
Multi-Objective Task-Aware Offloading and Scheduling Framework for Internet of Things Logistics



Abstract
1. Introduction
- The following are the main contributions of the research:
- ✓
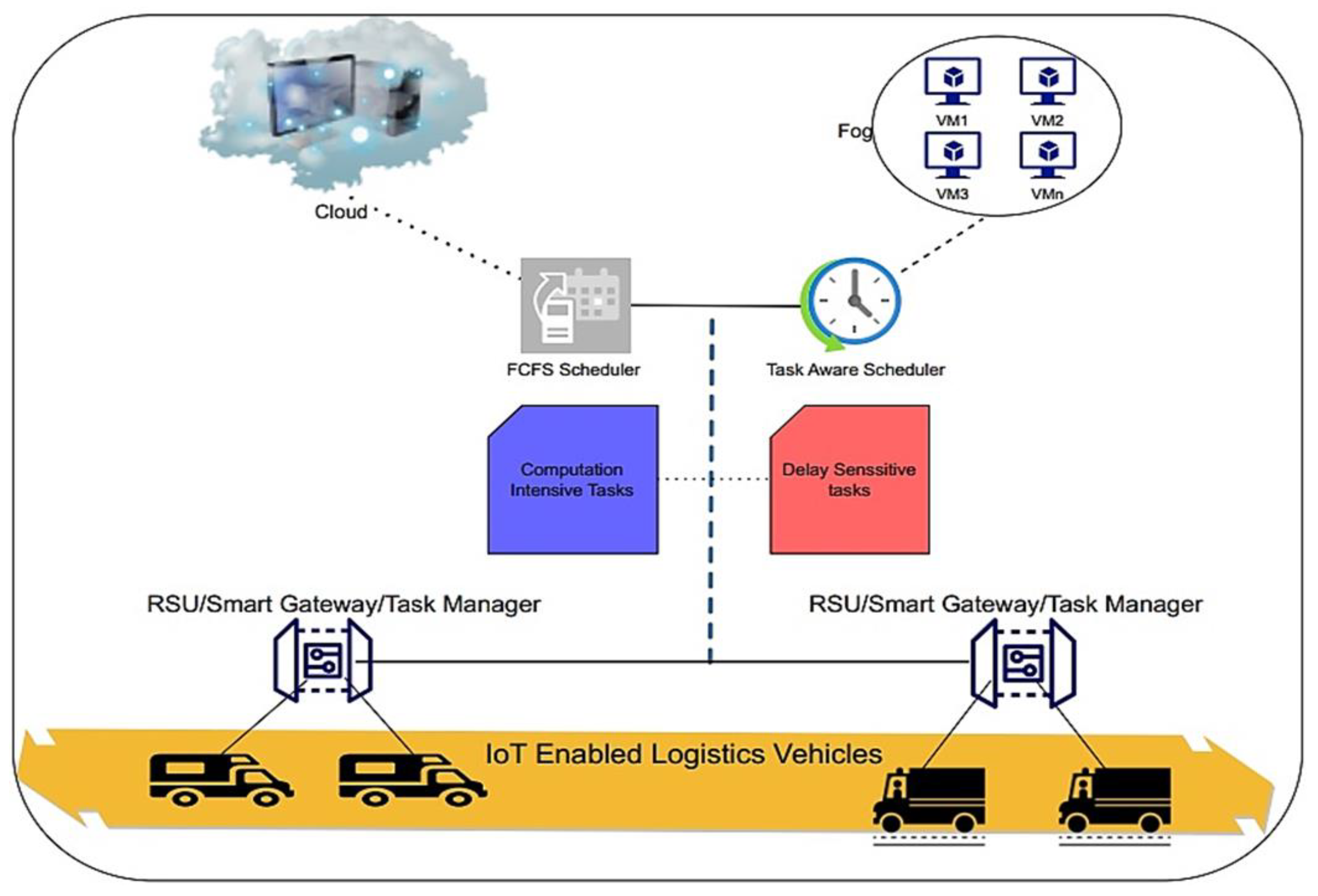
- IoT-enabled logistics vehicle tasks are classified as delay-sensitive and computation-intensive using the MT-OSF priority-based offloader to execute the important task on a priority basis on nearby fog nodes. Computation-intensive tasks are executed on cloud nodes using the FCFS algorithm.
- ✓
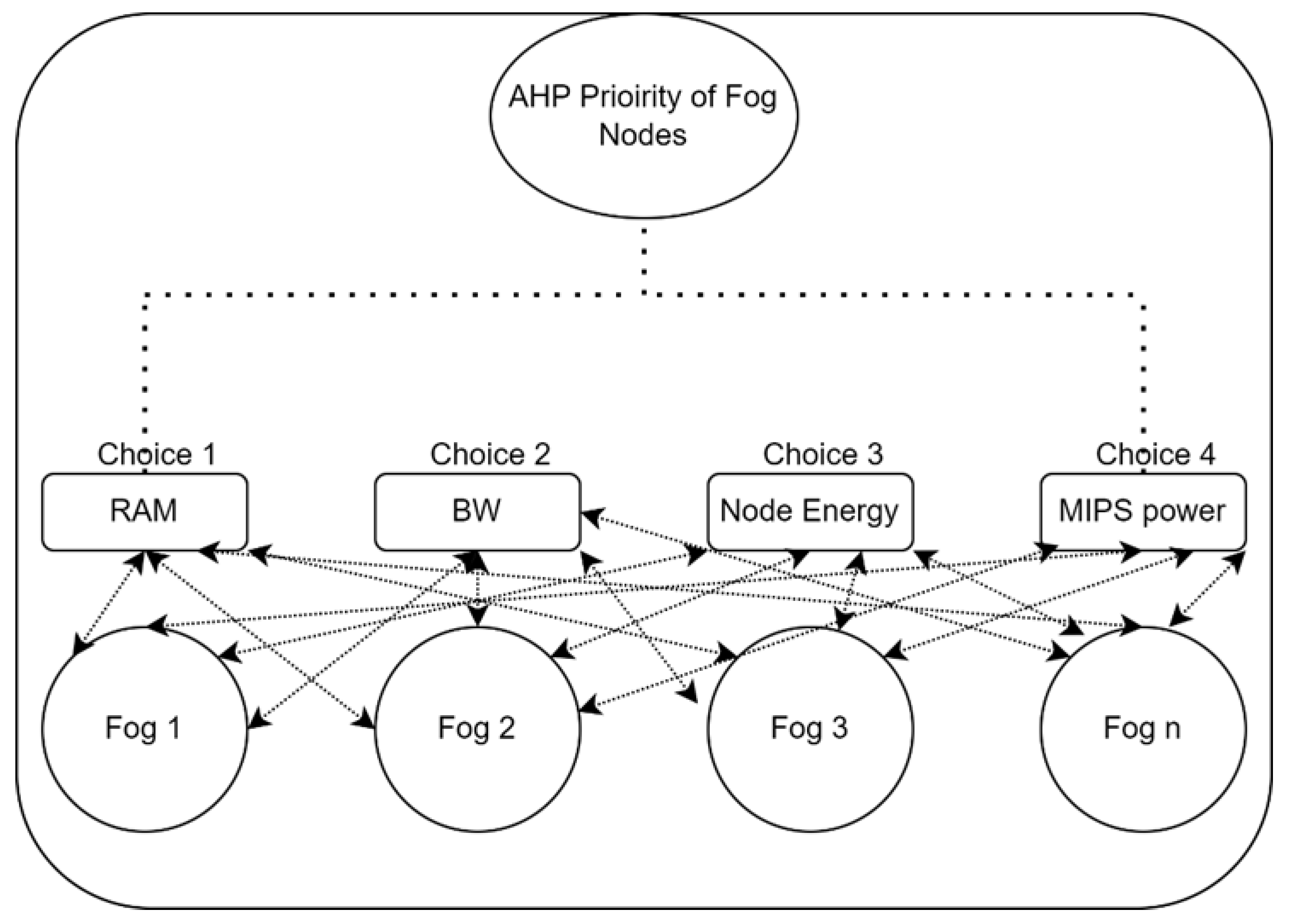
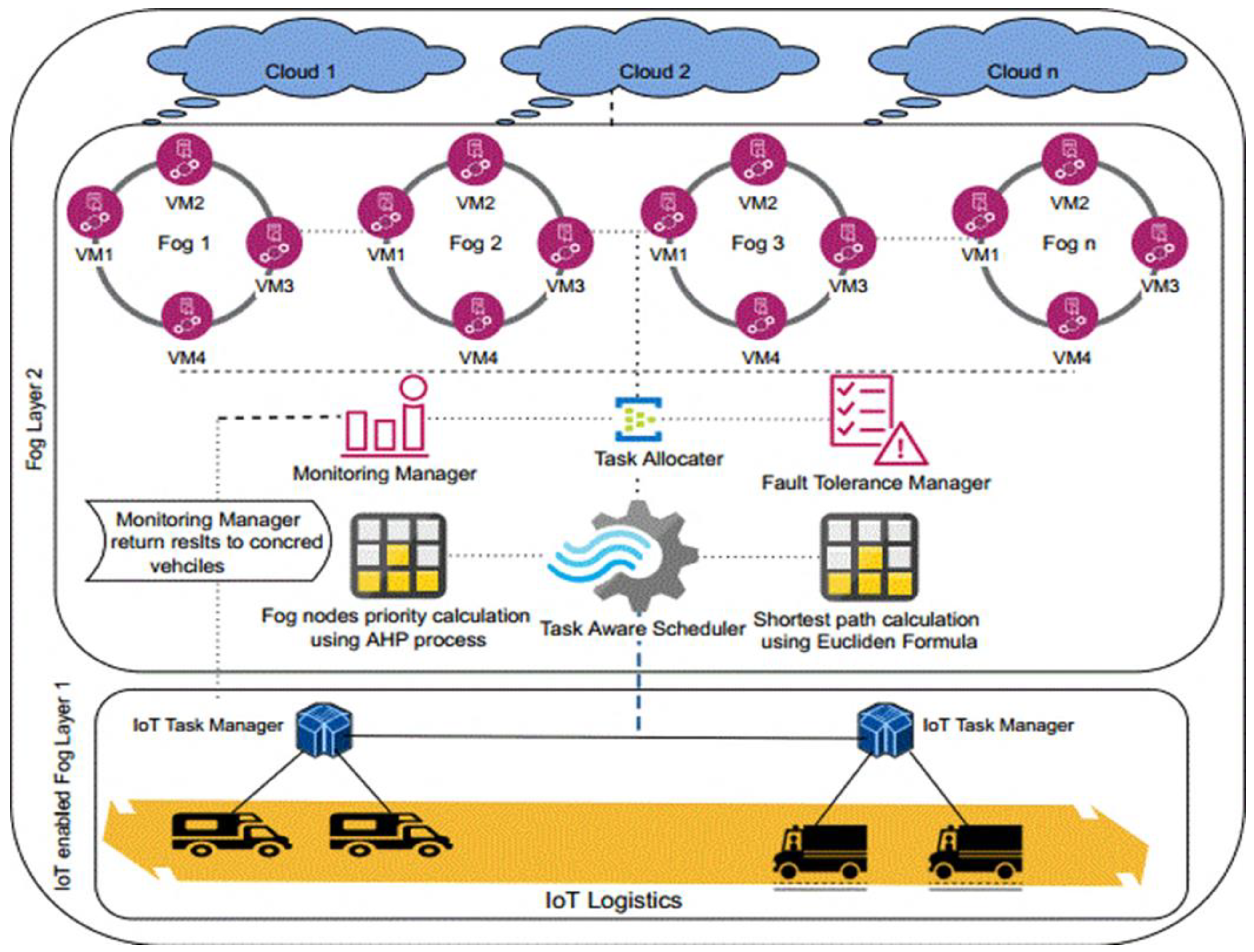
- The MT-OSF Task-Aware Scheduler is proposed to allocate the offloaded tasks to the most efficient fog node. The analytical hierarchy process (AHP) is used to prioritize the most efficient fog node for IoT task execution and scheduling while considering RAM, BW, MIPS, and node energy.
- ✓
- The Euclidean formula is used to calculate the shortest distance between the fog node and the IoT-enabled vehicle to whom the tasks are allocated for execution to reduce response time. Fault-tolerant manager is used and followed by task retry and node transfer mechanisms in case of task failure and fog node failure in the MT-OSF Task-Aware Scheduler to reduce the task failure ratio.
- ✓
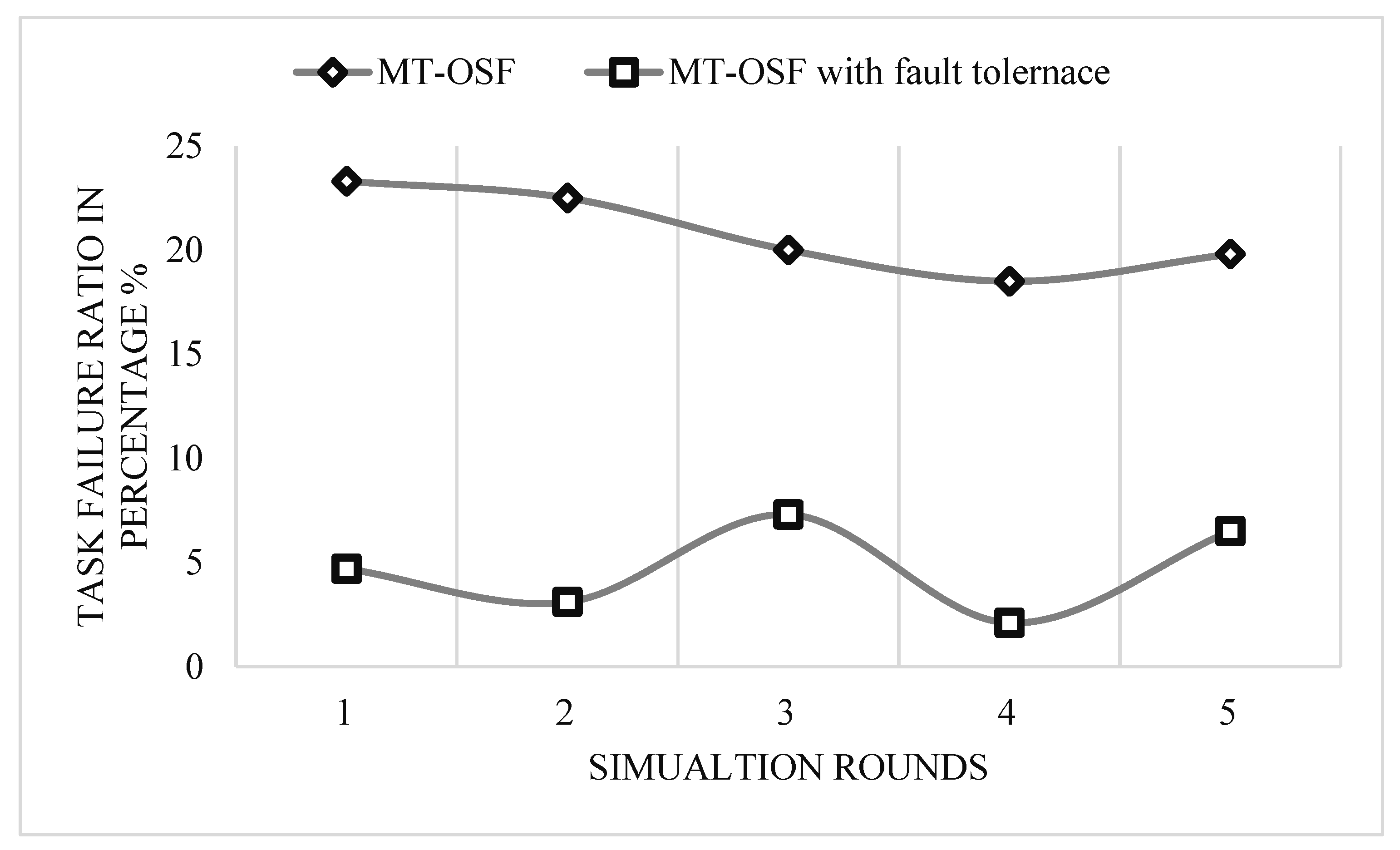
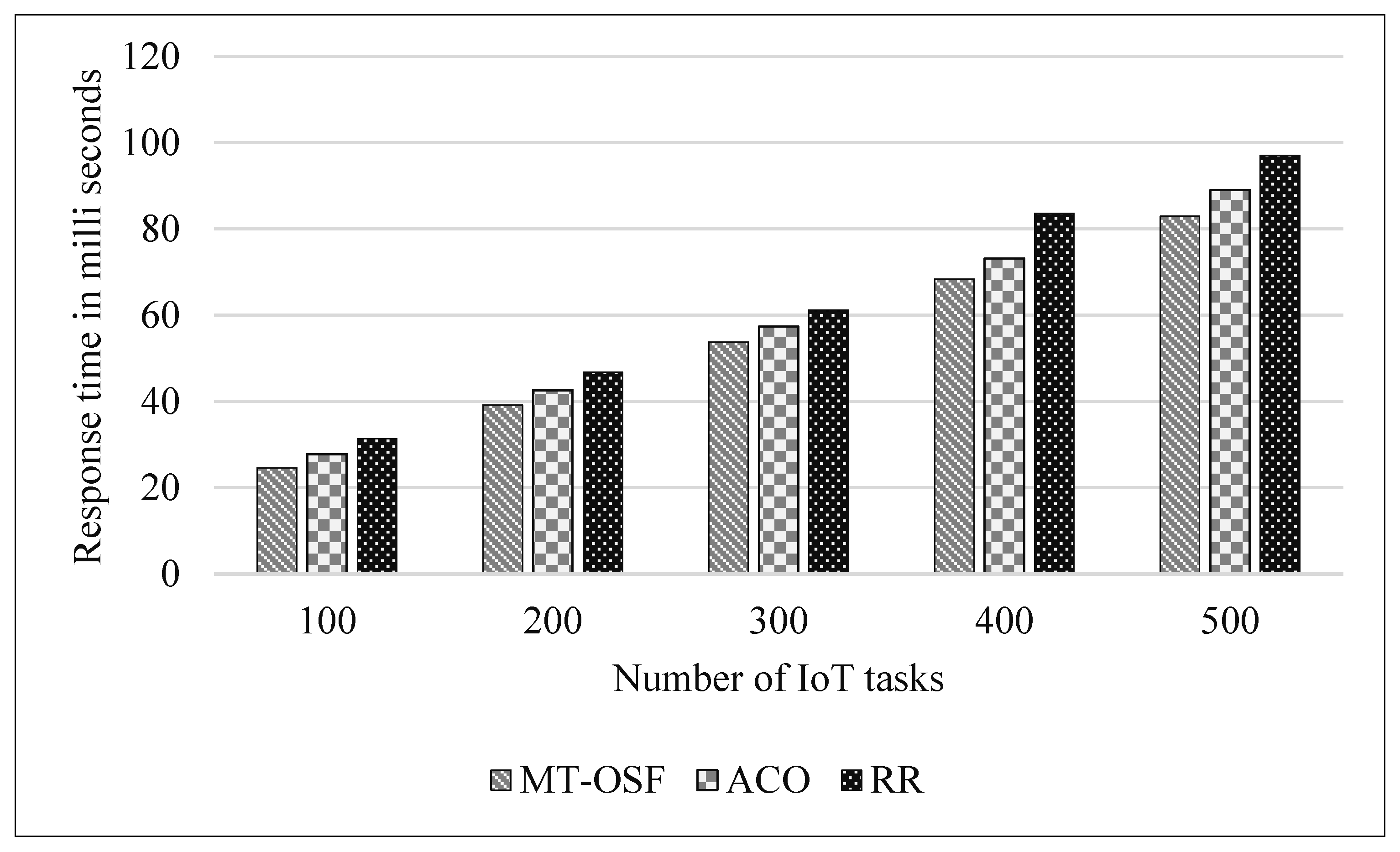
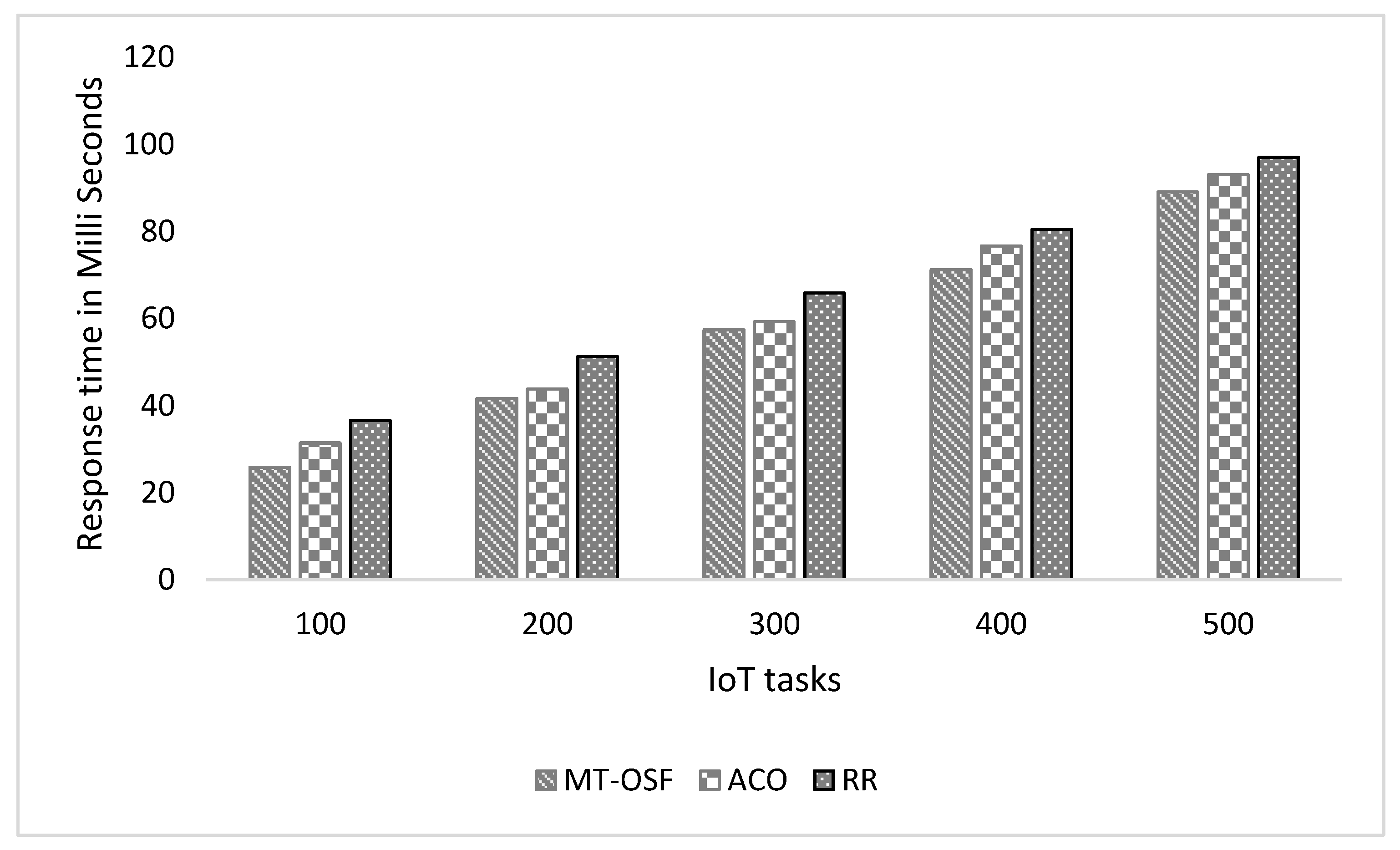
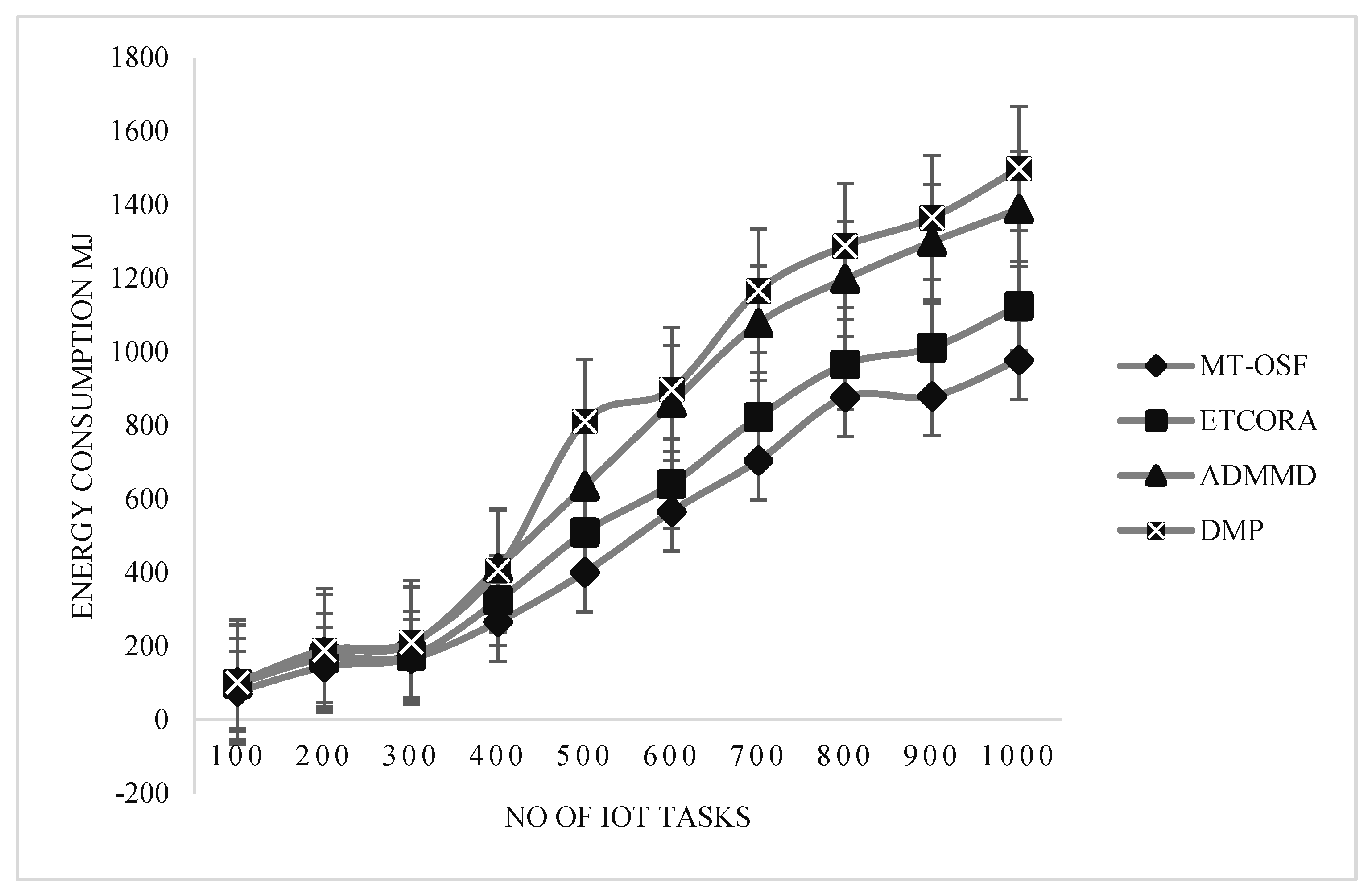
- By comparing the proposed MT-OSF with other standard algorithms, including Ant Colony Optimization and Round Robin, etc., we evaluated the system performance of the proposed MT-OSF. The suggested approach decreased the task failure ratio by 22%, reaction time by 7%, and energy usage by 16%.
2. Related Work
3. Proposed Work
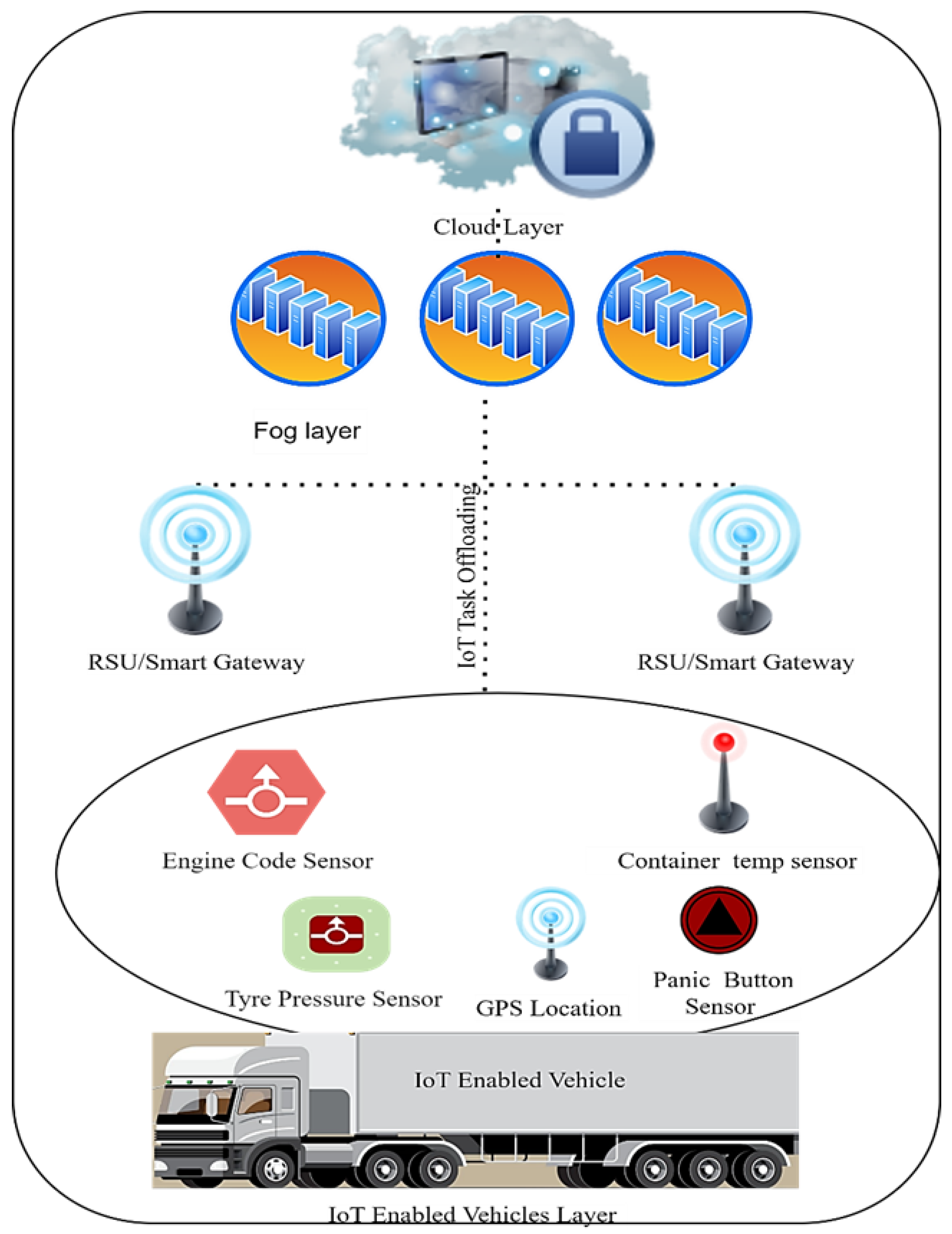
3.1. System Architecture
3.2. Proposed Work/MT-OSF
