
Respiration and Heart Rate Monitoring in Smart Homes: An Angular-Free Approach with an FMCW Radar

 , ,
, ,  and
and 
Abstract
:1. Introduction
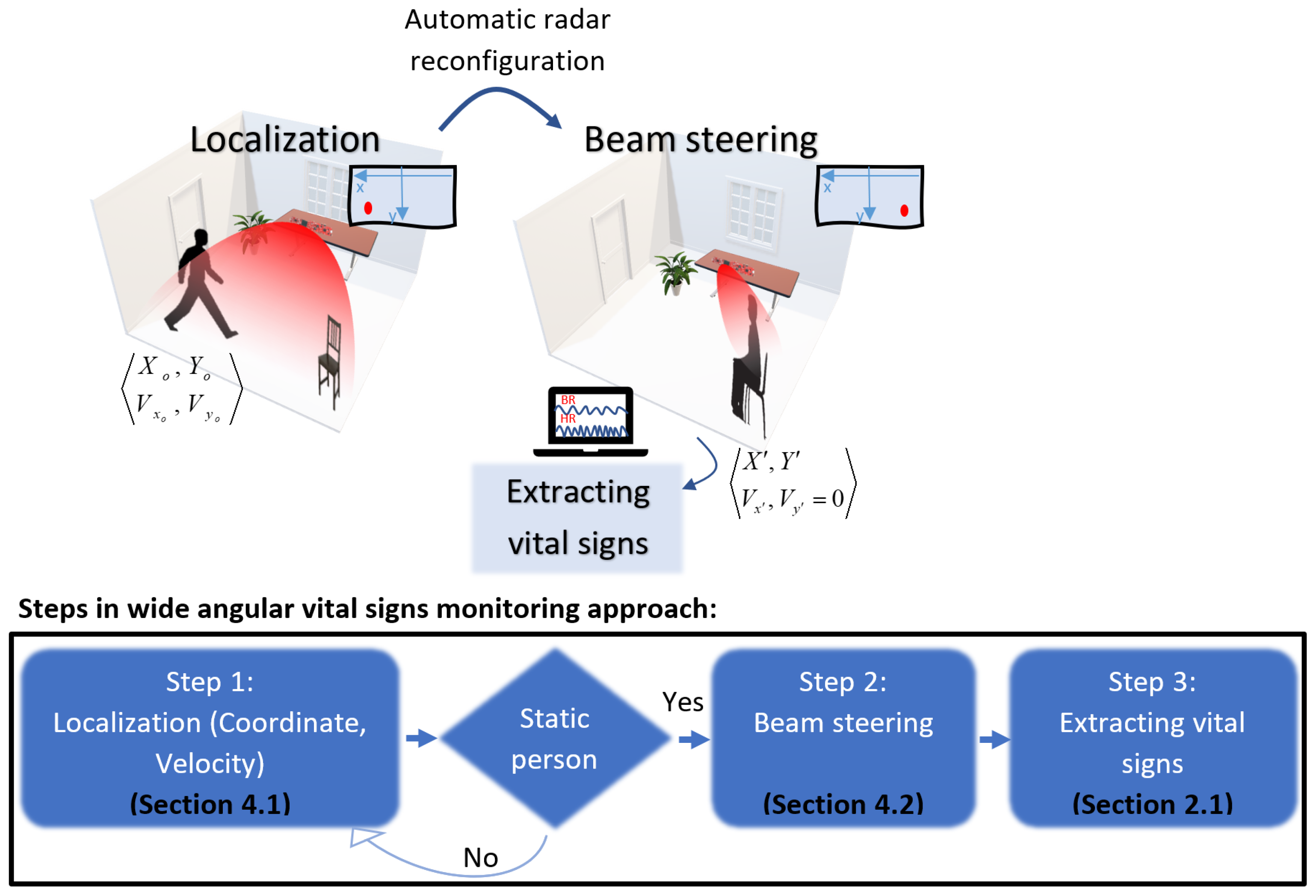
2. Proposed Approach: Capturing Vital Signs across Wide Angles
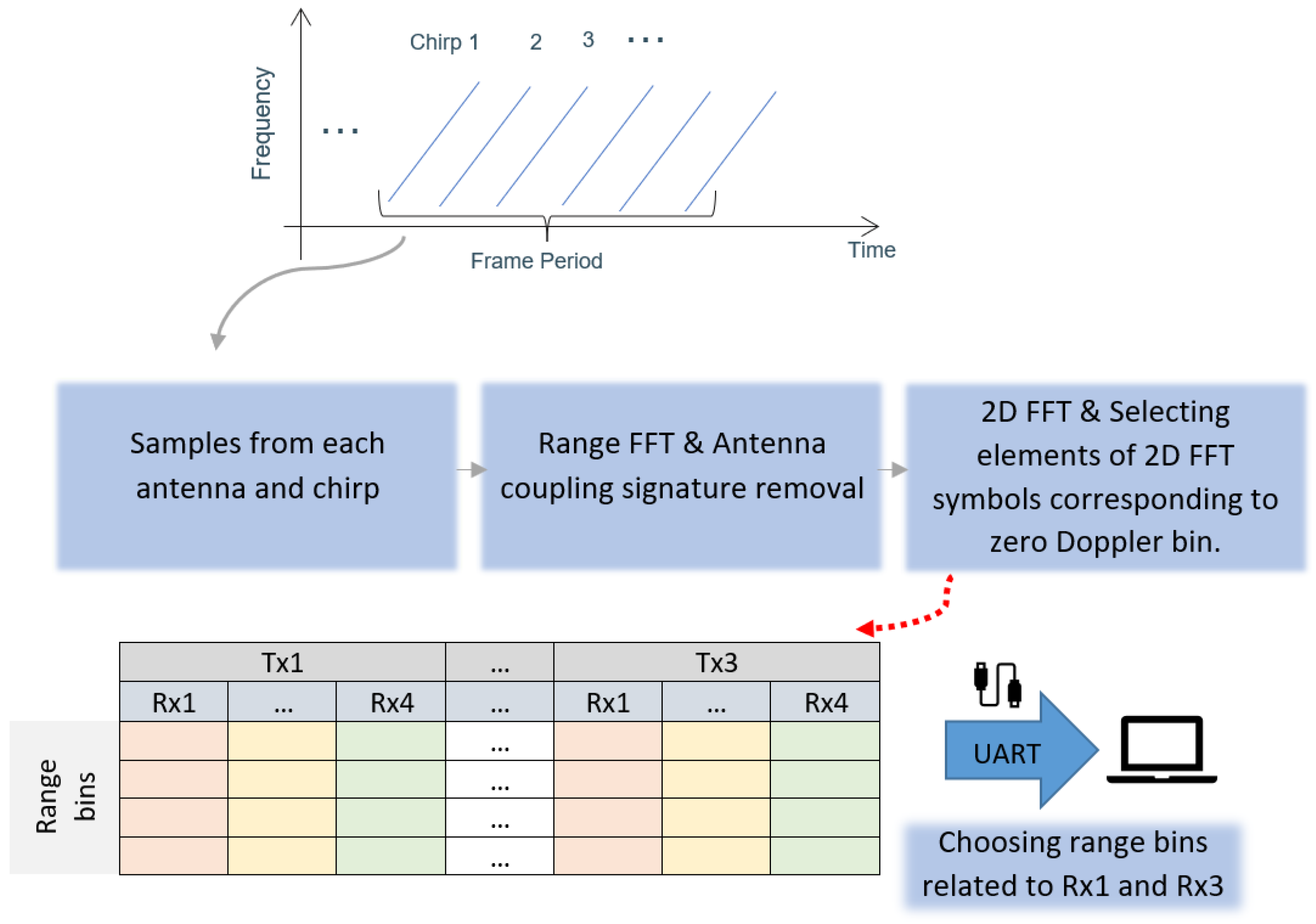
2.1. The Processing Pipeline for Extracting Vital Signs
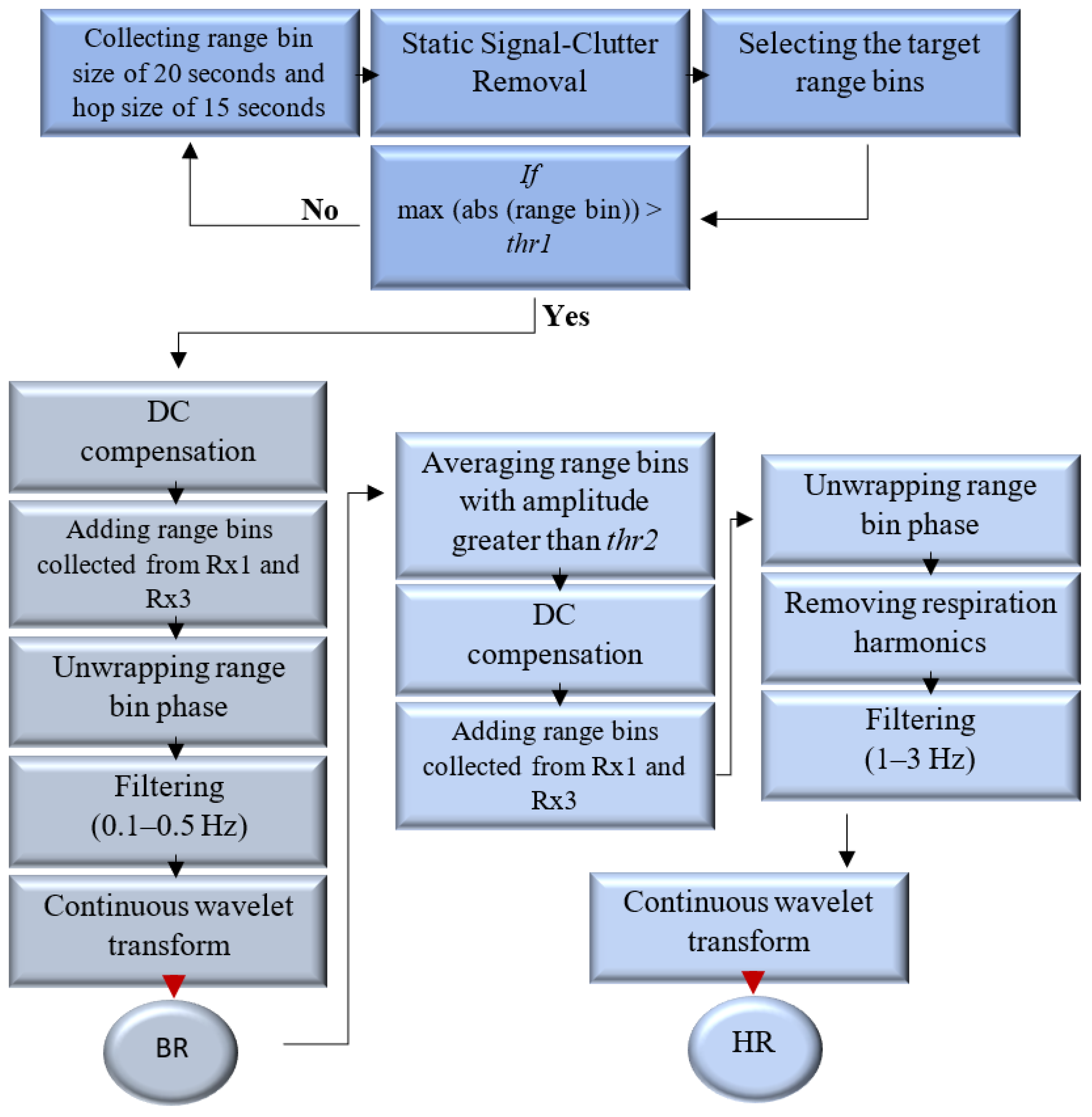
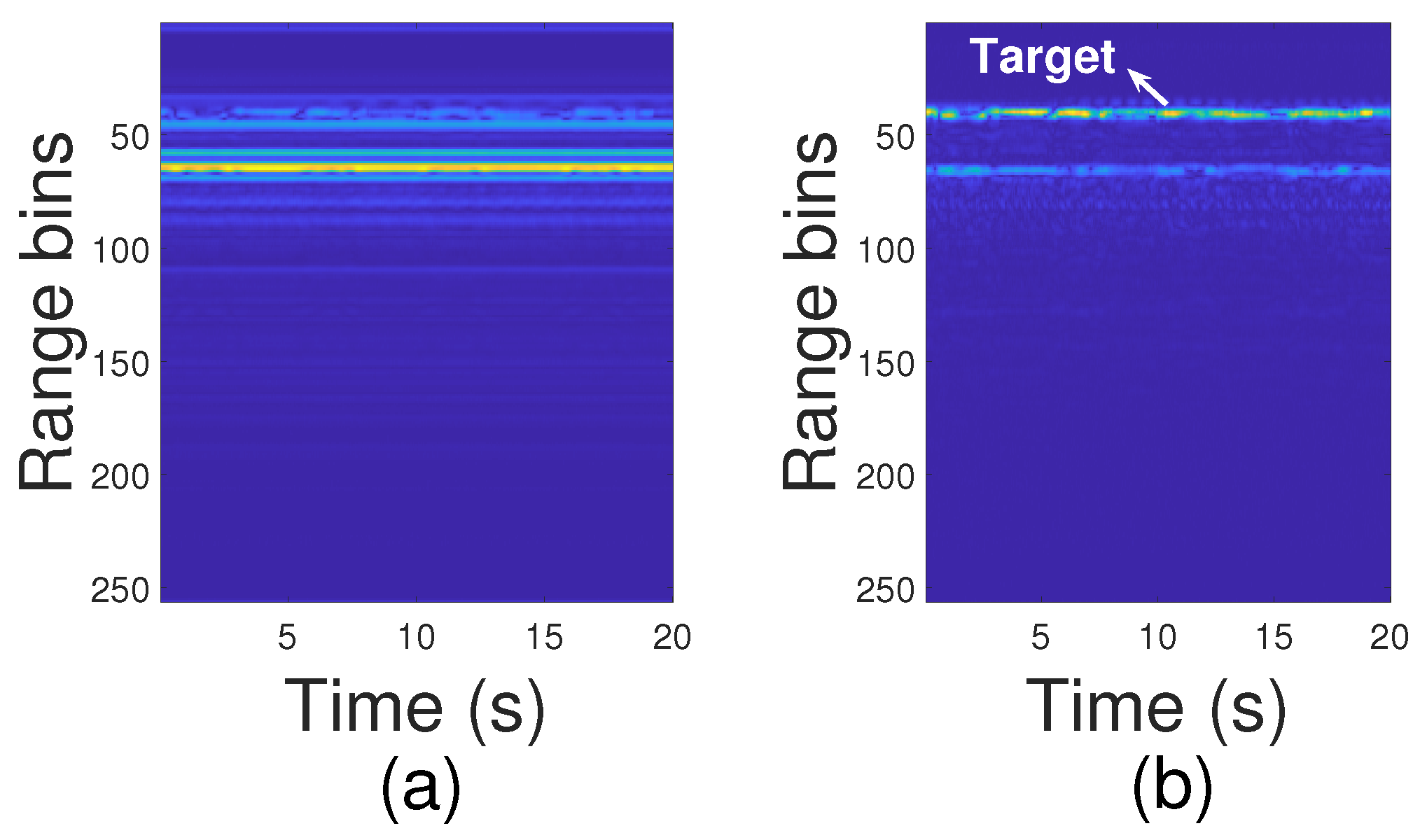
2.1.1. Static Signal Clutter Elimination and Target Range Bin Allocation
2.1.2. DC Compensation and Unwrapping Phase
2.1.3. Time-Frequency Analysis: Respiration and Heart Rate Estimation
3. Vital Signs Algorithm Simulation
3.1. Equations of Transmitted and Received Signals in FMCW MIMO Radar
3.2. Simulation
4. Preliminary Steps as Precursors to Wide Angular Vital Sign Monitoring
4.1. Localization Technique
4.2. Mechanism of Beam Steering
5. Measurement Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bin Obadi, A.; Soh, P.J.; Aldayel, O.; Al-Doori, M.H.; Mercuri, M.; Schreurs, D. A Survey on Vital Signs Detection Using Radar Techniques and Processing with FPGA Implementation. IEEE Circuits Syst. Mag. 2021, 21, 41–74. [Google Scholar] [CrossRef]
- Nallabolu, P.; Zhang, L.; Hong, H.; Li, C. Human Presence Sensing and Gesture Recognition for Smart Home Applications with Moving and Stationary Clutter Suppression Using a 60-GHz Digital Beamforming FMCW Radar. IEEE Access 2021, 9, 72857–72866. [Google Scholar] [CrossRef]
