
Developing and Testing High-Performance SHM Sensors Mounting Low-Noise MEMS Accelerometers
 , , , ,
, , , ,
Abstract
1. Introduction
- Identifying the modal frequencies of the structure and monitoring how they vary over time to detect the presence of damage in the structure as a consequence of seismic events or just because of the effects of aging.
- Filtering the natural frequencies from the environmental noise due to natural reasons (wind, rain, or daily/seasonal temperature variations) or anthropical ones (human activities, such as vehicular traffic or the possible presence of work constructions in the surroundings).
- Understanding if the vibrations represent a disturbance or damage factor for the structure and the people living there.
- Vibrational analysis, with which it is possible to detect the real-time magnitude of the stress in terms of spectral analysis (amplitude and frequency) to be compared with the thresholds defined by the international limits (UNI, DIN).
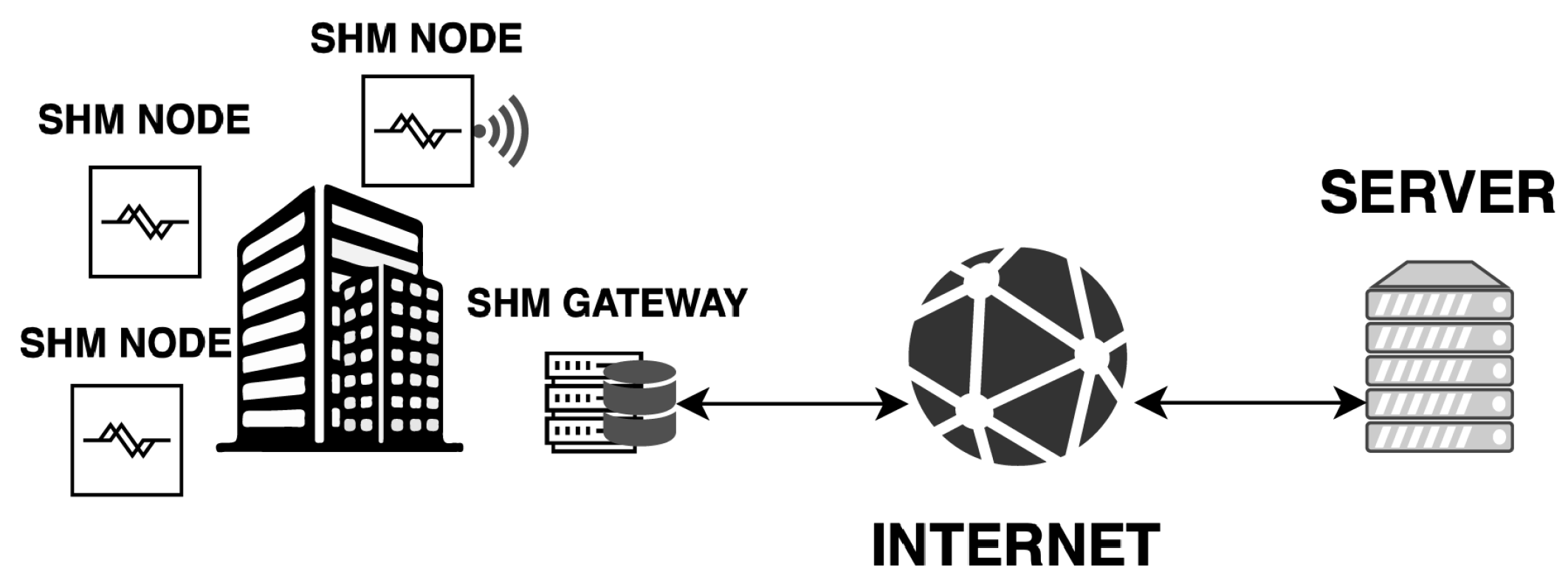
2. Description of the Smart-Wired Monitoring System
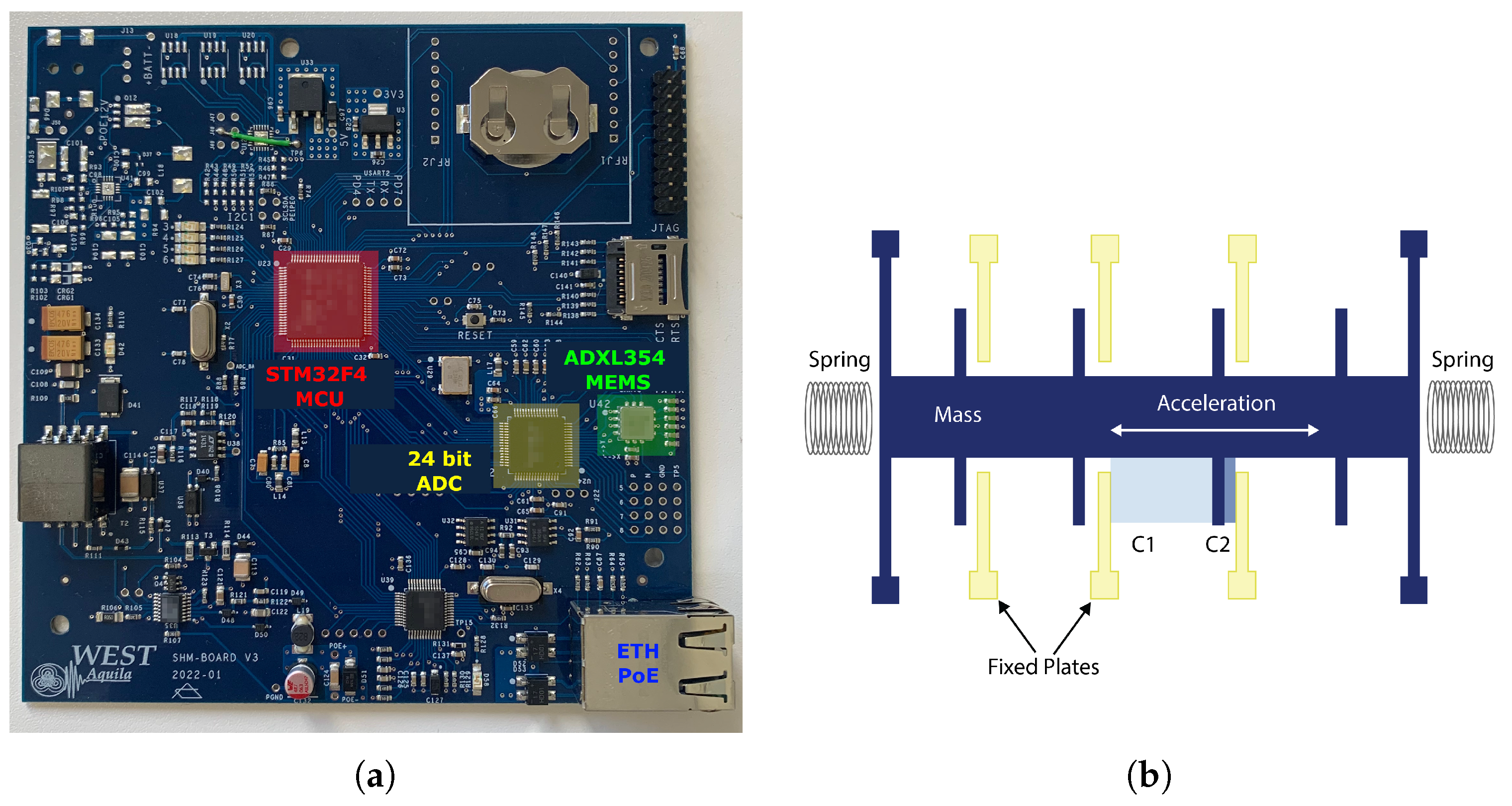
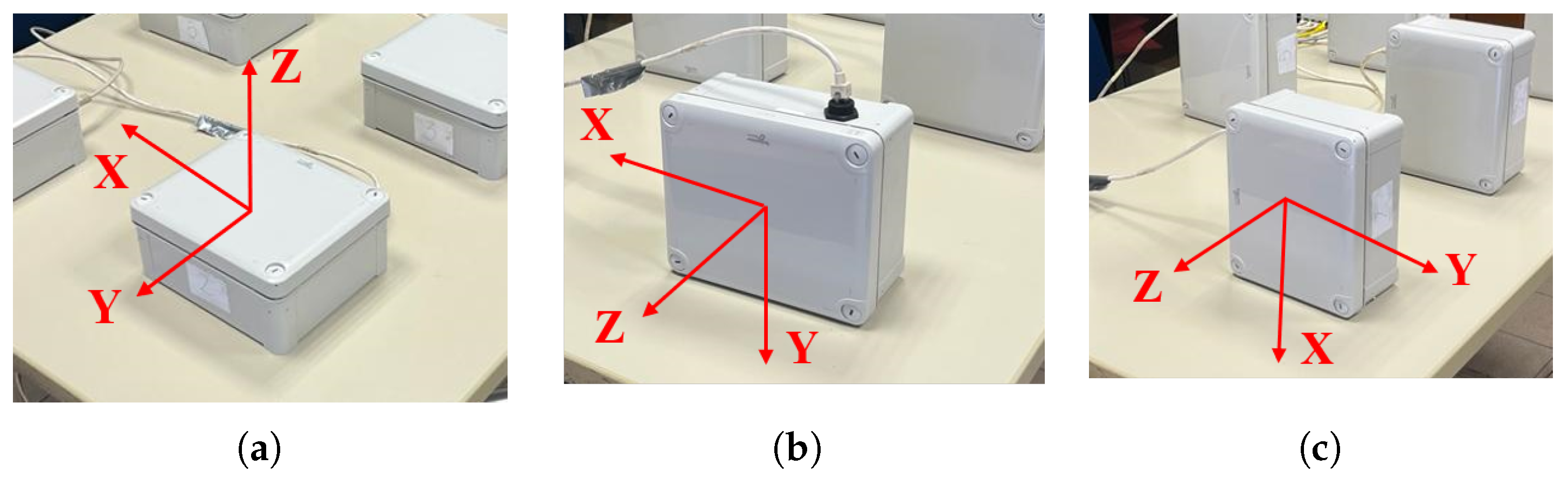
2.1. Sensor Nodes
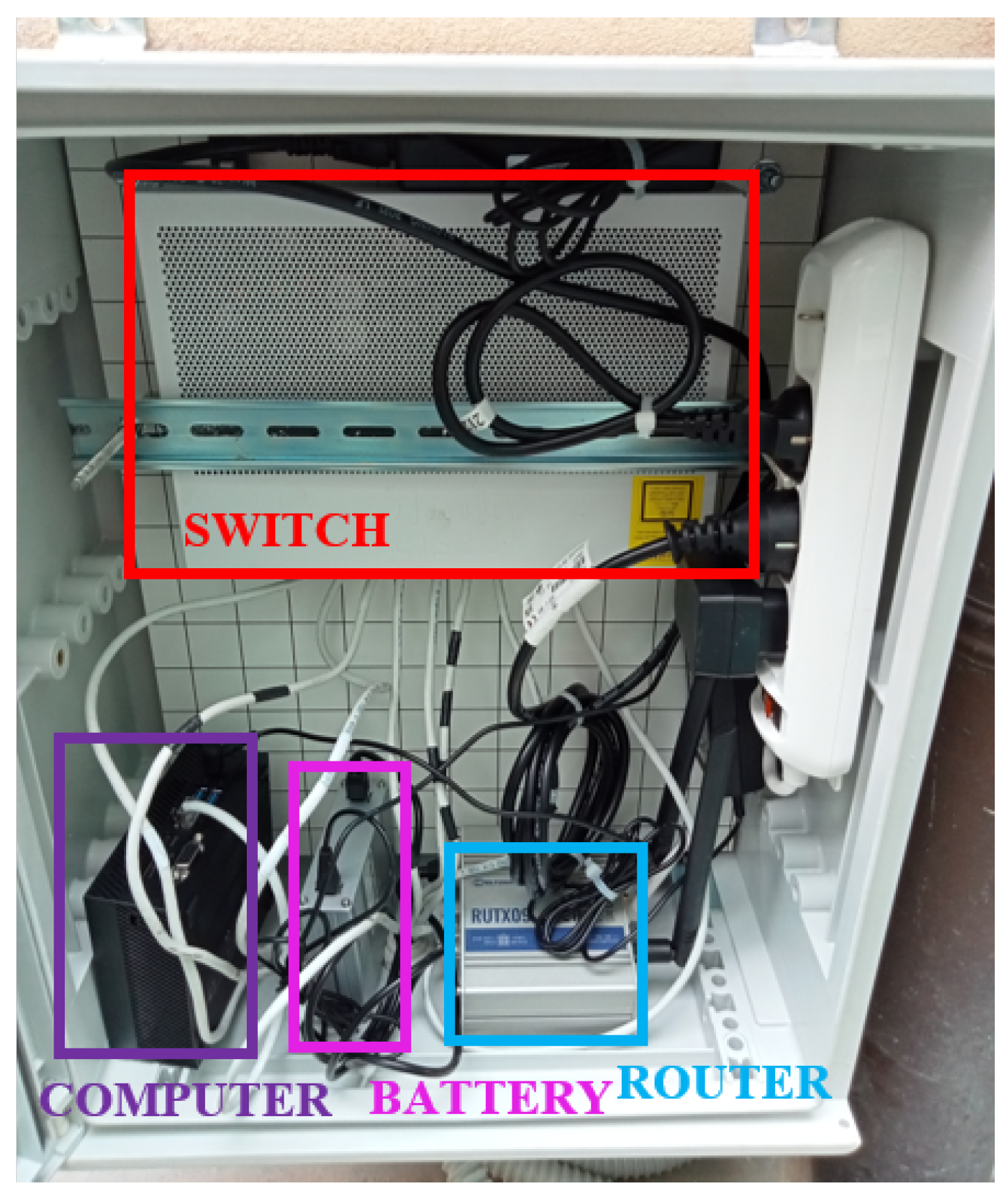
2.2. Hardware Architecture
2.3. Software Architecture
- Data collection and storage module: developed in Python, it helps data acquisition from sensors through an HTTP RESTFul API interface. Archiving is categorized based on data type:
- -
- Archived using system storage;
- -
- Stored in a NoSQL database (MongoDB).
- Data Optimization Module: crucial for preventing system errors when the data volume in system storage is high. This module, using Python V3.12 technology, prepares sensor-received data files into hourly archives and organizes them into sub-folders based on archiving time (year, week of the year), thereby reducing the data count within the same directory.
- Data loading module: implemented to prevent saturation of the acquisition server’s memory, this module uploads sensor data files to the Cloud, organized by the preceding module. Python was employed to create the module, and AWS S3 serves as the Cloud Storage service.
- Data processing and user management module: to make data accessible through a web interface, a Web Server application was developed in Java Springboot technology. This module can communicate with data storage systems to process them for visualization as graphs and is accessible through a RESTful HTTP API interface [38].
- Graphic display module: implemented in ReactJ’s front-end technology, this module provides the actual website accessible externally for consulting data.
