
The Design and Ground Test Verification of an Energy-Efficient Wireless System for the Fatigue Monitoring of Wind Turbine Blades Based on Bistable Piezoelectric Energy Harvesting

 ,
,  ,
,  ,
,
Abstract
1. Introduction
2. Design of the Energy-Efficient Monitoring System
2.1. Design Requirements
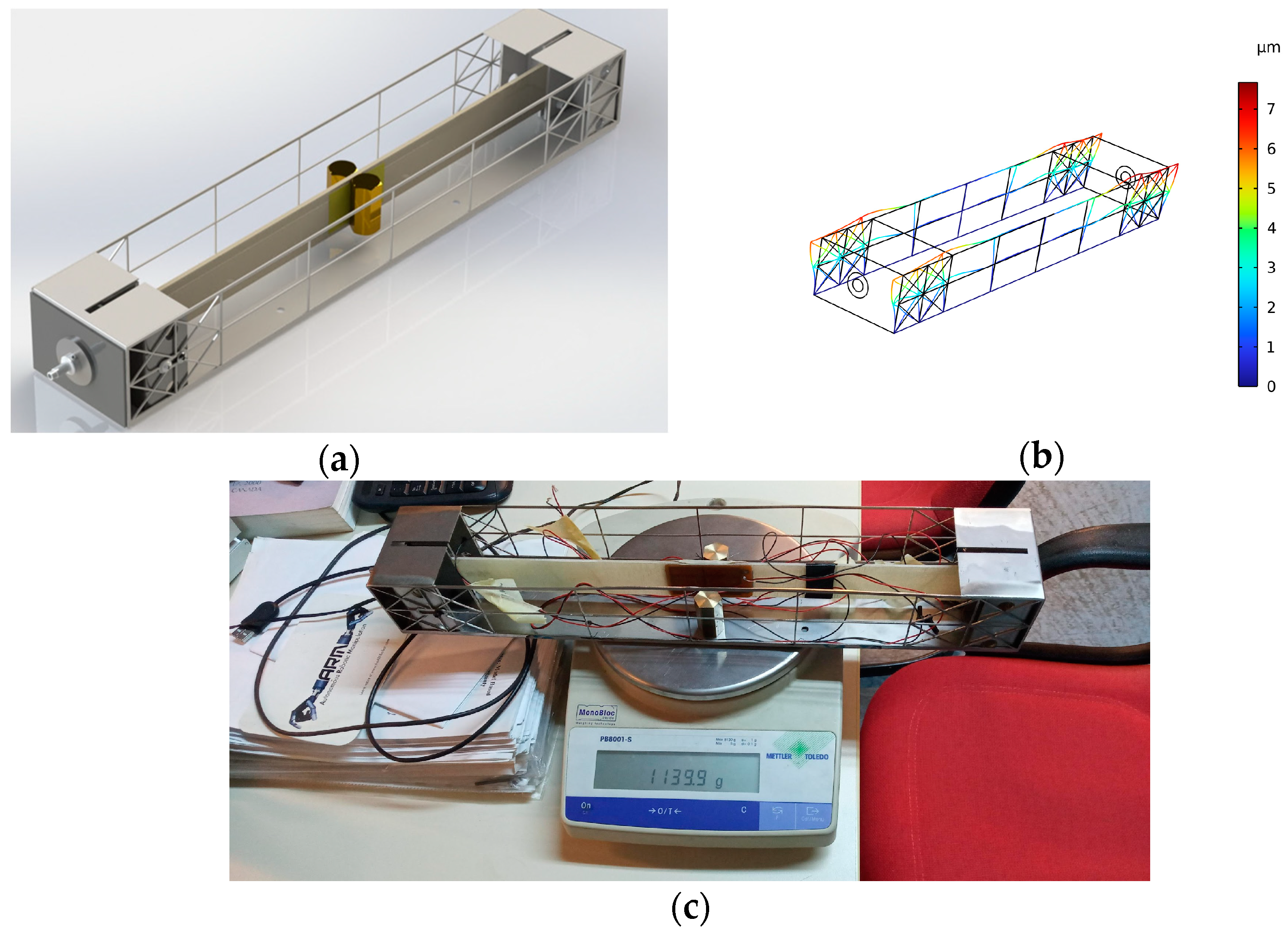
2.2. Electromechanical Conversion Unit (EMCU): Bistable PEH
