
Reduction in the Sensor Effect on Acoustic Emission Data to Create a Generalizable Library by Data Merging

Abstract
:1. Introduction
2. Experimental Setup and AE Data Post-Processing
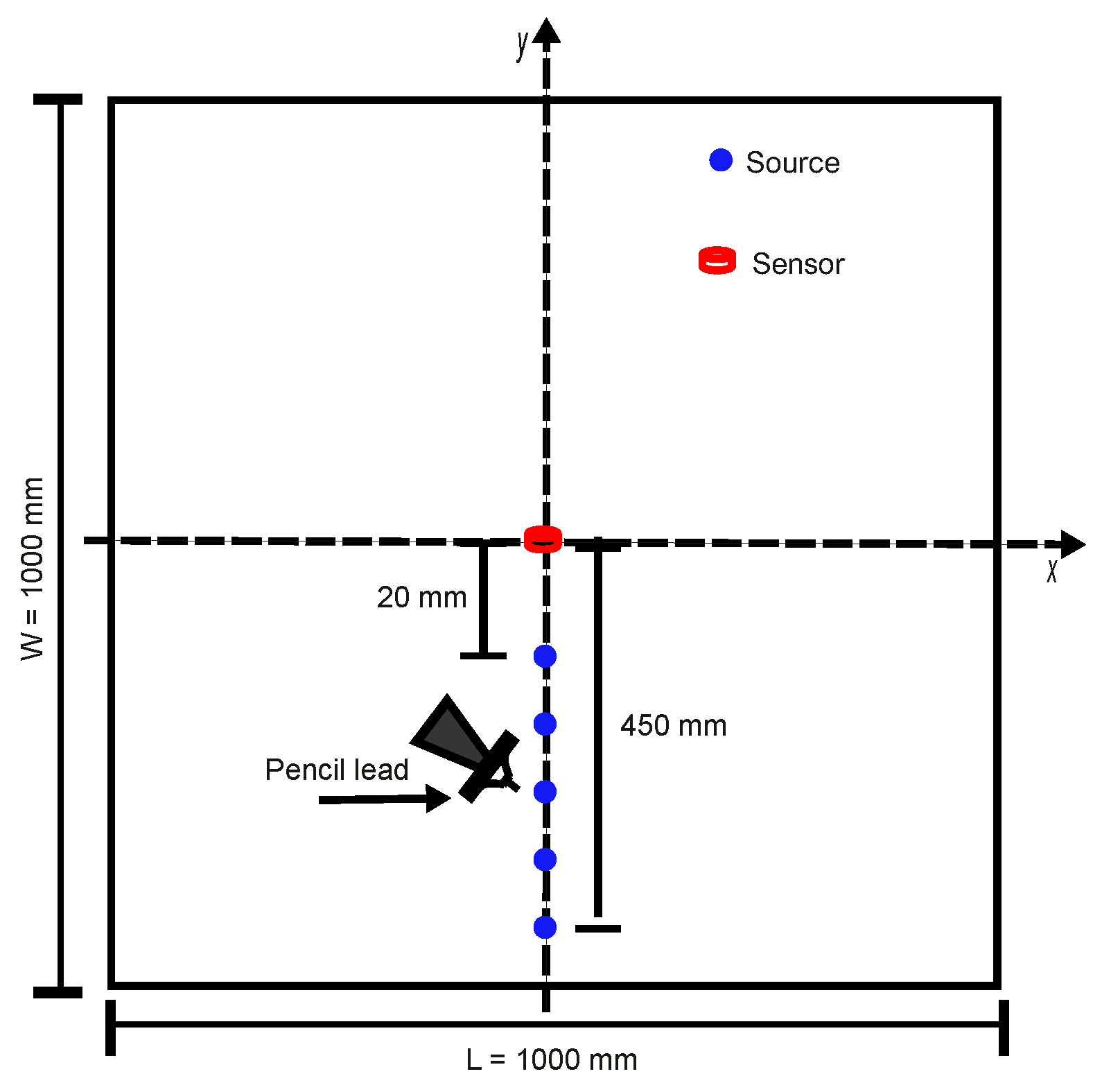
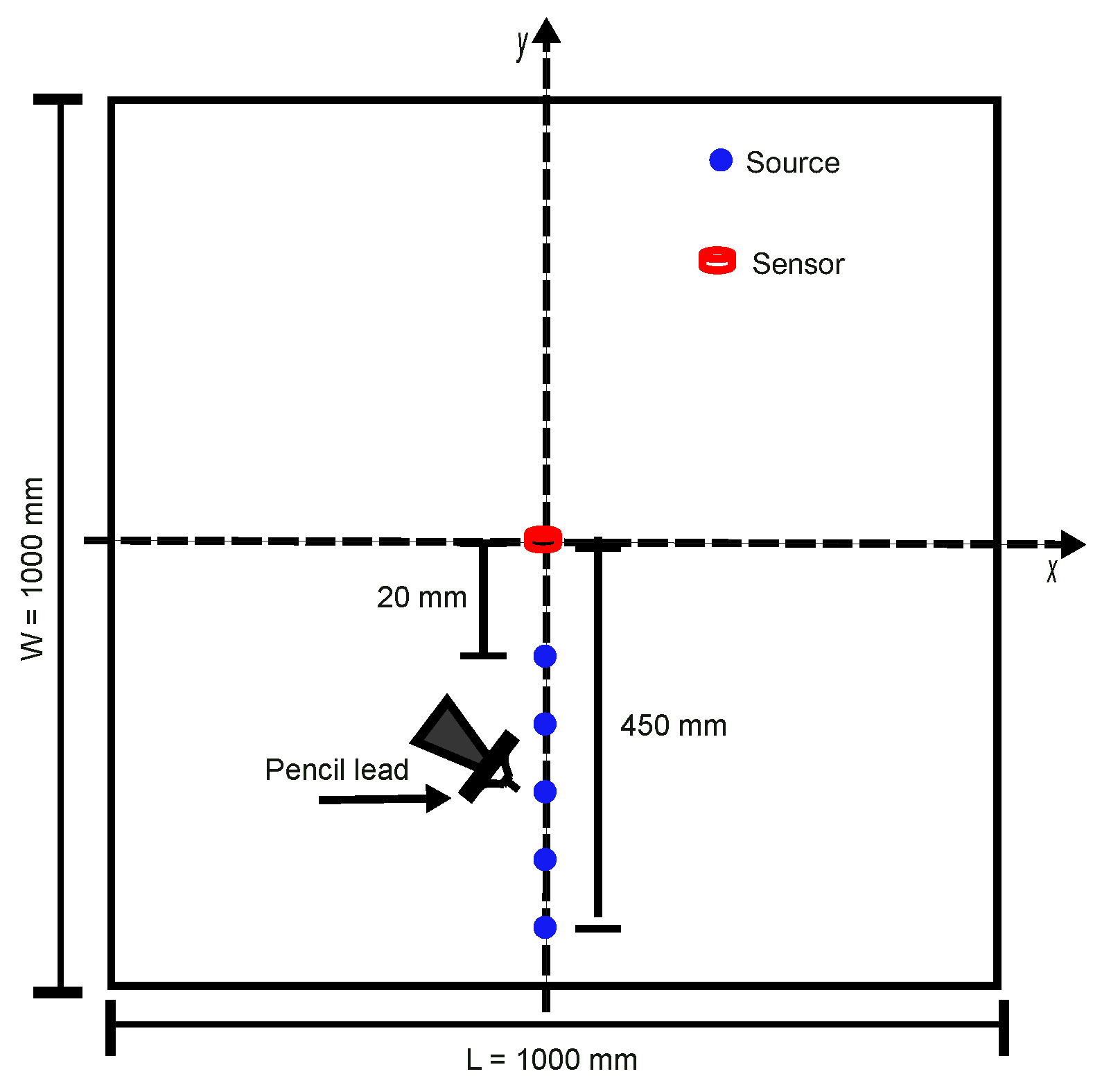
2.1. Experimental Setup
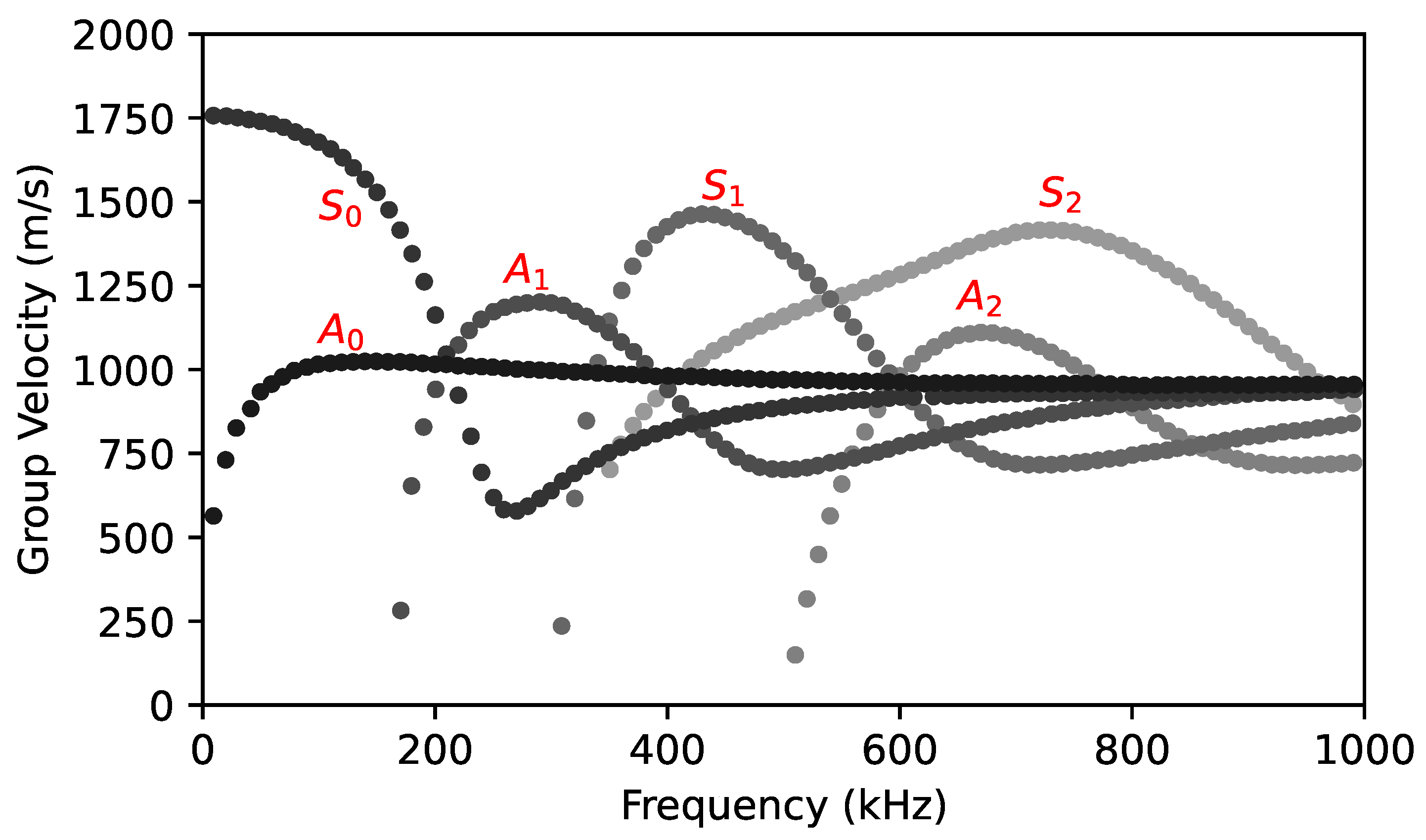
2.2. Excited Waves
2.3. Dataset Description and Data Post-Processing
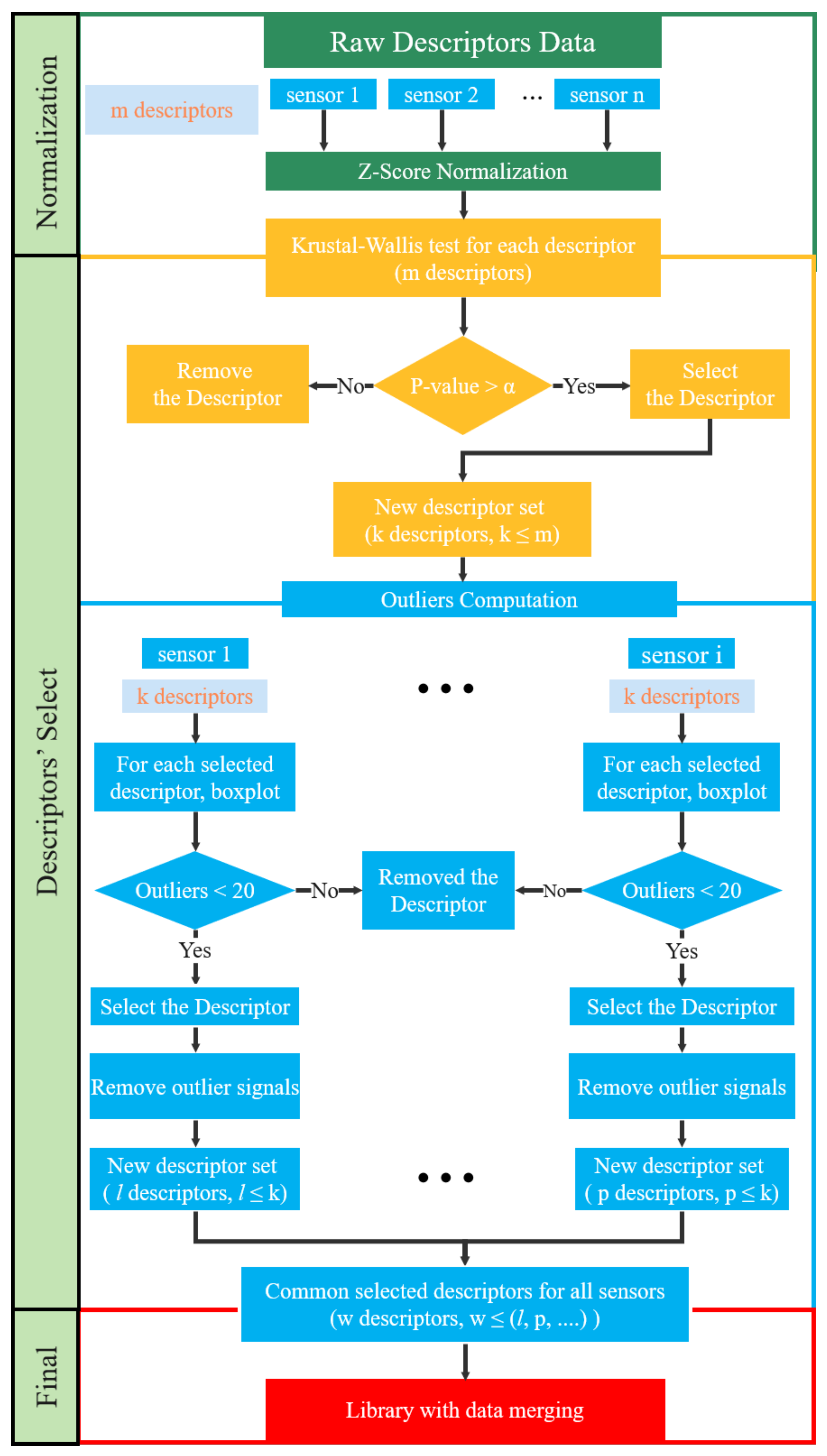
2.4. Procedure to Reduce Sensor Effect towards Common Set of Descriptors
- (1)
- Raw descriptor sets are normalized;
- (2)
- The Kruskal–Wallis (KW) test is applied to normalized descriptors to evaluate the normalization method and whether descriptors come from the same distribution;
- (3)
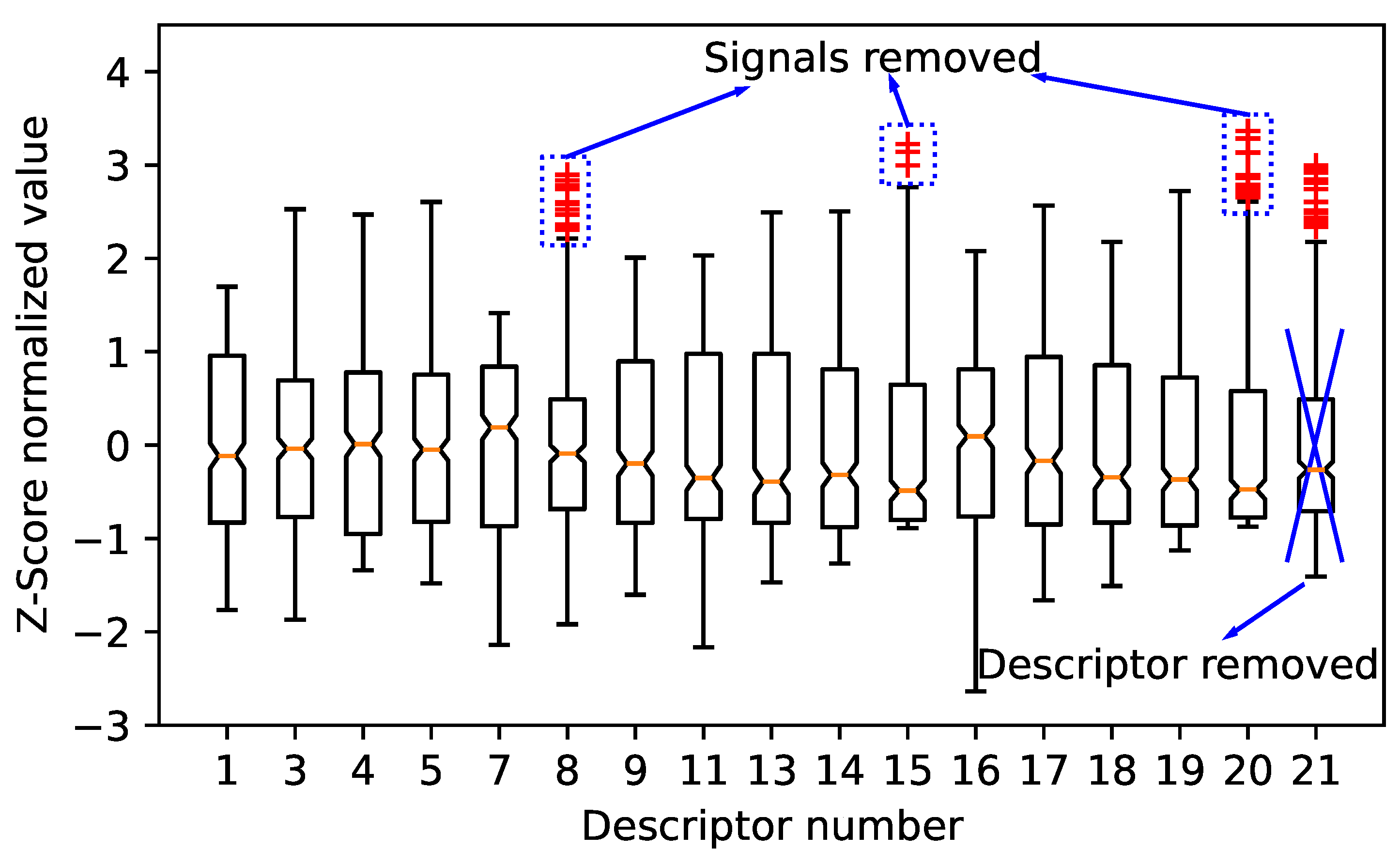
- Descriptors with too many outliers are removed and, for the other descriptors, the signal outliers are removed from the dataset;
