
Ground Force Precision Calibration Method for Customized Piezoresistance Sensing Flexible Force Measurement Mat




Abstract
:1. Introduction
2. Materials and Methods
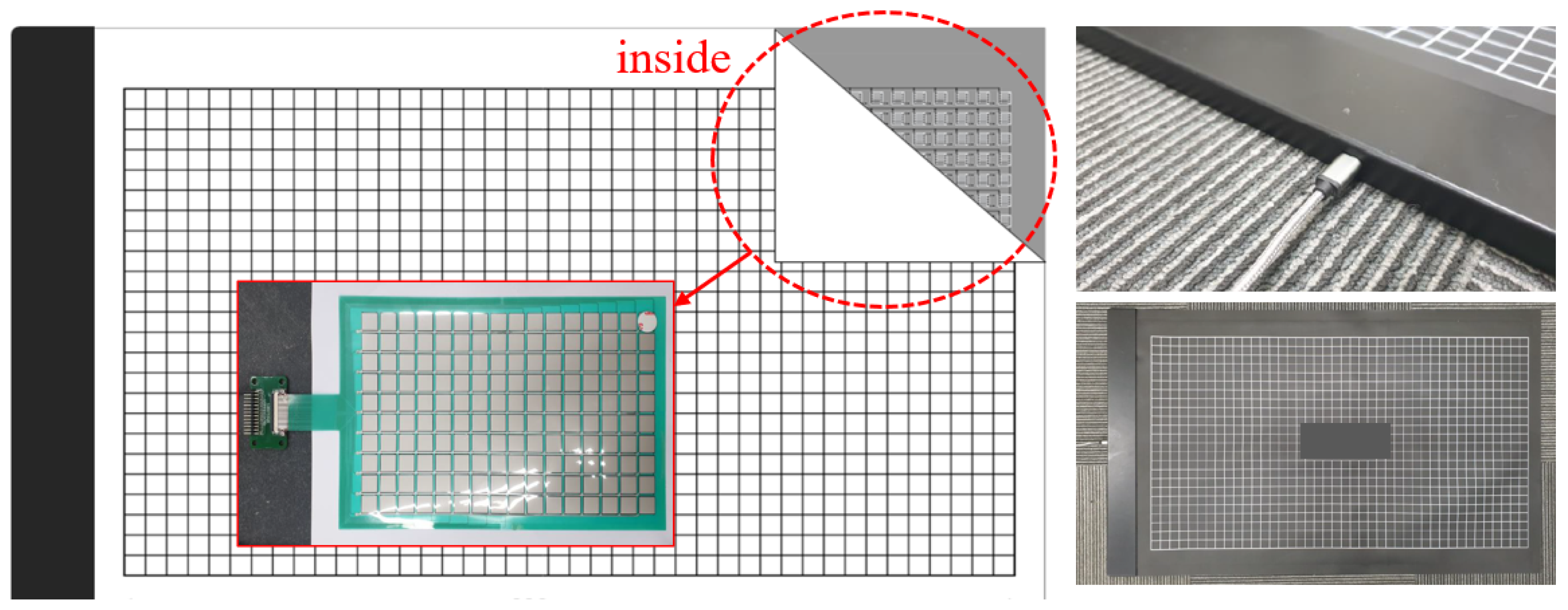
2.1. Introduction of Flexible Force Measurement Mat
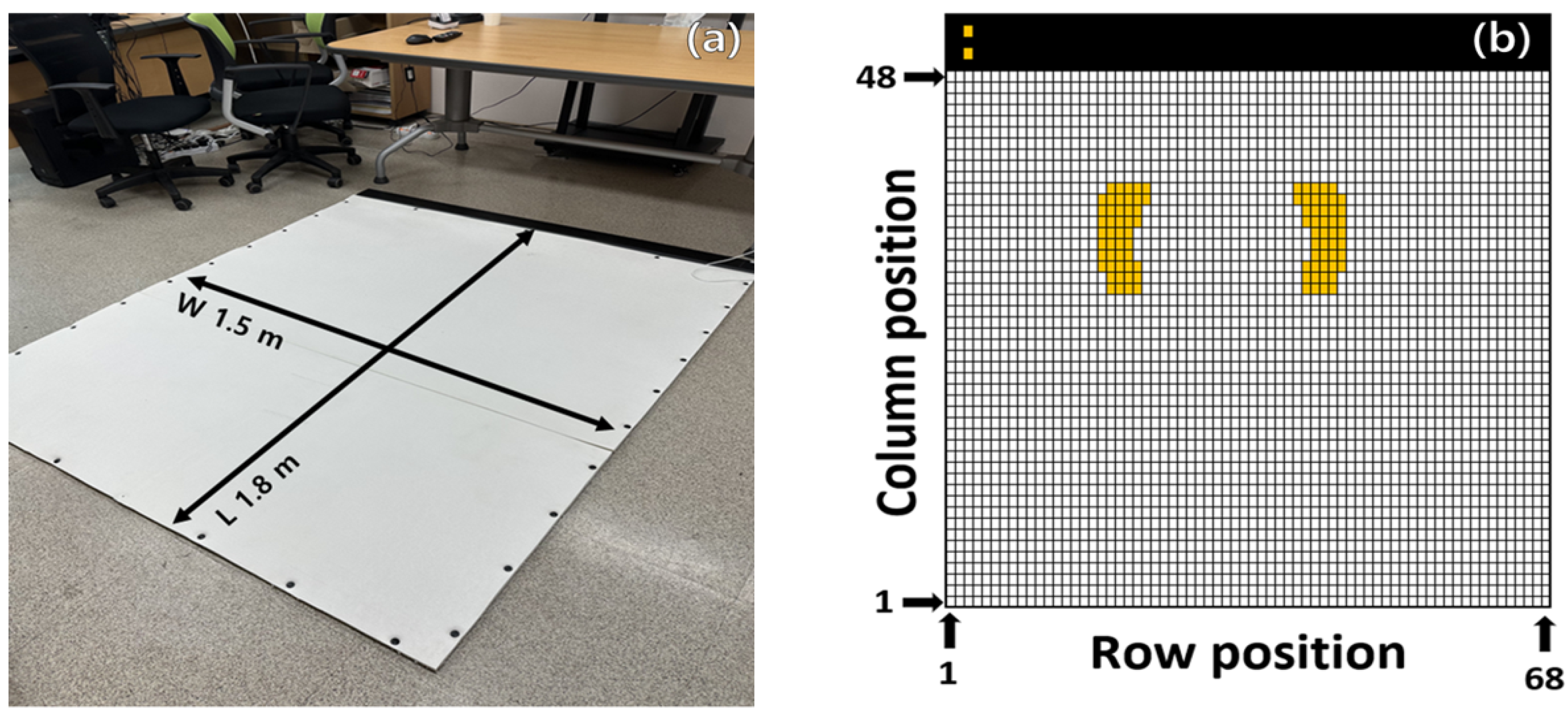
