

Wi-CHAR: A WiFi Sensing Approach with Focus on Both Scenes and Restricted Data

Abstract
1. Introduction
2. Related Work
2.1. Non-Few-Shot Learning with WiFi HAR
2.2. Few-Shot Learning with WiFi HAR
3. System Design
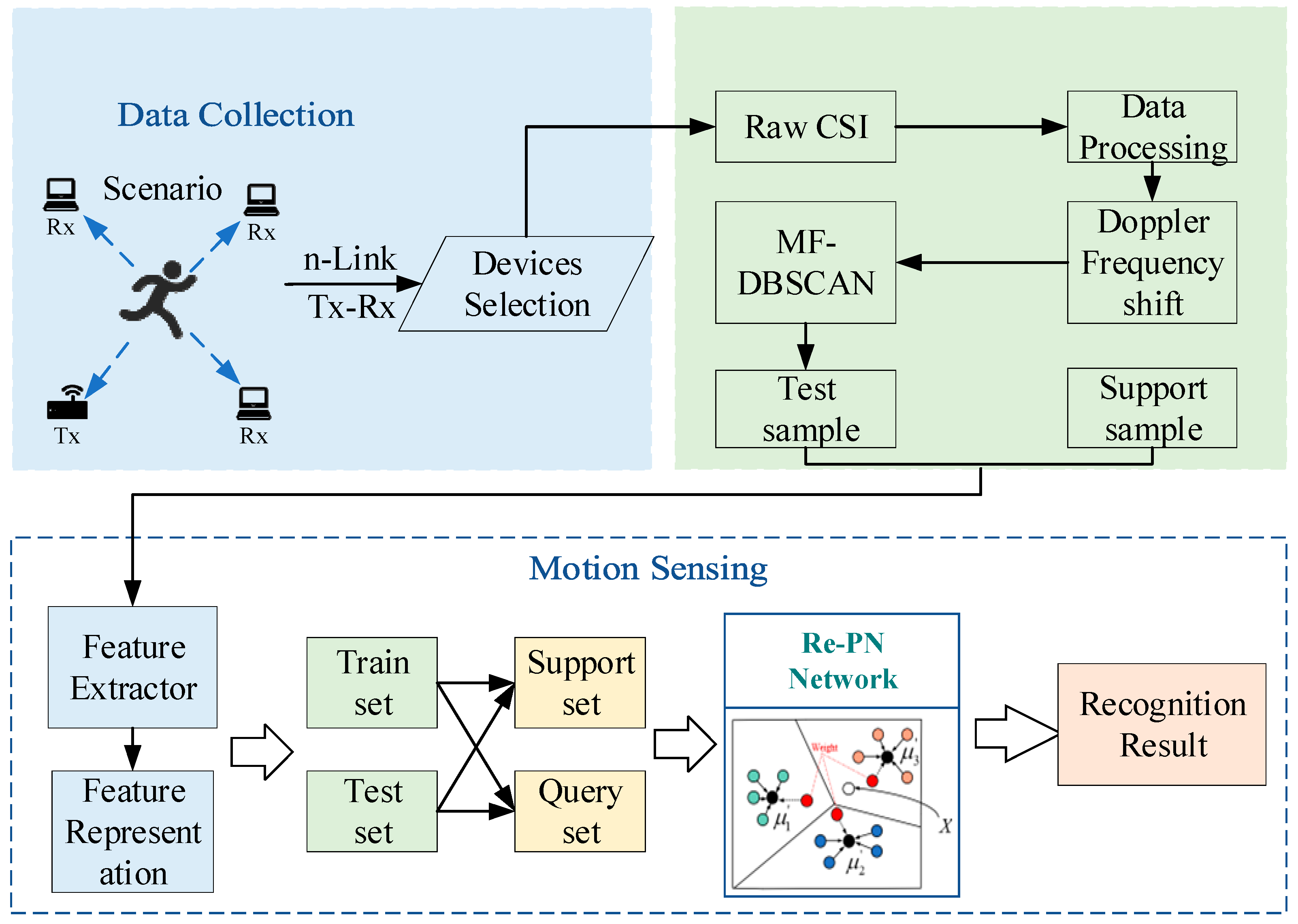
3.1. Overall System Architecture
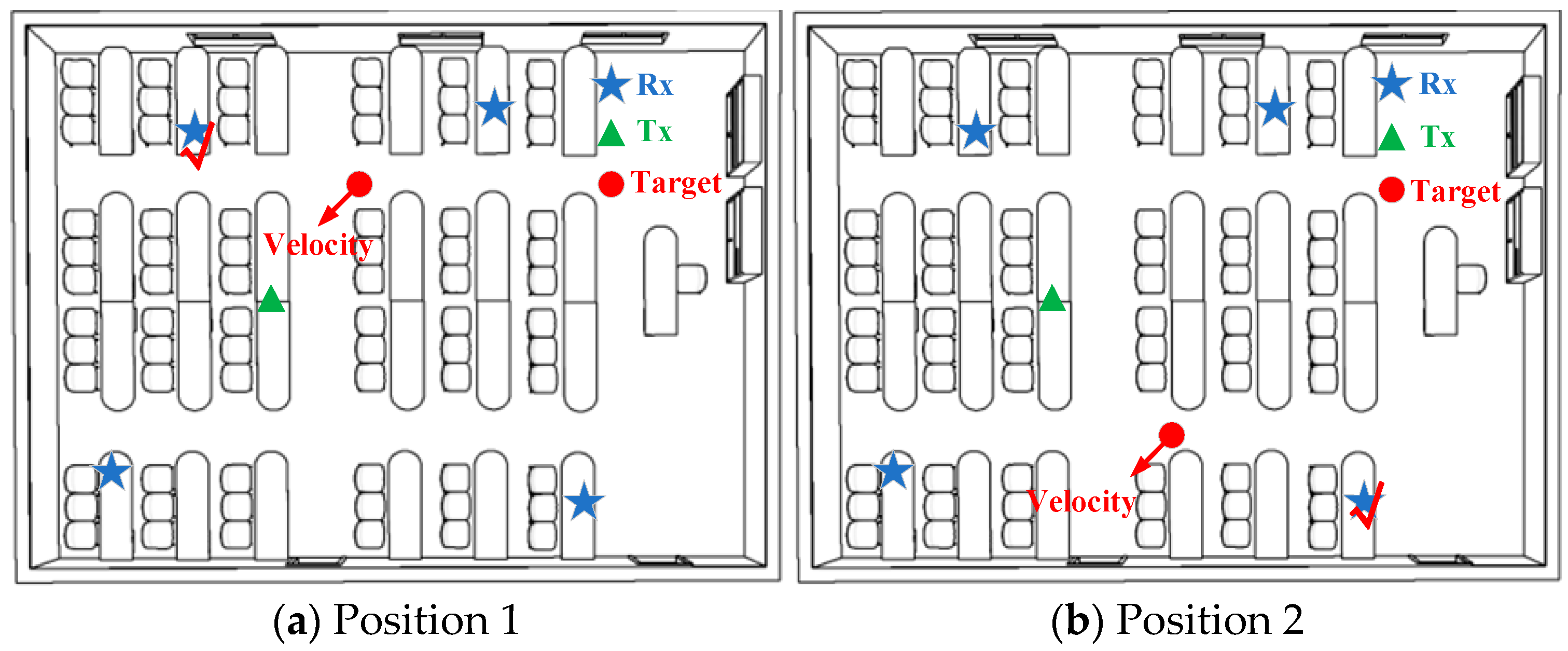
3.2. Dynamic Selection of Rx in n-Links
3.3. Data Processing and Feature Extraction
| Algorithm 1 Dynamic Device (Rx) Selection Algorithm |
| Input: Tx and Rxs position , Rx number , Parameters , Position of the target at :, The static path signal power of Rx at moment : . Output: Res (selection result) of the Rxs selected at time . //First exclude Rx outside the induction zone. 1: Angle of the target at position and with Tx; 2: for in do 3: Angle of the target at position and with Rx; ; //Preliminary SSNR. 5: end for 6: for in do 7: Get position relationship ;//Candidates. 8: Computation and ; 9: An equivalent Rx←(); 10: end for 11: Select an optimal Rxs with direction: . |
| Algorithm 2 MF-DBSCAN Algorithm |
| Input: Raw DFS data. Output: Pre-processed DFS (MF-DBSCAN results) 1: Kernel density estimation, ; mathematical expectation, ; raw data ; 2: do 3: Splitting by minimum interval , ; 4: Calculate number of clusters according to , ; 5: if Calculation contour coefficient ; 6: Compare , select maximum ; 7: Get and corresponding ; 8: Get the globally optimal , : 9: else marked as noise; 10: until no tagged objects. |
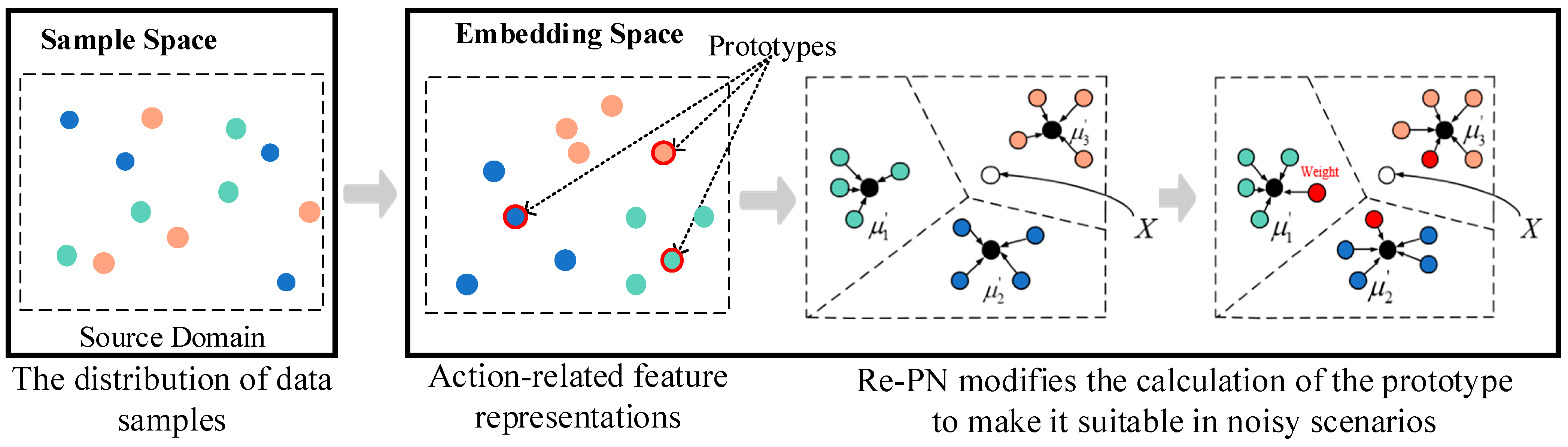
3.4. Re-PN Module
| Algorithm 3 Re-weighting prototypical network model (Re-PN model) |
