
Digital Self-Interference Canceler with Joint Channel Estimator for Simultaneous Transmit and Receive System

Abstract
1. Introduction
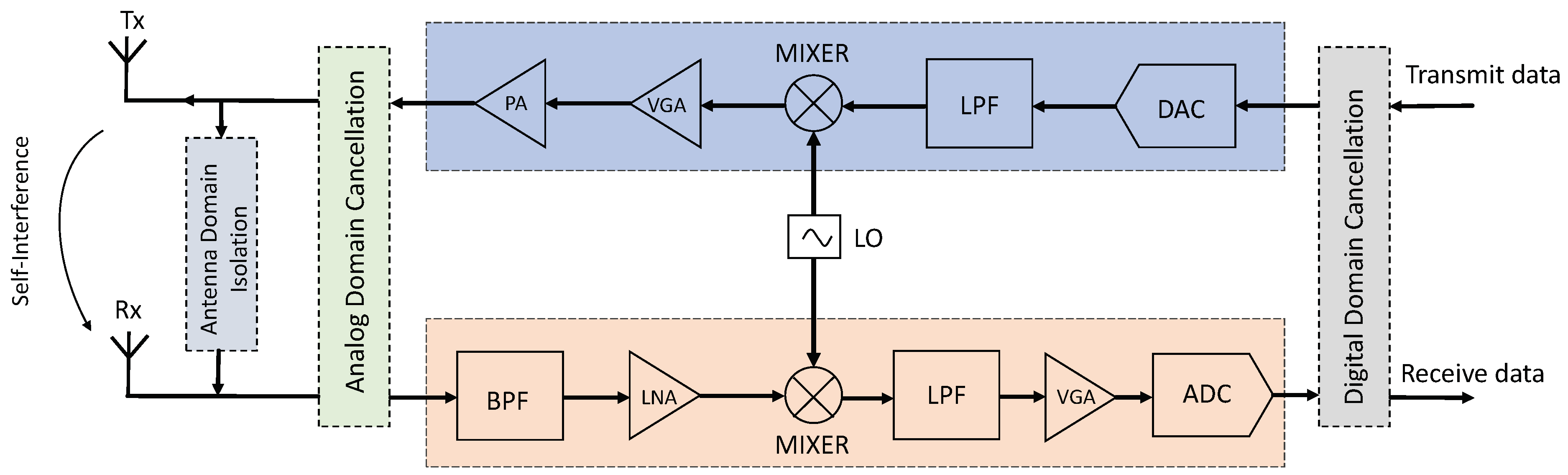
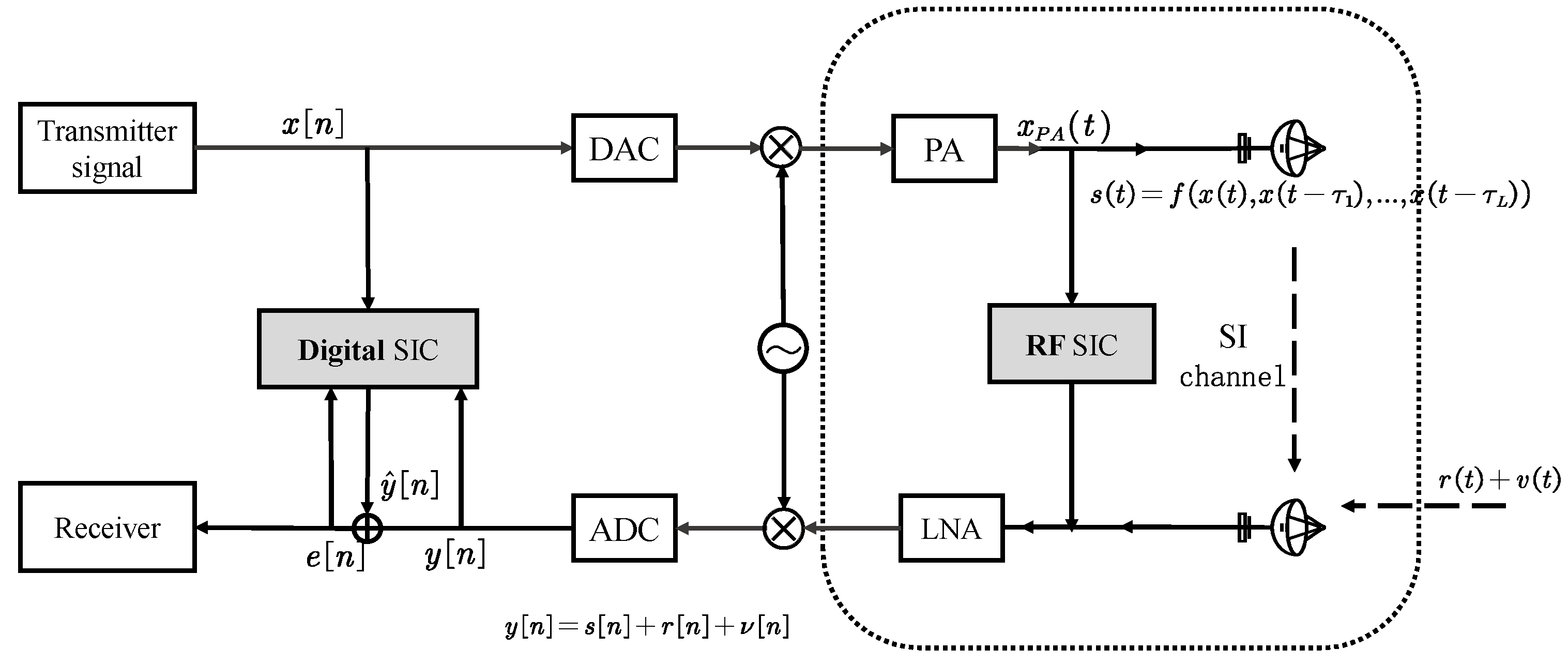
2. System Model
3. Proposed Digital Canceler
3.1. Robust m-MTLS Adaptive Algorithm
3.2. Multi-Layered Generalized HP-Based Adaptive Algorithm
| Algorithm 1 Adaptive algorithm for nonlinear SIC |
|
4. Simulation Results
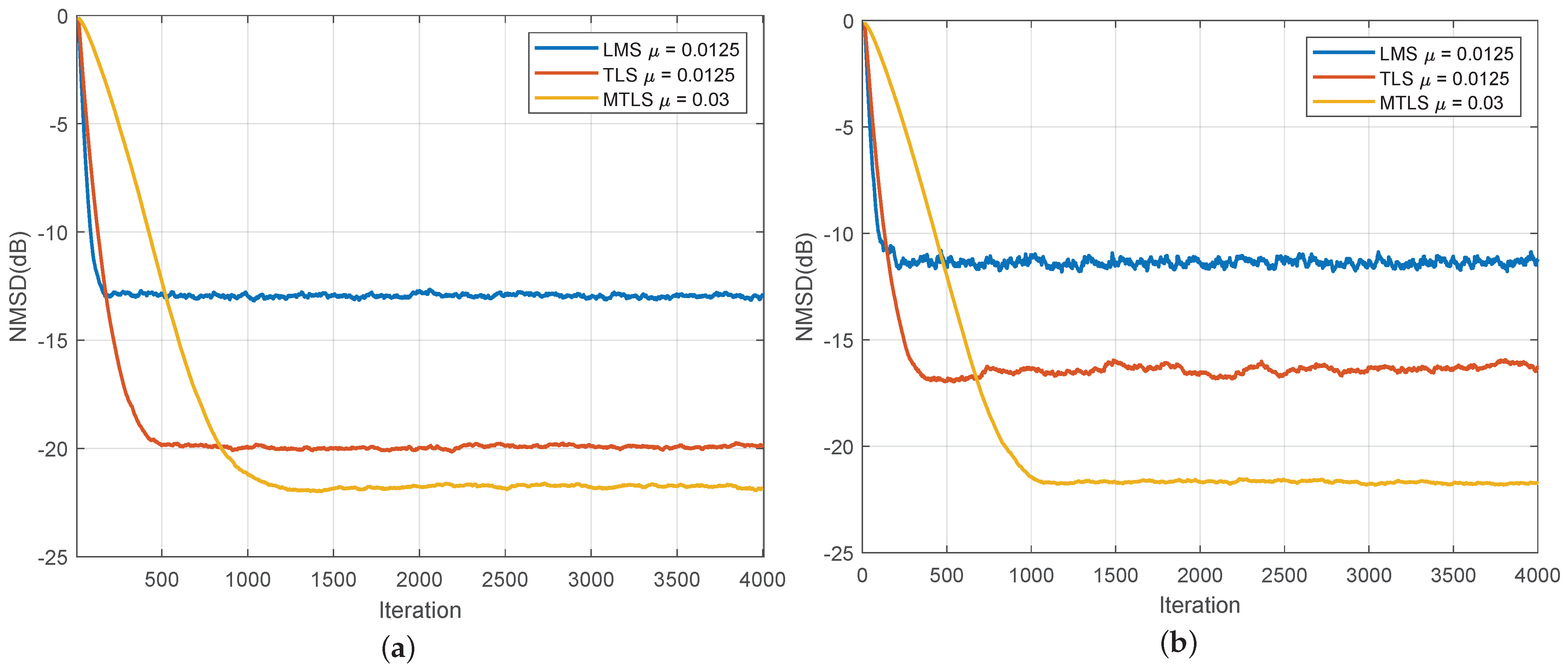
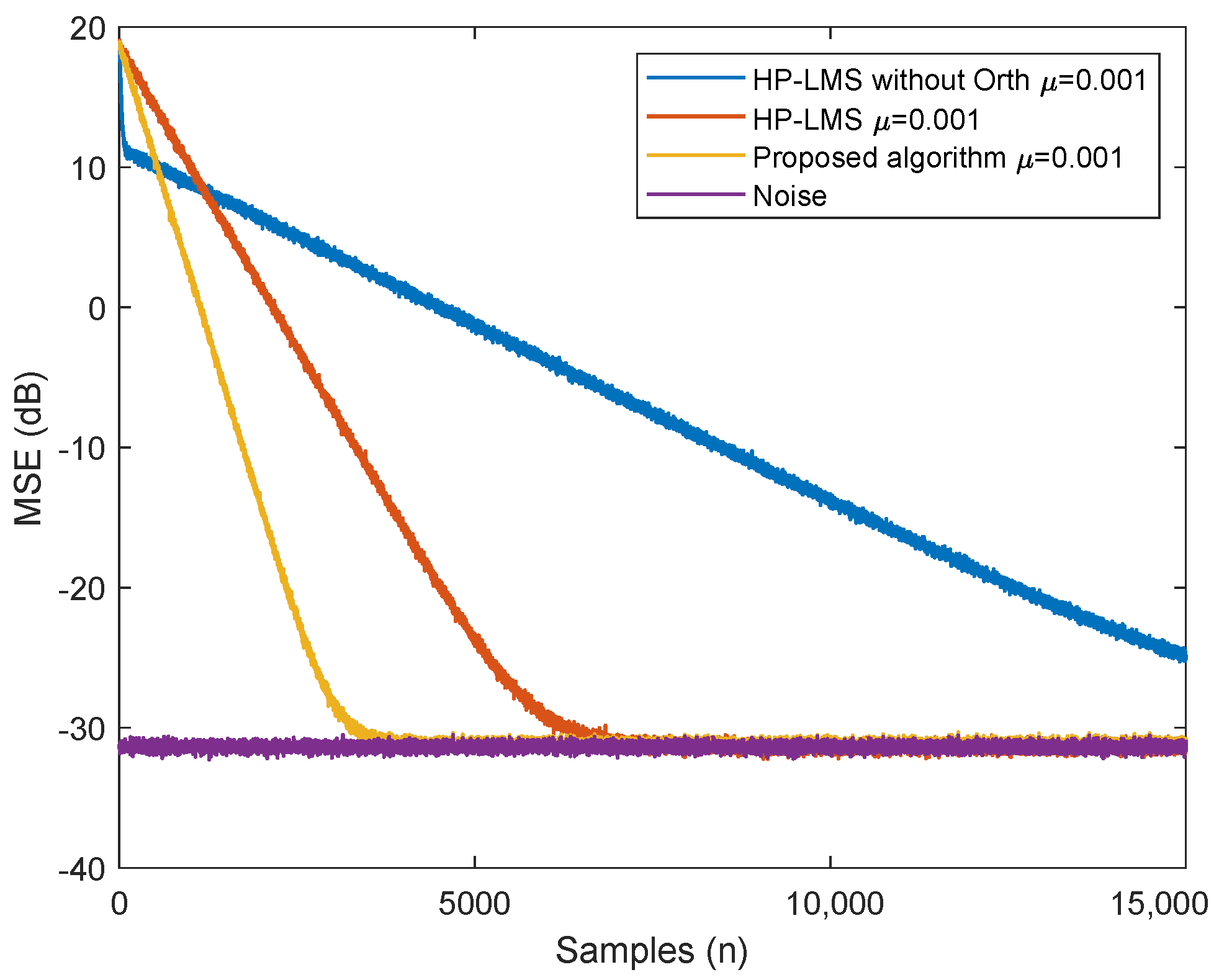
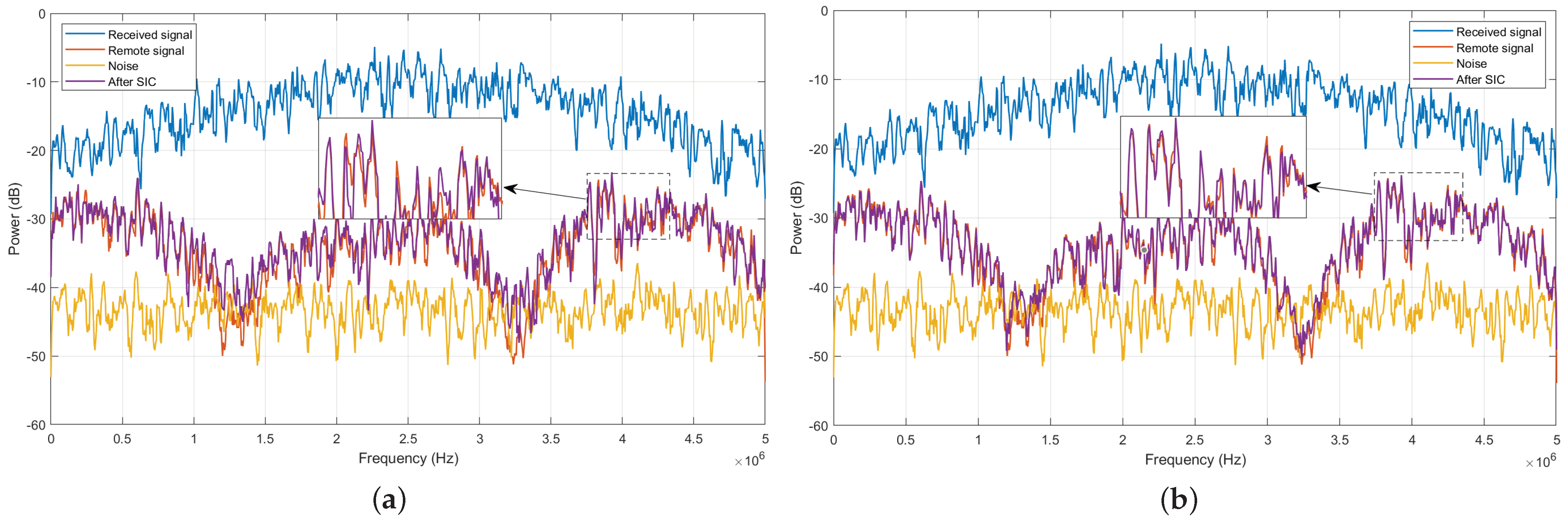
4.1. Linear SI Canceler
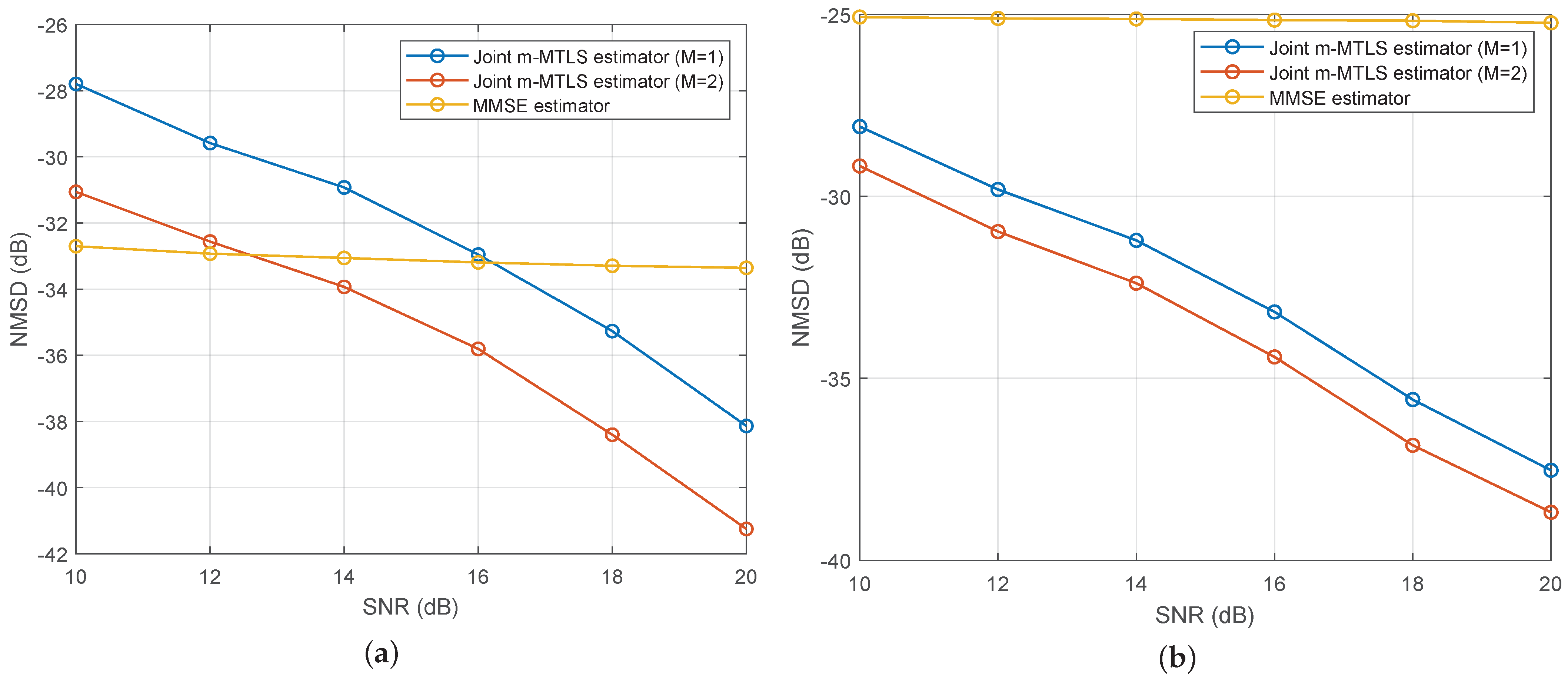
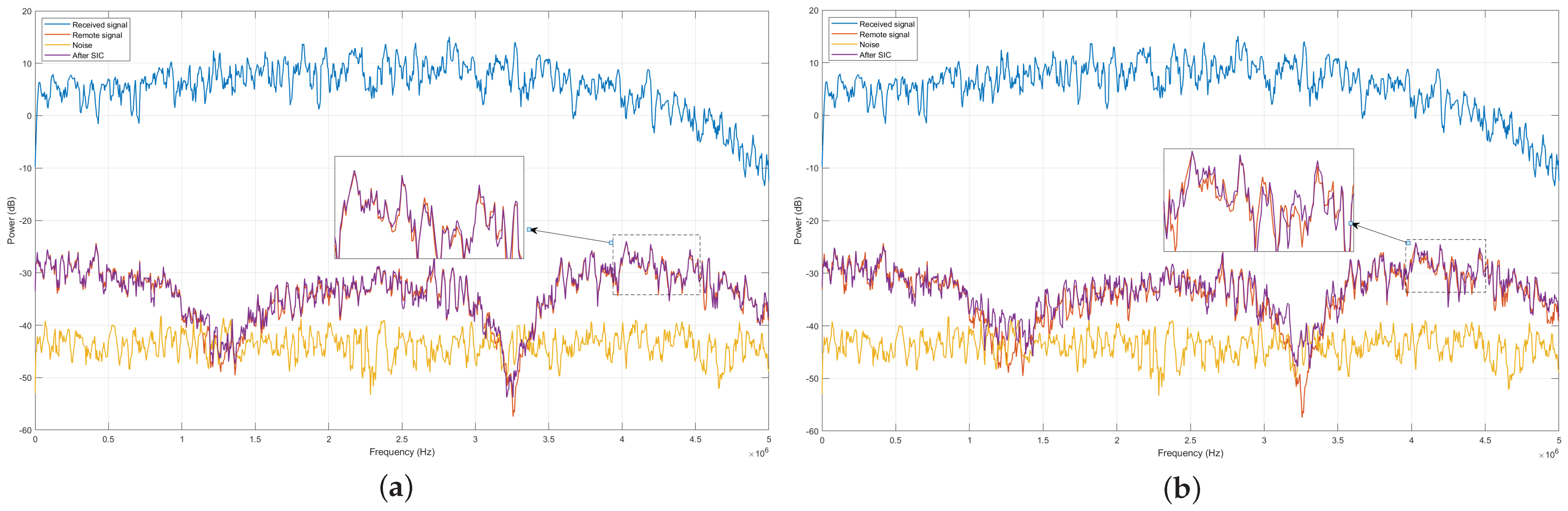
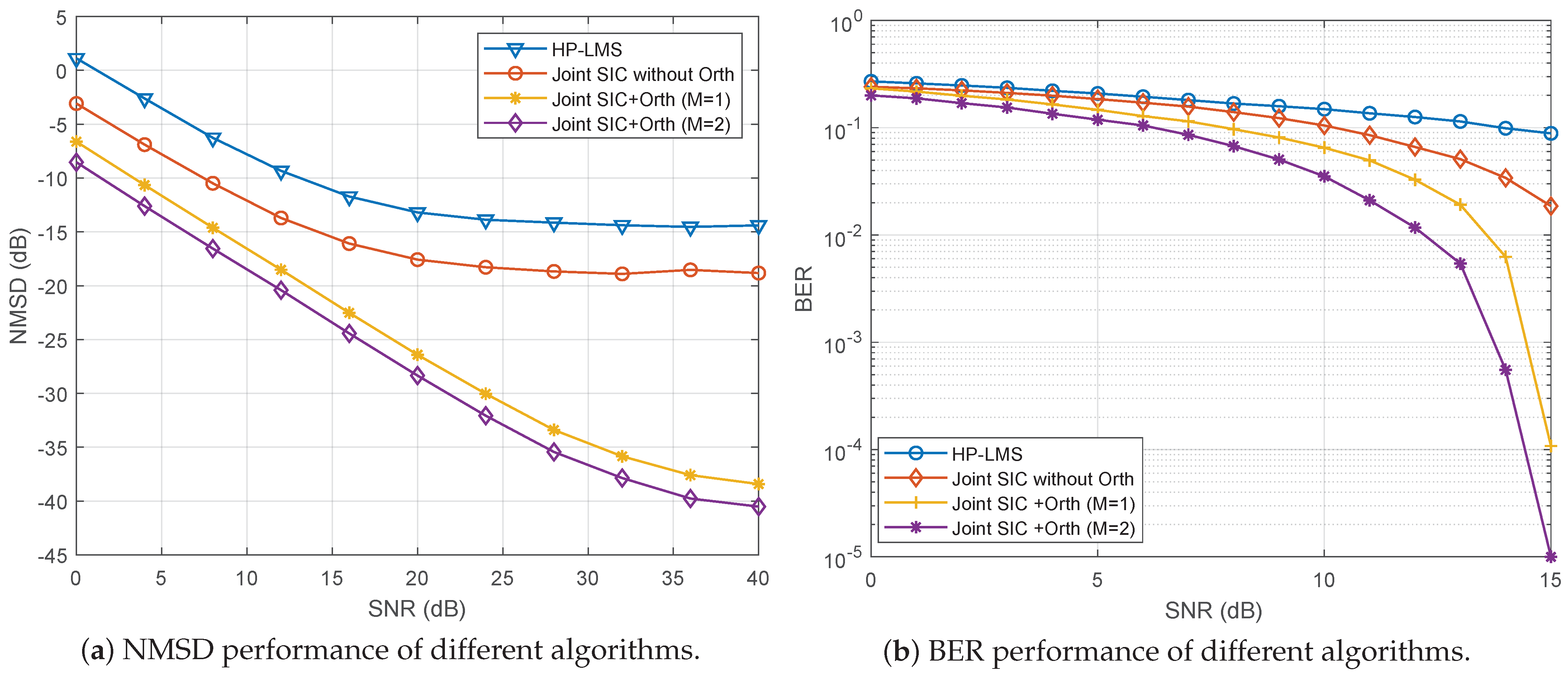
4.2. Nonlinear SI Canceler
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, G.; Yu, F.R.; Ji, H.; Leung, V.C.M.; Li, X. In-Band Full-Duplex Relaying: A Survey, Research Issues and Challenges. IEEE Commun. Surv. Tutor. 2015, 17, 500–524. [Google Scholar] [CrossRef]
- Lin, Z.; Niu, H.; An, K.; Wang, Y.; Zheng, G.; Chatzinotas, S.; Hu, Y. Refracting RIS-Aided Hybrid Satellite-Terrestrial Relay Networks: Joint Beamforming Design and Optimization. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3717–3724. [Google Scholar] [CrossRef]
