1. Introduction
The increasing adoption of Low-Power and Lossy Networks (LLNs) as a leading class of Internet-of-Things (IoT) communication technologies has led to a high density of wireless nodes in the already congested unlicensed industrial, scientific, and medical (ISM) bands. LLNs are typically composed of battery-operated and resource-constrained devices connected via a mesh network over unreliable links. For LLNs, the
Internet Engineering Task Force (IETF) has proposed a protocol stack consisting of the Routing Protocol for LLNs (RPL) [
1] and
IPv6 over Low-Power Wireless Personal Area Networks (6LoWPAN) [
2]. RPL targets scaling to thousands of IP-connected devices, to fulfill the vision of IoT. Modern IoT applications not only require the scalability and lightweight operation that RPL provides but may also impose a heavy traffic load and dense deployments. e.g., habitat monitoring [
3], underground mining [
4], and smart grids [
5].
However, this protocol stack shows degraded performance when subjected to high traffic or a dense topology [
6]. In such cases, RPL solicits information from other possible parents and switches to another parent. Parent switching might not always enhance the network performance, particularly in densely deployed networks, since the potential parents may also perform poorly.
One reason is that in RPL networks, the predominant choice is to set the transmission power to the maximum for all the nodes to simplify the operation of the protocol. Alternatively, the wireless nodes can adjust their transmission power to increase spatial reuse in the network consequently improving the quality of service under dense and heavy traffic scenarios. First, it may increase channel contention and reduce spatial reuse in the channel. Consequently, nodes waste their limited energy due to (i) unnecessary large values of transmission power and (ii) the re-transmission of packets due to collision with other nodes. On the other hand, radically reducing the transmission power may compromise the network connectivity since receivers may experience a lower Signal-to-Noise Ratio (SNR) [
7].
Commercially available off-the-shelf (COTS) radios provide metrics such as the
Receiver Signal Strength Indicator (RSSI) and
Link Quality Indicator (LQI). These metrics provide an instantaneous metric to decide on the transmission power but are volatile in nature and not very accurate for the long-term estimation of wireless link quality [
8,
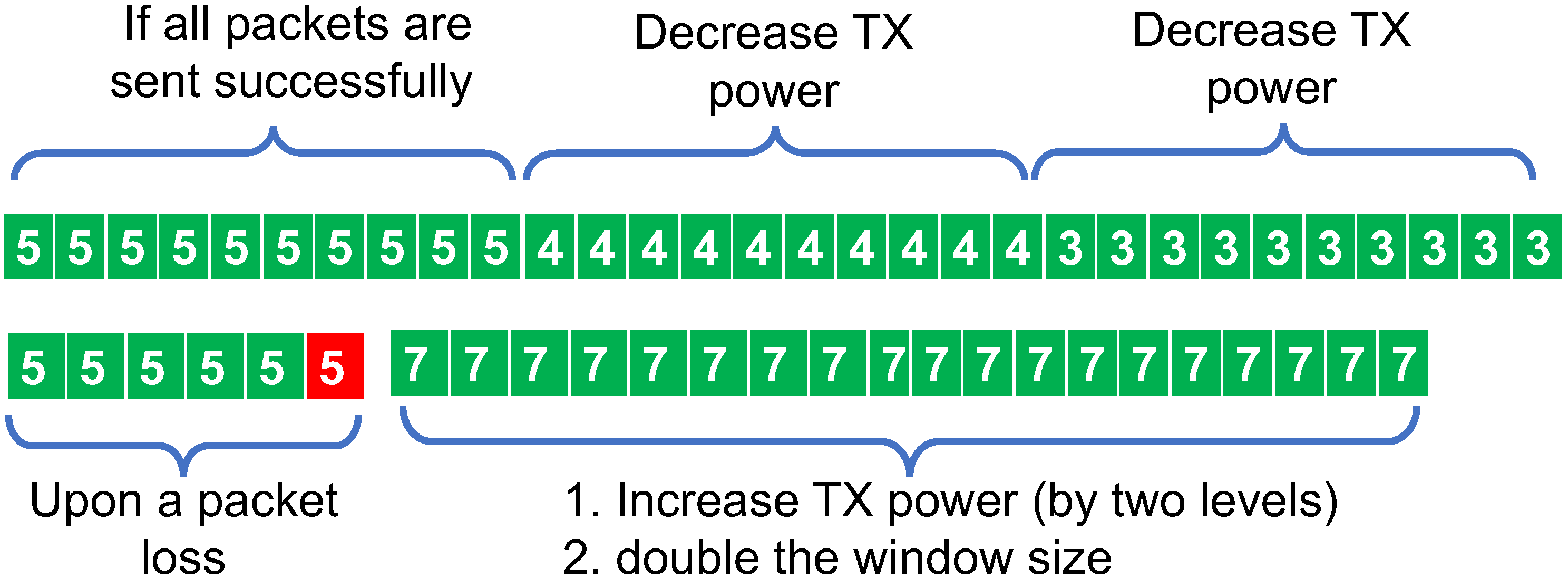
9]. That is why accurate methods require nodes to probe different transmission power settings continuously, which implies severe overhead to the network. Moreover, adding extra control traffic escalates congestion, which is the underlying cause of packet loss and delay. By passively measuring the delivery rate of various settings, node can infer the link quality without requiring additional control traffic. Passive probing can be costly if it is not performed properly, as nodes may sacrifice some data packets by reducing the transmission power for the sake of exploring the opportunity. Some existing works probe different transmission powers using simple algorithms without providing a theoretical background on convergence to the optimal setting. For instance, window-based protocols [
10] assume they have found the best transmission power if they successfully transmit a certain number of packets. Our preliminary study shows that, even in a simple two-node scenario, this assumption is unrealistic. In such settings, these algorithms might not select the optimal transmission power or converge very slowly.
An intelligent exploration strategy is required to ensure the probing of different settings is performed faster and is guaranteed to converge. We resorted to the exploration–exploitation dilemma in the Multi-Armed Bandit framework and UCB algorithm to optimize the probing of the transmission power settings. Multi-Armed Bandits are a class of reinforcement algorithms in which a single-state agent has no prior knowledge of the rewards. In this framework, each node simultaneously learns and optimizes its rewards.
We present Adaptive Control of Transmission Power for RPL (ACTOR), which includes a set of methods that extend RPL to adapt transmission power settings based on bandit theory. ACTOR aims to increase the throughput while minimizing the transmission power in dense and high-traffic LLNs. This also has the potential to preserve energy in the batteries through spatial reuse and lower internal interference.
ACTOR takes advantage of the routing information in the transmission power control. The reliable communication of nodes in a multi-hop network hinges on the parents to relay the traffic. When a parent node reduces its transmission power, it is not supposed to jeopardize communications with its children. In ACTOR, children inform their preferred parent of their expected transmission power settings so the parents do not abandon their children. To further accelerate the convergence of the learning process, ACTOR also employs a blacklisting mechanism to filter out transmission power settings that are too unreliable. Importantly, ACTOR is backward-compatible with the RPL protocol and easy to implement in COTS devices with minimal overhead.