| Input: Training set , Number of categories contained in the support set, is the number of classes in the training set. Output: Re-PN Loss of Classifier Model. 1: ; //Few-shot task set. 2: for in do 3: ; //Select support set. 4: for in do 5: Calculate Equation (10) ; // Get weight parameters. 6: end for 7: Calculate feature prototype; 8: end for 9: Loss ; 10: for in do 11: ; //Select query set. 12: for in do //Calculate losses and update model parameters. 13: Calculate losses ; 14: update . 15: end for 16: end for |
4. Experiments and Performance Analysis
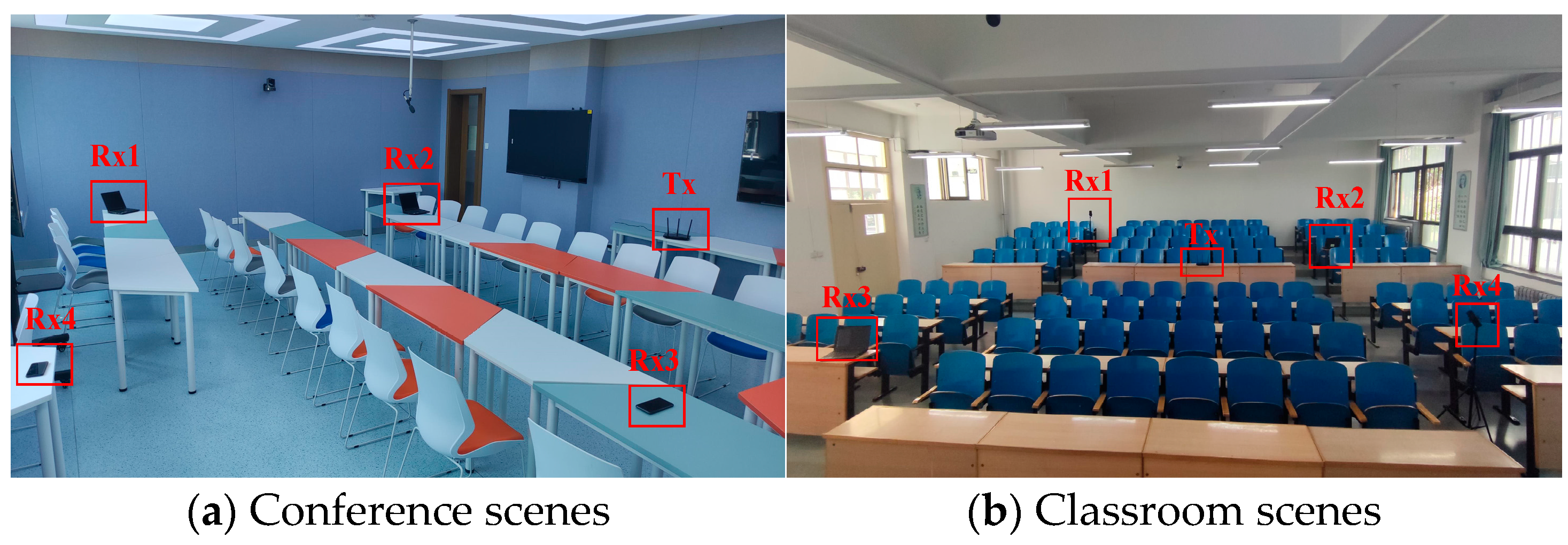
4.1. Experimental Setup
4.2. Performance Overview
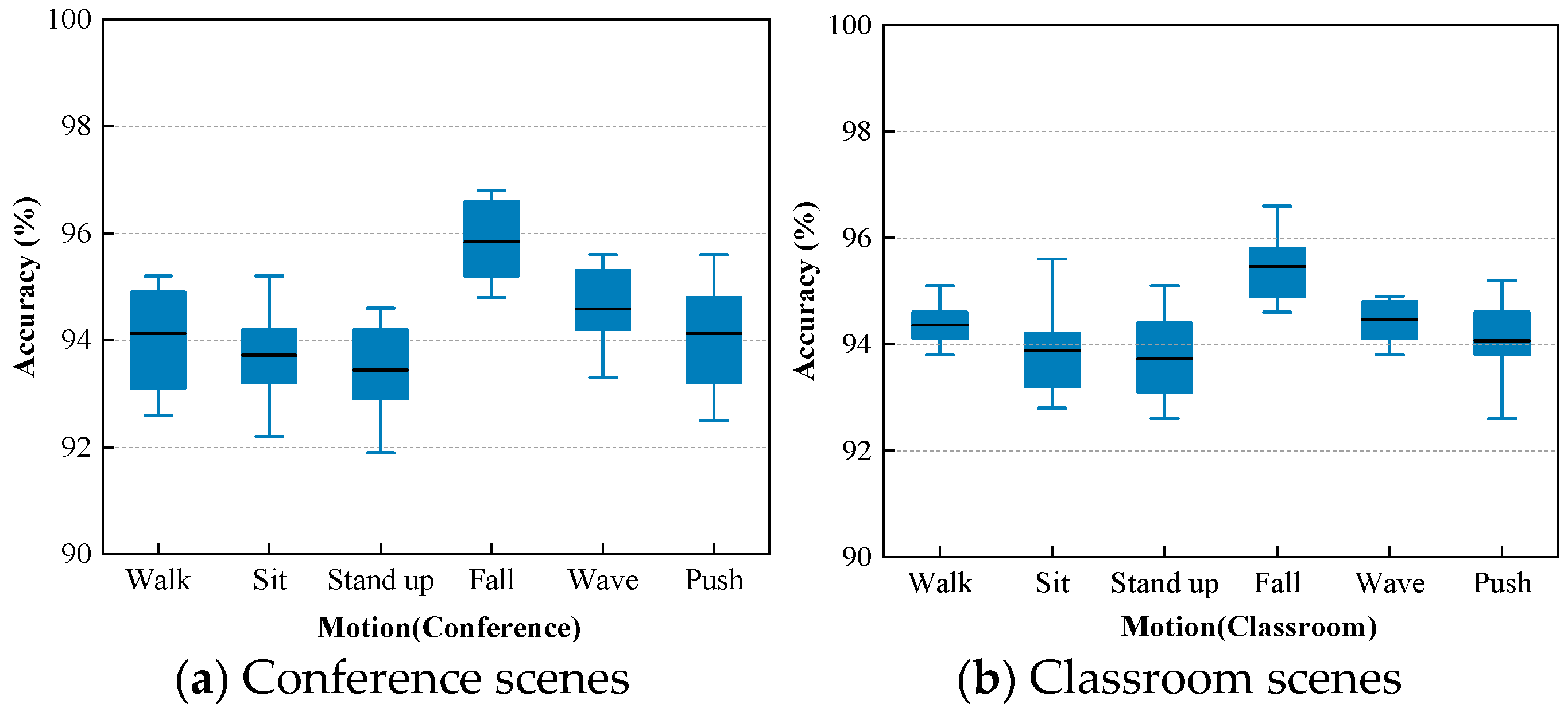
4.2.1. Evaluation within the Intra-Domain
4.2.2. Cross-Scene Recognition Effect
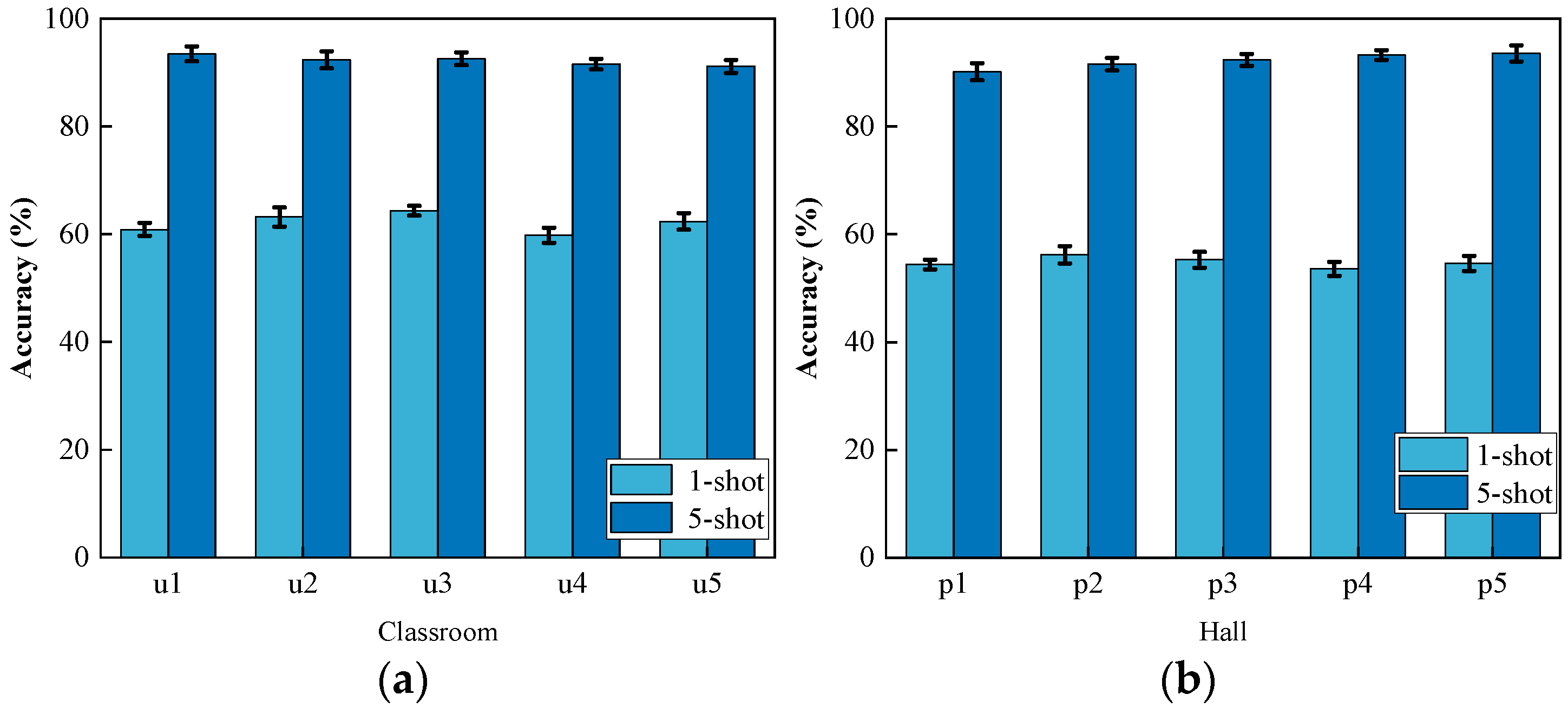
4.2.3. Cross-User Recognition Effect
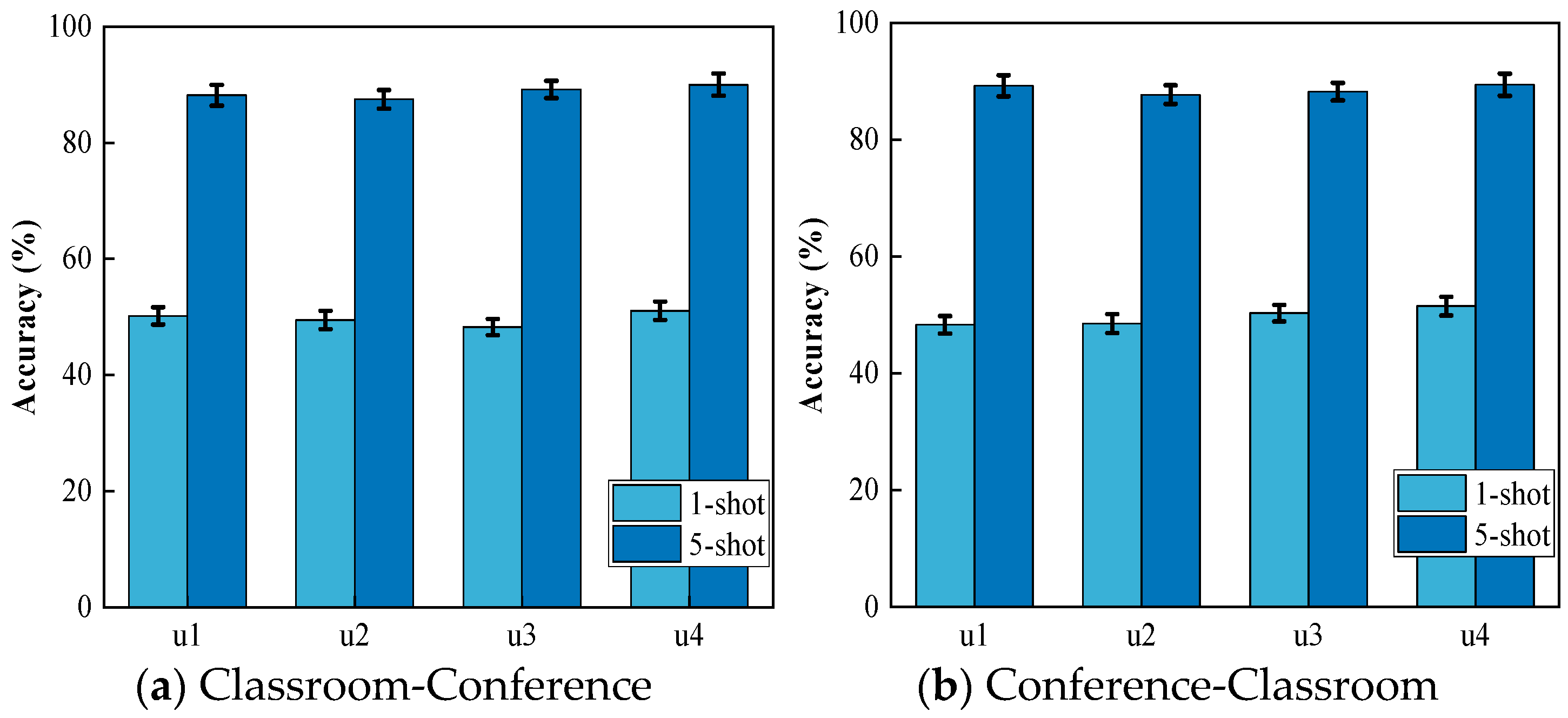
4.2.4. Cross-User and Cross-Scene Recognition Effect
4.3. Discussion and Analysis
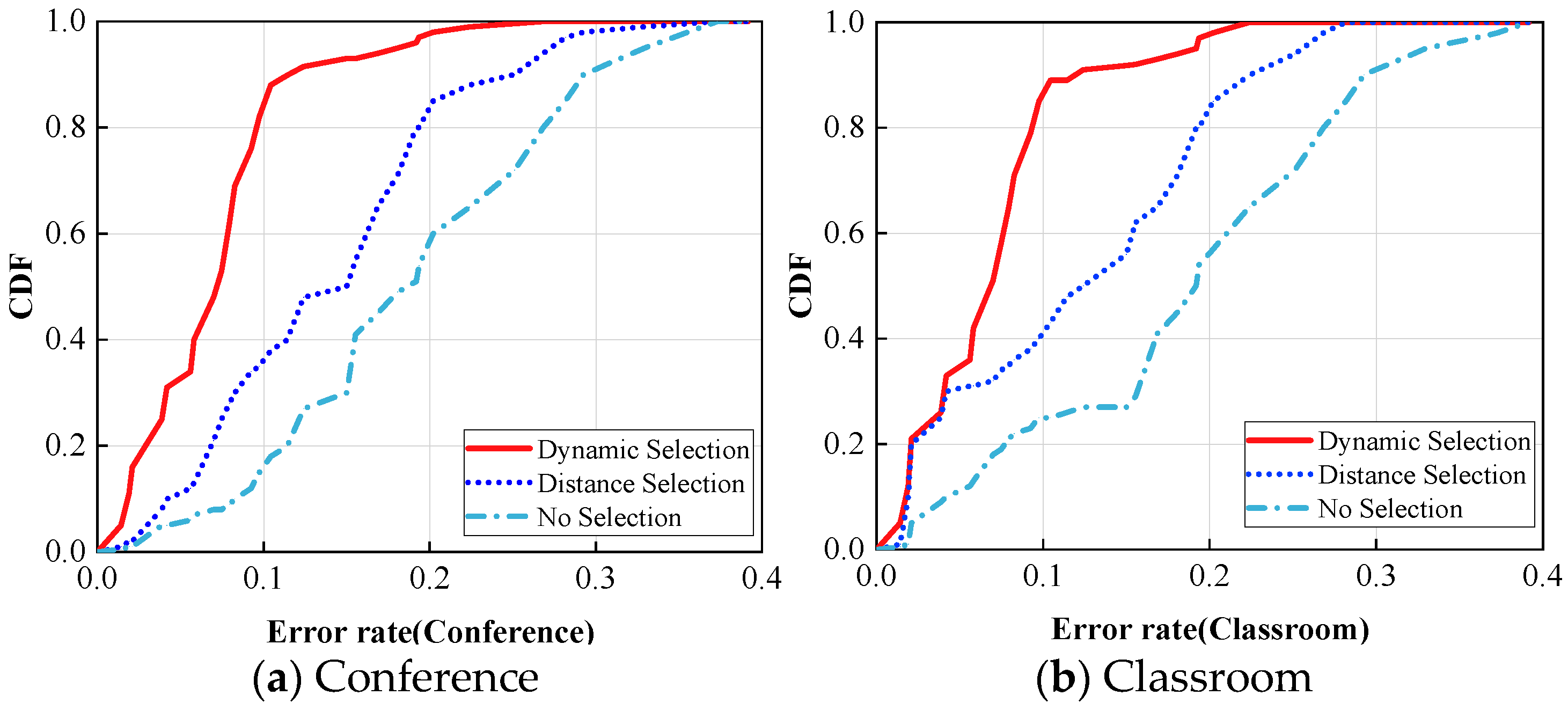
4.3.1. Effect of the Number of Rx and Dynamic Selection
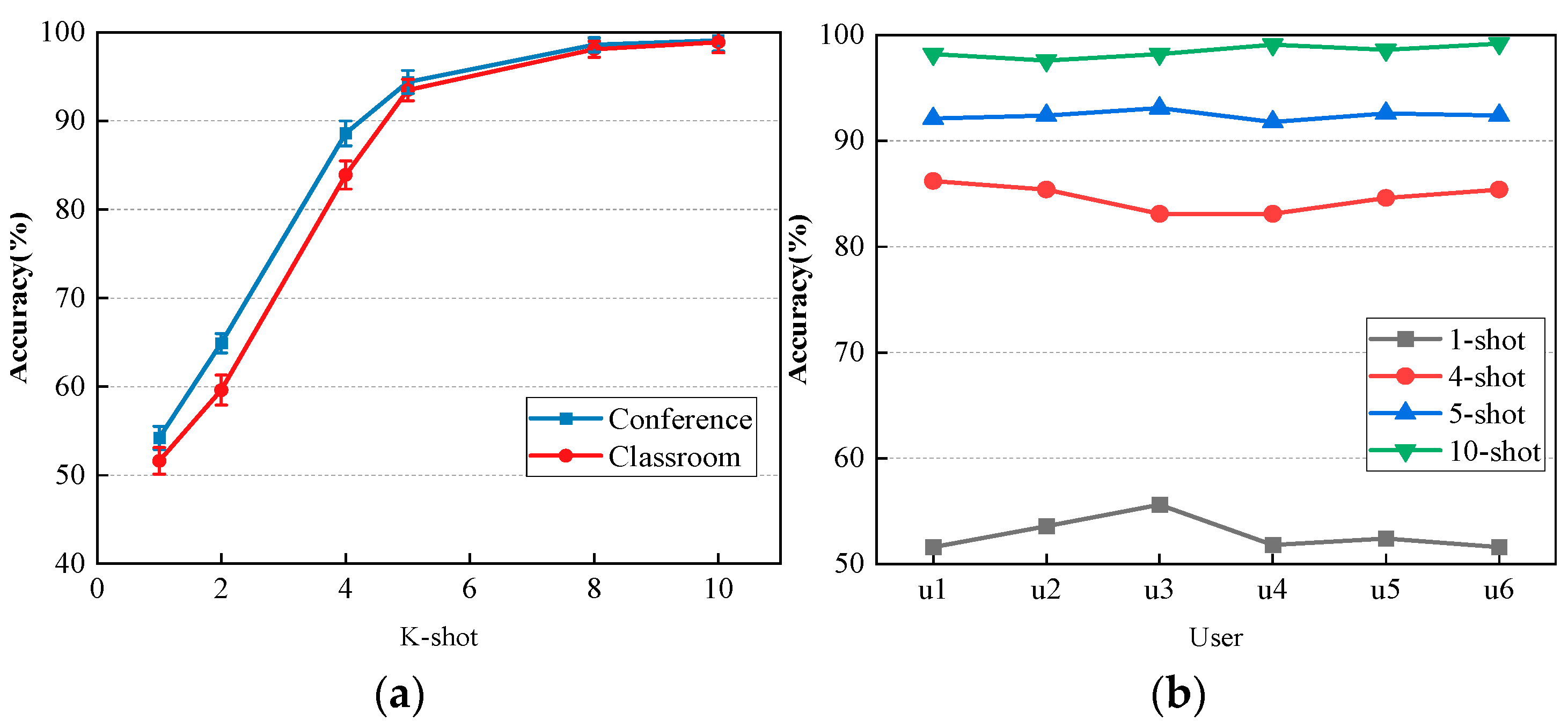
4.3.2. Effect of Different Sample Sizes
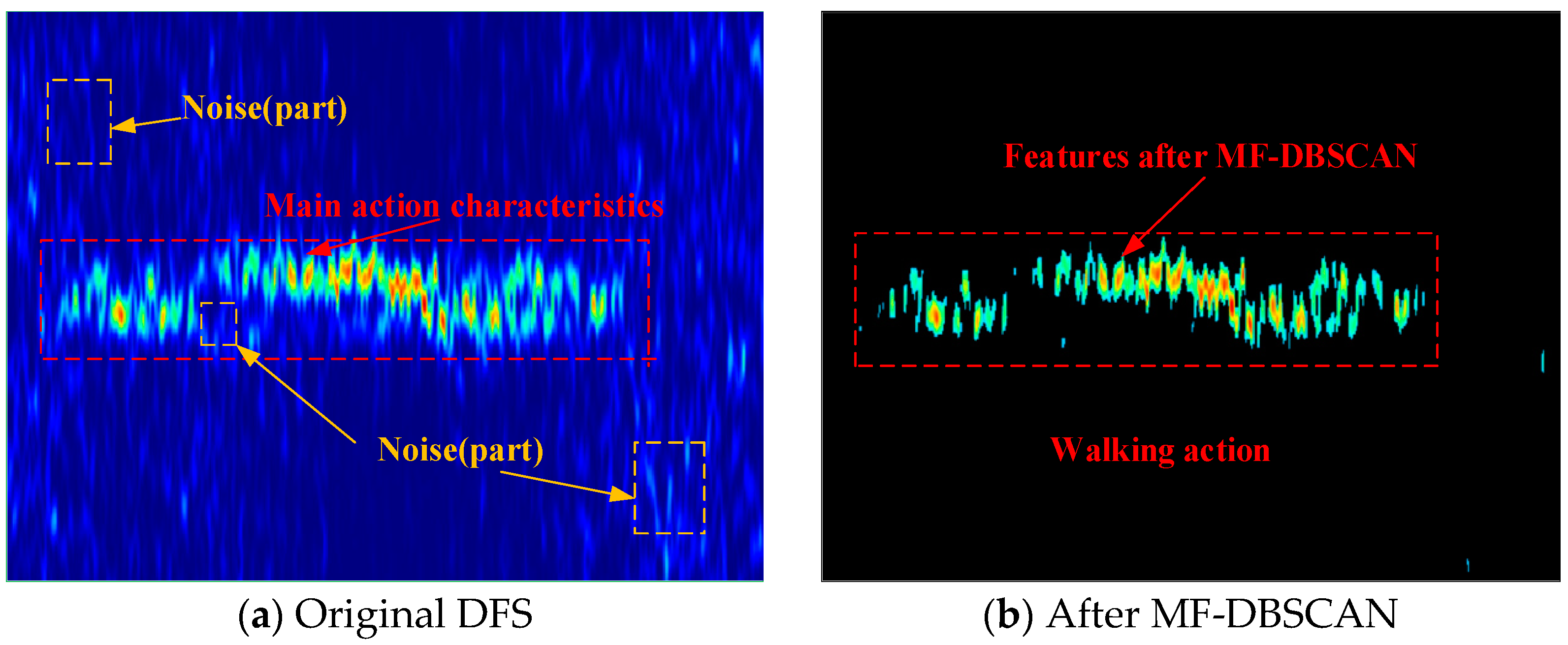
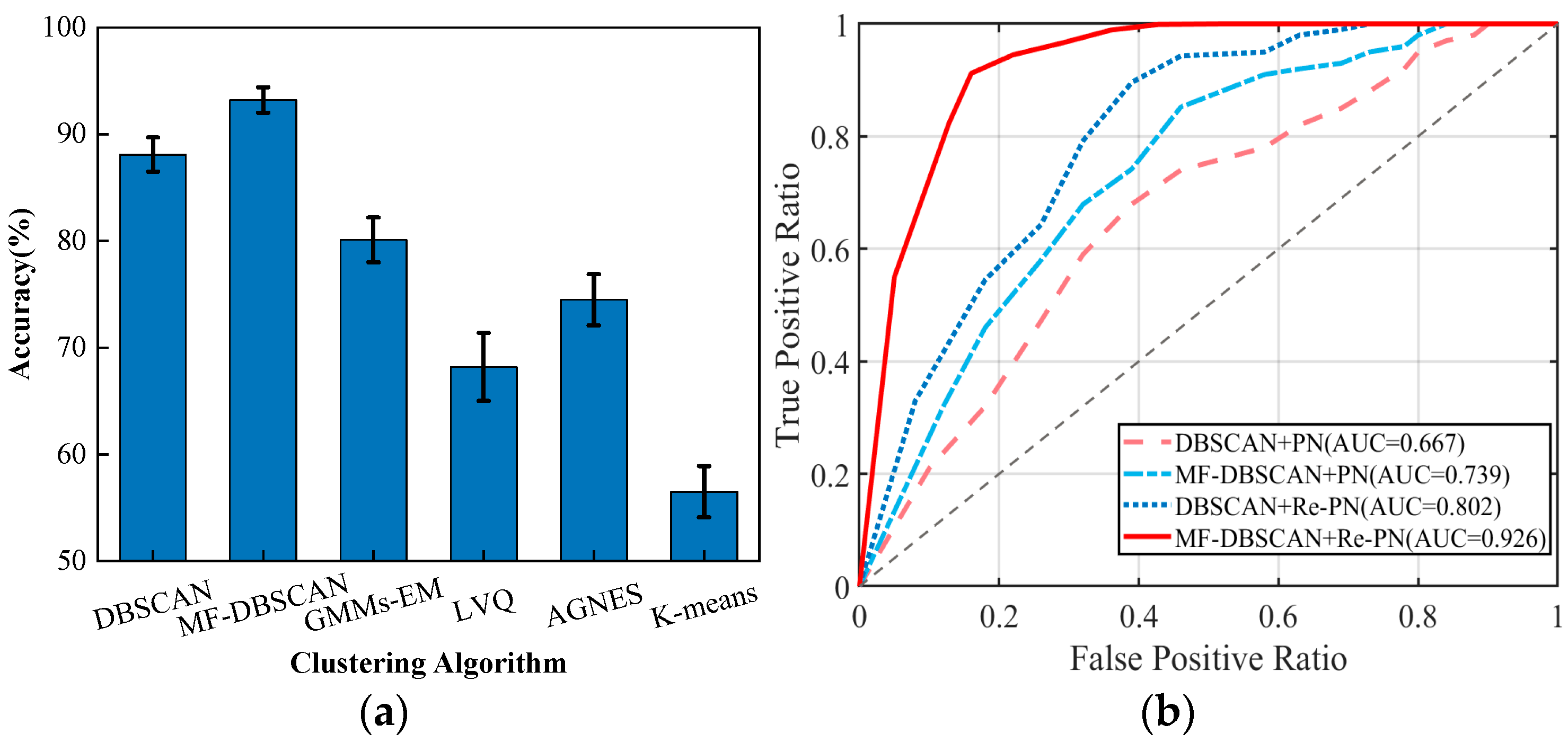
4.3.3. Effect of MF-DBSCAN Algorithm
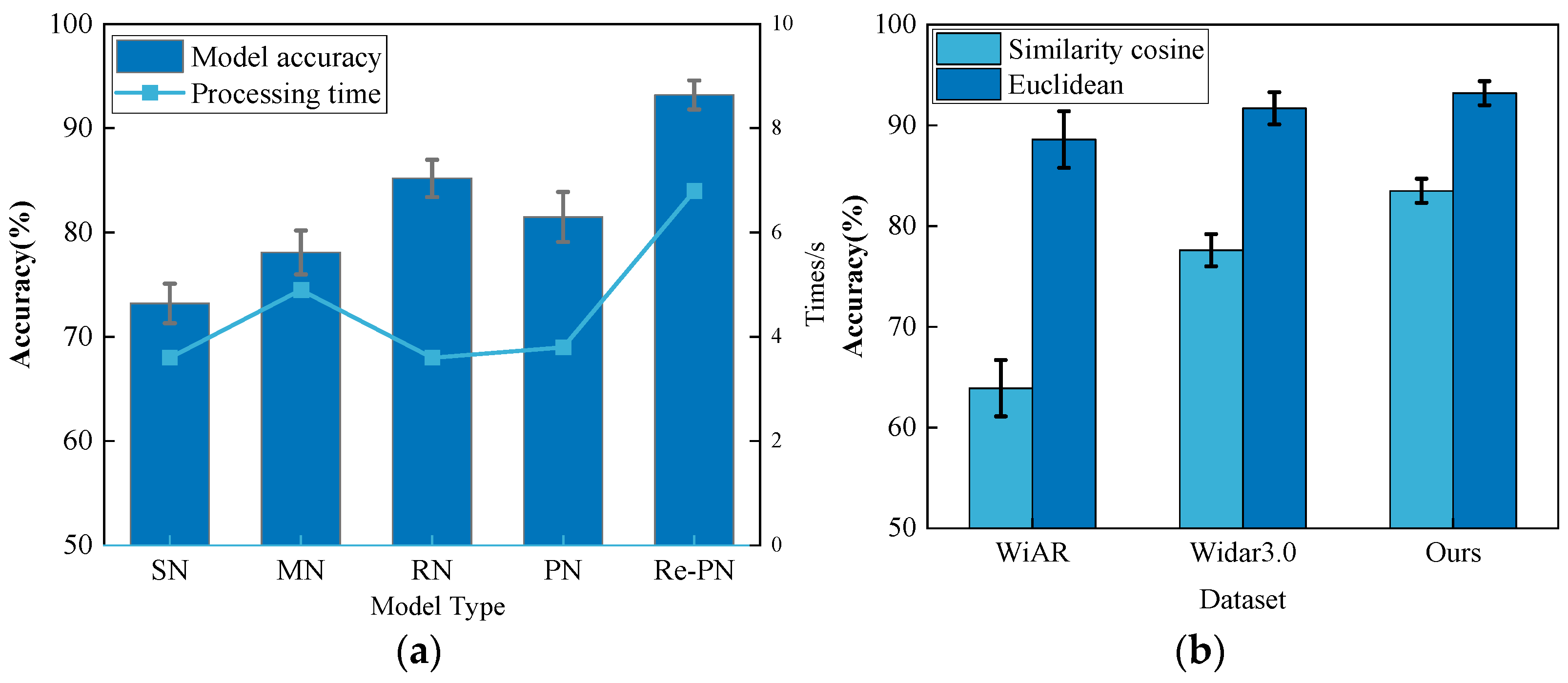
4.3.4. Comparison of Different Metrics Models
4.3.5. Algorithm Complexity Analysis
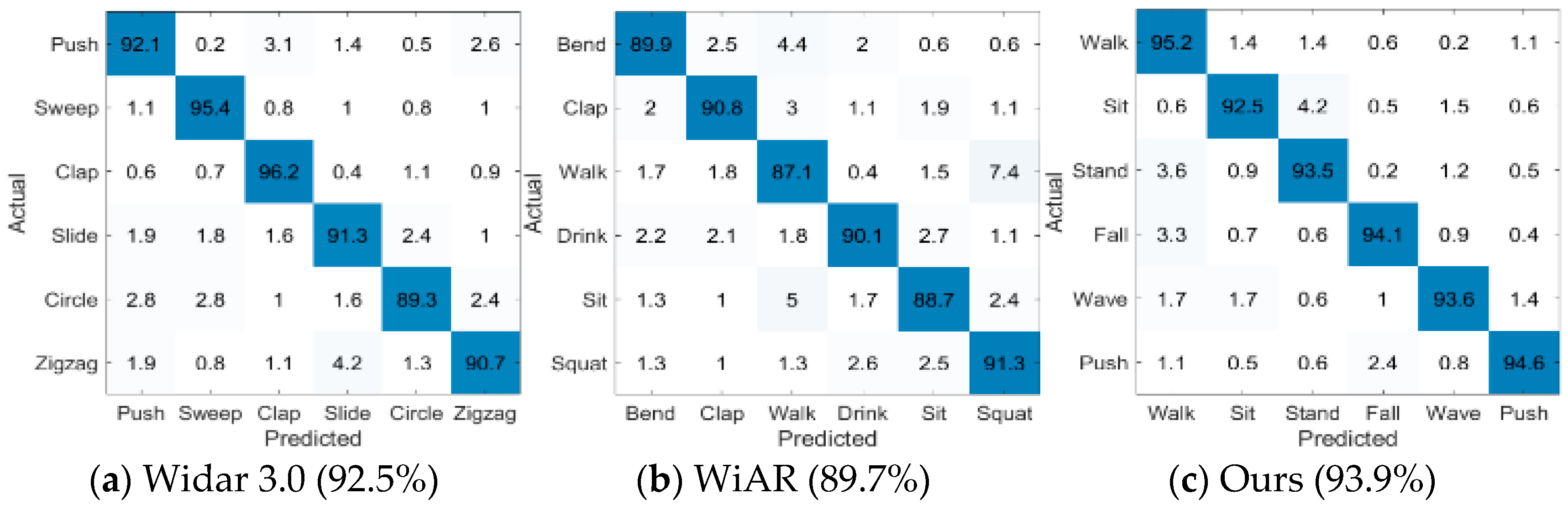
4.3.6. Comparison with Existing Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, R.; Liu, Q.; Zhu, H.; Cao, H. Multistage Deep Transfer Learning for EmIoT-Enabled Human–Computer Interaction. IEEE Internet Things J. 2022, 16, 15128–15137. [Google Scholar] [CrossRef]
- Dubey, A.; Sood, P.; Santos, J.; Ma, D.; Chiu, C.-Y.; Murch, R. An Enhanced Approach to Imaging the Indoor Environment Using WiFi RSSI Measurements. IEEE Trans. Veh. Technol. 2021, 70, 8415–8430. [Google Scholar] [CrossRef]