- Ma, R.; Yang, W.; Guan, X.; Lu, X.; Song, Y.; Chen, D. Covert mmWave Communications With Finite Blocklength Against Spatially Random Wardens. IEEE Internet Things J. 2024, 11, 3402–3416. [Google Scholar] [CrossRef]
- Guo, K.; Dong, C.; An, K. NOMA-Based Cognitive Satellite Terrestrial Relay Network: Secrecy Performance Under Channel Estimation Errors and Hardware Impairments. IEEE Internet Things J. 2022, 9, 17334–17347. [Google Scholar] [CrossRef]
- Sabharwal, A.; Schniter, P.; Guo, D.; Bliss, D.W.; Rangarajan, S.; Wichman, R. In-Band Full-Duplex Wireless: Challenges and Opportunities. IEEE J. Sel. Areas Commun. 2014, 32, 1637–1652. [Google Scholar] [CrossRef]
- Kolodziej, K.E.; Perry, B.T.; Herd, J.S. In-Band Full-Duplex Technology: Techniques and Systems Survey. IEEE Trans. Microw. Theory Tech. 2019, 67, 3025–3041. [Google Scholar] [CrossRef]
- Anttila, L.; Lampu, V.; Hassani, S.A.; Campo, P.P.; Korpi, D.; Turunen, M.; Pollin, S.; Valkama, M. Full-Duplexing with SDR Devices: Algorithms, FPGA Implementation, and Real-Time Results. IEEE Trans. Wirel. Commun. 2021, 20, 2205–2220. [Google Scholar] [CrossRef]
