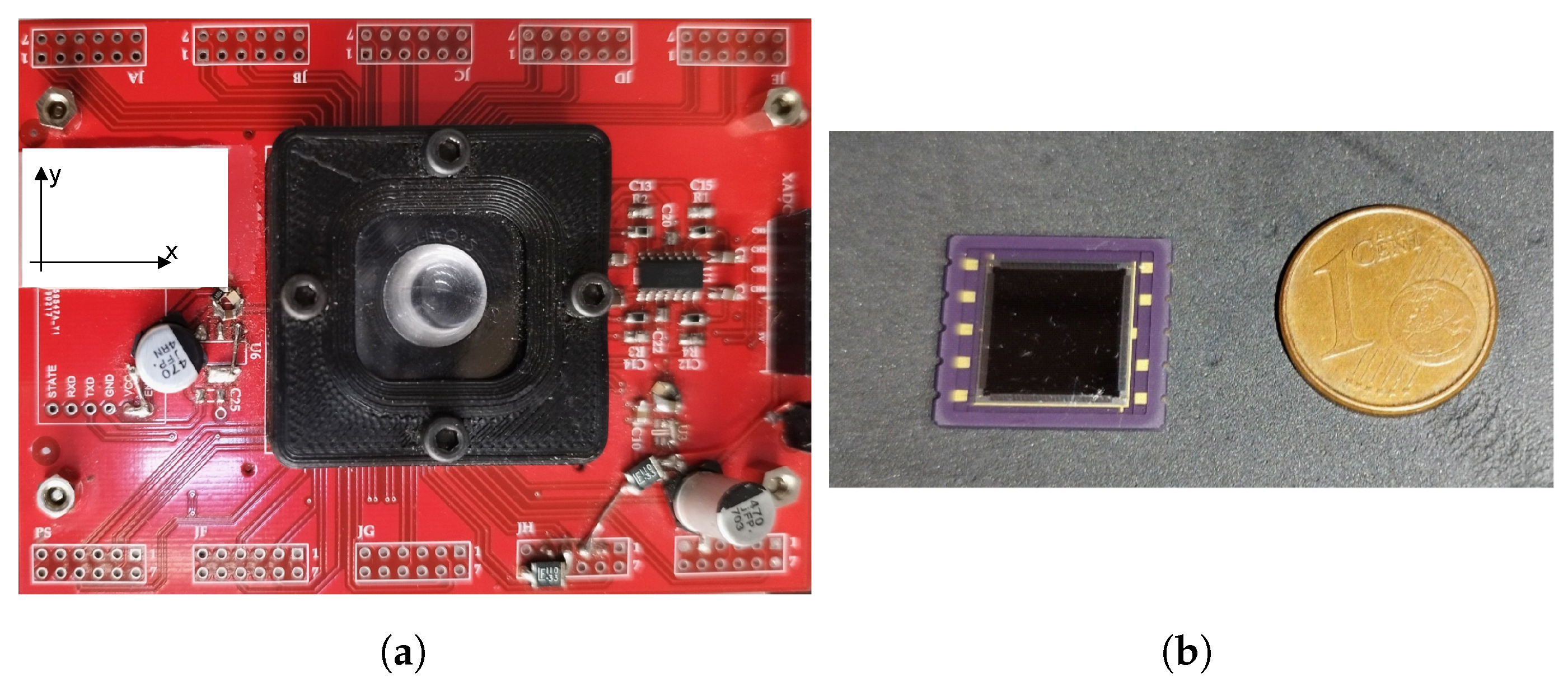
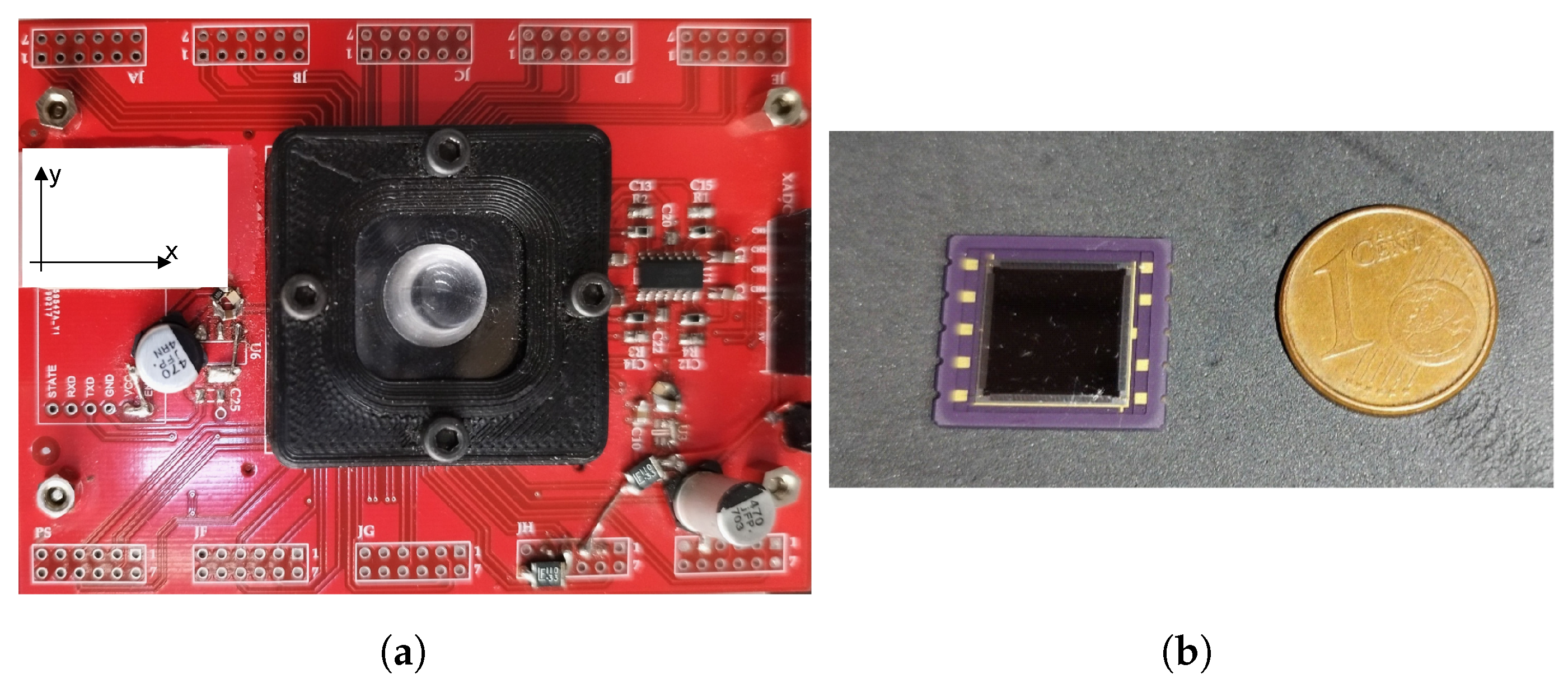
- PSD transfer function. The signal coming from the previous stage is passed through the transfer function to obtain the real one that would be received by the PSD from each of the emitters. To model the behavior of the PSD, its transfer function was obtained experimentally. For this purpose, a step signal was emitted with a transmitter and this signal was received in the PSD. In Figure 5, the Bode diagram and the step response of the experimental PSD transfer function are shown.From the values in Figure 5, the experimental transfer function of the PSD was estimated. For the case of a sampling frequency of 1 MHz, the following transfer function was obtained:It is worth noting that in this simulation, a Hamamatsu S5991-01 PSD (Hamamatsu, Iwata City, Japan) with a surface area of 9 × 9 mm2 was modeled. This PSD obtains a bandwidth of 200 kHz, which is sufficient for a wide range of communication and/or positioning applications. However, it would be possible to use a smaller PSD (4 × 4 instead of 9 × 9) to increase the frequency response ×7 (up to 1.5 MHz) but the field of view would be half considering the same focal length in the lenses used.
- Amplitude of each channel as a function of the impact point. Depending on the impact point on the PSD surface, a different amplitude is generated at each of the sensor anodes. This amplitude is related to the distance between the impact point and the corner corresponding to the channel (Equations (1) and (2)).
- Signal from each transmitter and PSD channel. The signal after passing through the transfer function would correspond to the total signal (sum of the signals from the four channels) received by the receiver from each of the transmitters. To obtain the signal from each of the four channels from the total signal, the total signal is multiplied by a value . This value is a value between 0 and 1, and their sum is 1 (). corresponds to the proportion of the total power that reaches each channel c, which depends on the impact point.
- Signal from each channel. At this stage, the contribution of each of the transmitters in each of the PSD channels is added and the continuous signal is eliminated.
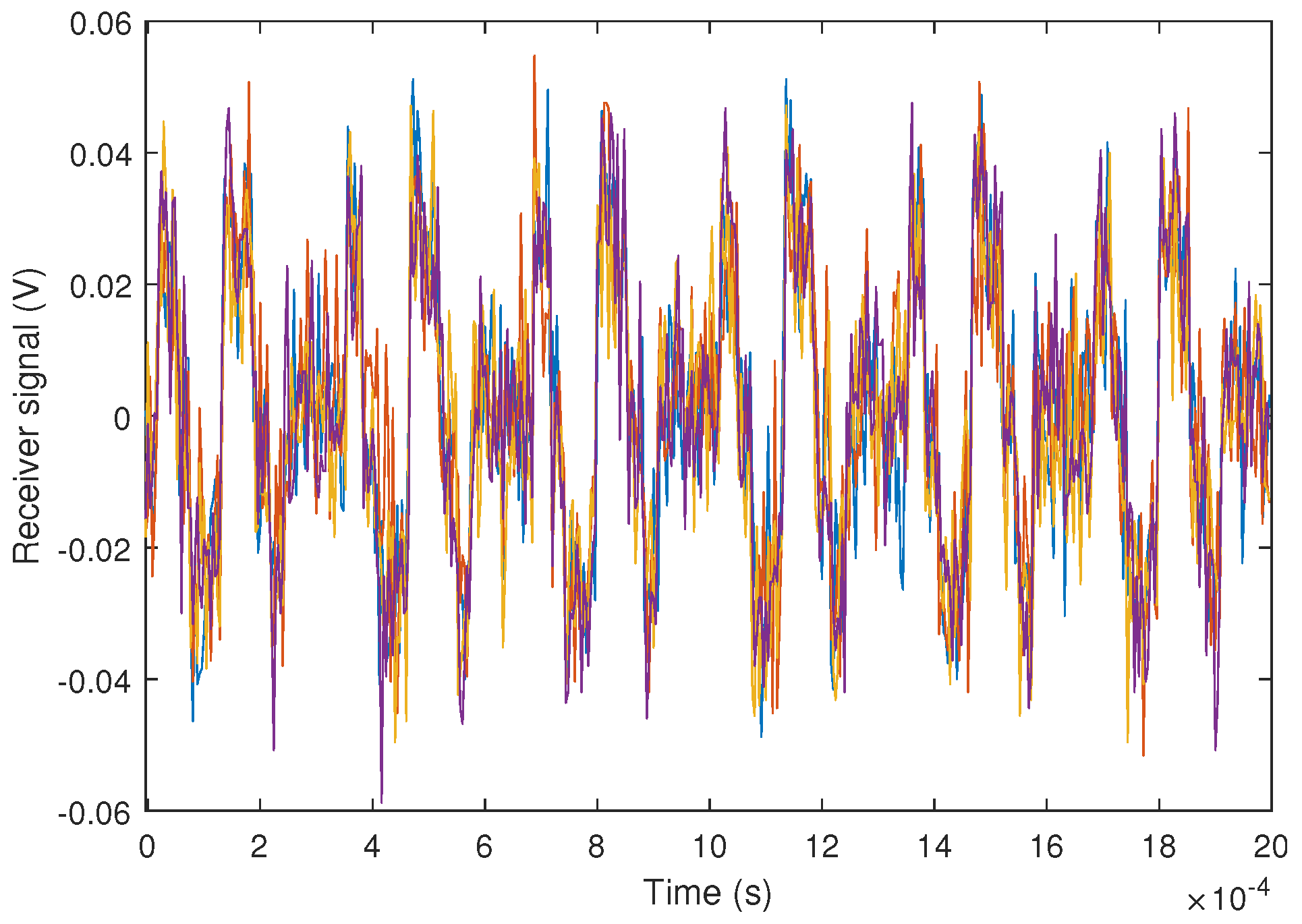
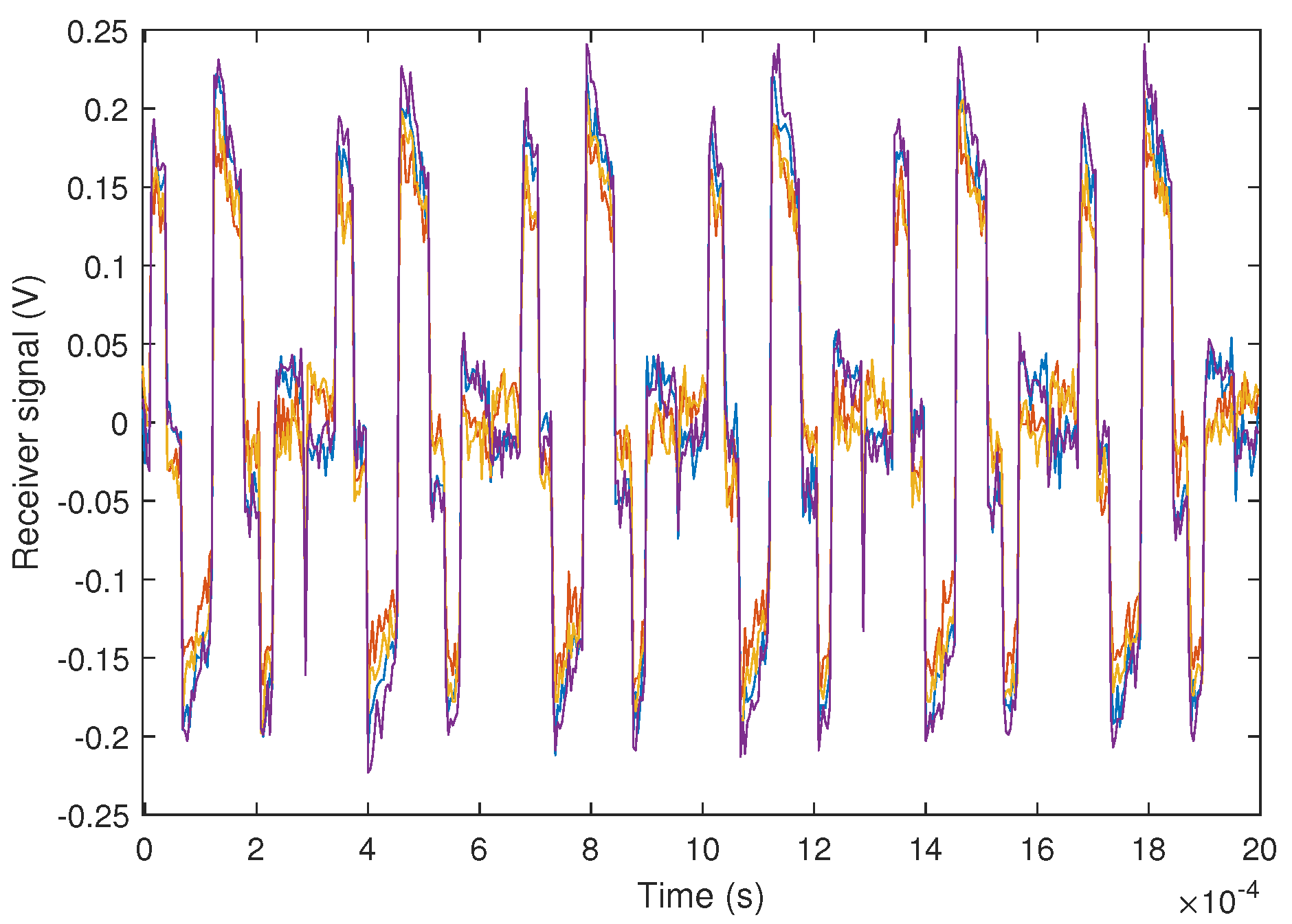
- Noise generation. At this stage, all noise components will be combined into a single noise component. The noise considered is white Gaussian noise. Depending on the received signal and the SNR to be analyzed, a different noise signal will be generated. Therefore, when simulating the noise, the following strategy is followed: After capturing the signals received by each of the four channels of the PSD under conditions without noise, we proceed to compute the total power, denoted as , of the received signals. Following this, we can determine the noise power , represented as:
- For each channel of the PSD, we generate Gaussian noise with a zero mean and a noise power that is one-quarter of the total power. This noise generation is based on the following formula:employing randn, a MATLAB function that produces random numbers with a normal distribution. Subsequently, we add this generated noise to the signal of each of the four channels, effectively modifying each signal with its respective noise component.