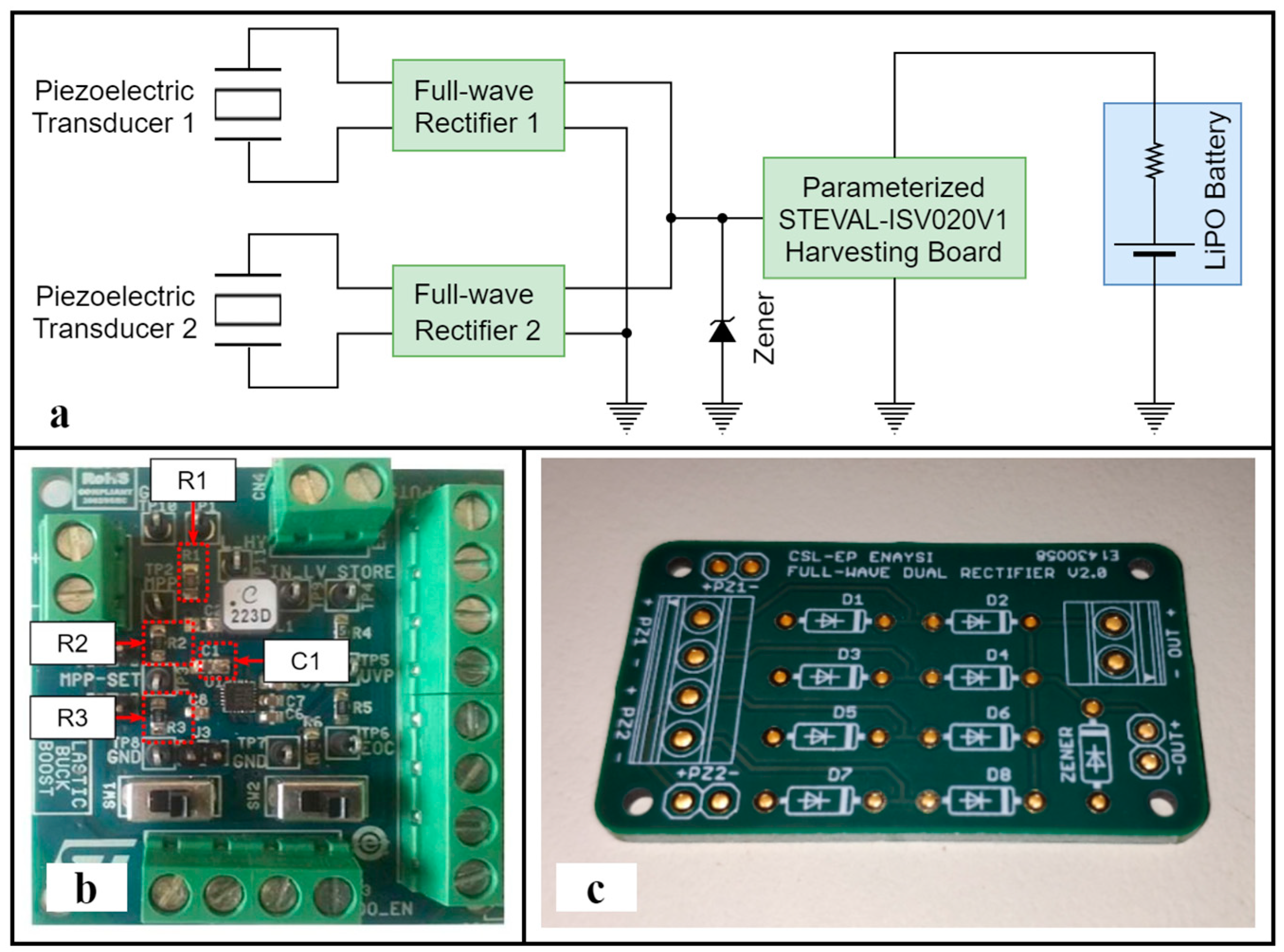
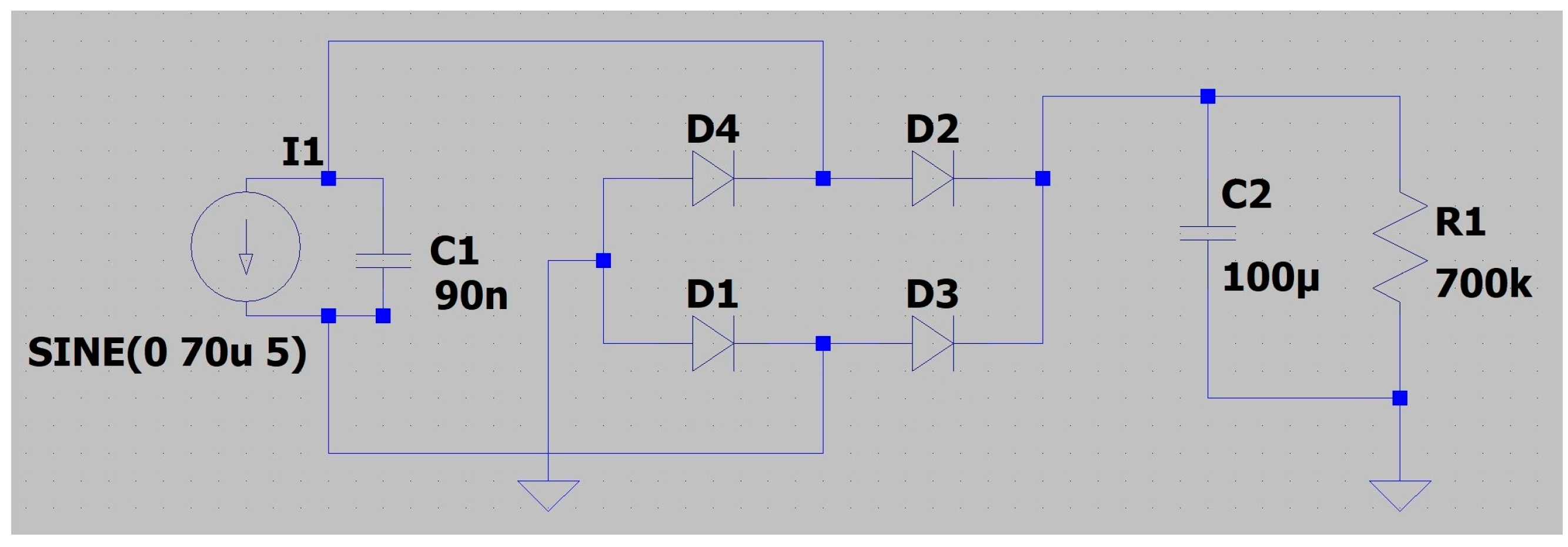
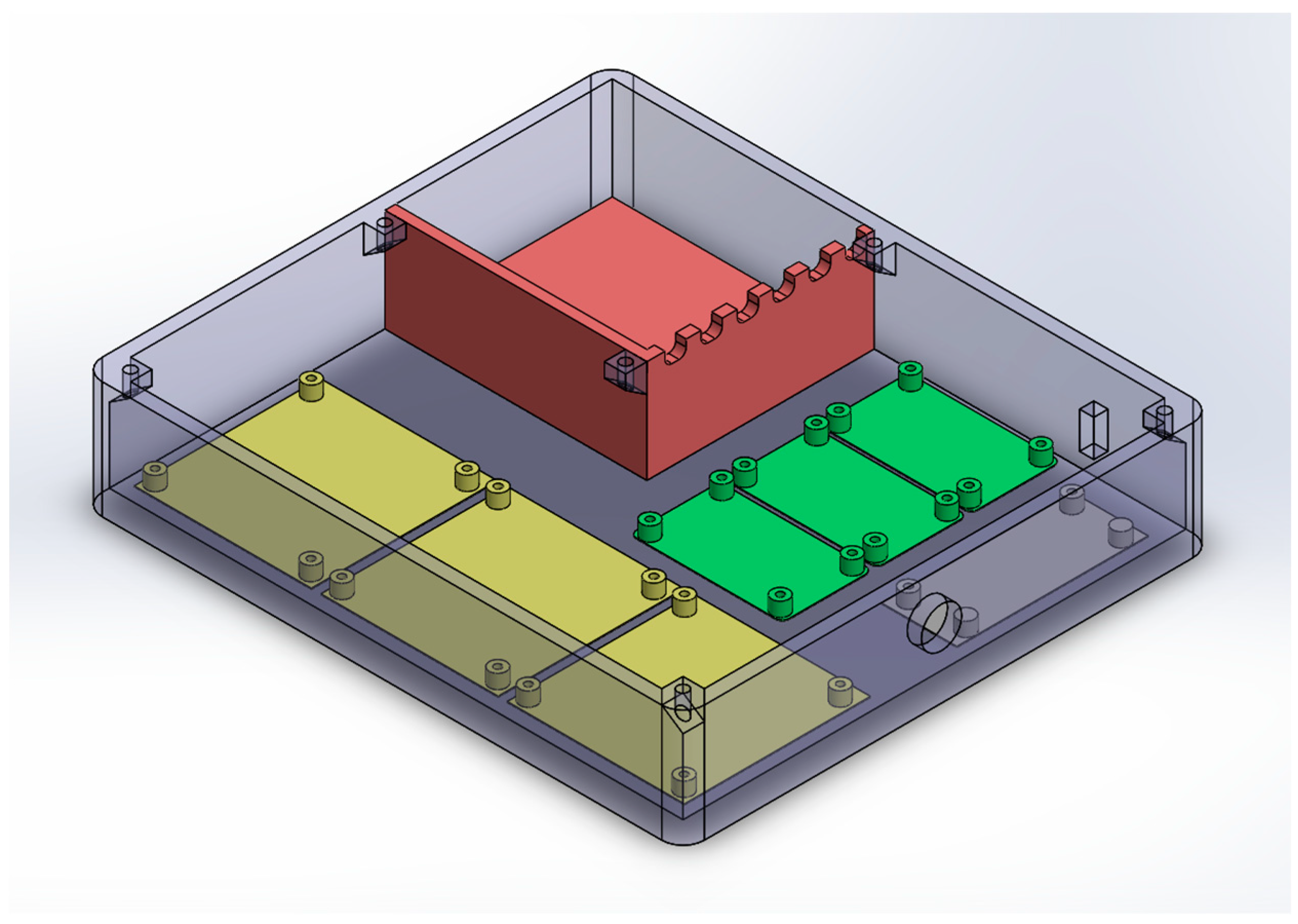
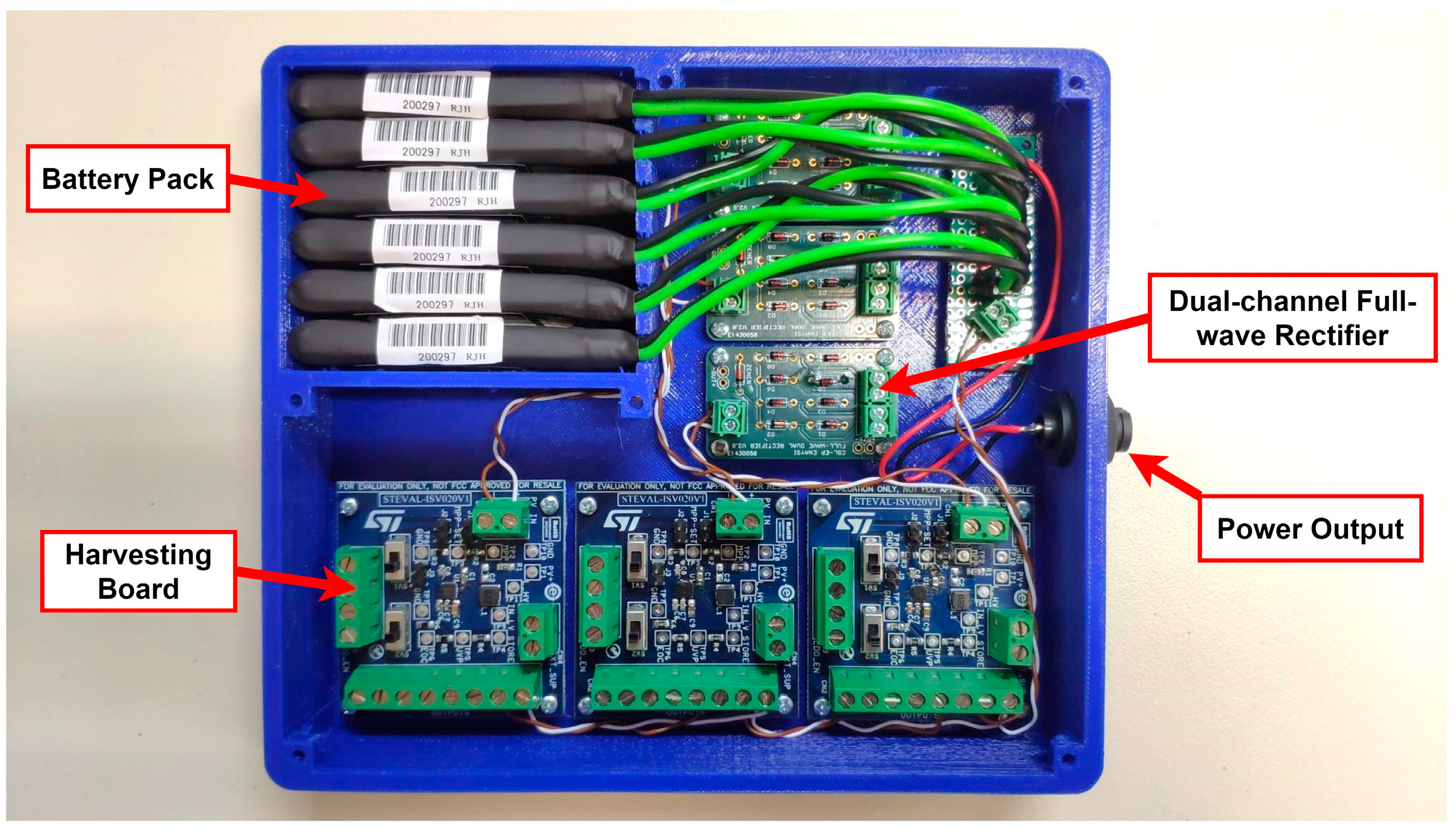
2.3. Energy-Harvesting Circuit Unit (EHCU)