| Algorithm 1. IoT task offloading and task categorization as delay-sensitive and computation-intensive based on required resources and deadline. |
 |
| Algorithm 2. Fault-tolerance-based IoT tasks scheduling on fog nodes using a multi-criterion decision-making process (AHP) and shortest distance calculation using the Euclidean formula. |
 |
4. Simulation Setup and Results
4.1. Resource Modelling
4.2. Evaluation Parameters
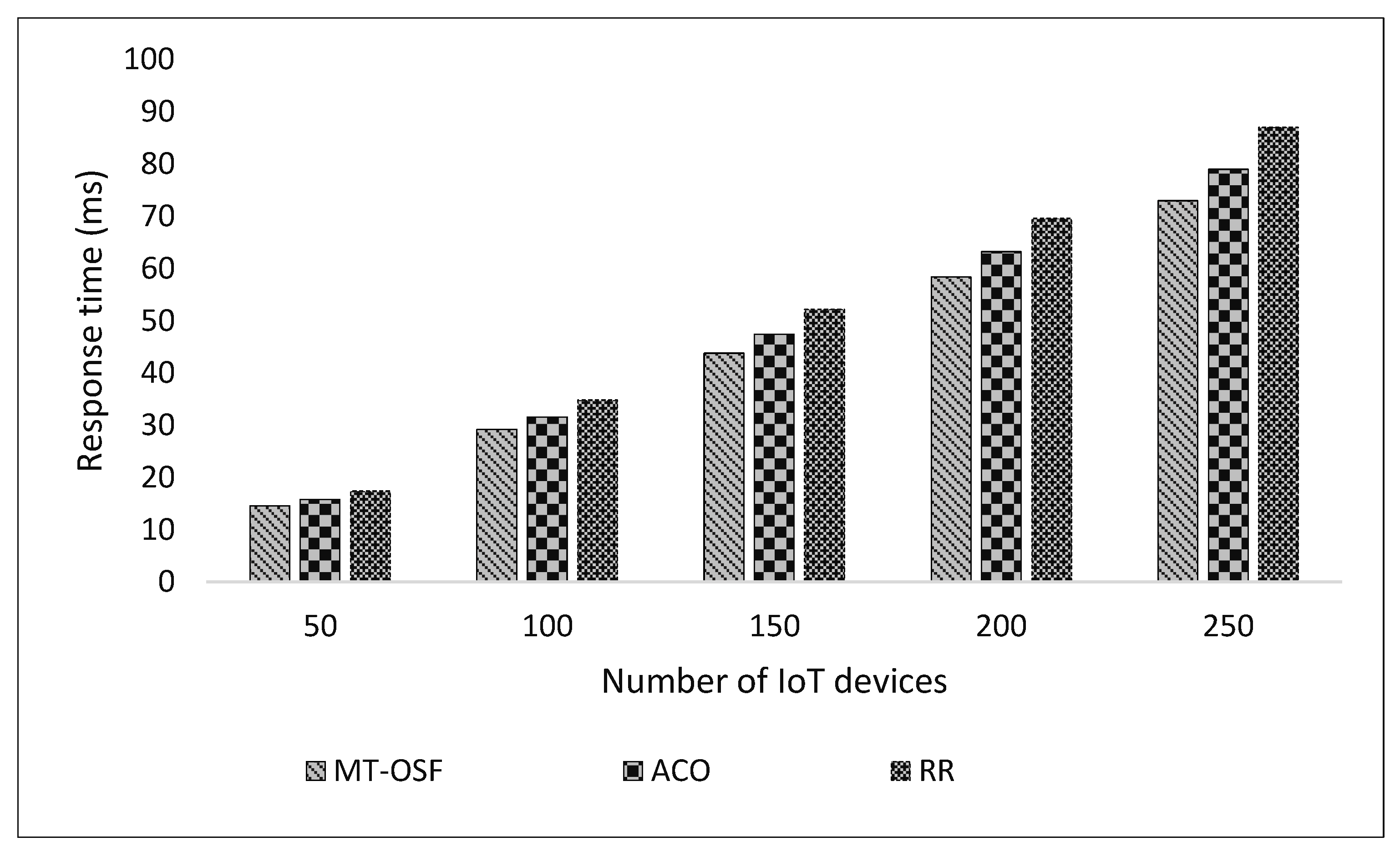
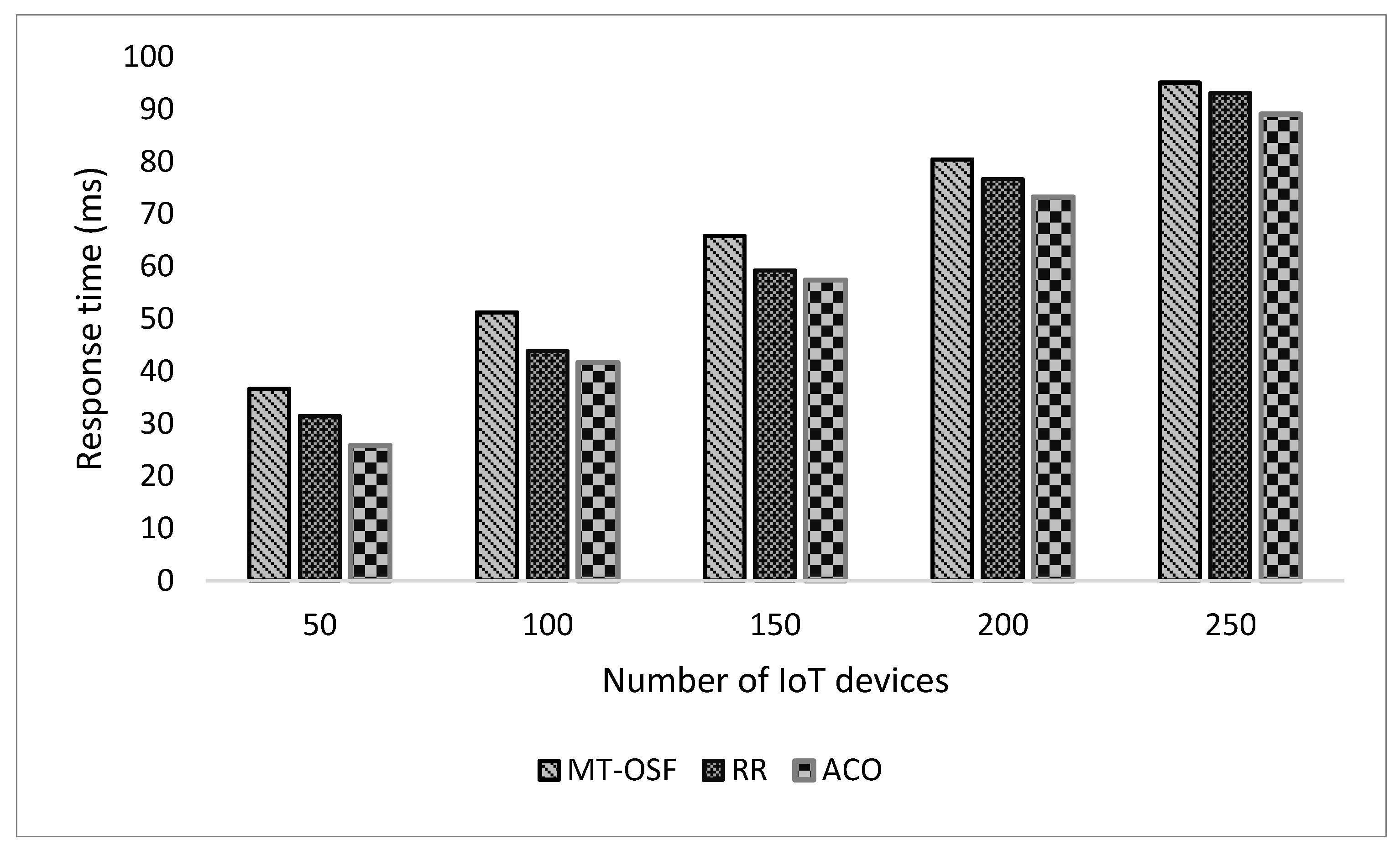
4.2.1. Response Time
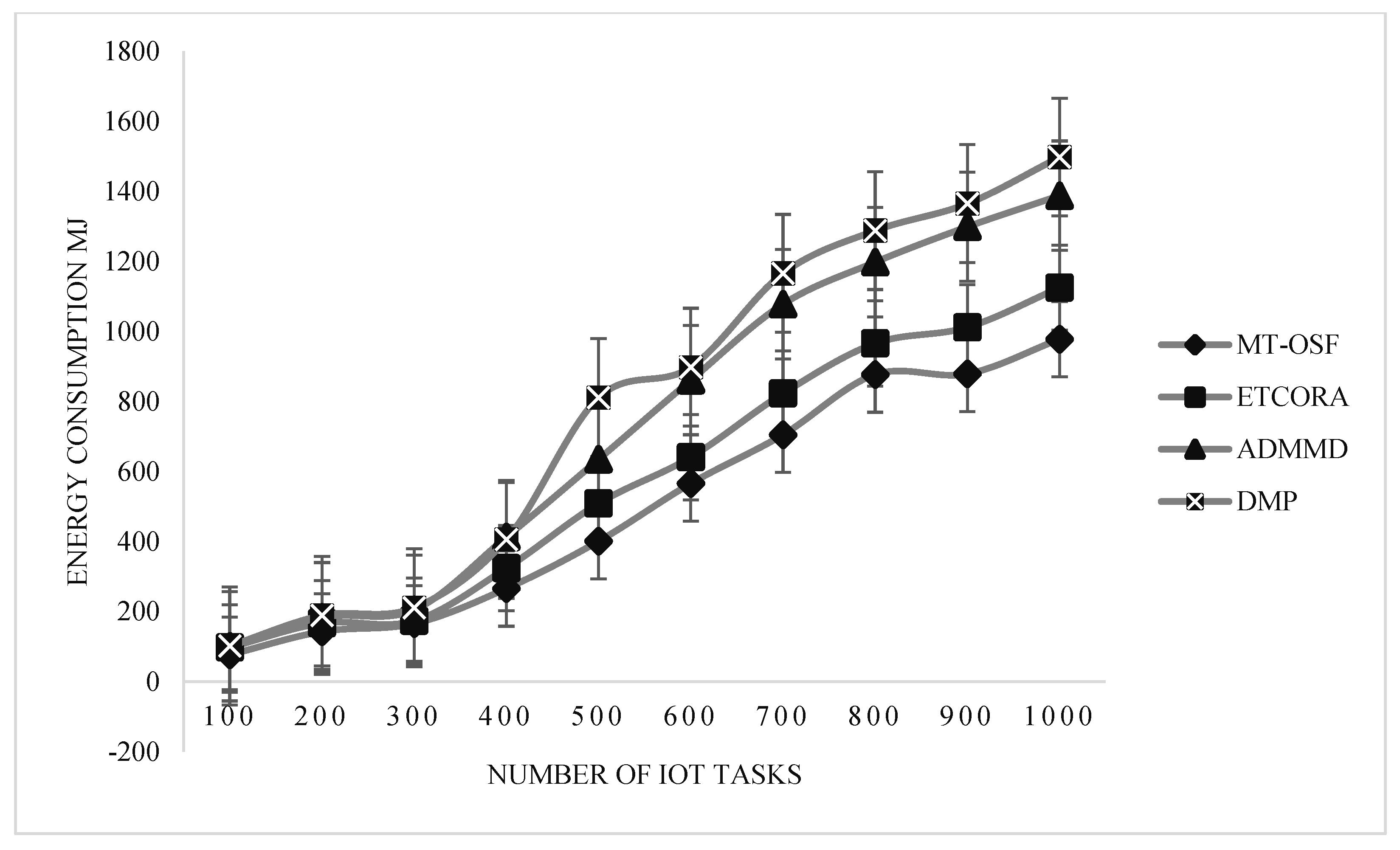
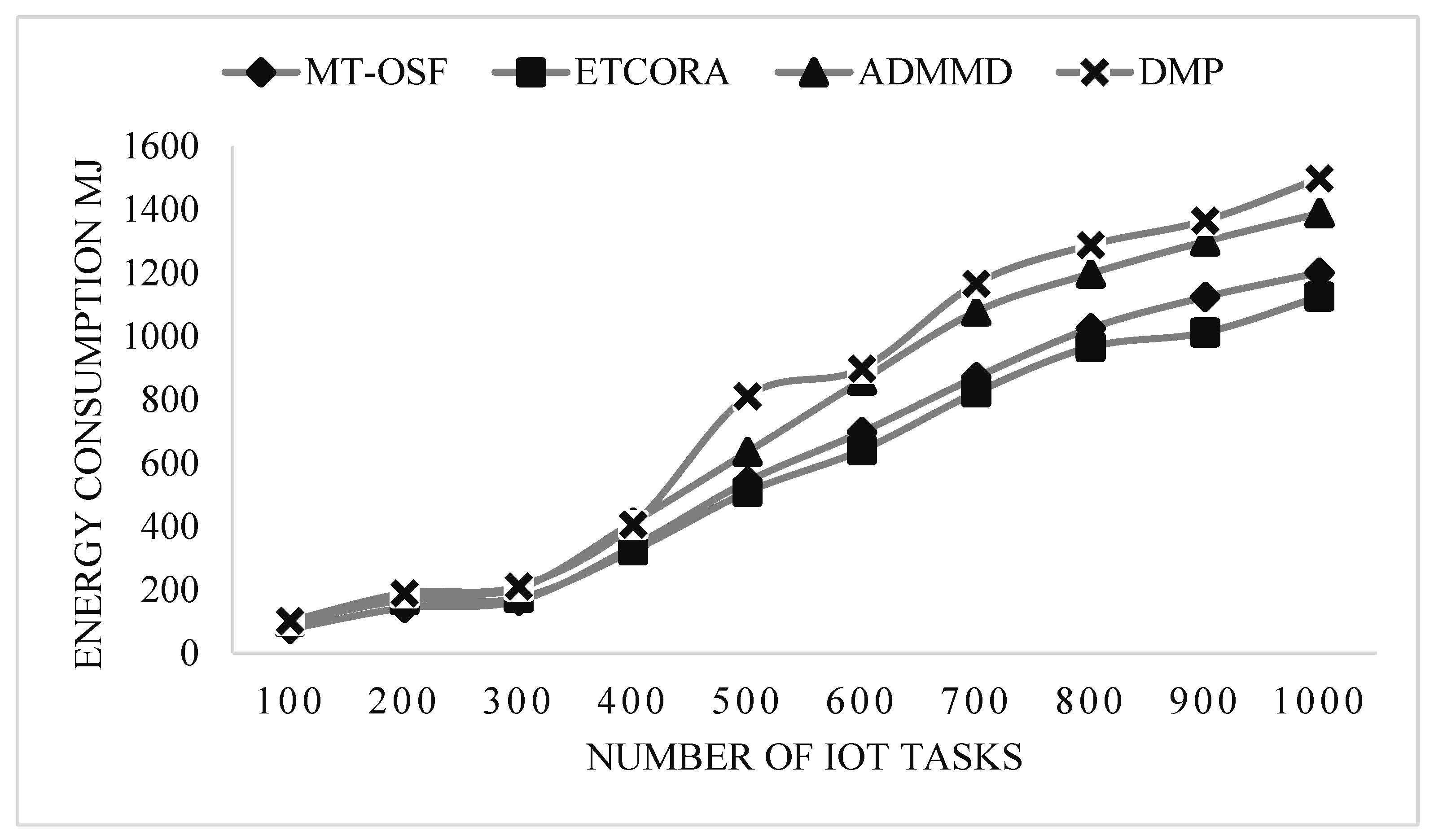
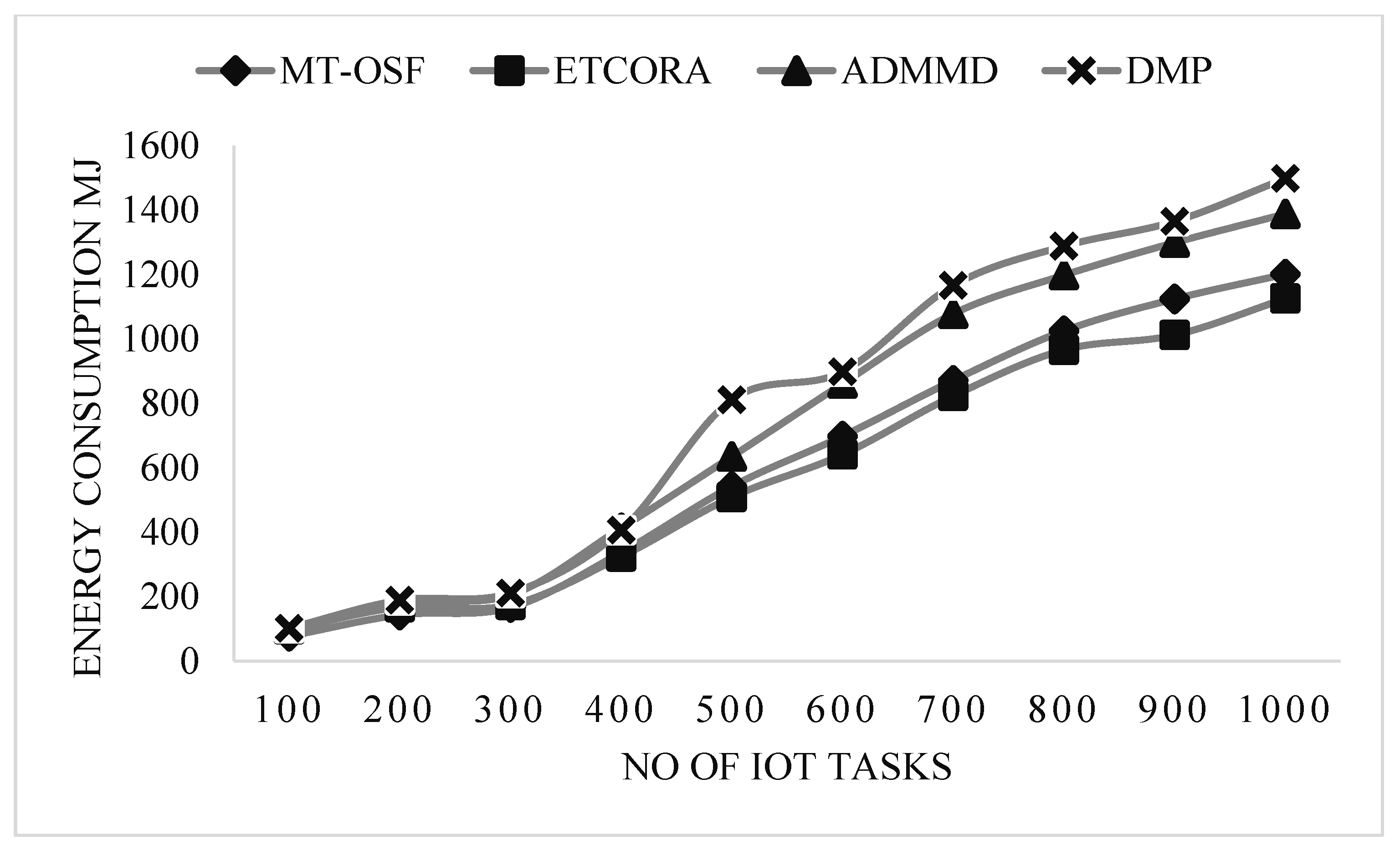
4.2.2. Energy Consumption
4.2.3. Task Failure Ratio
4.3. Results
4.3.1. Scenario 1
4.3.2. Scenario 2
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hussein, M.K.; Mousa, M.H. Efficient task offloading for IoT-based applications in fog computing using ant colony optimization. IEEE Access 2020, 8, 37191–37201. [Google Scholar] [CrossRef]
- Keshavarznejad, M.; Rezvani, M.H.; Adabi, S. Delay-aware optimization of energy consumption for task offloading in fog environments using metaheuristic algorithms. Clust. Comput. 2021, 24, 1825–1853. [Google Scholar] [CrossRef]
- Ding, Y.; Jin, M.; Li, S.; Feng, D. Smart logistics based on the internet of things technology: An overview. Int. J. Logist. Res. Appl. 2021, 24, 323–345. [Google Scholar] [CrossRef]
- Song, Y.; Yu, F.R.; Zhou, L.; Yang, X.; He, Z. Applications of the Internet of Things (IoT) in smart logistics: A comprehensive survey. IEEE Internet Things J. 2020, 8, 4250–4274. [Google Scholar] [CrossRef]
- Abosuliman, S.S.; Almagrabi, A.O. Routing and scheduling of intelligent autonomous vehicles in industrial logistics systems. Soft Comput. 2021, 25, 11975–11988. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, T.; Huang, K.; Chen, F. Efficient dispatching system of railway vehicles based on internet of things technology. Pattern Recognit. Lett. 2021, 143, 14–18. [Google Scholar] [CrossRef]