- (4)
- Principal component analysis (PCA) is applied to the remaining normalized descriptors and datasets.
2.4.1. Normalization
2.4.2. Kruskal–Wallis Test
2.4.3. Outliers
2.4.4. Principal Component Analysis
3. Results and Discussion
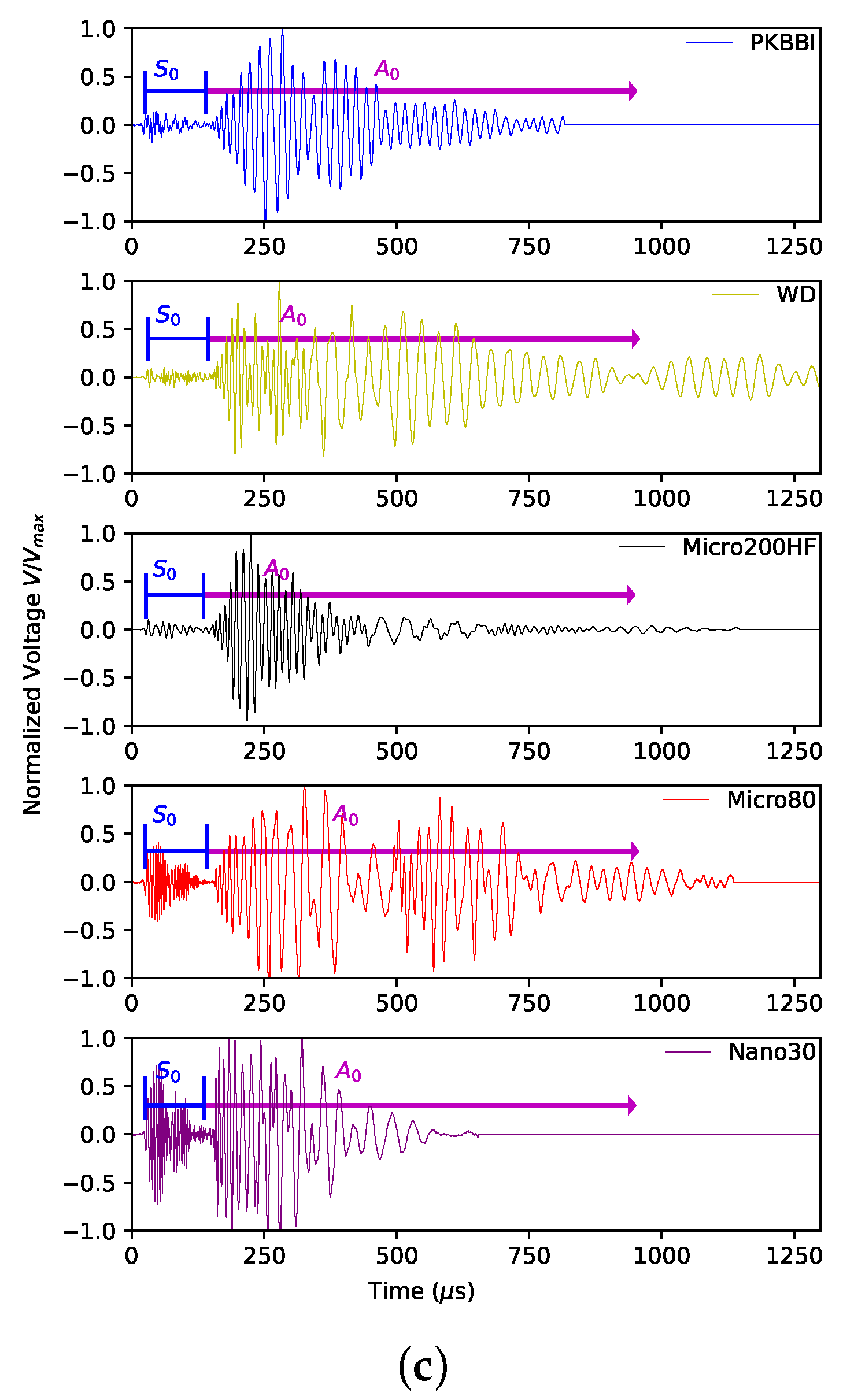
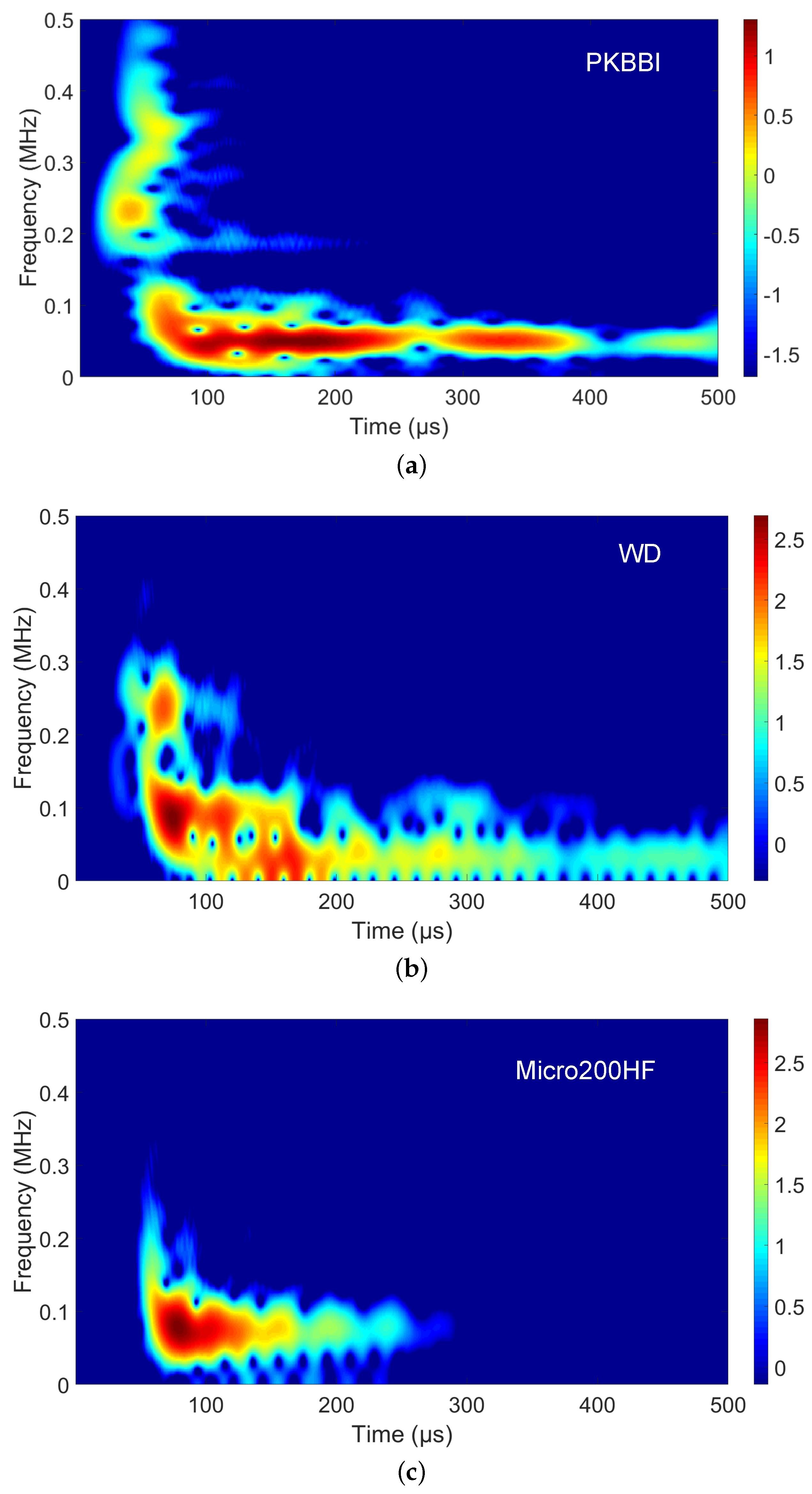
3.1. Sensor Effect on the Waveform
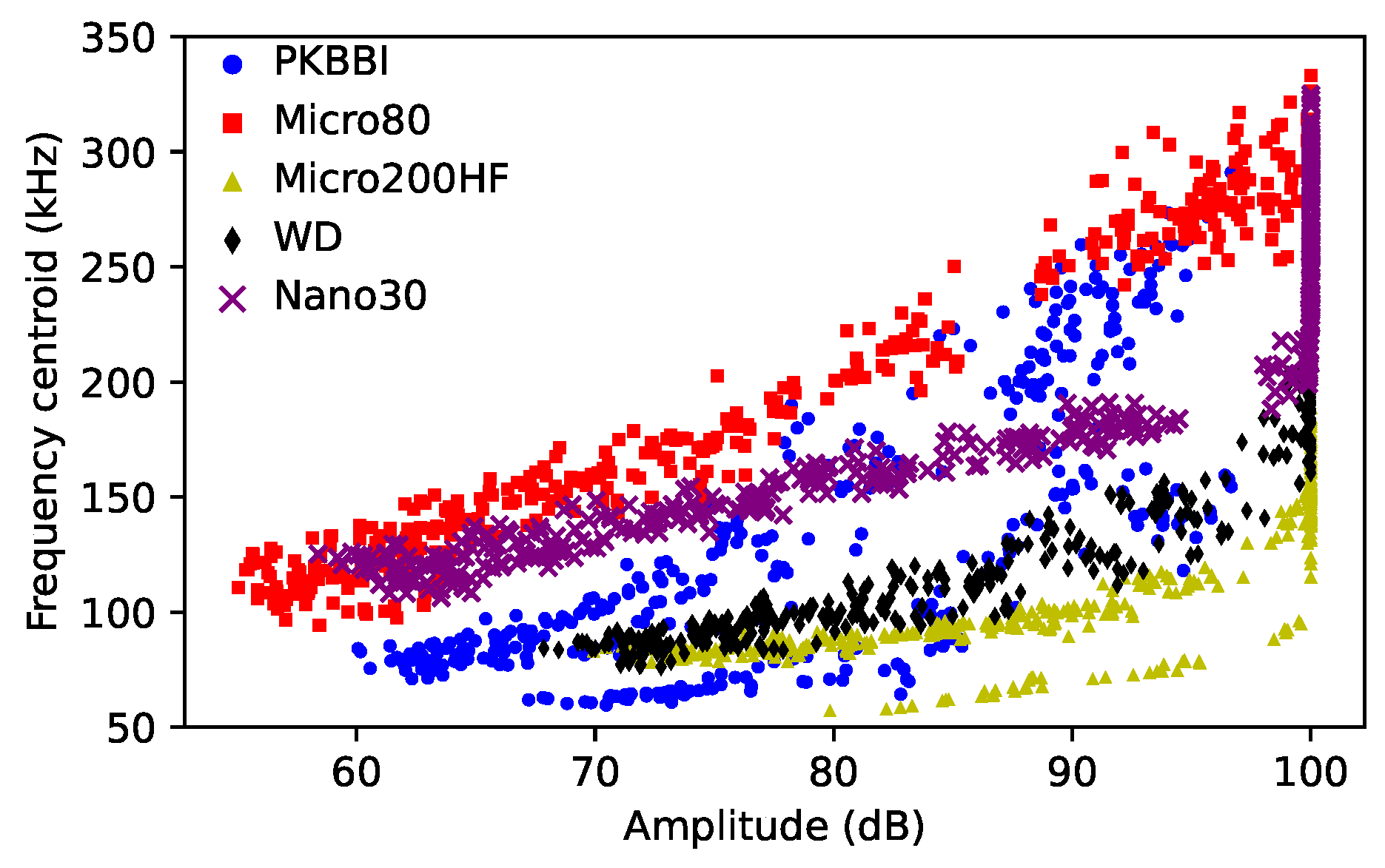
3.2. Sensor Effect on Descriptors
- (a)
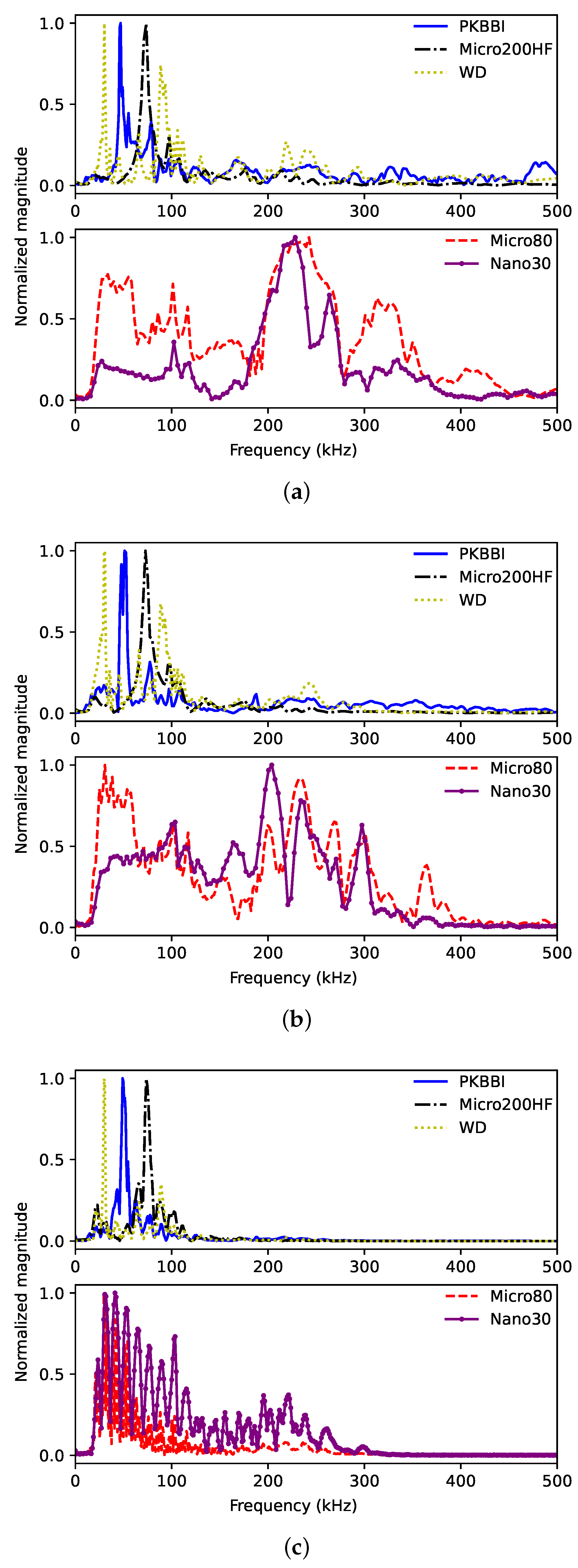
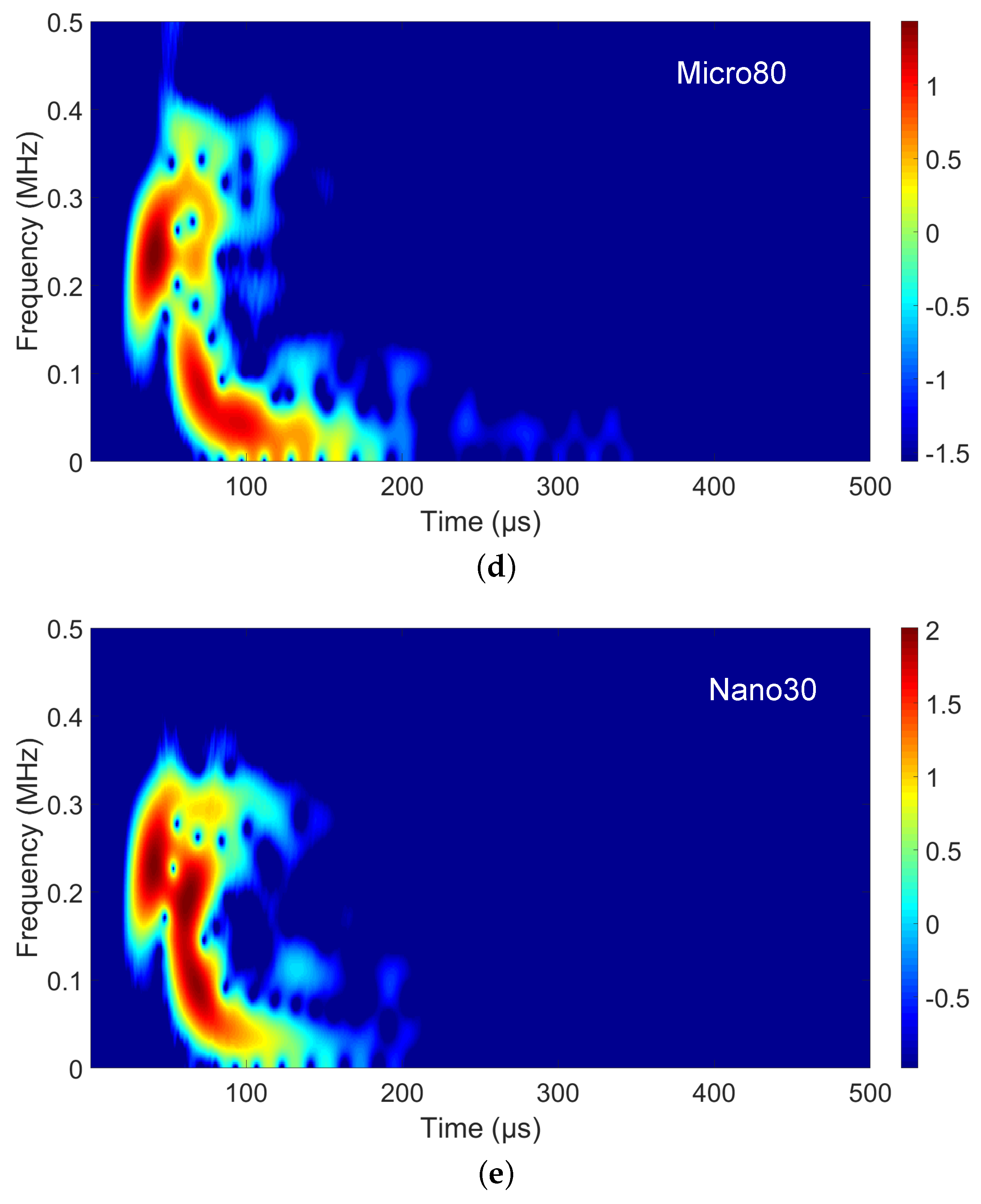
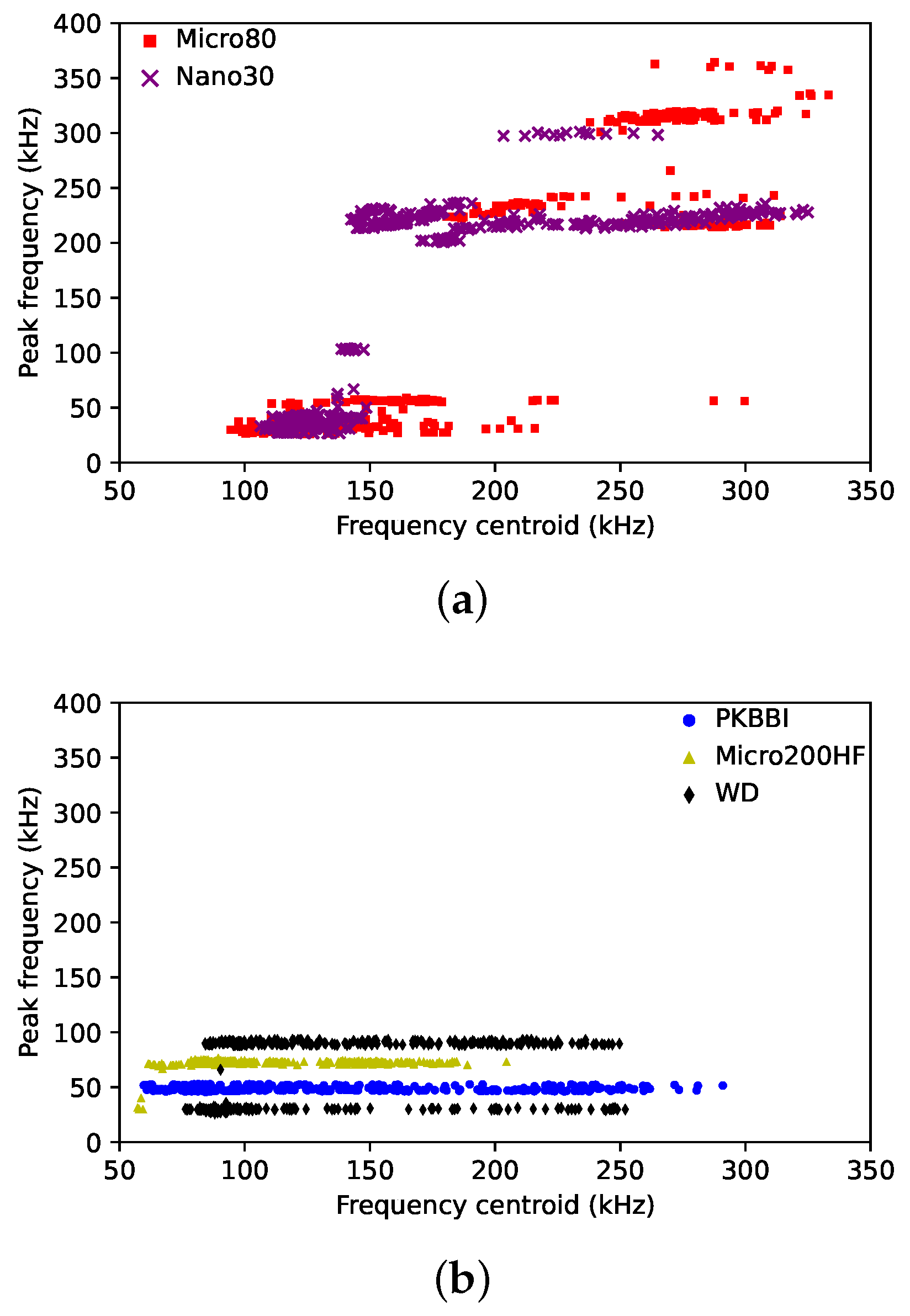
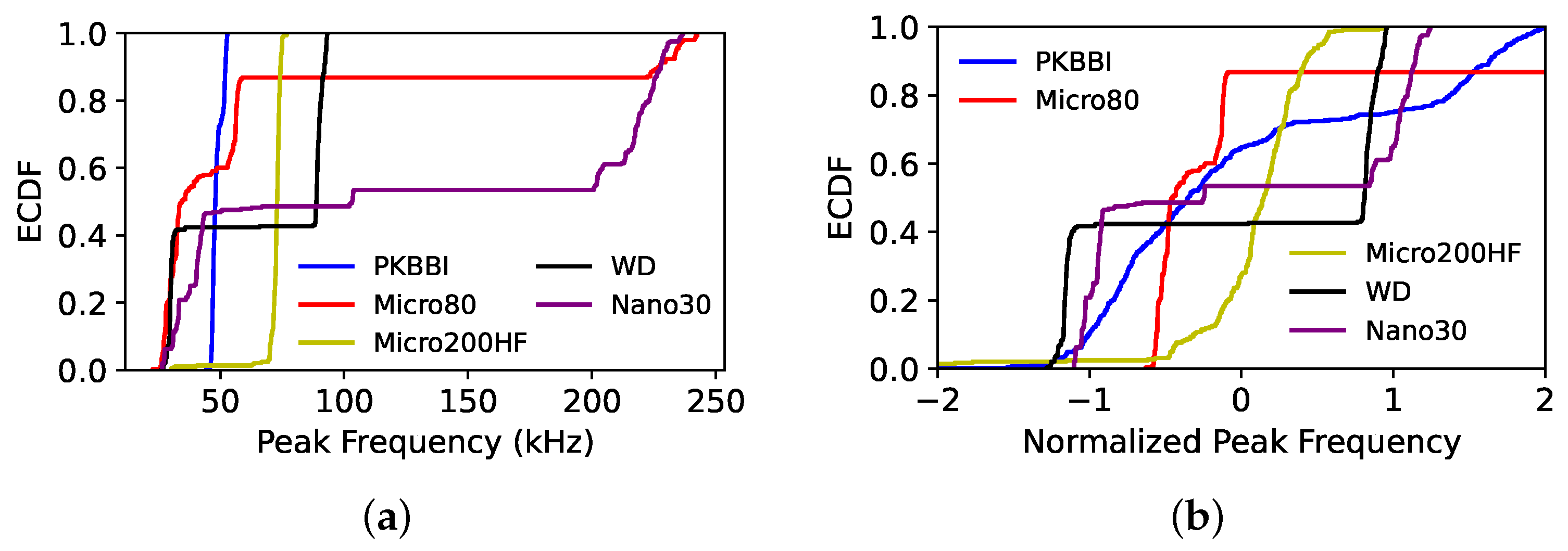
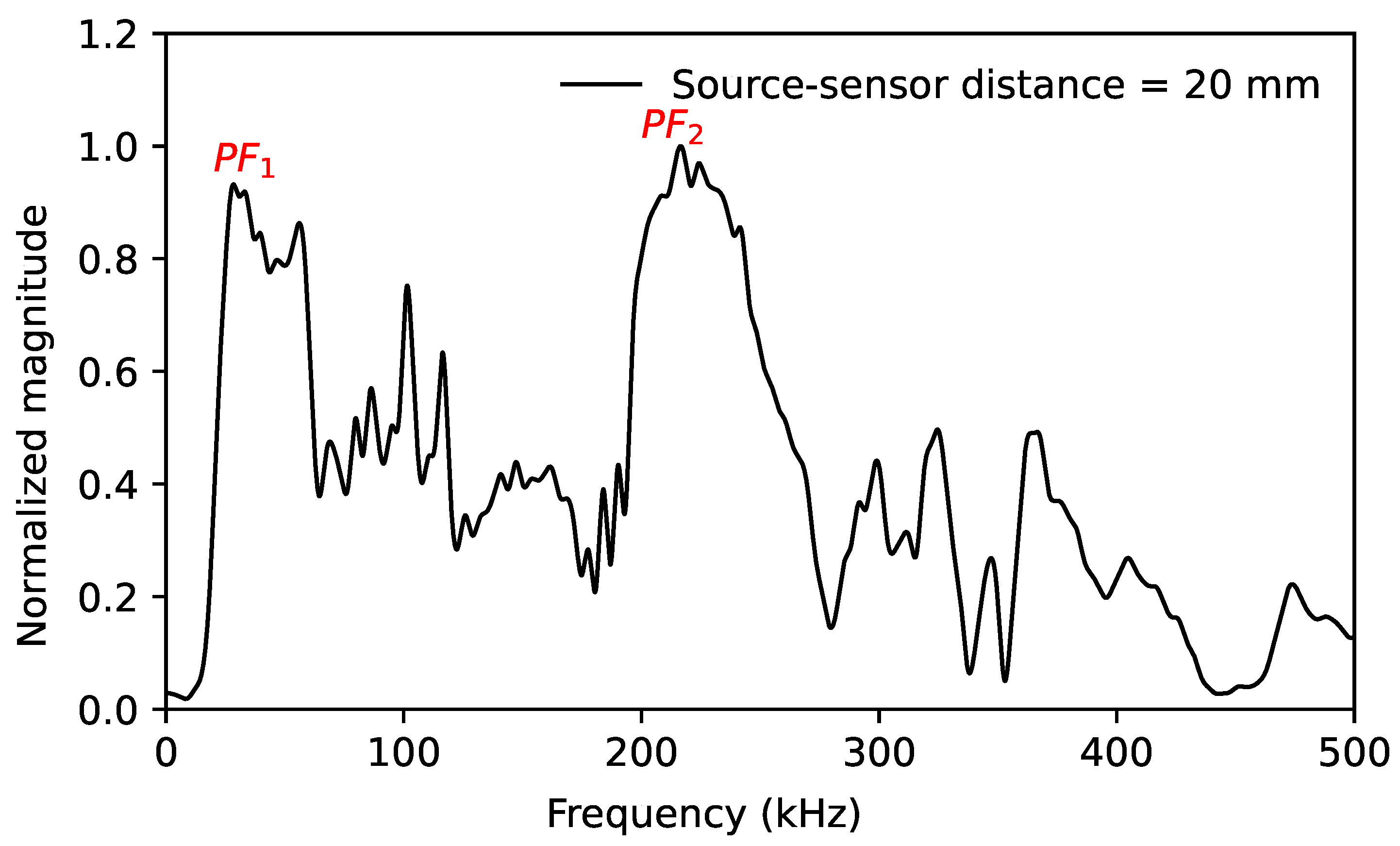
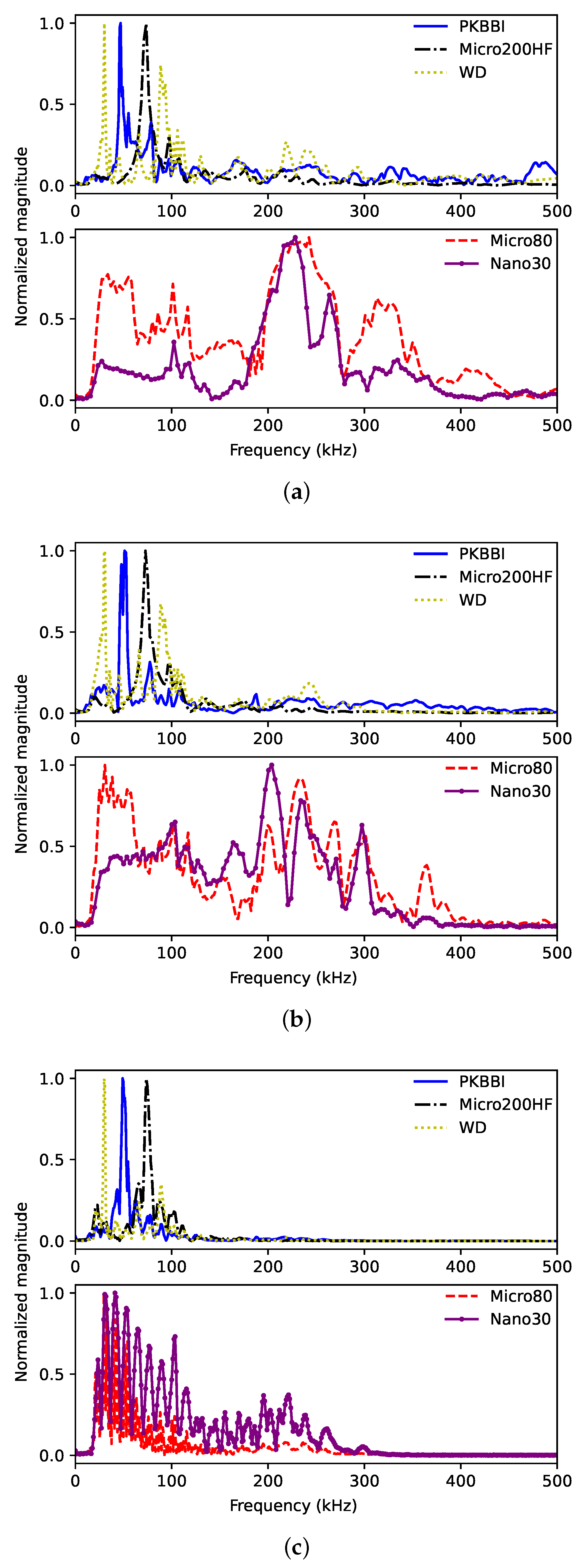
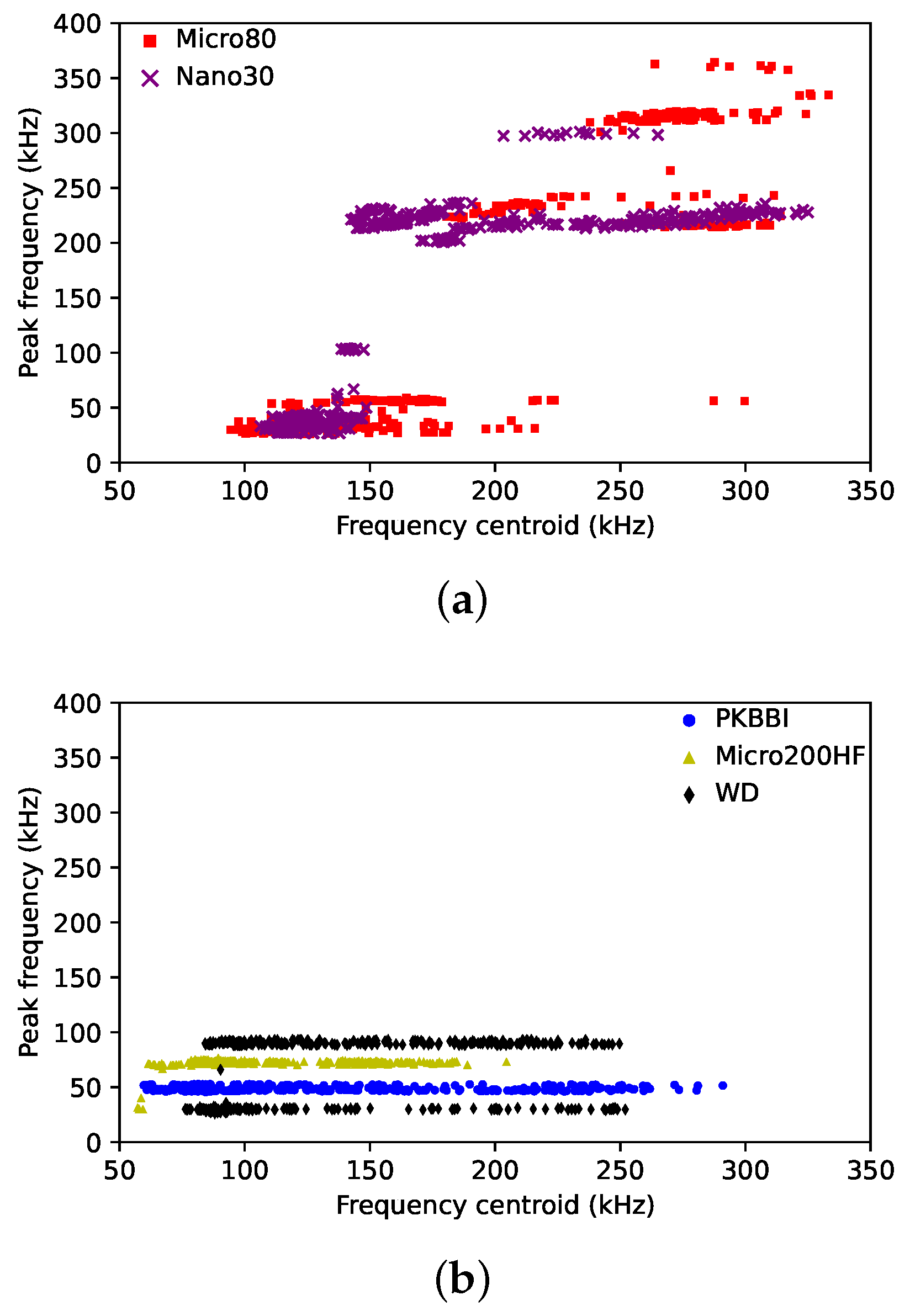
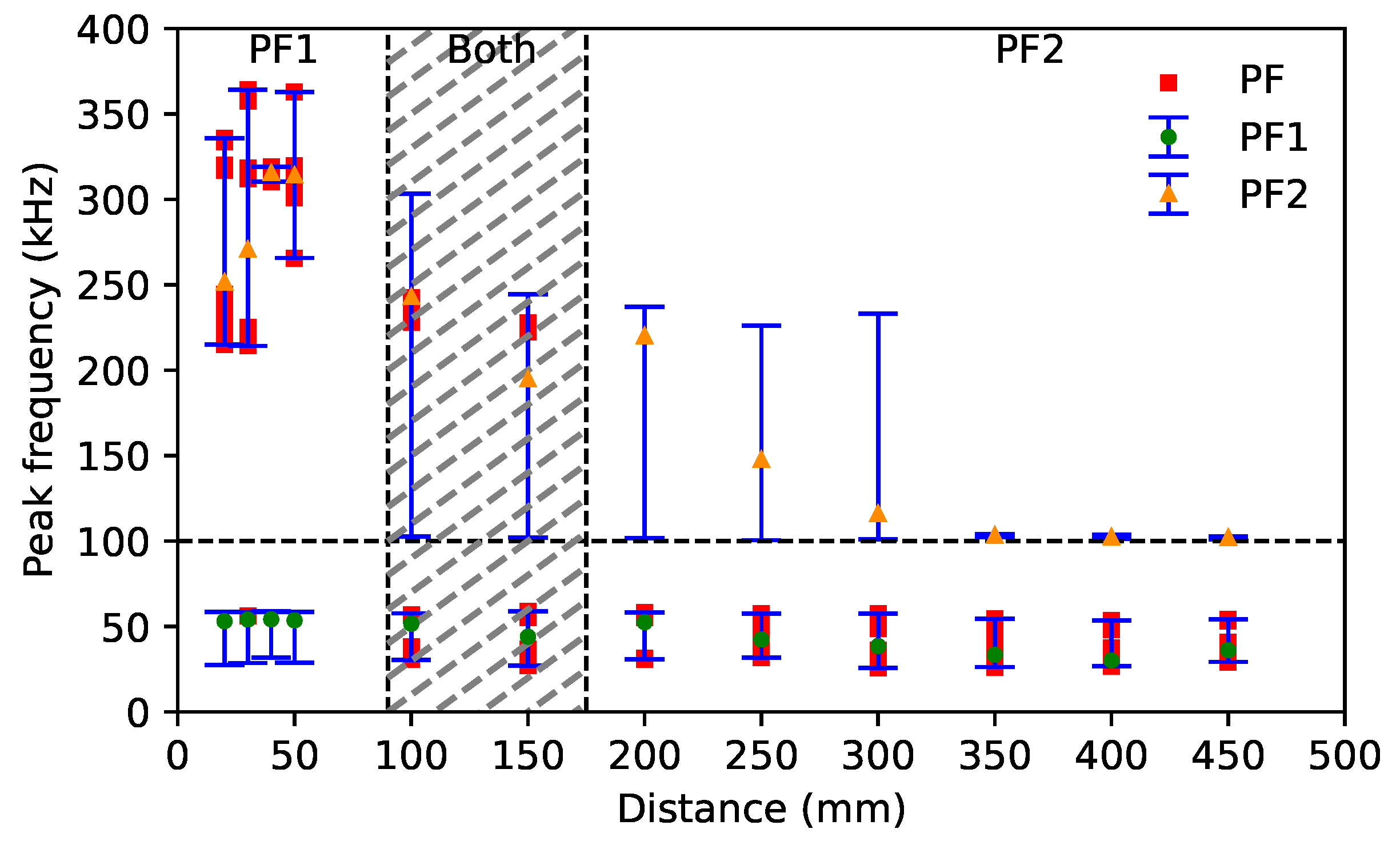
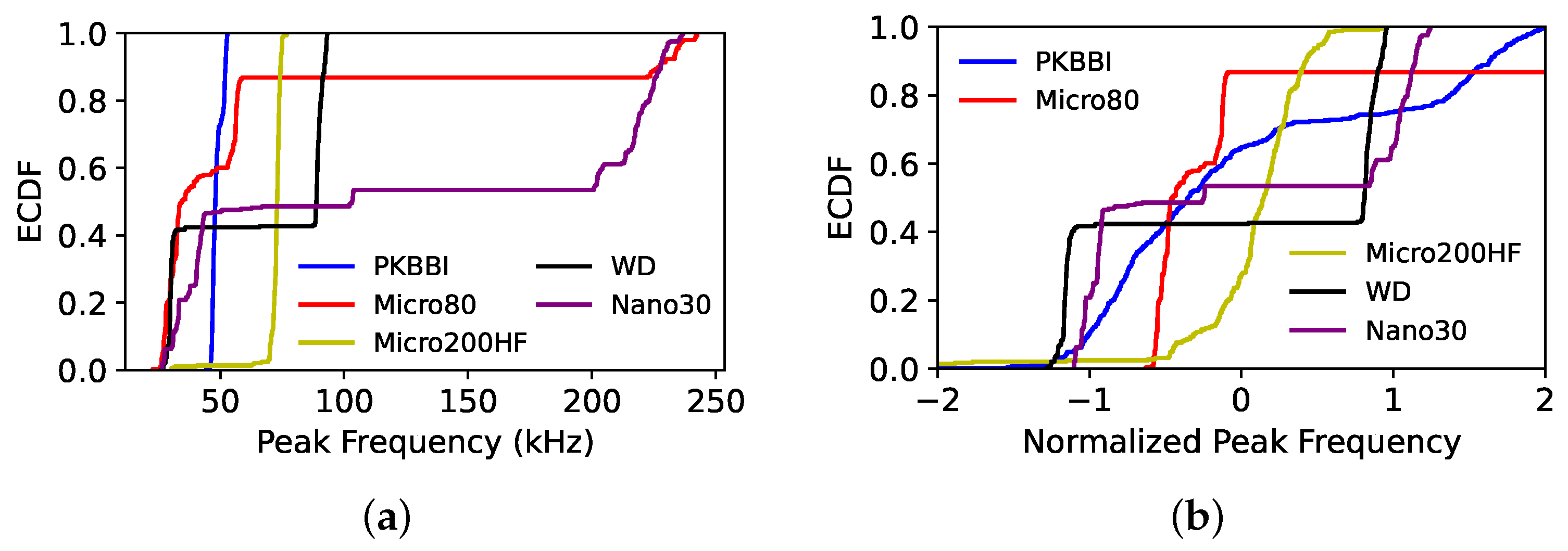