- Cardillo, E.; Caddemi, A. A Review on Biomedical MIMO Radars for Vital Sign Detection and Human Localization. Electronics 2020, 9, 1497. [Google Scholar] [CrossRef]
- Kebe, M.; Gadhafi, R.; Mohammad, B.; Sanduleanu, M.; Saleh, H.; Al-Qutayri, M. Human Vital Signs Detection Methods and Potential Using Radars: A Review. Sensors 2020, 20, 1454. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Li, Y.; Li, C.; Gu, C.; Mao, J.F. Accurate Measurement of Human Vital Signs with Linear FMCW Radars under Proximity Stationary Clutters. IEEE Trans. Biomed. Circuits Syst. 2021, 15, 1393–1404. [Google Scholar] [CrossRef] [PubMed]
- Chiao, J.C.; Li, C.; Lin, J.; Caverly, R.H.; Hwang, J.C.M.; Rosen, H.; Rosen, A. Applications of Microwaves in Medicine. IEEE J. Microwaves 2023, 3, 134–169. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, Y.; Hong, H.; Zhu, X.; Li, C. Noncontact Multi-Target Respiration Sensing Using SIMO Radar with UBSS Method. IEEE Microw. Wirel. Components Lett. 2022, 32, 210–213. [Google Scholar] [CrossRef]
- Le Kernec, J.; Fioranelli, F.; Ding, C.; Zhao, H.; Sun, L.; Hong, H.; Lorandel, J.; Romain, O. Radar Signal Processing for Sensing in Assisted Living: The Challenges Associated with Real-Time Implementation of Emerging Algorithms. IEEE Signal Process. Mag. 2019, 36, 29–41. [Google Scholar] [CrossRef]