- Golpîra, H.; Khan, S.A.R.; Safaeipour, S. A review of logistics internet-of-things: Current trends and scope for future research. J. Ind. Inf. Integr. 2021, 22, 100194. [Google Scholar] [CrossRef]
- Zabihi, Z.; Moghadam, A.M.E.; Rezvani, M.H. Reinforcement Learning Methods for Computing Offloading: A Systematic Review. ACM Comput. Surv. 2023, 56, 17. [Google Scholar]
- Oladimeji, D.; Gupta, K.; Kose, N.A.; Gundogan, K.; Ge, L.; Liang, F. Smart transportation: An overview of technologies and applications. Sensors 2023, 23, 3880. [Google Scholar] [CrossRef] [PubMed]
- Feki, E.; Mlaouah, C.; Bouguezzi, C.; Mami, A. GPS-GPRS Control and Tracking System for Taxi Vehicle. In Proceedings of the 2023 IEEE International Conference on Advanced Systems and Emergent Technologies (IC_ASET), Hammamet, Tunisia, 29 April–1 May 2023; IEEE: Piscataway, NY, USA, 2023; pp. 1–6. [Google Scholar]
- Ahmed, N.; Gharghan, S.K.; Mutlag, A.H. IoT-based child tracking using RFID and GPS. Int. J. Comput. Appl. 2023, 45, 367–378. [Google Scholar] [CrossRef]
- Sukode, S.; Gite, S. Vehicle traffic congestion control & monitoring system in IoT. Int. J. Appl. Eng. Res. 2015, 10, 19513–19523. [Google Scholar]
- Yan, Y. Research on the innovation path of logistics formats based on 5G technology. Open J. Bus. Manag. 2019, 7, 1936–1942. [Google Scholar] [CrossRef][Green Version]
- Yuehong, Y.I.N.; Zeng, Y.; Chen, X.; Fan, Y. The internet of things in healthcare: An overview. J. Ind. Inf. Integr. 2016, 1, 3–13. [Google Scholar]
- Liu, W.; Aiyun, Z.; Hongwei, L.; Menglin, Q.; Ruoqi, W. Dangerous goods dynamic monitoring and controlling system based on IOT and RFID. In Proceedings of the 2012 24th Chinese Control and Decision Conference (CCDC), Taiyuan, China, 23–25 May 2012; IEEE: Piscataway, NY, USA, 2012; pp. 4171–4175. [Google Scholar]