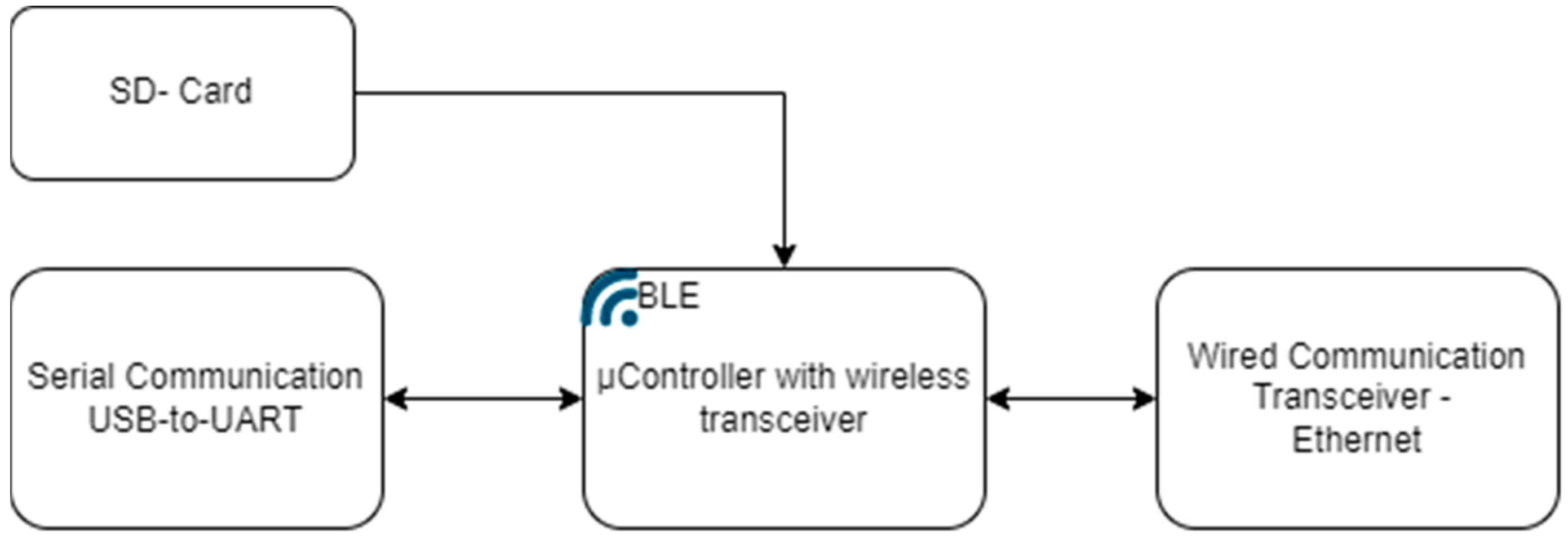
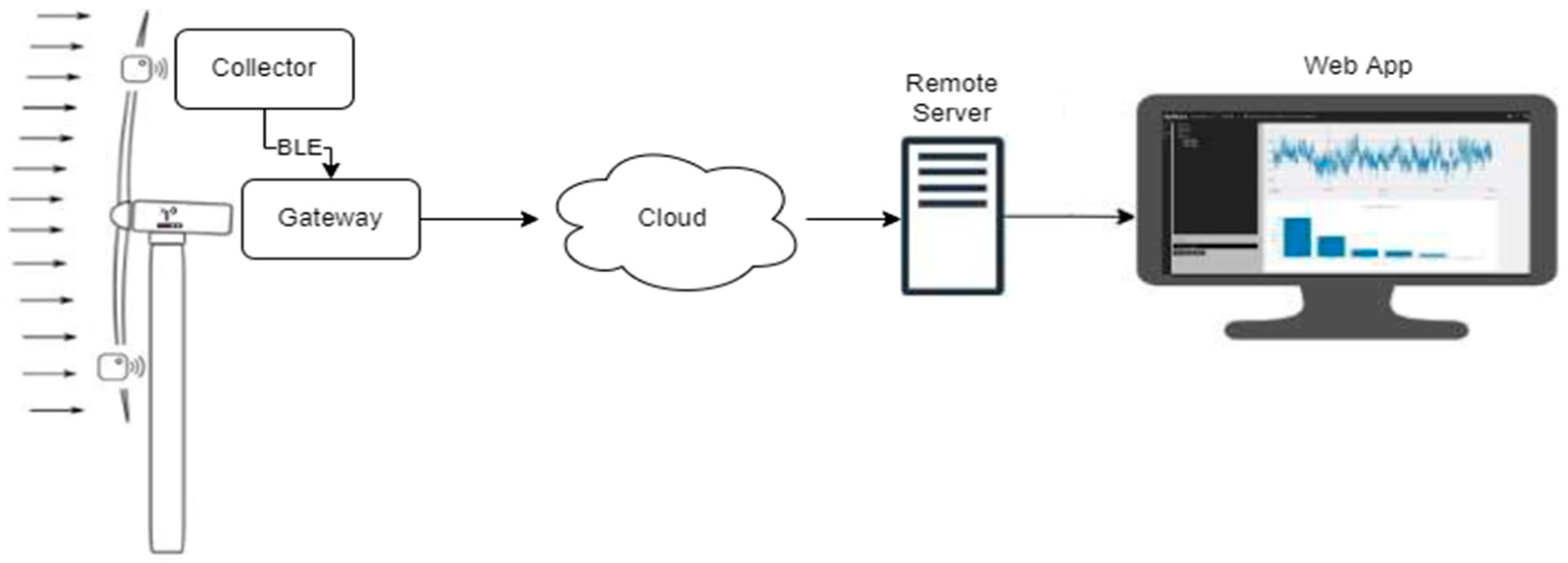
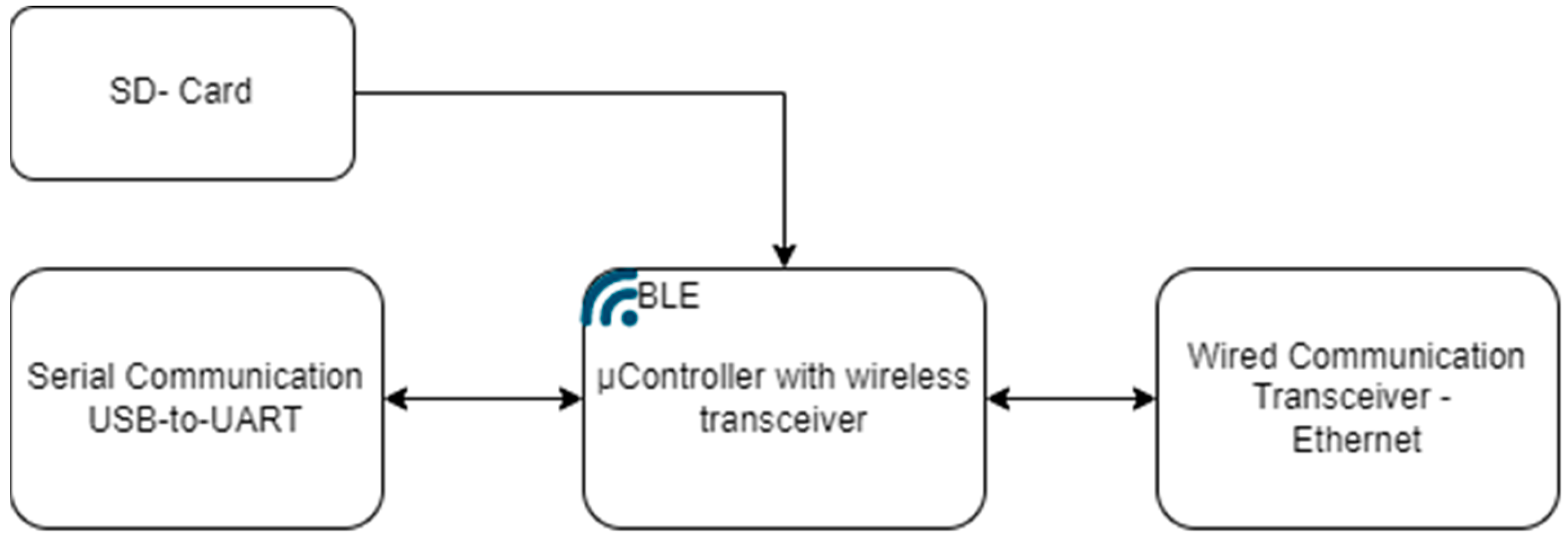
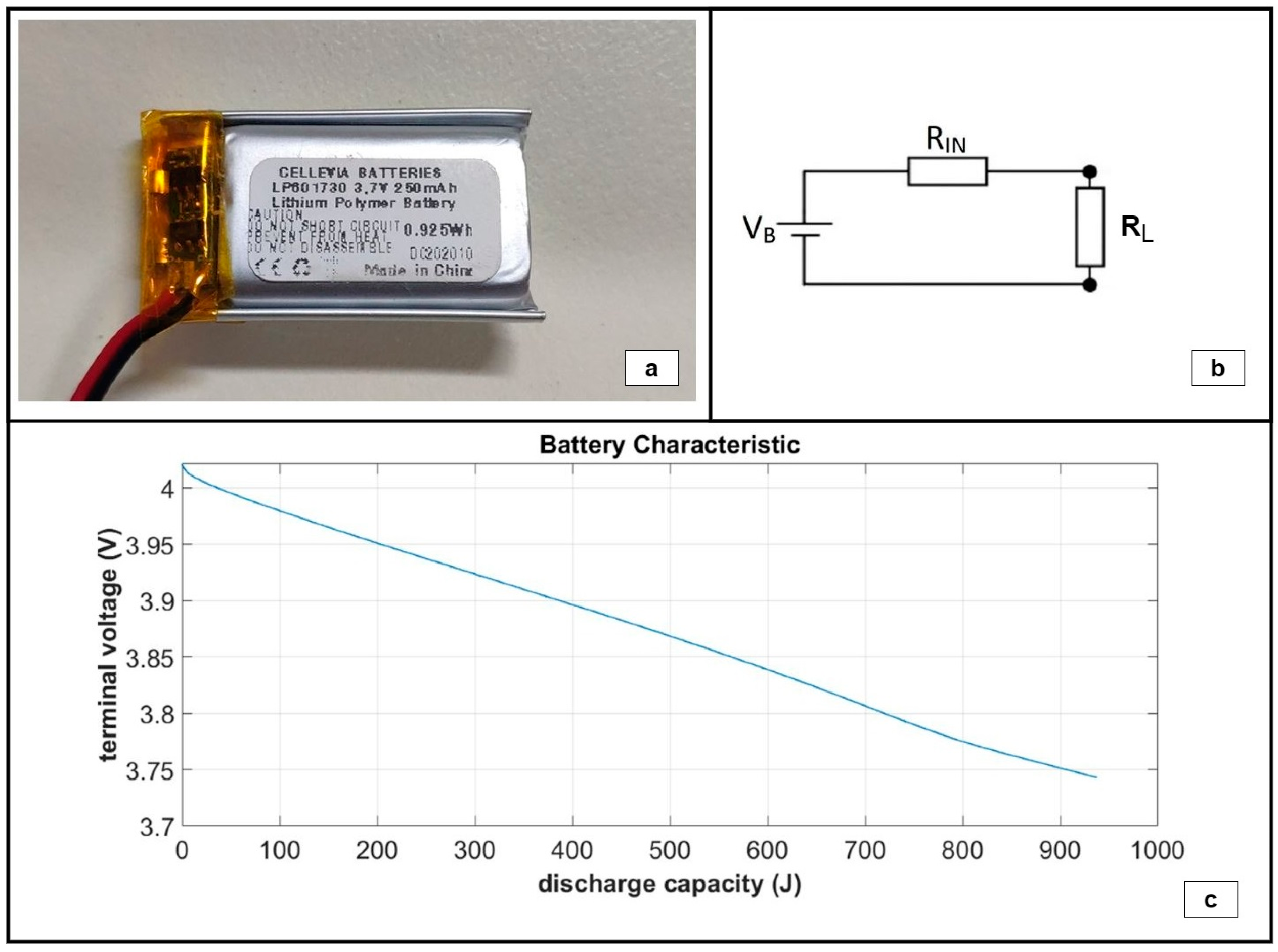
2.4. Data Acquisition and Wireless Transmission Unit (DAWTU)