3. Experimental Performance and Validation
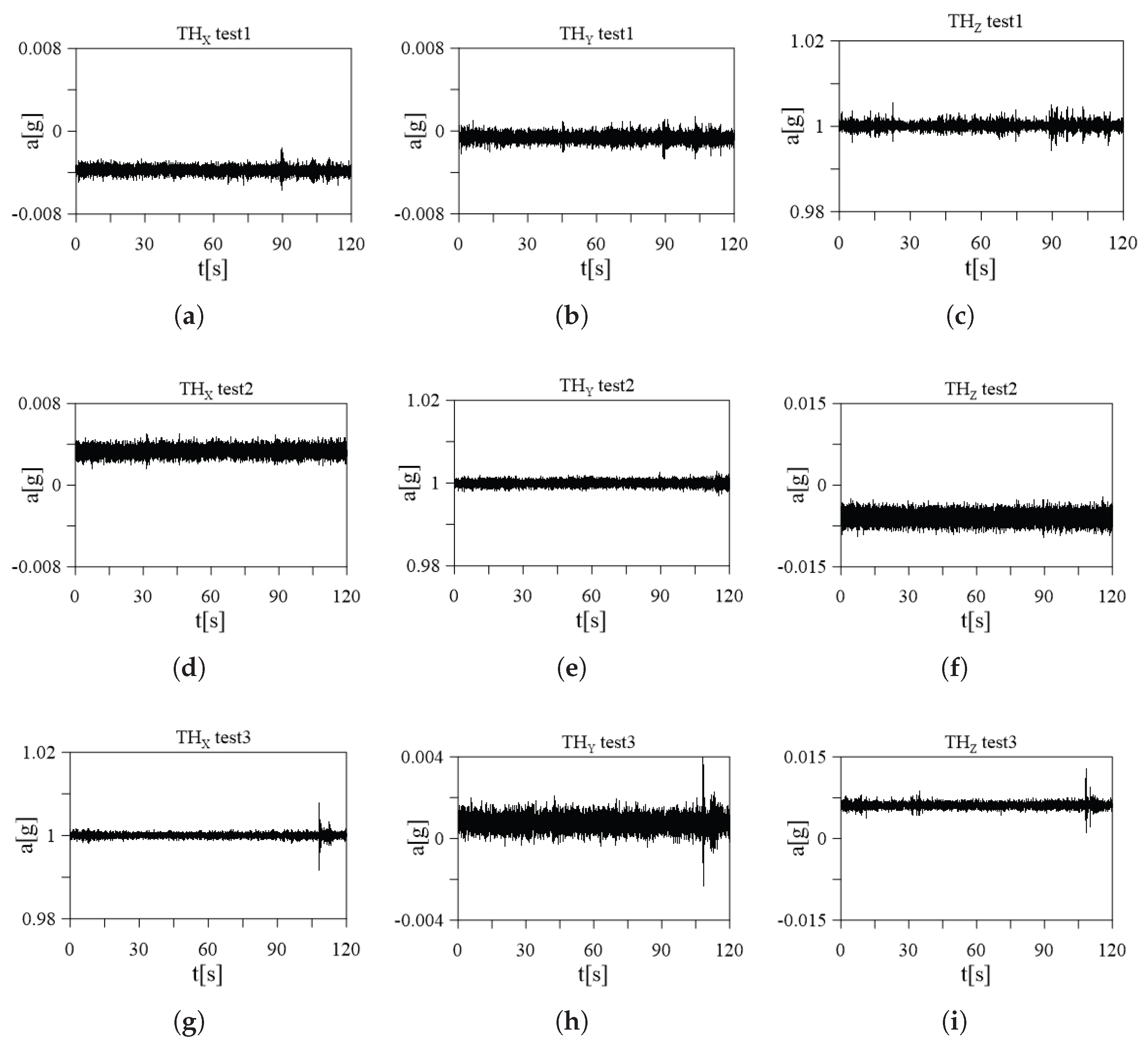
3.1. Static Testing and Calibration of the Sensors
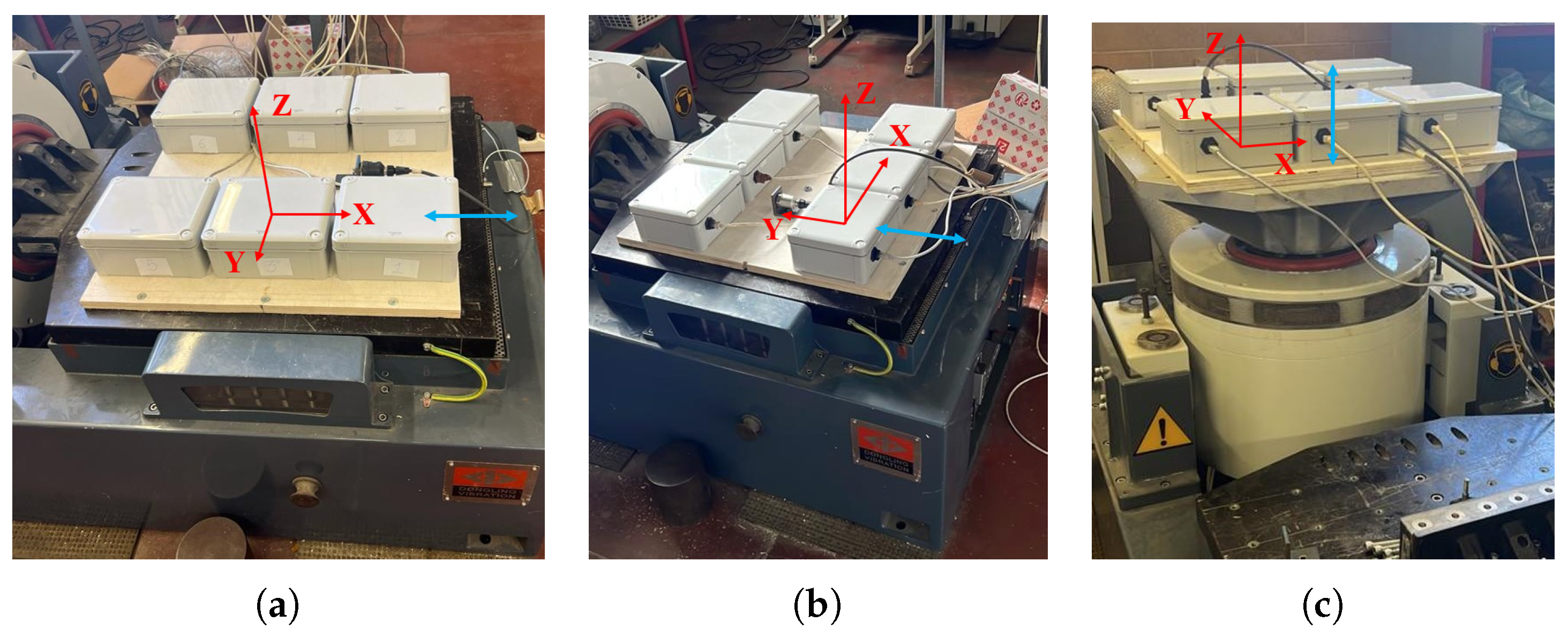
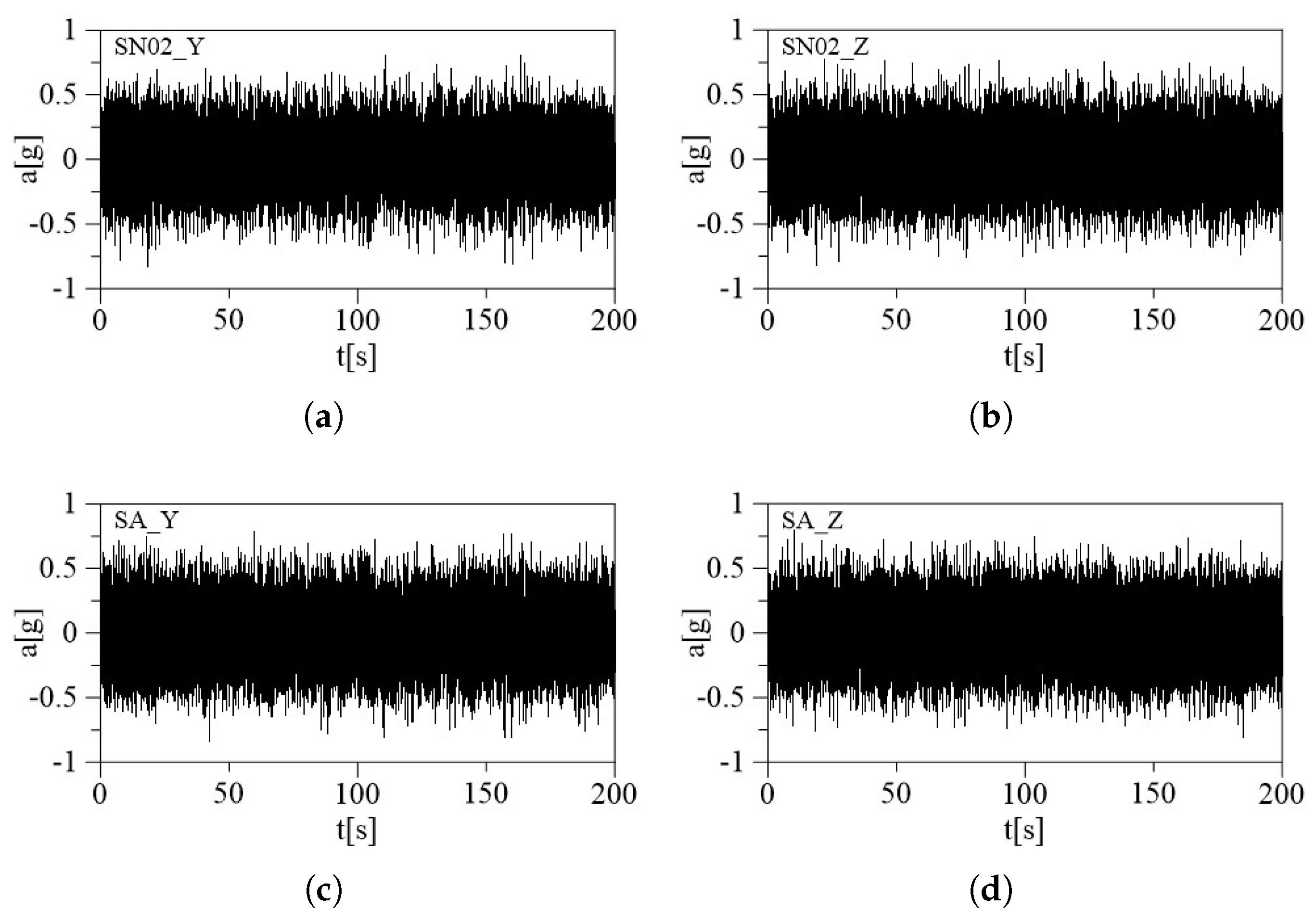
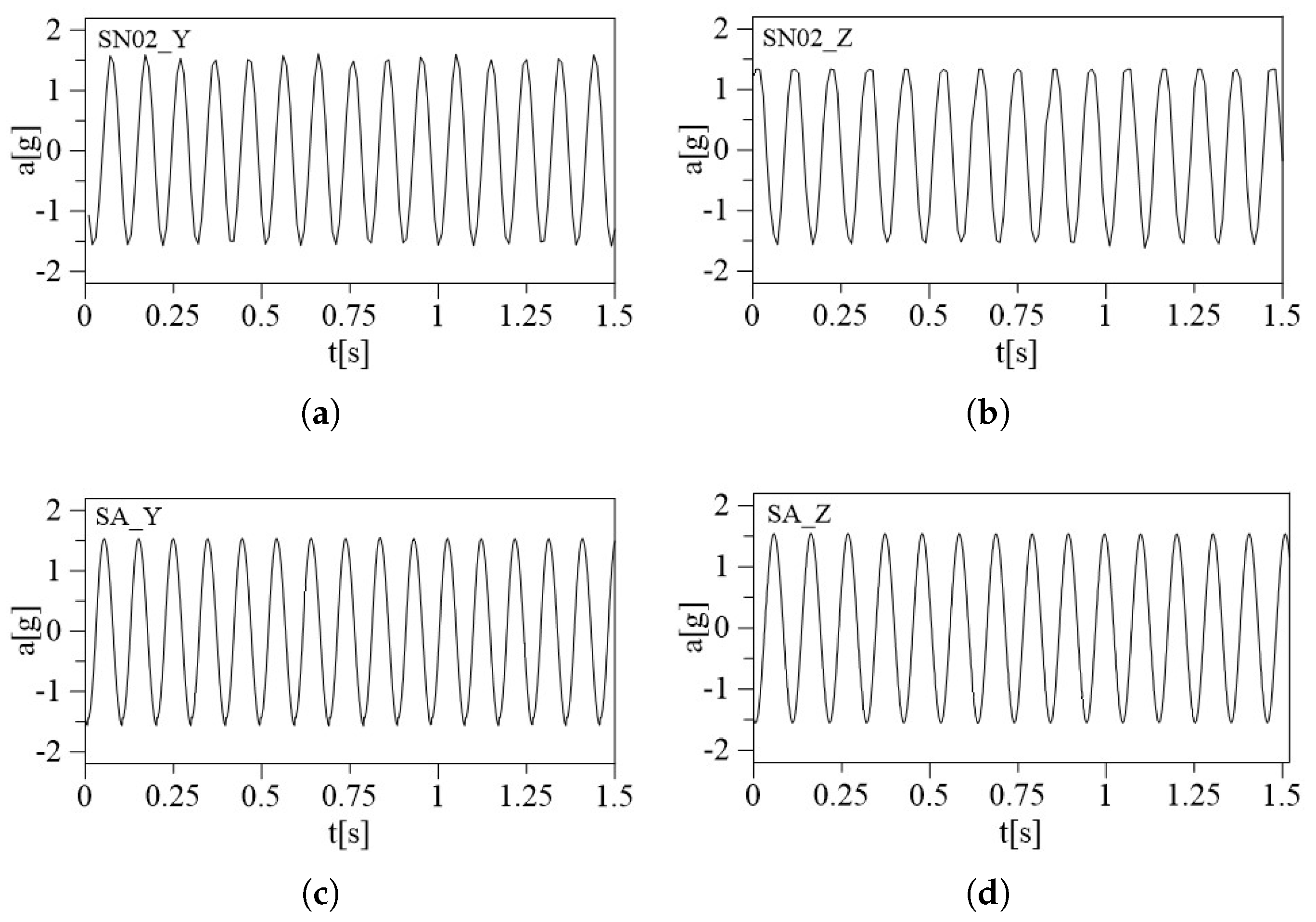
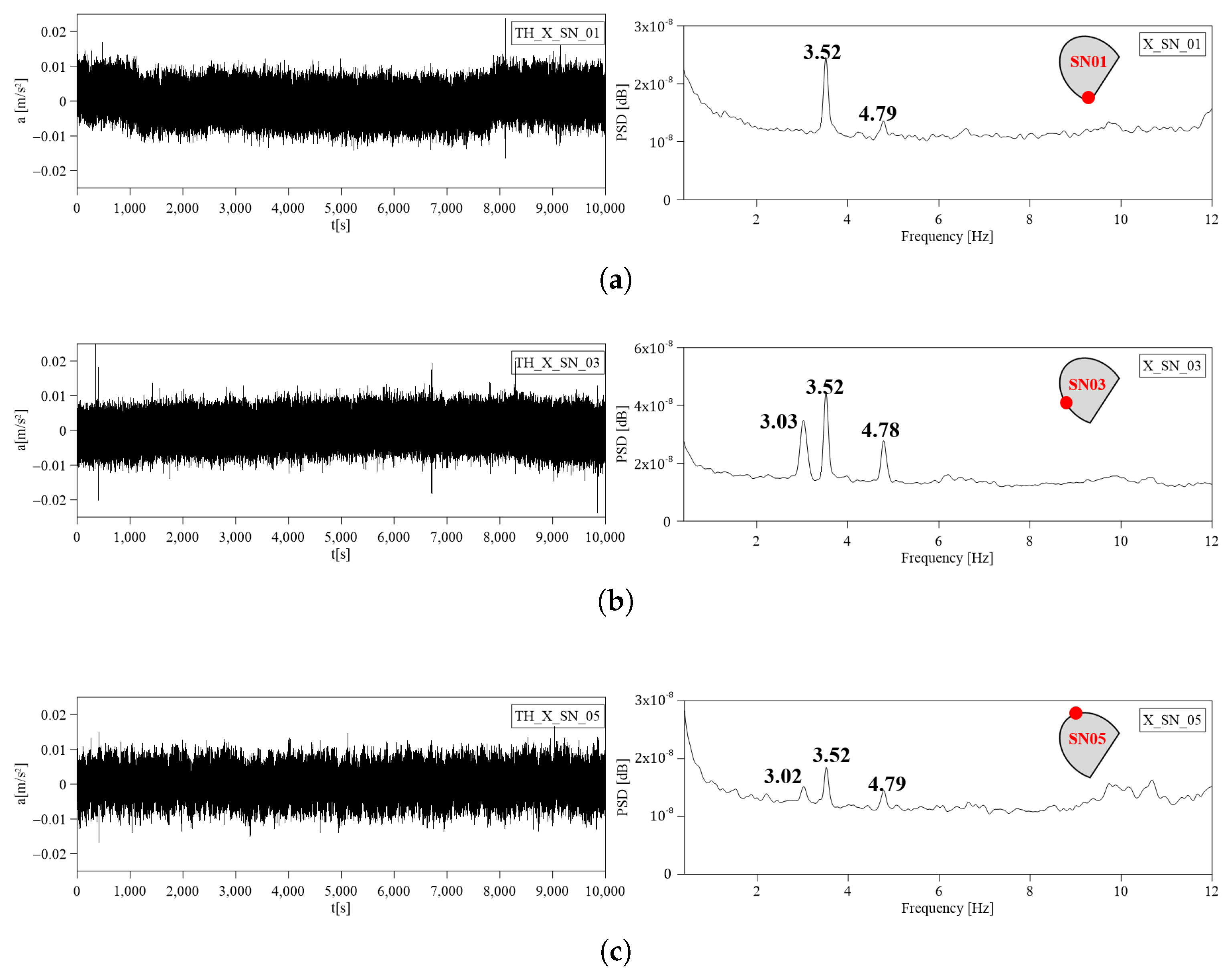
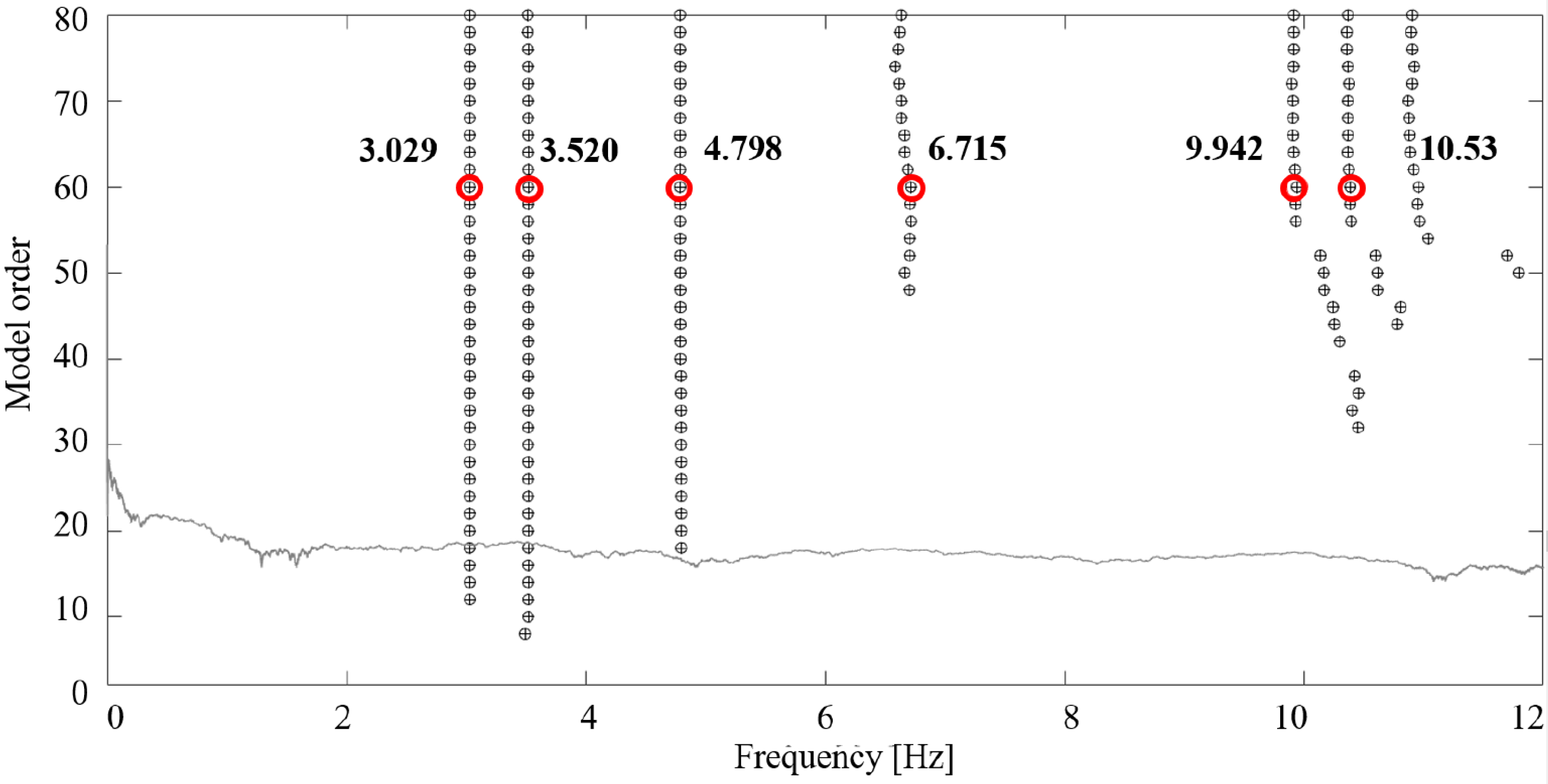
3.2. Dynamic Testing
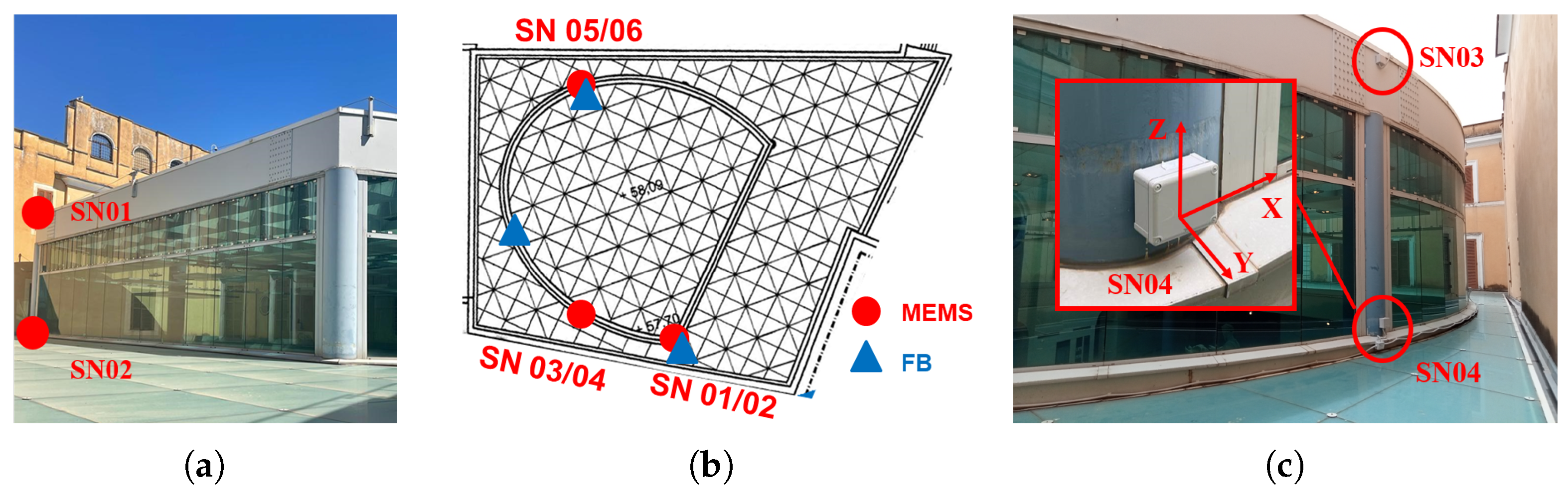
4. Validation on a Real Case Study
Comparison with Commercial Technology
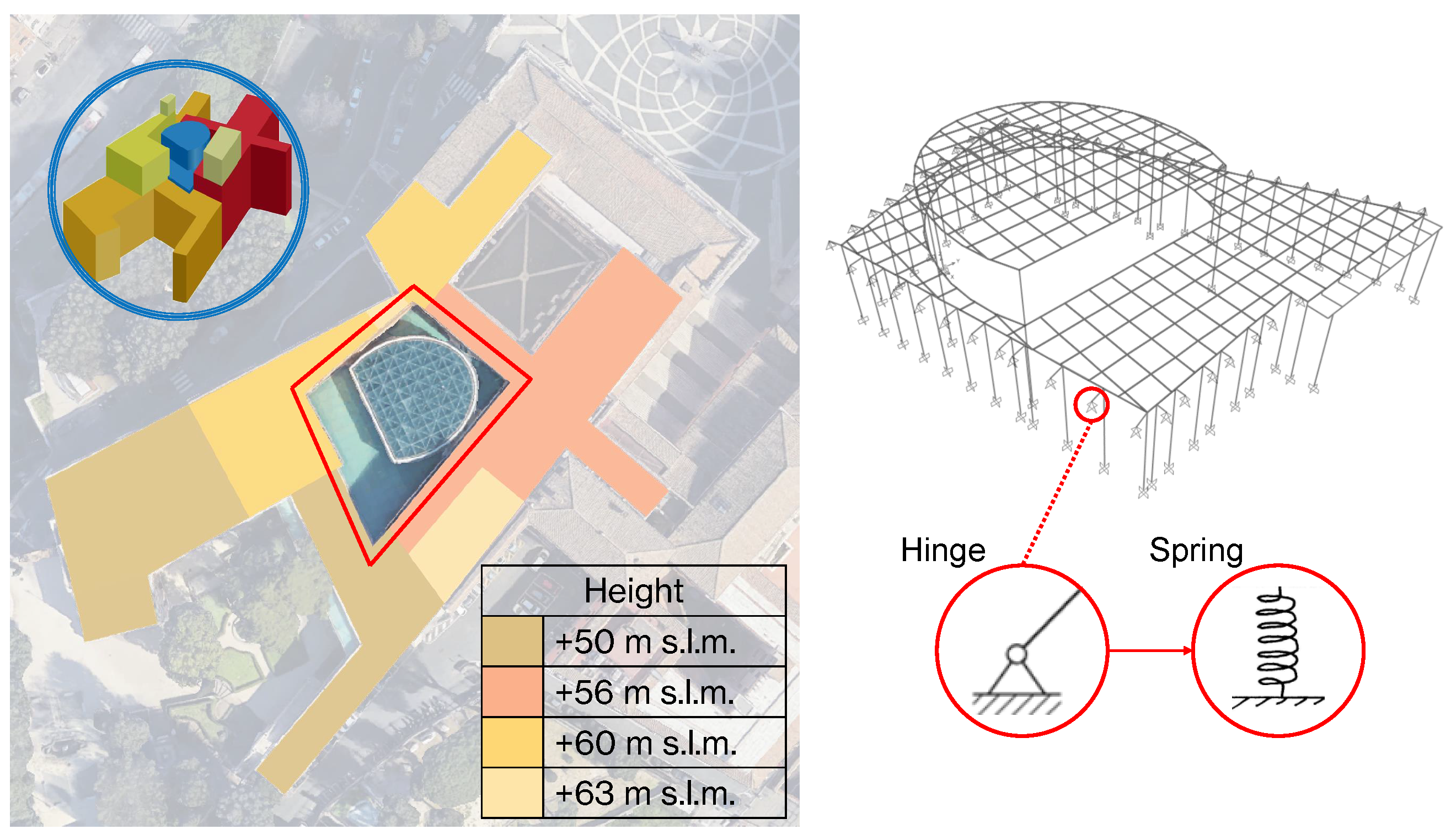
5. Validation of Data through Their Use in FEM Model Updating
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Preethichandra, D.; Suntharavadivel, T.; Kalutara, P.; Piyathilaka, L.; Izhar, U. Influence of Smart Sensors on Structural Health Monitoring Systems and Future Asset Management Practices. Sensors 2023, 23, 8279. [Google Scholar] [CrossRef] [PubMed]
- Rinaldi, C.; Lepidi, M.; Potenza, F.; Gattulli, V. Identification of cable tension through physical models and non-contact measurements. Mech. Syst. Signal Process. 2023, 205, 110867. [Google Scholar] [CrossRef]
- Crognale, M.; De Iuliis, M.; Rinaldi, C.; Gattulli, V. Damage detection with image processing: A comparative study. Earthq. Eng. Eng. Vib. 2023, 22, 333–345. [Google Scholar] [CrossRef]
- Sonbul, O.S.; Rashid, M. Towards the Structural Health Monitoring of Bridges Using Wireless Sensor Networks: A Systematic Study. Sensors 2023, 23, 8468. [Google Scholar] [CrossRef] [PubMed]
- Deng, Y.; Zhao, Y.; Ju, H.; Yi, T.H.; Li, A. Abnormal data detection for structural health monitoring: State-of-the-art review. Dev. Built Environ. 2024, 17, 100337. [Google Scholar] [CrossRef]
- Bado, M.F.; Tonelli, D.; Poli, F.; Zonta, D.; Casas, J.R. Digital twin for civil engineering systems: An exploratory review for distributed sensing updating. Sensors 2022, 22, 3168. [Google Scholar] [CrossRef] [PubMed]
- Toscani, A.; Rocchi, N.; Pinardi, D.; Binelli, M.; Saccenti, L.; Farina, A.; Pavoni, S.; Vanali, M. Low-Cost Condition Monitoring System for Smart Buildings and Industrial Applications. IEEE Trans. Ind. Appl. 2024, 60, 1870–1878. [Google Scholar] [CrossRef]
- Li, H.; Ou, J.; Zhao, X.; Zhou, W.; Li, H.; Zhou, Z.; Yang, Y. Structural health monitoring system for the Shandong Binzhou Yellow River highway bridge. Comput.-Aided Civ. Infrastruct. Eng. 2006, 21, 306–317. [Google Scholar] [CrossRef]
- Gattulli, V.; Lofrano, E.; Paolone, A.; Potenza, F. Measured properties of structural damping in railway bridges. J. Civ. Struct. Health Monit. 2019, 9, 639–653. [Google Scholar] [CrossRef]