- Lv, W.; He, W.; Lin, X.; Miao, J. Non-Contact Monitoring of Human Vital Signs Using FMCW Millimeter Wave Radar in the 120 GHz Band. Sensors 2021, 21, 2732. [Google Scholar] [CrossRef]
- Xu, D.; Yu, W.; Deng, C.; He, Z.S. Non-Contact Detection of Vital Signs Based on Improved Adaptive EEMD Algorithm (July 2022). Sensors 2022, 22, 6423. [Google Scholar] [CrossRef]
- Xiang, M.; Ren, W.; Li, W.; Xue, Z.; Jiang, X. High-Precision Vital Signs Monitoring Method Using a FMCW Millimeter-Wave Sensor. Sensors 2022, 22, 7543. [Google Scholar] [CrossRef] [PubMed]
- Sun, L.; Huang, S.; Li, Y.; Gu, C.; Pan, H.; Hong, H.; Zhu, X. Remote Measurement of Human Vital Signs Based on Joint-Range Adaptive EEMD. IEEE Access 2020, 8, 68514–68524. [Google Scholar] [CrossRef]
- Mercuri, M.; Liu, Y.H.; Lorato, I.; Torfs, T.; Wieringa, F.; Bourdoux, A.; Van Hoof, C. A Direct Phase-Tracking Doppler Radar Using Wavelet Independent Component Analysis for Non-Contact Respiratory and Heart Rate Monitoring. IEEE Trans. Biomed. Circuits Syst. 2018, 12, 632–643. [Google Scholar] [CrossRef] [PubMed]
- Alizadeh, M.; Shaker, G.; Almeida, J.C.M.D.; Morita, P.P.; Safavi-Naeini, S. Remote Monitoring of Human Vital Signs Using mm-Wave FMCW Radar. IEEE Access 2019, 7, 54958–54968. [Google Scholar] [CrossRef]