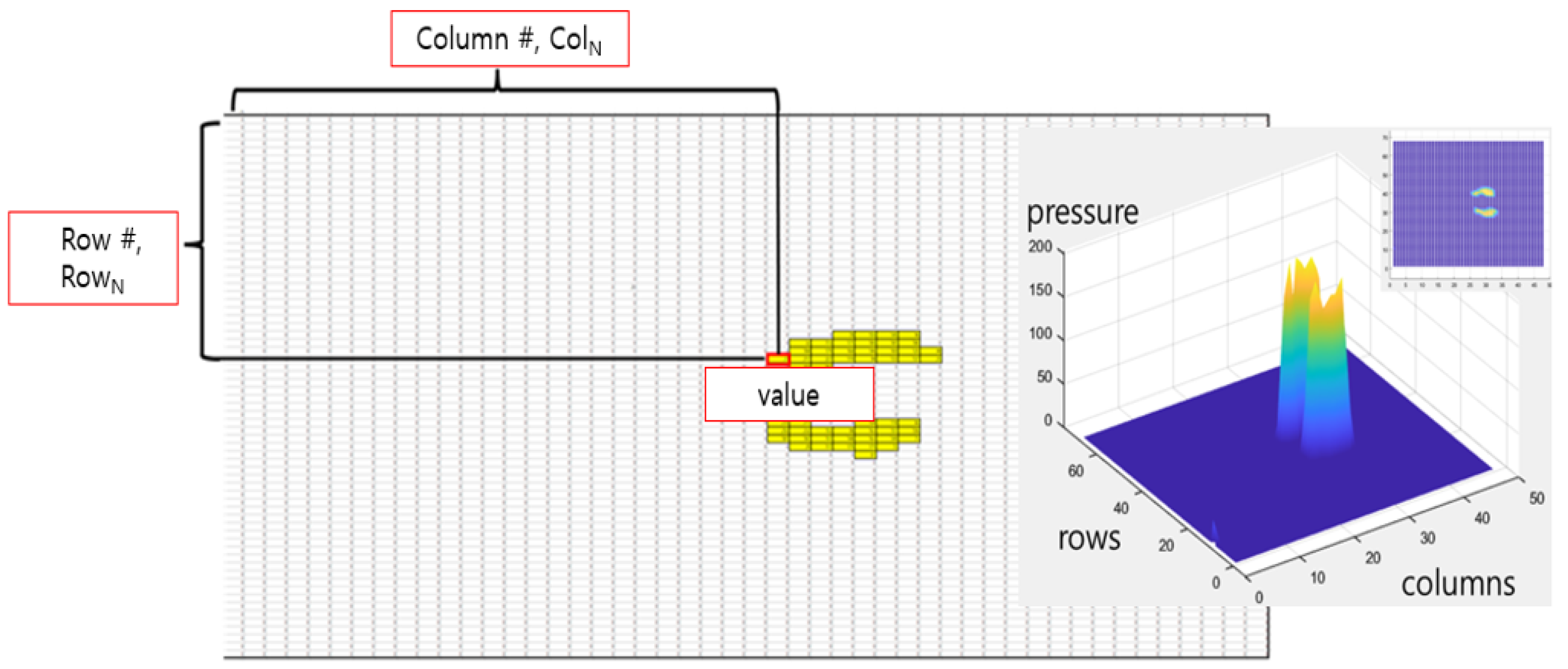
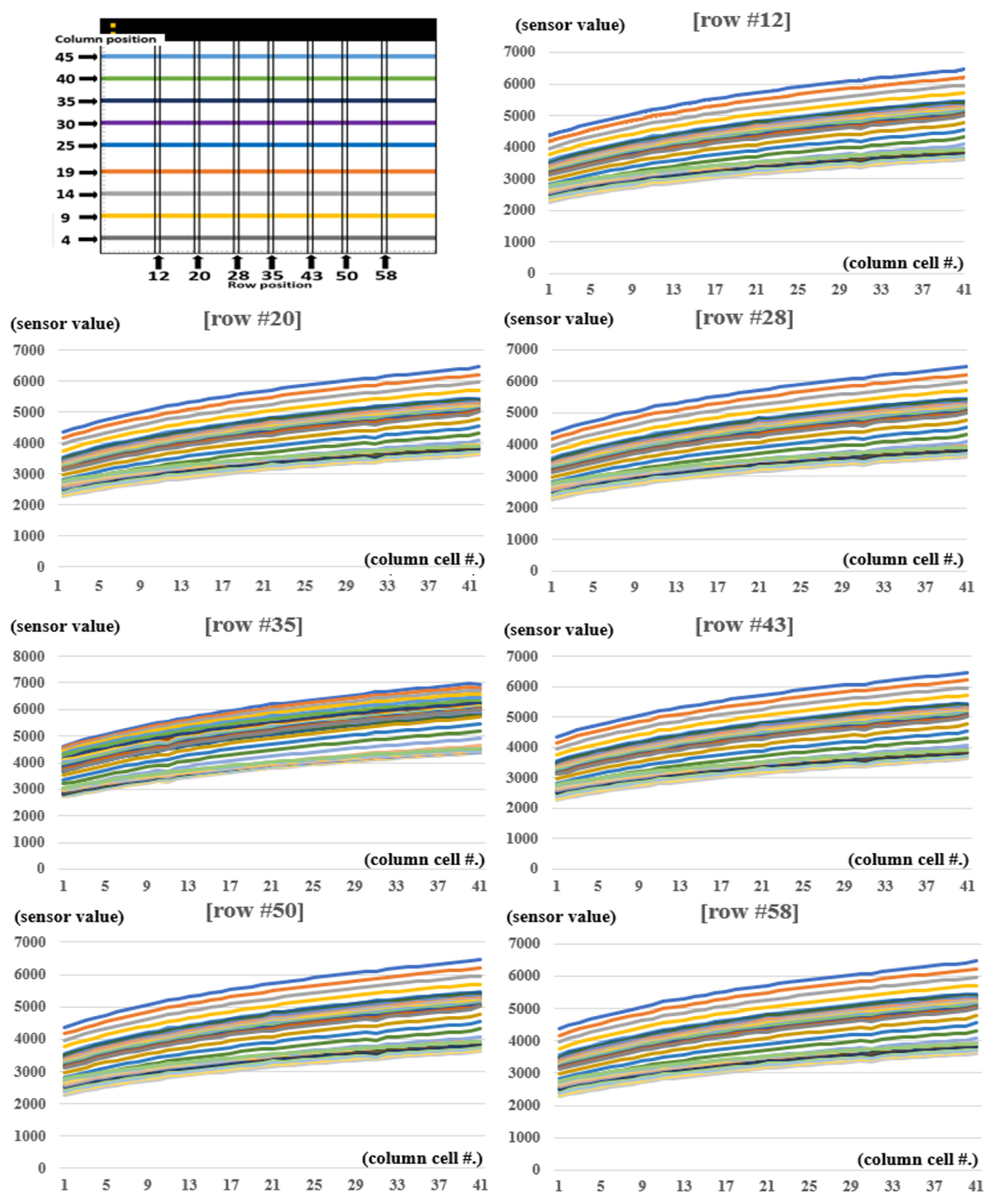
2.2. Verifying Flexible Force Mat Acquisition Data
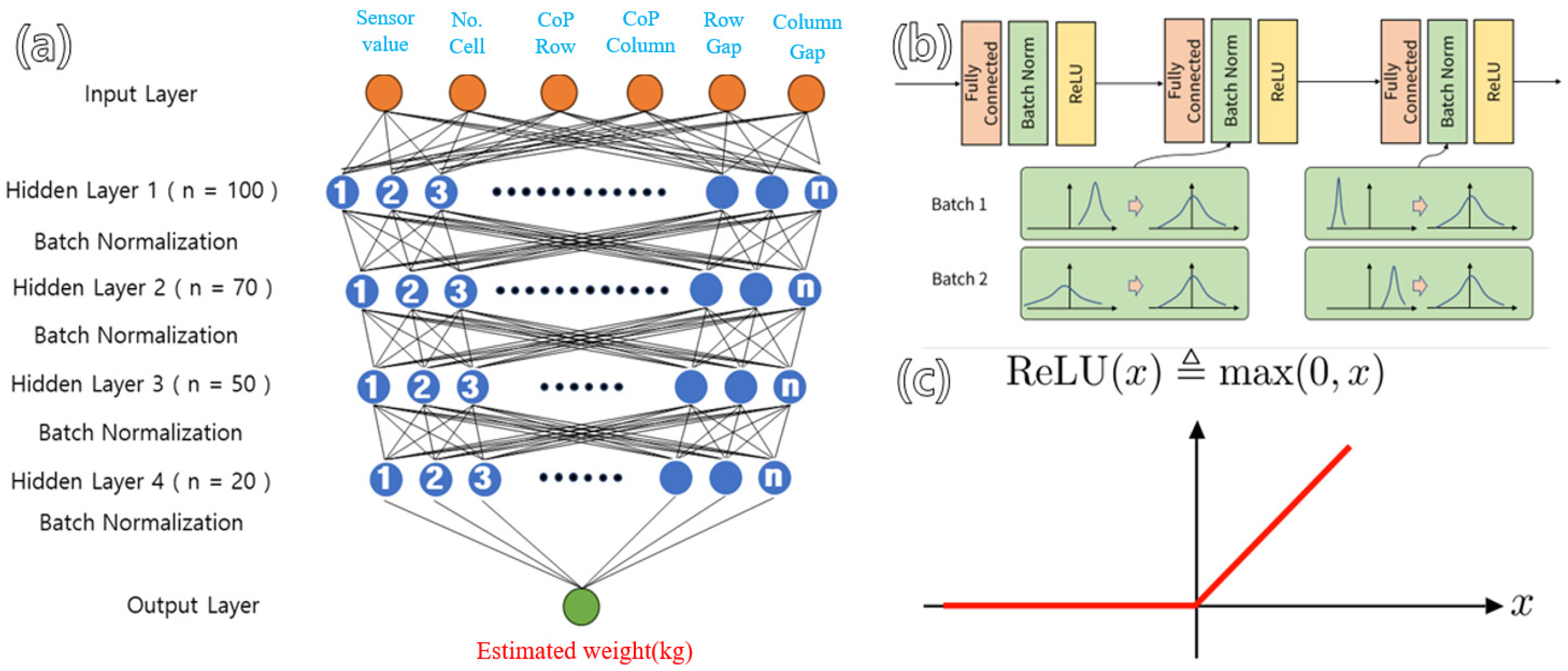
2.3. Development an Algorithm for Flexible Force Mat Weight Estimation
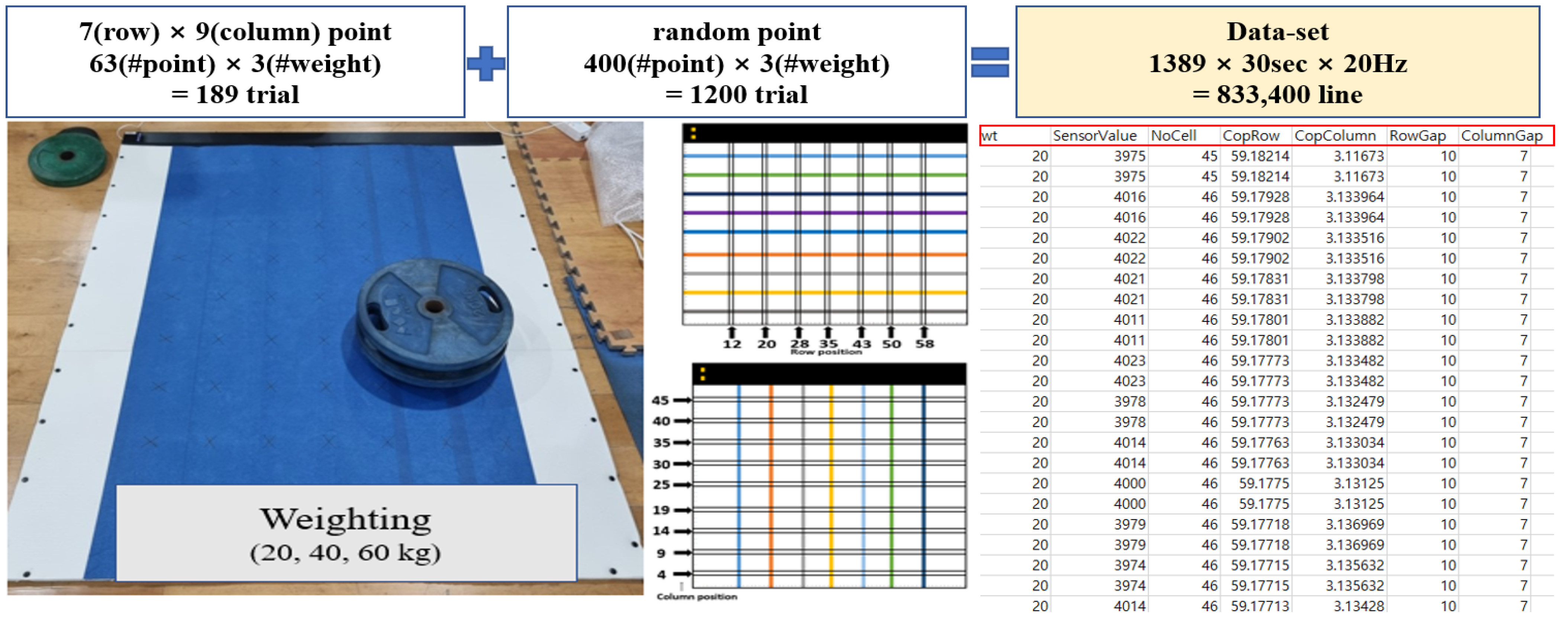