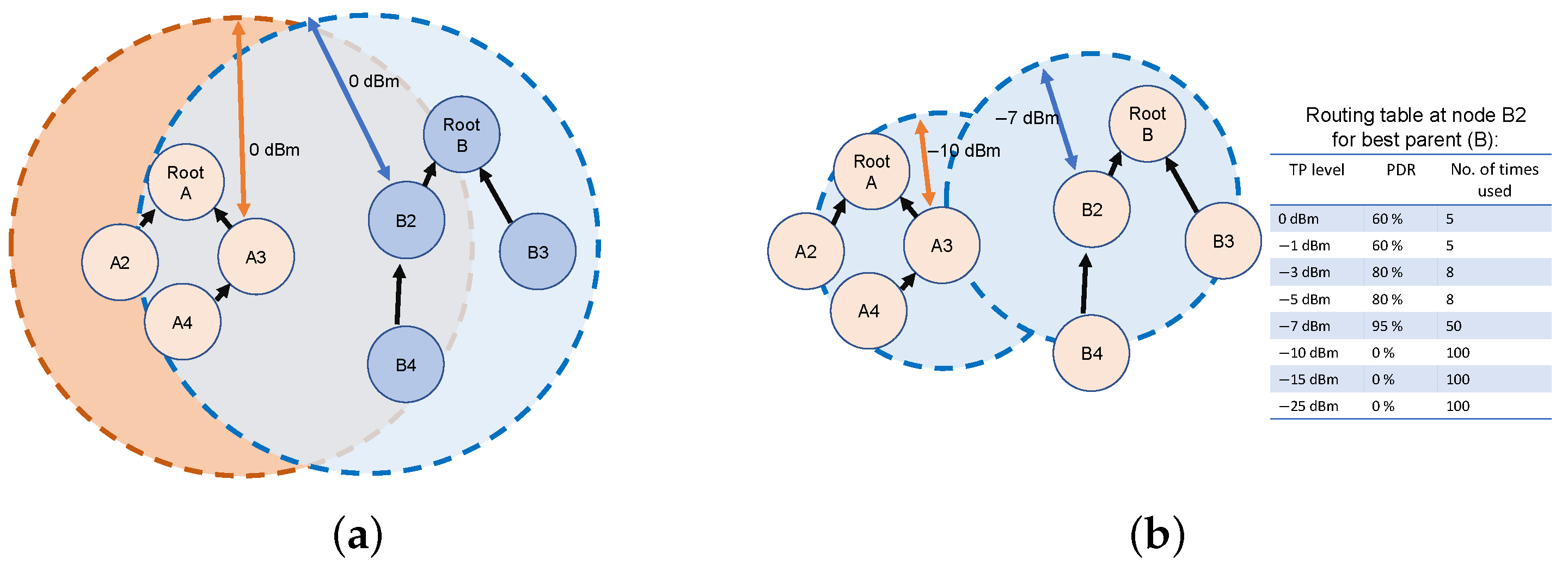
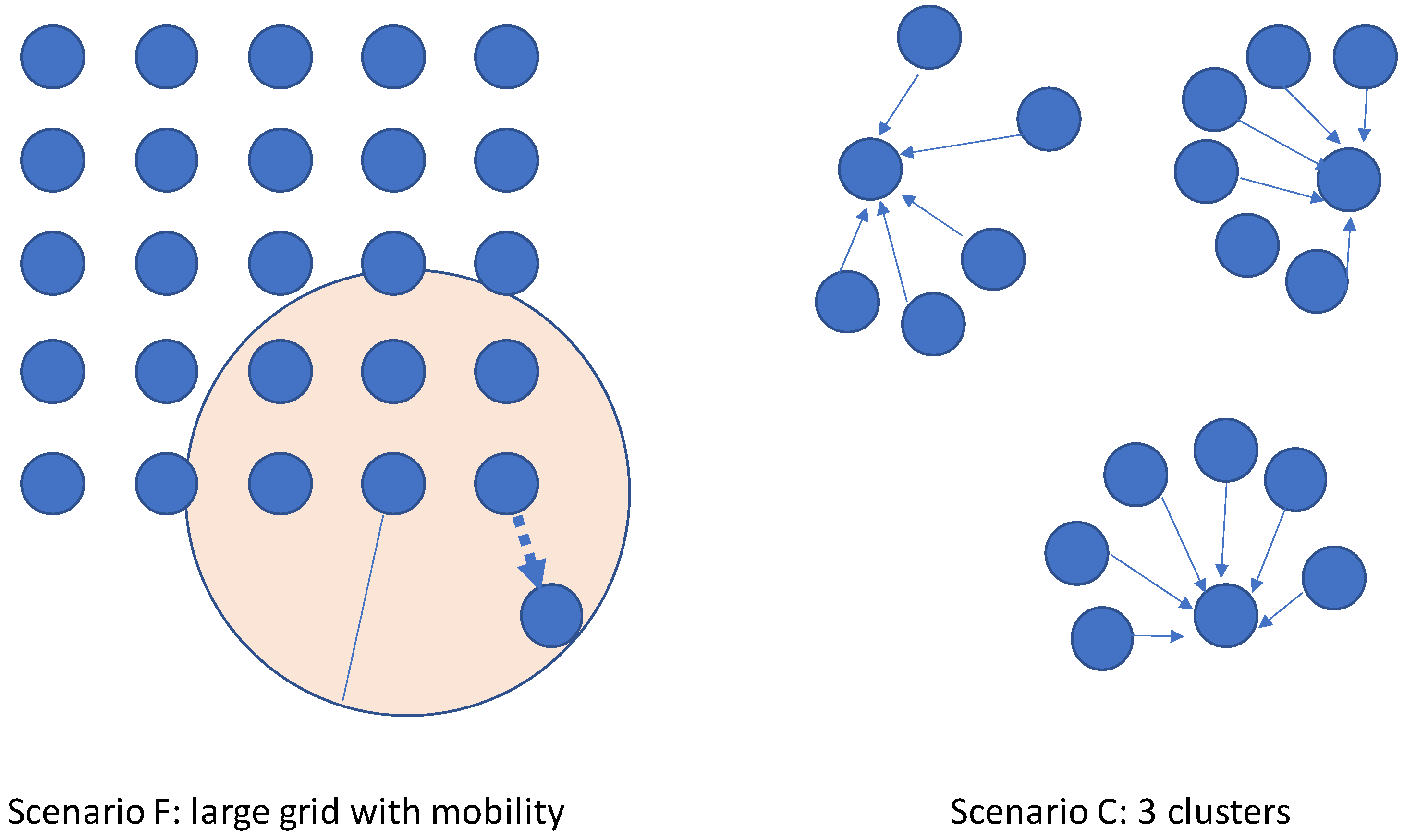
Transmission power control is advantageous in many scenarios. In a multiple-cluster network, ACTOR is beneficial since it allows the clusters to limit their destructive interference to a smaller region.
Figure 1 illustrates a multi-cluster topology in which the two clusters do not interfere with each other when using ACTOR (
Figure 1b). When running RPL, the transmission ranges of nodes
and
collide with a lot of nodes in the neighboring cluster (
Figure 1a). The figure also shows a sample of the table that ACTOR maintains for storing the action values and the number of times they have been explored. By using ACTOR, nodes can improve their throughput in dense or high-throughput scenarios while minimizing their energy consumption. This is achieved through optimal transmission power control, fast convergence, and keeping the topology stable.
The recent efforts in the domain of deterministic networking in the IoT have led to the standardization of the
Time Slotted Channel Hopping (TSCH) and IPv6 over TSCH (6TiSCH) framework [
11]. The benefits of increasing spatial reuse in the network are not limited to tackling the hidden terminal problem in a CSMA network. Avoiding excessive transmission power settings reduces the interference incurred to the neighboring nodes. Hence, even with the proliferation of TSCH mode in the MAC layer, the transmission power control reduces the constraints of the scheduler, allowing higher throughput.
In summary, this paper outlines the following contributions:
We experimentally analyze packet delivery ratio distribution with different transmission powers and distances for two nodes communicating with RPL, showing the need for intelligent transmission power control (
Section 4).
We formulate the problem of transmission power control in RPL using the
multi-armed bandit paradigm and propose the ACTOR mechanism with two alternative algorithms—UCB and Discounted UCB (
Section 5).
We implement and integrate the ACTOR mechanism in RPL in a way that is backward-compatible with the standard protocol using Contiki-NG, and we publish the code as open-source (
https://github.com/iliar-rabet/ACTOR, accessed on 3 April 2024 ) (
Section 5).
We evaluate and compare ACTOR performance against the default RPL and two benchmarks, both through simulations and a real testbed, showing improved reliability and energy efficiency (
Section 6).
The remainder of the paper is structured as follows:
Section 2 reviews some background regarding bandit theory and the standard RPL protocol.
Section 3 addresses the related work. In
Section 4, we analyze the upper bounds of the distribution of the PDR using different transmission power settings.
Section 5 addresses the proposed method, which is then evaluated in
Section 6. Finally, we conclude the paper in
Section 7.
2. Background
ACTOR extends the standard RPL to optimize the TP using a specific reinforcement learning algorithm named UCB. So, in this section, we first review the standard RPL and its core mechanisms. Next, we present the reasoning behind choosing the UCB algorithm among all reinforcement learning schemes.
2.1. Background on RPL
All transmissions (upward, downward, and point-to-point) in RPL happen within a set of links referred to as a Destination-Oriented Directed Acyclic Graph (DODAG). RPL nodes construct a collection of DODAGs, each rooted at a border router. For each DODAG, the root node starts the process by sending a Destination Information Object (DIO) indicating its presence. Upon receiving a DIO, nodes can start sending data to the root and set a Trickle timer to further advertise the network by sending more DIOs. Nodes also send Destination Advertisement Object (DAO) packets to the root node to enable downward traffic to be routed.