- Sun, Z.; Ke, Q.; Rahmani, H.; Bennamoun, M.; Wang, G.; Liu, J. Human Action Recognition from Various Data Modalities: A Review. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 3200–3225. [Google Scholar] [CrossRef]
- Huang, W.; Zhang, L.; Wu, H.; Min, F.; Song, A. Channel-Equalization-HAR: A Light-weight Convolutional Neural Network for Wearable Sensor Based Human Activity Recognition. IEEE Trans. Mob. Comput. 2023, 22, 5064–5077. [Google Scholar] [CrossRef]
- Chen, Z.; Zheng, T.; Cai, C.; Luo, J. MoVi-Fi: Motion-robust vital signs waveform recovery via deep interpreted RF sensing. In Proceedings of the 27th Annual International Conference on Mobile Computing and Networking, New Orleans, LA, USA, 25–29 October 2021. [Google Scholar]
- Ding, S.; Chen, Z.; Zheng, T.; Luo, J. RF-net: A unified meta-learning framework for RF-enabled one-shot human activity recognition. In Proceedings of the 18th Conference on Embedded Networked Sensor Systems, Virtual Event, Japan, 16–19 November 2020. [Google Scholar]
- Wang, L.; Zhang, X.; Jiang, Y.; Zhang, Y.; Xu, C.; Gao, R.; Zhang, D. Watching Your Phone’s Back: Gesture Recognition by Sensing Acoustical Structure-borne Propagation. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2021, 5, 1–26. [Google Scholar] [CrossRef]
- Shen, Y.-H.; Chien, Y.-R.; Fang, S.-H. Poster Abstract: Human Detection with Weak Ranging Signal for FMCW Radar Systems. In Proceedings of the 2020 19th ACM/IEEE International Conference on Information Processing in Sensor Networks, Sydney, Australia, 21–24 April 2020. [Google Scholar]
- Yu, C.; Xu, Z.; Yan, K.; Chien, Y.-R.; Fang, S.-H.; Wu, H.-C. Noninvasive Human Activity Recognition Using Millimeter-Wave Radar. IEEE Syst. J. 2022, 16, 3036–3047. [Google Scholar] [CrossRef]