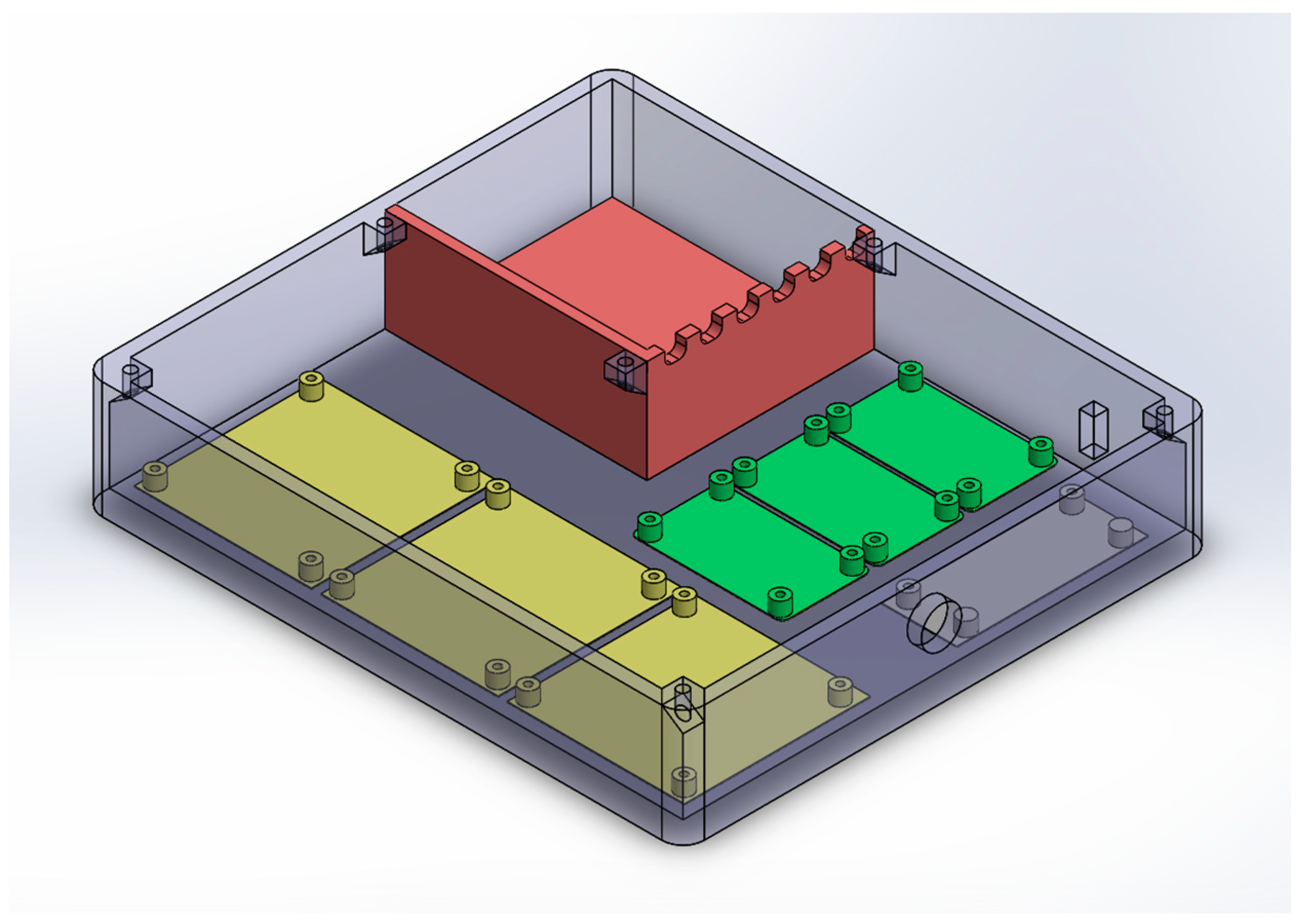
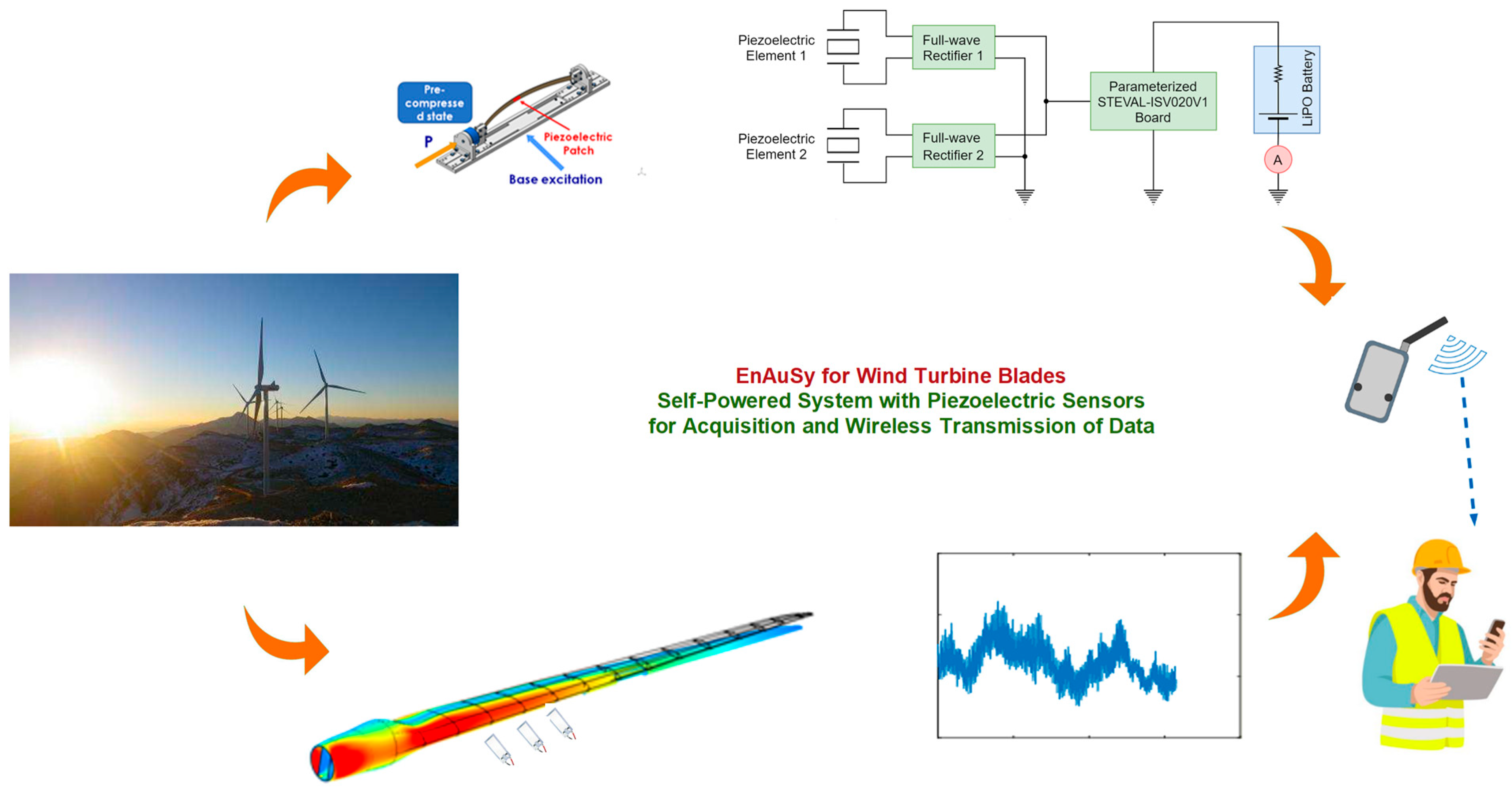
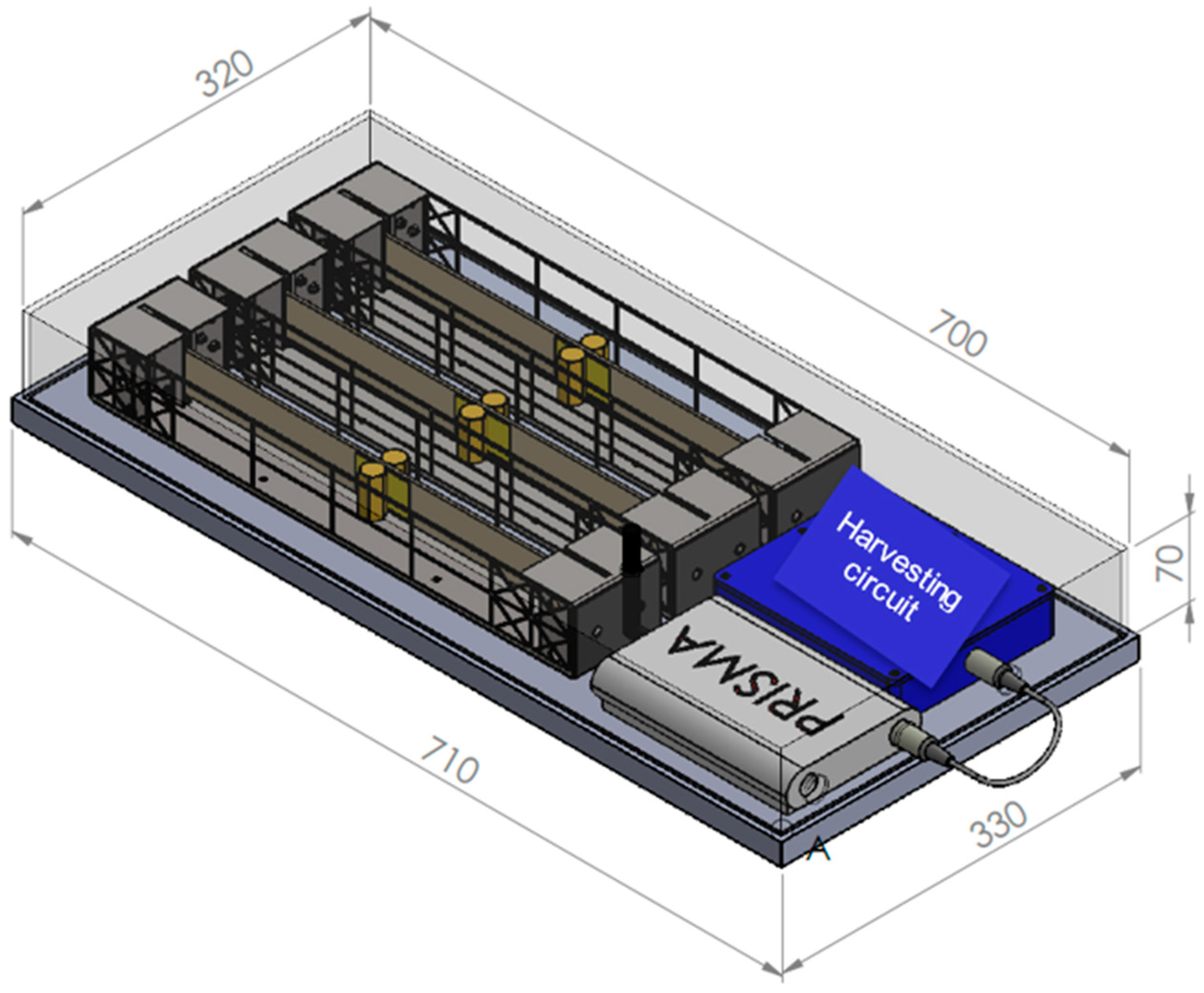
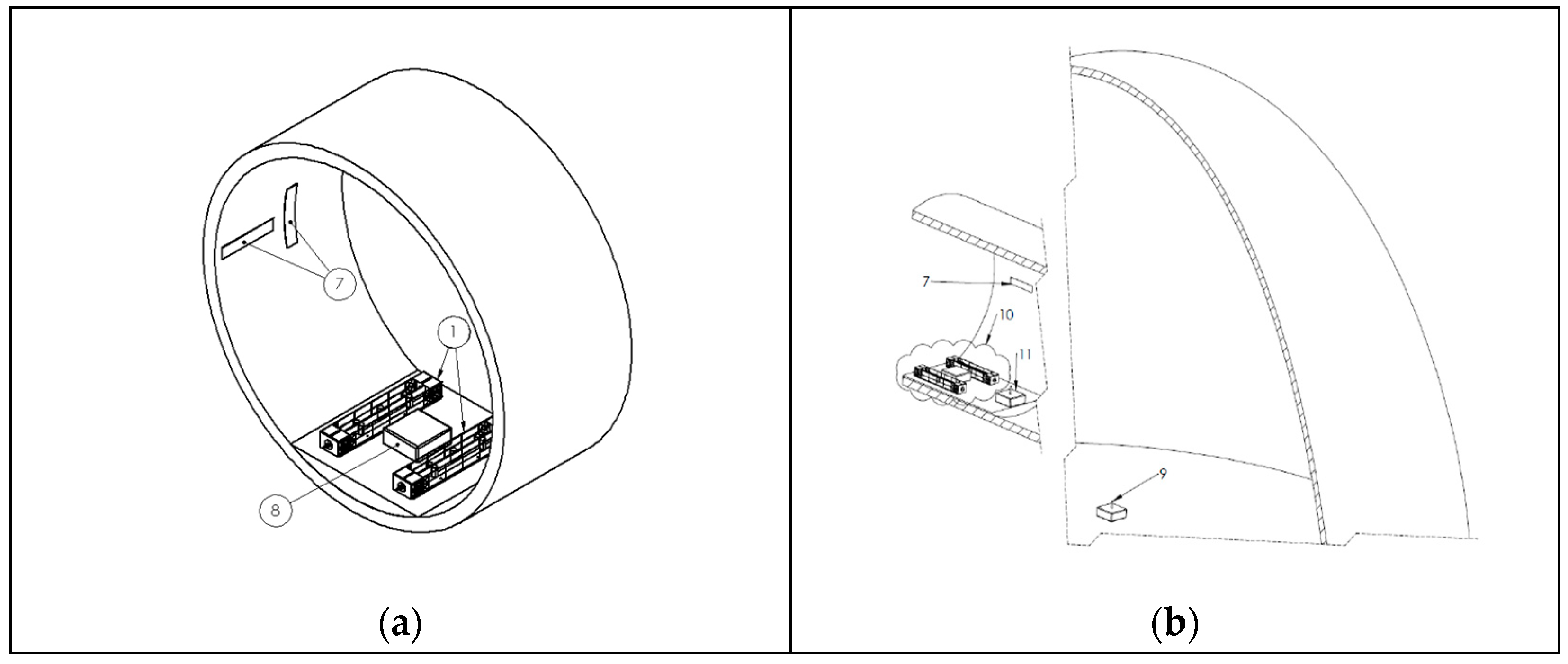
3. Integrated Blade Monitoring System
4. Ground Tests