- Xu, H.; Ebrahim, M.P.; Hasan, K.; Heydari, F.; Howley, P.; Yuce, M.R. Accurate Heart Rate and Respiration Rate Detection Based on a Higher-Order Harmonics Peak Selection Method Using Radar Non-Contact Sensors. Sensors 2022, 22, 83. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Zhang, J.; Qu, Y.; Zhang, S.; Xiao, W. mmRH: Noncontact Vital Sign Detection with an FMCW mm-Wave Radar. IEEE Sens. J. 2023, 23, 8856–8866. [Google Scholar] [CrossRef]
- Dai, T.K.V.; Oleksak, K.; Kvelashvili, T.; Foroughian, F.; Bauder, C.; Theilmann, P.; Fathy, A.E.; Kilic, O. Enhancement of Remote Vital Sign Monitoring Detection Accuracy Using Multiple-Input Multiple-Output 77 GHz FMCW Radar. IEEE J. Electromagn. RF Microwaves Med. Biol. 2022, 6, 111–122. [Google Scholar] [CrossRef]
- Mercuri, M.; Lu, Y.; Polito, S.; Wieringa, F.; Liu, Y.H.; van der Veen, A.J.; Van Hoof, C.; Torfs, T. Enabling Robust Radar-Based Localization and Vital Signs Monitoring in Multipath Propagation Environments. IEEE Trans. Biomed. Eng. 2021, 68, 3228–3240. [Google Scholar] [CrossRef]
- Mercuri, M.; Lorato, I.R.; Liu, Y.H.; Wieringa, F.; Hoof, C.V.; Torfs, T. Vital-sign monitoring and spatial tracking of multiple people using a contactless radar-based sensor. Nat. Electron. 2019, 2, 252–262. [Google Scholar] [CrossRef]
- Mercuri, M.; Sacco, G.; Hornung, R.; Zhang, P.; Visser, H.J.; Hijdra, M.; Liu, Y.H.; Pisa, S.; van Liempd, B.; Torfs, T. 2-D Localization, Angular Separation and Vital Signs Monitoring Using a SISO FMCW Radar for Smart Long-Term Health Monitoring Environments. IEEE Internet Things J. 2021, 8, 11065–11077. [Google Scholar] [CrossRef]