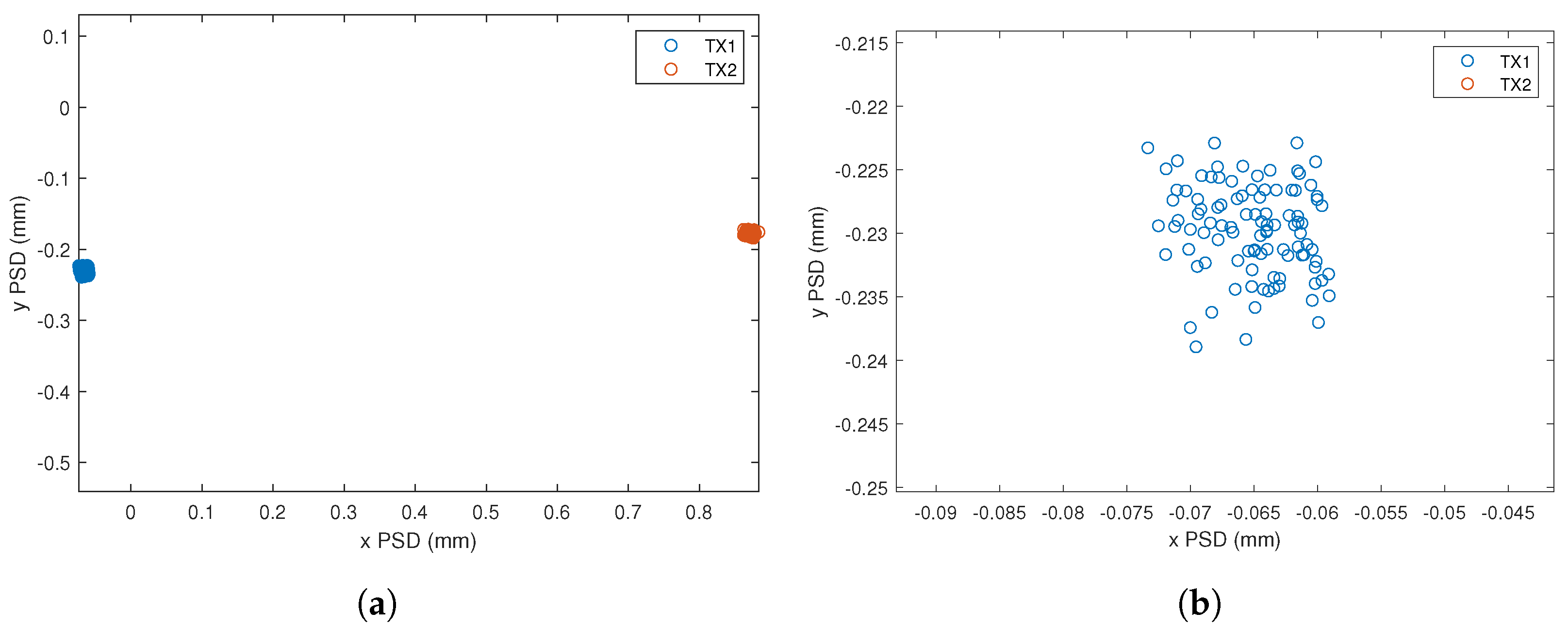
- Calculate emitter position: The signal from each emitter is discriminated by each of the anodes of the PSD [12], and with that signal, the impact point of each emitter on the surface of the PSD is obtained. Once the impact point on the surface of the PSD is known, and based on the intrinsic and extrinsic parameters, the position of the emitters is estimated.
- Estimate distance between Tx and Rx: Estimating the longitudinal distance between cars (inter-vehicular distance) as well as their lateral separation.
5. Results
5.1. Simulation Setup
5.2. Simulation Results
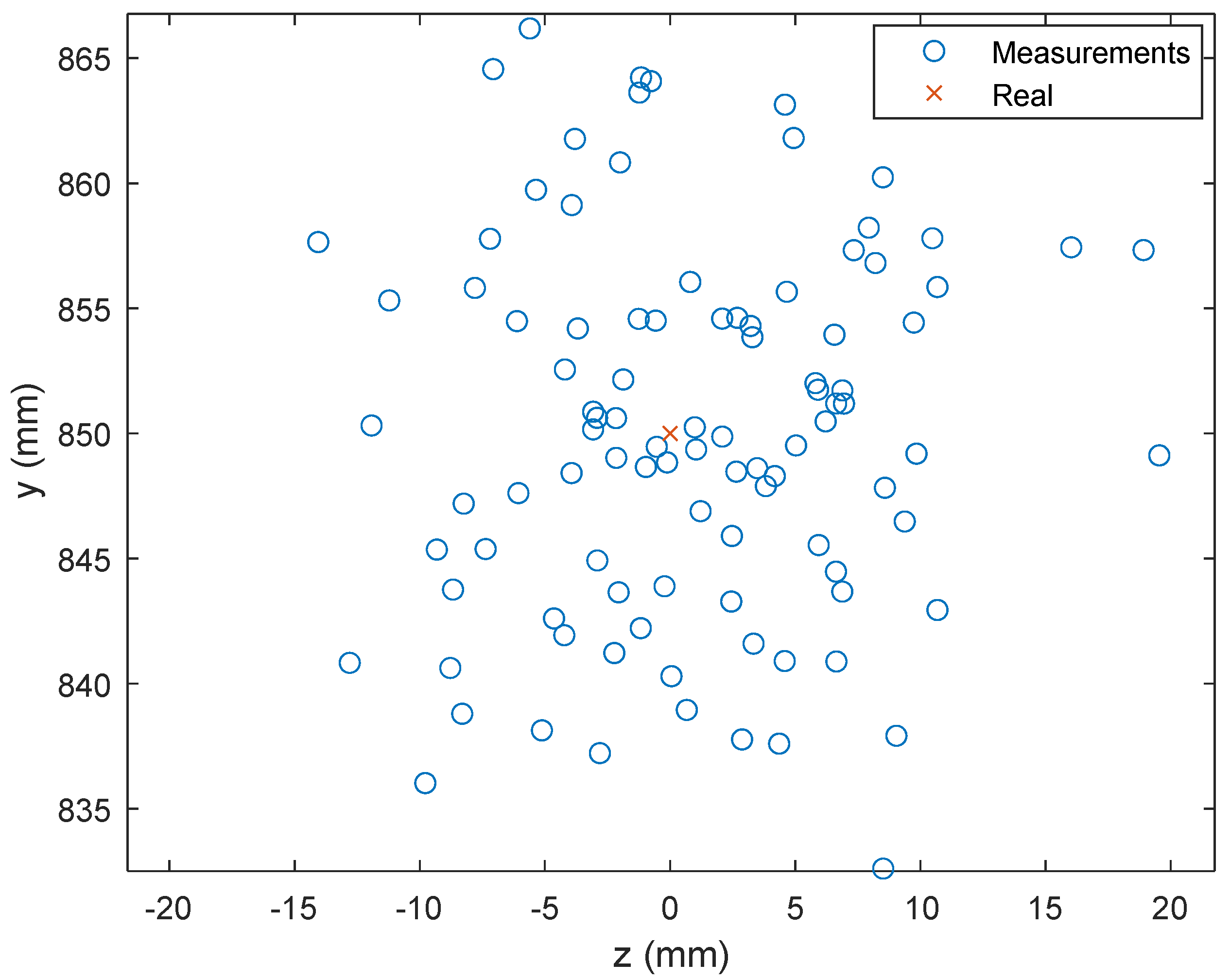
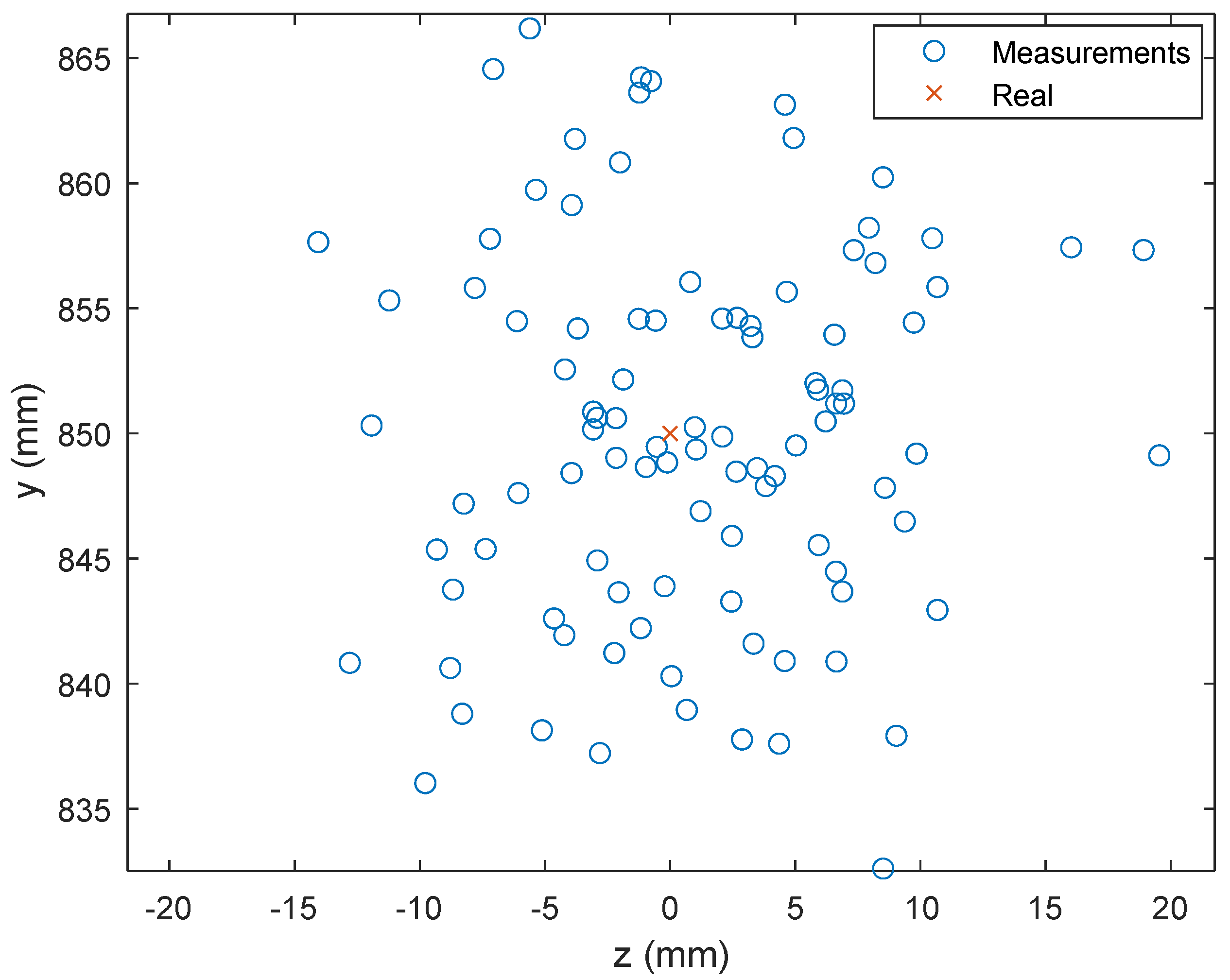
5.2.1. Receiver Position Estimation
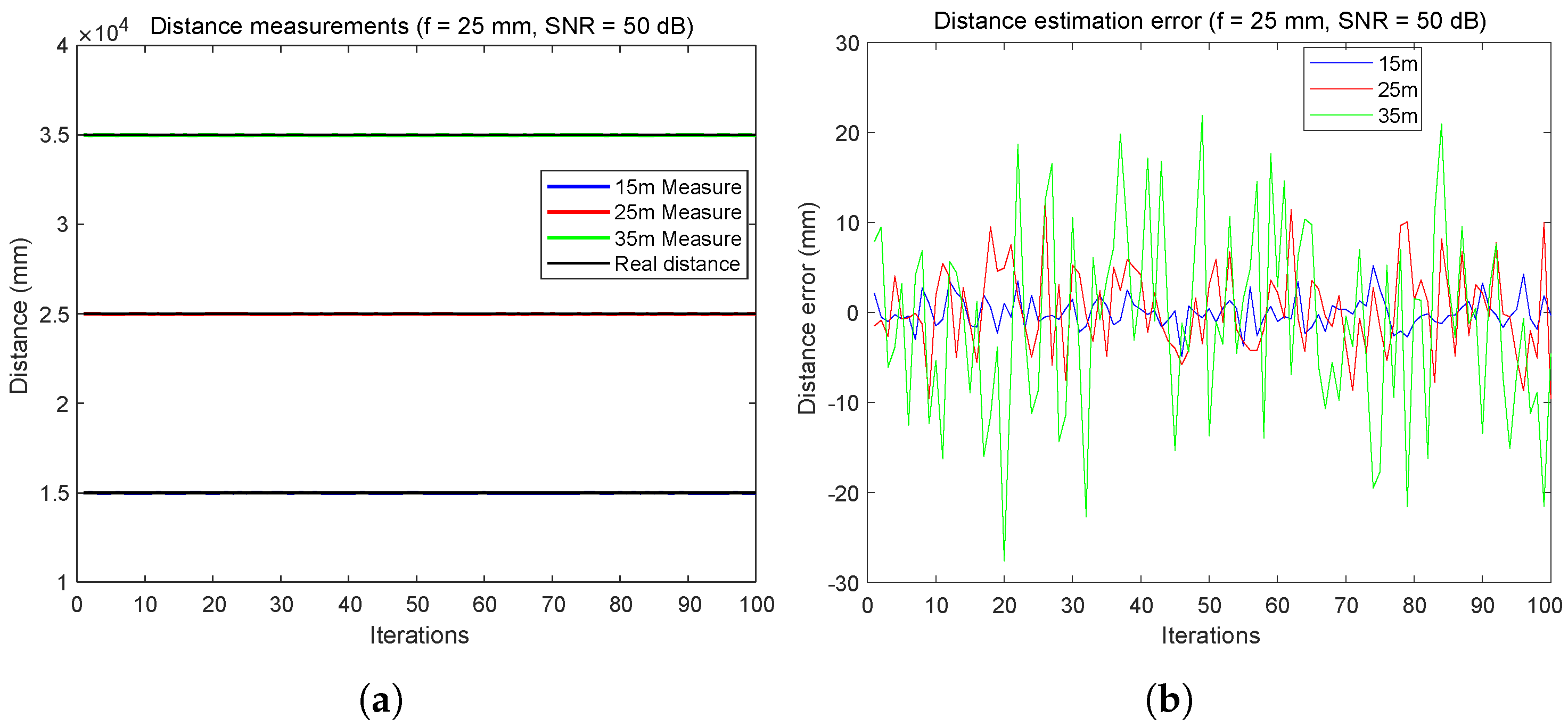
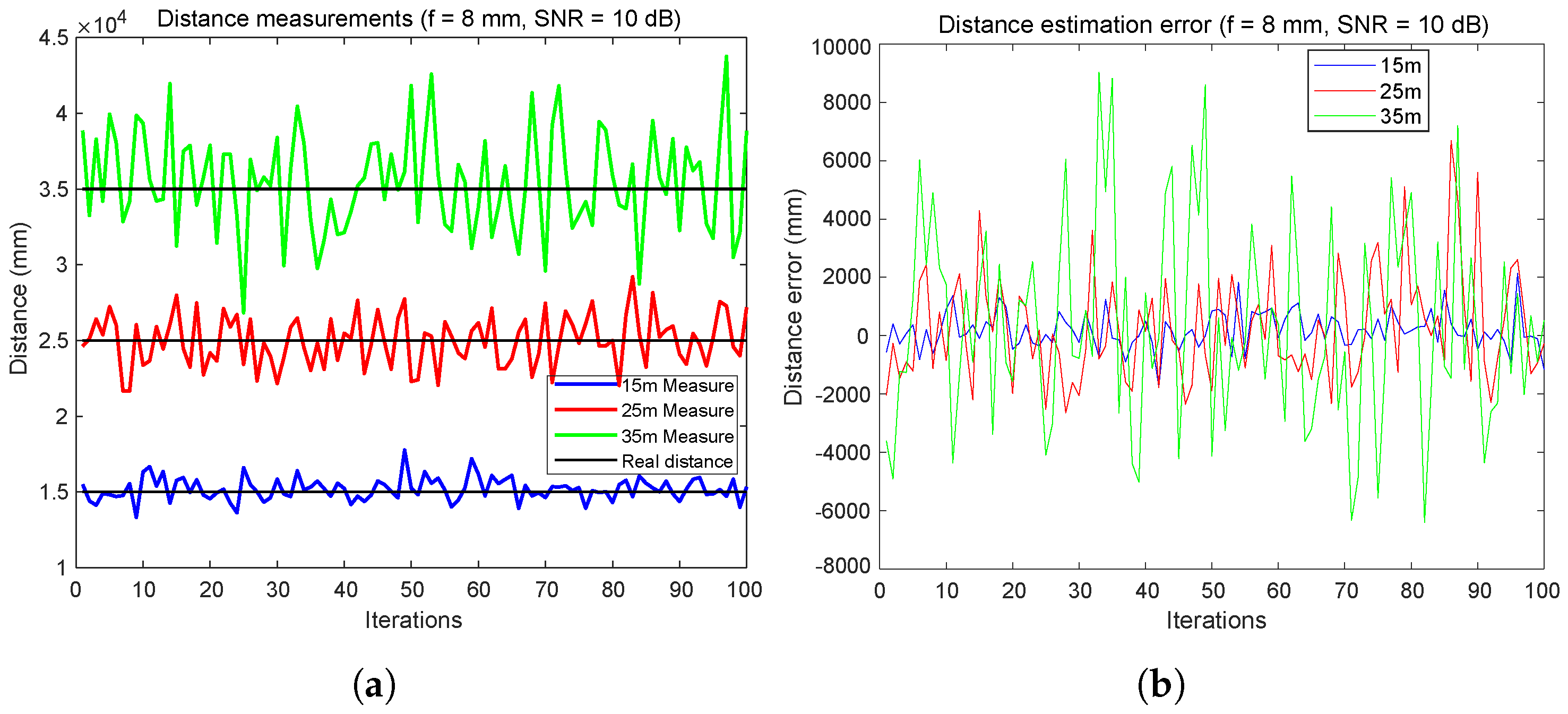
5.2.2. Inter-Vehicular Distance Estimation Scenario A
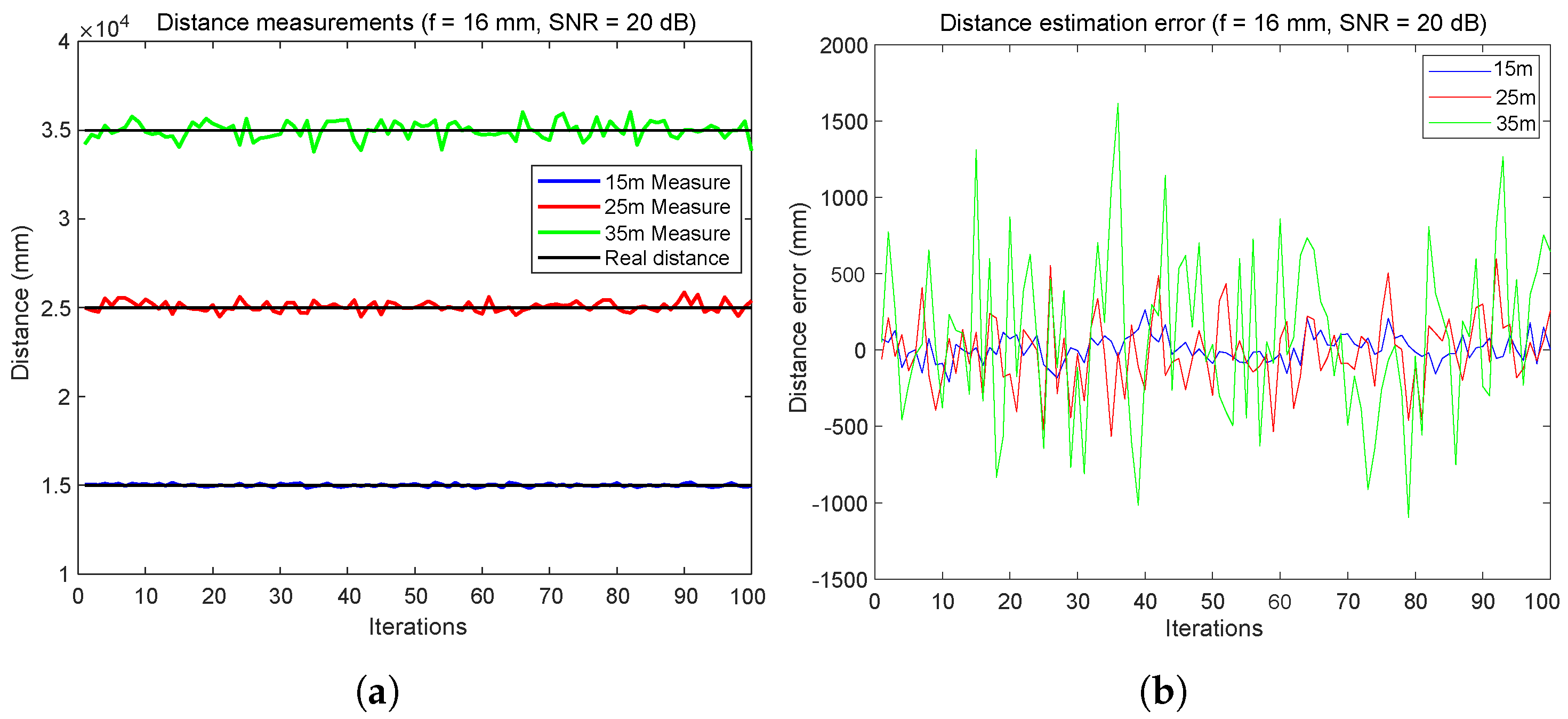
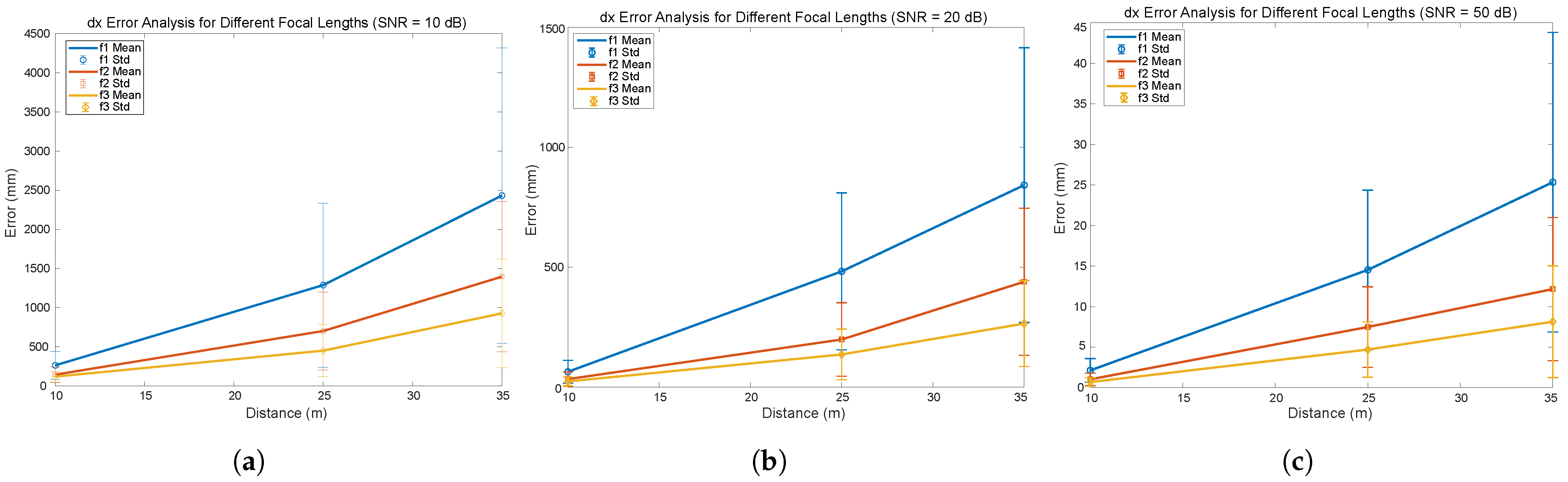
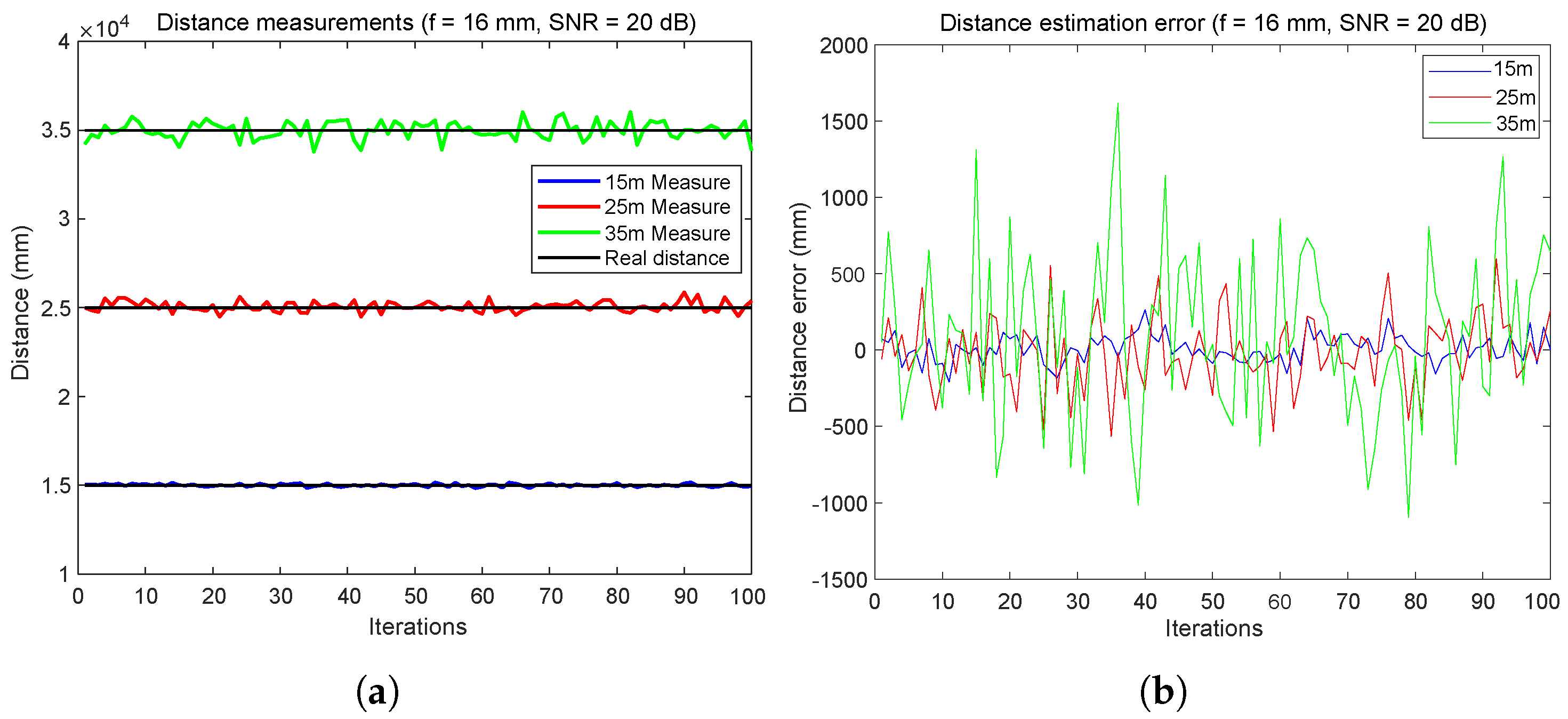
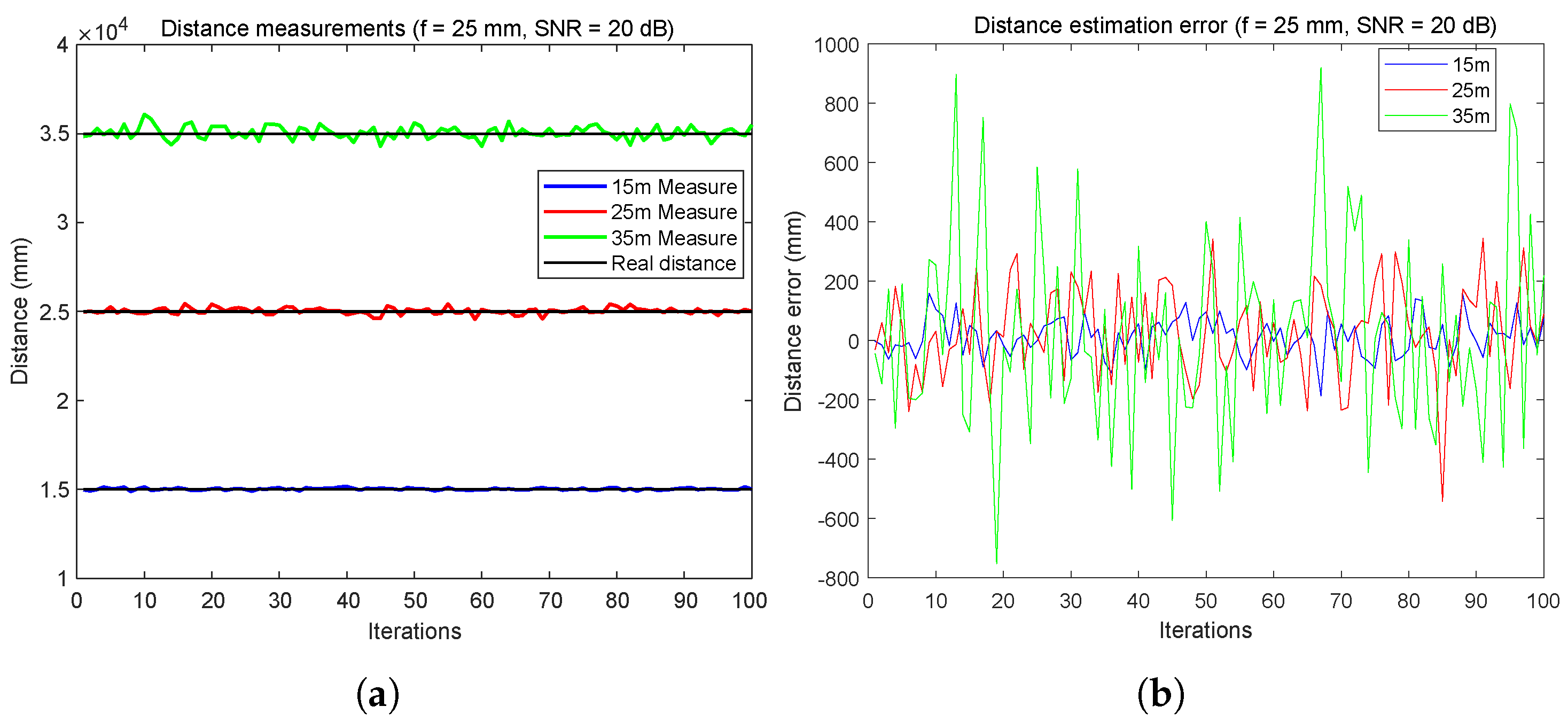
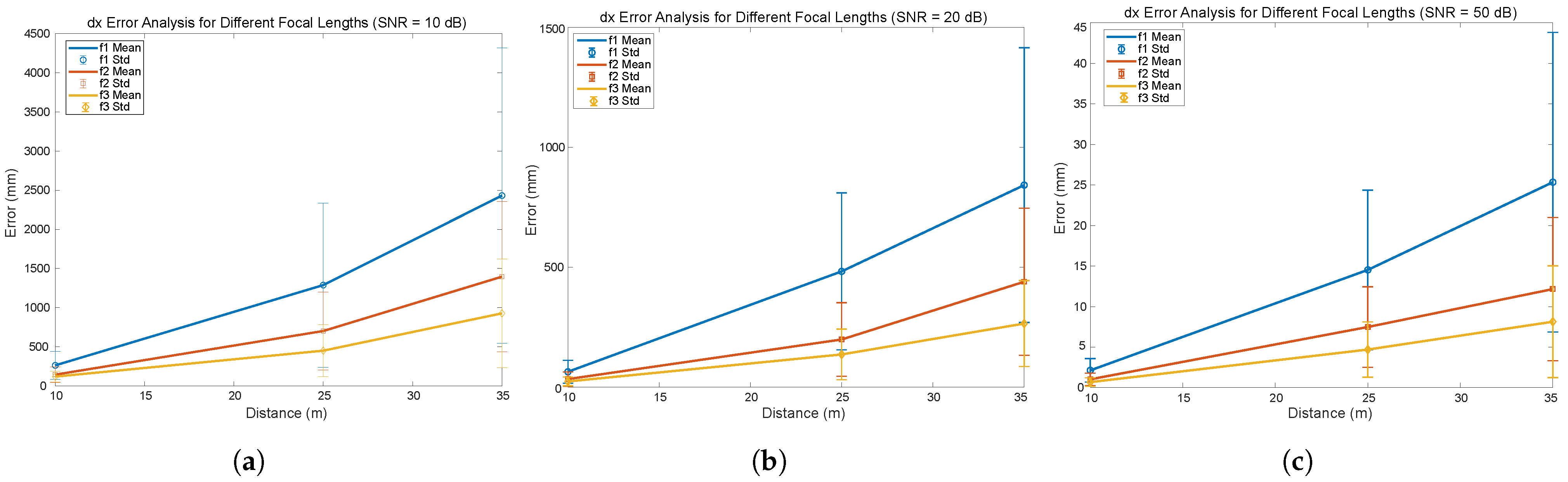
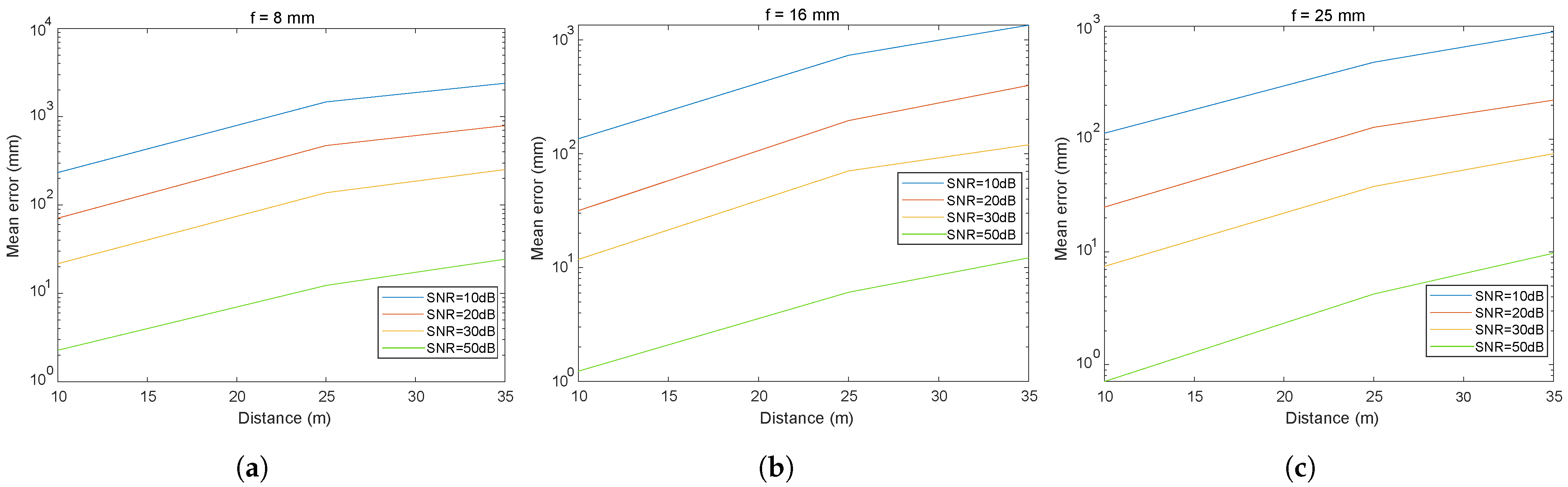
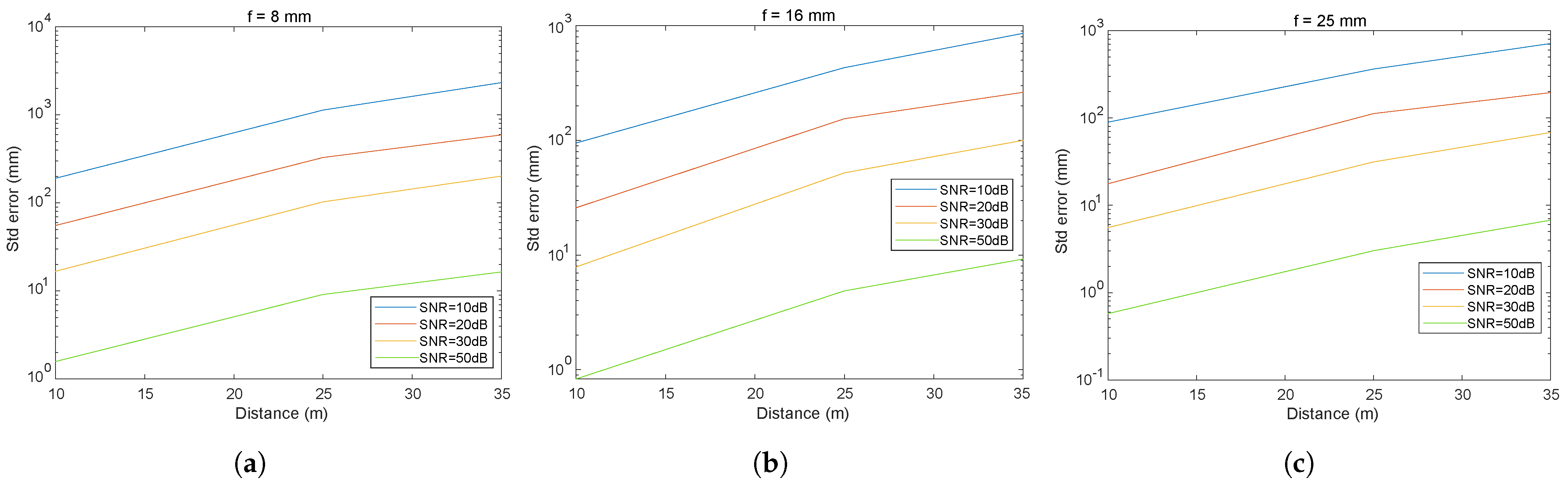
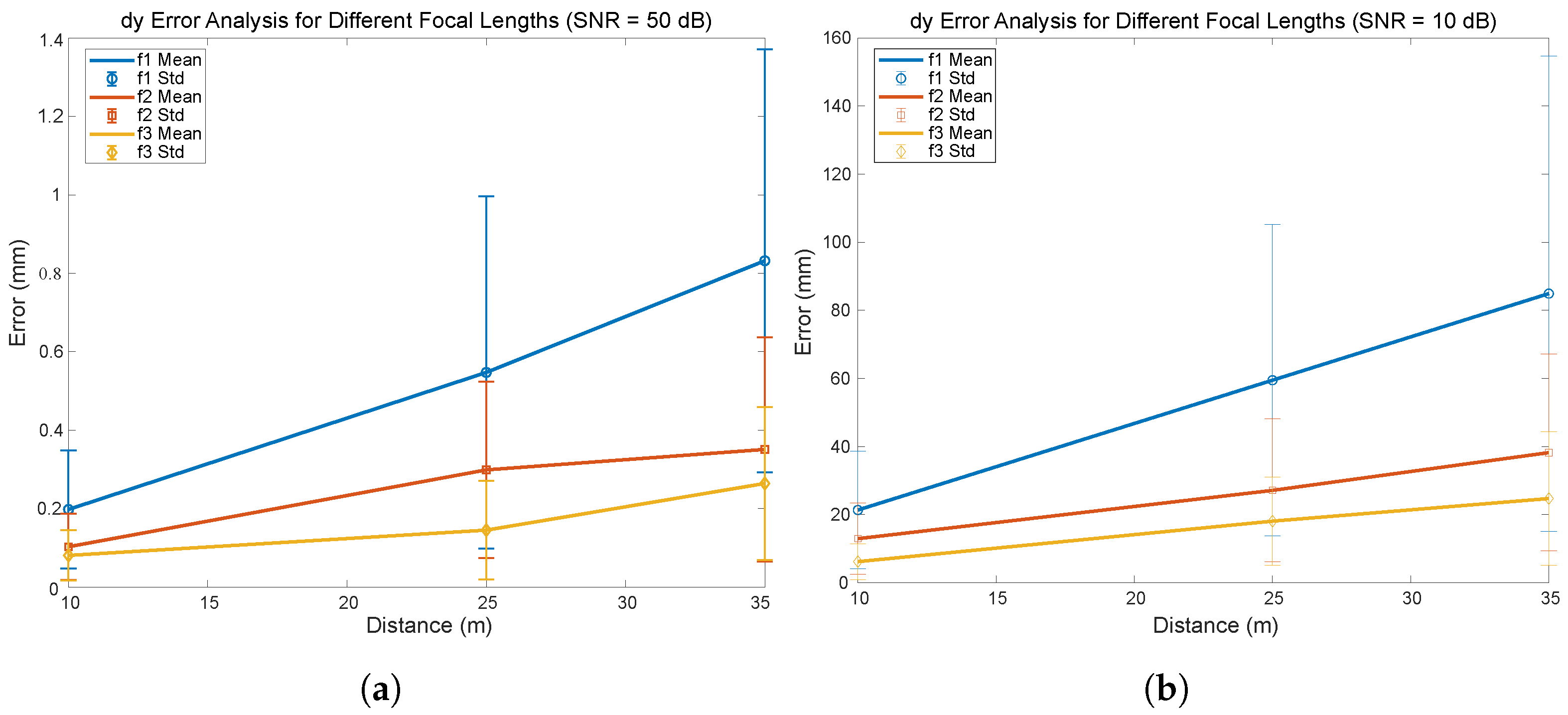
5.2.3. Influence of Focal Length and SNR on the Error in Distance Estimation
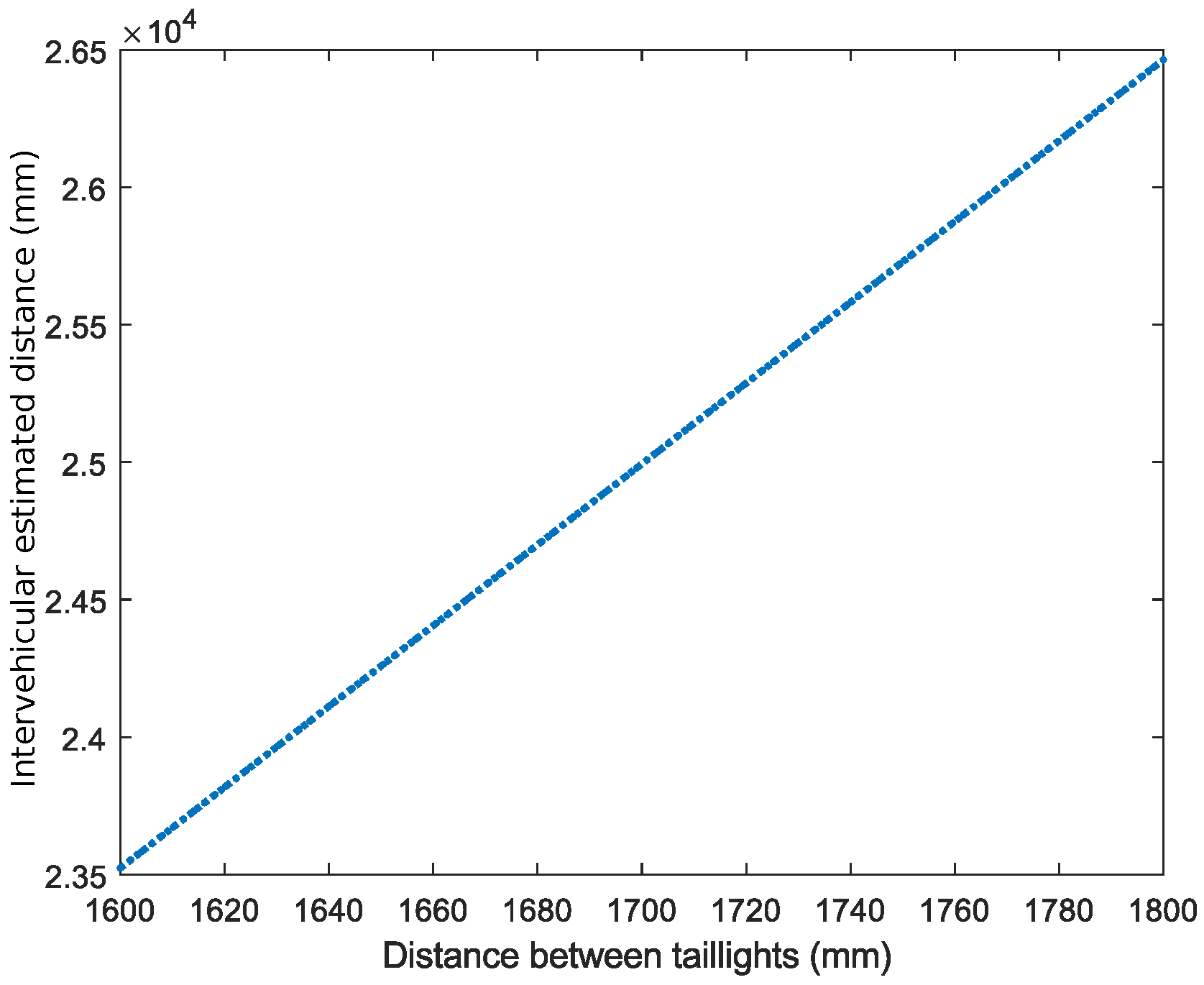
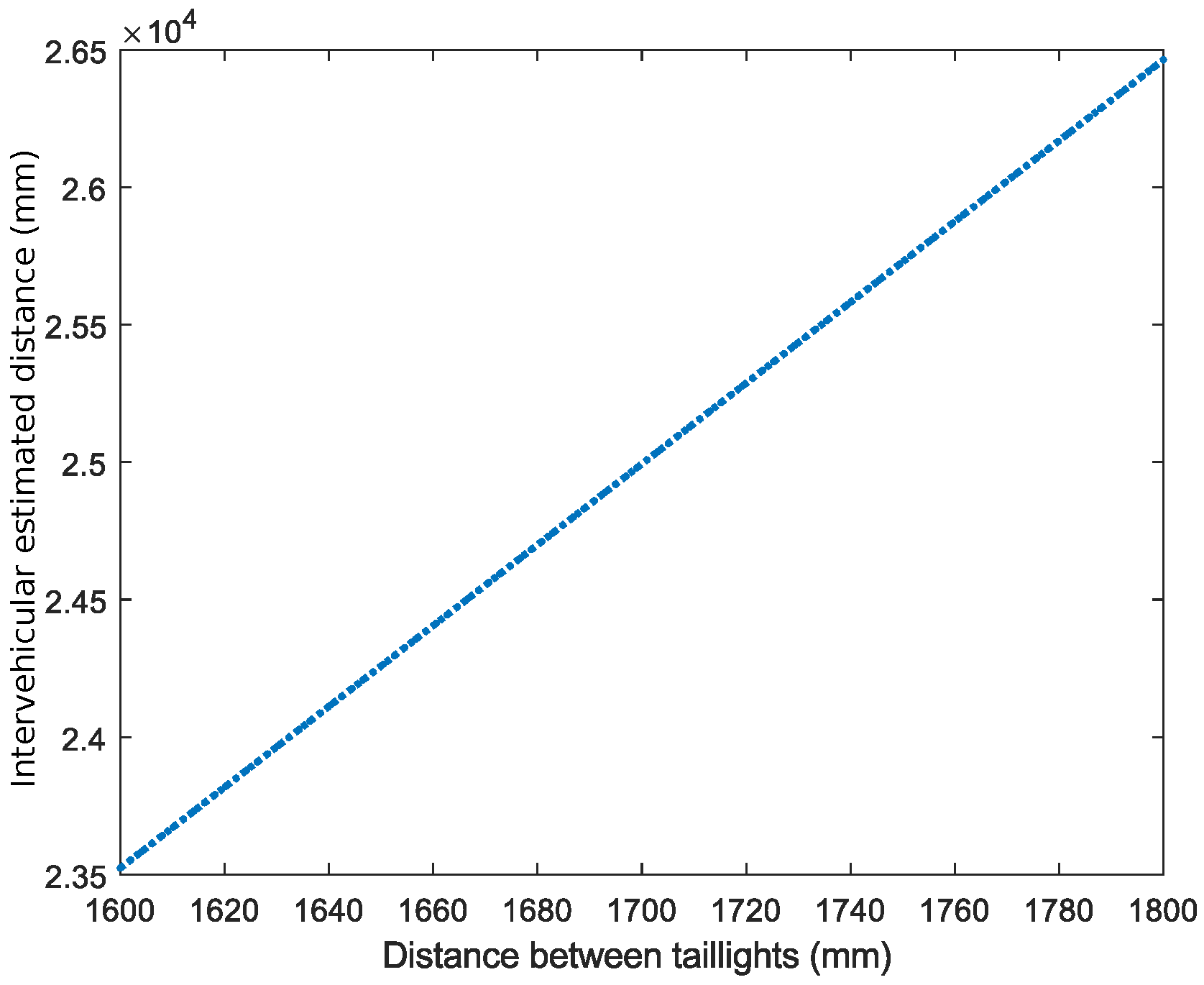
5.2.4. Impact of Distance between Transmitters on Inter-Vehicular Distance Estimation