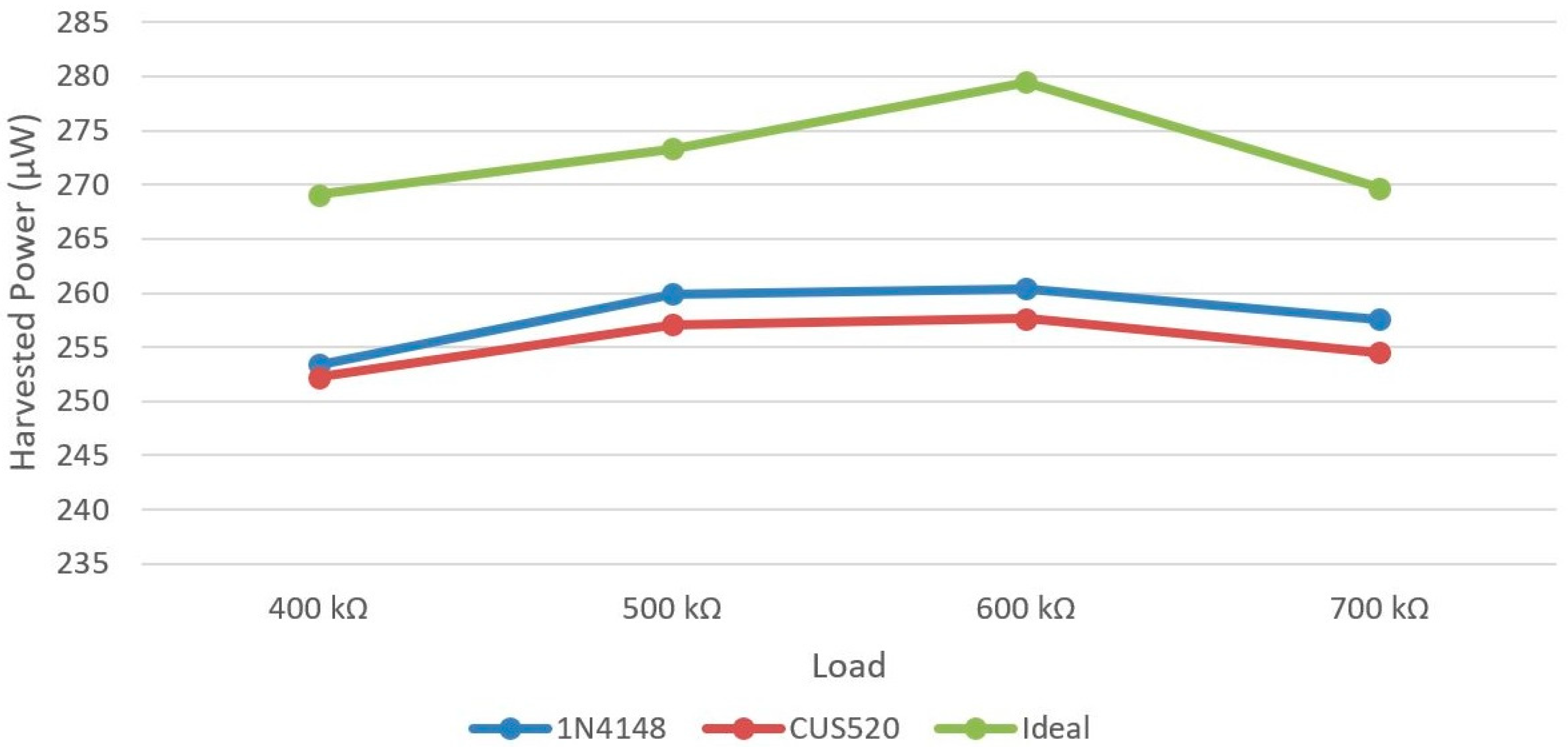
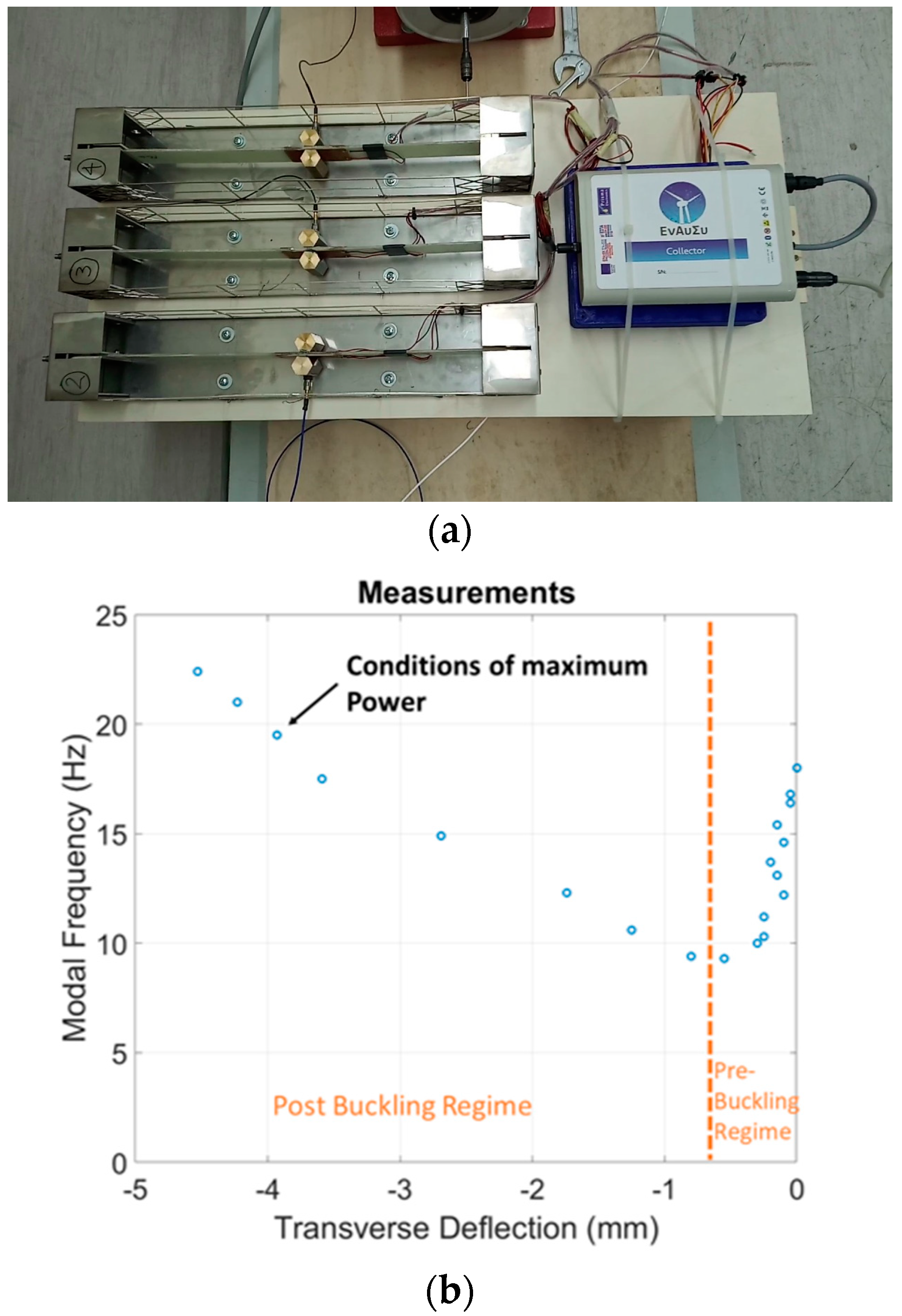
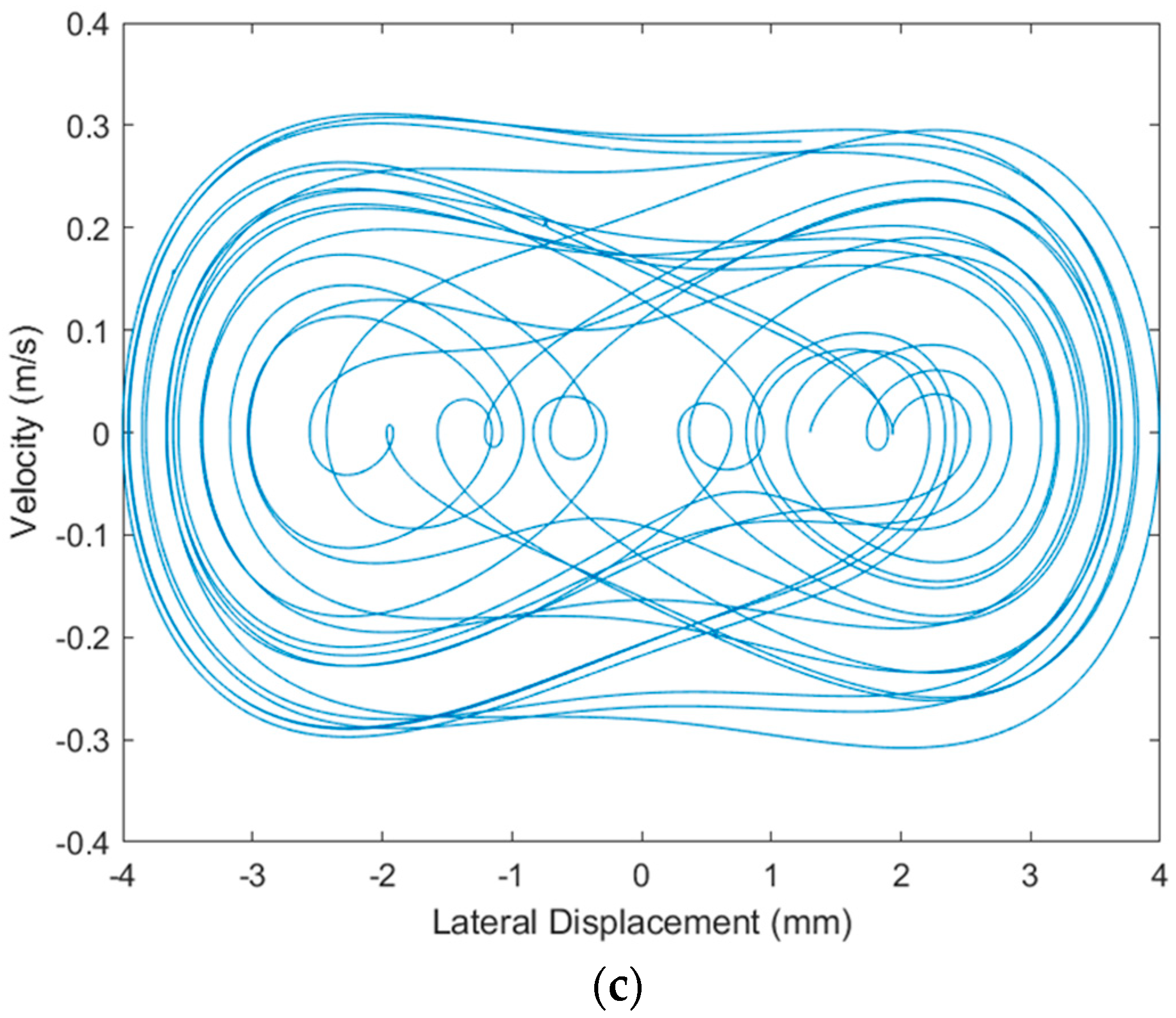
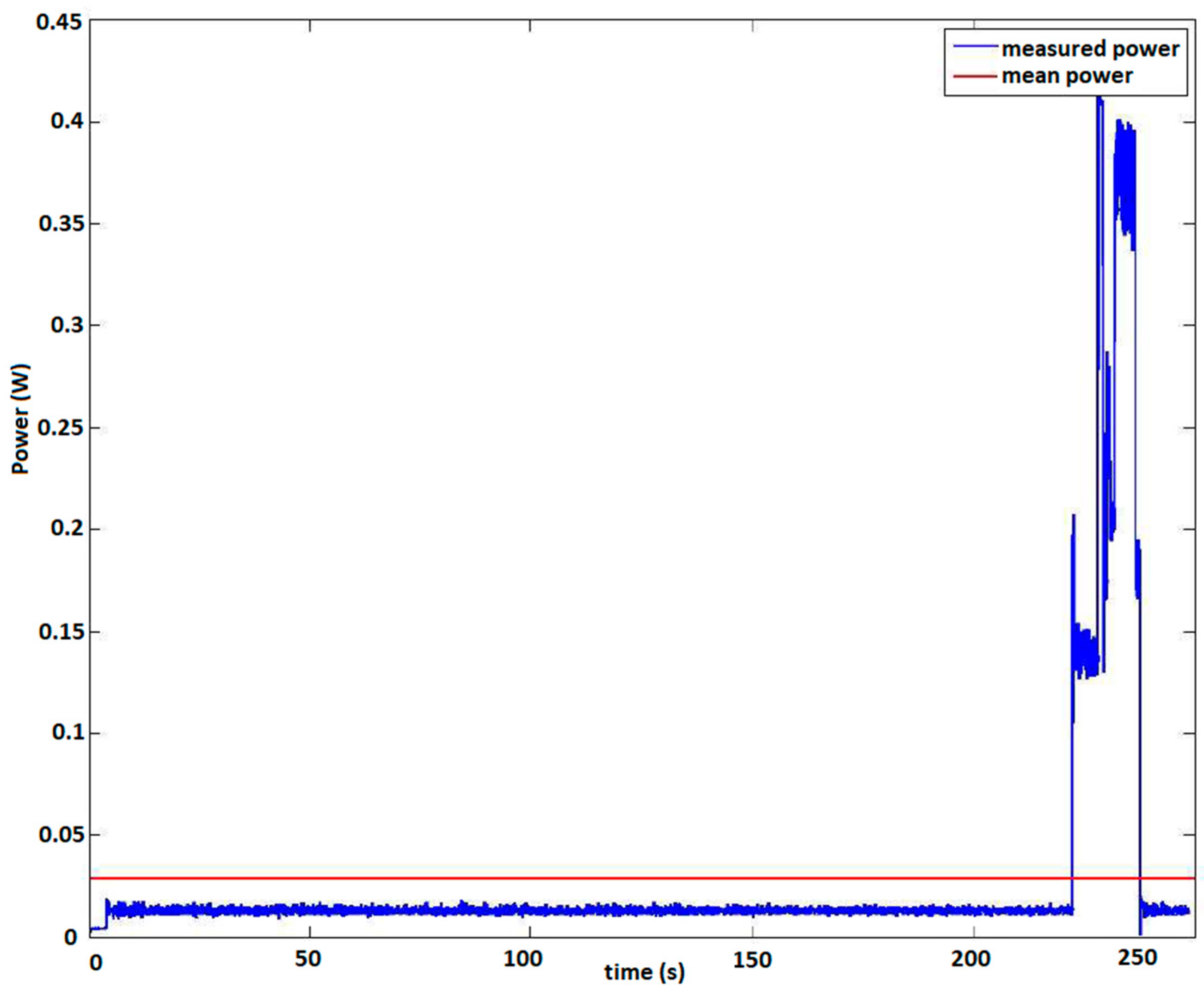
4.1. Harvesting Subsystem