- Pizarro, A.B.; Beltrán, J.P.; Cominelli, M.; Gringoli, F.; Widmer, J. Accurate ubiquitous localization with off-the-shelf IEEE 802.11ac devices. In Proceedings of the 19th Annual International Conference on Mobile Systems, Applications, and Services, Virtual Event, 24 June–2 July 2021. [Google Scholar]
- Zhou, M.; Long, Y.; Zhang, W.; Pu, Q.; Wang, Y.; Nie, W.; He, W. Adaptive Genetic Algorithm-Aided Neural Network with Channel State Information Tensor Decomposition for Indoor Localization. IEEE Trans. Evol. Comput. 2021, 25, 913–927. [Google Scholar] [CrossRef]
- Liu, J.; Zeng, Y.; Gu, T.; Wang, L.; Zhang, D. WiPhone: Smartphone-based Respiration Monitoring Using Ambient Reflected WiFi Signals. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2021, 5, 1–19. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L.; Wang, C.; Ma, X.; Gao, Q.; Lin, B. Device-Free Human Gesture Recognition with Generative Adversarial Networks. IEEE Internet Things J. 2020, 7, 7678–7688. [Google Scholar] [CrossRef]
- Li, C.; Cao, Z.; Liu, Y. Deep AI Enabled Ubiquitous Wireless Sensing: A Survey. ACM Comput. Surv. 2022, 54, 1–35. [Google Scholar] [CrossRef]
- Zhang, Y.; Zheng, Y.; Qian, K.; Zhang, G.; Liu, Y.; Wu, C.; Yang, Z. Widar3.0: Zero-Effort Cross-Domain Gesture Recognition with Wi-Fi. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 44, 8671–8688. [Google Scholar] [CrossRef]
- Guo, L.; Wang, L.; Lin, C.; Liu, J.; Lu, B.; Fang, J.; Liu, Z.; Shan, Z.; Yang, J.; Guo, S. WiAR: A Public Dataset for WiFi-Based Activity Recognition. IEEE Access 2019, 7, 154935–154945. [Google Scholar] [CrossRef]
- Zhang, J.; Tang, Z.; Li, M.; Fang, D.; Nurmi, P.; Wang, Z. CrossSense: Towards Cross-Site and Large-Scale WiFi Sensing. In Proceedings of the 24th Annual International Conference on Mobile Computing and Networking, New Delhi, India, 29 October–2 November 2018. [Google Scholar]