- Forcolin, M.; Fracasso, E.; Tumanischvili, F.; Lupieri, P. EURIDICE—IoT applied to logistics using the Intelligent Cargo concept. In Proceedings of the 2011 17th International Conference on Concurrent Enterprising, Aachen, Germany, 20–22 June 2011; IEEE: Piscataway, NY, USA, 2011; pp. 1–9. [Google Scholar]
- Choudhari, S.D.; Giripunje, V.G. Remote healthcare monitoring system for driver’s community based on IoT. Int. J. Emerg. Eng. Res. 2016, 4, 118–121. [Google Scholar]
- Huang, C.; Lu, R.; Choo, K.-K.R. Vehicular fog computing: Architecture, use case, and security and forensic challenges. IEEE Commun. Mag. 2017, 55, 105–111. [Google Scholar] [CrossRef]
- Jiang, T.; Fang, H.; Wang, H. Blockchain-based internet of vehicles: Distributed network architecture and performance analysis. IEEE Internet Things J. 2018, 6, 4640–4649. [Google Scholar] [CrossRef]
- Mohammed, K.; Abdelhafid, M.; Kamal, K.; Ismail, N.; Ilias, A. Intelligent driver monitoring system: An Internet of Things-based system for tracking and identifying the driving behavior. Comput. Stand. Interfaces 2023, 84, 103704. [Google Scholar] [CrossRef]
- Behravan, K.; Farzaneh, N.; Jahanshahi, M.; Seno, S.A.H. A Comprehensive Survey on Using Fog Computing in Vehicular Networks. Veh. Commun. 2023, 42, 100604. [Google Scholar] [CrossRef]
- Zhang, J.; Xin, Y.; Wang, Y.; Lei, X.; Yang, Y. Secure Blockchain-Enabled Internet of Vehicles Scheme with Privacy Protection. Comput. Mater. Contin. 2023, 75, 6186–6199. [Google Scholar] [CrossRef]
- Zaman, S.K.U.; Jehangiri, A.I.; Maqsood, T.; Haq, N.U.; Umar, A.I.; Shuja, J.; Ahmad, Z.; Ben Dhaou, I.; Alsharekh, M.F. LiMPO: Lightweight mobility prediction and offloading framework using machine learning for mobile edge computing. Clust. Comput. 2023, 26, 99–117. [Google Scholar] [CrossRef]
