
On Difference Pattern Synthesis for Spherical Sensor Arrays †



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Background
3. Proposed Difference Pattern Synthesis Method
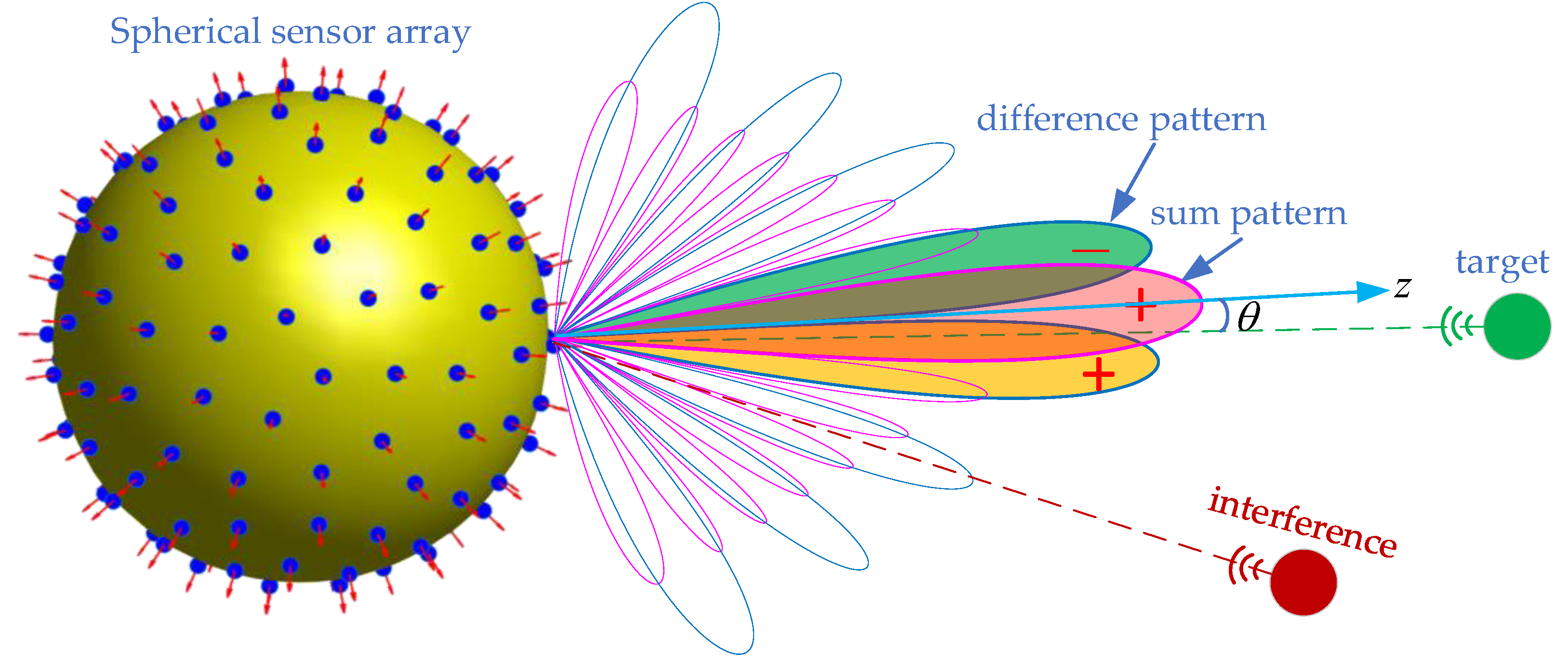
3.1. Spherical Sensor Array Difference Pattern
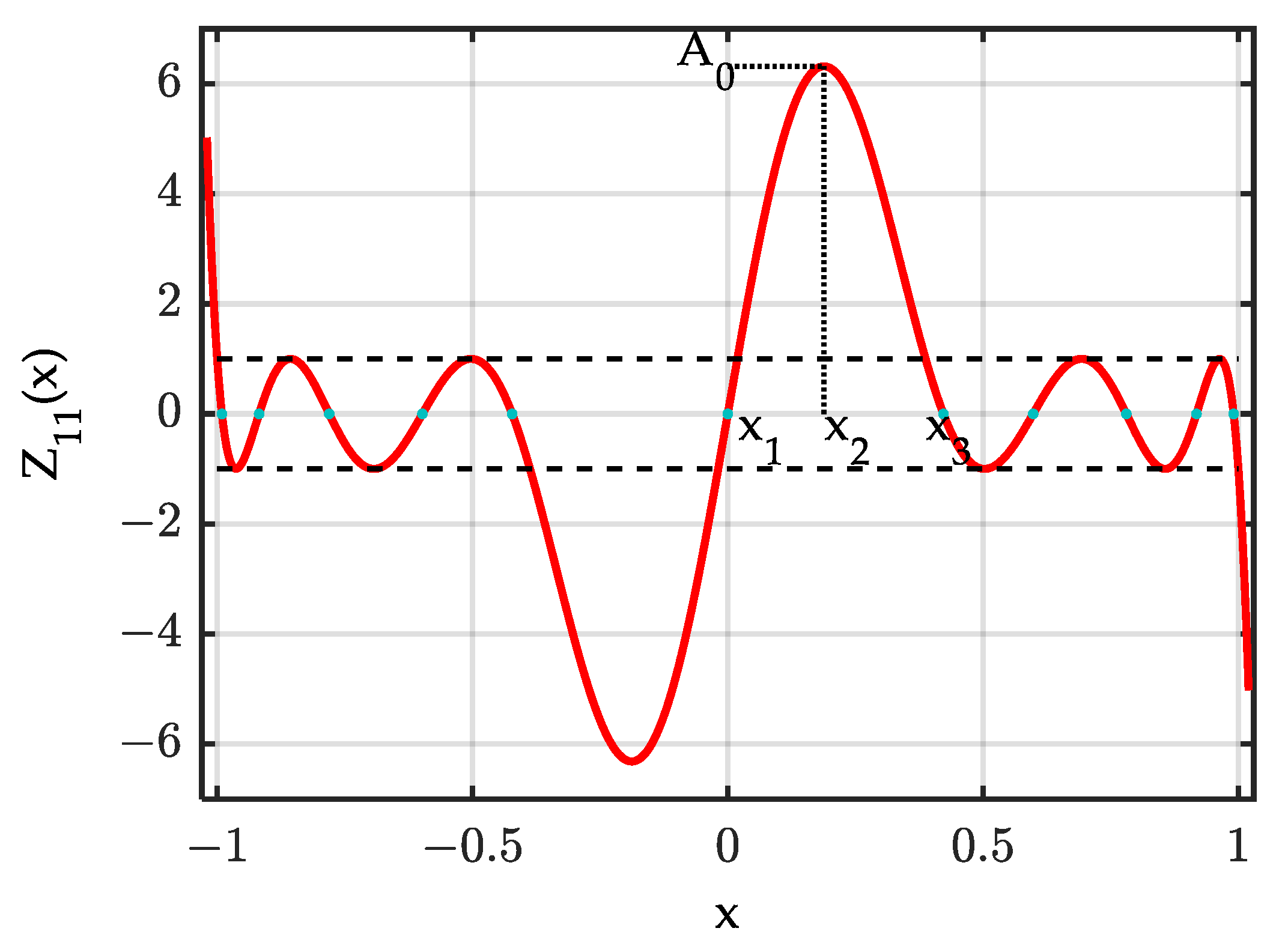
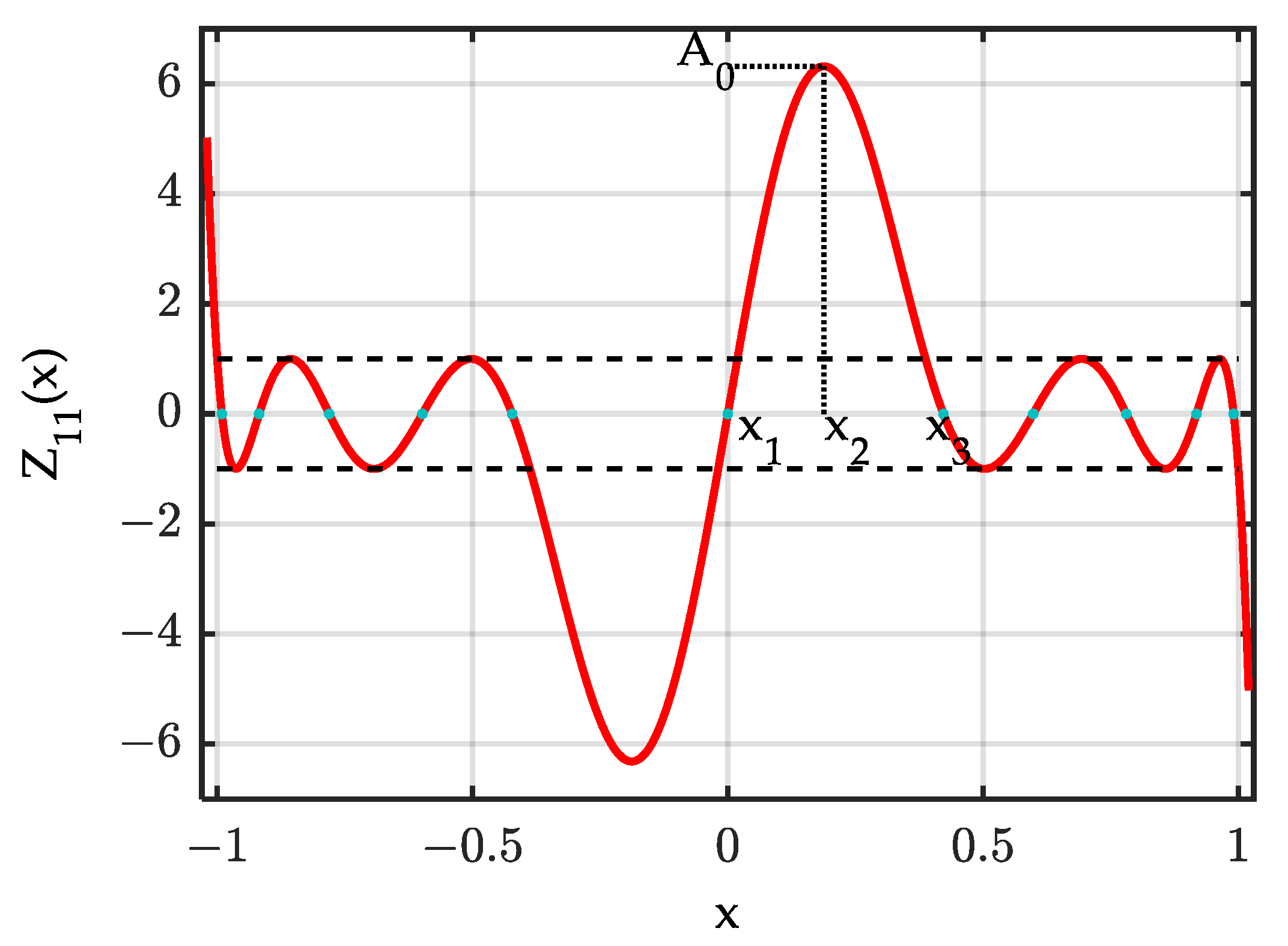
3.2. Zolotarev Difference Pattern of Elements
- (1)
- For a specified sidelobe ratio (SLR) or the main-lobe width, the Jacobi modulus parameter , which is related to the specified SLR or main-lobe width, is calculated. Subsequently, the Zolotarev polynomial is evaluated using the numerical method, and its expansion in the standard polynomial form is obtained:
- (2)
- Let , and substitute it into the above polynomial, let , then the desired Zolotarev difference pattern can be expressed:
- (3)
- Equate in Equation (12) (b) to and determine the coefficient , then, the element excitation can be calculated from .