- Mehrjouseresht, P.; Babarinde, O.J.; Hail, R.E.; Schreurs, D.M.M.P. Wide-Angle Vital Signs Measurements by Adaptive FMCW Radar. In Proceedings of the 2023 IEEE MTT-S International Microwave Biomedical Conference (IMBioC), Leuven, Belgium, 11–13 September 2023; pp. 91–93. [Google Scholar] [CrossRef]
- Song, C.; Droitcour, A.D.; Islam, S.M.; Whitworth, A.; Lubecke, V.M.; Boric-Lubecke, O. Unobtrusive occupancy and vital signs sensing for human building interactive systems. Sci. Rep. 2023, 13, 954. [Google Scholar] [CrossRef] [PubMed]
- Texas Instruments. User’s Guide—60GHz mmWave Sensor EVMs; Texas Instruments: Dallas, TX, USA, 2020. [Google Scholar]
- Islam, S.M.M.; Boric-Lubecke, O.; Lubekce, V.M. Concurrent Respiration Monitoring of Multiple Subjects by Phase-Comparison Monopulse Radar Using Independent Component Analysis (ICA) with JADE Algorithm and Direction of Arrival (DOA). IEEE Access 2020, 8, 73558–73569. [Google Scholar] [CrossRef]
- Texas Instruments. Tracking Radar Targets with Multiple Reflection Points; Texas Instruments: Dallas, TX, USA, 2021. [Google Scholar]
- Bae, C.; Lee, S.; Jung, Y. High-Speed Continuous Wavelet Transform Processor for Vital Signal Measurement Using Frequency-Modulated Continuous Wave Radar. Sensors 2022, 22, 3073. [Google Scholar] [CrossRef] [PubMed]