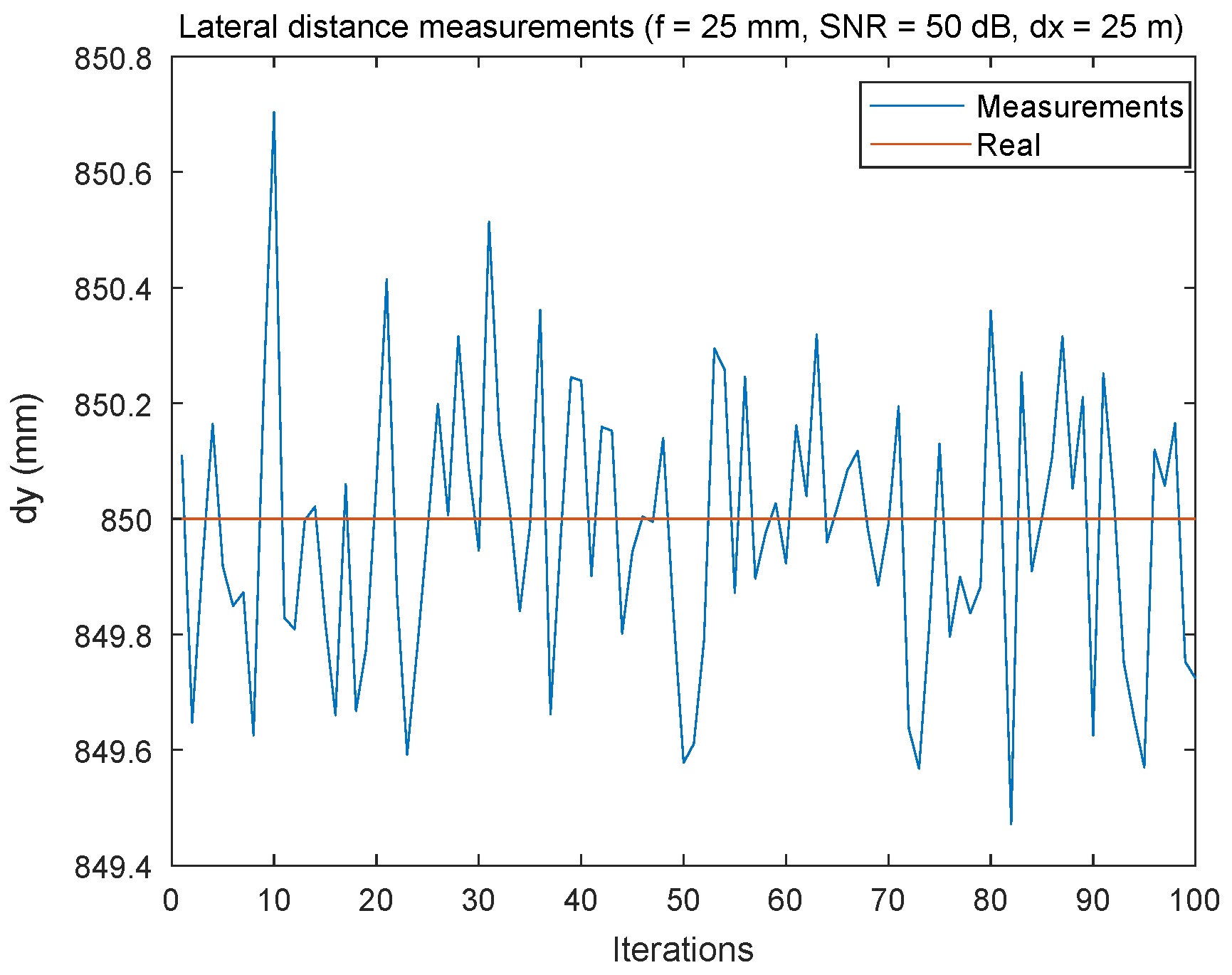
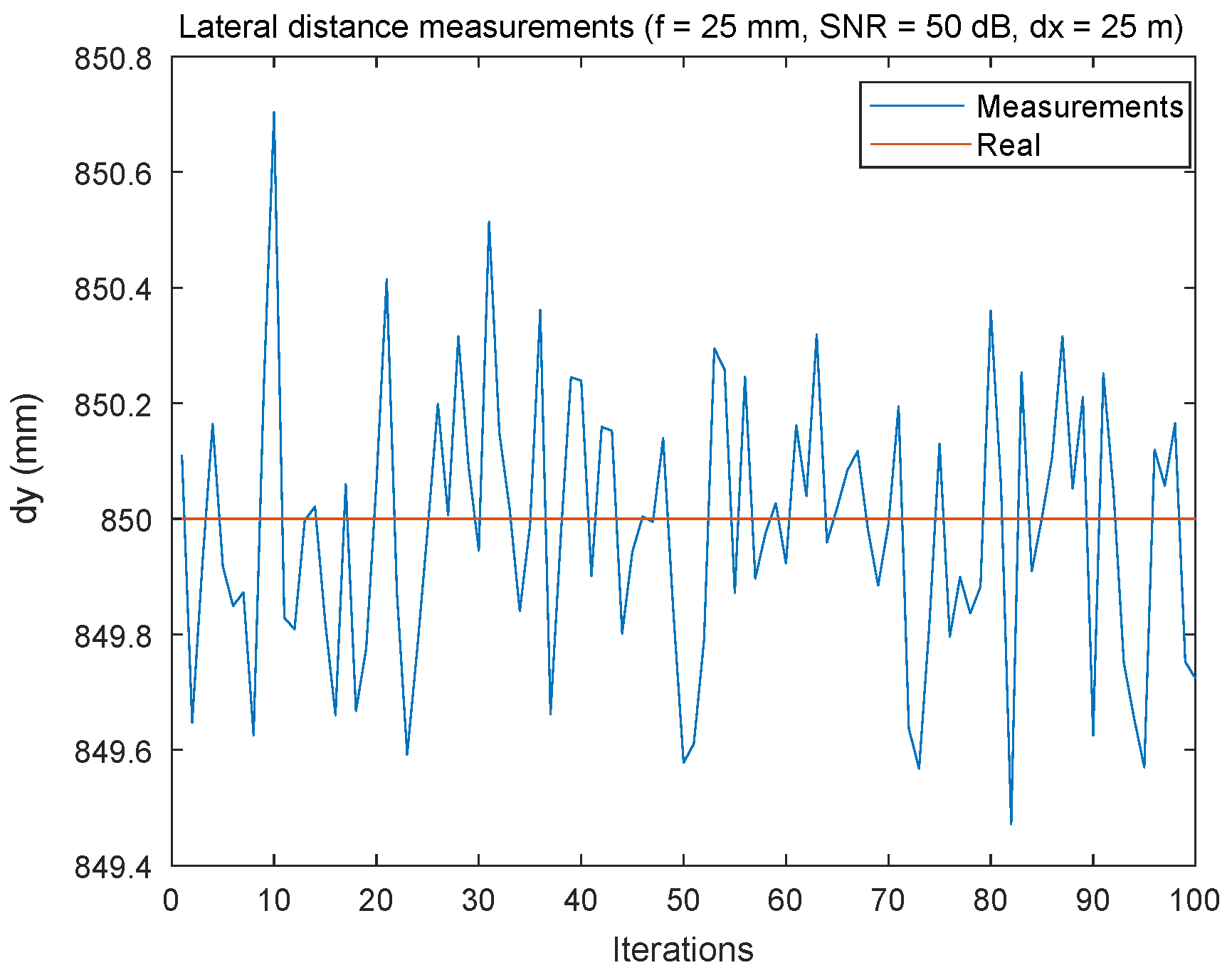
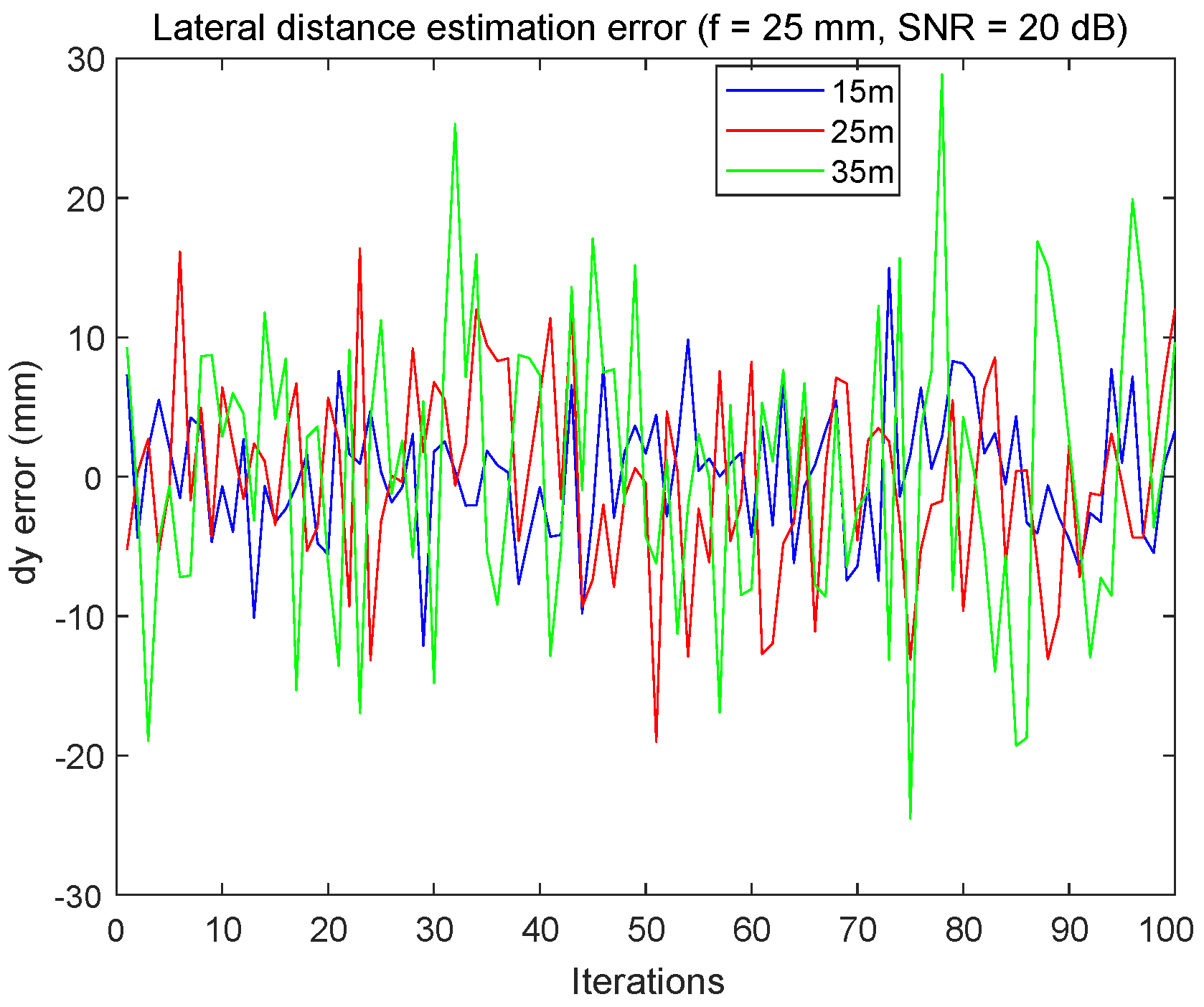
5.2.5. Lateral Distance Estimation
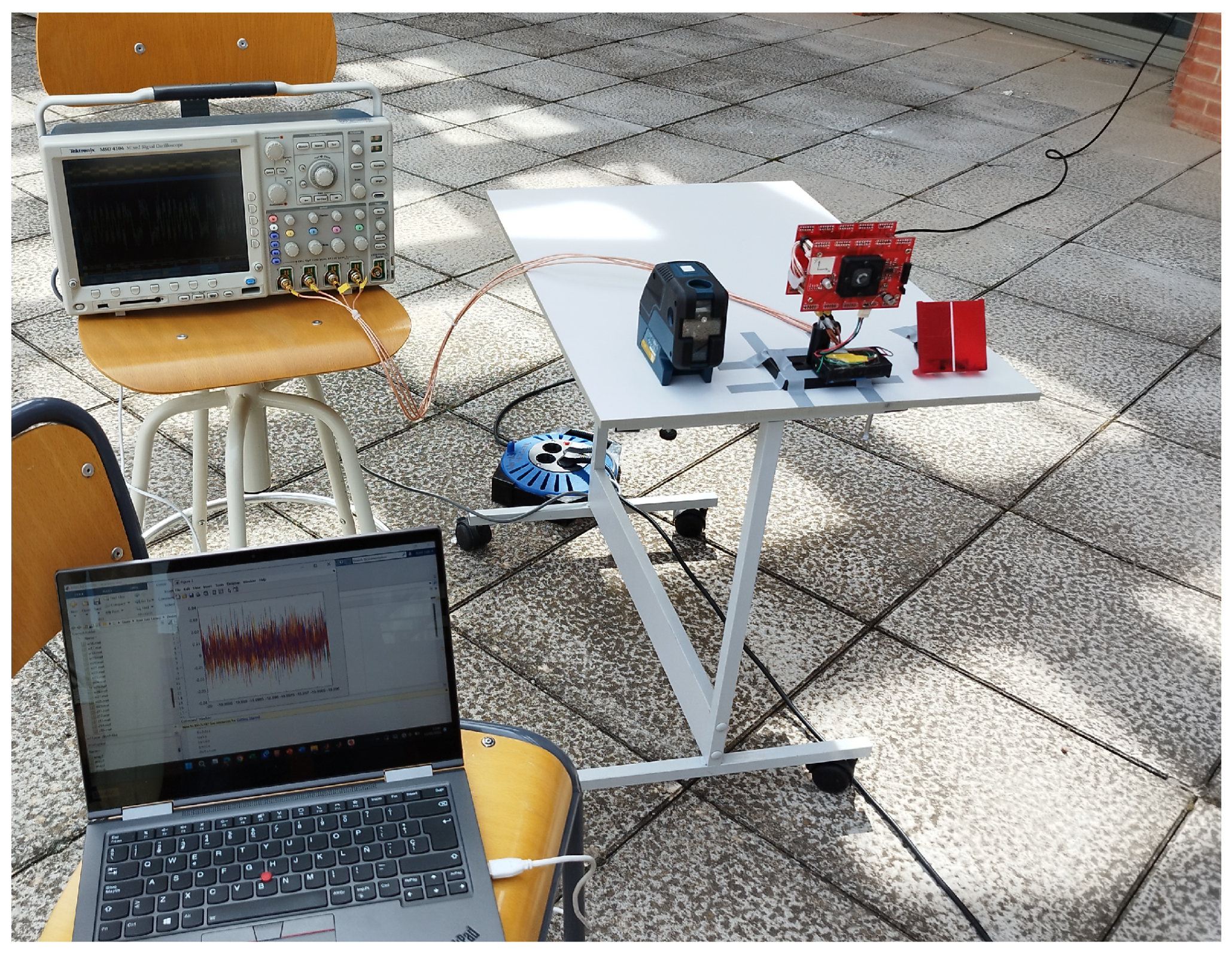
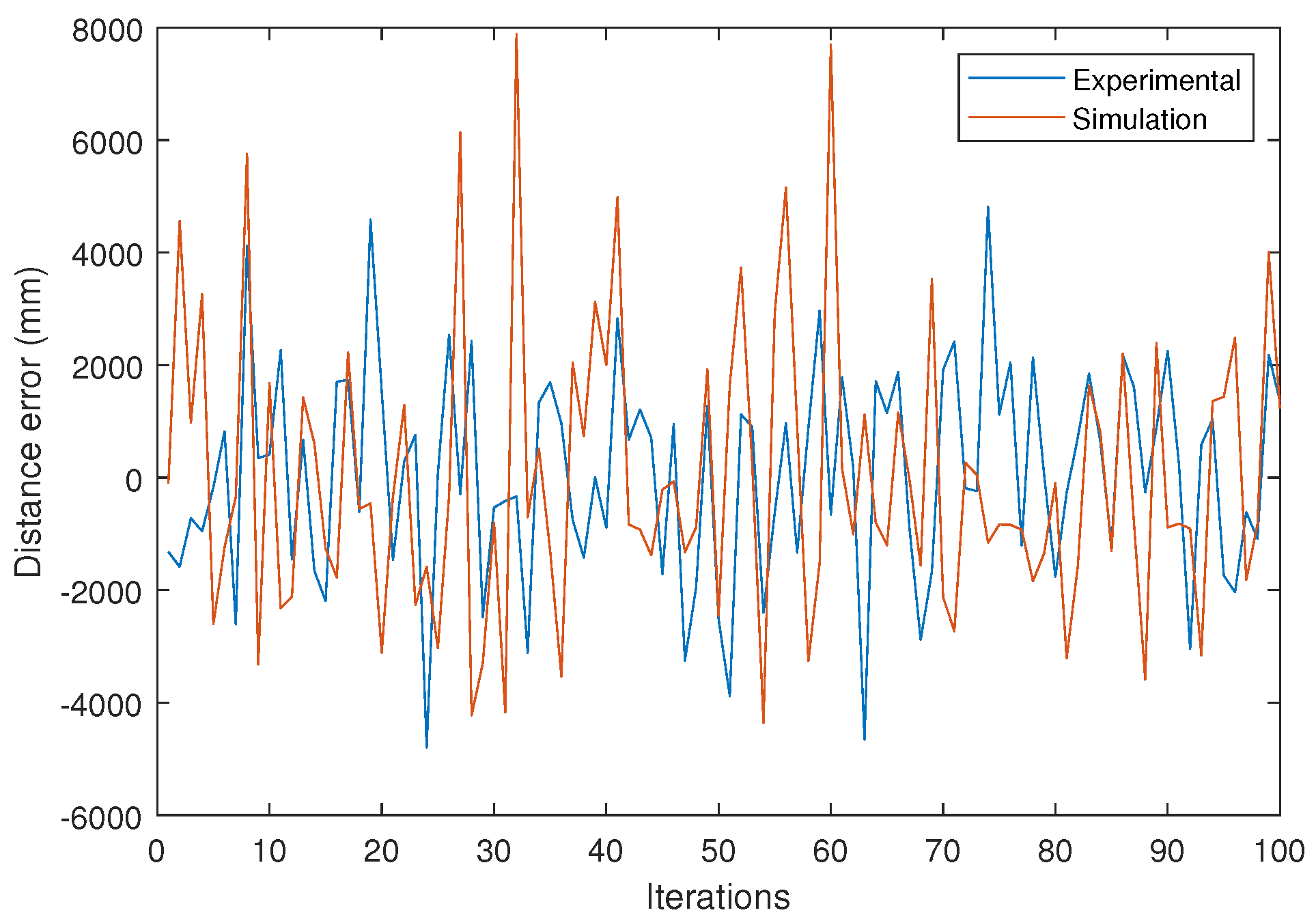
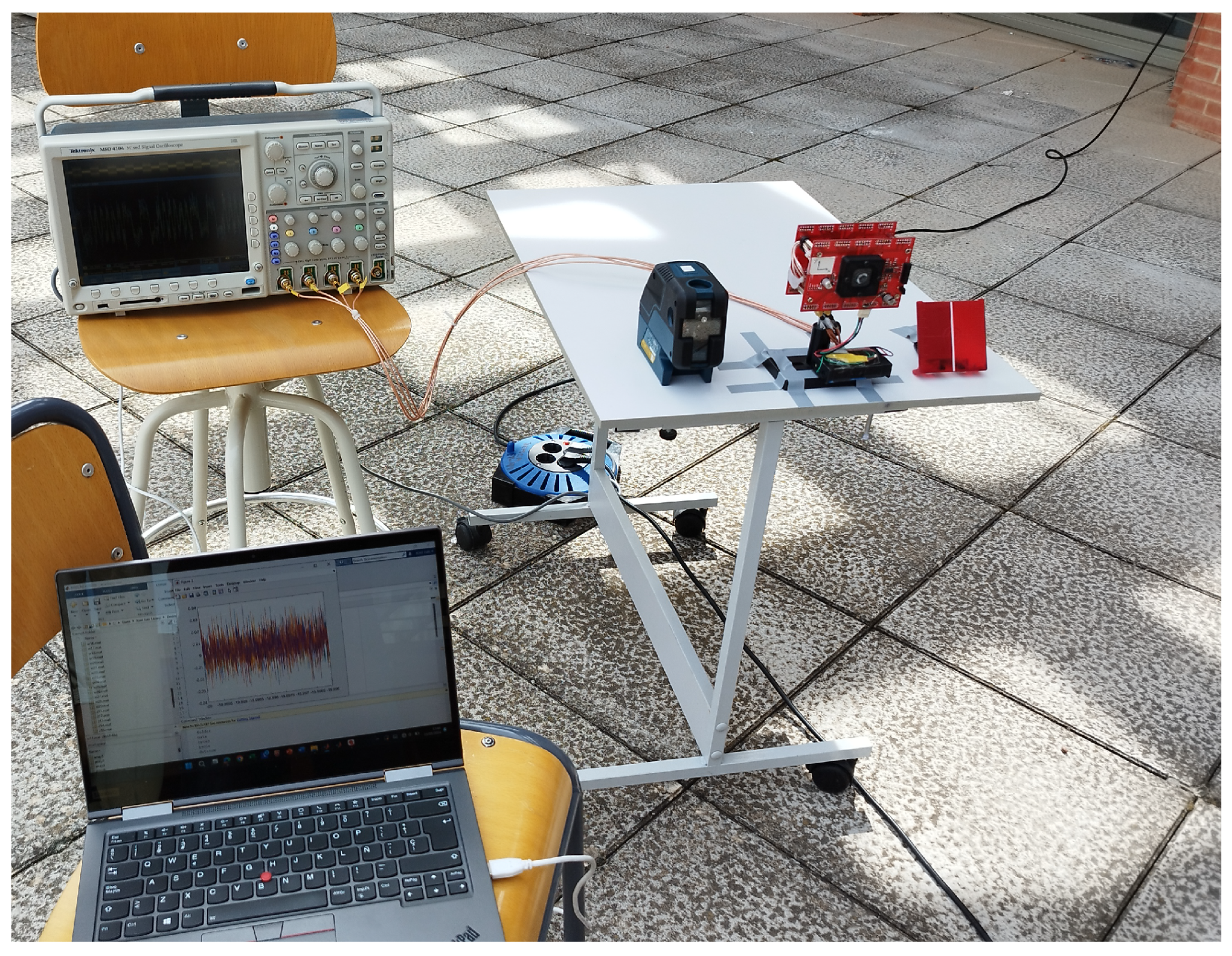
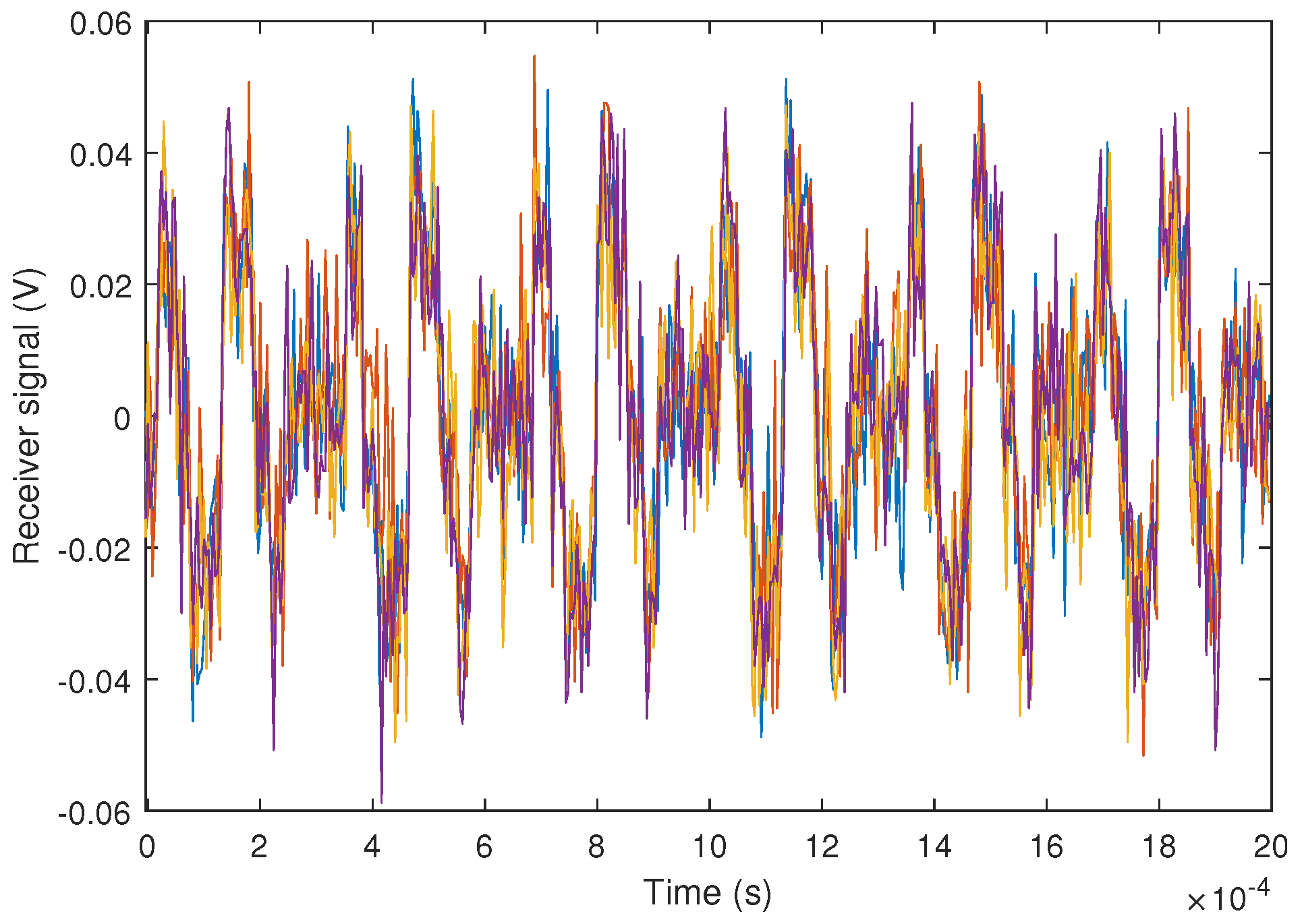
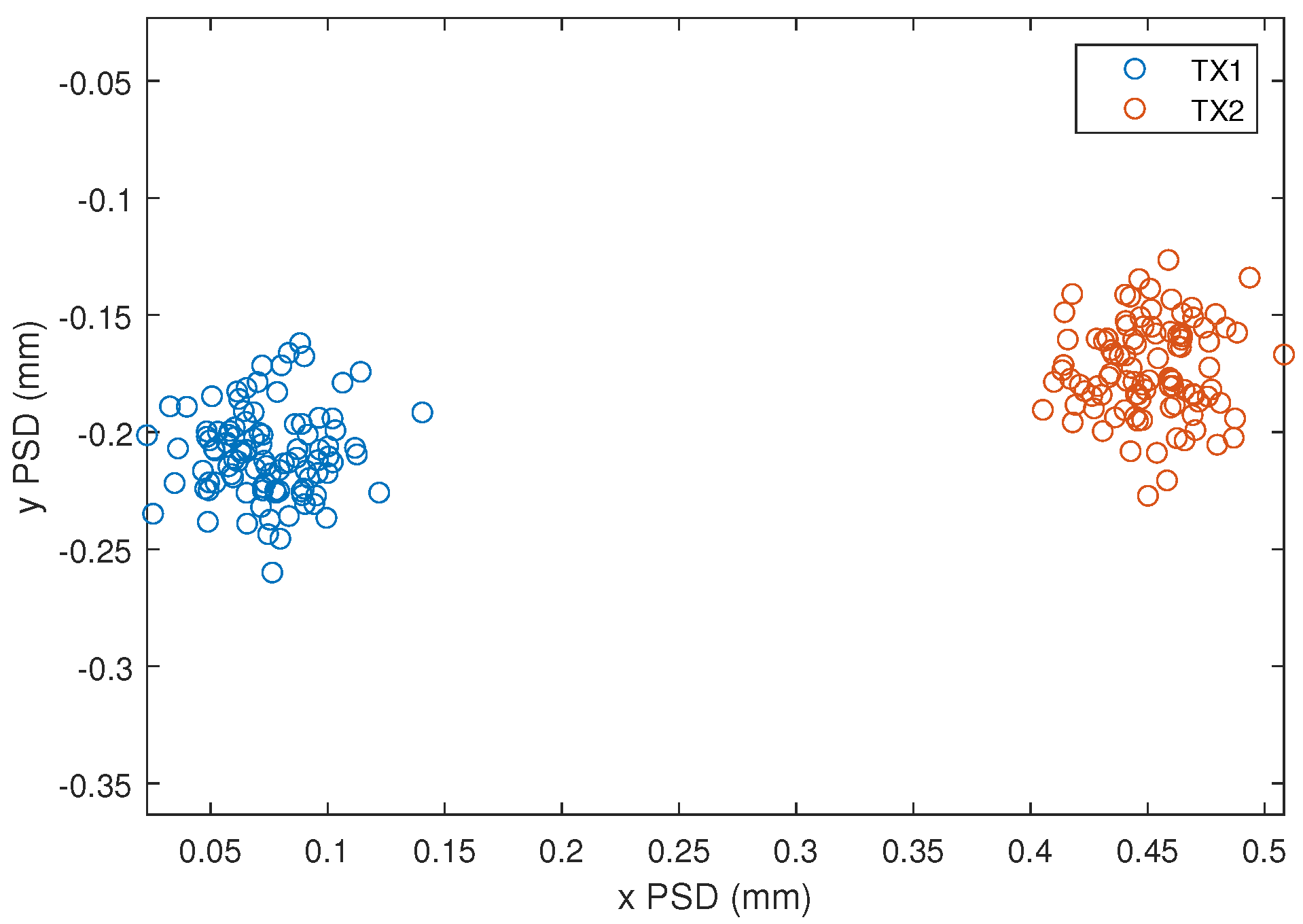
5.3. Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AOA | Angle of Arrival |
| LOS | Line of Sight |
| FoV | Field of View |
| FDMA | Frequency Division Multiple Access |
| SNR | Signal-to-Noise Ratio |
| std | Standard Deviation |
| LED | Light Emitting Diode |
| PSD | Position Sensitive Device |
| VLC | Visible Light Communication |
| VVLP | Vehicular Visible Light positioning |
| V2V | Vehicle-to-Vehicle |
References
- Williams, N.; Barth, M. A Qualitative Analysis of Vehicle Positioning Requirements for Connected Vehicle Applications. IEEE Intell. Transp. Syst. Mag. 2021, 13, 225–242. [Google Scholar] [CrossRef]
- Zhu, Z.; Guo, C.; Bao, R.; Chen, M.; Saad, W.; Yang, Y. Positioning Using Visible Light Communications: A Perspective Arcs Approach. IEEE Trans. Wirel. Commun. 2023, 22, 6962–6977. [Google Scholar] [CrossRef]
- Rehman, S.U.; Ullah, S.; Chong, P.H.J.; Yongchareon, S.; Komosny, D. Visible Light Communication: A System Perspective—Overview and Challenges. Sensors 2019, 19, 1153. [Google Scholar] [CrossRef]