3.3. The Generalized Bayliss Difference Pattern of Elements
4. Simulations
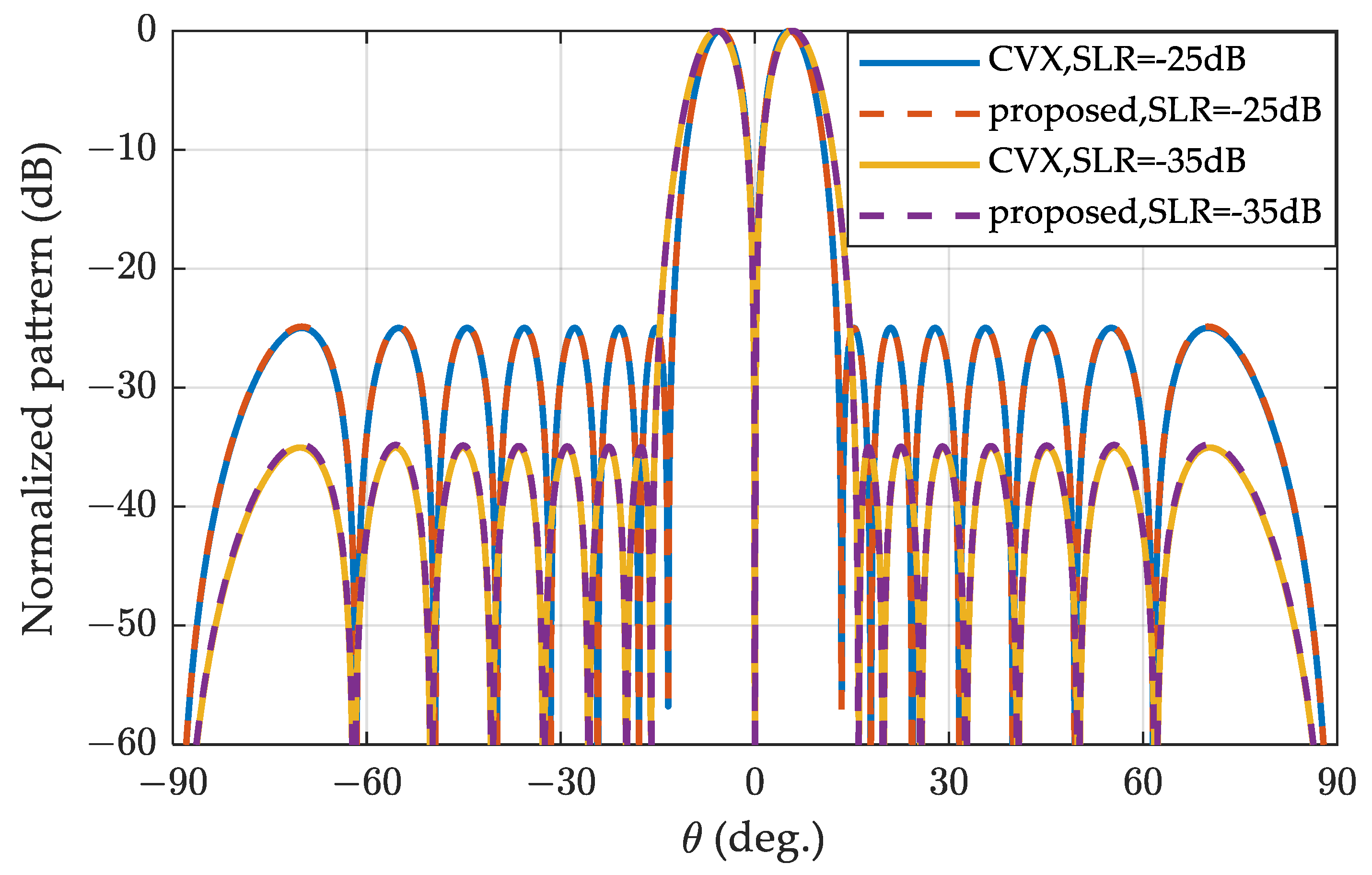
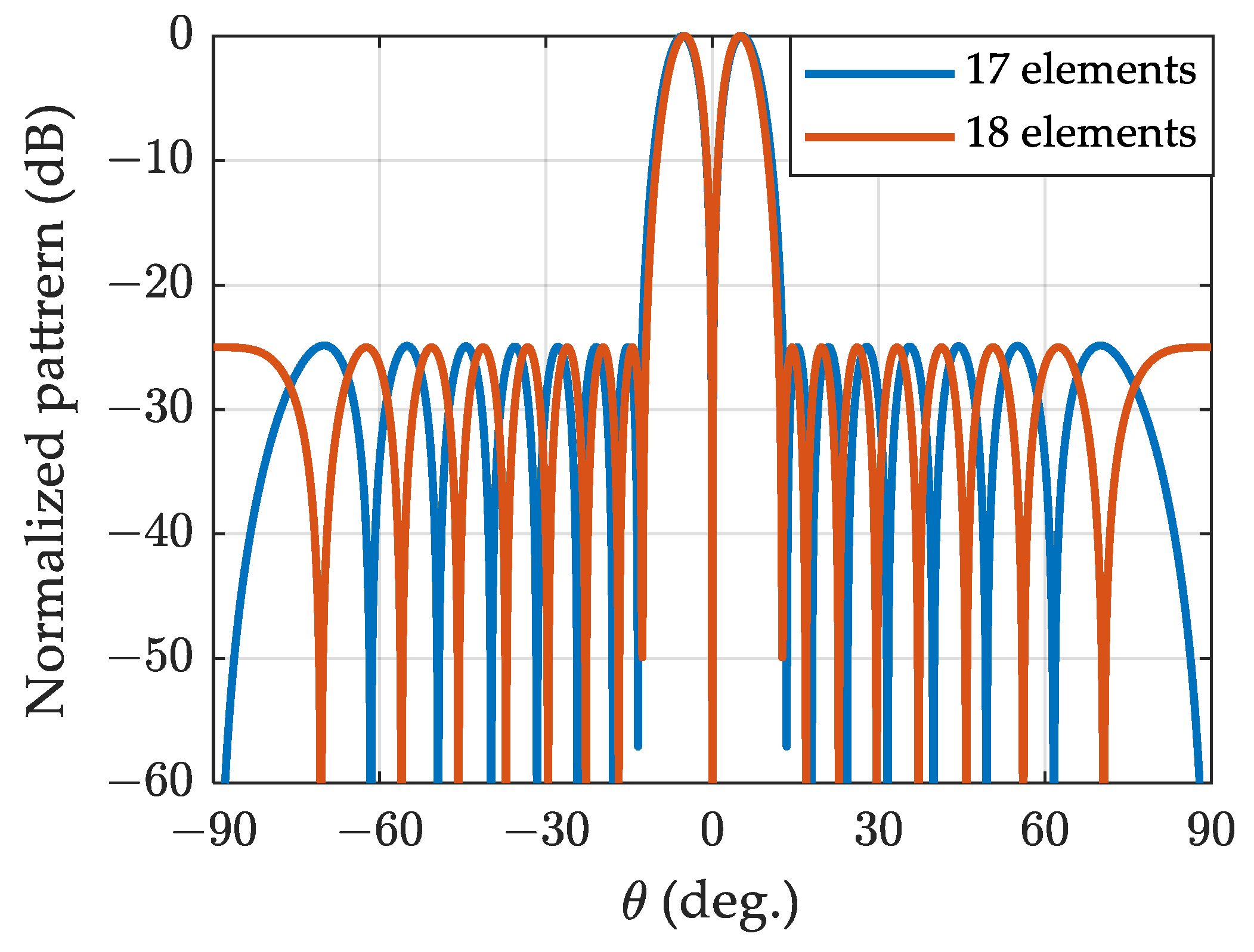
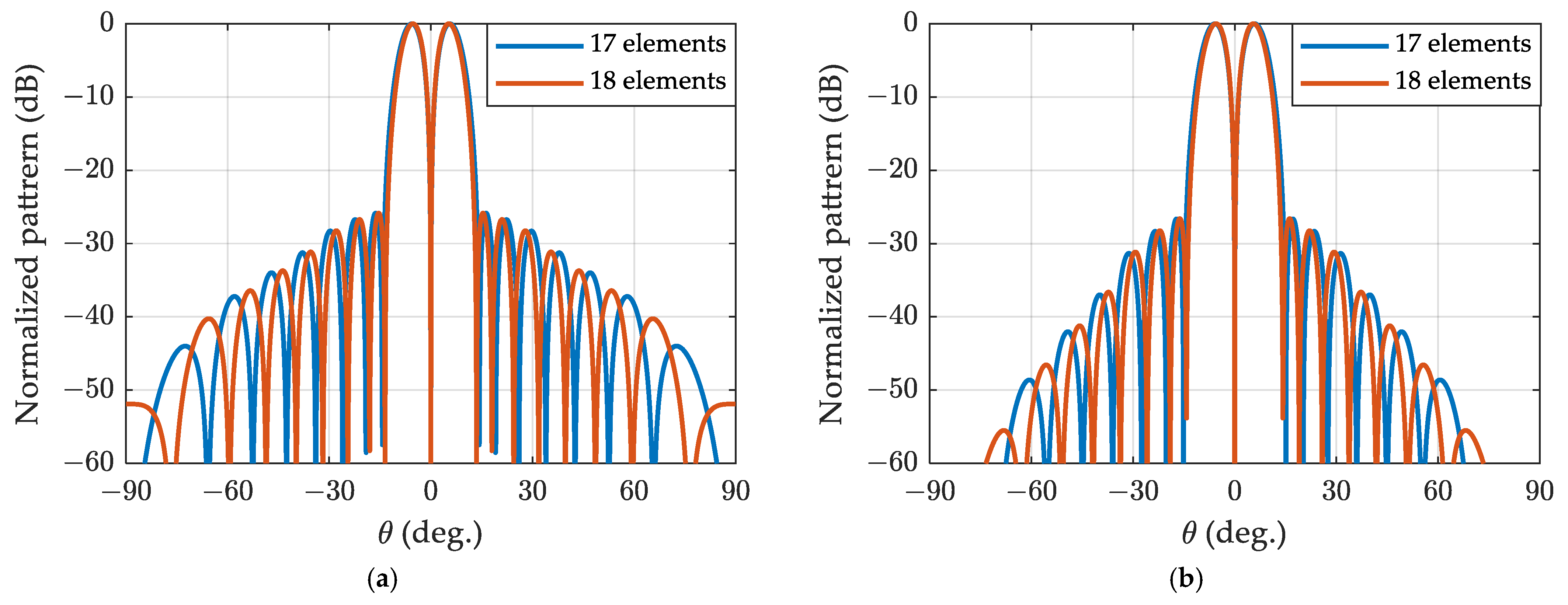
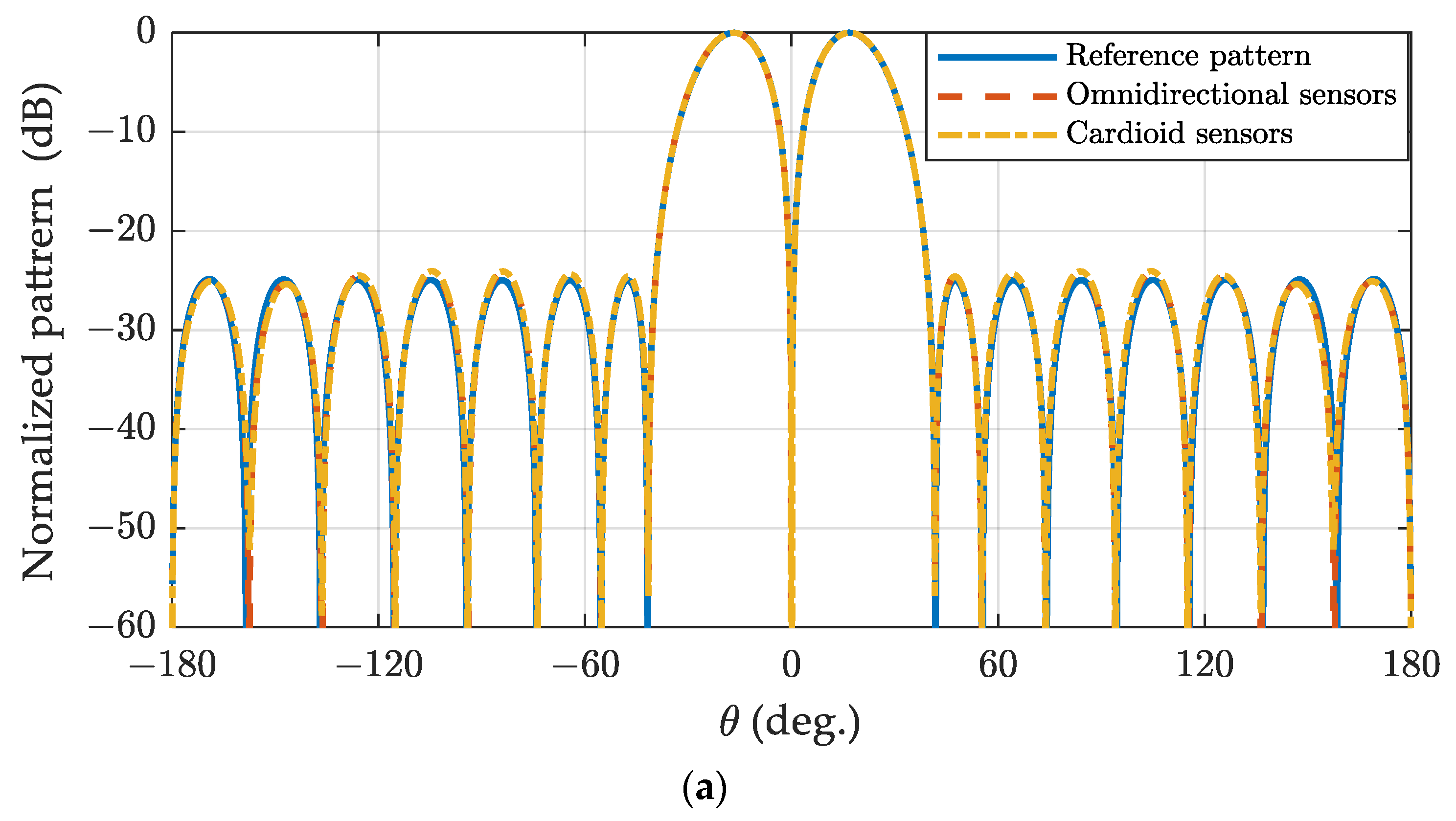
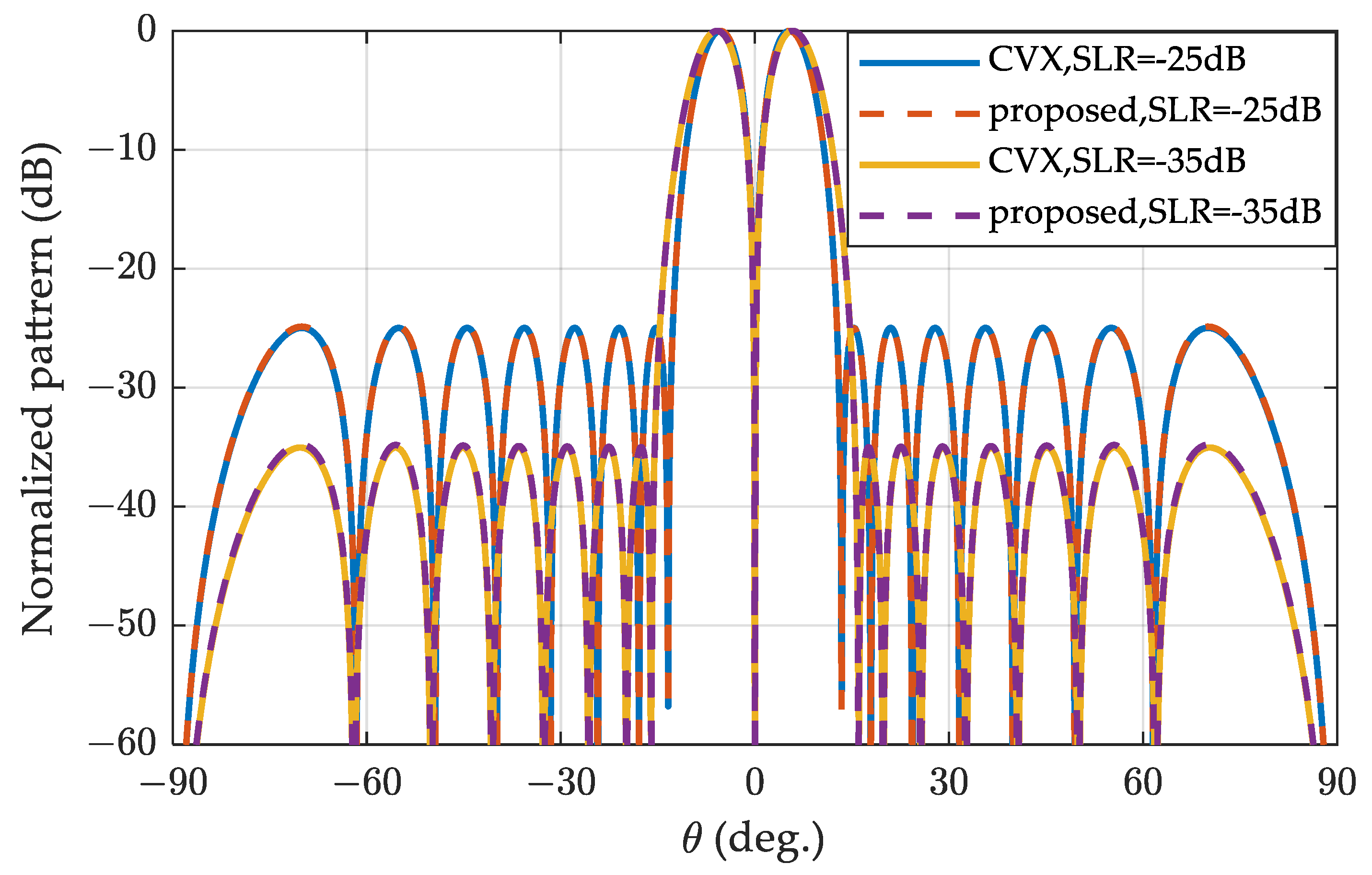
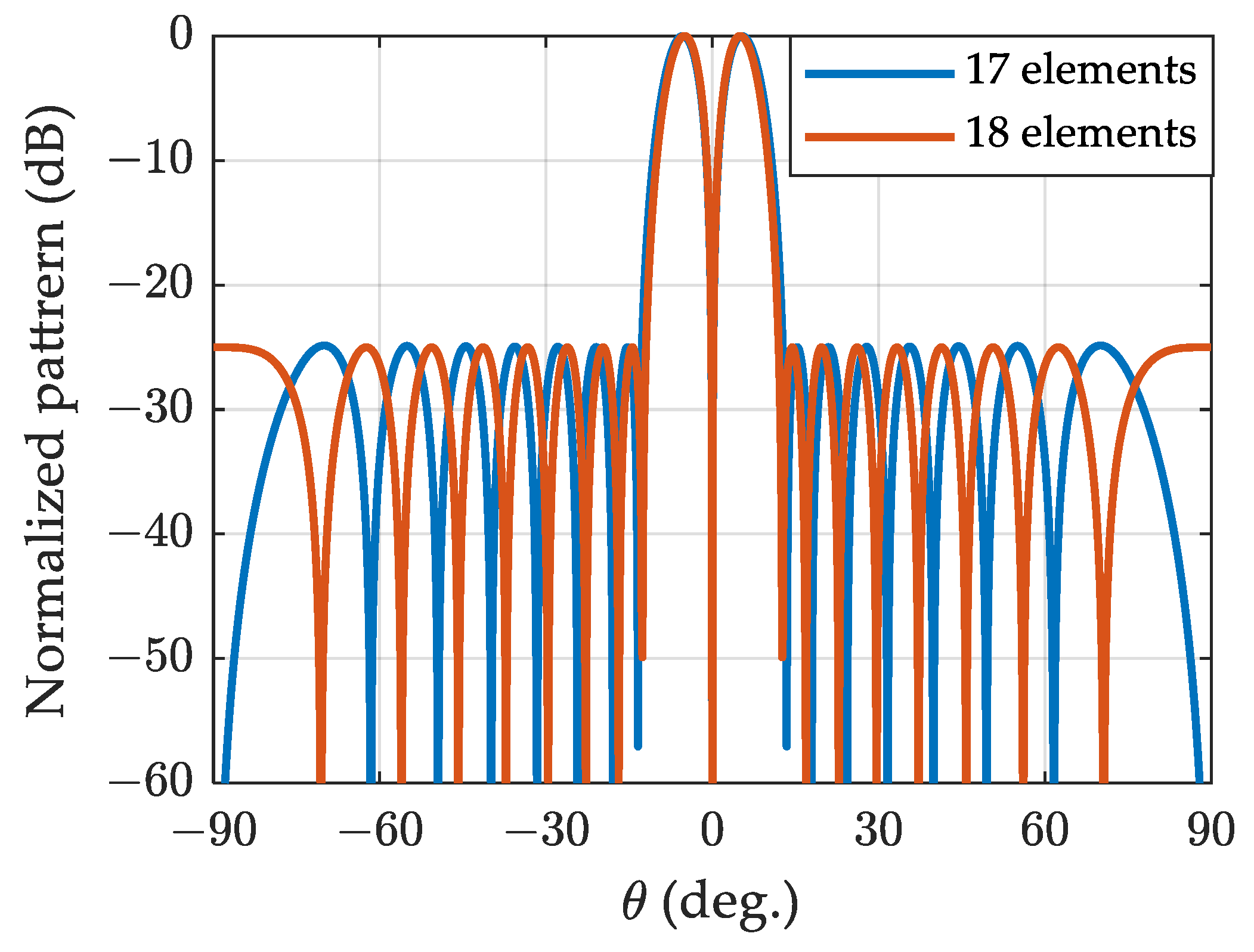
4.1. The Difference Pattern of the ULA
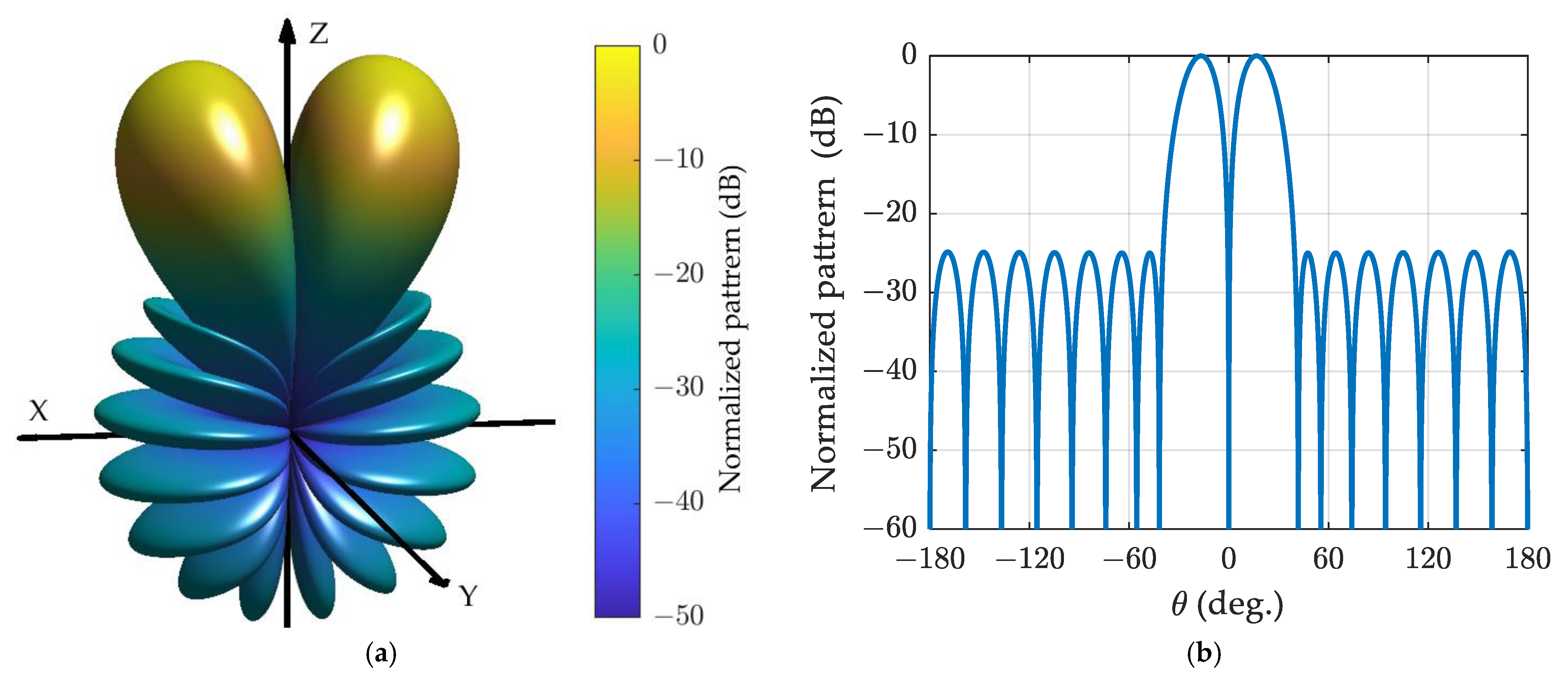
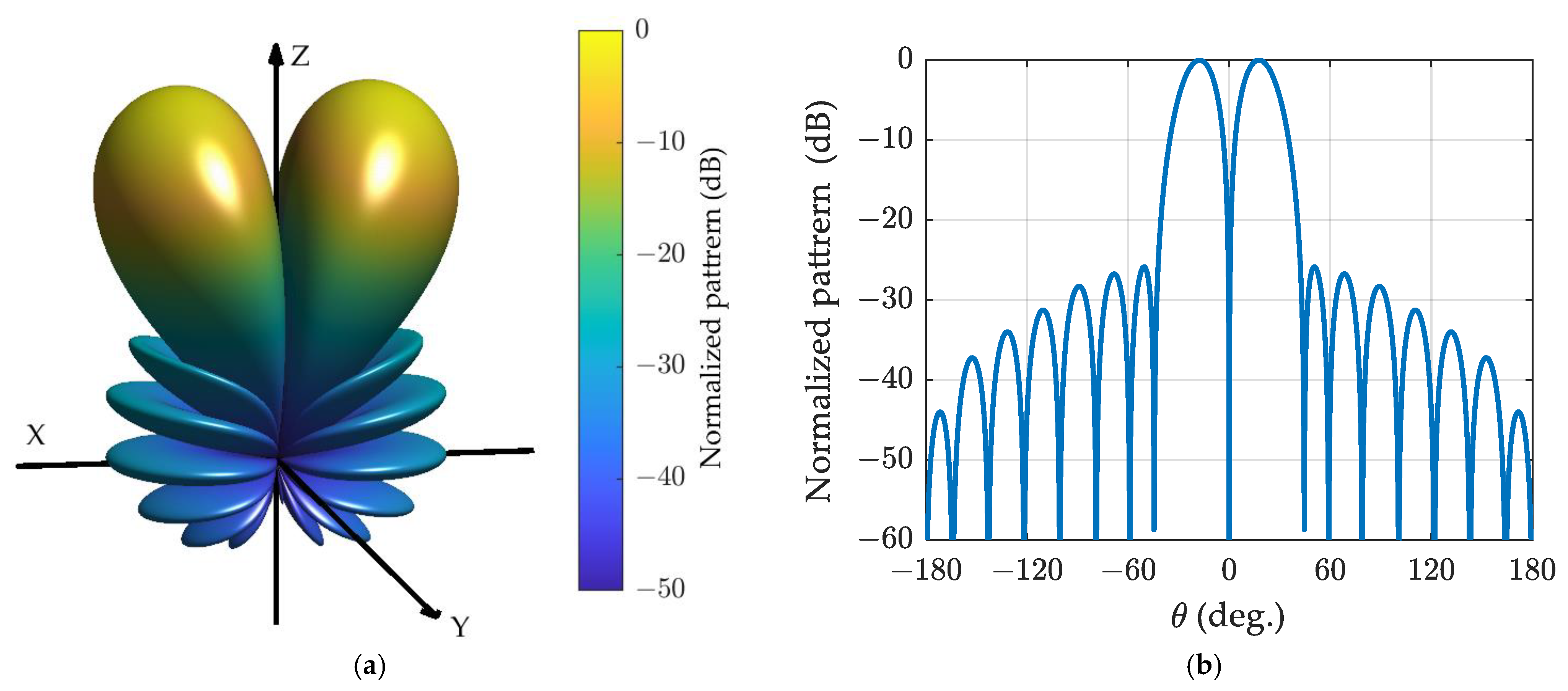
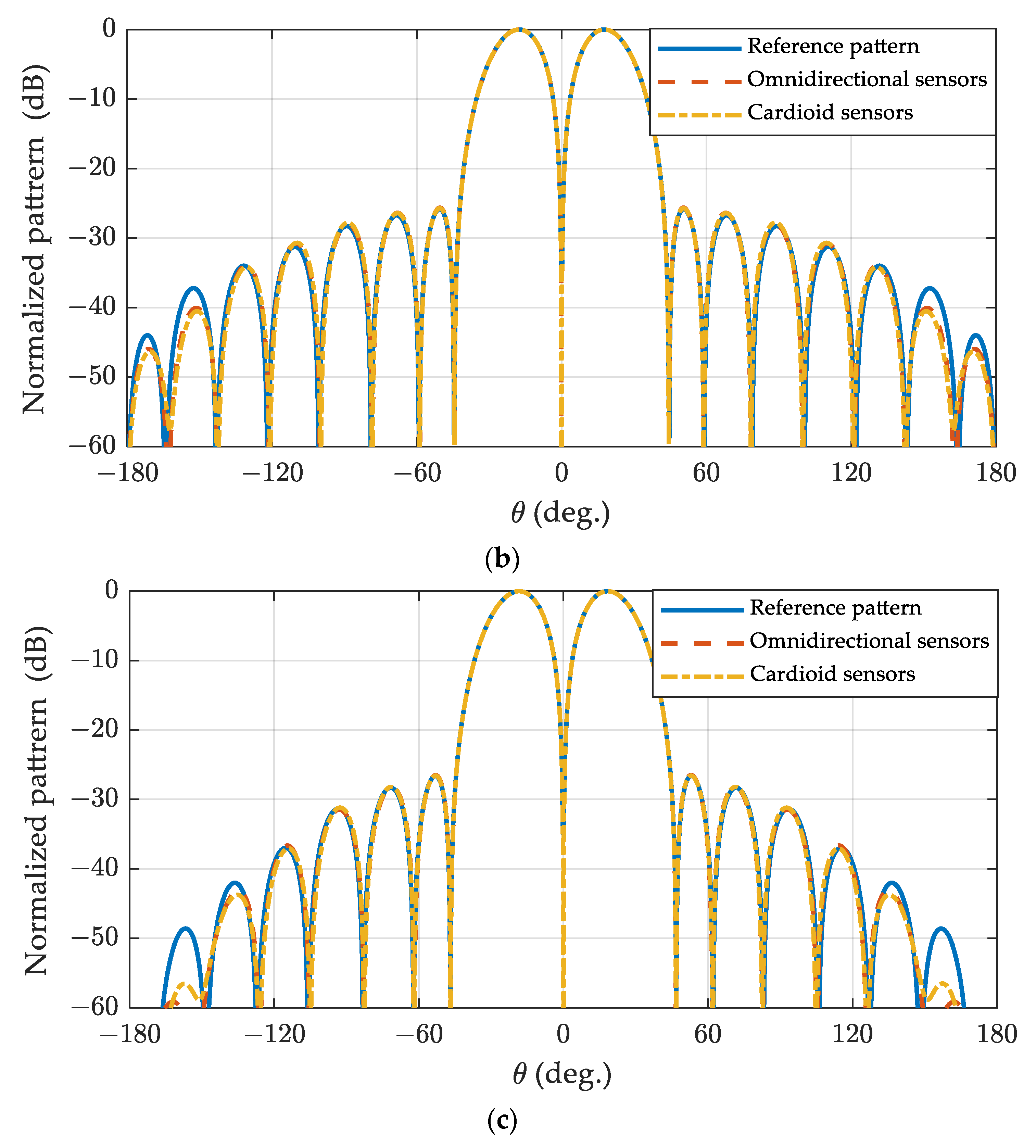
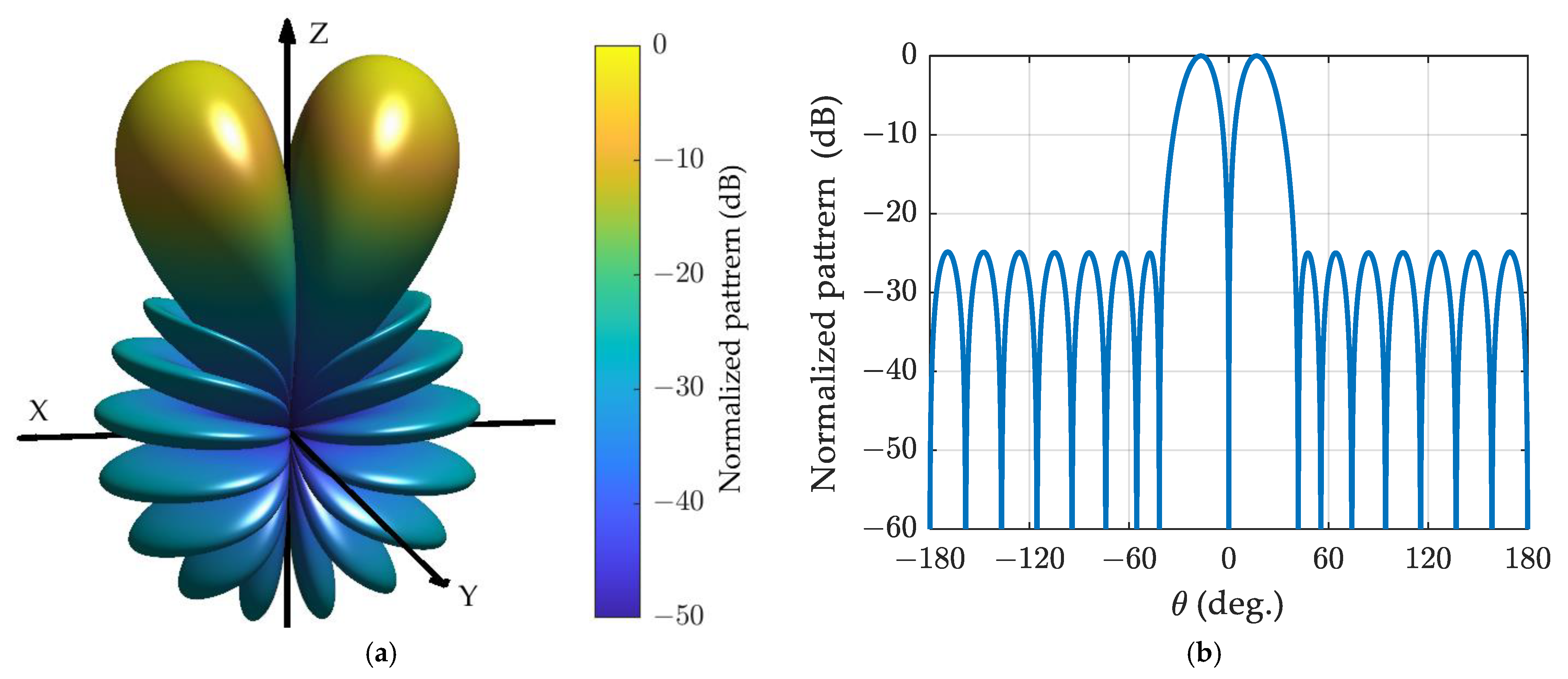
4.2. The Difference Pattern of the Spherical Aperture
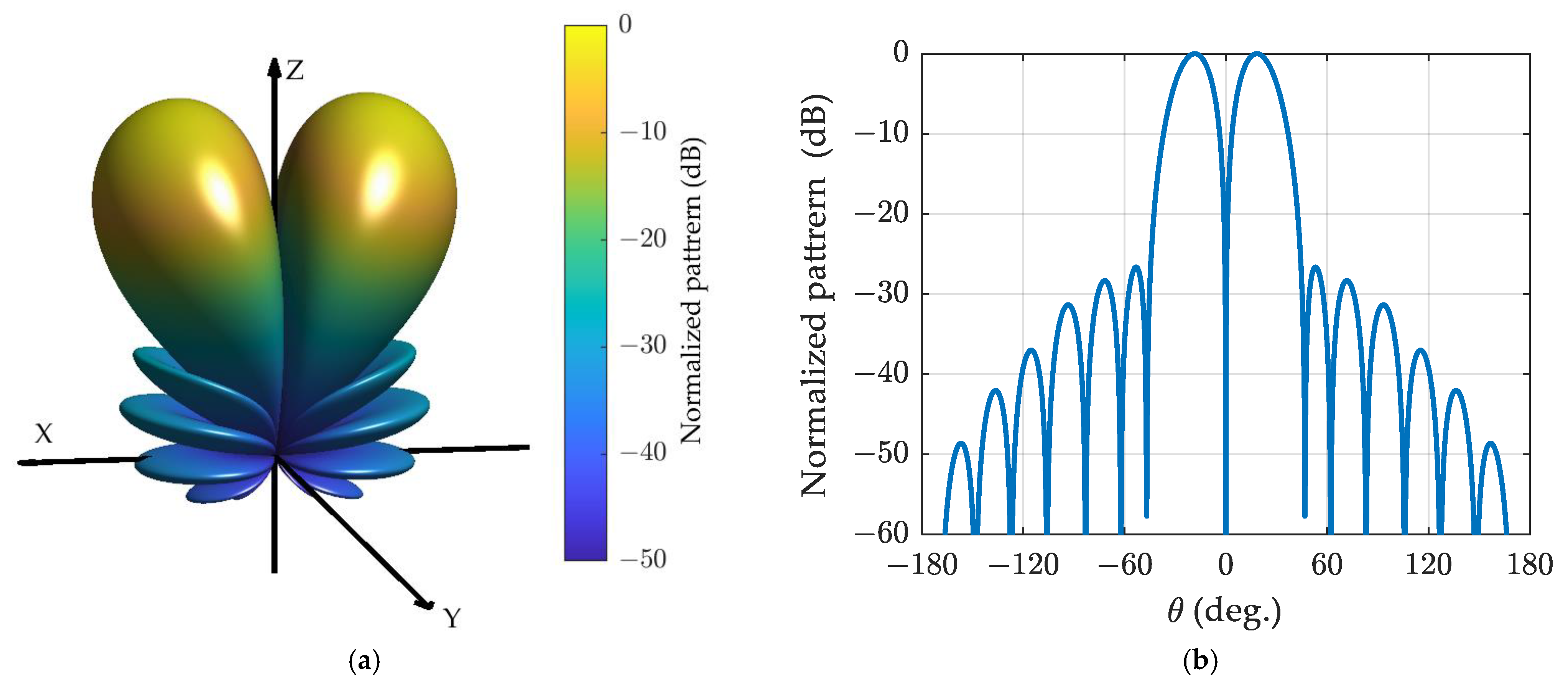
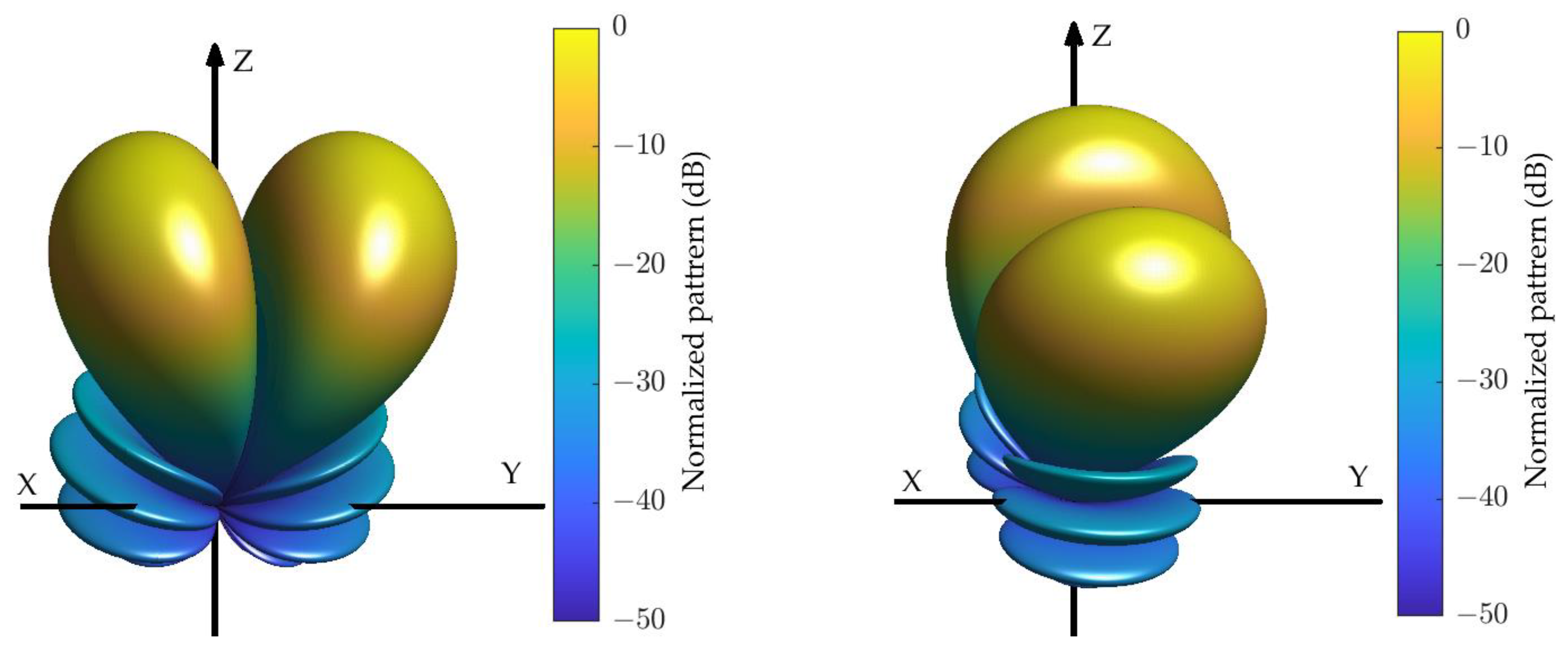
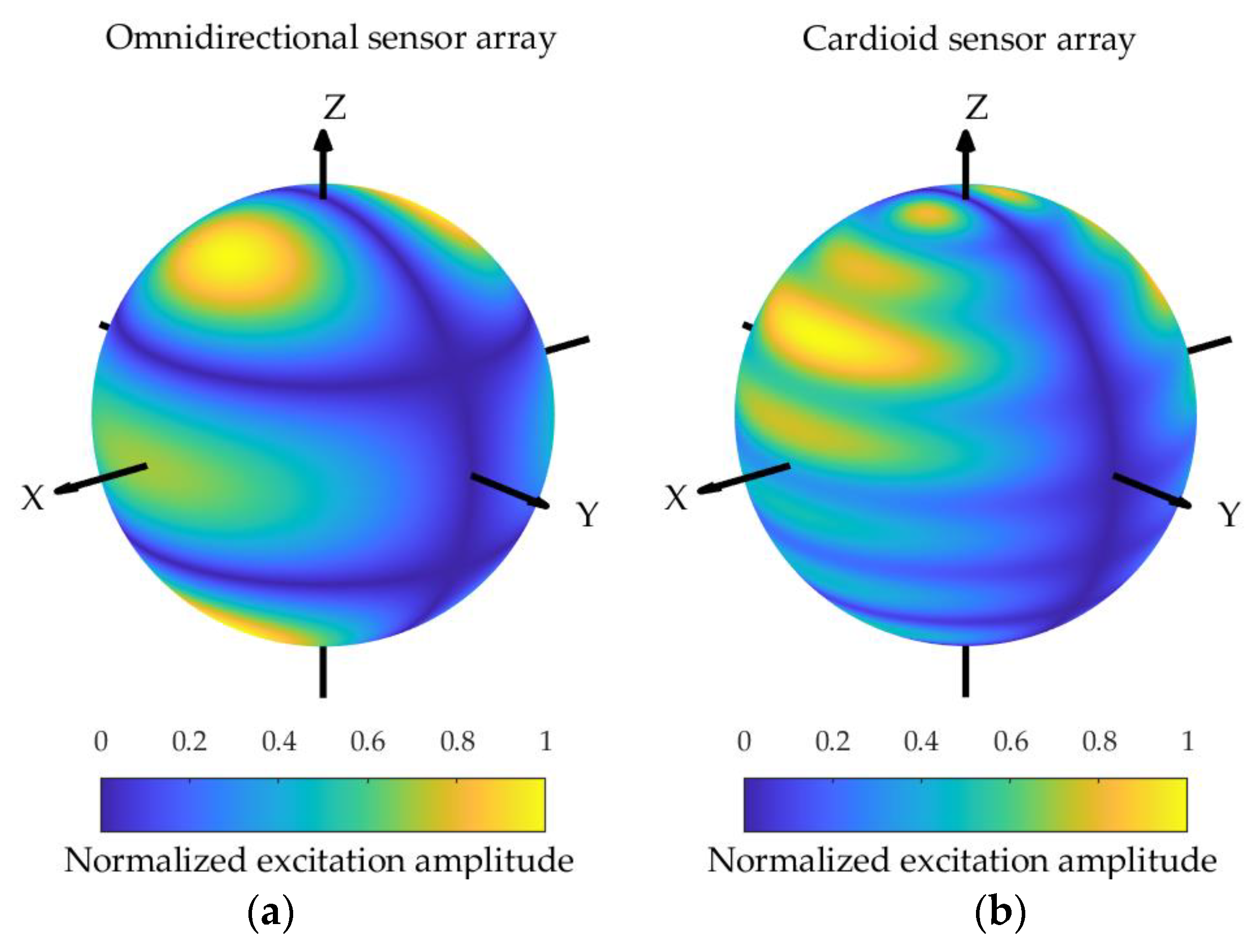
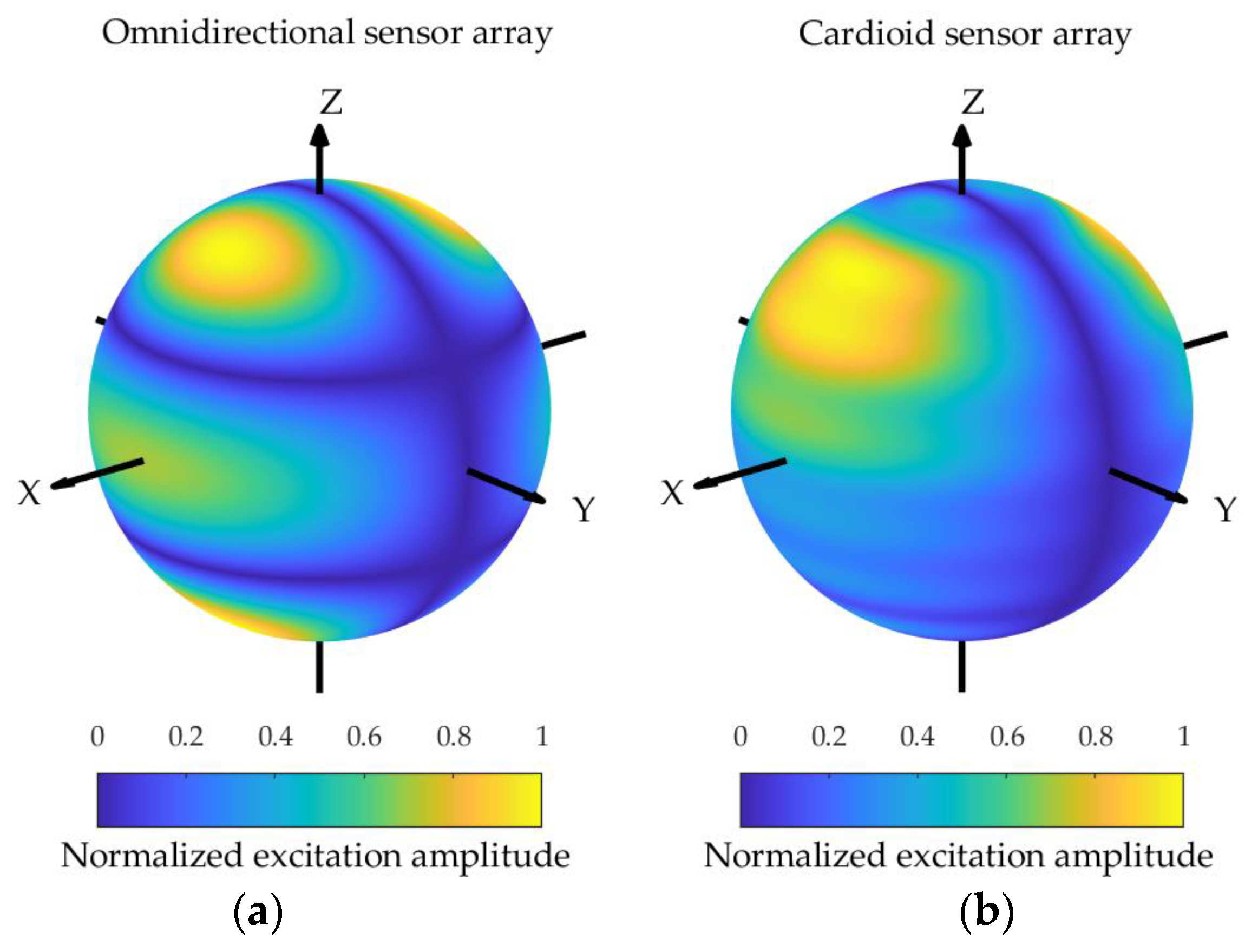
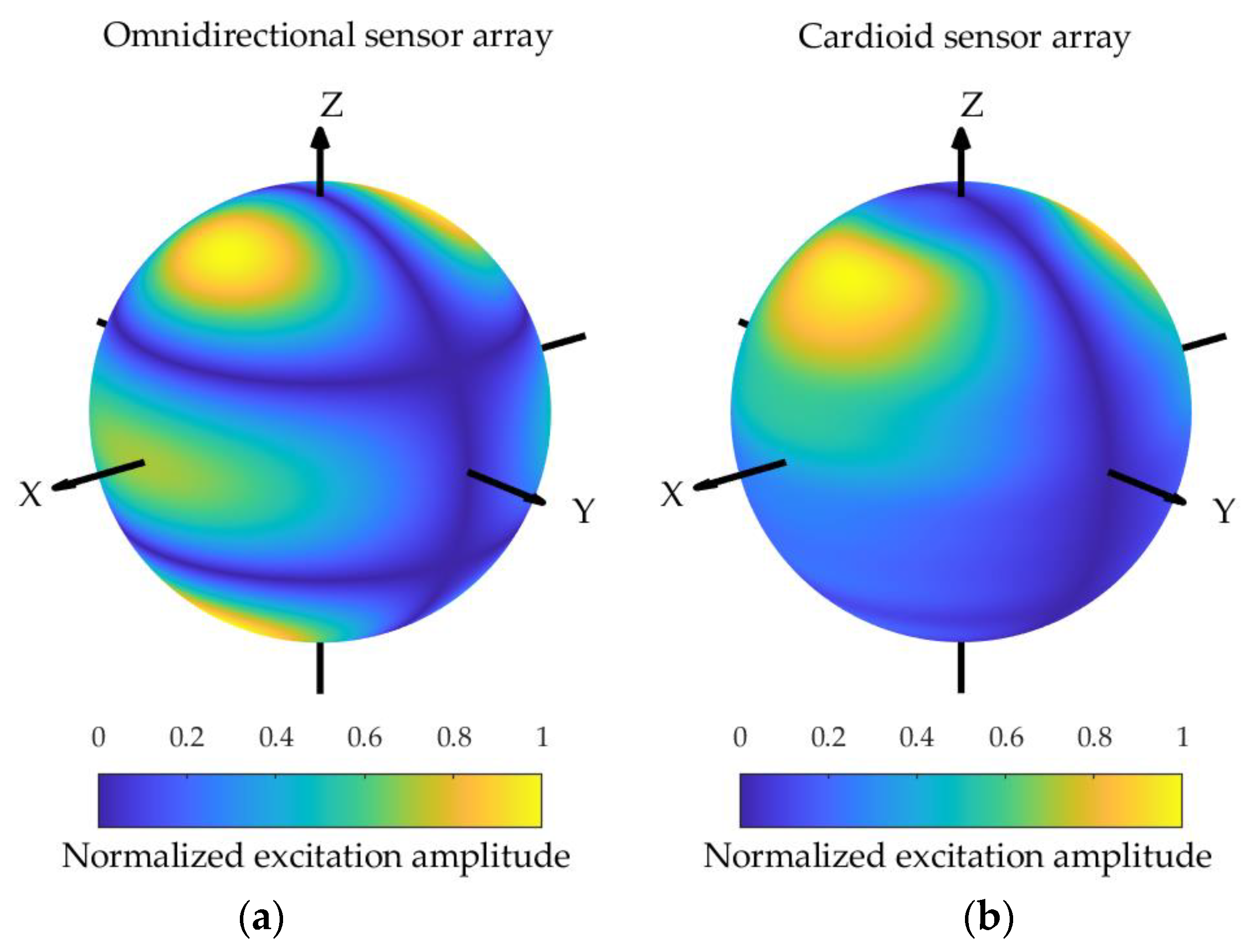
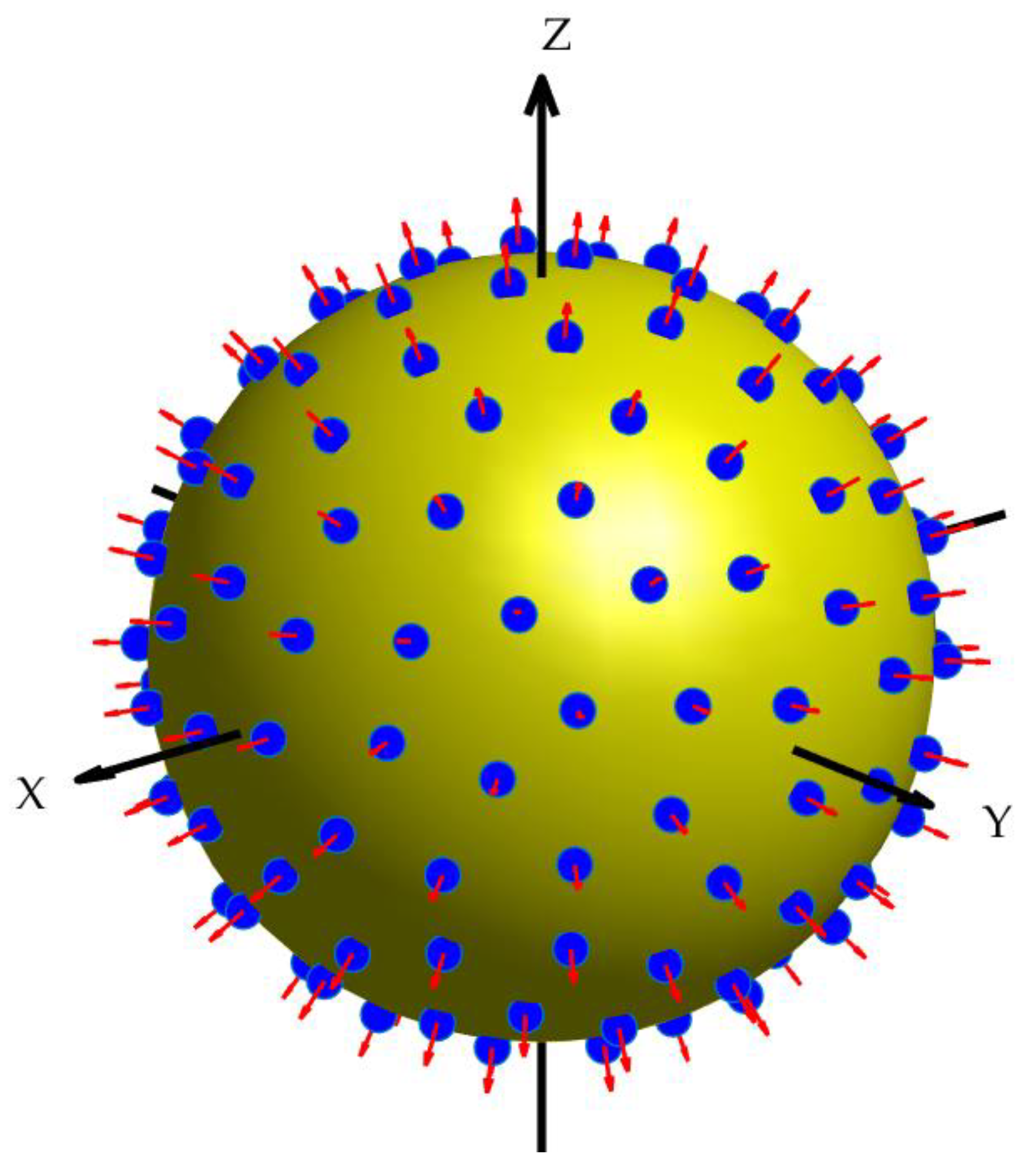
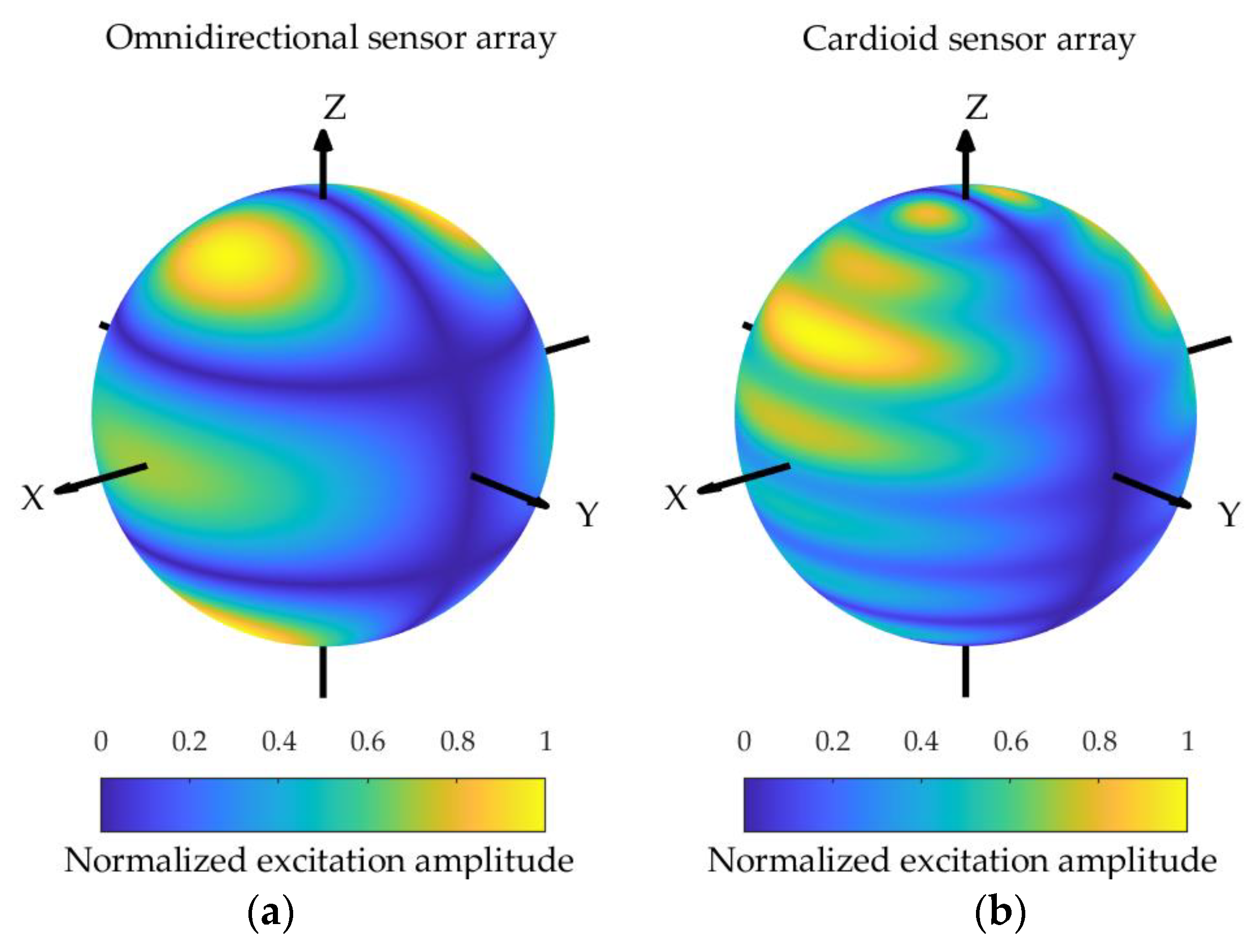
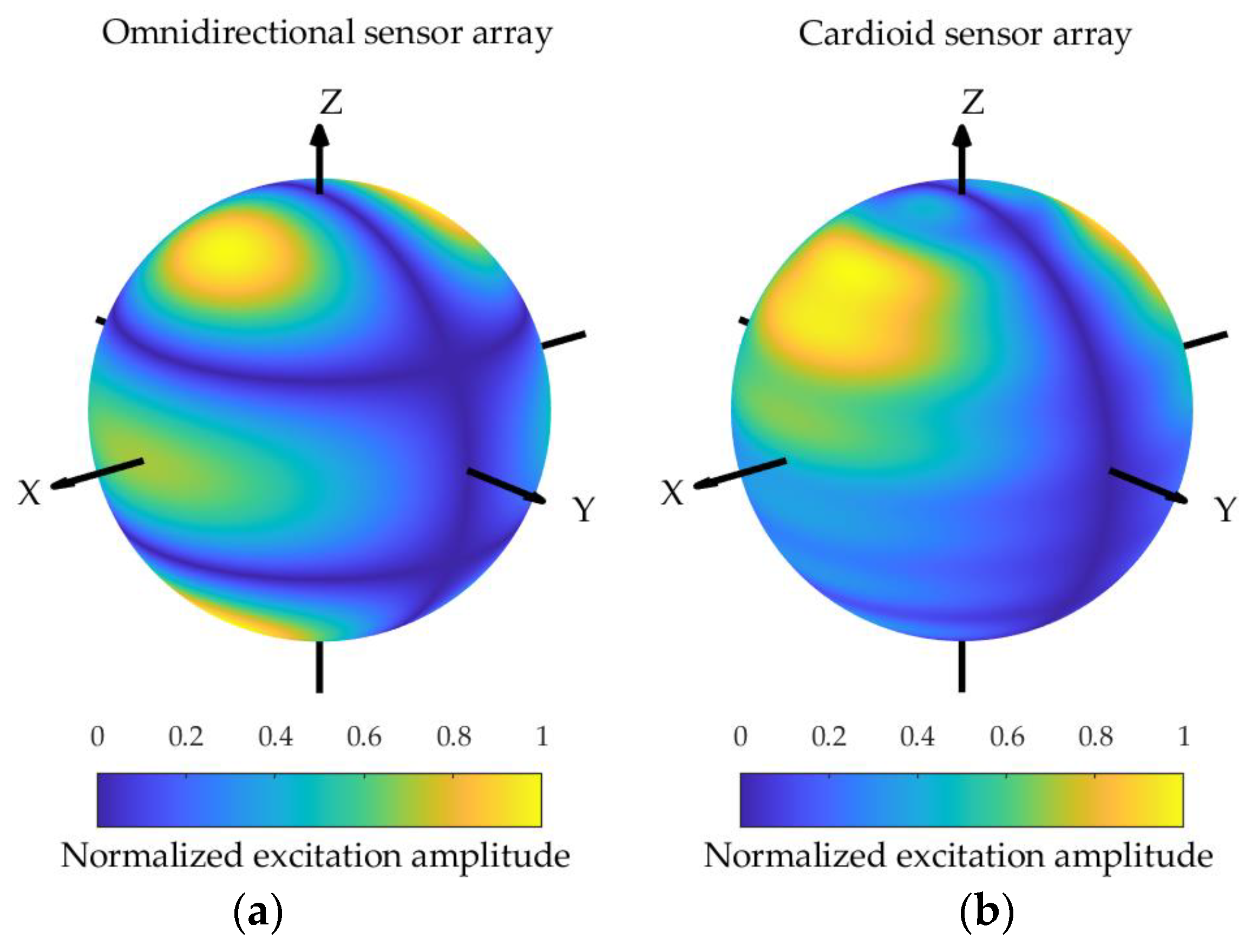
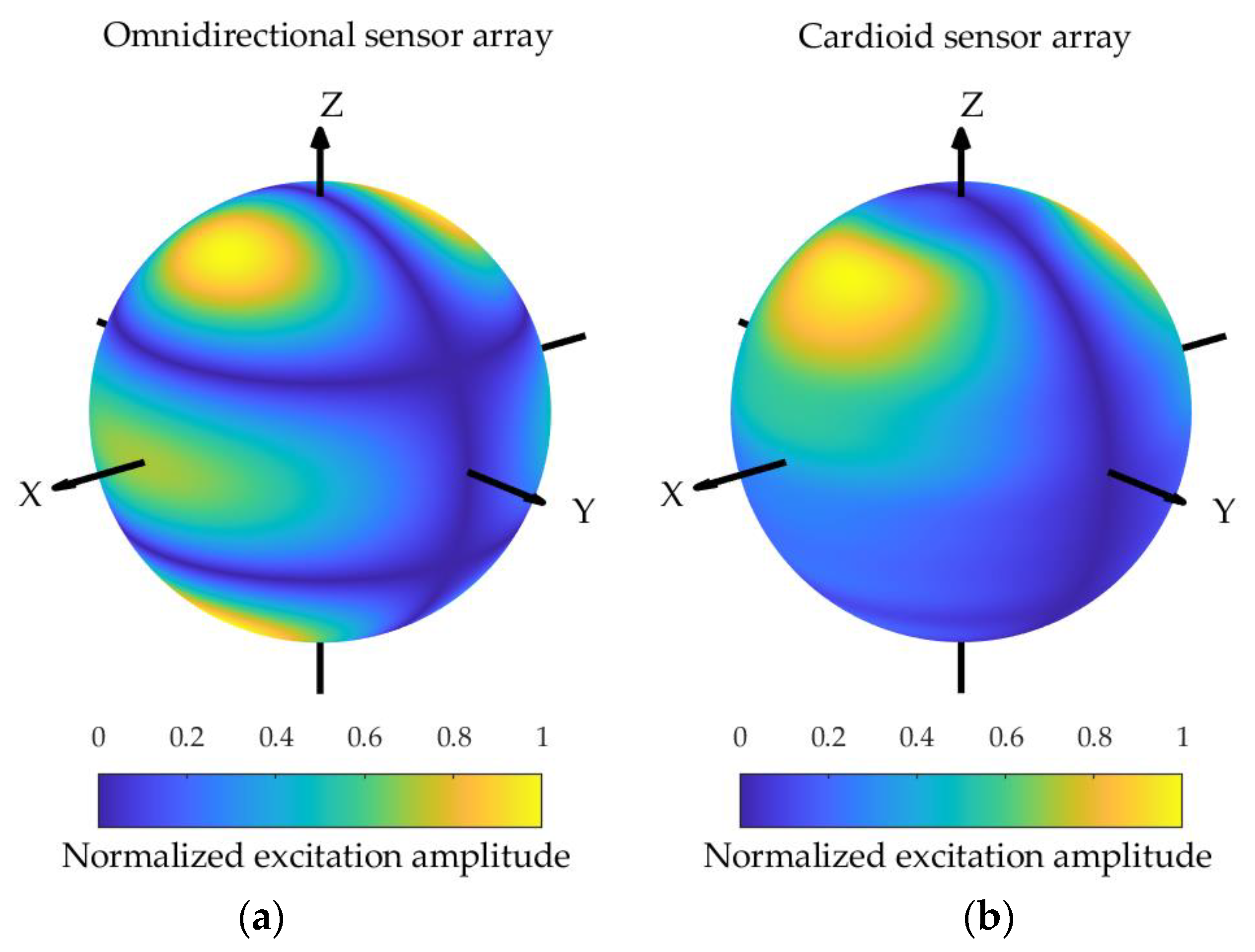
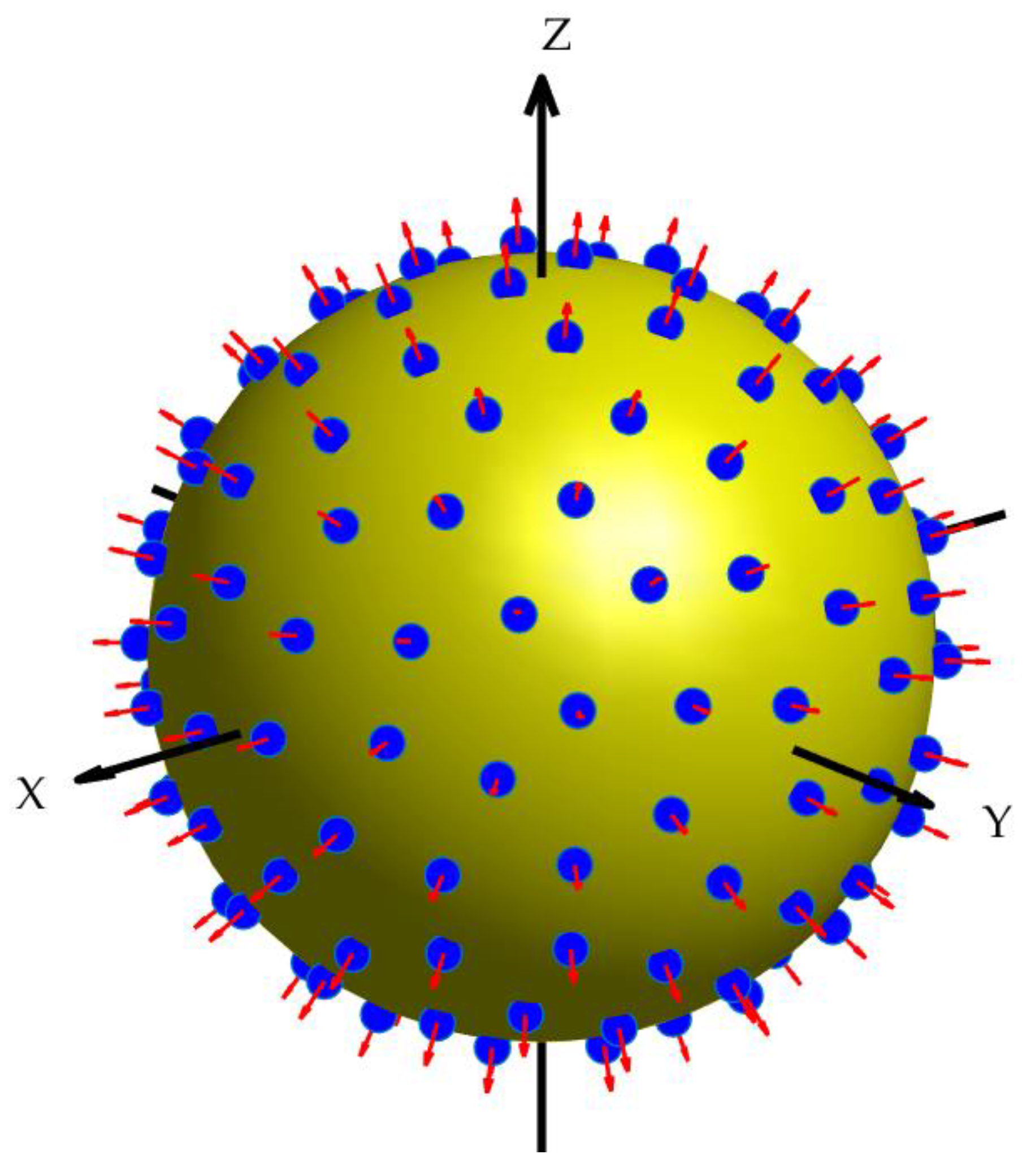
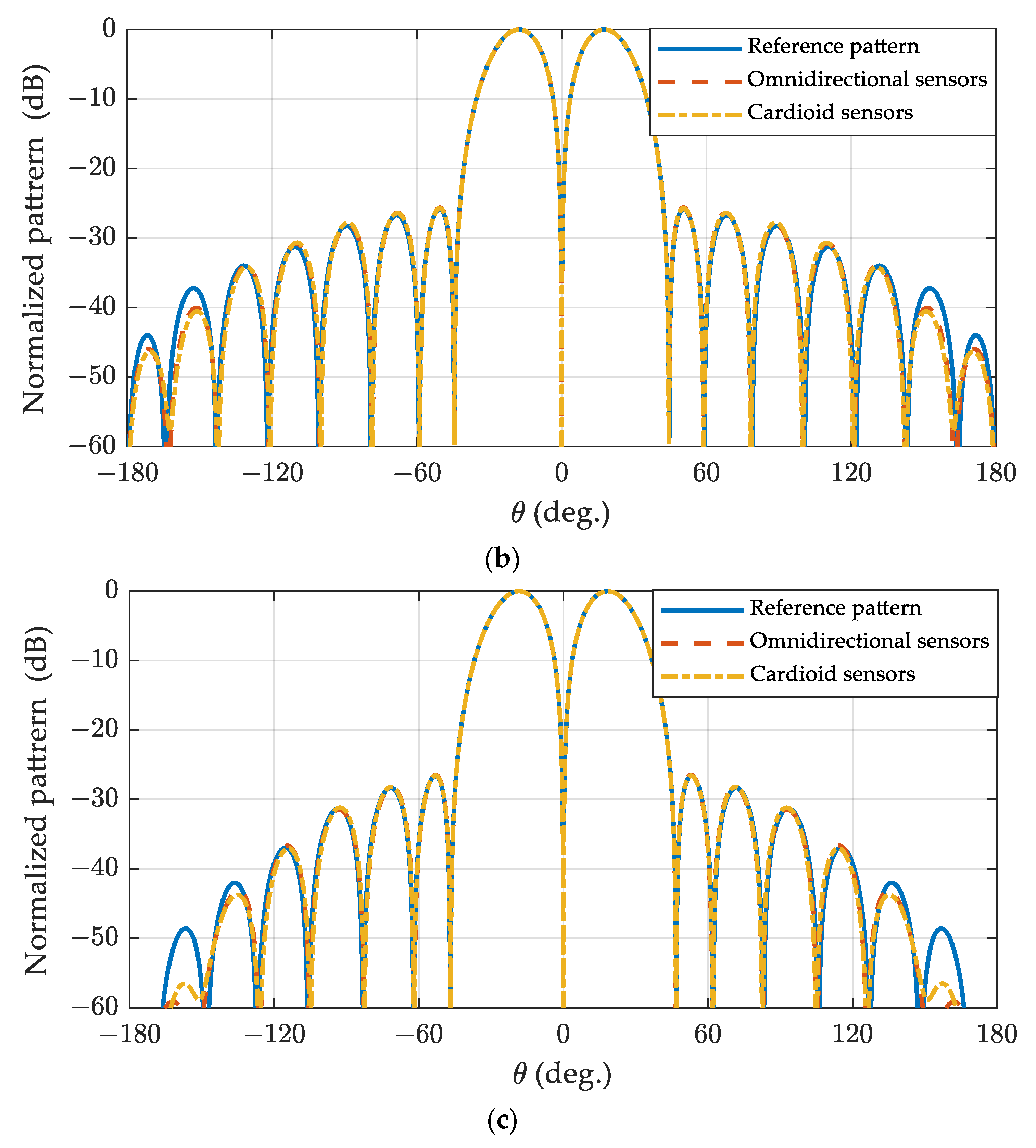
4.3. The Difference Pattern of the Spherical Sensor Array
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, Q.; Feng, J.; Fang, Y. Two-Dimensional DOA Estimation Using One-Dimensional Search for Spherical Arrays. Chin. J. Electron. 2019, 28, 1259–1264. [Google Scholar] [CrossRef]
- Famoriji, O.J.; Ogundepo, O.Y.; Qi, X. An Intelligent Deep Learning-Based Direction-of-Arrival Estimation Scheme Using Spherical Antenna Array with Unknown Mutual Coupling. IEEE Access 2020, 8, 179259–179271. [Google Scholar] [CrossRef]