- Texas Instruments. IWR6843AOP Single-Chip 60- to 64-GHz mmWave Sensor Antennas-On-Package (AOP); Texas Instruments: Dallas, TX, USA, 2021. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| 60 GHz | |
| ADC sampling frequency | per second |
| Slow-time sampling frequency (frame period) | 20 Hz (50 ms) |
| Number of transmitter antennas | 1 |
| Number of receiver antennas | 2 |
| The chirp bandwidth | GHz |
| Number of chirps | 12 |
| Separation between receiver antennas | |
| Number of ADC samples | 256 |
| Parameters | Description |
|---|---|
| Environmental Factors (Xmin, Xmax, Ymin, Ymax, Zmin, Zmax) | Determining the physical dimensions within which the tracker functions |
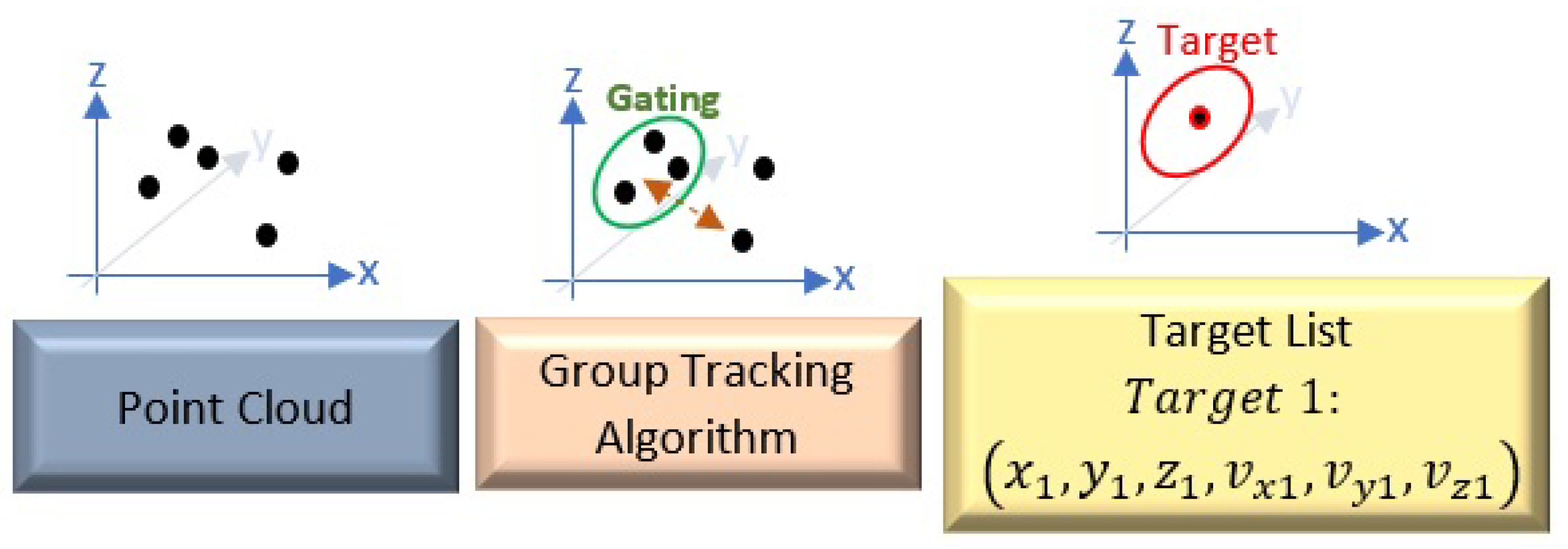
| Gating (width, depth, height, velocity) | Defining the maximal volume and velocity of an object being tracked and is used to associate the points with existing tracks |
| Allocation (SNR thr, velocity thr, points thr, distance thr, diffVelocity thr) | To detect a new target in the scene when the points do not correspond to existing track by defining thresholds (thr) for SNR, velocity, number of points, the distance between points, velocity difference between points |
| Radar Configuration | ||||||
|---|---|---|---|---|---|---|
| Localization | Vital Sign | |||||
| No. of Transmitter Antennas | 3 | |||||
| No. of Receiver Antennas | 4 | |||||
| Frequency Sweep Rate | 50 MHz/μs | |||||
| Frame Period | 100 ms | 50 ms | ||||