- Ghannadi, P.; Kourehli, S.; Nguyen, A. The Differential Evolution Algorithm: An Analysis of More than Two Decades of Application in Structural Damage Detection (2001–2022). In Data Driven Methods for Civil Structural Health Monitoring and Resilience; CRC Press: Boca Raton, FL, USA, 2023; pp. 14–57. [Google Scholar]
- Albarbar, A.; Badri, A.; Sinha, J.K.; Starr, A. Performance evaluation of MEMS accelerometers. Measurement 2009, 42, 790–795. [Google Scholar] [CrossRef]
- Shajihan, S.A.V.; Chow, R.; Mechitov, K.; Fu, Y.; Hoang, T.; Spencer, B.F. Development of synchronized high-sensitivity wireless accelerometer for structural health monitoring. Sensors 2020, 20, 4169. [Google Scholar] [CrossRef] [PubMed]
- Magdaleno, A.; Villacorta, J.J.; Del-Val, L.; Izquierdo, A.; Lorenzana, A. Measurement of acceleration response functions with scalable low-cost devices. An application to the experimental modal analysis. Sensors 2021, 21, 6637. [Google Scholar] [CrossRef] [PubMed]
- Spencer Jr, B.; Ruiz-Sandoval, M.E.; Kurata, N. Smart sensing technology: Opportunities and challenges. Struct. Control Health Monit. 2004, 11, 349–368. [Google Scholar] [CrossRef]
- Sony, S.; Laventure, S.; Sadhu, A. A literature review of next-generation smart sensing technology in structural health monitoring. Struct. Control Health Monit. 2019, 26, e2321. [Google Scholar] [CrossRef]
- Straser, E.; Kiremidjian, A.; Meng, T.; Redlefsen, L. A modular, wireless network platform for monitoring structures. Proc.-Spie Int. Soc. Opt. Eng. 1998, 1, 450–456. [Google Scholar] [CrossRef]
- Straser, E.; Kiremidjian, A. A modular visual approach to damage monitoring for civil structures. In Proceedings of the SPIE v2719, Smart Structures and Materials; SPIE: Philadelphia, PA, USA, 1996; Volume 96, pp. 112–122. [Google Scholar]
- Pakzad, S.N.; Fenves, G.L. Statistical analysis of vibration modes of a suspension bridge using spatially dense wireless sensor network. J. Struct. Eng. 2009, 135, 863–872. [Google Scholar] [CrossRef]
- Zanelli, F.; Debattisti, N.; Mauri, M.; Argentino, A.; Belloli, M. Development and Field Validation of Wireless Sensors for Railway Bridge Modal Identification. Appl. Sci. 2023, 13, 3620. [Google Scholar] [CrossRef]
- Federici, F.; Graziosi, F.; Faccio, M.; Colarieti, A.; Gattulli, V.; Lepidi, M.; Potenza, F. An integrated approach to the design of wireless sensor networks for structural health monitoring. Int. J. Distrib. Sens. Netw. 2012, 8, 594842. [Google Scholar] [CrossRef]
- Vincenzo, G.; Potenza, F.; Graziosi, F.; Federici, F.; Colarieti, A.; Faccio, M. Distributed structural monitoring for a smart city in a seismic area. Key Eng. Mater. 2015, 628, 123–135. [Google Scholar]