Numerous RPL extensions, both centralized [
12] and distributed [
13], have been proposed in the research community to address various challenges such as network density, mobility, and interference. While centralized approaches offer certain advantages, such as centralized control, they often introduce additional control traffic, which can be undesirable in dense networks. Therefore, to mitigate these concerns, ACTOR proposes enhancements to the standard in a distributed manner.
RPL was not initially tuned to cope with channel contention. In the event of packet loss due to high traffic, RPL tries to initiate local or global repairs by sending more DIOs, thereby further congesting the medium. Local repair refers to the scenario in which a node starts searching for a parent with no implication on the global routing state. This is triggered when the node does not have any active link toward the root node. A global repair, however, can only be initiated via the root node, and it rebuilds the whole routing graph on all the nodes from scratch. It has been shown that, under a heavy traffic load, RPL shows unstable topology maintenance, unfairness, and high routing overhead. Also, handling the hidden terminal problem is flawed since nodes do not use their capacity to adapt their transmission power.
RPL nodes advertise the quality of their upward connection using an Objective Function (OF). The Objective Function 0 (OF0) and Minimum Rank with Hysteresis Objective Function (MRHOF) are well-known, famous OFs mostly used with different routing metrics, including the expected transmission count (ETX), RSSI, and nodes’ remaining energy. Among the metrics, ETX is the most commonly used, as it captures both the long-term link reliability and energy consumption. The calculation of the routing metric assumes constant transmission power in the standard RPL.
2.2. Bandit Theory
The classic
Multi-Armed Bandit problem can be formulated as follows. The agent repeatedly chooses from a set of actions (arms) with rewards that are initially unknown and observes the associated reward. In the next iterations, the agent uses the knowledge it has gained during the previous iterations. The goal of the agents is to minimize a regret function, which is mathematically formulated as the difference between actual accumulated rewards (with unknown statistics) and the optimal reward [
14]. In parallel with optimizing the accumulated reward, the agent aims to learn about the environment. The optimal policy consists of always choosing the action with the maximum expectation of reward. Intuitively, the faster an agent identifies the best action, the less regret it is likely to have.
Bounding the regret can be realized by balancing the tradeoff between exploration and exploitation. Exploration can be defined by examining arms that have not been used before. If the agents overspend their resources by excessively exploring actions, they lose long-term rewards and increase their regret. Burnetas et al. [
15] proved a lower bound for the number of times that each arm needs to be pulled to learn about the environment. This translates into an instance-independent lower bound of the regret of the agents. This lower bound is usually used as a measure to assess the robustness of an exploration policy.
Unlike the classic
-greedy, modern exploration policies such as the
Upper Confidence Bound (UCB) bring about fast convergence and optimal results. The intuition behind the UCB algorithm is based on a principle called optimism in the face of uncertainty. Agents employing this algorithm always take the action that is as large as plausibly possible. Auer et al. [
16] proved that UCB achieves sublinear regret in time, outperforming the linear regret associated with
-greedy and matching the lower bound achieved by Burnetas [
15].
Depending on how the problem is formulated, bandit theory proposes different solutions and methods, including non-stationary bandits, adversarial bandits, and contextual bandits. Non-stationary bandits can be applied when the distribution governing rewards is dynamic. Secondly, for the adversarial version, the distributions not only are non-stationary, but also, an adversary is trying to work against the agent by reducing the rewards. The algorithms that are designed for these classes of problems are Discounted UCB and EXP3, respectively. For the contextual bandits, the agent associates one model to each context, and when it detects the context, it uses its associated model to choose the action.
2.3. Upper Confidence Bound Algorithm
In this subsection, we calculate the upper bounds for the family of UCB algorithms, which is a delicate matter. These bounds are typically derived using a statistical theory called concentration of measure. In this theory, exponential tail inequalities play a central role in analyzing the tail of the distributions and, thus, finding tight upper bounds. Choosing among the variants of UCB revolves around the defined bounds and their tightness [
17]. The basic UCB algorithm relies on the concept of subgaussian random variables. For a
-subgaussian random variable, the tail decay is approximately as fast as that of a Gaussian with the same variance.
Definition 1. A random variable, X, is said to be subgaussian if it holds that In this paper, the delivery of the packets is the reward, and different transmission powers are the arms. Given that PDR is always bounded to [0, 1], one possible upper bound can be derived using the following bound:
Lemma 1. If a random variable, X, has a mean zero and , then X is -subgaussian.
Another slightly tighter bound can be obtained using
Hoeffding’s inequality, which states that X is
-subgaussian for a zero-mean [a,b]-bounded random variable, X. (For proof, see the
Appendix A.)
When it is known that the underlying distribution of rewards is
subgaussian, the relation between the probability of violating and the bound is as follows [
17]:
Assuming some values for
(usually
), we can calculate the UCB:
Building upon this upper bound, the UCB algorithm runs a simple loop which for iteration (t) consists of the following operations:
Assume
is the suboptimality gap or the immediate regret for action
i, and
is the number of times arm
a has been pulled before time
t. Then, regret,
, can be formulated as follows:
The theorem below presents an analysis of the regret when using the UCB algorithm. In the rest of this paper, by UCB algorithm, we mean UCB(
). For a regret analysis of the discounted version of UCB, please refer to [
18].
Theorem 1. Consider the UCB algorithm in a stochastic 1-subgaussian k-armed bandit problem. For any time horizon, t, when accepting an error probability of δ, then the regret, (defined in Equation (4)), is bounded by the following: This theorem ensures that the regret growth of UCB is sub-linear relative to time.
4. Preliminary Study on the Impact of Transmission Power on the Reliability of Wireless Links
This section analyzes the probability distribution of the delivery of packets. This can be considered a preliminary study that guides the selection of transmission power for ACTOR. This is essential to check the applicability of the UCB algorithms and their variants. Defining tighter upper bounds contributes to minimizing the regret of the UCB algorithm.
In this experiment, two NRF5340 nodes [
33] are positioned at specific distances within each other’s line of sight. The two nodes (one as a server and one as a client) are programmed to communicate with different transmission power levels. The client sends 200 batches of packets for each power level to sample the link quality.
In the literature [
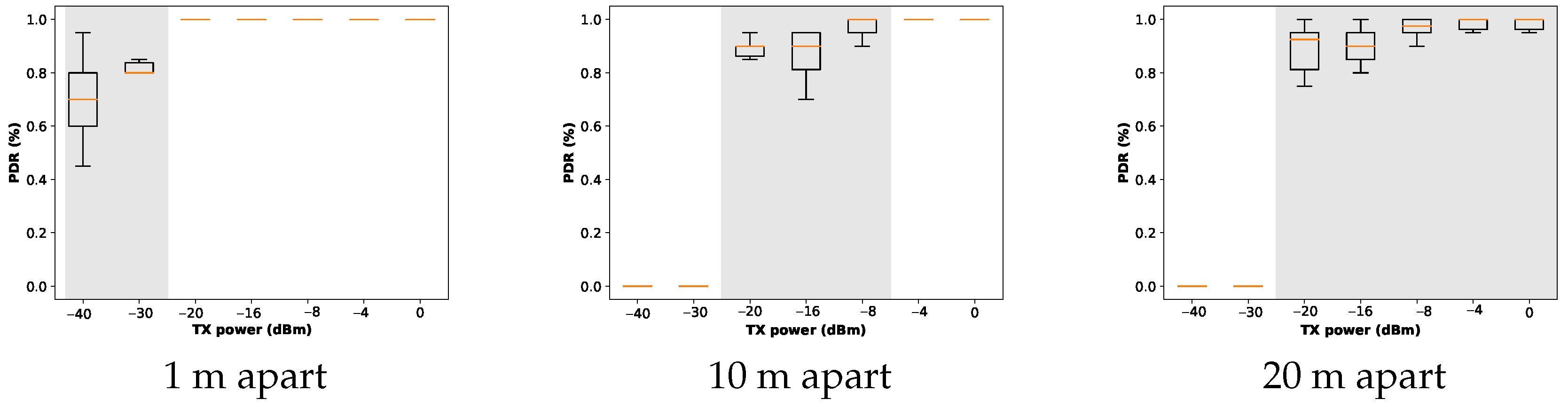
34], three classes of wireless links are identified, namely (i) connected, (ii) disconnected, and (iii) the links in the transitional region. The former two demonstrate a deterministic behavior; packets either go through or are dropped. However, for the transitional region, an element of randomness is involved.
