
Observer-Based Adaptive Sliding Mode Compensation Position-Tracking Control for Drilling Tool Attitude Adjustment
 , and
, and
Abstract
:1. Introduction
2. Drilling Tool Attitude Adjustment System and Theoretical Foundations
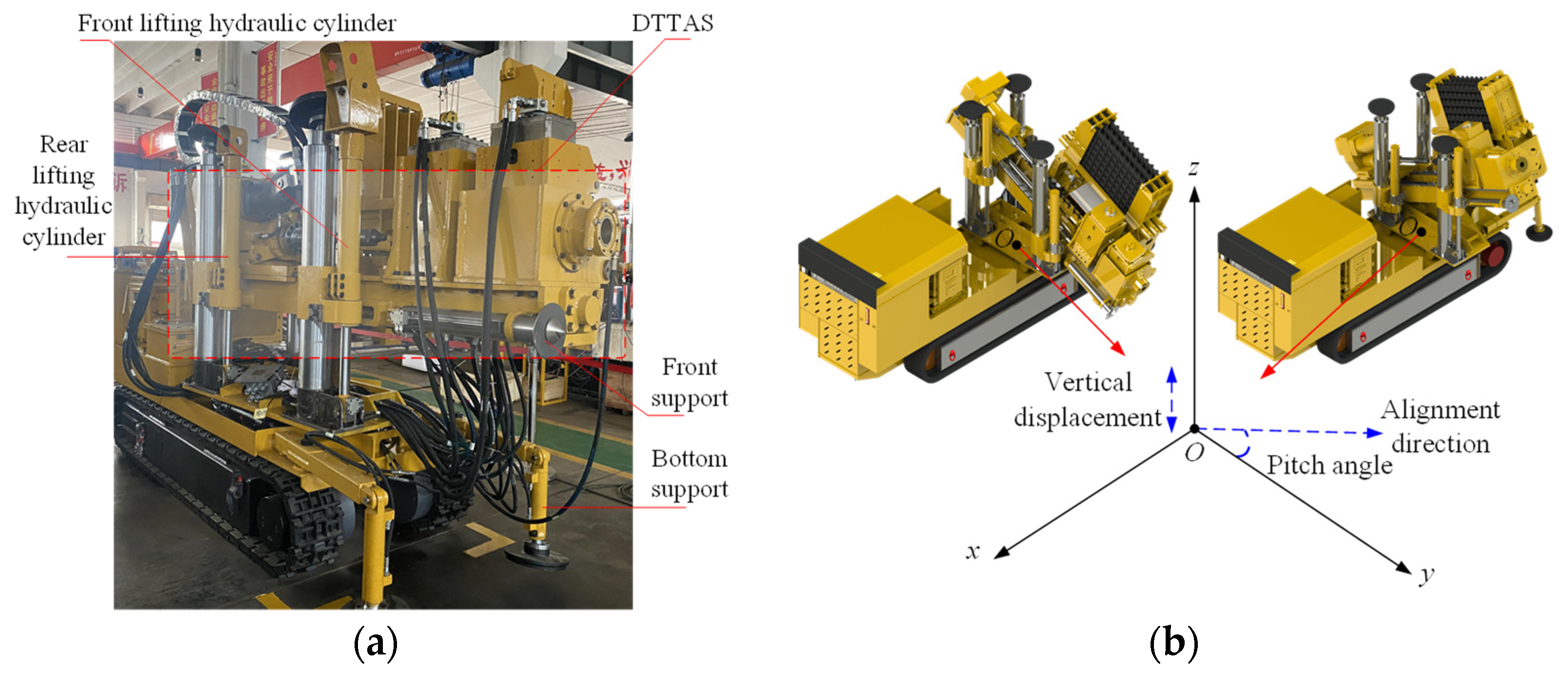
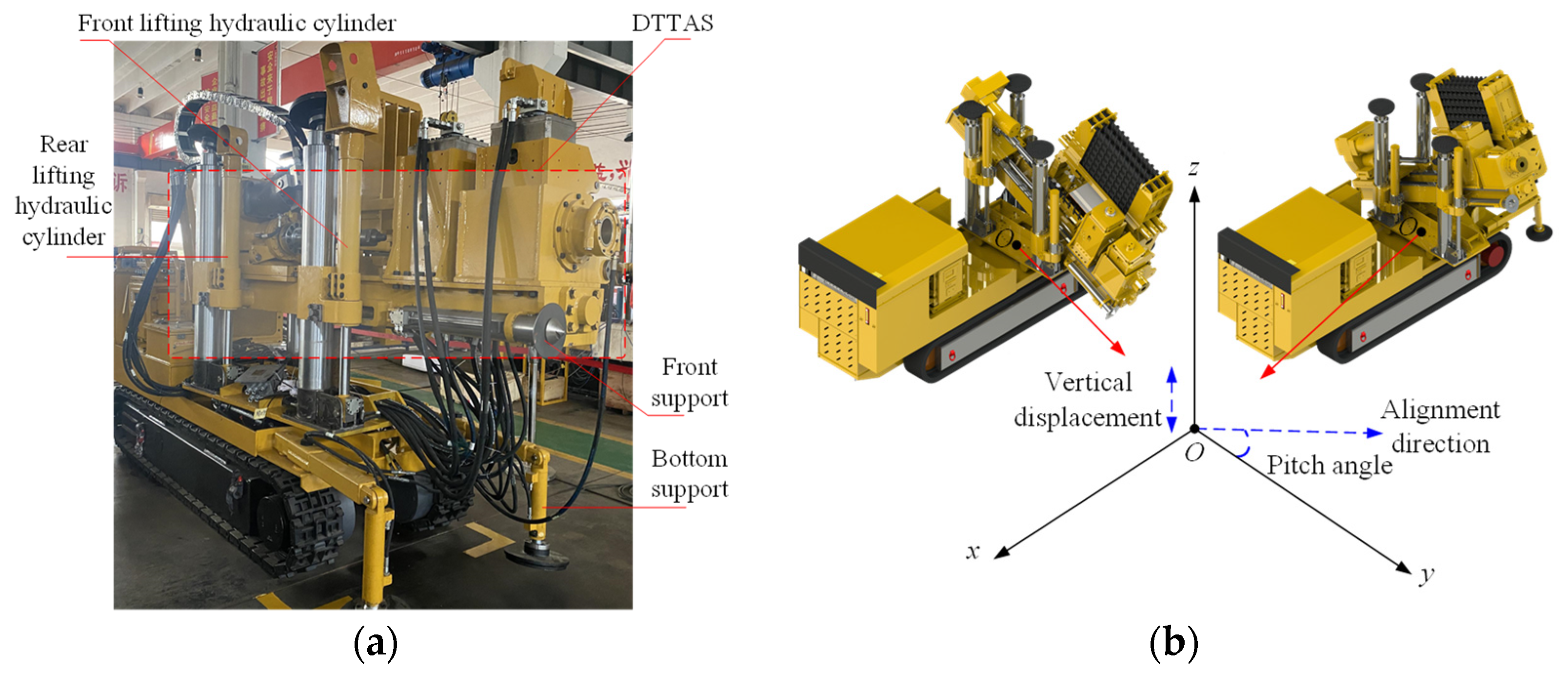
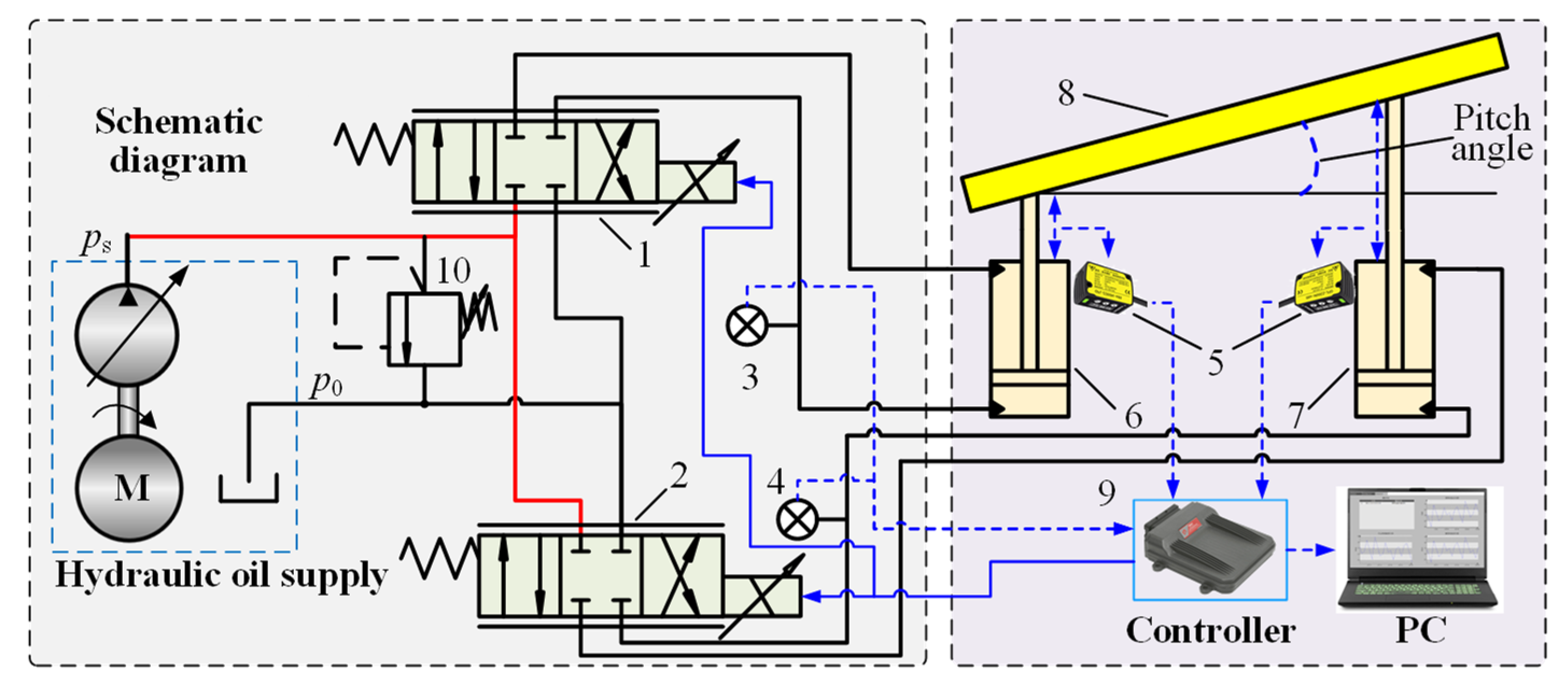
2.1. System Description
2.2. Mathematical Model of the Drilling Tool Attitude Adjustment System
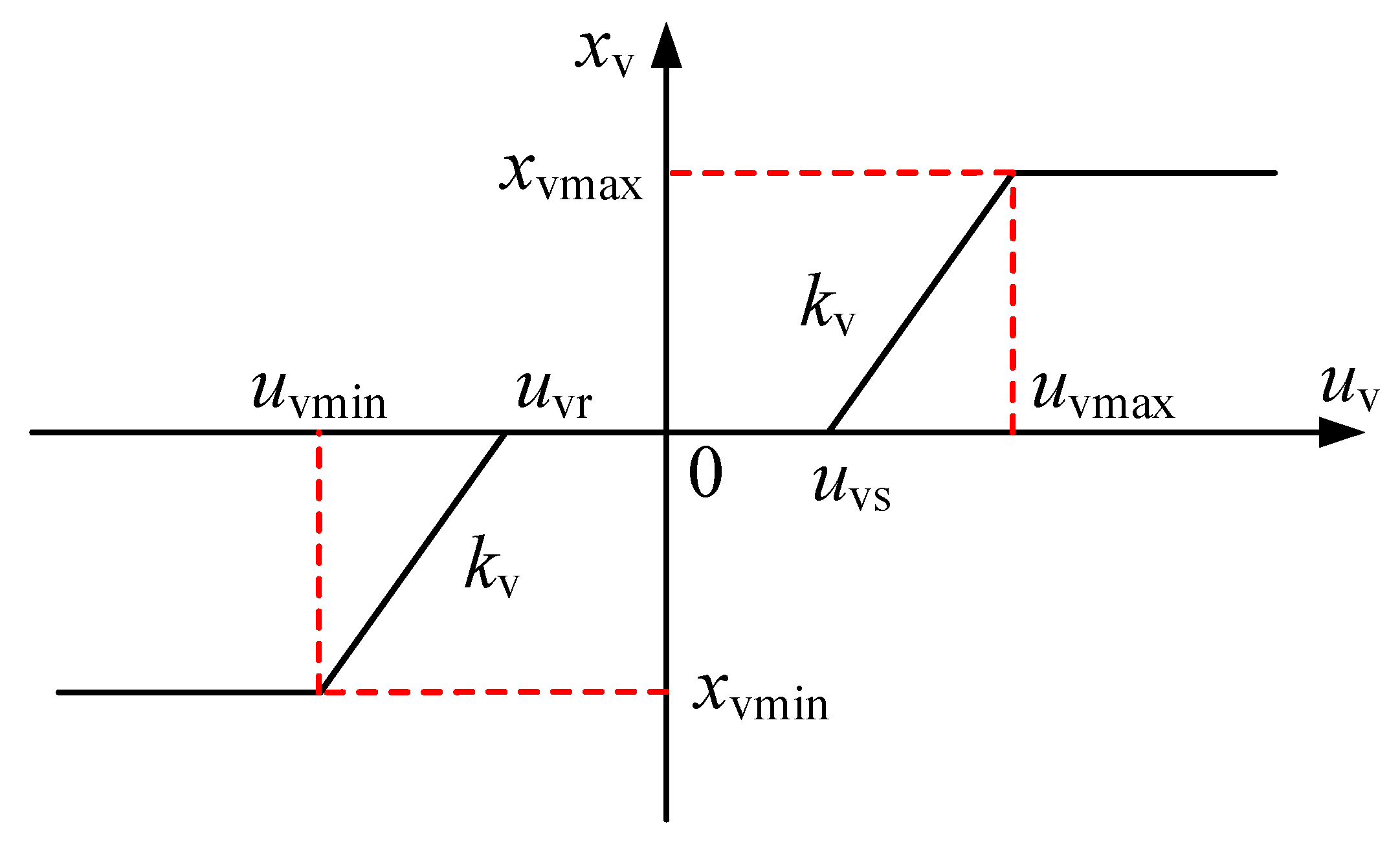
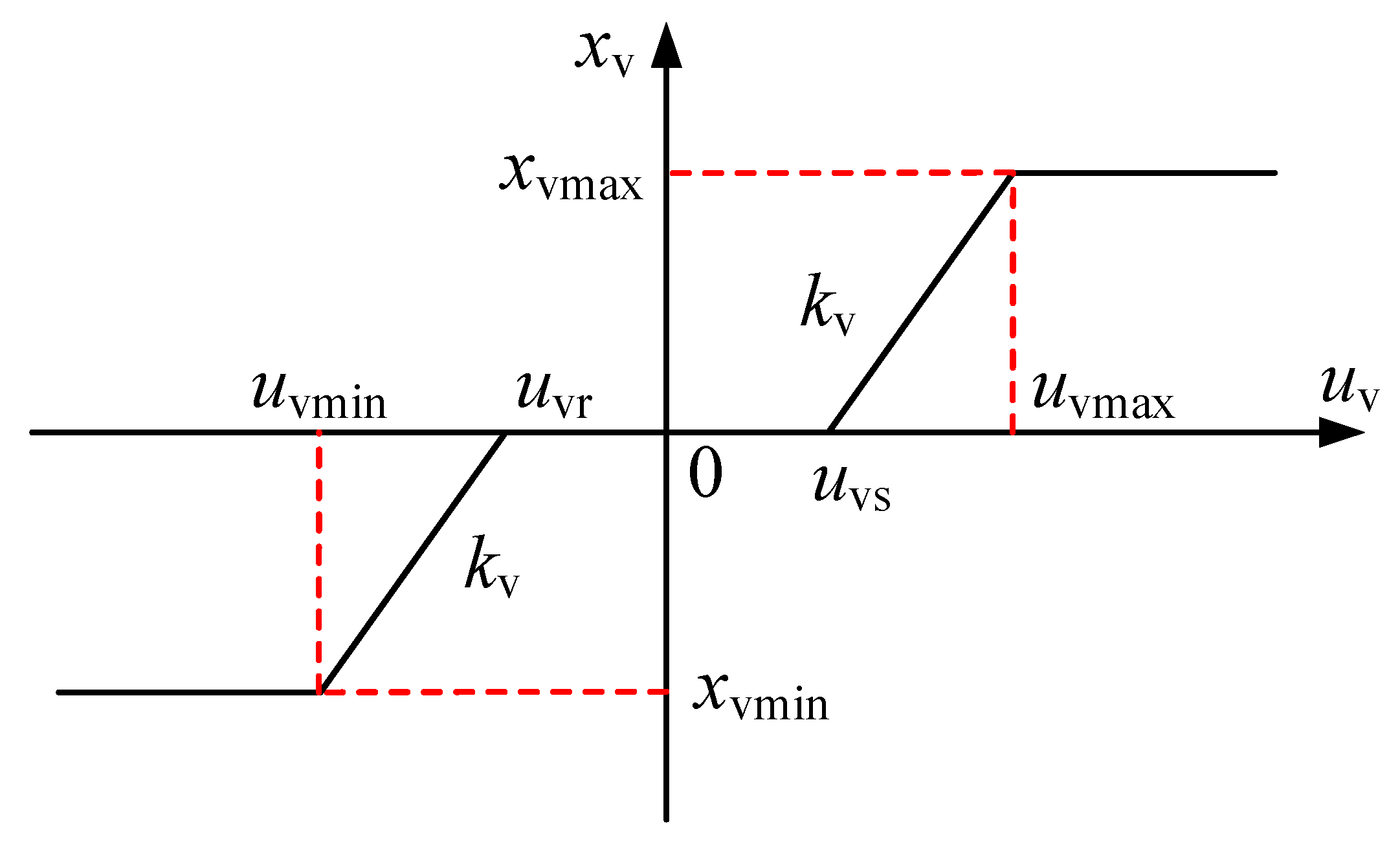
2.3. Dead-Zone Characteristics of the Proportional Directional Valve
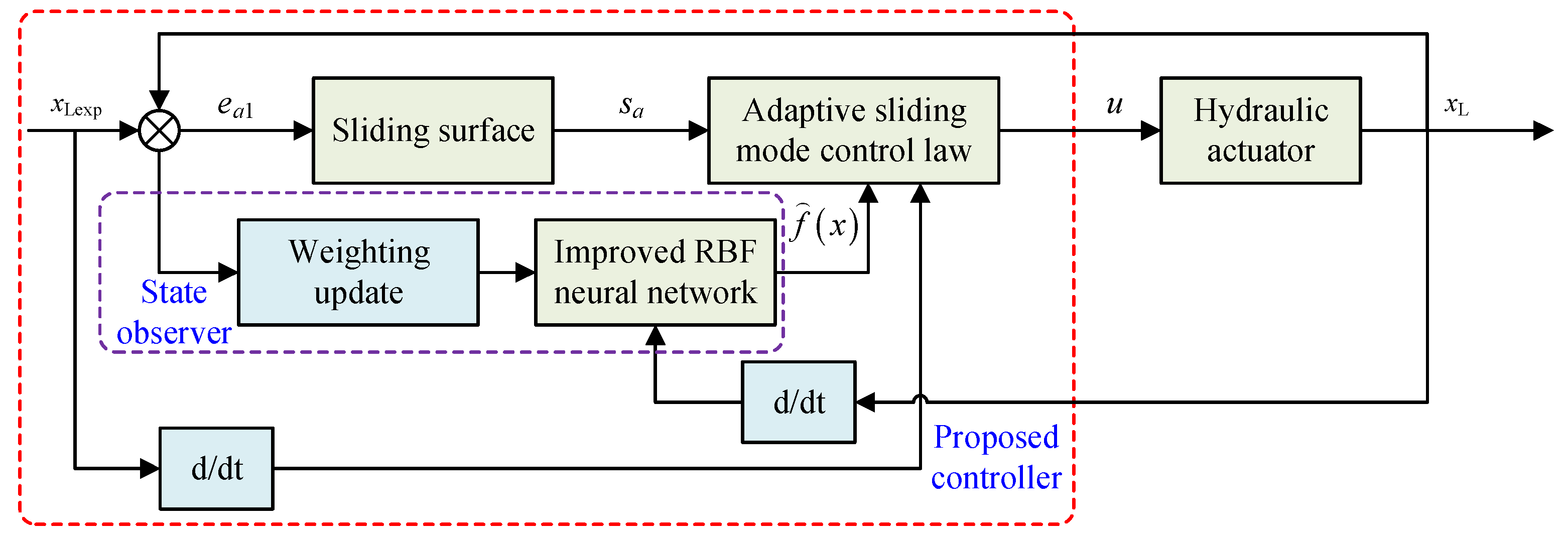
3. Design of Adaptive Sliding Mode Compensation Position-tracking Controller
3.1. Design of the State Observer Based on Improved RBF Neural Network
3.2. Design of the Conventional Sliding Mode Controller
3.3. Design of the Adaptive Sliding Mode Controller
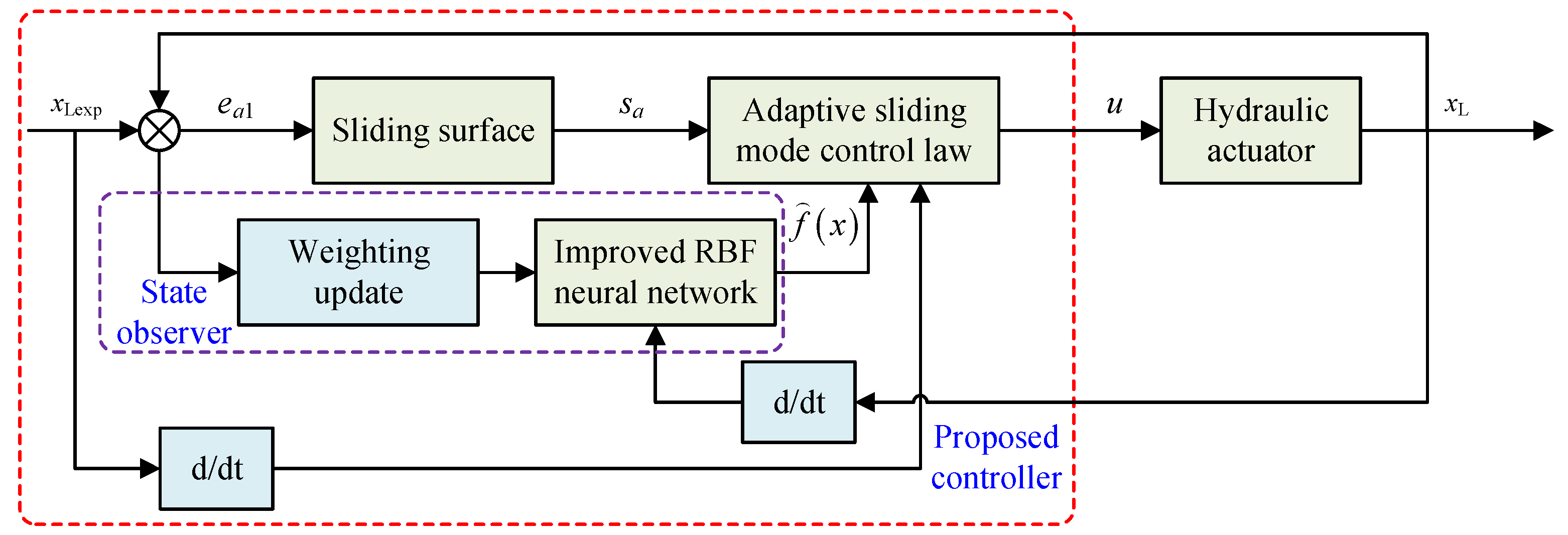
3.4. The Proposed Position-Tracking Control Strategy
4. Results and Discussion
4.1. Main Parameters
4.2. Simulation Results and Analysis
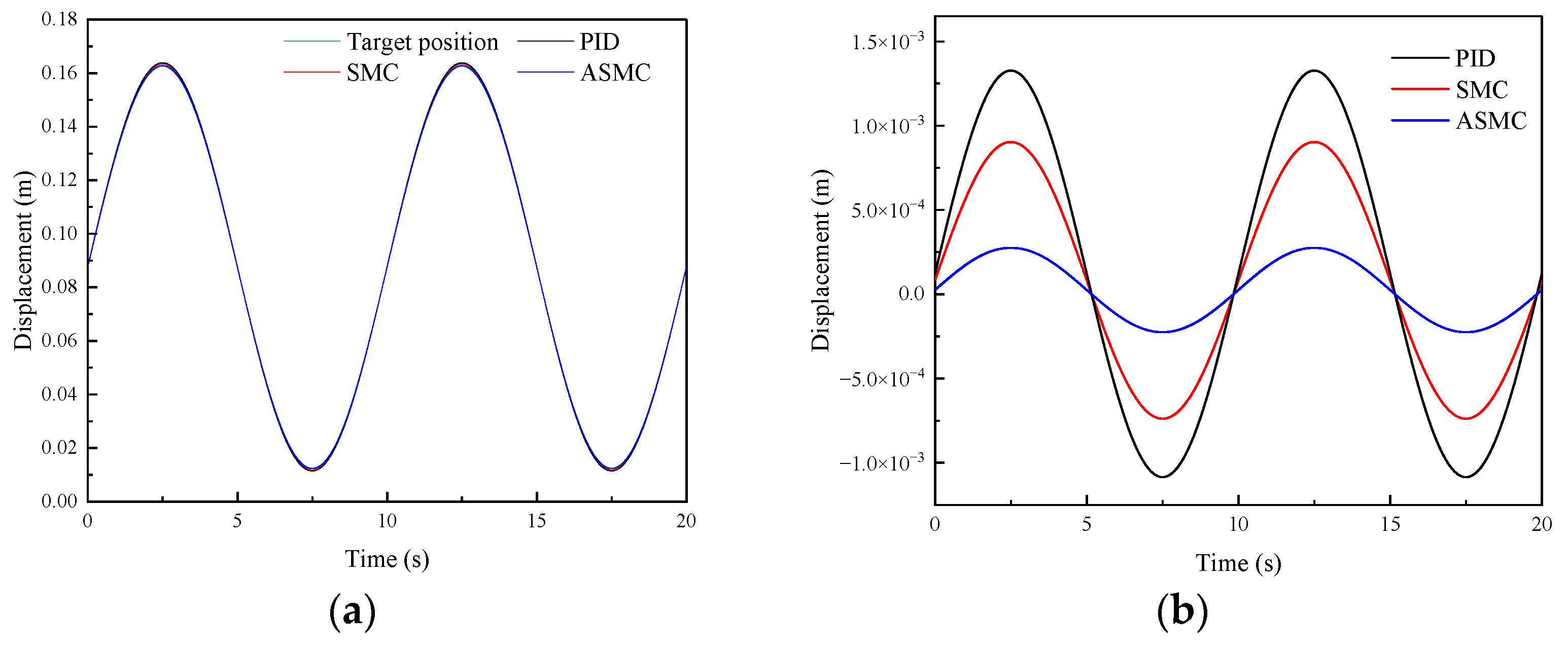
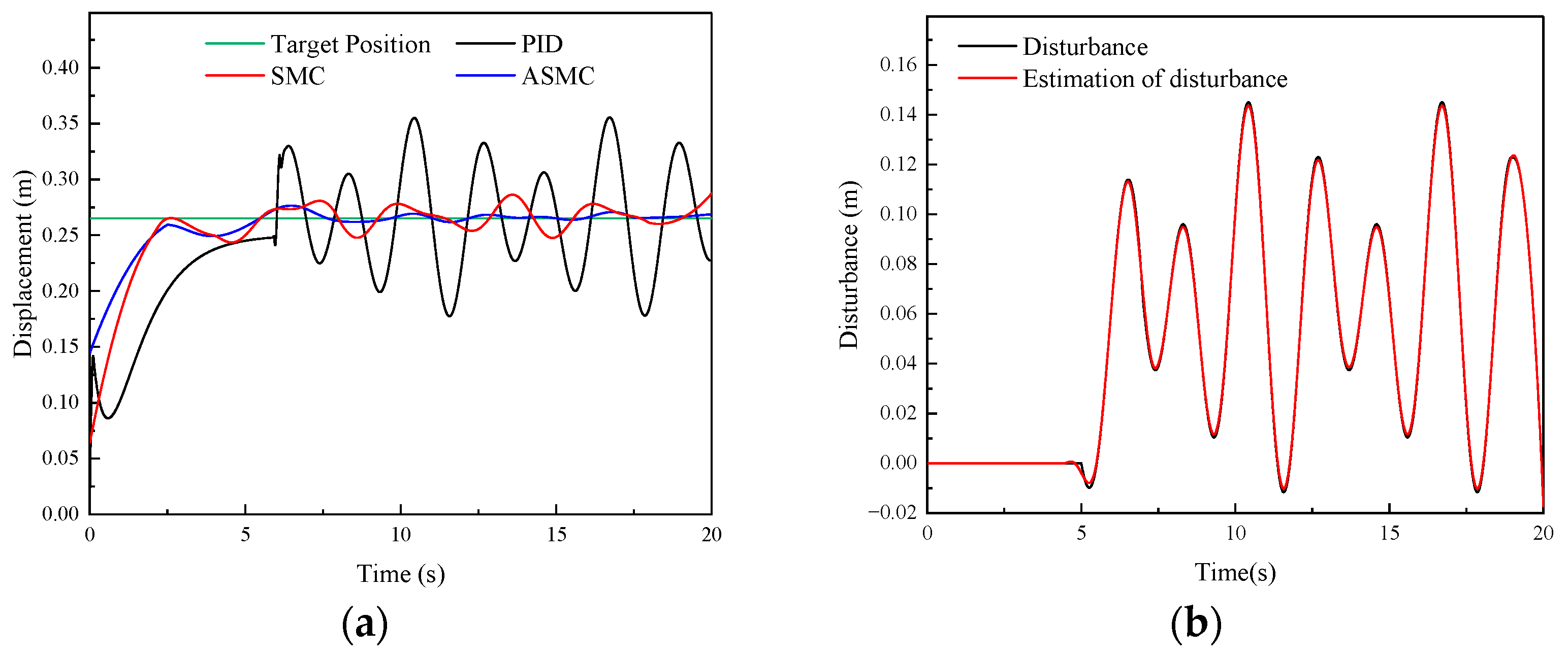
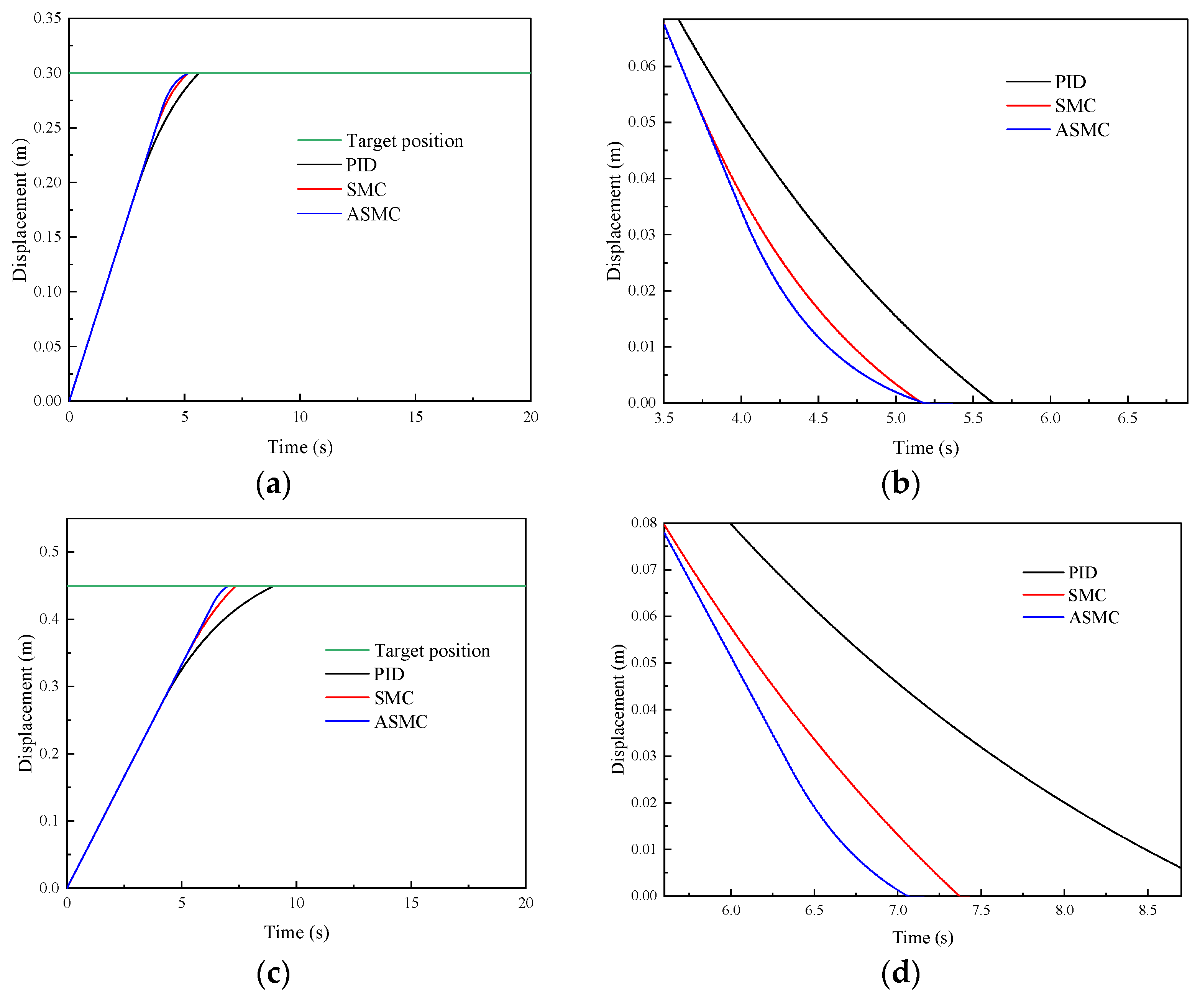
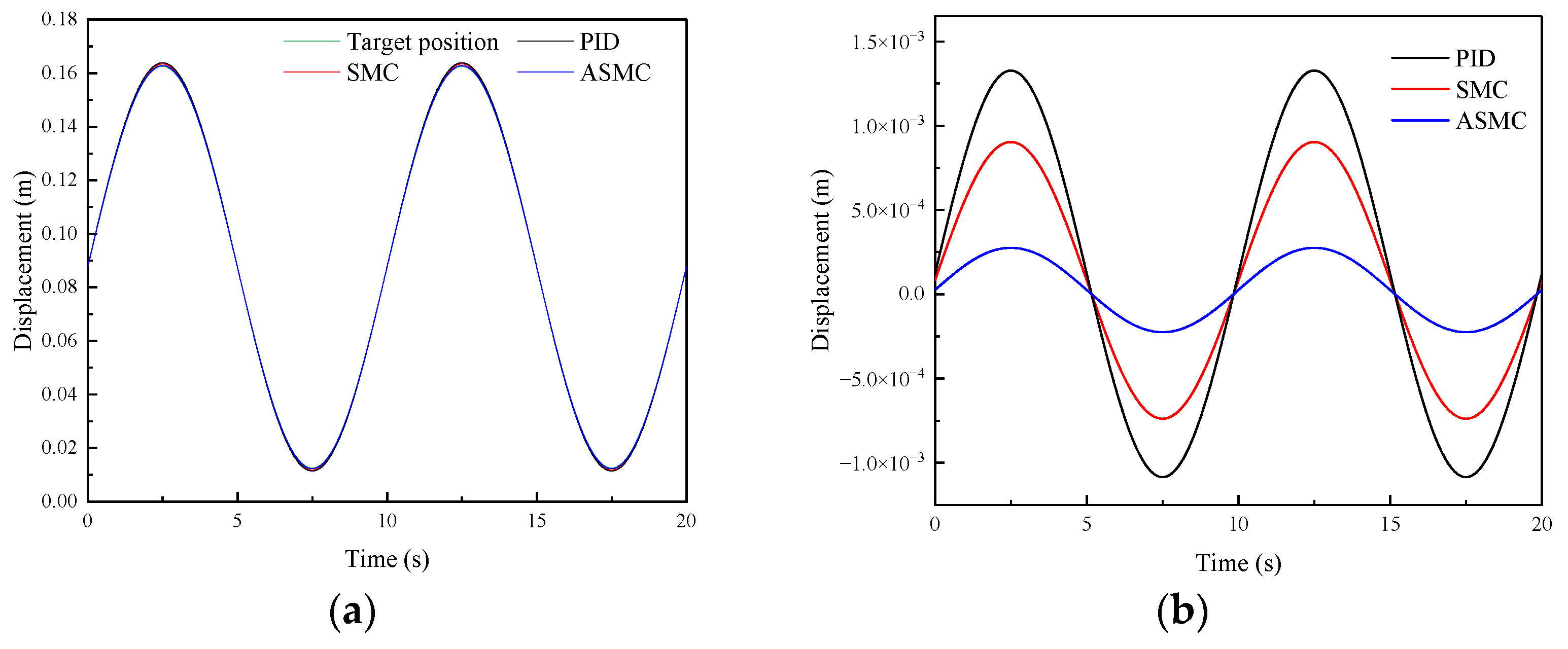
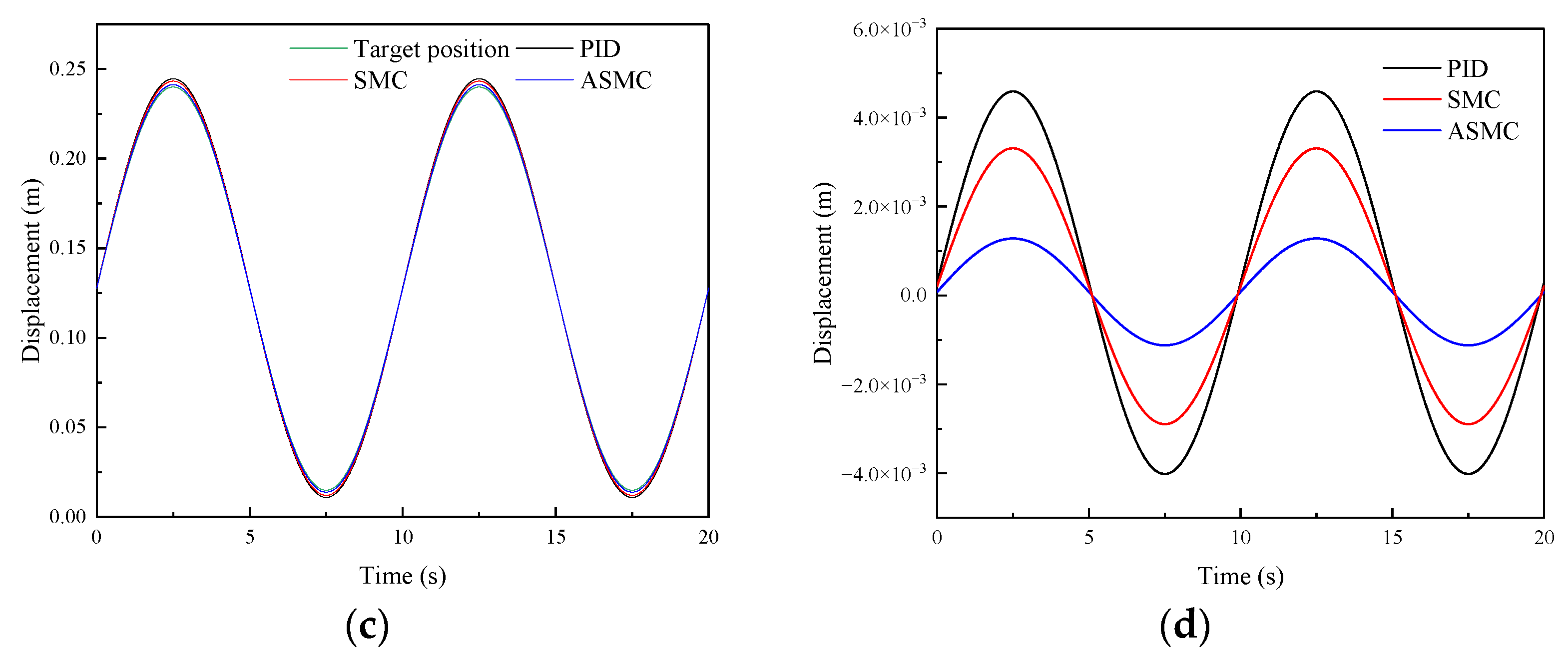
4.2.1. System Response Performance and Analysis
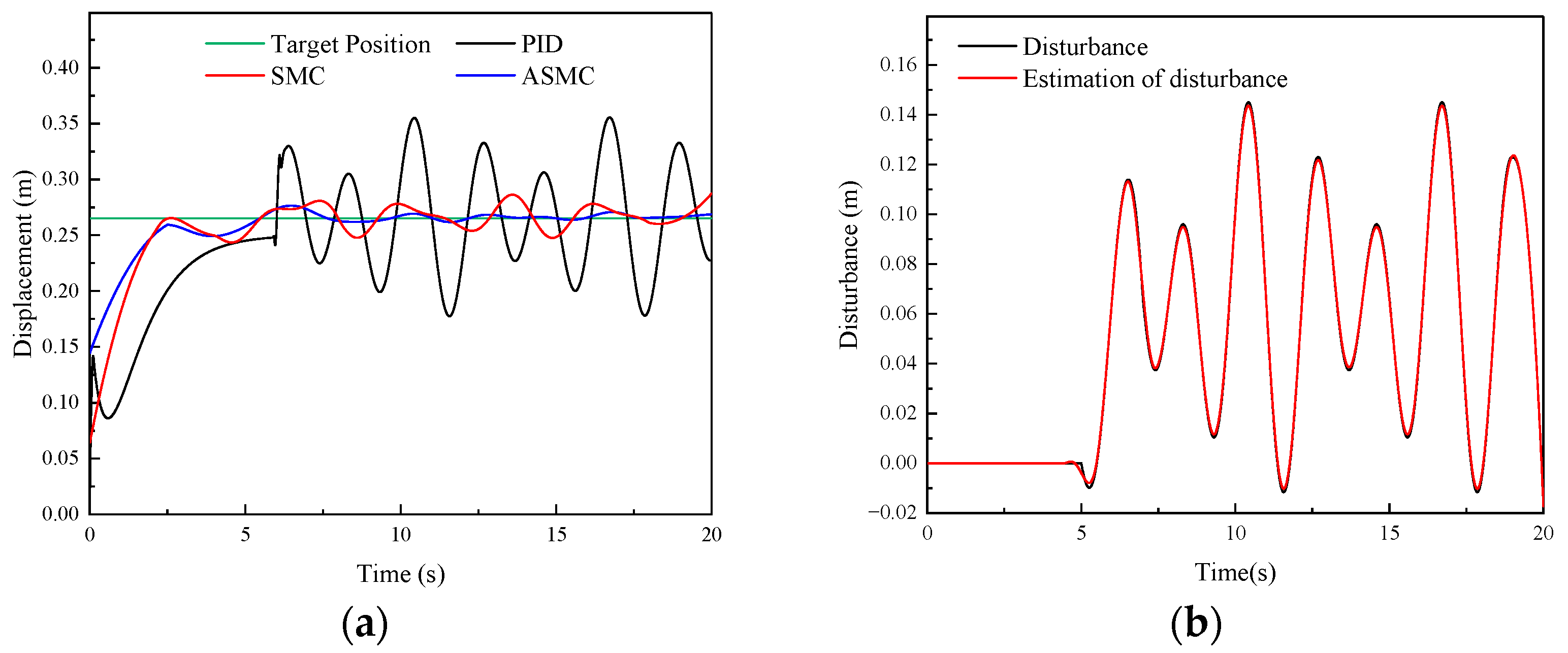
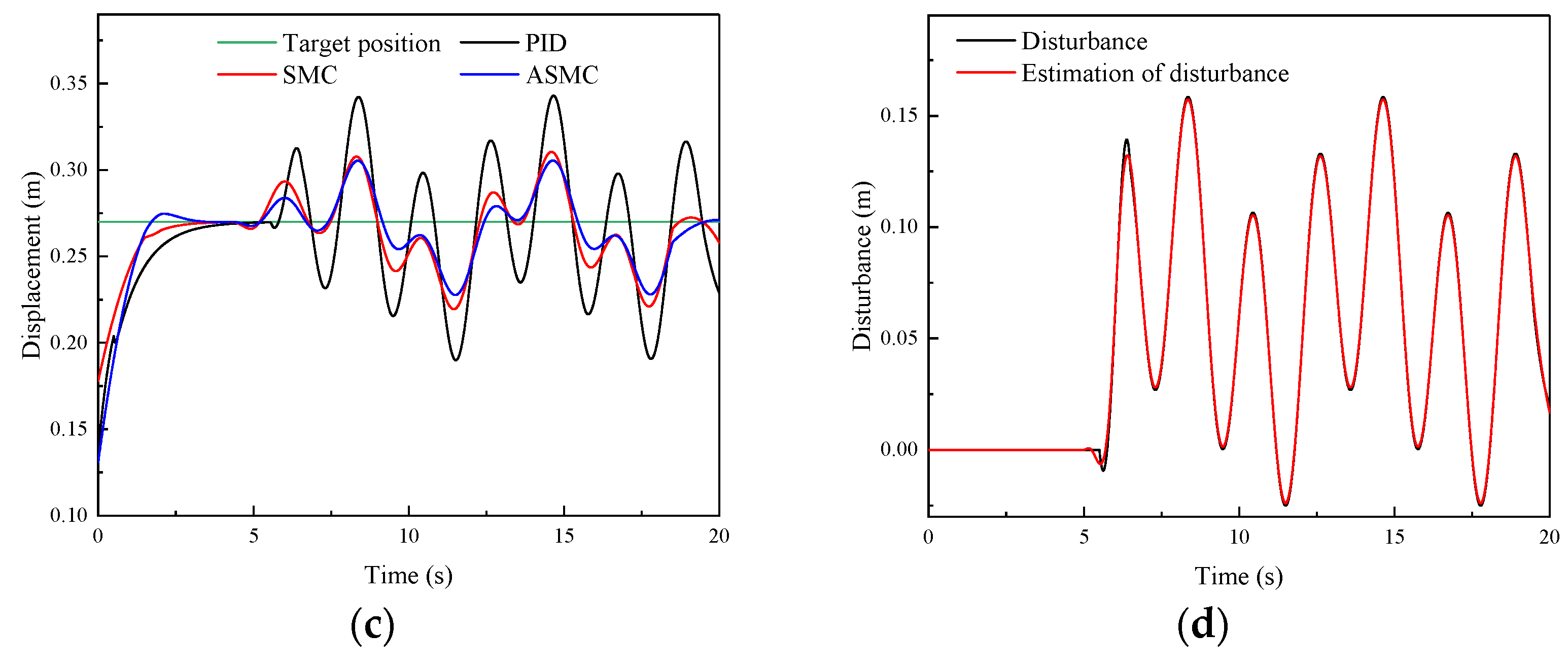
4.2.2. Model Uncertainties and Analysis
4.3. Experimental Results and Analysis
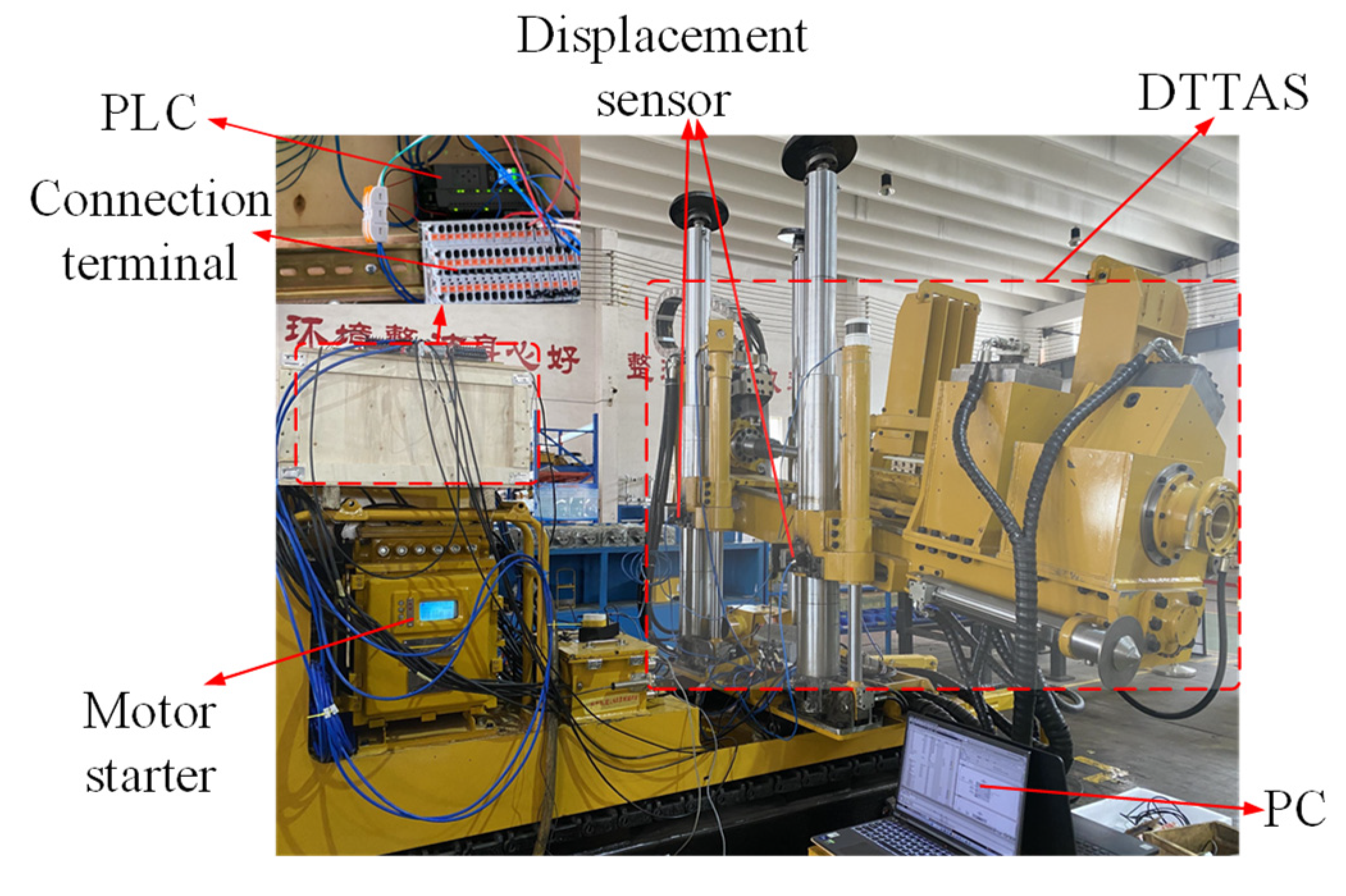
4.3.1. Experimental Platform of the DTAAS
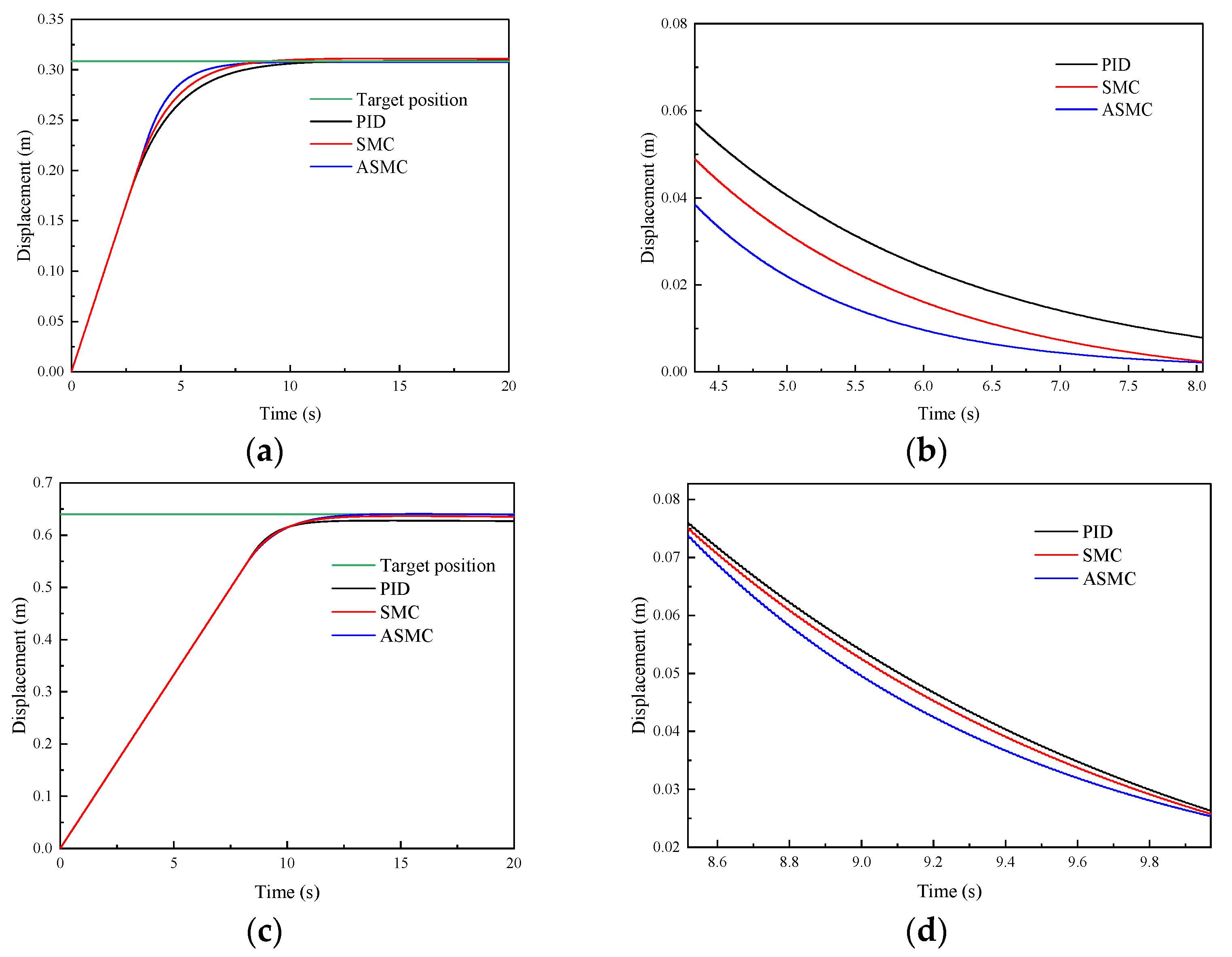