- Famoriji, O.J.; Shongwe, T. Direction-of-Arrival Estimation of Electromagnetic Wave Impinging on Spherical Antenna Array in the Presence of Mutual Coupling Using a Multiple Signal Classification Method. Electronics 2021, 10, 2651. [Google Scholar] [CrossRef]
- John, F.O.; Thokozani, S. Source Localization of EM Waves in the Near-Field of Spherical Antenna Array in the Presence of Unknown Mutual Coupling. Wirel. Commun. Mob. Comput. 2021, 2021, 3237219. [Google Scholar]
- Lee, S.Y.; Chang, J.; Lee, S. Deep Learning-Enabled High-Resolution and Fast Sound Source Localization in Spherical Microphone Array System. IEEE Trans. Instrum. Meas. 2022, 71, 2506112. [Google Scholar] [CrossRef]
- Ryoo, W.; Sung, W. Beamforming Using Uniform Spherical Arrays: Array Construction, Beam Characteristics, and Multi-Rank Transmission. IEEE Access 2021, 9, 38731–38741. [Google Scholar] [CrossRef]
- Yu, S.; Kou, N.; Jiang, J.; Ding, Z.; Zhang, Z. Beam Steering of Orbital Angular Momentum Vortex Waves with Spherical Conformal Array. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 1244–1248. [Google Scholar] [CrossRef]
- Kumar, B.P.; Kumar, C.; Kumar, V.S.; Srinivasan, V.V. Reliability Considerations of Spherical Phased Array Antenna for Satellites. IEEE Trans. Aerosp. Electron. Syst. 2017, 54, 1381–1391. [Google Scholar] [CrossRef]