- Memedi, A.; Dressler, F. Vehicular Visible Light Communications: A Survey. IEEE Commun. Surv. Tutorials 2021, 23, 161–181. [Google Scholar] [CrossRef]
- Quy, V.K.; Nam, V.H.; Linh, D.M.; Ban, N.T.; Han, N.D. Communication Solutions for Vehicle Ad-hoc Network in Smart Cities Environment: A Comprehensive Survey. Wirel. Pers. Commun. 2022, 122, 2791–2815. [Google Scholar] [CrossRef]
- Chi, N.; Zhou, Y.; Wei, Y.; Hu, F. Visible Light Communication in 6G: Advances, Challenges, and Prospects. IEEE Veh. Technol. Mag. 2020, 15, 93–102. [Google Scholar] [CrossRef]
- He, J.; Tang, K.; He, J.; Shi, J. Effective vehicle-to-vehicle positioning method using monocular camera based on VLC. Opt. Express 2020, 28, 4433. [Google Scholar] [CrossRef] [PubMed]
- Yu, S.H.; Shih, O.; Tsai, H.M.; Wisitpongphan, N.; Roberts, R.D. Smart automotive lighting for vehicle safety. IEEE Commun. Mag. 2013, 51, 50–59. [Google Scholar] [CrossRef]
- Raissouni, F.Z.; Cherkaoui, A.; Galilea, J.L.L.A.; Vicente, A.G. Performance metrics for vehicular visible light communication systems. ITM Web Conf. 2022, 48, 01014. [Google Scholar] [CrossRef]
- De-La-Llana-Calvo, A.; Salido-Monz ú, D.; L ázaro Galilea, J.L.; Gardel-Vicente, A.; Bravo-Muñoz, I.; Rubiano-Muriel, B. Accuracy and Precision Assessment of AoA-Based Indoor Positioning Systems Using Infrastructure Lighting and a Position-Sensitive Detector. Sensors 2020, 20, 5359. [Google Scholar] [CrossRef]