4.3.2. Position-Tracking Performance Verification
4.3.3. Anti-Disturbance Performance Verification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, S.-K.; Zhang, J.-W.; Song, Z.-X.; Fan, W.-B.; Zhang, Y.; Dong, X.-K.; Zhang, Y.-J.; Kan, B.-H.; Chen, Z.-S.; Zhang, J.-T. Review of the development status of rock burst disaster prevention system in China. J. Cent. South Univ. 2023, 30, 3763–3789. [Google Scholar] [CrossRef]
- He, X.-Q.; Zhou, C.; Song, D.-Z.; Li, Z.-L.; Cao, A.-Y.; He, S.-Q.; Khan, M. Mechanism and monitoring and early warning technology for rockburst in coal mines. Int. J. Miner. Metall. Mater. 2021, 28, 1097–1111. [Google Scholar] [CrossRef]
- Kouame, K.J.A.; Jiang, F.; Zhu, S. Research on cause of dynamic disaster of deep mining control in China and its further prevention application in Ivory Coast. Geotech. Geol. Eng. 2017, 35, 1141–1149. [Google Scholar] [CrossRef]
- Wang, Z.; Si, L.; Wang, H.; Zhang, X.; Zhao, S.; Wei, D.; Tan, C.; Yan, H. Position and attitude calculation method of anti-impact drilling robot based on spatial array inertial units. J. China Coal Soc. 2022, 47, 598–610. [Google Scholar]
- Si, L.; Wang, Z.; Li, J.; Wei, D.; Zhao, S. A novel positioning method of anti-punching drilling robot based on the fusion of multi-IMUs and visual image. ISA Trans. 2023, 137, 730–746. [Google Scholar] [CrossRef]
- Tian, J.; Guo, L.; Xiong, C.; Liu, C. Research on deviation correction characteristics of automatic vertical drilling tool. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2023, 237, 1106–1118. [Google Scholar] [CrossRef]