| No. Chirps | 64 | 12 | ||||
| Range Resolution | 0.056 m | 0.046 m | ||||
| Velocity Resolution | 0.1528 m/s | 3.24 m/s | ||||
| Group Tracking Parameters | ||||||
| Gating Parameters | Gain | Width | Depth | Height | Velocity | |
| 4 | 2 m | 2 m | 2 m | 10 m/s | ||
| Allocation Parameters | SNR thr | Obscured SNR thr | Velocity thr | Points thr | max Squared Distance thr | maxVelocity thr |
| 200 | 155 | 0.5 m/s | 10 | 2 m2 | 2 m/s | |
| Subjects | Distance (m) | Angle (Degree) | Respiration Rate | Heart Rate | ||
|---|---|---|---|---|---|---|
| MAE | RMSE | MAE | RMSE | |||
| 1 | 1.58 | 25.7 | 0.76 | 0.93 | 5.52 | 6.78 |
| 1.84 | −26.8 | 0.83 | 1.09 | 3.74 | 4.96 | |
| 2 | 1.4 | −24.6 | 0.72 | 0.85 | 4.52 | 6.19 |
| 1.28 | 19.2 | 0.5 | 0.57 | 3.05 | 3.89 | |
| 3 | 2.3 | 40 | 0.49 | 0.57 | 7.29 | 8.14 |
| 1.93 | −44.8 | 0.35 | 0.45 | 9 | 9.49 | |
| 4 | 1.64 | 19.75 | 0.4 | 0.48 | 3.95 | 4.69 |
| 1.91 | −7.97 | 0.63 | 0.83 | 6.13 | 7.15 | |
| 2.25 | 19.93 | 0.48 | 0.61 | 5.95 | 7.29 | |
| 5 | 1.87 | −34.16 | 0.35 | 0.39 | 4.54 | 5.41 |
| 1.69 | 35.2 | 0.39 | 0.43 | 4.24 | 5.3 | |
| 6 | 1.75 | −24.09 | 0.7 | 0.78 | 3.15 | 3.5 |
| 1.15 | 37.78 | 0.5 | 0.62 | 2.66 | 3.24 | |
| 1.75 | −34 | 0.67 | 0.82 | 2.66 | 3.98 | |
| Distance (m) | Angle (degree) | ERROR | Radar | Online Monitoring | 2D Localization | |||
|---|---|---|---|---|---|---|---|---|
| BR | HR | |||||||
| MAE | RMSE | MAE | ||||||