- Laco, J.M.; Gregorio, F.H.; González, G.; Cousseau, J.E.; Riihonen, T.; Wichman, R. Patch Antenna Design for Full-Duplex Transceivers. In Proceedings of the 2017 European Conference on Networks and Communications (EuCNC), Oulu, Finland, 12–15 June 2017; pp. 1–5. [Google Scholar]
- Le, A.T.; Tran, L.C.; Huang, X.; Guo, Y.J.; Hanzo, L. Analog Least Mean Square Adaptive Filtering for Self-Interference Cancellation in Full Duplex Radios. IEEE Wirel. Commun. 2021, 28, 12–18. [Google Scholar] [CrossRef]
- Song, S.; Tang, Y.; Wei, X.; Zhou, Y.; Lu, X.; Wang, Z.; Ge, S. Digital Self-Interference Cancellation With Robust Multi-layered Total Least Mean Squares Adaptive Filters. In Proceedings of the 2023 IEEE 98th Vehicular Technology Conference (VTC2023-Fall), Hong Kong, China, 10–13 October 2023; pp. 1–5. [Google Scholar]
- Hongbo, L.; Jin, M.; Songhu, G.; Junkai, M. Identification and Simulation of Interference Cancellation System Self Adaptive Filtering. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 1892–1897. [Google Scholar]