Figure 3 illustrates the probability of delivering the packets being sent over a distance of 1, 10, and 20 m. The box plots show the spread and skewness of the measured data by showing their four quartiles. The transitional region is also determined using a shade of gray. It can be seen that the probabilities for delivery of packets associated with all transmission power settings fall with an increasing distance. For example, when the transmitter and the receiver are only one meter apart, the packets are very likely to be delivered even with the lowest power level, and higher transmission power settings almost surely guarantee the delivery of the packets. On the other hand, at a distance of 20 m, even the highest transmission power cannot guarantee 100% PDR.
Based on the above results, ACTOR blacklists the transmission power settings that lead to disconnected links. Blacklisting speeds up the process of finding the optimal transmission power during the initialization of the protocol, as described in
Section 5.2. These results also indicate that, even in simplistic scenarios where only two nodes are involved, a 100% delivery of packets cannot be assumed for higher transmission power settings. This assumption, as far as it is from reality, has been used in the related work to find the best transmission power. In the two-node scenario, this can be due to many reasons, ranging from the shadowing effect to external noise. In a mesh network, the complexity of estimating the link quality tends to increase. These results require us to come up with transmission power control solutions that consider lossy links and the dynamic nature of radio links.
5. ACTOR Design
This section describes the design of ACTOR, beginning with an introduction to the building blocks and the design, followed by reviewing each module in detail. Two versions of the algorithm are introduced. First, the basic ACTOR is designed for static environments. The second algorithm, ACTOR-D, differs from ACTOR by implementing the Discounted UCB algorithm while retaining all of the other core features.
5.1. The Building Blocks
ACTOR differentiates from the previous works [
10,
21,
24] as follows: Primarily, ACTOR aims to improve the throughput by mitigating the density of the networks and the hidden terminal problem. Consequently, the energy consumption is also reduced due to lower transmission power settings and fewer retransmissions of packets. Second, the selection of the transmission power settings is based on the UCB algorithm. Also, the non-stationary extension (discounted UCB) allows ACTOR to adapt to the dynamism in the links. ACTOR uses lightweight integer arithmetic to simplify the complexities of handling floating point operations. Third, ACTOR updates the ETX as a routing metric to avoid excessive parent changes while the algorithm figures out the best transmission power. Fourth, ACTOR integrates mechanisms to take care of parent–child links while adapting the transmission power so that parents do not neglect the link to children and selfishly reduce their transmission power.
When tuning transmission power based on the reception ratio of the packets, nodes encounter the exploration–exploitation trade-off. That is because, the more often a transmission power is used, the more confident one can get about the reliability of that specific transmission power. The drawback of this exploration is that trying sub-optimal transmission power settings only to evaluate them may cause some packets to be lost. However, a certain level of exploration is inevitable since the agent (node) learns about the environment based on the rewards (acknowledgments) that correspond to the actions (transmission power settings). The ultimate goal of the agent is to find the optimal action with the minimum exploration. Before sending actual packets, the reliability of the links can only be determined by measuring the signal strength and the noise ratio.
Despite a small memory footprint, RPL networks are expected to scale to thousands of nodes. Hence, the protocol limits the number of neighbors in its routing table. In non-storing mode, only the root node keeps track of the downward routes. Both the storing and non-storing modes of RPL favor collection-based traffic. We exploit these design choices in the transmission power control to limit the exploration to a reasonable level. This leads to faster exploration and reduces the size of the routing table, and fewer data packets are sacrificed to evaluate the transmission power settings.
Algorithm 1 summarizes the algorithm used by ACTOR to select the transmission power. Nodes initialize their neighbor table by setting their transmission power to the maximum and adding the neighbor to the table if required. After sending each packet, nodes update their action values. In this case, action values are the ratio of acknowledged packets for each transmission power and parent. Then, they select the action (transmission power and parent) that maximizes the UCB (as defined in
Section 5.3). This selection only considers the upward link, but each node must also meet the requirements of its children. In ACTOR, children declare their demands to their preferred parents using a bit in the data packet’s header. Each node uses a transmission power that (i) satisfies its children and (ii) satisfies the UCB requirements.
| Algorithm 1 ACTOR |
- 1:
Upon receiving a DIO, measure RSSI - 2:
Initialize the Action Values-Based Equation ( 5) - 3:
for each packet p sent through neighbor do - 4:
if not in the neighbor table AND Received ACK then - 5:
Add to neighbor table - 6:
set and to zero for all transmission power settings - 7:
end if - 8:
if Parent Switch happened then - 9:
Reset the learned Action Values - 10:
end if - 11:
Calculate UCB index and select transmission power based on based on Equation ( 8) - 12:
Select UCB index based on Equation ( 9) - 13:
Transmit packet with selected transmission power - 14:
Increment the counter for transmission power a: - 15:
Update from - 16:
if packet sent successfully then - 17:
the Action Values based on Equation ( 7) - 18:
end if - 19:
if packet sent failed then - 20:
the Action Values based on Equation ( 7) - 21:
end if - 22:
Set the transmission power to - 23:
if (if optimal transmission power changes) then - 24:
signals the demand () to the parent - 25:
end if - 26:
end for
|
We also help the UCB by filtering the transmission power settings that can be classified as insufficient. If a transmission power has been used at least three times and the action value is zero, we avoid using that action and lower power levels in the future.
It is also worth mentioning that, due to the lack of comprehensive support for floating point operation in the target IoT micro-controllers, we perform the mathematical operations in the integer domain.
5.2. Initialization of Action Values
RSSI is not always correlated with PDR due to variations in local link quality [
35] and, thus, is not the best candidate for the long-term selection of transmission power. To take external interference and link asymmetry into consideration, ACTOR uses the reception/loss of the packets as the reward. However, for the initialization of the action values, RSSI can be advantageous, as nodes can estimate their distance.
This mechanism requires the DIO packets to be sent with maximum transmission power (0 dBm) or a constant transmission power level noted as
. Upon receiving a DIO, nodes measure the loss in the signal strength,
, which is simply the difference between
and the received power, (
. If we assume the link is symmetric, and the transmission power is configured to
a, then the received power at the receiver would be
. Based on the empirical results from
Section 4, we estimate the
and
, which are the minimum and maximum RSSI measurements that put the link in the transitional region.
ACTOR initializes the Action Values in three classes, as in Equation (
5). Simply put,
is the estimated value of the PDR of the link if the transmission power is set to
a. If a certain transmission power puts the link in the transitional region, the PDR is set using a linear function of the power loss and the difference between
and
[
34]. This initialization is performed quickly, but it needs to be augmented later with the probing mechanism since it cannot capture noise or link asymmetry.
5.3. Upper Confidence Bound (ACTOR)
The optimal regret achieved through the UCB algorithm is the primary driving force of ACTOR. The UCB algorithm uses the upper bounds proposed in the previous section to handle the exploration–exploitation trade-off.
The UCB algorithm measures the confidence in the knowledge of the rewards of each arm in which the term arm corresponds to the transmission power settings. The agent keeps track of the number of times each node has been selected, based on which the UCB index is calculated. The UCB index expresses the estimated upper bound for the rewards that an arm can achieve. At each iteration, the agent chooses the action with the maximum UCB index calculated as in Equation (
7) [
36].
The first term,
, denotes the empirical mean of the rewards associated with action
a by time
t. Equation (
8) presents a recursive definition of the empirical mean of rewards. The reason we use a recursive method, rather than a simple
, is to reduce the memory footprint on the resource-constrained device.
r represents the most recent reward.
is the number of times action
a has been chosen until time
t. For the calculation of
, we use Lemma 1.
The second term is known as the exploration bonus or confidence width, and it denotes the degree of confidence in the expected reward, and it decreases with the number of times that arm is pulled. UCB shows more of a tendency to explore arms if they are either (a) promising, because is large, or (b) not well explored due to a large confidence width.
Blacklisting of the futile transmission power settings (based on RSSI) is performed during the initialization. In the example illustrated in
Figure 1b, for the lowest three transmission power settings, the link is put in a disconnected region. Hence, ACTOR sets the PDR to 0 and virtually increases
. This will reduce the tendency of the exploration strategy to select those power levels.
5.4. UCB for Non-Stationary Bandits (ACTOR-D)
The basic version of UCB assumes that the distribution of rewards for each arm (transmission power) is stationary in time. However, that is rarely the case, and these distributions are subject to severe change due to evolving environments and mobility [
37]. To handle non-stationary rewards, Garivier [
18] proposes a variant of UCB called the Discounted UCB.