- Sellami, B.; Hakiri, A.; Ben Yahia, S. Deep Reinforcement Learning for energy-aware task offloading in join SDN-Blockchain 5G massive IoT edge network. Future Gener. Comput. Syst. 2022, 137, 363–379. [Google Scholar] [CrossRef]
- Yasir, M.; Zaman, S.K.U.; Maqsood, T.; Rehman, F.; Mustafa, S. CoPUP: Content popularity and user preferences aware content caching framework in mobile edge computing. Clust. Comput. 2023, 26, 267–281. [Google Scholar] [CrossRef]
- Tu, Y.; Chen, H.; Yan, L.; Zhou, X. Task offloading based on LSTM prediction and deep reinforcement learning for efficient edge computing in IoT. Future Internet 2022, 14, 30. [Google Scholar] [CrossRef]
- Haseeb-Ur-Rehman, R.M.A.; Aman, A.H.M.; Hasan, M.K.; Ariffin, K.A.Z.; Namoun, A.; Tufail, A.; Kim, K.-H. High-Speed Network DDoS Attack Detection: A Survey. Sensors 2023, 23, 6850. [Google Scholar] [CrossRef]
- Mohamadi, H.E.; Lahlou, L.; Kara, N.; Leivadeas, A. A versatile chaotic cryptosystem with a novel substitution-permutation scheme for internet-of-drones photography. Nonlinear Dyn. 2024, 112, 4977–5012. [Google Scholar] [CrossRef]
- Li, H.; Li, X.; Xu, J.; Chen, L. Entropy based swarm intelligent searching for scheduling deadline constrained workflows in hybrid cloud. Int. J. Mach. Learn. Cybern. 2023, 15, 1183–1199. [Google Scholar] [CrossRef]
- Asghari, A.; Sohrabi, M.K. Server placement in mobile cloud computing: A comprehensive survey for edge computing, fog computing and cloudlet. Comput. Sci. Rev. 2024, 51, 100616. [Google Scholar] [CrossRef]
- Reddy, P.B.; Sudhakar, C. An osmotic approach-based dynamic deadline-aware task offloading in edge–fog–cloud computing environment. J. Supercomput. 2023, 79, 20938–20960. [Google Scholar] [CrossRef]