- Strong dependence on the sensor–source distance: As demonstrated in Figure 9a, the peak frequency recorded by the Micro80 and Nano30 sensors jumps from above 100 kHz to below 100 kHz due to the different amplification of the mode. These two sensors record peak frequencies that are higher than when the sensor is close to the source. With increasing source–sensor distances, the peak frequency lies below 100 kHz. Figure 10 shows the peak frequency 1 and the peak frequency 2 as a function of the source–sensor distance for the Micro80 sensor. The peak frequency 1 is constant over all source–sensor distances. However, the peak frequency 2 is about 300 kHz for the source–sensor distance smaller than 100 mm. Due to an attenuation of the mode with increasing distances, especially the high frequency content above , the peak frequency 2 decreases to about 100 kHz when the sensor is far away from the source. The peak frequency data points recorded by the Micro80 sensor as a function of the source–sensor distance are also in Figure 10. It can be seen that, for small distances, the peak frequency is equal to the peak frequency 2, which is higher than . It is seen from the FFT recorded by the Micro80 sensor at a 20 mm distance (Figure 6a). Due to a decreasing normalized magnitude of the peak frequency 2 with increasing distances, the magnitudes of these two peak frequencies are close, as seen in Figure 6b. Then, the peak frequency can be one of the two frequency values at distances of about 100–150 mm. For a large source–sensor distance, as seen from the FFT recorded by the Micro80 sensor at 450 mm distance in Figure 6c, the peak–frequency is equal to the peak frequency of 1.