The Discounted UCB alters the calculation of the first term in the UCB index by applying an adjustable discount factor (
) to the older observations, giving more importance to the new ones. Equation (
9) determines how the discounted UCB calculates rewards.
is the maximum possible value for the rewards (100). For tuning
, a simple choice is to resemble the weight that Contiki-NG RPL assigns to the new packet’s ETX in the routing [
38]. Since there is no need to keep track of previous rewards, the Discounted UCB occupies a smaller space in the memory. Given the memory limitations, we chose the Discounted UCB algorithm to be integrated with ACTOR.
The use of bandit models in embedded systems has been minimal due to practical limitations such as missing floating point operations and a small memory capacity. To tackle this challenge, fixed-point arithmetic has been proposed in the literature. Krentz et al. [
36] propose methods to efficiently calculate two variants of the UCB algorithm (namely the Discounted UCB and the Sliding Window UCB) for the channel selection problem in IEEE 802.15.4. Through Monte Carlo simulations, they also showed that the accuracy loss in their method is negligible.
ACTOR requires efficient algorithms to determine the natural logarithm and square root. The natural logarithm is easily convertible to base-2 since
. Then, the binary logarithms can be calculated via repeated squaring and dividing [
39].
For the implementation of the square root, efficient algorithms exist. The simplest algorithm consists of a linear search that starts checking all the second power of all integers starting from 2 and returns the maximum integer that has a square that is smaller than the input. A more efficient solution improves this search to be binary. All of these methods work fine to determine the UCB.
5.5. Topology Control
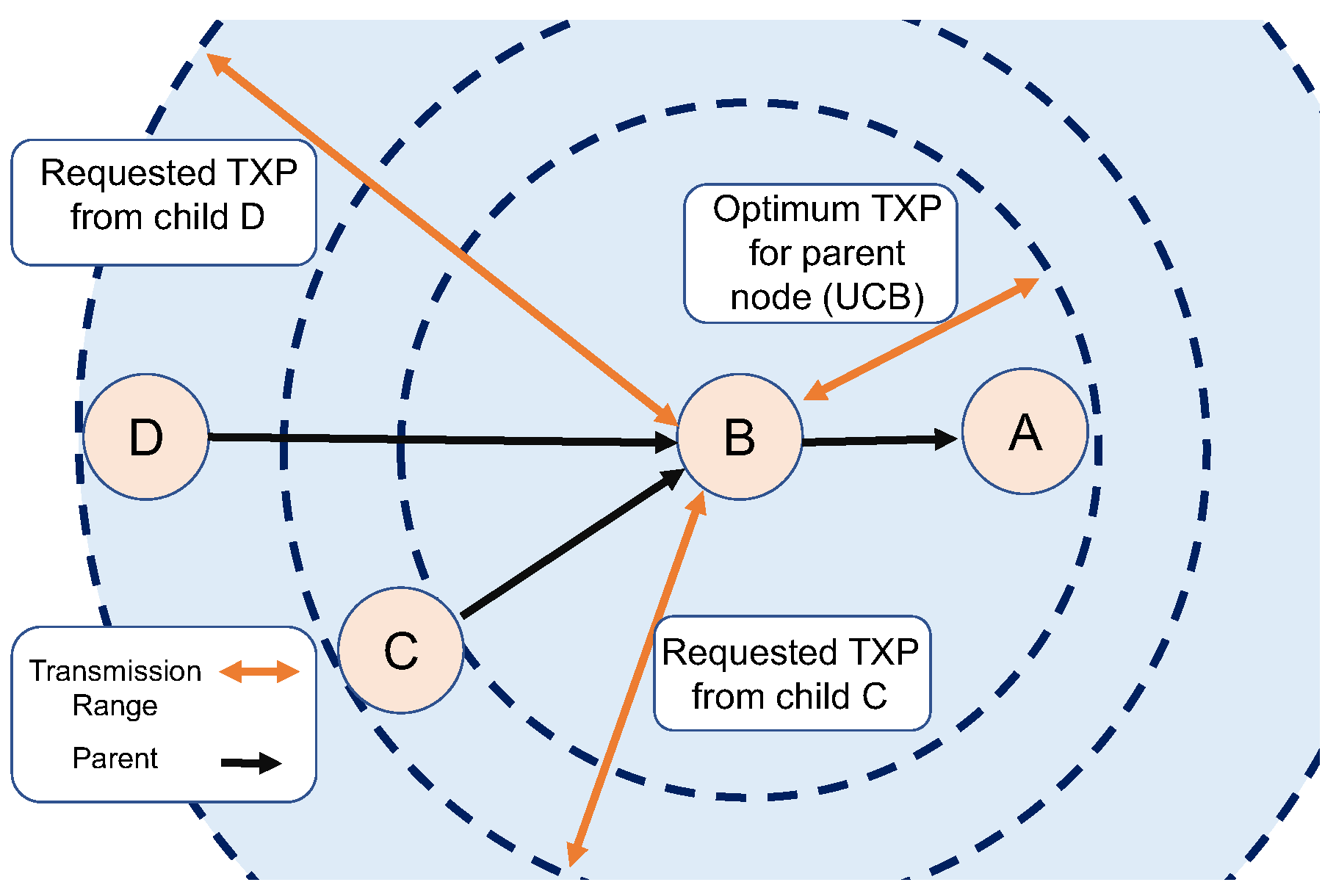
Providing connectivity for the farther nodes is not a concern when selecting the transmission power in a single-hop setting, but ACTOR is designed for multi-hop networks. A selfish parent could reduce the transmission power and increase its own battery life, leaving its children to find other parents. Another potential problem is that the abrupt changes in the topology may trigger global/local repair mechanisms that incur an overhead of the control packets when the nodes are changing their transmission power.
ACTOR’s topology control mechanism tries to avert excessive changes in the RPL’s DODAG. When children acquire a level of certainty in their desired transmission power, they demand the parent keep their transmission power at least as high. In other words, nodes send a packet to their parent asking for a minimum transmission power. As illustrated in
Figure 4, the parent node can choose a low transmission power for its own data packets, but it commits to higher levels to support its children. Topology control not only avoids the RPL’s repair mechanism but also keeps the children connected.
5.6. Routing Metric
ETX is the most commonly used routing metric for RPL. We updated ETX to account for the transmission power control mechanism. Calculating ETX in the open implementation of Contiki consists of applying an
Exponentially Weighted Moving Average (EWMA) to the ETX, as in Equation (
10). The factor
determines the weight based on which new observations are preferred to the old ones.
ACTOR’s calculation of ETX must consider that the transmission power is changing. For example, if a node temporarily tries to evaluate a link with a low transmission power, the ETX associated with this transmission power should not be advertised to the farther nodes. Hence, for each neighbor, ACTOR maintains a table (rather than a single value) for the ETX associated with each transmission power, according to Equation (
11).
When the trickle algorithm triggers the transmission of a DIO, the ETX value that is advertised is associated with the transmission power that maximizes the ETX index at that point in time.
6. Evaluation
In this section, we evaluate the performance of ACTOR and ACTOR-D, and we compare them with standard RPL (with the maximum transmission power) and our two selected benchmarks, TPP and XRPL. The evaluations are based on both simulations and a physical testbed that consists of NRF5340 boards. Due to compatibility issues with the hardware platform in our testbed (NRF5340), XRPL was evaluated only in the simulations. We first took a look at the setup for the simulations and the physical testbed and then analyzed the results obtained using each of them.
We used a single-channel CSMA for the communication between nodes to show that the proposed method succeeds in reducing channel contention. RPL’s objective function is set to
Minimum Rank with Hysteresis Objective Function (MRHOF) with ETX as the routing metric. We repeated the experiments during working hours and after working hours to confirm the results, with each run lasting 10 min (both in experiments and the simulation), which gave the protocol enough time to converge and be fairly compared. To support reproducible results and measurable confidence, we benefited from a recent framework called TriScale [
40]. At least five independent runs are required to estimate the mean of a measured metric with a probability of 95 percent. We show the 95% confidence interval (a minimum and a maximum of five runs) in the results using error bars.