- Zhang, L.; Wang, C.; Ma, M.; Zhang, D. WiDIGR: Direction-Independent Gait Recognition System Using Commercial Wi-Fi Devices. IEEE Internet Things J. 2020, 7, 1178–1191. [Google Scholar] [CrossRef]
- Lu, X.; Li, Y.; Cui, W.; Wang, H. CeHAR: CSI-Based Channel-Exchanging Human Activity Recognition. IEEE Internet Things J. 2023, 10, 5953–5961. [Google Scholar] [CrossRef]
- Sheng, B.; Xiao, F.; Sha, L.; Sun, L. Deep Spatial–Temporal Model Based Cross-Scene Action Recognition Using Commodity WiFi. IEEE Internet Things J. 2020, 7, 3592–3601. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, F.; Wei, B.; Zhang, Q.; Huang, H.; Shah, S.W.; Cheng, J. Data Augmentation and Dense-LSTM for Human Activity Recognition Using WiFi Signal. IEEE Internet Things J. 2021, 8, 4628–4641. [Google Scholar] [CrossRef]
- Lin, C.; Ji, C.; Ma, F.; Wang, L.; Zhong, W.; Wu, G. WiLCA: Accelerating Contactless Authentication with Limited Data. In Proceedings of the 2022 19th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Virtual, 20–23 September 2022. [Google Scholar]
- Sun, H.; Chia, L.G.; Razul, S.G. Through-Wall Human Sensing with WiFi Passive Radar. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2135–2148. [Google Scholar] [CrossRef]
- Ding, X.; Jiang, T.; Zhong, Y.; Yang, J.; Huang, Y.; Li, Z. Device-free Location-independent Human Activity Recognition via Few-shot Learning. In Proceedings of the 2021 IEEE/CIC International Conference on Communications in China (ICCC Workshops), Xiamen, China, 28–30 July 2021. [Google Scholar]
- Ma, X.; Zhao, Y.; Zhang, L.; Gao, Q.; Pan, M.; Wang, J. Practical Device-Free Gesture Recognition Using WiFi Signals Based on Meta learning. IEEE Trans. Ind. Inform. 2020, 16, 228–237. [Google Scholar] [CrossRef]