- Bakhshande, F.; Bach, R.; Söffker, D. Robust control of a hydraulic cylinder using an observer-based sliding mode control: Theoretical development and experimental validation. Control Eng. Pract. 2020, 95, 104272. [Google Scholar] [CrossRef]
- Yung, I.; Vázquez, C.; Freidovich, L.B. Robust position control design for a cylinder in mobile hydraulics applications. Control Eng. Pract. 2017, 69, 36–49. [Google Scholar] [CrossRef]
- Ma, T.; Guo, X.; Su, G.; Deng, H.; Yang, T. Research on Synchronous Control of Active Disturbance Rejection Position of Multiple Hydraulic Cylinders of Digging-Anchor-Support Robot. Sensors 2023, 23, 4092. [Google Scholar] [CrossRef]
- Shao, X.; Fan, Y.; Shao, J.; Sun, G. Improved active disturbance rejection control with the optimization algorithm for the leg joint control of a hydraulic quadruped robot. Meas. Control 2023, 56, 1359–1376. [Google Scholar] [CrossRef]
- Ferreira, A.; Bejarano, F.J.; Fridman, L.M. Robust control with exact uncertainties compensation: With or without chattering? IEEE Trans. Control Syst. Technol. 2010, 19, 969–975. [Google Scholar] [CrossRef]
- Shi, Q.; He, L. A model predictive control approach for electro-hydraulic braking by wire. IEEE Trans. Ind. Inform. 2022, 19, 1380–1388. [Google Scholar] [CrossRef]
- Jose, J.T.; Das, J.; Mishra, S.K. Dynamic improvement of hydraulic excavator using pressure feedback and gain scheduled model predictive control. IEEE Sens. J. 2021, 21, 18526–18534. [Google Scholar] [CrossRef]
- Feng, H.; Song, Q.; Ma, S.; Ma, W.; Yin, C.; Cao, D.; Yu, H. A new adaptive sliding mode controller based on the RBF neural network for an electro-hydraulic servo system. ISA Trans. 2022, 129, 472–484. [Google Scholar] [CrossRef]