- Lin, H.S.; Cheng, Y.J.; Fan, Y. Synthesis of Difference Patterns for 3-D Conformal Beam-Scanning Arrays with Asymmetric Radiation Aperture. IEEE Trans. Antennas Propag. 2022, 70, 8040–8050. [Google Scholar] [CrossRef]
- Haupt, R.L. A sparse hammersley element distribution on a spherical antenna array for hemispherical radar coverage. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; IEEE: Seattle, WA, USA, 2017; pp. 1383–1385. [Google Scholar]
- Rafaely, B. Fundamentals of Spherical Array Processing; Springer International Publishing: Cham, Switzerland, 2019. [Google Scholar]
- Tomasic, B.; Turtle, J.; Liu, S. Spherical Arrays—Design Considerations. In Proceedings of the 18th International Conference on Applied Electromagnetics and Communications, Dubrovnik, Croatia, 12–14 October 2005; IEEE: Dubrovnik, Croatia, 2005; pp. 1–8. [Google Scholar]
- Mahmood, M.; Koc, A.; Le-Ngoc, T. 3-D Antenna Array Structures for Millimeter Wave Multi-User Massive MIMO Hybrid Precoder Design: A Performance Comparison. IEEE Commun. Lett. 2022, 26, 1393–1397. [Google Scholar] [CrossRef]
- Mailloux, R. Phased Array Antenna Handbook, 3rd ed.; Artech: London, UK, 2017. [Google Scholar]
- McNamara, A.D. Performance of Zolotarev and modified-Zolotarev difference pattern array distributions. IEE Proc. Microw. Antennas Propag. 2002, 141, 37–44. [Google Scholar] [CrossRef]
- McNamara, D. Direct synthesis of optimum difference patterns for discrete linear arrays using zolotarev distributions. IEE Proceedings. Part H 1993, 140, 495–500. [Google Scholar] [CrossRef]