- Cailean, A.M.; Dimian, M. Impact of IEEE 802.15.7 Standard on Visible Light Communications Usage in Automotive Applications. IEEE Commun. Mag. 2017, 55, 169–175. [Google Scholar] [CrossRef]
- De-La-Llana-Calvo, A.; Lazaro-Galilea, J.L.; Gardel-Vicente, A.; Rodriguez-Navarro, D.; Rubiano-Muriel, B.; Bravo-Munoz, I. Analysis of Multiple-Access Discrimination Techniques for the Development of a PSD-Based VLP System. Sensors 2020, 20, 1717. [Google Scholar] [CrossRef] [PubMed]
- Bai, B.; Chen, G.; Xu, Z.; Fan, Y. Visible Light Positioning Based on LED Traffic Light and Photodiode. In Proceedings of the 2011 IEEE Vehicular Technology Conference (VTC Fall), San Francisco, CA, USA, 5–8 September 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Roberts, R.; Gopalakrishnan, P.; Rathi, S. Visible light positioning: Automotive use case. In Proceedings of the 2010 IEEE Vehicular Networking Conference, Jersey City, NJ, USA, 13–15 December 2010; pp. 309–314. [Google Scholar] [CrossRef]
- Béchadergue, B.; Chassagne, L.; Guan, H. A visible light-based system for automotive relative positioning. In Proceedings of the 2017 IEEE SENSORS, Glasgow, UK, 29 October–1 November 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Béchadergue, B. Visible Light Range-Finding and Communication Using the Automotive LED Lighting. Ph.D. Thesis, Université Paris Saclay, Gif-sur-Yvette, France, 2017. [Google Scholar]