- Dang, X.; Zhao, X.; Dang, C.; Jiang, H.; Wu, X.; Zha, L. Incomplete differentiation-based improved adaptive backstepping integral sliding mode control for position control of hydraulic system. ISA Trans. 2021, 109, 199–217. [Google Scholar] [CrossRef]
- De Loza, A.F.; Bejarano, F.J.; Fridman, L. Unmatched uncertainties compensation based on high-order sliding mode observation. Int. J. Robust Nonlinear Control 2013, 23, 754–764. [Google Scholar] [CrossRef]
- Cruz-Ancona, C.D.; Fridman, L.; Obeid, H.; Laghrouche, S.; Pérez-Pinacho, C.A. A uniform reaching phase strategy in adaptive sliding mode control. Automatica 2023, 150, 110854. [Google Scholar] [CrossRef]
- Sun, X.; Yao, J.; Deng, W. Active disturbance rejection adaptive control of multi-degrees of freedom hydraulic manipulators. Int. J. Adapt. Control Signal Process. 2022, 36, 2880–2902. [Google Scholar] [CrossRef]
- Guo, K.; Li, M.; Shi, W.; Pan, Y. Adaptive tracking control of hydraulic systems with improved parameter convergence. IEEE Trans. Ind. Electron. 2021, 69, 7140–7150. [Google Scholar] [CrossRef]
- Obeid, H.; Fridman, L.M.; Laghrouche, S.; Harmouche, M. Barrier function-based adaptive sliding mode control. Automatica 2018, 93, 540–544. [Google Scholar] [CrossRef]
- Cruz-Ancona, C.D.; Estrada, M.A.; Fridman, L. Barrier function-based adaptive Lyapunov redesign for systems without a priori bounded perturbations. IEEE Trans. Autom. Control 2021, 67, 3851–3862. [Google Scholar] [CrossRef]
- Shen, W.; Wang, J. An integral terminal sliding mode control scheme for speed control system using a double-variable hydraulic transformer. ISA Trans. 2022, 124, 386–394. [Google Scholar] [CrossRef]