- Feng, R.; Uysal, F.; Yarovoy, A. Target Localization Using MIMO-Monopulse: Application on 79 GHz FMCW Automotive Radar. In Proceedings of the 15th European Radar Conference (EuRAD), Madrid, Spain, 26–28 September 2018; IEEE: Madrid, Spain, 2018; pp. 59–62. [Google Scholar]
- Azevedo, A.; Ren, X.F.; Casimiro, A. Synthesis of Zolotarev Patterns. In Proceedings of the International Symposium on Microwave, Antenna, Propagation and EMC Technologies for Wireless Communications, Hangzhou, China, 16–17 August 2007; IEEE: Hangzhou, China, 2007; pp. 727–730. [Google Scholar]
- Zinka, S.R.; Kim, J.P. On the Generalization of Taylor and Bayliss n-bar Array Distributions. IEEE Trans. Antennas Propag. 2012, 60, 1152–1157. [Google Scholar] [CrossRef]
- Liu, G.; Zhu, H.; Wang, K.; Qiu, Y.; Mou, J.; Zheng, P.; Wei, G. Low-Sidelobe Pattern Synthesis for Sparse Conformal Arrays Based on Multiagent Genetic Algorithm. In Proceedings of the IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting (AP-S/URSI), Denver, CO, USA, 10–15 July 2022; IEEE: Denver, CO, USA, 2022; pp. 1044–1045. [Google Scholar]
- Li, M.; Liu, Y.; Chen, S.-L.; Hu, J.; Guo, Y.J. Synthesizing Shaped-Beam Cylindrical Conformal Array Considering Mutual Coupling Using Refined Rotation/Phase Optimization. IEEE Trans. Antennas Propag. 2022, 70, 10543–10553. [Google Scholar] [CrossRef]