- Wang, Y.; Yao, L.; Wang, Y.; Zhang, Y. Robust CSI-Based Human Activity Recognition with Augment Few Shot Learning. IEEE Sens. J. 2021, 21, 24297–24308. [Google Scholar] [CrossRef]
- Wang, D.; Yang, J.; Cui, W.; Xie, L.; Sun, S. AirFi: Empowering WiFi-based Passive Human Gesture Recognition to Unseen Environment via Domain Generalization. IEEE Trans. Mob. Comput. 2024, 23, 1156–1168. [Google Scholar] [CrossRef]
- Shi, Z.; Zhang, J.A.; Xu, R.Y.; Cheng, Q. Environment-Robust Device-Free Human Activity Recognition with Channel-State-Information Enhancement and One-Shot Learning. IEEE Trans. Mob. Comput. 2022, 21, 540–554. [Google Scholar] [CrossRef]
- Gong, T.; Kim, Y.; Shin, J.; Lee, S. MetaSense: Few-shot adaptation to untrained conditions in deep mobile sensing. In Proceedings of the 17th Conference on Embedded Networked Sensor Systems, New York, NY, USA, 10–13 November 2019; pp. 110–123. [Google Scholar]
- Xiao, R.; Liu, J.; Han, J.; Ren, K. Onefi: One-shot recognition for unseen gesture via cots wifi. In Proceedings of the 19th ACM Conference on Embedded Networked Sensor Systems, Coimbra, Portugal, 15–17 November 2021; pp. 206–219. [Google Scholar]
- Wang, X.; Niu, K.; Xiong, J.; Qian, B.; Yao, Z.; Lou, T.; Zhang, D. Placement Matters: Understanding the Effects of Device Placement for WiFi Sensing. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2022, 6, 1–25. [Google Scholar] [CrossRef]
- Yang, Z.; Zhou, Z.; Liu, Y. From RSSI to CSI: Indoor localization via channel response. ACM Comput. Surv. 2013, 46, 1–32. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Gringoli, F.; Schulz, M.; Link, J.; Hollick, M. Free your CSI: A channel state information extraction platform for modern Wi-Fi chipsets. In Proceedings of the 13th International Workshop on Wireless Network Testbeds, Experimental Evaluation & Characterization, Los Cabos, Mexico, 25 October 2019. [Google Scholar]