- Shtessel, Y.; Plestan, F.; Edwards, C.; Levant, A. Adaptive Sliding Mode and Higher Order Sliding-Mode Control Techniques with Applications: A Survey. In Sliding-Mode Control and Variable-Structure Systems: The State of the Art; Springer: Berlin/Heidelberg, Germany, 2023; pp. 267–305. [Google Scholar]
- Du, H.; Shi, J.; Chen, J.; Zhang, Z.; Feng, X. High-gain observer-based integral sliding mode tracking control for heavy vehicle electro-hydraulic servo steering systems. Mechatronics 2021, 74, 102484. [Google Scholar] [CrossRef]
- Wan, Z.; Fu, Y.; Liu, C.; Yue, L. Sliding Mode Control Based on High Gain Observer for Electro-Hydraulic Servo System. J. Electr. Comput. Eng. 2023, 2023, 7932117. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, J.; Ding, H.; Zhang, H. Output feedback control of electro-hydraulic asymmetric cylinder system with disturbances rejection. J. Frankl. Inst. 2021, 358, 1839–1859. [Google Scholar] [CrossRef]
- Gu, J.; Xue, X.; Yang, W.; Lu, G. A hybrid sliding mode controller design for vibration suppression in a hydraulic suspension system with vertical load disturbance. J. Vib. Control 2024, 30, 377–391. [Google Scholar] [CrossRef]
- Zhao, Z.; Ahn, C.K.; Li, H.-X. Dead zone compensation and adaptive vibration control of uncertain spatial flexible riser systems. IEEE/ASME Trans. Mechatron. 2020, 25, 1398–1408. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, D.; Liu, F.; Liu, Q.; Zhang, Z. Active disturbance rejection position synchronous control of dual-hydraulic actuators with unknown dead-zones. Sensors 2020, 20, 6124. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J.; Ma, D. Robust adaptive precision motion control of hydraulic actuators with valve dead-zone compensation. ISA Trans. 2017, 70, 269–278. [Google Scholar] [CrossRef]