- Keskin, M.F.; Sezer, A.D.; Gezici, S. Localization via Visible Light Systems. Proc. IEEE 2018, 106, 1063–1088. [Google Scholar] [CrossRef]
- Soner, B.; Coleri, S. Visible Light Communication Based Vehicle Localization for Collision Avoidance and Platooning. IEEE Trans. Veh. Technol. 2021, 70, 2167–2180. [Google Scholar] [CrossRef]
- Soner, B.; Ergen, S.C. Vehicular Visible Light Positioning with a Single Receiver. In Proceedings of the 2019 IEEE 30th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Istanbul, Turkey, 8–11 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- He, J.; Zhou, B. Vehicle positioning scheme based on visible light communication using a CMOS camera. Opt. Express 2021, 29, 27278–27290. [Google Scholar] [CrossRef] [PubMed]
- Do, T.H.; Yoo, M. Visible light communication based vehicle positioning using LED street light and rolling shutter CMOS sensors. Opt. Commun. 2018, 407, 112–126. [Google Scholar] [CrossRef]
- Zhang, P.; Liu, J.; Yang, H.; Yu, L. Position Measurement of Laser Center by Using 2-D PSD and Fixed-Axis Rotating Device. IEEE Access 2019, 7, 140319–140327. [Google Scholar] [CrossRef]
- Rodríguez-Navarro, D.; L ázaro Galilea, J.L.; Bravo-Muñoz, I.; Gardel-Vicente, A.; Domingo-Perez, F.; Tsirigotis, G. Mathematical Model and Calibration Procedure of a PSD Sensor Used in Local Positioning Systems. Sensors 2016, 16, 1484. [Google Scholar] [CrossRef] [PubMed]