- (b)
- Low dependence on the source–sensor distance: For the PKBBI sensor and the Micro200HF sensor, the peak frequency is constant over wave propagation. The WD sensor recorded two different peak frequency values, but they are both lower than 100 kHz, as seen in Figure 9b. Thus, the peak frequency recorded by the PKBBI sensor and the Micro200HF sensor is independent of the source–sensor distance, and that recorded by the WD sensor is less dependent on propagation.
- (a)
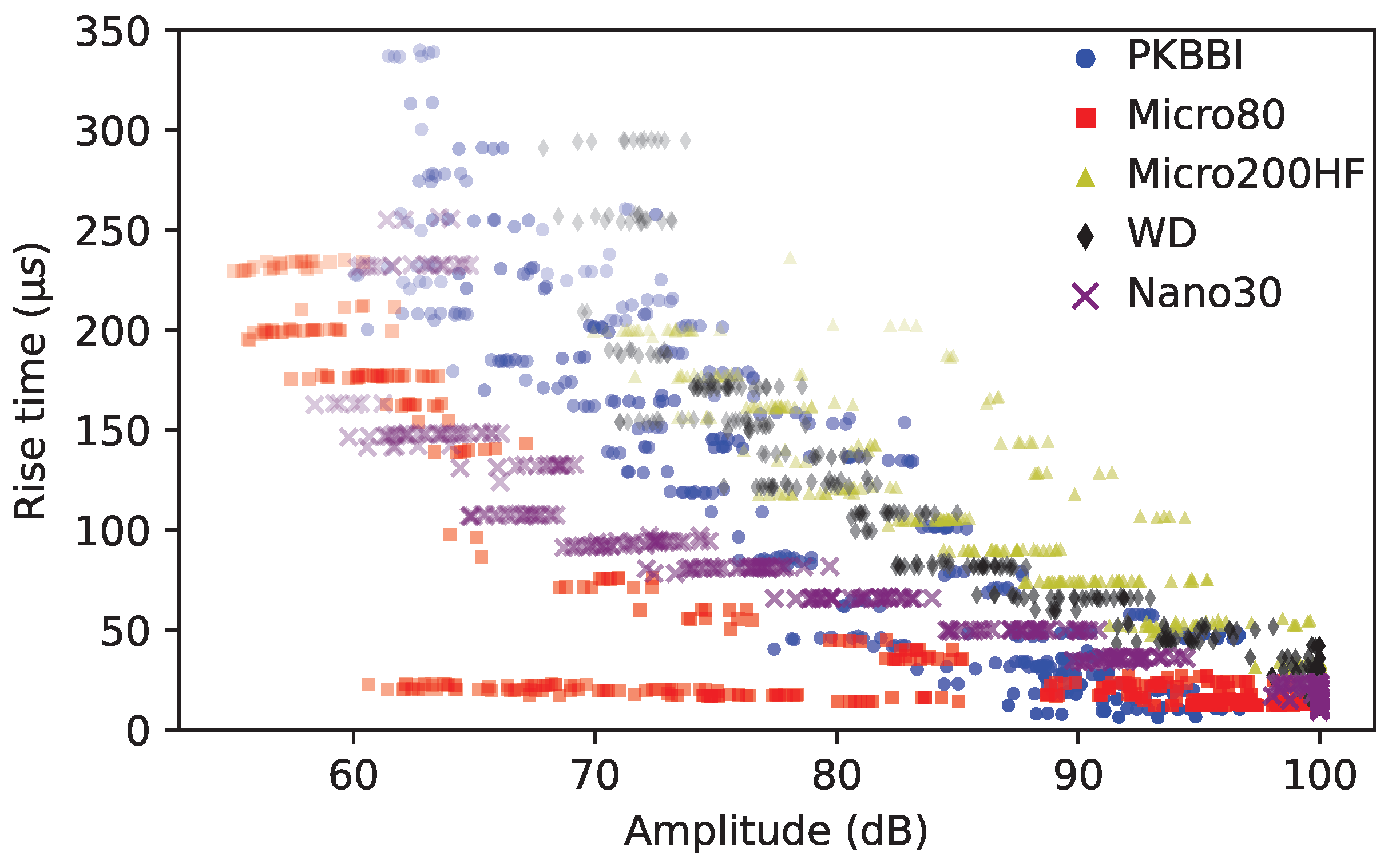
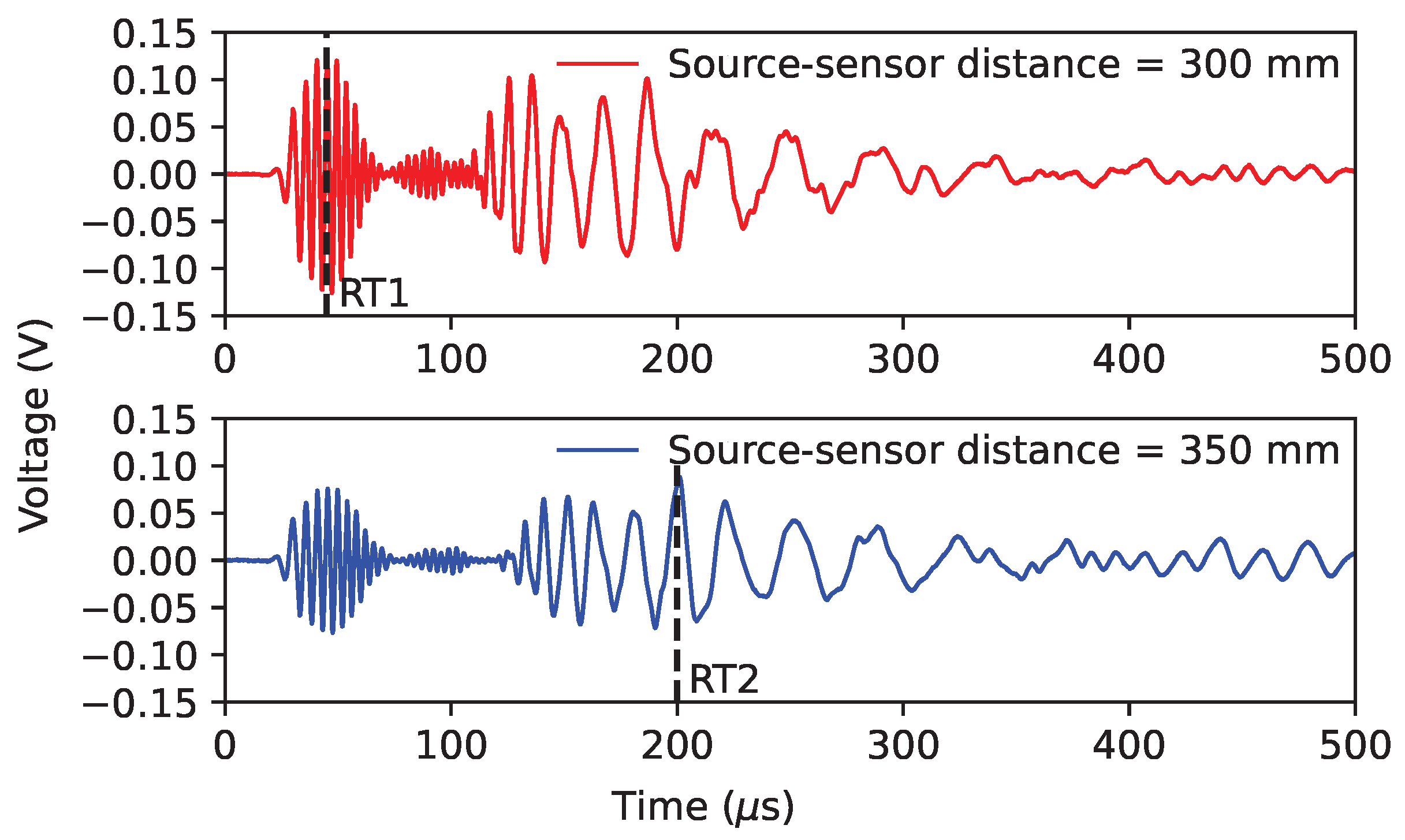
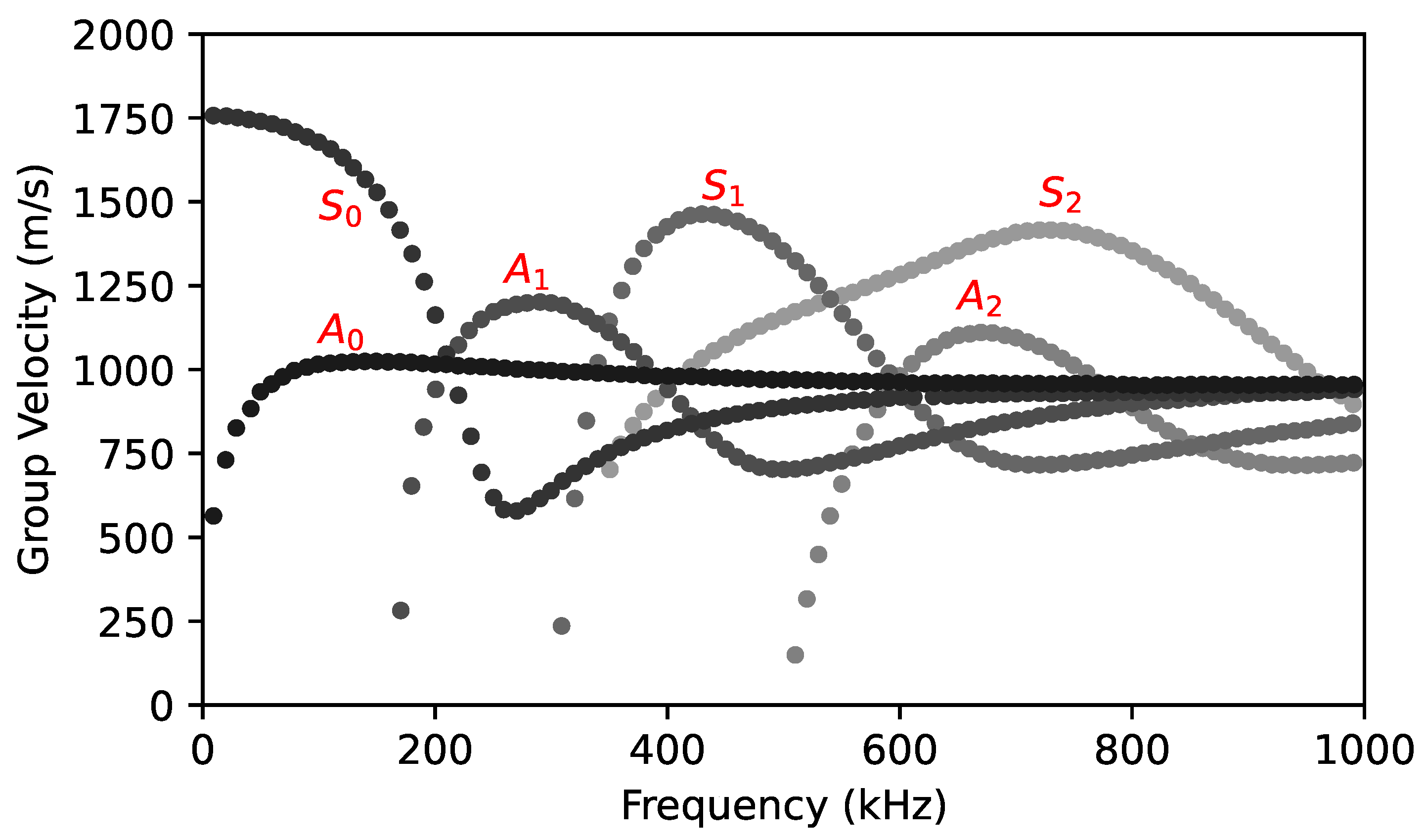
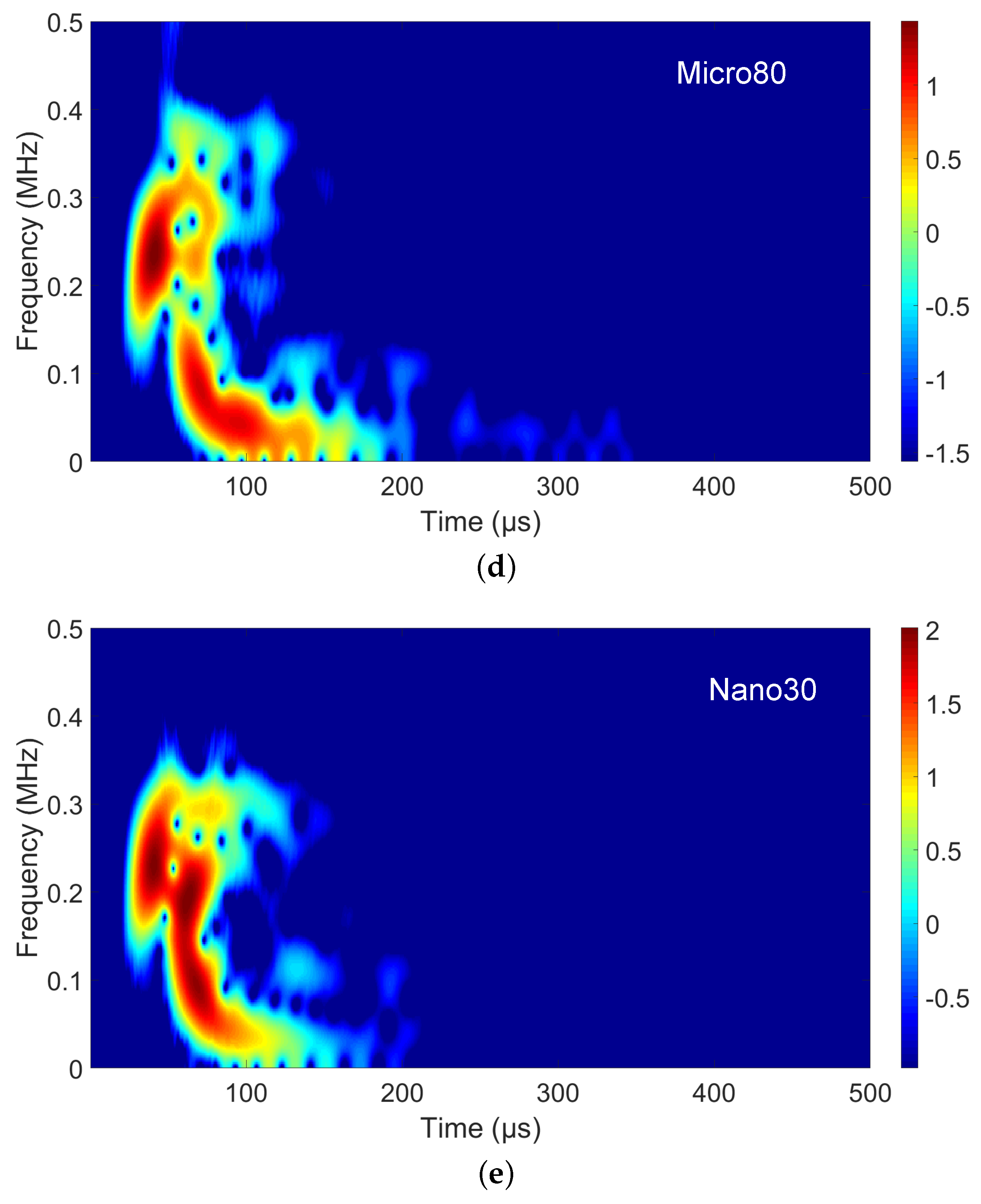
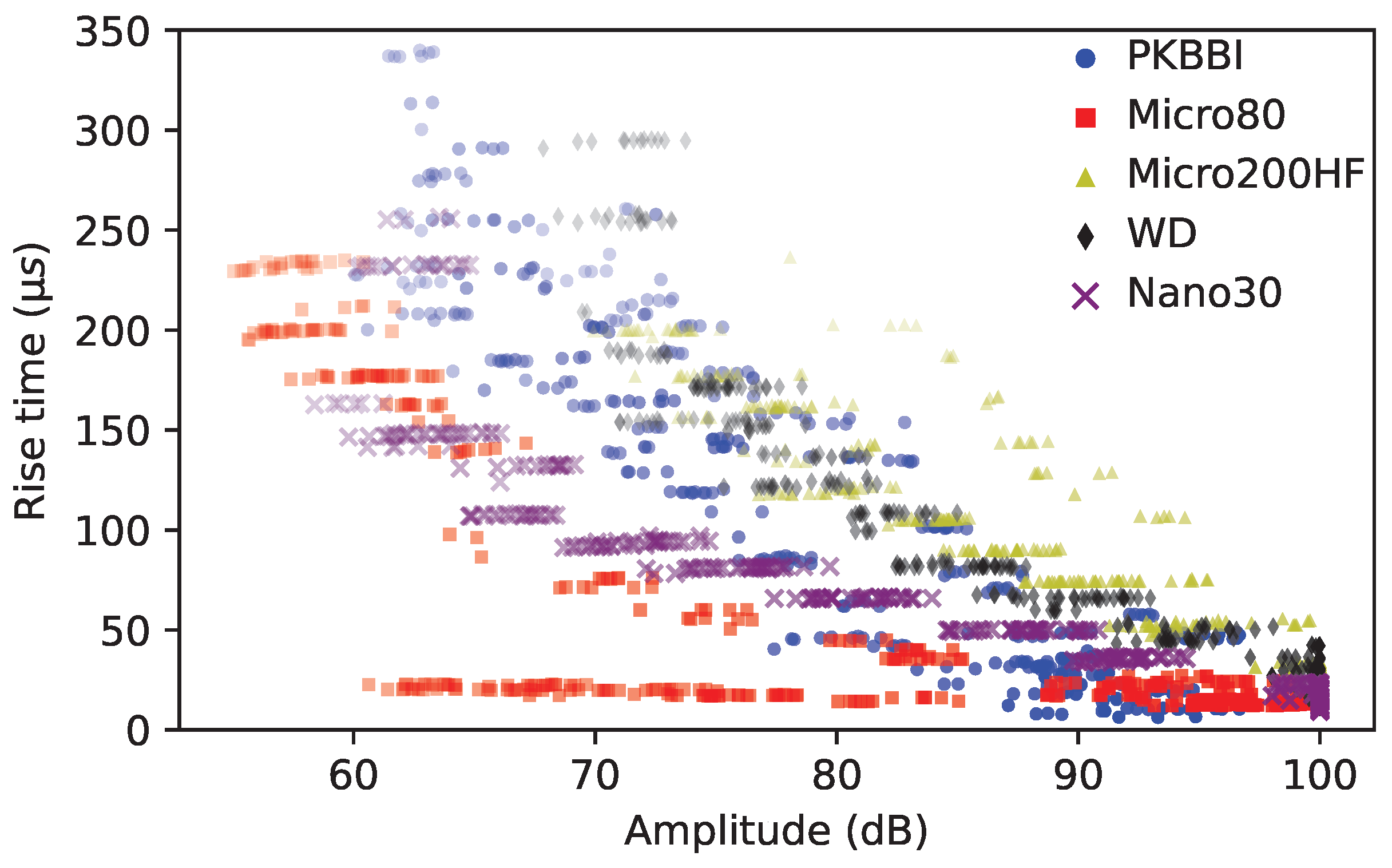
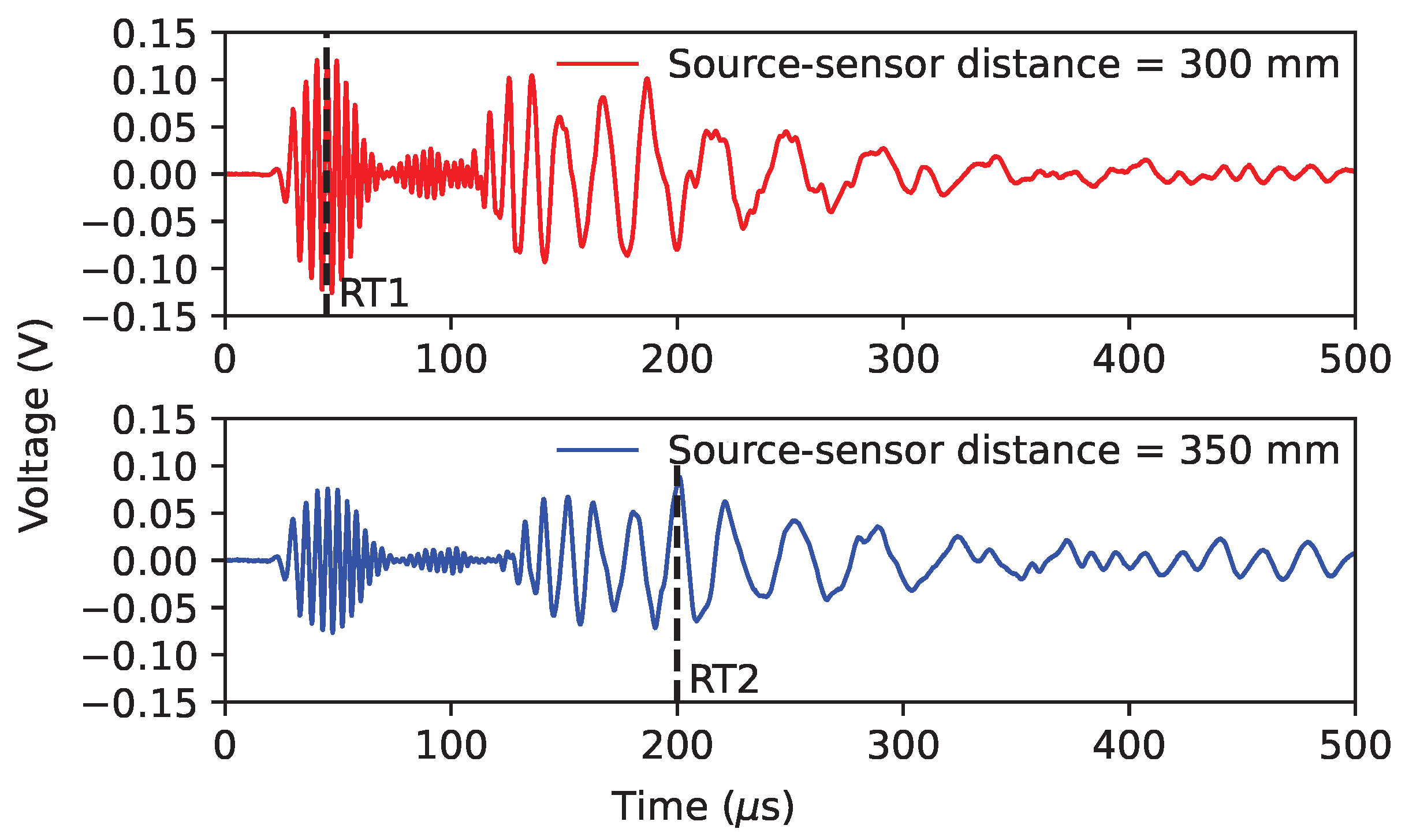
- Dependence on the arrival of the mode: A jump in the rise time that only occurs for the Micro80 sensor is the following significant difference. The whole data of the rise time versus the amplitude recorded by different sensors is shown in Figure 11. The more transparent the marker, the farther away from the source. We can see that the closer to the source, the smaller the rise time on most data points. However, for the Micro80 sensor, some rise time values are constant, about when the source–sensor distance is smaller than 300 mm. As it can be seen in the time–frequency map (Figure 7d) at a 100 mm distance, the mode arrives at , but the magnitude of the mode is larger than that of the mode. Thus, the rise time of the Micro80 sensor depends on the arrival of the mode for the source–sensor distance smaller