- Zhang, T.; Lin, M.; Xia, X.; Yi, Y. Adaptive cooperative dynamic surface control of non-strict feedback multi-agent systems with input dead-zones and actuator failures. Neurocomputing 2021, 442, 48–63. [Google Scholar] [CrossRef]
- Zhou, X.; Gao, C.; Li, Z.-G.; Ouyang, X.-Y.; Wu, L.-B. Observer-based adaptive fuzzy finite-time prescribed performance tracking control for strict-feedback systems with input dead-zone and saturation. Nonlinear Dyn. 2021, 103, 1645–1661. [Google Scholar] [CrossRef]
- Truong, H.V.A.; Nam, S.; Kim, S.; Kim, Y.; Chung, W.K. Backstepping-Sliding-Mode-Based Neural Network Control for Electro-Hydraulic Actuator Subject to Completely Unknown System Dynamics. IEEE Trans. Autom. Sci. Eng. 2023, 1–15. [Google Scholar] [CrossRef]
- Palli, G.; Strano, S.; Terzo, M. A novel adaptive-gain technique for high-order sliding-mode observers with application to electro-hydraulic systems. Mech. Syst. Signal Process. 2020, 144, 106875. [Google Scholar] [CrossRef]
- Yao, Z.; Liang, X.; Zhao, Q.; Yao, J. Adaptive disturbance observer-based control of hydraulic systems with asymptotic stability. Appl. Math. Model. 2022, 105, 226–242. [Google Scholar] [CrossRef]
- Razmjooei, H.; Palli, G.; Nazari, M. Disturbance observer-based nonlinear feedback control for position tracking of electro-hydraulic systems in a finite time. Eur. J. Control 2022, 67, 100659. [Google Scholar] [CrossRef]