- Yongjiang, L.; Luhao, B.; Dong, Z. Adaptive Digital Self-Interference Cancellation Based on Fractional Rrder LMS in LFMCW Radar. J. Syst. Eng. Electron. 2021, 32, 573–583. [Google Scholar] [CrossRef]
- Duarte, M.; Dick, C.; Sabharwal, A. Experiment-Driven Characterization of Full-Duplex Wireless Systems. IEEE Trans. Wirel. Commun. 2012, 11, 4296–4307. [Google Scholar] [CrossRef]
- Korpi, D.; Choi, Y.S.; Huusari, T.; Anttila, L.; Talwar, S.; Valkama, M. Adaptive Nonlinear Digital Self-Interference Cancellation for Mobile Inband Full-Duplex Radio: Algorithms and RF Measurements. In Proceedings of the 2015 IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–7. [Google Scholar]
- Lee, H.; Lee, N. Nonlinear and Non-Stationary Self-Interference Cancellation for Full-Duplex Wireless Systems. In Proceedings of the ICC 2023—IEEE International Conference on Communications, Rome, Italy, 28 May–1 June 2023; pp. 1370–1375. [Google Scholar]
- Bharadia, D.; McMilin, E.; Katti, S. Full duplex radios. SIGCOMM Comput. Commun. Rev. 2013, 43, 375–386. [Google Scholar] [CrossRef]