than 300 mm. Due to the same attenuation of modes on the same medium but different for different modes [45], the magnitudes of modes decrease for all sensors, and the magnitude of the mode will be smaller than the magnitude of the mode for the large source–sensor distance. Figure 12 shows two waveforms in the time domain recorded by the Micro80 sensor at 300 mm and 350 mm distances, where RT1 and RT2 denote two rise times of these two signals. We can see that the rise time RT1 at a 300 mm distance is lower than , which contains a pre-trigger. Whereas the rise time at a 350 mm distance is about , thus yielding a rise time jump, although the source–sensor distance only increases by 50 mm.
- (b)
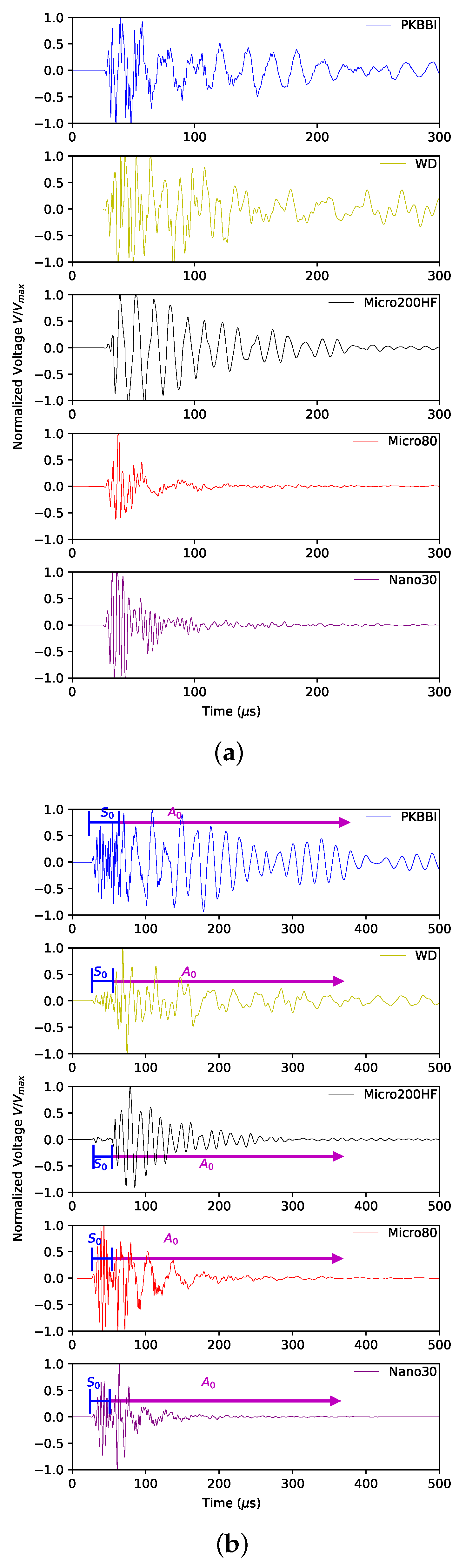
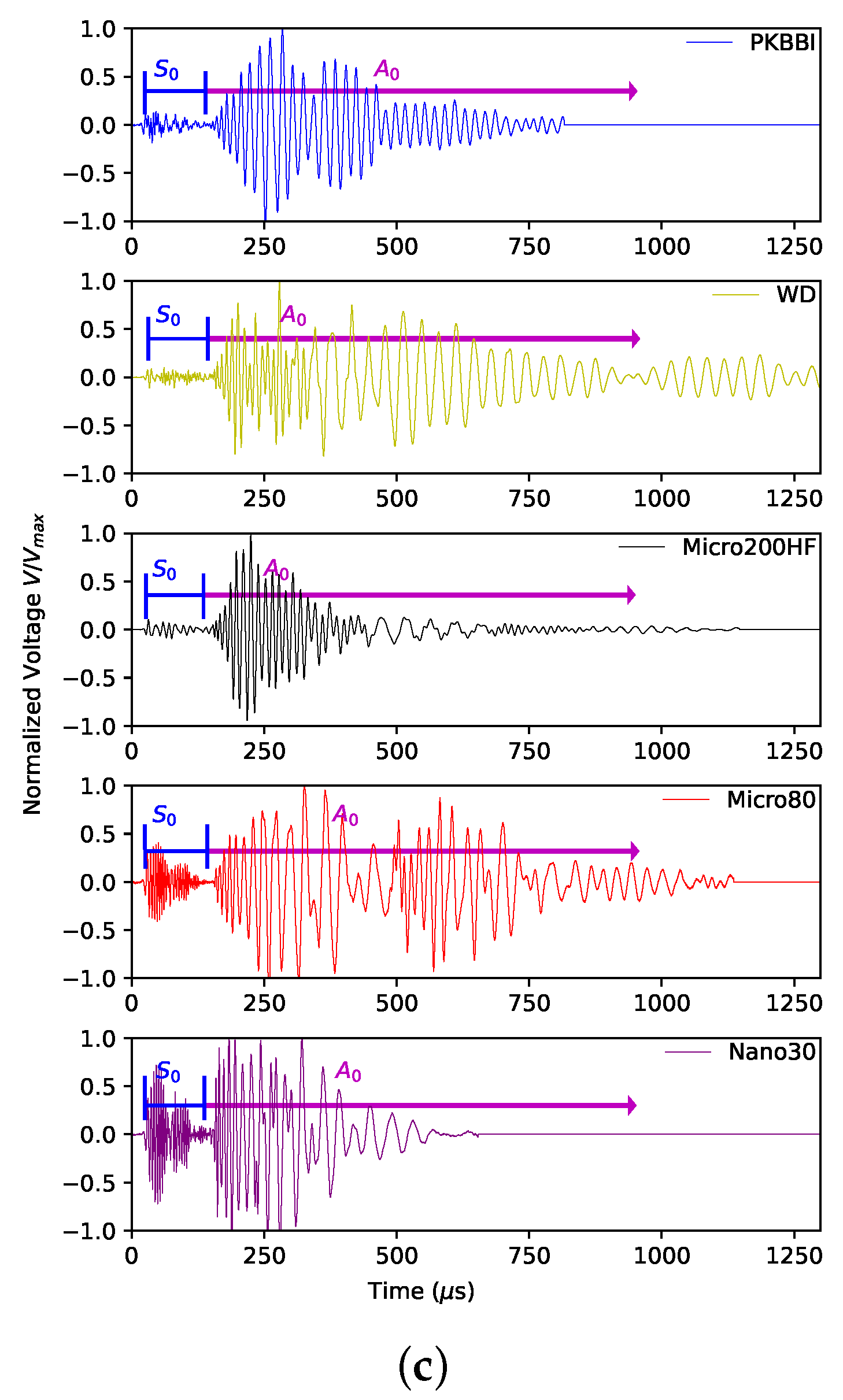
- Dependence on the arrival of the mode: The Nano30 sensor exhibits a high magnitude ratio , similar to the Micro80 sensor. The waveform recorded by the Nano30 sensor from Figure 5b demonstrates that, despite an amplification of the mode, the magnitude of the mode is still lower than the magnitude of the mode. Due to the attenuation of modes, the amplitude of the mode is relatively small, so the rise time recorded by the Nano30 sensor is not dependent on the mode but on the mode. For other sensors, as shown in Figure 7, the magnitude of the mode is smaller than that of the mode when the distance is larger than 100 mm. Thus, the rise time recorded by these sensors depends on the arrival of the mode and increases with increasing source–sensor distances.