- Zhang, Z.; Guo, Y.; Gong, D.; Zhu, S. Hybrid extended state observer-based integral sliding mode control of the propulsion for a hydraulic roofbolter. Control Eng. Pract. 2022, 126, 105260. [Google Scholar] [CrossRef]
- Zang, W.; Zhang, Q.; Shen, G.; Fu, Y. Extended sliding mode observer based robust adaptive backstepping controller for electro-hydraulic servo system: Theory and experiment. Mechatronics 2022, 85, 102841. [Google Scholar] [CrossRef]
- Yang, X.; Yao, J.; Deng, W. Output feedback adaptive super-twisting sliding mode control of hydraulic systems with disturbance compensation. ISA Trans. 2021, 109, 175–185. [Google Scholar] [CrossRef]
- Gomez, M.A.; Cruz-Ancona, C.D. Closing the gap from nominal to robust asymptotic stabilization of time delay systems. Int. J. Robust Nonlinear Control 2024, 1–15. [Google Scholar] [CrossRef]
- Lu, J.; Zhang, D.; Huang, G.; Li, X.; Gao, H.; Yin, G. Effects of loading rate on the compound dynamic disaster in deep underground coal mine under true triaxial stress. Int. J. Rock Mech. Min. Sci. 2020, 134, 104453. [Google Scholar] [CrossRef]
- Gu, J.; Shen, C.; Zhang, C.; Wu, H.; Wei, D.; Si, L.; Wang, Z. Electrohydraulic proportional position and pressure loading control utilizing a state perception and processing method. ISA Trans. 2023, 143, 647–665. [Google Scholar] [CrossRef]
- He, Y.; Wang, J.; Hao, R. Adaptive robust dead-zone compensation control of electro-hydraulic servo systems with load disturbance rejection. J. Syst. Sci. Complex. 2015, 28, 341–359. [Google Scholar] [CrossRef]