- Kumar, M.; Kishor, A.; Samariya, J.K.; Zomaya, A.Y. An autonomic workload prediction and resource allocation framework for fog enabled industrial IoT. IEEE Internet Things J. 2023, 10, 9513–9522. [Google Scholar] [CrossRef]
- Akhlaqi, M.Y.; Hanapi, Z.B.M. Task offloading paradigm in mobile edge computing-current issues, adopted approaches, and future directions. J. Netw. Comput. Appl. 2023, 212, 103568. [Google Scholar] [CrossRef]
- Rehman, A.U.; Ahmad, Z.; Jehangiri, A.I.; Ala’Anzy, M.A.; Othman, M.; Umar, A.I.; Ahmad, J. Dynamic energy efficient resource allocation strategy for load balancing in fog environment. IEEE Access 2020, 8, 199829–199839. [Google Scholar] [CrossRef]
- Phan, L.-A.; Nguyen, D.-T.; Lee, M.; Park, D.-H.; Kim, T. Dynamic fog-to-fog offloading in SDN-based fog computing systems. Future Gener. Comput. Syst. 2021, 117, 486–497. [Google Scholar] [CrossRef]
- Shahryari, O.-K.; Pedram, H.; Khajehvand, V.; TakhtFooladi, M.D. Energy and task completion time trade-off for task offloading in fog-enabled IoT networks. Pervasive Mob. Comput. 2021, 74, 101395. [Google Scholar] [CrossRef]
- Sharma, S.; Jain, R. EACO: An enhanced ant colony optimization algorithm for task scheduling in cloud computing. Int. J. Secur. Its Appl. 2019, 13, 91–100. [Google Scholar] [CrossRef]
- Hazra, A.; Adhikari, M.; Amgoth, T.; Srirama, S.N. Joint computation offloading and scheduling optimization of IoT applications in fog networks. IEEE Trans. Netw. Sci. Eng. 2020, 7, 3266–3278. [Google Scholar] [CrossRef]
- Sun, H.; Yu, H.; Fan, G.; Chen, L. Energy and time efficient task offloading and resource allocation on the generic IoT-fog-cloud architecture. Peer-Peer Netw. Appl. 2020, 13, 548–563. [Google Scholar] [CrossRef]
- Maray, M.; Mustafa, E.; Shuja, J.; Bilal, M. Dependent task offloading with deadline-aware scheduling in mobile edge networks. Internet Things 2023, 23, 100868. [Google Scholar] [CrossRef]