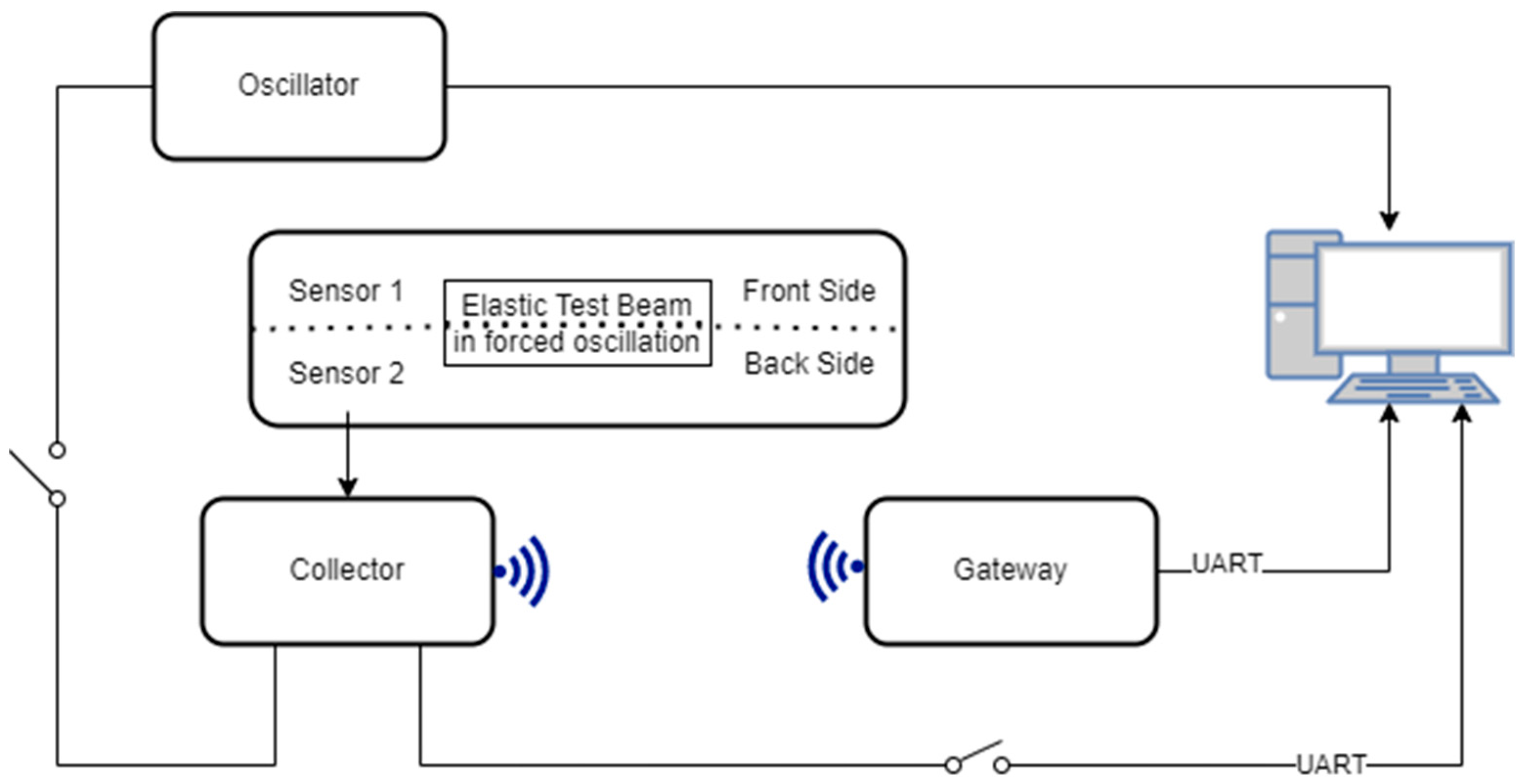
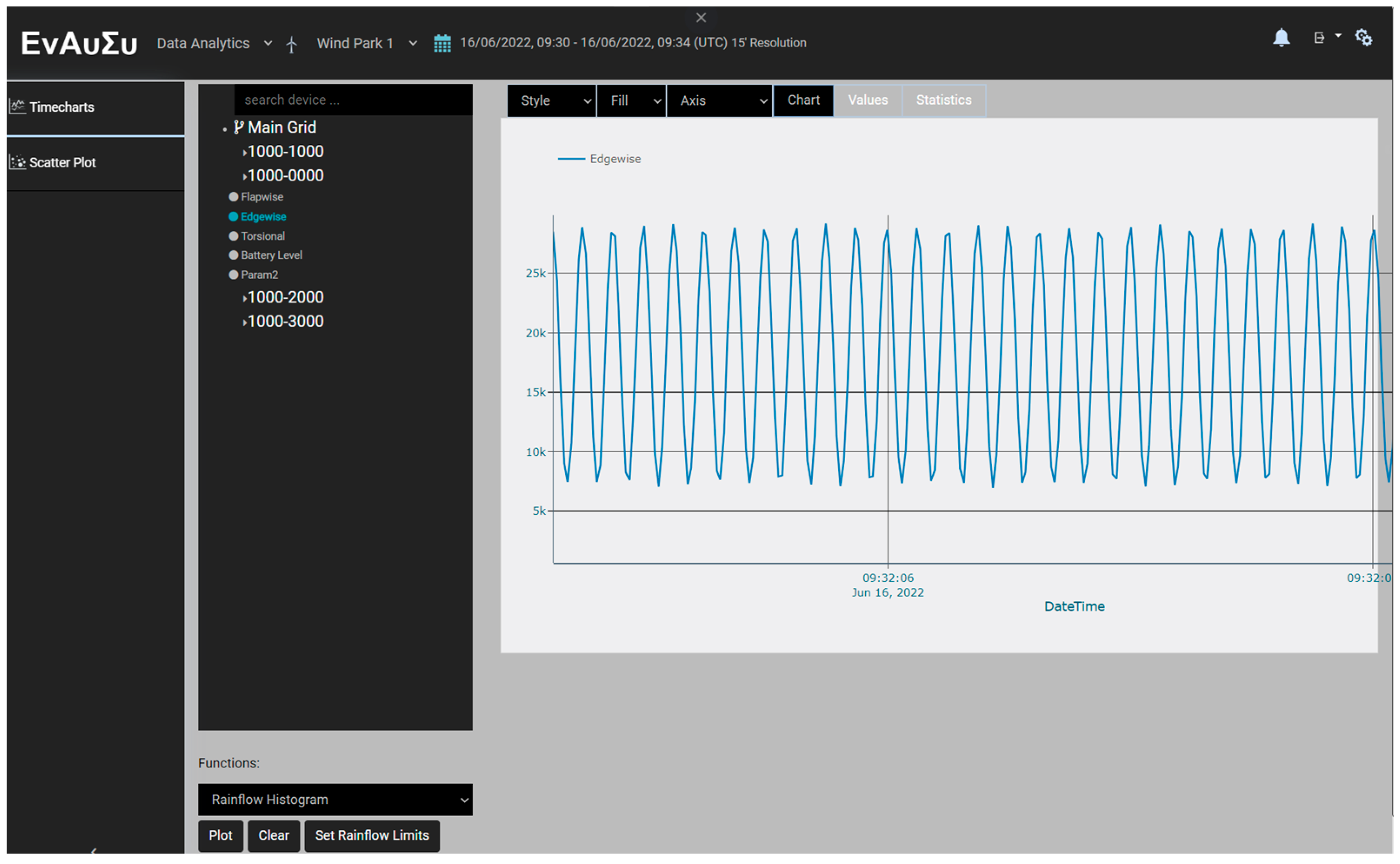
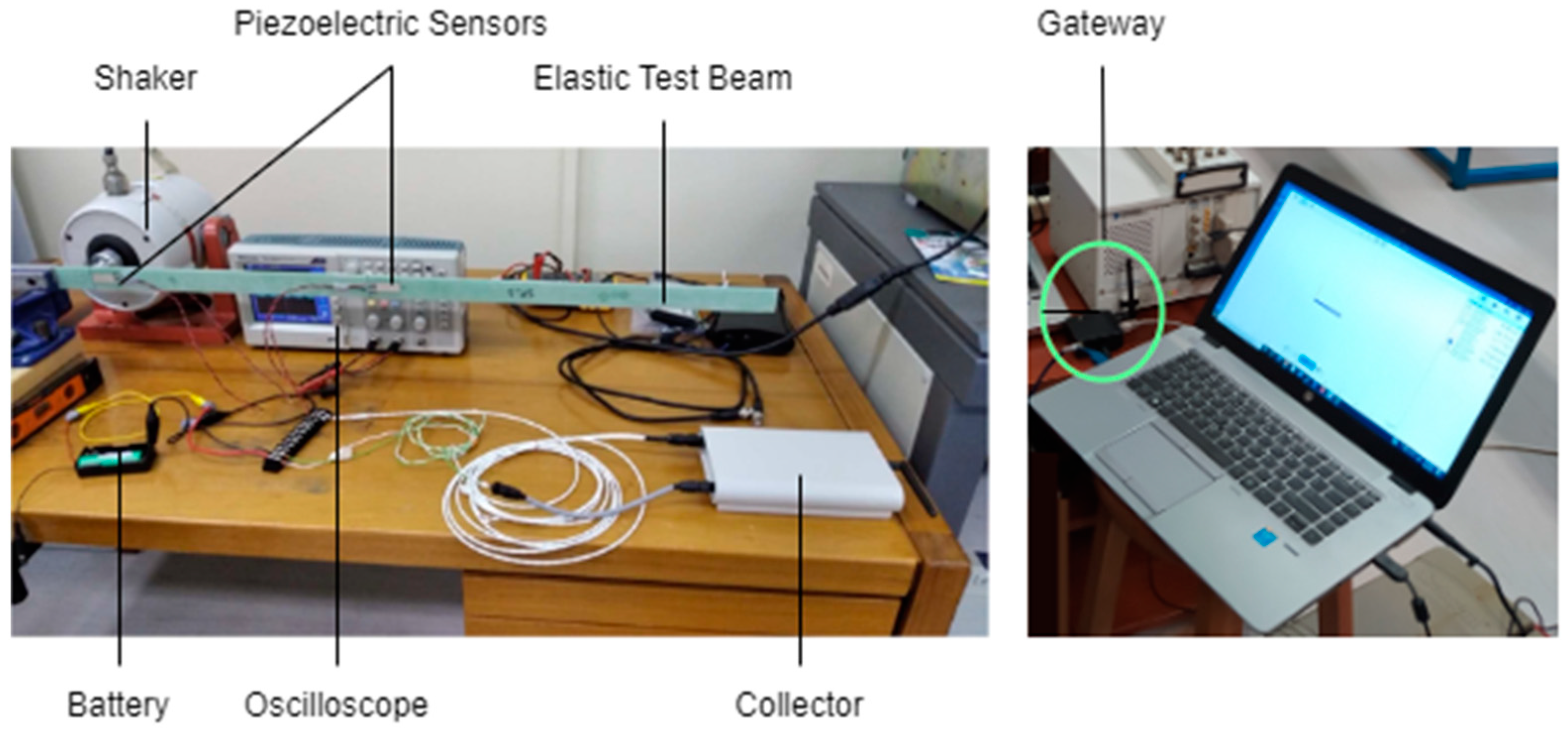
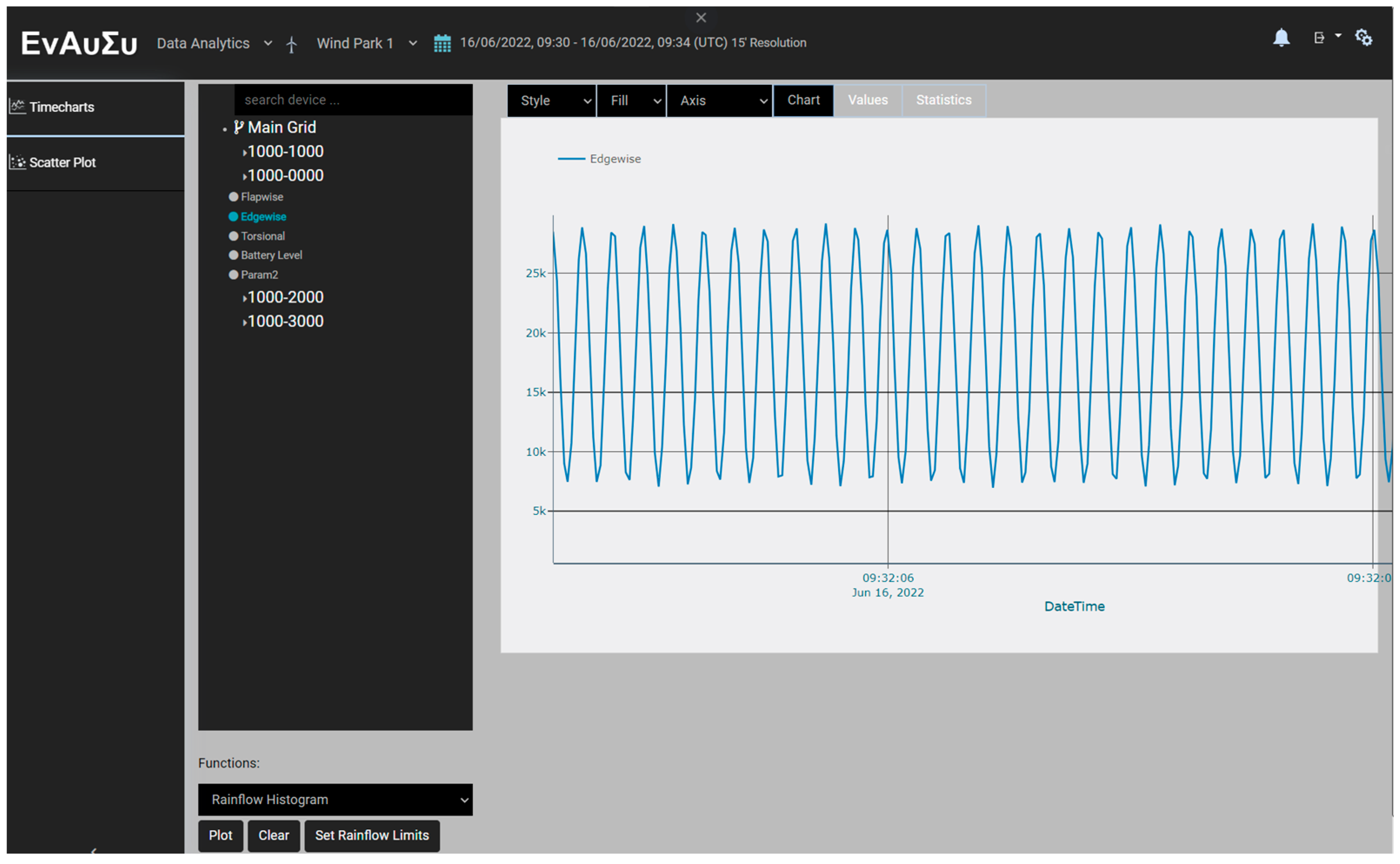
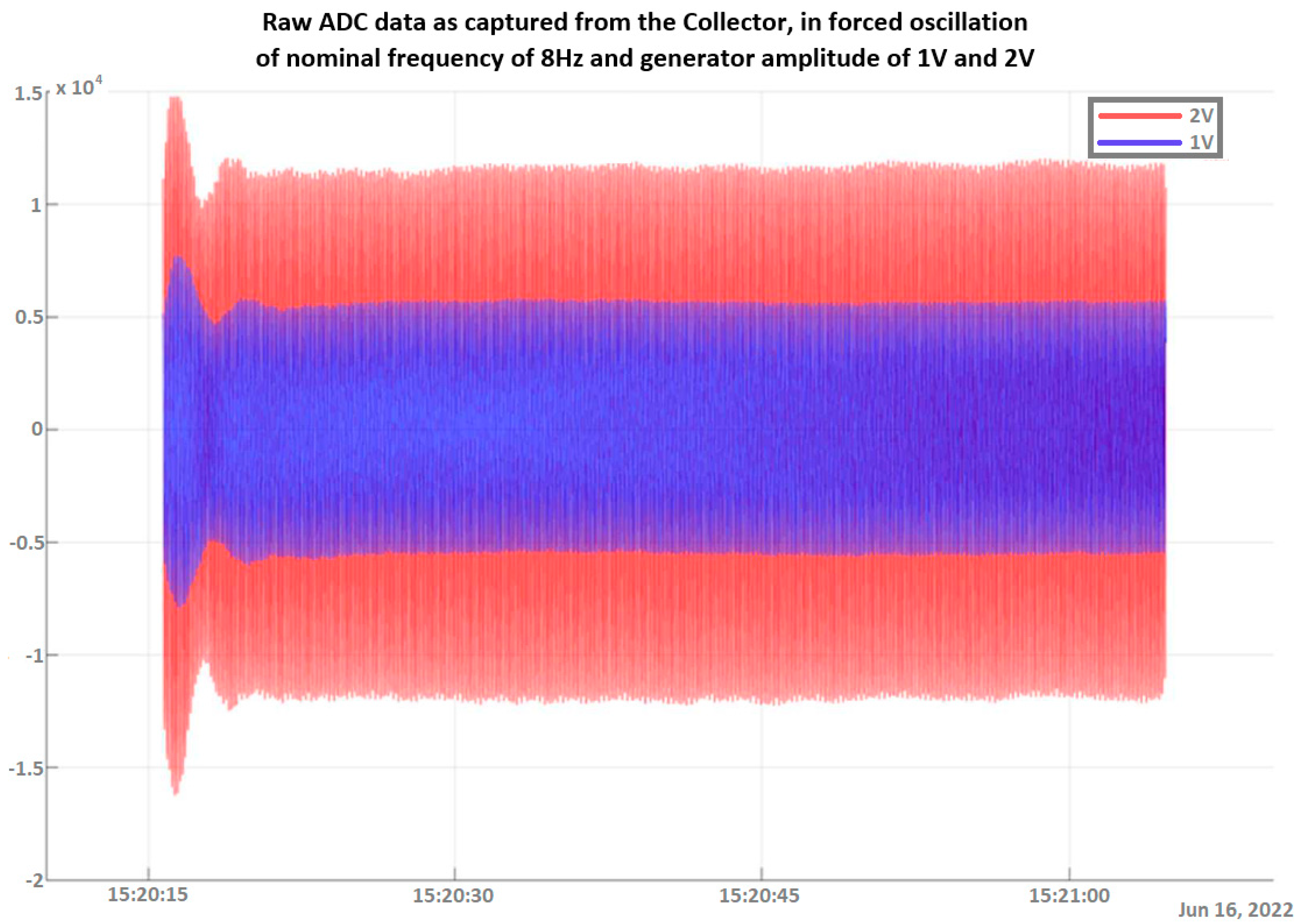