- Milbradt, D.M.C.; de Oliveira Evald, P.J.D.; Hollweg, G.V.; Gründling, H.A. A hybrid robust adaptive sliding mode controller for partially modelled systems: Discrete-time lyapunov stability analysis and application. Nonlinear Anal. Hybrid Syst. 2023, 48, 101333. [Google Scholar] [CrossRef]
- Hollweg, G.V.; Dias de Oliveira Evald, P.J.; Milbradt, D.M.C.; Tambara, R.V.; Gründling, H.A. Lyapunov stability analysis of discrete-time robust adaptive super-twisting sliding mode controller. Int. J. Control 2023, 96, 614–627. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Characteristics | Values |
|---|---|---|
| Csv | Throttling coefficient | 0.65 |
| Cip | Internal leakage coefficient | 8.2 × 10−5 m3/(s∙MPa) |
| Kqv | Flow gain | 1.5 × 10−10 m3/(s∙MPa) |
| Kcv | Flow-pressure gain | 4.6 × 10−5 m3/(s∙MPa) |
| xL | Maximum stroke | 0.8 m |
| ρ | Hydraulic oil density | 900 kg/m3 |
| βe | bulk modulus | 1.7 × 109 Pa |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, J.; Wang, X.; Yan, H.; Tan, C.; Si, L.; Wang, Z. Observer-Based Adaptive Sliding Mode Compensation Position-Tracking Control for Drilling Tool Attitude Adjustment. Sensors 2024, 24, 2404. https://doi.org/10.3390/s24082404
Gu J, Wang X, Yan H, Tan C, Si L, Wang Z. Observer-Based Adaptive Sliding Mode Compensation Position-Tracking Control for Drilling Tool Attitude Adjustment. Sensors. 2024; 24(8):2404. https://doi.org/10.3390/s24082404
Chicago/Turabian StyleGu, Jinheng, Xunqi Wang, Haifeng Yan, Chao Tan, Lei Si, and Zhongbin Wang. 2024. "Observer-Based Adaptive Sliding Mode Compensation Position-Tracking Control for Drilling Tool Attitude Adjustment" Sensors 24, no. 8: 2404. https://doi.org/10.3390/s24082404