- Li, L.; Zhao, H. A Robust Total Least Mean M-Estimate Adaptive Algorithm for Impulsive Noise Suppression. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 800–804. [Google Scholar] [CrossRef]
- Ding, L. Digital Predistortion of Power Amplifiers for Wireless Applications; Georgia Institute of Technology: Atlanta, GA, USA, 2004. [Google Scholar]
- Korpi, D.; Huusari, T.; Choi, Y.S.; Anttila, L.; Talwar, S.; Valkama, M. Digital Self-Interference Cancellation Under Nonideal RF Components: Advanced Algorithms and Measured Performance. In Proceedings of the 2015 IEEE 16th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Stockholm, Sweden, 28 June–1 July 2015; pp. 286–290. [Google Scholar]
- Korpi, D.; Anttila, L.; Syrjälä, V.; Valkama, M. Widely Linear Digital Self-Interference Cancellation in Direct-Conversion Full-Duplex Transceiver. IEEE J. Sel. Areas Commun. 2014, 32, 1674–1687. [Google Scholar] [CrossRef]
- Komatsu, K.; Miyaji, Y.; Uehara, H. Frequency-Domain Hammerstein Self-Interference Canceller for In-Band Full-Duplex OFDM Systems. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar]
- Yimin, H.; Hongzhi, Z.; Shihai, S. Frequency-Domain Nonlinear Interference Cancellation Scheme with IQ Imbalance in Full-Duplex Systems. Sci. Sin. Inform. 2023, 53, 1212–1229. [Google Scholar]