- Mahmud, R.; Pallewatta, S.; Goudarzi, M.; Buyya, R. Ifogsim2: An extended ifogsim simulator for mobility, clustering, and microservice management in edge and fog computing environments. J. Syst. Softw. 2022, 190, 111351. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Response Time | Task Priority | Energy Consumption | Fault Tolerance | Multi-Criteria-Based Fog Node Allocation | Simulation Tool Used |
|---|---|---|---|---|---|---|
| [1] | √ | × | × | × | × | MATLAB-R2023b |
| [11] | √ | × | × | × | × | Arduino based IoT real setup |
| [32] | √ | × | × | × | × | iFogSim2 |
| [33] | × | × | √ | × | × | iFogSim |
| [34] | × | × | √ | × | × | MATLAB |
| [35] | √ | × | × | × | × | iFogSim |
| [36] | × | × | √ | × | × | iFogSim |
| [37] | √ | × | × | × | × | CloudSim 3.0.3 |
| [38] | √ | × | √ | × | × | SIMUL8 |
| [39] | √ | × | √ | × | × | iFogSim |
| [40] | √ | √ | √ | × | × | C++ based NS3 Tool |
| MT-OSF Proposed Model | √ | √ | √ | √ | √ | iFogSim2 |
| Symbol | Abbreviation | Symbol | Abbreviation |
|---|---|---|---|
| TAS | Task-Aware Scheduler | Task generated by logistic vehicle IoT device | |
| SG | Smart Gateway | VM | Virtual Machine |
| VIoT | IoT devices placed in vehicles | V | IoT-enabled vehicle |
| ACO | Ant Colony Optimization | MIPS | Million instruction per second |
| PSO | Particle swarm optimization | BW | Bandwidth |
| RAM | Random access memory | IoT | Internet of Things |
| Ω | Delay-sensitive tasks | ω | Computation-intensive tasks |
| Šs | Execution requirement for the tasks | Times | Execution time required |
| AHP | Analytic hierarchy process | Weight of the IoT task | |
| NE | Fog node energy | FN | Fog node |
| Shortest distance between fog node and IoT device | W | Weight of the fog node, BW, MIPS power, RAM, and node energy | |
| C.W | Cumulative weight (combined weight of the four parameters) | GPS | Global positioning System |
| N | IoT-based vehicles | S | IoT tasks |