| [12] | 1–2.5 | 0 | - | <6 | - | IWR1642 | Potential | No |
| [10] | 0.5–2.5 | 0 | - | <2.3 | - | IWR1843 | Potential | No |
| [9] | 1 | 0 | - | - | - | Custom-designed | Yes | No |
| [16] | 1–1.2 | −30–+30 | <≈0.6 | - | ≈6 | Custom-designed | Yes | No |
| [13] | 2 | 0 | - | <3.33 | - | Custom-designed | - | No |
| This work | 1.15–2.3 | −44.8–+44.8 | <0.83 | <9.49 | <9 | IWR6843AOPEVM | Yes | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mehrjouseresht, P.; Hail, R.E.; Karsmakers, P.; Schreurs, D.M.M.-P. Respiration and Heart Rate Monitoring in Smart Homes: An Angular-Free Approach with an FMCW Radar. Sensors 2024, 24, 2448. https://doi.org/10.3390/s24082448
Mehrjouseresht P, Hail RE, Karsmakers P, Schreurs DMM-P. Respiration and Heart Rate Monitoring in Smart Homes: An Angular-Free Approach with an FMCW Radar. Sensors. 2024; 24(8):2448. https://doi.org/10.3390/s24082448
Chicago/Turabian StyleMehrjouseresht, Pouya, Reda El Hail, Peter Karsmakers, and Dominique M. M.-P. Schreurs. 2024. "Respiration and Heart Rate Monitoring in Smart Homes: An Angular-Free Approach with an FMCW Radar" Sensors 24, no. 8: 2448. https://doi.org/10.3390/s24082448
APA StyleMehrjouseresht, P., Hail, R. E., Karsmakers, P., & Schreurs, D. M. M.-P. (2024). Respiration and Heart Rate Monitoring in Smart Homes: An Angular-Free Approach with an FMCW Radar. Sensors, 24(8), 2448. https://doi.org/10.3390/s24082448