3.3. Feature Selection to Obtain a Common Set
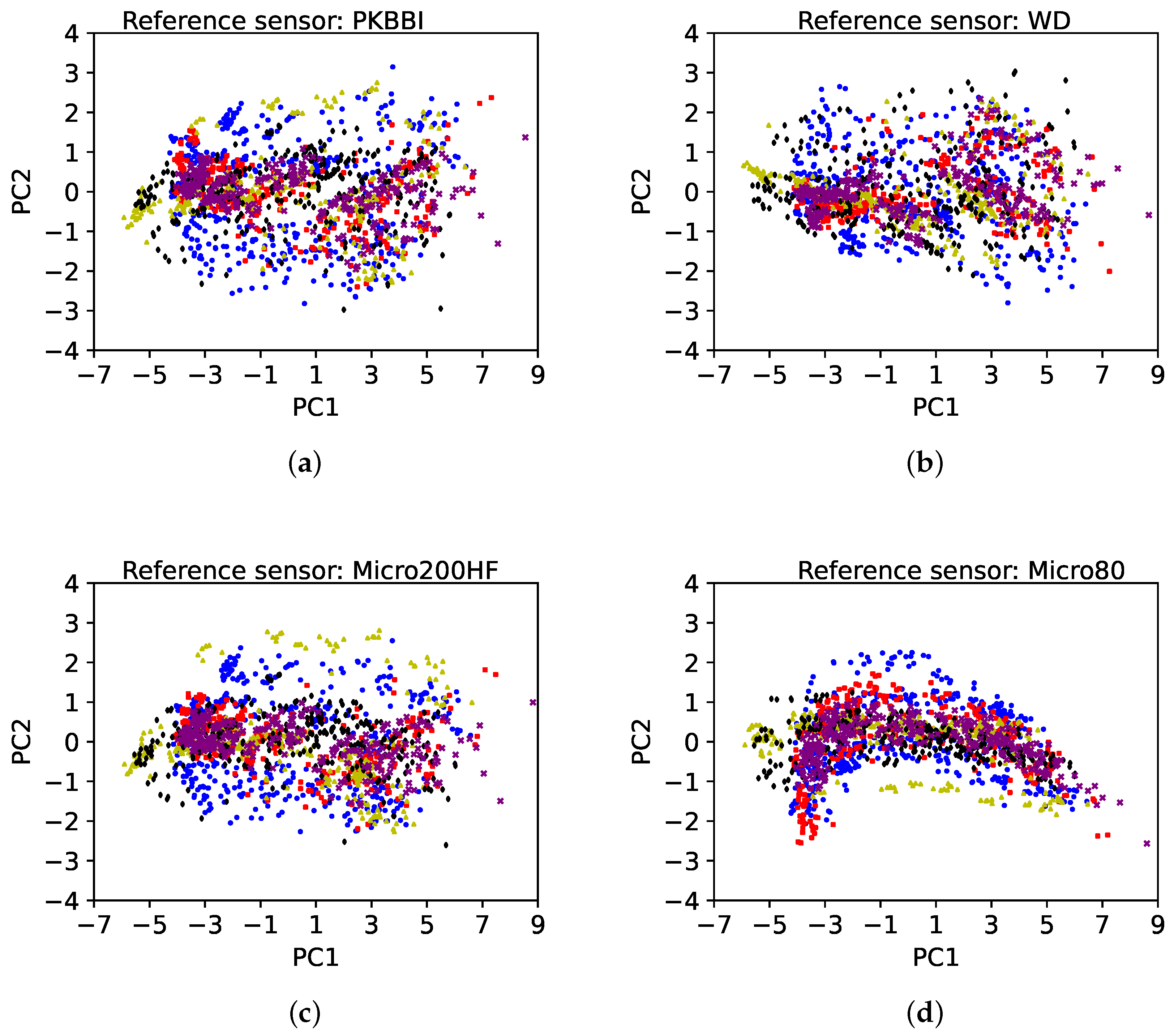
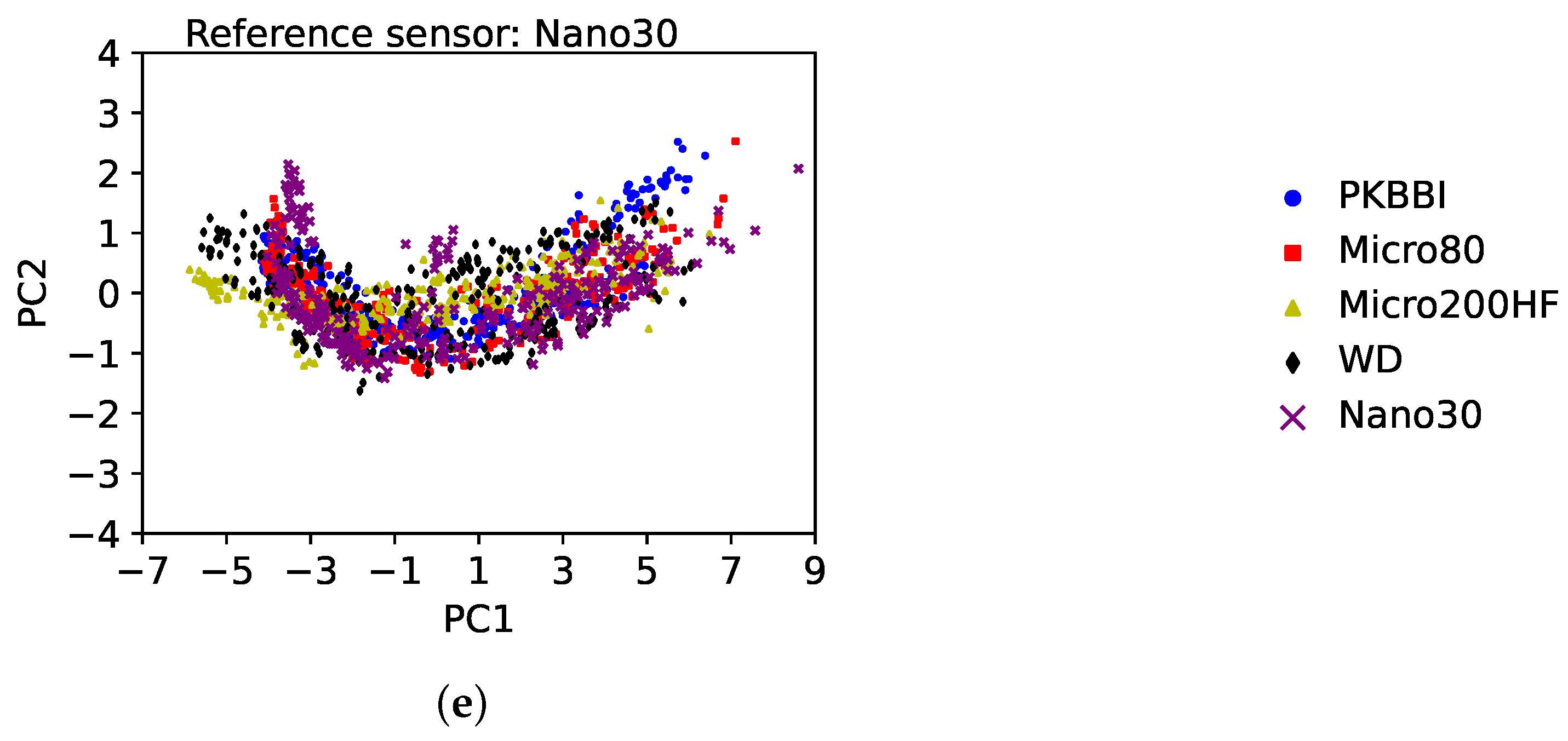
3.4. Principal Component Analysis
4. Conclusions
- 1.
- While selecting the sensor does not have a significant impact on the signal detection, it does play a crucial role in determining the nature of the source. Because of the different amplification of wave modes, when using different sensors, the waveforms in the time and frequency domains differ.
- 2.
- The Micro80 sensor and the Nano30 sensor can add biased information, such as the low rise time recorded by the Micro80 sensor when it is close to the source and the peak frequency jump from above 100 kHz that these two sensors record. This may result in the creation of an additional class during the process of classifying the data. The peak frequency, which is highly dependent on both the distance and sensor type, is not a reliable descriptor for classification.
- 3.
- The flow chart of the detailed steps is shown in Figure 17. This procedure allows one to obtain a compact representation of the dataset with good generalization ability. The Z-score normalized method has been proven to be a simple and effective way to obtain more descriptor sets from the same distribution of sensors. After the Kruskal–Wallis test and the outlier computation, it is possible to choose a sufficiently large subset of features in order to describe the same source recorded by different sensors. This subset of features includes descriptors in both the time and frequency domains. The principal component analysis reduces the feature set’s large dimension, and the same source is clustered by the dataset recorded by multiple sensors, regardless of the reference eigenvector matrix.
- 4.