- Ivan, I.A.; Ardeleanu, M.; Laurent, G.J. High Dynamics and Precision Optical Measurement Using a Position Sensitive Detector (PSD) in Reflection-Mode: Application to 2D Object Tracking over a Smart Surface. Sensors 2012, 12, 16771–16784. [Google Scholar] [CrossRef]
- Céspedes, M.M.; Guzmán, B.G.; Gil Jiménez, V.P.; Armada, A.G. Aligning the Light for Vehicular Visible Light Communications: High Data Rate and Low-Latency Vehicular Visible Light Communications Implementing Blind Interference Alignment. IEEE Veh. Technol. Mag. 2023, 18, 59–69. [Google Scholar] [CrossRef]
- Rodríguez-Navarro, D.; L ázaro Galilea, J.L.; Bravo-Muñoz, I.; Gardel-Vicente, A.; Tsirigotis, G. Analysis and Calibration of Sources of Electronic Error in PSD Sensor Response. Sensors 2016, 16, 619. [Google Scholar] [CrossRef] [PubMed]
- United Nations Economic Commission for Europe Vehicle Regulations, Reg. 112-Rev.3, UN, Rep. no. 9789241565684, January 2013. Available online: https://www.unece.org/fleadmin/DAM/trans/main/wp29/wp29regs/2013/R112r3e.pdf (accessed on 2 April 2024).
- Aly, B.; Elamassie, M.; Uysal, M. Vehicular Visible Light Communication With Low Beam Transmitters in the Presence of Vertical Oscillation. IEEE Trans. Veh. Technol. 2023, 72, 9692–9703. [Google Scholar] [CrossRef]
- Shladover, S.E.; Tan, S.K. Analysis of Vehicle Positioning Accuracy Requirements for Communication-Based Cooperative Collision Warning. J. Intell. Transp. Syst. 2006, 10, 131–140. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| SNR | 20 dB, 50 dB |