- Halperin, D.; Hu, W.; Sheth, A.; Wetherall, D. Tool release: Gathering 802.11n traces with channel state information. ACM SIGCOMM Comput. Commun. Rev. 2011, 41, 53. [Google Scholar] [CrossRef]
- Zhou, R.; Gong, Z.; Tang, K.; Zhou, B.; Cheng, Y. Device-free cross location activity recognition via semi-supervised deep learning. Neural Comput. Appl. 2022, 34, 10189–10203. [Google Scholar] [CrossRef]
- Gong, Z.; Zhou, R.; Cheng, Y.; Luo, Y. Cross-Domain CSI-Based Activity Recognition via Iterative Soft Labeling and Domain Alignment. IEEE Syst. J. 2023, 17, 1599–1609. [Google Scholar] [CrossRef]
- Li, X.; Chang, L.; Song, F.; Wang, J.; Chen, X.; Tang, Z.; Wang, Z. CrossGR: Accurate and Low-cost Cross-target Gesture Recognition Using Wi-Fi. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2021, 5, 1–23. [Google Scholar] [CrossRef]
- Gao, Z.; Xue, J.; Zhang, J.; Xiao, W. ML-WiGR: A meta-learning-based approach for cross-domain device-free gesture recognition. Soft Comput. 2022, 26, 6145–6155. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Details |
|---|---|
| Categories | Sit, Stand, Push, Fall, Walk, Wave |
| Scenarios | Conference (6 m × 10 m), Classroom (10 m × 12 m) |
| Users | Six adults (three males, three females, height: 1.55–1.90 m, weight: 42–110 kg) |
| Train Set | Test Set | Action Recognition Rate (%) | |
|---|---|---|---|
| 1-Shot | 5-Shot | ||
| M1 | M2 | 60.2 ± 1.2 | 92.3 ± 1.5 |
| M3 | 63.4 ± 0.9 | 93.5 ± 1.3 | |
| M2 | M1 | 62.1 ± 0.8 | 92.5 ± 1.1 |
| M3 | 64.3 ± 1.3 | 94.1 ± 0.9 | |
| M3 | M1 | 59.6 ± 1.8 | 92.8 ± 1.5 |
| M2 | 60.6 ± 1.4 | 92.1 ± 1.6 | |
| Train Set | Test Set | Action Recognition Rate (%) | |
|---|---|---|---|
| 1-Shot | 5-Shot | ||
| W1 | W2 | 53.2 ± 1.3 | 89.1 ± 1.2 |