- Li, X.J.; Miao, J.G.; Kuang, H.X.; Li, C.Y.; Liu, J.Q.; Zhou, S.G.; Liu, J. Pattern Synthesis of Conformal antenna Array based on Convex Optimization Model. In Proceedings of the IEEE MTT-S International Microwave Workshop Series on Advanced Materials and Processes for RF and THz Applications (IMWS-AMP), Suzhou, China, 29–31 July 2020; IEEE: Suzhou, China, 2020; pp. 1–3. [Google Scholar]
- Liu, Y.; Yang, Y.; Wu, P.; Ma, X.; Li, M.; Xu, K.-D.; Guo, Y.J. Synthesis of Multibeam Sparse Circular-Arc Antenna Arrays Employing Refined Extended Alternating Convex Optimization. IEEE Trans. Antennas Propag. 2021, 69, 566–571. [Google Scholar] [CrossRef]
- Dohmen, C.; Odendaal, J.W.; Joubert, J. Synthesis of Conformal Arrays with Optimized Polarization. IEEE Trans. Antennas Propag. 2007, 55, 2922–2925. [Google Scholar] [CrossRef]
- Dinnichert, M. Full polarimetric pattern synthesis for an active conformal array. In Proceedings of the IEEE International Conference on Phased Array Systems & Technology, Dana Point, CA, USA, 21–25 May 2000; IEEE: Dana Point, CA, USA, 2000; pp. 415–419. [Google Scholar]
- Huang, Z.; Zhou, J.; Zhang, H. Full polarimetric sum and difference patterns synthesis for conformal array. Electron. Lett. 2015, 51, 602–604. [Google Scholar] [CrossRef]
- Lin, H.S.; Cheng, Y.J.; Yang, H.N. Synthesis of Wide-Angle Difference Pattern with Low Side-lobe Level on Asymmetric Aperture of Hemispherical Conformal Array Antennas. In Proceedings of the IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting (APS/URSI), Singapore, 4–10 December 2021; IEEE: Singapore, 2021; pp. 971–972. [Google Scholar]