- Potenza, F.; Federici, F.; Lepidi, M.; Gattulli, V.; Graziosi, F.; Colarieti, A. Long-term structural monitoring of the damaged Basilica S. Maria di Collemaggio through a low-cost wireless sensor network. J. Civ. Struct. Health Monit. 2015, 5, 655–676. [Google Scholar] [CrossRef]
- Federici, F.; Alesii, R.; Colarieti, A.; Faccio, M.; Graziosi, F.; Gattulli, V.; Potenza, F. Design of wireless sensor nodes for structural health monitoring applications. Procedia Eng. 2014, 87, 1298–1301. [Google Scholar] [CrossRef]
- Ribeiro, R.R.; Lameiras, R.d.M. Evaluation of low-cost MEMS accelerometers for SHM: Frequency and damping identification of civil structures. Lat. Am. J. Solids Struct. 2019, 16, e203. [Google Scholar] [CrossRef]
- Khalid, N.; Mirzavand, R.; Iyer, A.K. A survey on battery-less RFID-based wireless sensors. Micromachines 2021, 12, 819. [Google Scholar] [CrossRef] [PubMed]
- Girolami, A.; Zonzini, F.; De Marchi, L.; Brunelli, D.; Benini, L. Modal analysis of structures with low-cost embedded systems. In Proceedings of the 2018 IEEE International Symposium on Circuits and Systems (ISCAS), Florence, Italy, 27–30 May 2018; pp. 1–4. [Google Scholar]
- Krishnamurthy, V.; Fowler, K.; Sazonov, E. The effect of time synchronization of wireless sensors on the modal analysis of structures. Smart Mater. Struct. 2008, 17, 055018. [Google Scholar] [CrossRef]
- Malik, H.; Khattak, K.S.; Wiqar, T.; Khan, Z.H.; Altamimi, A.B. Low cost internet of things platform for structural health monitoring. In Proceedings of the 2019 22nd International Multitopic Conference (INMIC), Islamabad, Pakistan, 29–30 November 2019; pp. 1–7. [Google Scholar]
- Plaza, J.A.; Collado, A.; Cabruja, E.; Esteve, J. Piezoresistive accelerometers for MCM package. J. Microelectromech. Syst. 2002, 11, 794–801. [Google Scholar] [CrossRef]
- Xie, H.; Fedder, G.K. A CMOS z-axis capacitive accelerometer with comb-finger sensing. In Proceedings of the IEEE Thirteenth Annual International Conference on Micro Electro Mechanical Systems (Cat. No. 00CH36308), Miyazaki, Japan, 23–27 January 2000; pp. 496–501. [Google Scholar]
- Yazdi, N.; Ayazi, F.; Najafi, K. Micromachined inertial sensors. Proc. IEEE 1998, 86, 1640–1659. [Google Scholar] [CrossRef]
- Seshia, A.A.; Palaniapan, M.; Roessig, T.A.; Howe, R.T.; Gooch, R.W.; Schimert, T.R.; Montague, S. A vacuum packaged surface micromachined resonant accelerometer. J. Microelectromech. Syst. 2002, 11, 784–793. [Google Scholar] [CrossRef]
- Gao, R.; Zhang, L. Micromachined microsensors for manufacturing. IEEE Instrum. Meas. Mag. 2004, 7, 20–26. [Google Scholar] [CrossRef]