- Towliat, M.; Guo, Z.; Cimini, L.J.; Xia, X.G.; Song, A. Enhanced Accuracy of Self-Interference Cancellation in Underwater Acoustic Full-Duplex Communication. In Proceedings of the MILCOM 2022—2022 IEEE Military Communications Conference (MILCOM), Rockville, MD, USA, 28 November–2 December 2022; pp. 781–786. [Google Scholar]
- Despina-Stoian, C.; Youssef, R.; Digulescu, A.; Radoi, E.; Gautier, R.; Serbanescu, A. Widely-Linear Digital Self-Interference Cancellation in Full-Duplex USRP Transceiver. Sensors 2022, 22, 9607. [Google Scholar] [CrossRef] [PubMed]
- Arablouei, R.; Werner, S.; Doğançay, K. Analysis of the Gradient-Descent Total Least-Squares Adaptive Filtering Algorithm. IEEE Trans. Signal Process. 2014, 62, 1256–1264. [Google Scholar] [CrossRef]
- Shongwe, T.; Vinck, A.J.H.; Ferreira, H.C. A Study on Impulse Noise and Its Models. SAIEE Afr. Res. J. 2015, 106, 119–131. [Google Scholar] [CrossRef]
- Saleh, A. Frequency-Independent and Frequency-Dependent Nonlinear Models of TWT Amplifiers. IEEE Trans. Commun. 1981, 29, 1715–1720. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Definition |