| W3 | 51.1 ± 0.8 | 92.1 ± 1.3 | |
| W2 | W1 | 56.4 ± 0.9 | 91.2 ± 1.1 |
| W3 | 58.6 ± 0.7 | 92.6 ± 1.8 | |
| W3 | W1 | 57.4 ± 0.8 | 90.8 ± 1.1 |
| W2 | 55.2 ± 0.7 | 91.5 ± 1.3 | |
| Methods | Target | Features | Algorithms | Accuracy (%) |
|---|---|---|---|---|
| Sheng et al. [20] | 4 Actions; Environment | CSI Amplitude and phase | CNN + multilayer Bi-LSTM | >90 |
| MatNet-eCSI [28] | 6 Actions; Users | Enhanced CSI | CNN + LSTM, One-Shot Learning | 93.4 |
| CLAR [36] | Actions; Locations | CSI Amplitude | Singular Spectrum Analysis, BLSTM | >86 |
| CrossGR [38] | 15 Gestures; User, Environment | CSI Amplitude | Data Augment, GAN | >82.6 |
| CDAR [37] | 6 Actions; User, Position, Direction, Environment | CSI Amplitude | CNN + LSTM, DTW, MMD | >80 |
| ML-WiGR [39] | 5 Actions; Location, Environment, Orientation, Person | DFS, BVP | CNN + LSTM, Meta-learning | >87 |
| Wi-CHAR (Proposed) | 6 Actions; User, Environment, User + Environment | DFS | CNN, Few-Shot Learning | >93 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, Z.; Han, K.; Zhang, Z.; Dang, X. Wi-CHAR: A WiFi Sensing Approach with Focus on Both Scenes and Restricted Data. Sensors 2024, 24, 2364. https://doi.org/10.3390/s24072364
Hao Z, Han K, Zhang Z, Dang X. Wi-CHAR: A WiFi Sensing Approach with Focus on Both Scenes and Restricted Data. Sensors. 2024; 24(7):2364. https://doi.org/10.3390/s24072364
Chicago/Turabian StyleHao, Zhanjun, Kaikai Han, Zinan Zhang, and Xiaochao Dang. 2024. "Wi-CHAR: A WiFi Sensing Approach with Focus on Both Scenes and Restricted Data" Sensors 24, no. 7: 2364. https://doi.org/10.3390/s24072364
APA StyleHao, Z., Han, K., Zhang, Z., & Dang, X. (2024). Wi-CHAR: A WiFi Sensing Approach with Focus on Both Scenes and Restricted Data. Sensors, 24(7), 2364. https://doi.org/10.3390/s24072364