6.1. Simulation Setup
The simulations were conducted using the built-in simulator of Contiki, Cooja, which comes with plenty of options to model the radio models, including the
Unit Disk Graph Model (UDGM) and the
Logistic Loss Model (LLM). The UDGM model plots two disks around each node, representing the connectivity range and the interference area. LLM provides a more realistic model, as it uses the logistic function to calculate the reception probability of packets based on RSSI. The simulated boards are Sky Motes with TI’s MSP430 F1611 controller with 10 kB of RAM and 48 kB of flash. They are equipped with a cc2420 radio that supports eight different settings for transmission power. This choice of sky motes was made to demonstrate the possibility of running the algorithm on legacy COTS since, in the experiments, we used a rather modern board. The current consumption associated with all the transmission power settings for sky motes is detailed in
Table 1. For the NRF motes that are used in the experiments, the possible transmission powers are shown in
Table 2.
We considered 7 different scenarios, as detailed in
Table 3. The parameters in these scenarios were chosen deliberately to exemplify challenging conditions for routing and transmission power control.
Scenario A represents a small-scale network with nodes positioned at distances where there is no benefit in reducing the transmission power. This scenario portrays a sparse deployment that is challenging for ACTOR. In such a deployment, ACTOR is expected to converge on high transmission power settings, and trying lower transmission power will only waste resources.
In scenario B, the parameters were chosen to exhibit density. Forty nodes were positioned randomly in a square. If the RPL nodes transmitted at their maximum power (0 dBm) with a 50 m range, then most of the nodes would have a high number of neighbors (at least 20).
Scenario C (illustrated in
Figure 5) resembles a multi-cluster topology, and it is based on the multi-instance feature of RPL. If the nodes in a cluster manage their transmission power properly, the clusters will not interfere with each other. The hop distance of the nodes is less than in the previous scenario. With fewer children, parent nodes have more freedom to tune their transmission power.
In scenario D, a high load of traffic is applied to a medium-dense network.
Scenario E presents the same 5 × 5 grid with a lower link quality, and it uses the more realistic LLM link model.
Scenario F includes a 5 × 5 grid and one mobile node. The mobility pattern is simple, and it can be dealt with using only the transmission power control. This topology is illustrated in
Figure 5.
Scenario G tests the scalability of the system in a topology with 100 randomly placed nodes.
6.2. Experimental Setup
Conventional simulators and their radio models fail to accurately model physical characteristics such as the capture effect or the distribution of the noise since they are too simplistic and usually overlook some details. For radios with narrow band modulation, it is not only the receiver threshold and non-ideal antennas that cause the transitional region. Multi-path fading plays a major role [
34] in the connectivity of these radios, and transmission power control is a decisive parameter in managing the shadowing effect. Most simulators for low-power radios fall short of modeling the shadowing effect by considering a log-normal shadowing model. Real-world experiments are undeniably more accurate in this matter.
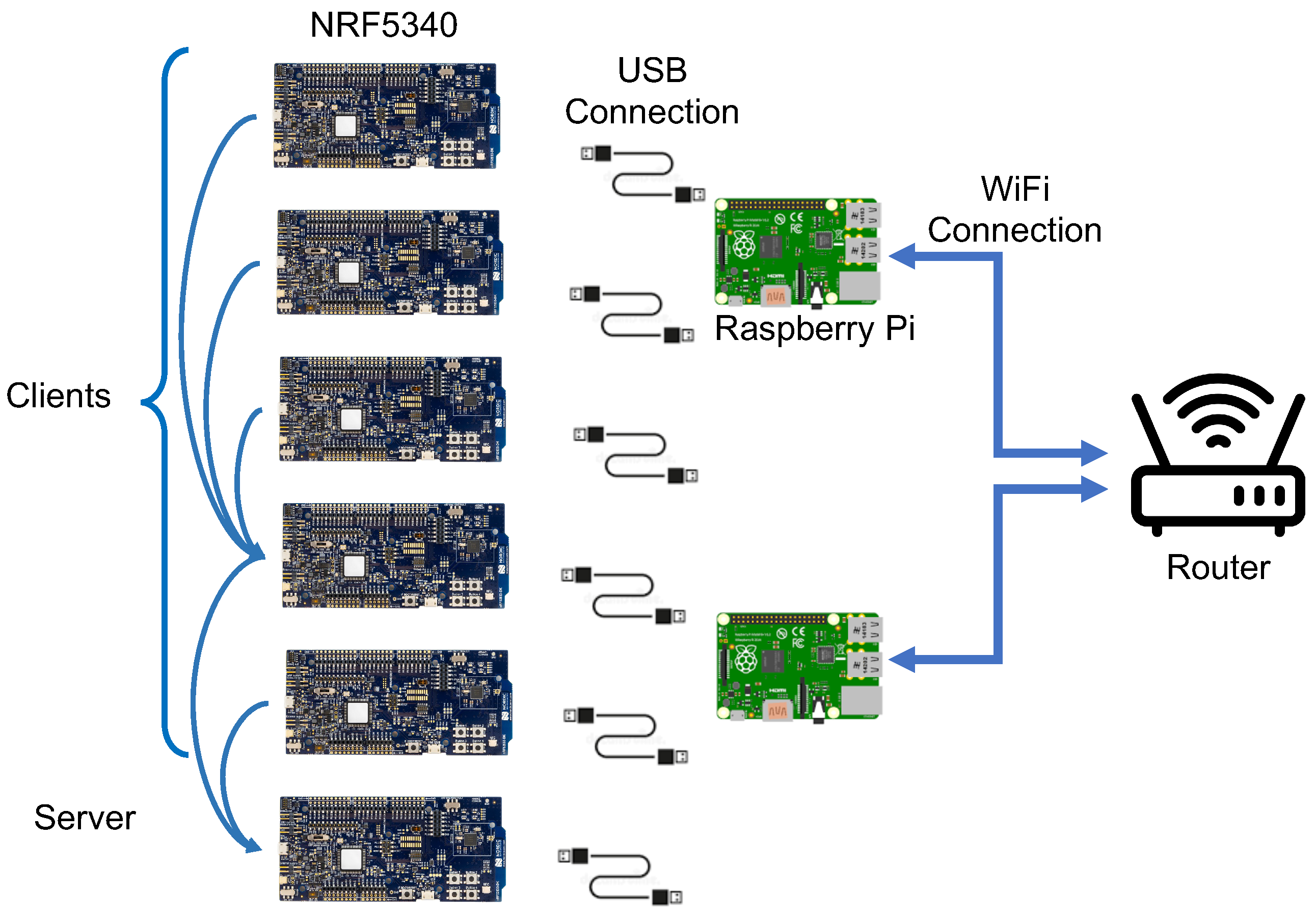
In order to obtain more accurate evaluations, we assembled a physical testbed containing 40 NRF5340 boards. The experiments were conducted using the modern NRF5340 development boards introduced by Nordic Semiconductor [
33] featuring two Arm Cortex-M33 processors. The first processor, referred to as the network core, comes with 256 kB of flash and 64 kB of RAM, and it runs at a low power mode, while the application core provides a considerably higher computation capacity. To optimize the power consumption, this application core gives up control to the network core upon initialization and remains inactive thereafter.
According to the datasheets, the NRF5340 affords the flexibility to configure 24 distinct settings for transmission power, offering a finer granularity of control over the transmission power in comparison to the eight levels available in sky motes [
41]. In an effort to maintain a fair utilization of system memory, we opted to restrict the NRF5340 to employ eight transmission power settings. As shown in
Table 2, NRF5340 consumes less energy compared to sky motes, owing to its more recent radio.
Part of the experimental setup is illustrated in
Figure 6. Ten Raspberry Pis (only two are shown) are powering up and controlling the NRF5340 boards. The Raspberry Pis are then managed through a
Secure Shell (SSH) protocol over a Wi-Fi access point configured to operate on a specific channel so that it does not interfere with the operation of NRF boards.