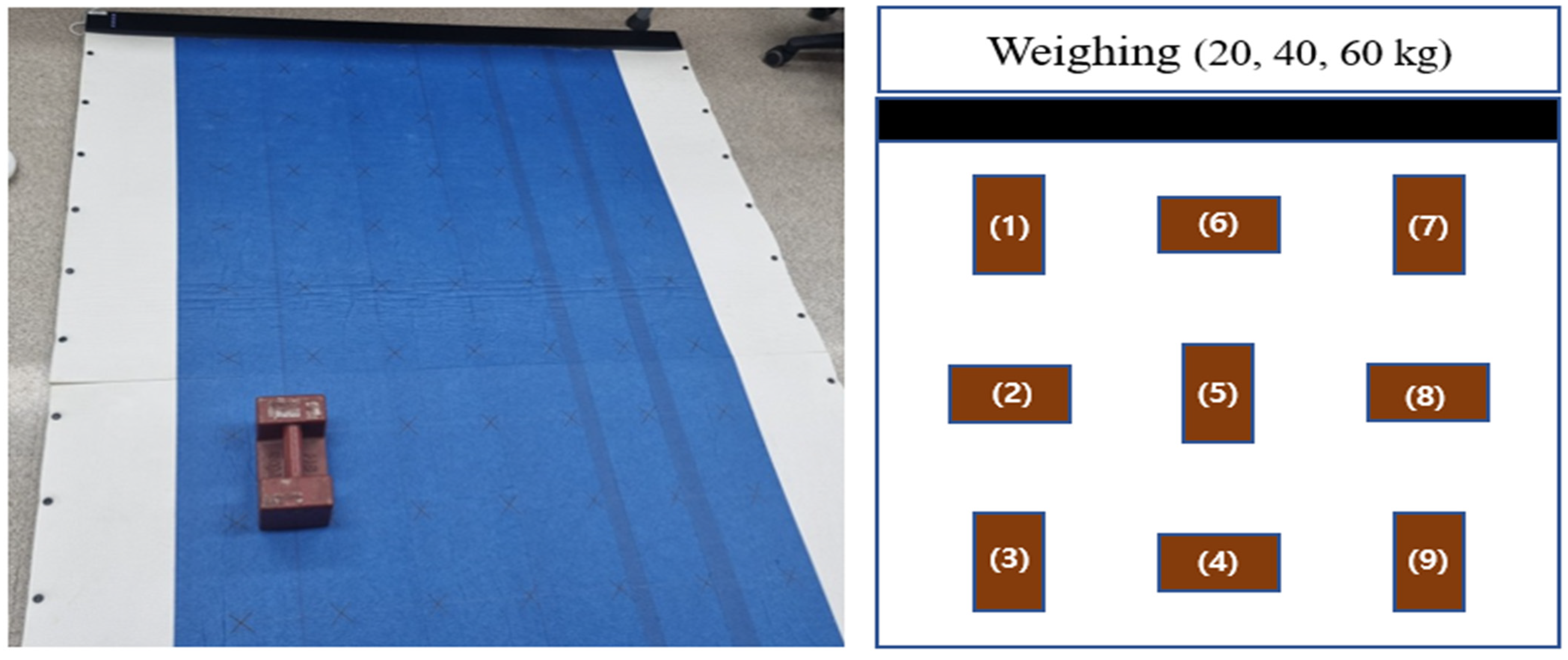
2.4. Validation Using Real Data
3. Results
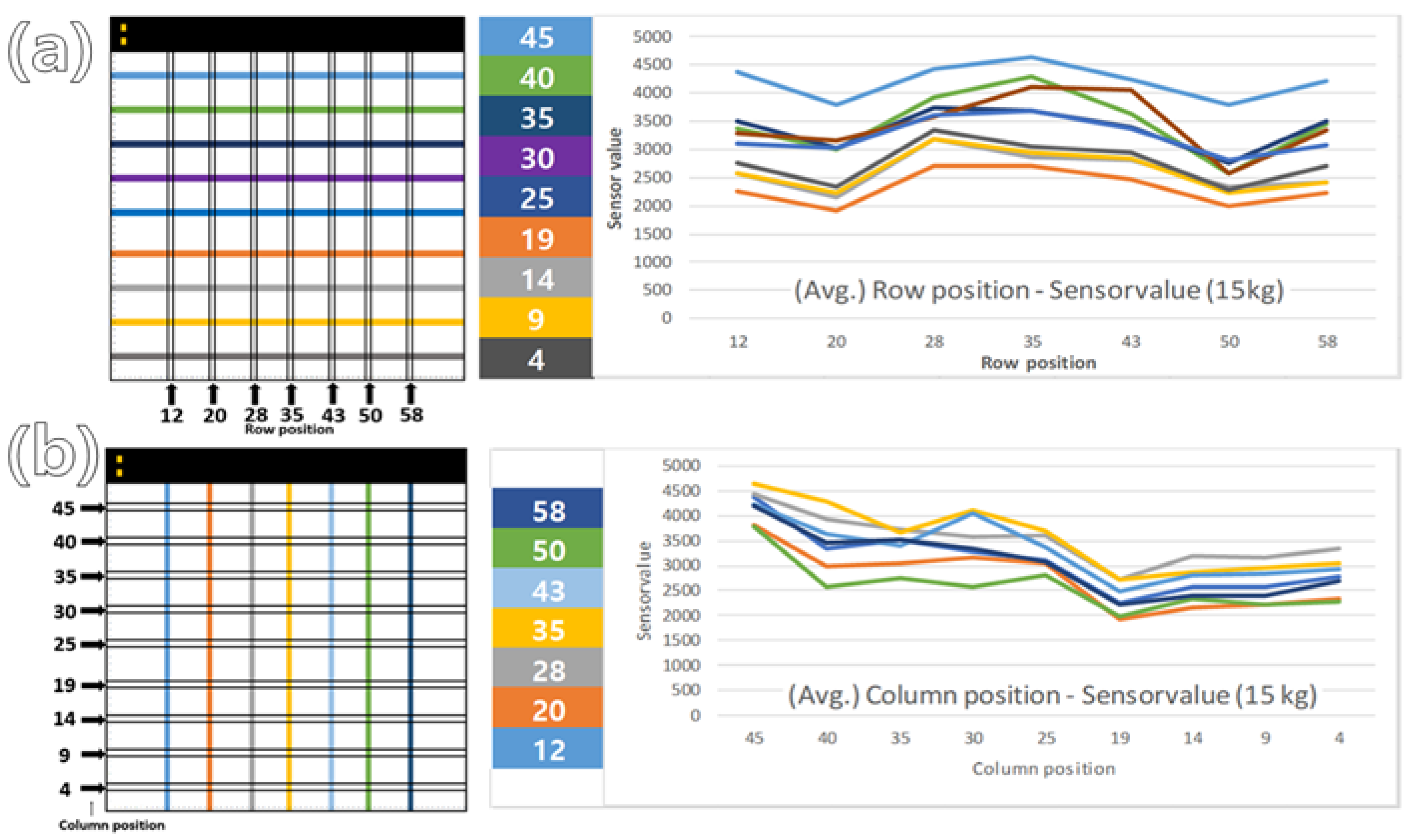
3.1. Force Mat Weight Sensor Value
3.2. Results of Validating the Deep Learning Model on the Test Set
3.3. Results of Validating the Deep Learning Model on Real Data
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, Y.; Liu, C.; Zou, H.; Che, L.; Sun, P.; Yan, J.; Liu, W.; Xu, Z.; Yang, W.; Dong, L.; et al. Integrated wearable smart sensor system for real-time multi-parameter respiration health monitoring. Cell Rep. Phys. Sci. 2023, 4, 101191. [Google Scholar] [CrossRef]
- Lamkin-Kennard, K.A.; Popovic, M.B. 4—Sensors: Natural and Synthetic Sensors. In Biomechatronics; Academic Press: Cambridge, MA, USA, 2019; pp. 81–107. [Google Scholar]
- Beckham, G.; Suchomel, T.; Mizuguchi, S. Force plate use in performance monitoring and sport science testing. New Stud. Athlet. 2014, 29, 25–37. [Google Scholar]
- Cross, R. Standing, walking, running, and jumping on a force plate. Am. J. Phys. 1999, 67, 304–309. [Google Scholar] [CrossRef]
- Instruction Manual: Installation and Maintenance of All Types of Force Plates for Biomechanics; Kistler: Winterthur, Switzerland, 1999.