- Zhu, L.; Fu, Y.; Chow, R.; Spencer Jr, B.F.; Park, J.W.; Mechitov, K. Development of a high-sensitivity wireless accelerometer for structural health monitoring. Sensors 2018, 18, 262. [Google Scholar] [CrossRef]
- D’Errico, L.; Franchi, F.; Graziosi, F.; Marotta, A.; Rinaldi, C.; Boschi, M.; Colarieti, A. Structural Health Monitoring and Earthquake Early Warning on 5G uRLLC Network. In Proceedings of the 2019 IEEE 5th World Forum on Internet of Things (WF-IoT), Limerick, Ireland, 15–18 April 2019; pp. 783–786. [Google Scholar] [CrossRef]
- Franchi, F.; Marotta, A.; Rinaldi, C.; Graziosi, F.; Fratocchi, L.; Parisse, M. What can 5g do for public safety? structural health monitoring and earthquake early warning scenarios. Sensors 2022, 22, 3020. [Google Scholar] [CrossRef]
- Gattulli, V.; Franchi, F.; Graziosi, F.; Marotta, A.; Rinaldi, C.; Potenza, F.; Sabatino, U.D. Design and evaluation of 5G-based architecture supporting data-driven digital twins updating and matching in seismic monitoring. Bull. Earthq. Eng. 2022, 20, 4345–4365. [Google Scholar] [CrossRef]
- Masse, M. REST API Design Rulebook: Designing Consistent RESTful Web Service Interfaces; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2011. [Google Scholar]
- Jaramillo, D.; Nguyen, D.V.; Smart, R. Leveraging microservices architecture by using Docker technology. In Proceedings of the SoutheastCon 2016, Norfolk, VA, USA, 30 March–3 April 2016; pp. 1–5. [Google Scholar]
- Reynders, E.; Schevenels, M.; De Roeck, G. MACEC 3.3: A Matlab Toolbox for Experimental and Operational Modal Analysis; Department of Civil Engineering, KU Leuven: Leuven, Belgium, 2014. [Google Scholar]
- Crognale, M.; Potenza, F.; Gattulli, V. Fatigue Damage Identification by a Global-Local Integrated Procedure for Truss-Like Steel Bridges. Struct. Control Health Monit. 2023, 2023, 9594308. [Google Scholar] [CrossRef]
- Peeters, B.; De Roeck, G. Reference-based stochastic subspace identification for output-only modal analysis. Mech. Syst. Signal Process. 1999, 13, 855–878. [Google Scholar] [CrossRef]
- Peeters, B.; De Roeck, G. Reference based stochastic subspace identification in civil engineering. Inverse Probl. Eng. 2000, 8, 47–74. [Google Scholar] [CrossRef]
- De Iuliis, M.; Crognale, M.; Potenza, F.; Gattulli, V. On the combined use of satellite and on-site information for monitoring anomalous trends in structures within cultural heritage sites. J. Civ. Struct. Health Monit. 2024, 1–18. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors ID | X-Offset | X-Scale | Y-Offset | Y-Scale | Z-Offset | Z-Scale |