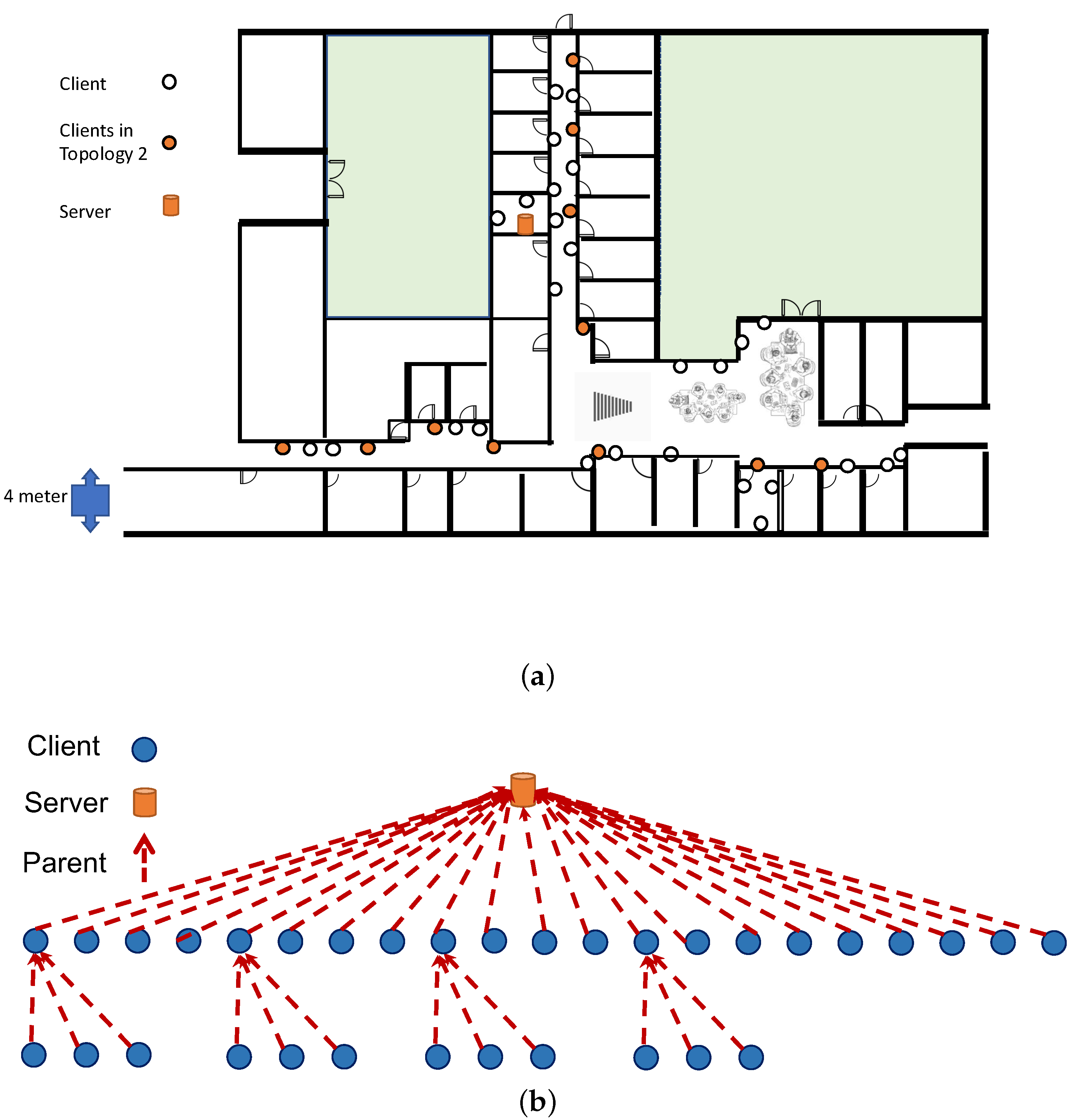
The testbed was located in the corridors and rooms of the IDT school of the Mälardalen University, as illustrated in
Figure 7a. The experiments were performed using two settings with (i) orange nodes establishing a sparse topology for a 12-node scenario and (ii) utilizing all 40 nodes for a dense deployment. The running topology (for both ACTOR and default RPL) is dynamic, and it depends on time and the randomness caused due to the trickle algorithm that triggers the dissemination of DIO packets. The most recurring topology consists of almost half of the nodes being connected in a single hop, while the rest are being connected with two hop links (as demonstrated in
Figure 7b. ACTOR-D and standard RPL ended up having very a similar topology but with a much lower rate of parent switching. Analyzing the normal Wi-Fi traffic in the office environment showed that channel 24 in IEEE 802.15.4 was the least disrupted. We fixed the communication of our testbed on this channel to minimize Wi-Fi interference.
6.3. Simulation Results
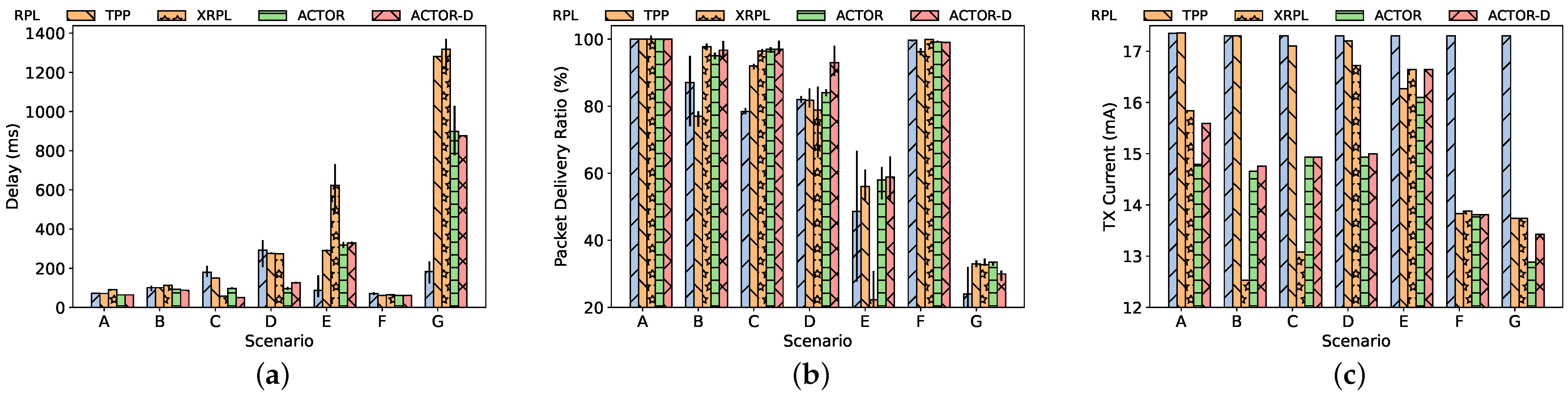
Figure 8 summarizes the results of the conducted simulations in terms of PDR, the end-to-end delay, and the current used for transmission.
Figure 8b plots the average PDR and shows that ACTOR and ACTOR-D achieve a lower packet loss compared to RPL and the benchmarks in dense (B), multi-cluster (C), high-rate (D), lossy (E), mobile (F), and 100-node (G) scenarios. This is mainly due to spatial reuse in ACTOR that overcomes the congestion in the wireless medium. In a dense network, ACTOR exhibits better resilience against heavy traffic loads compared to TPP and XRPL. In scenario A, ACTOR leads to negligible loss (attributable to exploration), indicating that reducing the transmission power in a sparse network is not as beneficial as in a dense network. Under ACTOR, CSMA nodes happen to have fewer backoffs and failed CCAs. This leads to a significant improvement in the delay for ACTOR in scenarios C, D, E, and G which is demonstrated in
Figure 8a. Like PDR, ACTOR outperforms RPL, TPP, and XRPL in terms of end-to-end delay in the dense scenarios, confirming that ACTOR reduces channel contention. In order to test the scalability of the system, we included a scenario with 100 randomly positioned nodes. As you can see, in scenario G, ACTOR improves the delay and current consumption (
Figure 8c) while providing the same level of PDR. Please note that, in scenarios E and G, RPL provides a very small delay, which is irrelevant since most of the packets are dropped by RPL. In ACTOR, all the nodes send a packet to their parents to indicate the minimum required transmission power to agree on a transmission power that does not jeopardize the routing protocol. When normal data transmission is challenged due to intensive collisions, the overhead caused by the negotiation can be excessive. Specifically, in scenario G, ACTOR nodes transmitted 12 thousand extra packets for transmission power negotiations with all 100 of the nodes during the 10 min, while the transmitted data packets summed up to almost 30 thousands. Despite this overhead, the optimal selection of transmission power of ACTOR led to good results in such large scale.
We also measured the current consumption using Energest (
https://docs.contiki-ng.org/en/develop/doc/programming/Energest.html accessed on 3 January 2024), which is a software-based energy estimation module.
Figure 8c depicts the average current consumption for all of the nodes. ACTOR consistently (even in a sparse scenario) achieves lower energy consumption due to its regret-optimal transmission power selection. Reducing the transmission power not only reduces the per-transmission energy but also leads to fewer retransmission of packets, further improving the energy consumption. ACTOR nodes report (i) less time spent with their radio in transmission mode and (ii) a lower transmission power. In the dense and multi-cluster topology, the benefits of employing ACTOR are even more palpable.