- Chen, B.; Ma, X.; Dong, R.; Xiao, F.; Chen, P.; Wang, Y. Postural stability assessment method and its validation based on plantar three-partition distributed force measurement. Measurement 2022, 203, 111940. [Google Scholar] [CrossRef]
- Ren, L.; Jones, R.K.; Howard, D. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J. Biomech. 2008, 41, 2750–2759. [Google Scholar] [CrossRef]
- Buchanan, T.S.; Lloyd, D.G.; Manal, K.; Besier, T.F. Estimation of muscle forces and joint moments using a forward-inverse dynamics model. Med. Sci. Sports Exerc. 2005, 37, 1911–1916. [Google Scholar] [CrossRef] [PubMed]
- Arpaia, P.; Cimmino, P.; Matteis, E.D.; D’Addio, G. A low-cost force sensor-based posturographic plate for home care telerehabilitation exergaming. Measurement 2014, 51, 400–410. [Google Scholar] [CrossRef]
- Wicaksono, S.; Ariana, G.P.; Ferryanto, F.; Wibowo, A.; Mahyuddin, A.I. Design optimization, manufacturing, and testing of affordable 3-axis load cell for reliable force plate component. AIP Conf. Proc. 2019, 2187, 050008. [Google Scholar]
- Weizman, Y.; Tan, A.M.; Fuss, F.K. Benchmarking study of the forces and centre of pressure derived from a novel smart-insole against an existing pressure measuring insole and force plate. Measurement 2019, 142, 48–59. [Google Scholar] [CrossRef]
- Faber, G.S.; Chang, C.; Kingma, I.; Schepers, H.M.; Herber, S.; Veltink, P.H.; Dennerlein, J.T. A force plate based method for the calibration of force/torque sensors. J. Biomech. 2012, 45, 1332–1338. [Google Scholar] [CrossRef]
- Bobbert, M.F.; Schamhardt, H.C. Accuracy of determining the point of force application with piezoelectric force plates. J. Biomech. 1990, 23, 705–710. [Google Scholar] [CrossRef] [PubMed]
- Morris, A.S.; Langari, R. Chapter 13—Sensor technologies. In Measurement and Instrumentation, 3rd ed.; Academic Press: Cambridge, MA, USA, 2021; pp. 381–411. [Google Scholar]
- Quijoux, F.; Nicolaï, A.; Chairi, I.; Bargiotas, I.; Ricard, D.; Yelnik, A.; Oudre, L.; Bertin-Hugault, F.; Vidal, P.P.; Vayatis, N.; et al. A review of center of pressure (COP) variables to quantify standing balance in elderly people: Algorithms and open-access code. Physiol. Rep. 2021, 9, e15067. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Jiang, Y.; Hao, H.; Yu, B.; Li, J.; Zhou, S. Pressure calibration- and profile fitting-free spectroscopy technology based on deep neural network for gas sensing. Measurement 2022, 204, 112077. [Google Scholar] [CrossRef]
- Willmott, C.J.; Matsuura, K. Advantages of the mean absolute error (MAE) over the root mean square error (RMSE) in assessing average model performance. Clim. Res. 2005, 30, 79–82. [Google Scholar] [CrossRef]
- Pan, Y.; Nie, X.; Li, Z.; Gu, S. Data-driven vehicle modeling of longitudinal dynamics based on a multibody model and deep neural networks. Measurement 2021, 180, 109541. [Google Scholar] [CrossRef]
- Brimacombe, J.M.; Wilson, D.R.; Hodgson, A.J.; Ho, K.C.T.; Anglin, C. Effect of calibration method on Tekscan sensor accuracy. J. Biomech. Eng. 2009, 131, 034503. [Google Scholar] [CrossRef] [PubMed]
- Beaty, R.E.; Suhling, J.C.; Moody, C.A.; Bittle, D.A.; Johnson, R.W.; Butler, R.D.; Jaeger, R.C. Calibration considerations for piezoresistive-based stress sensors. In Proceedings of the 40th Conference Proceedings on Electronic Components and Technology, Las Vegas, NV, USA, 20–23 May 1990; p. 3897450. [Google Scholar]
- Feng, L.; Gui, L.; Yan, Z.; Yu, L.; Yang, C.; Yang, W. Force Calibration and Prediction of Soft Stretch Sensor Based on Deep Learning. In Proceedings of the 2023 International Conference on Advanced Robotics and Mechatronics (ICARM), Sanya, China, 8–10 July 2023; p. 23642386. [Google Scholar]
- Vidal-Verdú, F.; Barquero, M.J.; Castellanos-Ramos, J.; Navas-González, R.; Sánchez, J.A.; Serón, J.; García-Cerezo, A. A Large Area Tactile Sensor Patch Based on Commercial Force Sensors. Sensors 2011, 11, 5489–5507. [Google Scholar] [CrossRef] [PubMed]