|---|---|---|---|---|---|---|
| SN01 | 1.8285 | −0.8119 | 1.8121 | −0.8036 | 1.8743 | 0.7613 |
| SN02 | 1.8600 | −0.8515 | 1.8387 | −0.8411 | 1.8868 | 0.7953 |
| SN03 | 1.8538 | −0.8431 | 1.8359 | −0.8286 | 1.8991 | 0.7730 |
| SN04 | 1.8251 | −0.8200 | 1.8118 | −0.8150 | 1.8824 | 0.7472 |
| SN05 | 1.8301 | −0.8227 | 1.8297 | −0.8095 | 1.8905 | 0.7669 |
| SN06 | 1.8552 | −0.8445 | 1.8366 | −0.8322 | 1.9107 | 0.7718 |
| Sensors’ID | Y-StD Ref. | Y-StD MEMS | Y-StD [%] | Z-StD Ref. | Z-StD MEMS | Z-StD [%] |
|---|---|---|---|---|---|---|
| SN01 | 0.2097 | 0.2059 | −1.82 | 0.2106 | 0.2159 | 2.47 |
| SN02 | 0.2095 | 0.2161 | 3.04 | 0.2105 | 0.2238 | 5.92 |
| SN03 | 0.2097 | 0.2114 | 0.79 | 0.2106 | 0.2206 | 4.52 |
| SN04 | 0.2097 | 0.2087 | −0.46 | 0.2105 | 0.2122 | 0.78 |
| SN05 | 0.2102 | 0.2070 | −1.53 | 0.2106 | 0.2154 | 2.22 |
| SN06 | 0.2097 | 0.2133 | 1.65 | 0.2105 | 0.2152 | 2.17 |
| Sensors’ID | Y-StD Ref. | Y-StD MEMS | Y-StD [%] | Z-StD Ref. | Z-StD MEMS | Z-StD [%] |
|---|---|---|---|---|---|---|
| SN01 | 1.0669 | 1.0499 | −1.62 | 1.0733 | 1.0426 | −2.94 |
| SN02 | 1.0669 | 1.1032 | 3.29 | 1.0737 | 1.0767 | 0.28 |
| SN03 | 1.0660 | 1.0781 | 1.12 | 1.0737 | 1.0604 | −1.26 |
| SN04 | 1.0660 | 1.0622 | −0.35 | 1.0733 | 1.0269 | −4.52 |
| SN05 | 1.0661 | 1.0506 | −1.47 | 1.0727 | 1.0362 | −3.52 |
| SN06 | 1.0660 | 1.0840 | 1.66 | 1.0737 | 1.0089 | −6.42 |
| SN01 | SN02 | SN03 | SN04 | SN05 | SN06 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 3.02 | 3.01 | - | 3.02 | - | 3.02 | - | 3.03 | 3.03 | 3.03 | 3.02 | 3.03 | |
| 3.51 | - | 3.51 | - | 3.52 | - | 3.53 | - | 3.52 | 3.51 | 3.53 | 3.50 | |
| 4.79 | 4.80 | 4.77 | - | 4.77 | - | - | - | 4.79 | 4.45 | 4.78 | - | |
| 6.77 | 6.39 | - | - | - | - | - | - | - | - | - | - | |
| - | - | - | - | - | - | - | 9.65 | - | 9.57 | - | - | |
| - | - | - | 10.77 | - | 10.40 | - | - | - | 10.65 | - | 10.69 | |
| All 12 | 3.04 | 3.54 | - | - | - | - |
| Ref. , , | 3.04 | 3.53 | 4.83 | 6.73 | 10.22 | 10.59 |
| Ref. , | - | 3.49 | - | - | - | 10.43 |
| Ref. , | 3.03 | 3.52 | 4.82 | 6.81 | 10.05 | 10.68 |
| Ref. , | 3.03 | 3.52 | 4.79 | 6.76 | 9.87 | 10.56 |
| Ref. | 3.03 | 3.52 | 4.79 | 6.76 | 9.87 | 10.37 |
| Ref. | - | 3.52 | 4.76 | 6.74 | 9.97 | 10.51 |
| Ref. | 3.03 | 3.52 | 4.80 | - | 9.99 | 10.54 |
| All 6 | 3.00 | 3.51 | - | - | - | 10.64 |
| Ref. , , | 3.03 | 3.53 | 4.82 | 6.72 | - | 10.64 |
| Ref. , | 3.02 | 3.52 | 4.80 | 6.65 | 9.99 | 10.73 |
| Ref. , | 3.03 | 3.520 | 4.81 | 6.73 | 9.95 | 10.41 |
| Ref. , | 3.02 | 3.51 | 4.80 | 6.72 | 9.96 | 10.58 |
| Ref. | 3.03 | 3.52 | 4.80 | 6.71 | 9.94 | 10.53 |