In the sparse topology (A), the nodes cannot meaningfully reduce their transmission power. Hence, ACTOR cannot demonstrate its advantages in PDR, and there is only a small gain in terms of energy consumption. Nevertheless, ACTOR may sacrifice a few data packets to explore lower transmission power settings that are not helpful in a sparse setting, and this leads to lower PDR. ACTOR tries to minimize this so-called exploration loss to a negligible level via its blacklisting mechanism and the UCB exploration strategy. As we can see in the transition from scenarios A to G as the topology becomes dense, the exploration loss becomes more important. In most of the scenarios, ACTOR outperforms XRPL. The advantages of optimal exploration (UCB) are more evident in the scenario with unreliable links (E), as XRPL shows a lower PDR and higher delay without being able to reduce its transmission power. In the scenario with mobility (F), we see that ACTOR manages to keep the connectivity better than TPP and almost at the same level as RPL (which performs well due to its high transmission power). However, it is worth noting that sustaining connectivity for mobile nodes is even challenging for ACTOR, as the previously established rewards have become irrelevant.
6.4. Experimental Results
Using the testbed that we described previously, we compared the performance of two versions of ACTOR with the baseline, RPL, and the benchmark, TPP.
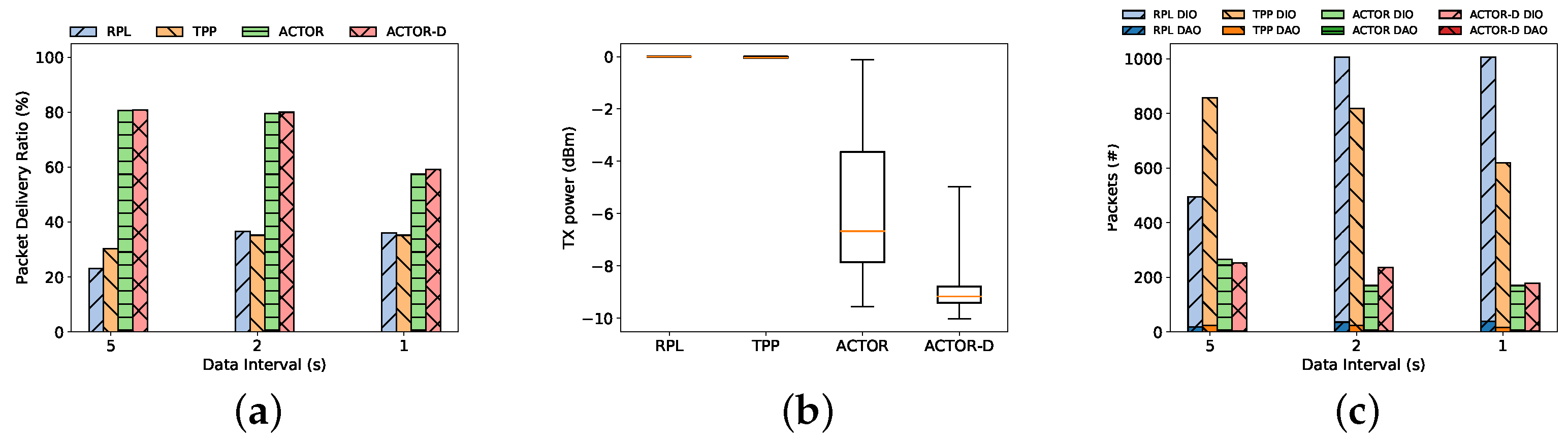
Figure 9 shows the advantage of using ACTOR in terms of PDR, transmission power, and routing overhead as the traffic increases.
Figure 9a plots the aggregate packet delivery ratio of ACTOR, ACTOR-D, TPP, and standard RPL with different data intervals. The results suggest that the two versions of ACTOR provide better throughput (PDR) than TPP and RPL. When a smaller volume of traffic is applied to the network (5-s interval), ACTOR beats both RPL and TPP by almost 40 percent. In other words, ACTOR reduces the packet loss rate by four times compared to the standard.
The advantages of using ACTOR in this scenario are better shown in the experiments than in the simulations. This stems from the fact that, in a realistic environment, none of the links are ideal. As we saw in
Section 4, links behave randomly in the transitional region. In this situation, benchmarks cannot find a transmission power that transmits a number of consecutive packets successfully and select the maximum transmission power. UCB is able to find the best transmission power in those cases, but the benchmarks fails to adapt their simplistic transmission power control. The other reason is the local repair mechanism in the RPL protocol. Once nodes detect an abrupt change in the measured routing metric (ETX), they initiate the local repair mechanism of RPL, which consists of disconnecting from the parent and sending a DODAG Informational Solicitation (DIS) asking for a new parent. This can be seen in
Figure 9c, which shows that the local repair mechanism causes more control packets (both DIO and DAO) for RPL and TPP compared to ACTOR.
ACTOR-D slightly outperforms ACTOR in the 40-node experiment, thanks to the discounting mechanism. Nodes that keep changing their transmission power impair the wireless links belonging to other nodes. Hence, when nodes are not moving or when there is a dynamic source of interference, this may be the source of dynamism in the quality of the links, and ACTOR-D is tailored to handle this.
Figure 9b that ACTOR and ACTOR-D successfully reduce the transmission power while providing better connectivity. For RPL, the transmission power is always at 0 dBm. The quartile chart shows that TPP nodes barely try lowering their transmission power and converge on the maximum. In addition, ACTOR improves the average number of retransmissions for all of the nodes in the network. This metric depends on (i) the number of hops and (ii) single-hop contention. Since the number of hops has not changed, a higher number of retransmissions indicates more hidden terminals for the medium in the MAC layer. We can see that ACTOR succeeds in reducing the hidden terminals.
In addition to the transmission power, another popular best practice to reduce energy consumption is to reduce idle listening by allowing the node to put the radio in sleep mode [
42]. Although the results presented here considered CSMA, ACTOR is expected to be beneficial for other MAC protocols as well. For example, TSCH networks take advantage of diversity in both the frequency and time domains. TSCH nodes agree on a schedule to use channels in time (time is divided into timeslots). These schedules contain shared timeslots for broadcasts, reserved timeslots for unicast communications between pairs, and also idle timeslots for the radio to sleep. The scheduler needs to take the interfering nodes into account when assigning reserved slots. Optimizing the transmission power leads to fewer interfering nodes and fewer constraints for the scheduler. However, transmission power control in a duty cycling network is considered out of the scope of this work.
We also performed the experiments in a scenario that consists of 11 clients and 1 server providing a sparse topology, as illustrated using orange circles in
Figure 7a. The measurements are presented in
Table 4. Another significant aspect is keeping the convergence time of the routing protocol short. The number of parent switches can be an indication of the convergence time of the routing protocol. The results also showed that ACTOR did not increase the hops distance of the nodes, reduced the transmission power, and significantly reduced the number of parent switches. Overall, the experimental results are in line with the simulations, as they both show the advantages of tuning the transmission power when wireless links are unreliable and network is dense.
7. Conclusions
This paper has proposed ACTOR, an extension to RPL that adapts the transmission power using reinforcement learning. The routing and transmission power control mutually improve each other. The information derived using the routing protocol reduces the number of transmission power settings that must be evaluated. Transmission power control also helps RPL keep the topology stable by mitigating the interference among the nodes. We have provided compelling evidence, including simulation and experimental results indicating that the proposed method improves the performance of multi-hop networks in different scenarios, such as dense networks and a high traffic load.
The results are indicative of a positive correlation between the success of the exploration strategy to optimize the transmission power and networking performance. The results vary, depending on the scenarios, but generally for dense networks, the experiments showed a 20–40% increase compared to the benchmark in PDR, as well as the achievement of up to 10 dBm lower transmission power. This enhancement is accompanied by a more stable topology and lower routing overhead, which are attributable to the better management of channel contention. The main catalyst behind the results is the intelligent UCB and discounted UCB algorithm, which explores the transmission power settings with an intelligent mechanism.
As future work, we plan to integrate ACTOR with solutions for the mobility of the nodes under which RPL exhibits poor performance. The support for a dynamic environment can be extended to mobility, but it requires the tailoring of the exploration strategy and integration with the existing mobility management solutions.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}