- In the future, the influence of the plate thickness should be considered in the process of reducing the sensor effect. This post-processing will be applied to the PLB test with thicker plates.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Godin, N.; Reynaud, P.; Fantozzi, G. Acoustic emission: Definition and Overview. In Acoustic Emission and Durability of Composite Materials; ISTE-Wiley Editions: Hoboken, NJ, USA, 2018; p. 1. ISBN 9781786300195. [Google Scholar]
- Sause, M. Acoustic Emission. In In Situ Monitoring of Fiber-Reinforced Composites: Theory, Basic Concepts, Methods, and Applications; Springer Series in Materials Science; Springer: Cham, Switzerland, 2016; p. 131. [Google Scholar] [CrossRef]
- Holford, K.M. Acoustic emission in structural health monitoring. Key Eng. Mater. 2009, 413, 15–28. [Google Scholar] [CrossRef]
- Racle, E.; Godin, N.; Reynaud, P.; Fantozzi, G. Fatigue Lifetime of Ceramic Matrix Composites at Intermediate Temperature by Acoustic Emission. Materials 2017, 10, 658. [Google Scholar] [CrossRef] [PubMed]
- Sause, M.G.R.; Horn, S. Quantification of the Uncertainty of Pattern Recognition Approaches Applied to Acoustic Emission Signals. J. Nondestruct. Eval. 2013, 32, 242–255. [Google Scholar] [CrossRef]
- Zhang, M.L.; Zhang, Q.H.; Li, J.Q.; Xu, J.L.; Zheng., J.W. Classification of Acoustic Emission Signals in Wood Damage and Fracture Process Based on Empirical Mode Decomposition, Discrete Wavelet Transform Methods, and Selected Features. J. Wood Sci. 2021, 67, 59. [Google Scholar] [CrossRef]
- Rahman, N.A.I.A.; May, Z.; Mahmud, M.S. Unsupervised Classification of Acoustic Emission Signal to Discriminate Composite Failure at Low Frequency. In Proceedings of the International Conference on Artificial Intelligence for Smart Community; Ibrahim, R., Porkumaran, K., Kannan, R., Mohd Nor, N., Prabakar, S., Eds.; Lecture Notes in Electrical Engineering. Springer Nature: Singapore, 2022; pp. 797–806. [Google Scholar]
- Roundi, W.; El Mahi, A.; El Gharad, A.; Rebiere, J.L. Acoustic Emission Monitoring of Damage Progression in Glass/Epoxy Composites during Static and Fatigue Tensile Tests. Appl. Acoust. 2018, 132, 124–134. [Google Scholar] [CrossRef]
- Sikdar, S.; Liu, D.; Kundu, A. Acoustic Emission Data Based Deep Learning Approach for Classification and Detection of Damage-Sources in a Composite Panel. Compos. Part B Eng. 2022, 228, 109450. [Google Scholar] [CrossRef]
- Qiao, S.; Huang, M.; Liang, Y.J.; Zhang, S.Z.; Zhou, W. Damage Mode Identification in Carbon/Epoxy Composite via Machine Learning and Acoustic Emission. Polym. Compos. 2023, 44, 2427–2440. [Google Scholar] [CrossRef]
- Yue, J.G.; Wang, Y.N.; Beskos, D.E. Uniaxial Tension Damage Mechanics of Steel Fiber Reinforced Concrete Using Acoustic Emission and Machine Learning Crack Mode Classification. Cem. Concr. Compos. 2021, 123, 104205. [Google Scholar] [CrossRef]
- Šofer, M.; Šofer, P.; Pagść, M.; Volodarskaja, A.; Babiuch, M.; Gruń, F. Acoustic Emission Signal Characterisation of Failure Mechanisms in CFRP Composites Using Dual-Sensor Approach and Spectral Clustering Technique. Polymers 2023, 15, 47. [Google Scholar] [CrossRef] [PubMed]
- Momon, S.; Godin, N.; Reynaud, P.; R’Mili, M.; Fantozzi, G. Unsupervised and Supervised Classification of AE Data Collected during Fatigue Test on CMC at High Temperature. Compos. Part A Appl. Sci. Manuf. 2012, 43, 254–260. [Google Scholar] [CrossRef]
- Liu, H.Q.; Fabien, B.; Takayuki, S.; Manabu, E.; Satoshi, E. Clustering Analysis of Acoustic Emission Signals during Compression Tests in Mille-Feuille Structure Materials. Mater. Trans. 2022, 63, 319–328. [Google Scholar] [CrossRef]
- Muir, C.; Tulshibagwale, N.; Furst, A.; Swaminathan, B.; Almansour, A.S.; Sevener, K.; Presby, M.; Kiser, J.D.; Pollock, T.M.; Daly, S.; et al. Quantitative Benchmarking of Acoustic Emission Machine Learning Frameworks for Damage Mechanism Identification. Integr. Mater. Manuf. Innov. 2023, 12, 70–81. [Google Scholar] [CrossRef]
- Ciaburro, G.; Gino, I. Machine-Learning-Based Methods for Acoustic Emission Testing: A Review. Appl. Sci. 2022, 12, 10476. [Google Scholar] [CrossRef]
- Kharrat, M.; Placet, V.; Ramasso, E.; Boubakar, M.L. Influence of Damage Accumulation under Fatigue Loading on the AE-Based Health Assessment of Composite Materials: Wave Distortion and AE-Features Evolution as a Function of Damage Level. Compos. Part A Appl. Sci. Manuf. 2018, 109, 615–627. [Google Scholar] [CrossRef]
- Ni, Q.Q.; Kurashiki, K.; Iwamoto, M. AE Technique for Identification of Micro Failure Modes in CFRP Composites. J. Soc. Mater. Sci. 2001, 50, 67–71. [Google Scholar] [CrossRef] [PubMed]
- Carpinteri, A.; Lacidogna, G.; Accornero, F.; Mpalaskas, A.C.; Matikas, T.E.; Aggelis, D.G. Influence of Damage in the Acoustic Emission Parameters. Cem. Concr. Compos. 2013, 44, 9–16. [Google Scholar] [CrossRef]
- Maillet, E.; Baker, C.; Morscher, G.N.; Pujar, V.V.; Lemanski, J.R. Feasibility and Limitations of Damage Identification in Composite Materials Using Acoustic Emission. Compos. Part A Appl. Sci. Manuf. 2015, 75, 77–83. [Google Scholar] [CrossRef]
- Godin, N.; Reynaud, P.; Fantozzi, G. Challenges and Limitations in the Identification of Acoustic Emission Signature of Damage Mechanisms in Composites Materials. Appl. Sci. 2018, 8, 1267. [Google Scholar] [CrossRef]
- Guel, N.; Hamam, Z.; Godin, N.; Reynaud, P.; Caty, O.; Bouillon, F.; Paillassa, A. Data Merging of AE Sensors with Different Frequency Resolution for the Detection and Identification of Damage in Oxide-Based Ceramic Matrix Composites. Materials 2020, 13, 4691. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Wang, B.; Yang, H.; Grigg, S. A Comparison of Two Types of Acoustic Emission Sensors for the Characterization of Hydrogen-Induced Cracking. Sensors 2023, 23, 3018. [Google Scholar] [CrossRef]
- Le Gall, T.; Monnier, T.; Fusco, C.; Godin, N.; Hebaz, S.E. Towards Quantitative Acoustic Emission by Finite Element Modelling: Contribution of Modal Analysis and Identification of Pertinent Descriptors. Appl. Sci. 2018, 8, 2557. [Google Scholar] [CrossRef]
- Sause, M.G.R.; Hamstad, M.A.; Horn, S. Finite Element Modeling of Conical Acoustic Emission Sensors and Corresponding Experiments. Sensors Actuators A Phys. 2012, 184, 64–71. [Google Scholar] [CrossRef]
- Mu, W.; Gao, Y.; Wang, Y.; Liu, G.; Hu, H. Modeling and Analysis of Acoustic Emission Generated by Fatigue Cracking. Sensors 2022, 22, 1208. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Yalcinkaya, H.; Ozevin, D. Numerical Approach to Absolute Calibration of Piezoelectric Acoustic Emission Sensors Using Multiphysics Simulations. Sensors Actuators A Phys. 2017, 256, 12–23. [Google Scholar] [CrossRef]
- Tsangouri, E.; Aggelis, D.G. The Influence of Sensor Size on Acoustic Emission Waveforms—A Numerical Study. Appl. Sci. 2018, 8, 168. [Google Scholar] [CrossRef]
- Ghadarah, N.; Ayre, D. A Review on Acoustic Emission Testing for Structural Health Monitoring of Polymer-Based Composites. Sensors 2023, 23, 6945. [Google Scholar] [CrossRef] [PubMed]
- Saeedifar, M.; Zarouchas, D. Damage Characterization of Laminated Composites Using Acoustic Emission: A Review. Compos. Part B Eng. 2020, 195, 108039. [Google Scholar] [CrossRef]
- Hamam, Z.; Godin, N.; Reynaud, P.; Fusco, C.; Carrère, N.; Doitrand, A. Transverse Cracking Induced Acoustic Emission in Carbon Fiber-Epoxy Matrix Composite Laminates. Materials 2022, 15, 394. [Google Scholar] [CrossRef] [PubMed]
- Hamam, Z.; Godin, N.; Fusco, C.; Monnier, T. Modelling of Acoustic Emission Signals due to Fiber Break in a Model Composite Carbon/Epoxy: Experimental Validation and Parametric Study. Appl. Sci. 2019, 9, 5124. [Google Scholar] [CrossRef]
- Sause, M.G.R. Investigation of Pencil Lead Breaks as Acoustic Emission Sources. e-J. Nondestruct. Test. 2013, 18, 184–196. [Google Scholar]
- Gorman, M.R.; Prosser, W.H. AE Source Orientation by Plate Wave Analysis. J. Acoust. Emiss. 1991, 9, 283–288. [Google Scholar]
- ASTM E1106-12; Standard Test Method for Primary Calibration of Acoustic Emission Sensors. ASTM International: West Conshohocken, PA, USA, 2021. [CrossRef]
- ASTM E976-15; Standard Guide for Determining the Reproducibility of Acoustic Emission Sensor Response. ASTM International: West Conshohocken, PA, USA, 2021. [CrossRef]
- Hamstad, M.A. Acoustic emission signals generated by monopole (pencil lead break) versus dipole sources: Finite element modeling and experiments. J. Acoust. Emiss. 2007, 25, 92–106. [Google Scholar]
- Morizet, N.; Godin, N.; Tang, J.; Maillet, E.; Fregonese, M.; Normand, B. Classification of acoustic emission signals using wavelets and random forests: Application to localized corrosion. Mech. Syst. Signal Process. 2016, 70, 1026–1037. [Google Scholar] [CrossRef]
- Singh, D.; Singh, B. Investigating the impact of data normalization on classification performance. Appl. Soft Comput. 2020, 97, 105524. [Google Scholar] [CrossRef]
- Ostertagoǎ, E.; Ostertag, O.; Kov̌âc, J. Methodology and application of the kruskal-wallis test. Appl. Mech. Mater. 2014, 611, 115–120. [Google Scholar] [CrossRef]
- Jolliffe, I.T. Definition and Derivation of Principal Components. In Principal Component Analysis; Springer: New York, NY, USA, 2002; ISBN 978-0-387-95442-4. [Google Scholar]
- Hotelling, H. Analysis of a Complex of Statistical Variables into Principal Components. J. Educ. Psychol. 1933, 24, 417–441. [Google Scholar] [CrossRef]
- Taghizadeh, J.; Najafabadi, M.A. Classification of acoustic emission signals collected during tensile tests on unidirectional ultra high molecular weight polypropylene fiber reinforced epoxy composites using principal component analysis. Russ. J. Nondestruct. Test. 2011, 47, 491–500. [Google Scholar] [CrossRef]
- Godin, N.; Huguet, S.; Gaertner, R.; Salmon, L. Clustering of acoustic emission signals collected during tensile tests on unidirectional glass/polyester composite using supervised and unsupervised classifiers. NDT E Int. 2004, 37, 253–264. [Google Scholar] [CrossRef]
- Gorman, M.R. Plate wave acoustic emission. J. Acoust. Soc. Am. 1991, 90, 358–364. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Resonant Frequency 1, Ref 1 V/(m/s) (kHz) | Resonant Frequency 2, Ref 1 V/µbar | Operating Frequency Range (kHz) | Sensor Diameter (kHz) (mm) |
|---|---|---|---|---|
| PKBBI | - | - | 50–400 | 20 |
| WD | 125 | 450 | 125–1000 | 17.8 |
| Micro200HF | 2500 | - | 500–4500 | 9.5 |
| Nano30 | 140 | 300 | 125–750 | 8 |
| Micro80 | 250 | 325 | 200–900 | 10 |
| Descriptor | Symbol | Unit | |
|---|---|---|---|
| 1 | Amplitude | A | dB |
| 2 | Energy | E | V2 |
| 3 | Zero-crossing rate | ZCR | - |
| 4 | Rise time | RT | μs |
| 5 | Temporal centroid | TC | μs |
| 6 | Temporal decrease | TD | |
| 7 | Partial Power1 ]0, 100] | PP1 | - |
| 8 | Partial Power2 ]100, 225] | PP2 | - |
| 9 | Partial Power3 ]225, 300] | PP3 | - |
| 10 | Partial Power4 ]300, 500] | PP4 | - |
| 11 | Frequency centroid | FC | kHz |
| 12 | Peak frequency ]0, 1000] | PF | kHz |
| - | Peak frequency 1 ]0, 100] | PF1 | kHz |
| - | Peak frequency 2 [100, 1000] | PF2 | kHz |
| 13 | Spectral spread | SS | kHz |
| 14 | Spectral skewness | SSk | - |
| 15 | Spectral kurtosis | SK | - |
| 16 | Spectral slope | SSlope | |
| 17 | Roll-off frequency | - | kHz |
| 18 | Spectral spread to peak | SSP | kHz |
| 19 | Spectral skewness to peak | SSKP | - |
| 20 | Spectral kurtosis to peak | SKP | - |
| 21 | Roll-on frequency | - | kHz |
| Descriptor | ZSN | MC | PS | VSS | PT | MMN | MMADN | VTN | LS | HT |
|---|---|---|---|---|---|---|---|---|---|---|
| 1. A | 1.00 | 0.83 | 0.98 | 0.96 | 1.00 | 0.00 | 0.00 | 1.00 | 1.00 | 1.00 |
| 2. E | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.01 | 0.78 | 0.00 | 0.00 | 0.00 |
| 3. ZCR | 0.70 | 0.12 | 0.39 | 0.46 | 0.63 | 0.00 | 0.00 | 0.70 | 0.70 | 0.70 |
| 4. RT | 0.93 | 0.19 | 0.65 | 0.70 | 0.88 | 0.00 | 0.00 | 0.93 | 0.93 | 0.93 |
| 5. TC | 0.97 | 0.54 | 0.89 | 0.46 | 0.96 | 0.00 | 0.00 | 0.97 | 0.97 | 0.97 |
| 6. TD | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.02 | 0.00 | 0.00 | 0.00 |
| 7. PP1 | 0.93 | 0.76 | 0.87 | 0.11 | 0.72 | 0.00 | 0.02 | 0.93 | 0.93 | 0.93 |
| 8. PP2 | 0.70 | 0.59 | 0.65 | 0.35 | 0.45 | 0.00 | 0.07 | 0.70 | 0.70 | 0.70 |
| 9. PP3 | 0.95 | 0.26 | 0.52 | 0.92 | 0.75 | 0.00 | 0.00 | 0.95 | 0.95 | 0.95 |
| 10. PP4 | 0.13 | 0.00 | 0.00 | 0.00 | 0.03 | 0.00 | 0.04 | 0.13 | 0.13 | 0.13 |
| 11. FC | 0.56 | 0.01 | 0.14 | 0.44 | 0.64 | 0.00 | 0.03 | 0.56 | 0.56 | 0.56 |
| 12. PF | 0.00 | 0.00 | 0.00 | 0.00 | 0.02 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| 13. SS | 0.85 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.09 | 0.85 | 0.85 | 0.85 |
| 14. SSK | 1.00 | 0.83 | 0.88 | 0.89 | 0.89 | 0.00 | 0.00 | 1.00 | 1.00 | 1.00 |
| 15. SK | 0.98 | 0.18 | 0.24 | 0.20 | 0.60 | 0.00 | 0.00 | 0.98 | 0.98 | 0.98 |
| 16. SSlope | 0.68 | 0.02 | 0.43 | 0.37 | 0.77 | 0.00 | 0.00 | 0.68 | 0.68 | 0.68 |
| 17. Roll-off | 0.87 | 0.00 | 0.16 | 0.00 | 0.46 | 0.00 | 0.45 | 0.87 | 0.87 | 0.87 |
| 18. SSP | 0.95 | 0.00 | 0.06 | 0.07 | 0.61 | 0.00 | 0.47 | 0.95 | 0.95 | 0.95 |
| 19. SSKP | 0.93 | 0.61 | 0.86 | 0.39 | 0.06 | 0.00 | 0.00 | 0.93 | 0.93 | 0.93 |
| 20. SKP | 0.97 | 0.01 | 0.08 | 0.24 | 0.27 | 0.00 | 0.00 | 0.97 | 0.97 | 0.97 |
| 21. Roll-on | 0.99 | 0.00 | 0.09 | 0.01 | 0.54 | 0.00 | 0.09 | 0.99 | 0.99 | 0.99 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Godin, N.; Doitrand, A.; Fusco, C. Reduction in the Sensor Effect on Acoustic Emission Data to Create a Generalizable Library by Data Merging. Sensors 2024, 24, 2421. https://doi.org/10.3390/s24082421
Chen X, Godin N, Doitrand A, Fusco C. Reduction in the Sensor Effect on Acoustic Emission Data to Create a Generalizable Library by Data Merging. Sensors. 2024; 24(8):2421. https://doi.org/10.3390/s24082421
Chicago/Turabian StyleChen, Xi, Nathalie Godin, Aurélien Doitrand, and Claudio Fusco. 2024. "Reduction in the Sensor Effect on Acoustic Emission Data to Create a Generalizable Library by Data Merging" Sensors 24, no. 8: 2421. https://doi.org/10.3390/s24082421