| M | IoT devices/sensors | z | No of fog nodes |
| X | No of cloud nodes | T | No of Virtual Machines |
| S. No | Simulation Parameters | Value | Description |
|---|---|---|---|
| 1 | Cloudx | 1 | One cloud data center created |
| 2 | 10 | 10 fog nodes created | |
| 3 | Šs | 5–10 MIPS | Each task processing requirement |
| 4 | Times | 2–6 ms | Each task required time for execution |
| 5 | Smart Gateways | 2 | Each gateway connected with 5 fog nodes |
| 6 | Logistics Vehicles | 5 | -- |
| 7 | IoT devices/Sensors | 50 × 5 = 250 | Each vehicle has 50 sensers placed in it |
| 8 | BW | 5–10 MHz | Bandwidth for communication lines |
| 9 | Processing Capabilities | 50–100 MIPS & 500 to 1000 MIPS | Fog nodes and cloud nodes processing power |
| 10 | Task Size | 250 kb–1 MB | -- |
| 11 | Latency from IoT device to fog | 2–20 ms | -- |
| 12 | Latency from IoT device to cloud | 30 ms | -- |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Umer, A.; Ali, M.; Jehangiri, A.I.; Bilal, M.; Shuja, J. Multi-Objective Task-Aware Offloading and Scheduling Framework for Internet of Things Logistics. Sensors 2024, 24, 2381. https://doi.org/10.3390/s24082381
Umer A, Ali M, Jehangiri AI, Bilal M, Shuja J. Multi-Objective Task-Aware Offloading and Scheduling Framework for Internet of Things Logistics. Sensors. 2024; 24(8):2381. https://doi.org/10.3390/s24082381
Chicago/Turabian StyleUmer, Asif, Mushtaq Ali, Ali Imran Jehangiri, Muhammad Bilal, and Junaid Shuja. 2024. "Multi-Objective Task-Aware Offloading and Scheduling Framework for Internet of Things Logistics" Sensors 24, no. 8: 2381. https://doi.org/10.3390/s24082381
APA StyleUmer, A., Ali, M., Jehangiri, A. I., Bilal, M., & Shuja, J. (2024). Multi-Objective Task-Aware Offloading and Scheduling Framework for Internet of Things Logistics. Sensors, 24(8), 2381. https://doi.org/10.3390/s24082381