| Ref. | - | 3.52 | 4.76 | 6.73 | - | 10.31 |
| Ref. | 3.03 | 3.52 | 4.79 | - | 10.71 | - |
| SN050 | SN051 | SN052 | SN054 | SN490 | SN491 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| N | E | N | E | N | E | N | E | N | E | N | E | |
| 3.05 | 3.05 | 2.99 | 2.99 | 2.99 | 2.8 | 2.92 | - | - | 2.99 | 2.99 | ||
| 3.47 | 3.54 | 3.54 | 3.54 | 3.54 | 3.54 | 3.54 | 3.66 | - | - | 3.47 | 3.47 | |
| 4.45 | - | - | - | 4.45 | 4.45 | - | - | - | - | - | - | |
| - | - | 4.51 | - | - | 4.51 | - | - | - | - | 4.51 | ||
| - | 4.76 | - | 4.76 | 4.76 | - | - | - | - | - | 4.76 | 4.76 | |
| 6.71 | 6.71 | - | - | - | 6.71 | - | - | - | - | 6.71 | 6.71 | |
| Ref SN050 | Ref SN051 | Ref SN052 | Ref All | |
|---|---|---|---|---|
| 3.04 | 3.06 | 3.01 | 3.07 | |
| 3.51 | 3.51 | 3.50 | 3.43 | |
| - | - | - | - | |
| 4.51 | - | - | - | |
| - | 4.82 | 4.81 | - | |
| - | - | 6.29 | - |
| 19 December 2022 | 14 July 2023 | |||||
|---|---|---|---|---|---|---|
| FB acc. | MEMS acc. | Difference | ||||
| SSI | PSD | SSI | PSD | SSI | PSD | |
| 3.043 | 2.974 | 3.029 | 3.023 | −0.46% | 1.65% | |
| 3.486 | 3.531 | 3.520 | 3.516 | 0.98% | −0.42% | |
| 4.821 | 4.760 | 4.798 | 4.737 | −0.48% | −0.48% | |
| 6.733 | 6.579 | 6.291 | 6.712 | −6.56% | 2.02% | |
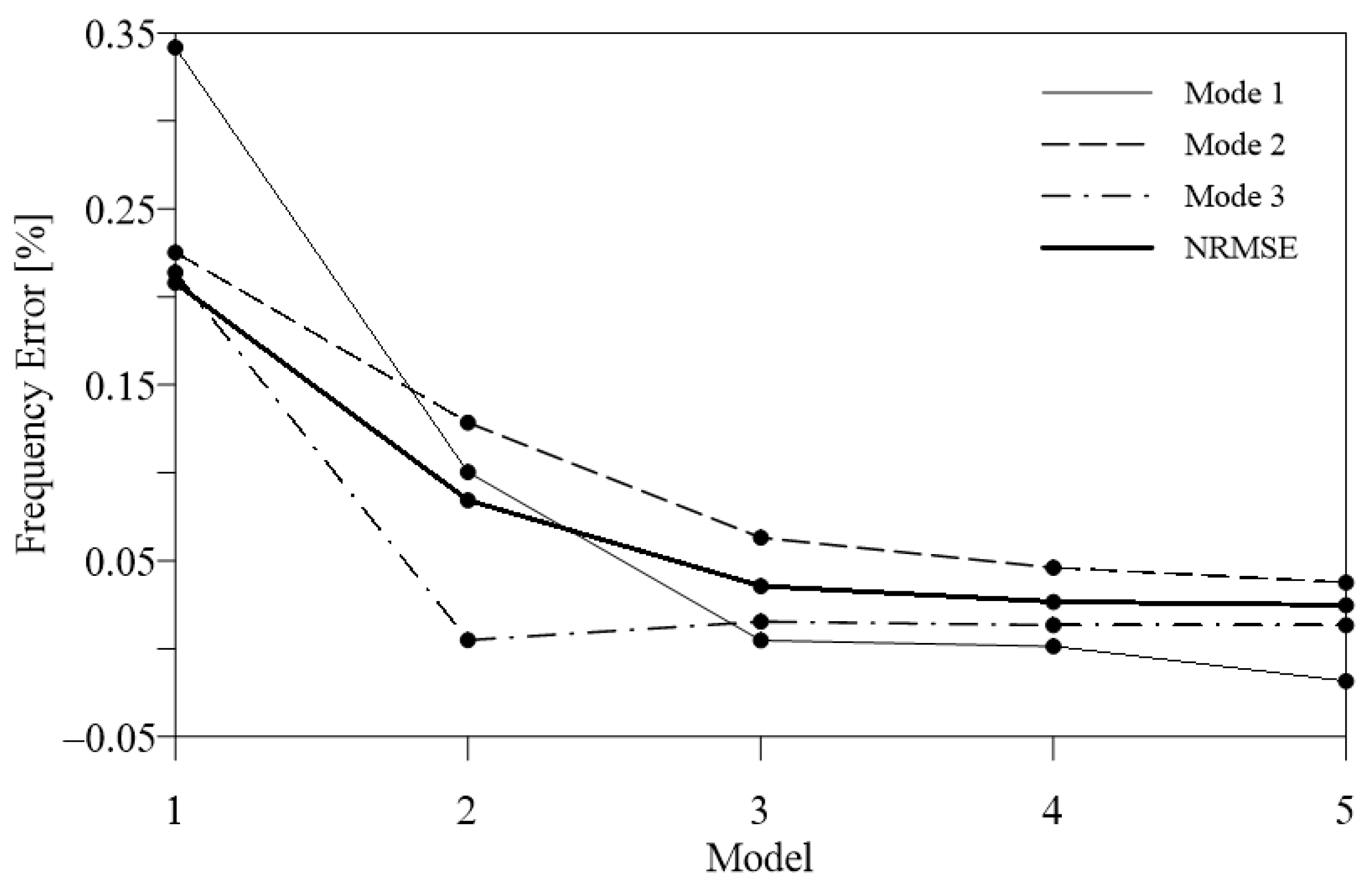
| Model | 1st Mode [Hz] | 2nd Mode [Hz] | 3rd Mode [Hz] | NRMSE |
|---|---|---|---|---|
| 1 | 4.06 | 4.31 | 5.75 | 0.2024 |
| 2 | 3.33 | 3.97 | 4.76 | 0.0783 |
| 3 | 3.04 | 3.74 | 4.81 | 0.0350 |
| 4 | 3.03 | 3.68 | 4.80 | 0.0262 |
| 5 | 2.97 | 3.65 | 4.80 | 0.0238 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Crognale, M.; Rinaldi, C.; Potenza, F.; Gattulli, V.; Colarieti, A.; Franchi, F. Developing and Testing High-Performance SHM Sensors Mounting Low-Noise MEMS Accelerometers. Sensors 2024, 24, 2435. https://doi.org/10.3390/s24082435
Crognale M, Rinaldi C, Potenza F, Gattulli V, Colarieti A, Franchi F. Developing and Testing High-Performance SHM Sensors Mounting Low-Noise MEMS Accelerometers. Sensors. 2024; 24(8):2435. https://doi.org/10.3390/s24082435
Chicago/Turabian StyleCrognale, Marianna, Cecilia Rinaldi, Francesco Potenza, Vincenzo Gattulli, Andrea Colarieti, and Fabio Franchi. 2024. "Developing and Testing High-Performance SHM Sensors Mounting Low-Noise MEMS Accelerometers" Sensors 24, no. 8: 2435. https://doi.org/10.3390/s24082435
APA StyleCrognale, M., Rinaldi, C., Potenza, F., Gattulli, V., Colarieti, A., & Franchi, F. (2024). Developing and Testing High-Performance SHM Sensors Mounting Low-Noise MEMS Accelerometers. Sensors, 24(8), 2435. https://doi.org/10.3390/s24082435