- De Witte, E.; Griffiths, H.; Brennan, P. Phase mode processing for spherical antenna arrays. Electron. Lett. 2003, 39, 1430–1431. [Google Scholar] [CrossRef]
- Koretz, A.; Rafaely, B. Dolph–Chebyshev Beampattern Design for Spherical Arrays. IEEE Trans. Signal Process. 2009, 57, 2417–2420. [Google Scholar] [CrossRef]
- Hafizovic, I.; Nilsen, C.-I.C.; Holm, S. Transformation Between Uniform Linear and Spherical Microphone Arrays with Symmetric Responses. IEEE Trans. Audio Speech Lang. Process. 2011, 20, 1189–1195. [Google Scholar] [CrossRef]
- Huang, Z.; Sun, Y. Difference Pattern Synthesis for Spherical Arrays. In Proceedings of the IEEE Radar Conference (RadarConf), Florence, Italy, 21–25 September 2020; IEEE: Florence, Italy, 2020; pp. 1–4. [Google Scholar]
- Goossens, R.; Bogaert, I.; Rogier, H. Phase-Mode Processing for Spherical Antenna Arrays with a Finite Number of Antenna Elements and Including Mutual Coupling. IEEE Trans. Antennas Propag. 2009, 57, 3783–3790. [Google Scholar] [CrossRef]
- Costa, M.; Richter, A.; Koivunen, V. Unified Array Manifold Decomposition Based on Spherical Harmonics and 2-D Fourier Basis. IEEE Trans. Signal Process. 2010, 58, 4634–4645. [Google Scholar] [CrossRef]