- Kulkarni, A.; Karekar, R.N.; Aiyer, R.C. Optically activated novel force sensor calibrated as weighing balance. Microw. Opt. Technol. Lett. 2005, 45, 300–303. [Google Scholar] [CrossRef]
- Kana, S.; Gurnani, J.; Ramanathan, V.; Turlapati, S.H.; Ariffin, M.Z.; Campolo, D. Fast Kinematic Re-Calibration for Industrial Robot Arms. Sensors 2022, 22, 2295. [Google Scholar] [CrossRef]
- Rick, S.H.; Geoffrey, T.; Milner, D.T.E. A technique for conditioning and calibrating force-sensing resistors for repeatable and reliable measurement of compressive force. J. Biomech. 2008, 41, 3492–3495. [Google Scholar]
- Oh, H.S.; Kang, G.; Kim, U.; Seo, J.K.; You, W.S.; Choi, H.R. Force/torque sensor calibration method by using deep-learning. In Proceedings of the 14th International Conference on Ubiquitous Robots and Ambient Intelligence (IEEE URAI), Jeju, Republic of Korea, 28 June–1 July 2017; p. 17064302. [Google Scholar]
- Ahmed, M.; Ahmad, S.; Raza, M.A.; Kmar, U.; Ansar, M.; Shah, G.A.; Parsons, D.; Hoogenboom, G.; Palosuo, T.; Seidel, S. Models Calibration and Evaluation. In Systems Modeling; Springer: Berlin/Heidelberg, Germany, 2020; pp. 151–178. [Google Scholar]
- Mayer, D.G.; Butler, D.G. Statistical validation. Ecol. Model. 1993, 68, 21–32. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Description |
|---|---|
| Sensor value | Total values of data in activated cells |
| No. Cell | Number of activated cells |
| CoP Row | Row point of the CoP-activated area |
| CoP Column | Column point of the CoP-activated area |
| Row Gap | Row width of activated area |
| Column Gap | Column width of activated area |
| Row Column | 12 | 20 | 28 | 35 | 43 | 50 | 58 |
|---|---|---|---|---|---|---|---|
| 45 | 4361.81 | 3801.10 | 4432.26 | 4626.48 | 4231.57 | 3788.62 | 4208.67 |
| 40 | 3353.14 | 2993.63 | 3920.44 | 4278.25 | 3627.51 | 2576.39 | 3447.71 |
| 35 | 3505.48 | 3031.93 | 3726.73 | 3672.93 | 3399.90 | 2749.87 | 3505.99 |
| 30 | 3281.29 | 3164.10 | 3564.50 | 4103.60 | 4061.09 | 2572.16 | 3335.32 |
| 25 | 3113.13 | 3034.10 | 3612.79 | 3688.41 | 3364.83 | 2817.65 | 3064.23 |
| 19 | 2263.09 | 1910.09 | 2707.31 | 2714.86 | 2477.88 | 1980.80 | 2218.33 |
| 14 | 2570.04 | 2159.12 | 3191.69 | 2860.07 | 2800.15 | 2345.33 | 2409.73 |
| 9 | 2562.44 | 2233.04 | 3170.10 | 2948.55 | 2828.51 | 2223.13 | 2409.29 |
| 4 | 2766.91 | 2334.68 | 3327.82 | 3042.83 | 2931.93 | 2289.39 | 2692.63 |
| Average | 3086.37 | 2740.20 | 3517.07 | 3548.44 | 3302.60 | 2593.70 | 3032.43 |
| SD (±) | 635.73 | 611.28 | 496.67 | 691.22 | 597.08 | 520.87 | 654.53 |
| Weighing Point | 20 kg | Error (%) | 40 kg | Error (%) | 60 kg | Error (%) |
|---|---|---|---|---|---|---|
| 1 | 19.57 | 2.15 | 40.53 | −1.33 | 57.46 | 4.23 |
| 2 | 19.80 | 1.00 | 43.74 | −9.35 | 54.19 | 9.68 |
| 3 | 20.49 | −2.45 | 42.69 | −6.72 | 60.08 | −0.13 |
| 4 | 19.18 | 4.10 | 40.89 | −2.22 | 60.51 | −0.85 |
| 5 | 20.26 | −1.30 | 39.96 | 0.10 | 58.38 | 2.70 |
| 6 | 20.44 | −2.20 | 42.34 | −5.85 | 60.84 | −1.40 |
| 7 | 19.91 | 0.45 | 39.41 | 1.48 | 55.33 | 7.78 |
| 8 | 20.33 | −1.65 | 38.96 | 2.60 | 54.96 | 8.40 |
| 9 | 19.92 | 0.40 | 39.19 | 2.03 | 60.19 | −0.32 |
| Average | 19.99 | 0.06 | 40.86 | −2.14 | 57.99 | 3.34 |
| SD (±) | 0.44 | 2.18 | 1.70 | 4.26 | 2.62 | 4.36 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seo, J.-W.; Kim, H.; Kim, J.U.; Do, J.-H.; Ko, J. Ground Force Precision Calibration Method for Customized Piezoresistance Sensing Flexible Force Measurement Mat. Sensors 2024, 24, 2363. https://doi.org/10.3390/s24072363
Seo J-W, Kim H, Kim JU, Do J-H, Ko J. Ground Force Precision Calibration Method for Customized Piezoresistance Sensing Flexible Force Measurement Mat. Sensors. 2024; 24(7):2363. https://doi.org/10.3390/s24072363
Chicago/Turabian StyleSeo, Jeong-Woo, Hyeonjong Kim, Jaeuk U. Kim, Jun-Hyeong Do, and Junghyuk Ko. 2024. "Ground Force Precision Calibration Method for Customized Piezoresistance Sensing Flexible Force Measurement Mat" Sensors 24, no. 7: 2363. https://doi.org/10.3390/s24072363