| Focal length | 8 mm, 16 mm, 25 mm |
| Modulation | FDMA |
| Frequency rate | 1 MHz |
| Iteration number | 100 |
| Communication distance | 15–35 m |
| Pt | 15 W |
| w | 1.7 ± 0.1 m |
| Receiver active area | m2 |
| Processing time | 0.04 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Raissouni, F.Z.; De-La-Llana-Calvo, Á.; Lázaro-Galilea, J.L.; Gardel-Vicente, A.; Cherkaoui, A.; Bravo-Muñoz, I. Vehicular Visible Light Positioning System Based on a PSD Detector. Sensors 2024, 24, 2320. https://doi.org/10.3390/s24072320
Raissouni FZ, De-La-Llana-Calvo Á, Lázaro-Galilea JL, Gardel-Vicente A, Cherkaoui A, Bravo-Muñoz I. Vehicular Visible Light Positioning System Based on a PSD Detector. Sensors. 2024; 24(7):2320. https://doi.org/10.3390/s24072320
Chicago/Turabian StyleRaissouni, Fatima Zahra, Álvaro De-La-Llana-Calvo, José Luis Lázaro-Galilea, Alfredo Gardel-Vicente, Abdeljabbar Cherkaoui, and Ignacio Bravo-Muñoz. 2024. "Vehicular Visible Light Positioning System Based on a PSD Detector" Sensors 24, no. 7: 2320. https://doi.org/10.3390/s24072320
APA StyleRaissouni, F. Z., De-La-Llana-Calvo, Á., Lázaro-Galilea, J. L., Gardel-Vicente, A., Cherkaoui, A., & Bravo-Muñoz, I. (2024). Vehicular Visible Light Positioning System Based on a PSD Detector. Sensors, 24(7), 2320. https://doi.org/10.3390/s24072320