- Igor, M.; Igor, M. Elliptic Integrals and Functions. MATLAB Central File Exchange. 2023. Available online: https://www.mathworks.com/matlabcentral/fileexchange/8805-elliptic-integrals-and-functions (accessed on 1 August 2023).
- Bucci, O.; D’Urso, M.; Isernia, T. Optimal synthesis of difference patterns subject to arbitrary sidelobe bounds by using arbitrary array antennas. IEE Proc. Microw. Antennas Propag. 2005, 152, 129–137. [Google Scholar] [CrossRef]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, Version 2.2. January 2020. Available online: https://cvxr.com/cvx (accessed on 1 August 2023).
- Hardin, R.H.; Sloane, N.J.A. McLaren’s improved snub cube and other new spherical designs in three dimensions. Discret. Comput. Geom. 1996, 15, 429–441. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Z.; Chen, M.; Li, X.; Xie, S.; Ma, G.; Tian, J. On Difference Pattern Synthesis for Spherical Sensor Arrays. Sensors 2024, 24, 2361. https://doi.org/10.3390/s24072361
Huang Z, Chen M, Li X, Xie S, Ma G, Tian J. On Difference Pattern Synthesis for Spherical Sensor Arrays. Sensors. 2024; 24(7):2361. https://doi.org/10.3390/s24072361
Chicago/Turabian StyleHuang, Zhijiang, Maolin Chen, Xianglu Li, Shunqin Xie, Guoning Ma, and Jie Tian. 2024. "On Difference Pattern Synthesis for Spherical Sensor Arrays" Sensors 24, no. 7: 2361. https://doi.org/10.3390/s24072361
APA StyleHuang, Z., Chen, M., Li, X., Xie, S., Ma, G., & Tian, J. (2024). On Difference Pattern Synthesis for Spherical Sensor Arrays. Sensors, 24(7), 2361. https://doi.org/10.3390/s24072361