|---|---|
| STAR | simultaneous transmit and receive |
| IBFD | in-band full-duplex |
| SI | self-interference |
| SIC | self-interference cancellation |
| RF | Radio Frequency |
| LNA | low-noise amplifier |
| PA | power amplifier |
| LMS | least mean square |
| PH | parallel Hammerstein |
| TX | transmitter |
| RT | remote transmitter |
| HP | Hammerstein polynomials |
| SNR | signal-to-noise ratio |
| ISR | interference-to-signal ratio |
| m-MTLS | multi-layered M-estimate total least squares |
| NMSD | normalized mean squared difference |
| MSE | mean squared error |
| BER | bit error rate |
| DFE | decision feedback equalizer |
| Parameter | Symbol |
|---|---|
| p-th order basis functions | |
| Coefficients of the p-th basis function | |
| Nonlinear order of PA | P |
| p-th SI channel response | |
| p-th RT channel response | |
| Joint channel response | |
| p-th even-order partial moments | |
| Number of layers | M |
| Input of m-th layers |
| Parameter | Symbol | Value |
|---|---|---|
| Length of SI channel | 4 | |
| Length of RT channel | 10 | |
| Layers | M | 2 |
| Input noise | ||
| Output noise | ||
| Gaussian noise | , | |
| Impulsive noise | ||
| ISR | - | 20 dB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, S.; Tang, Y.; Lu, X.; Zhou, Y.; Wei, X.; Wang, Z.; Ge, S. Digital Self-Interference Canceler with Joint Channel Estimator for Simultaneous Transmit and Receive System. Sensors 2024, 24, 2449. https://doi.org/10.3390/s24082449
Song S, Tang Y, Lu X, Zhou Y, Wei X, Wang Z, Ge S. Digital Self-Interference Canceler with Joint Channel Estimator for Simultaneous Transmit and Receive System. Sensors. 2024; 24(8):2449. https://doi.org/10.3390/s24082449
Chicago/Turabian StyleSong, Shiyu, Yanqun Tang, Xianjie Lu, Yu Zhou, Xizhang Wei, Zhengpeng Wang, and Songhu Ge. 2024. "Digital Self-Interference Canceler with Joint Channel Estimator for Simultaneous Transmit and Receive System" Sensors 24, no. 8: 2449. https://doi.org/10.3390/s24082449
APA StyleSong, S., Tang, Y., Lu, X., Zhou, Y., Wei, X., Wang, Z., & Ge, S. (2024). Digital Self-Interference Canceler with Joint Channel Estimator for Simultaneous Transmit and Receive System. Sensors, 24(8), 2449. https://doi.org/10.3390/s24082449