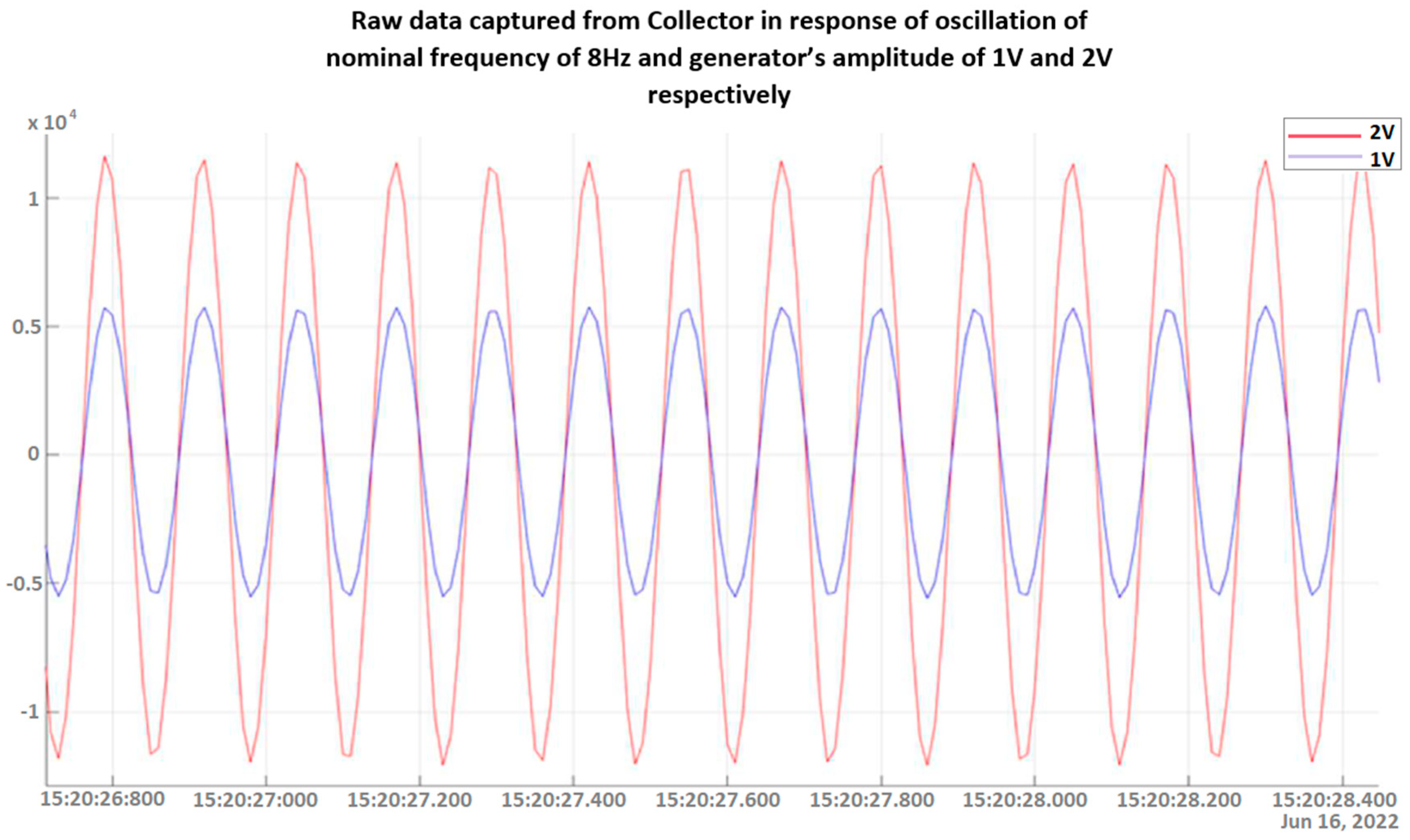
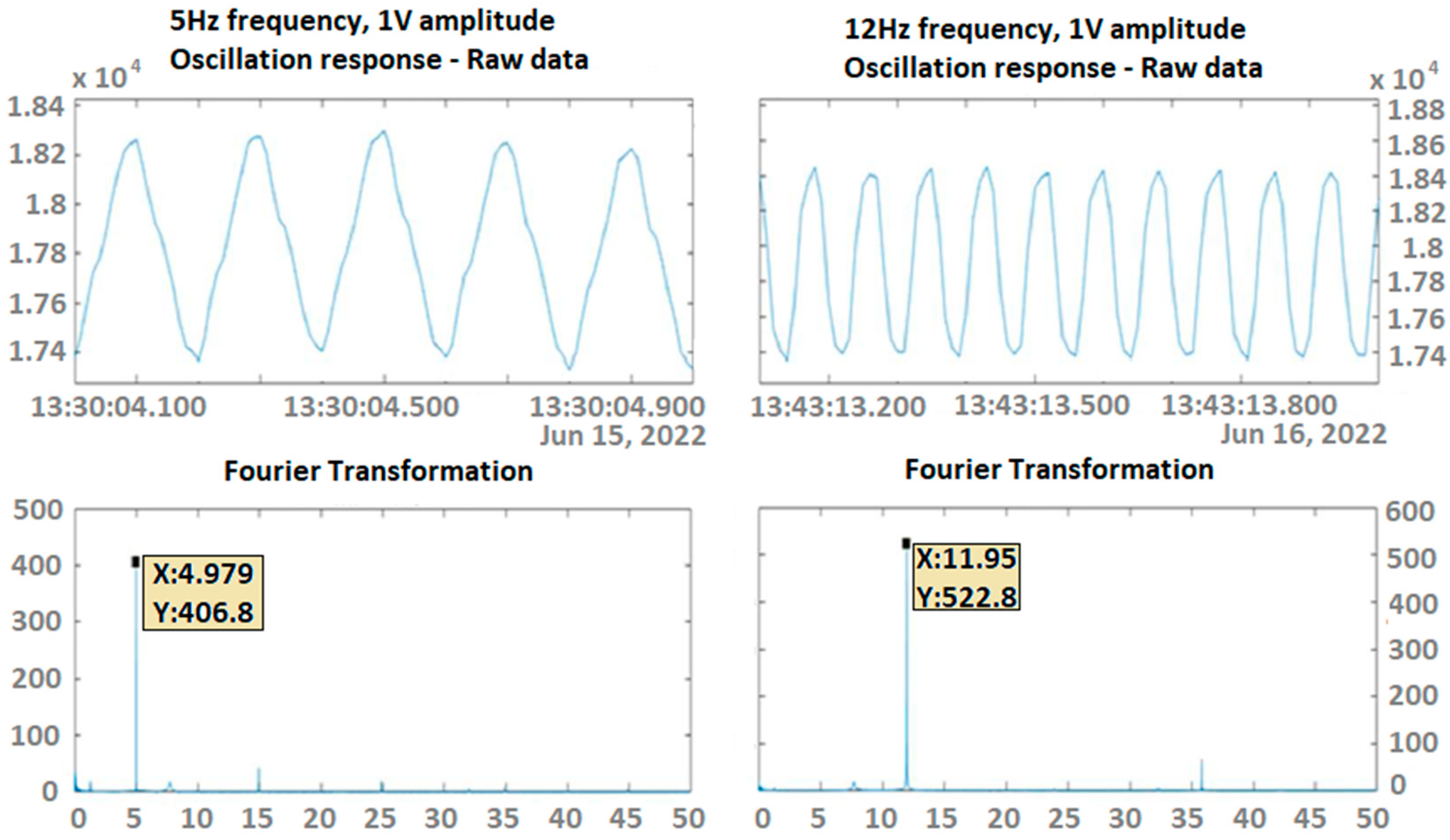
4.2. Data Acquisition and Wireless Transmission Subsystem
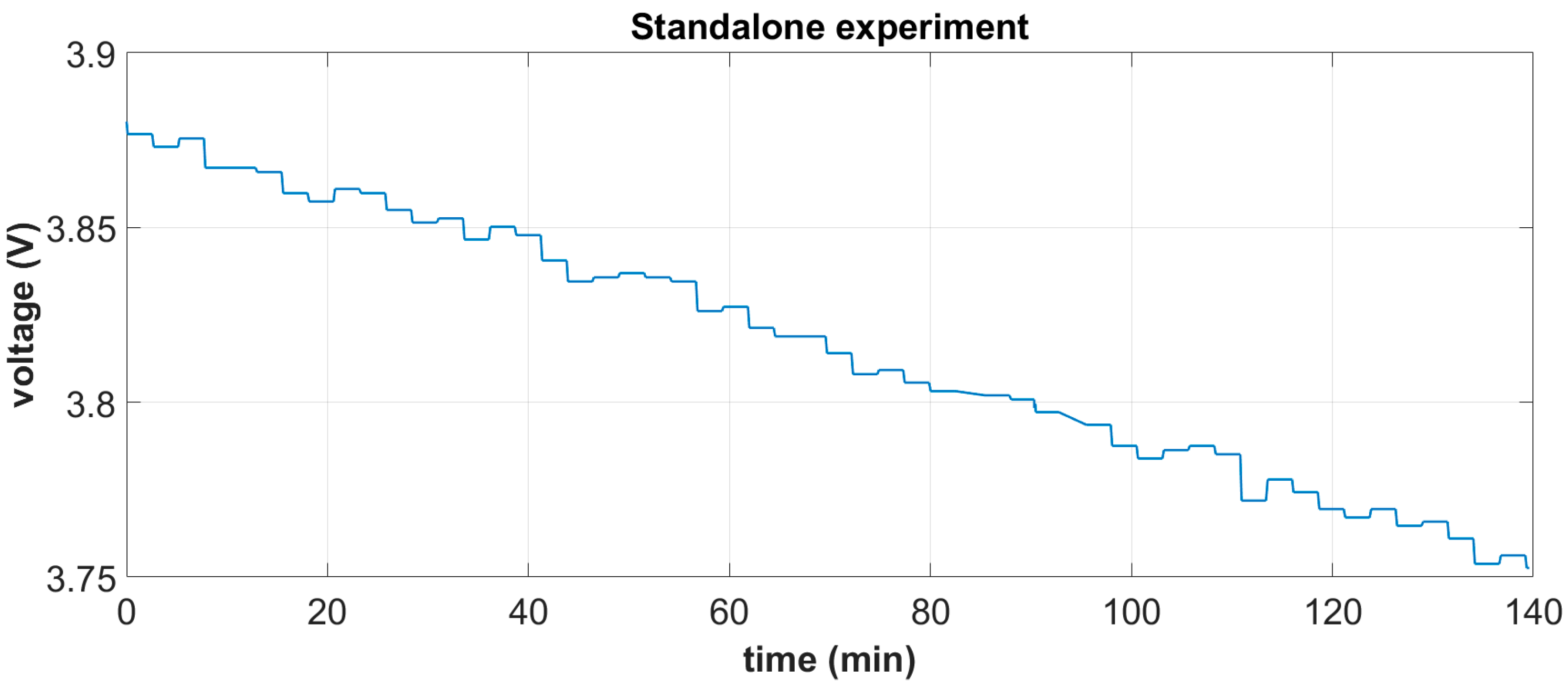
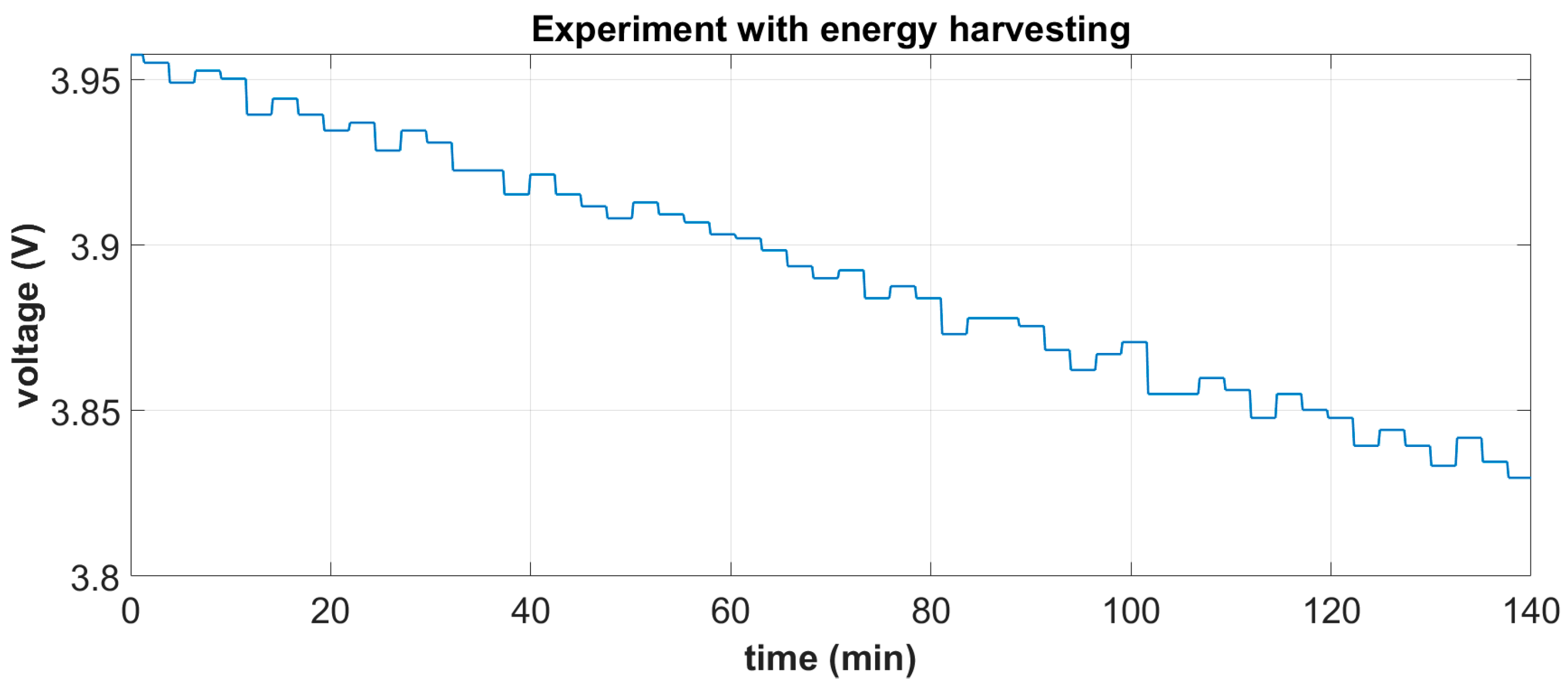
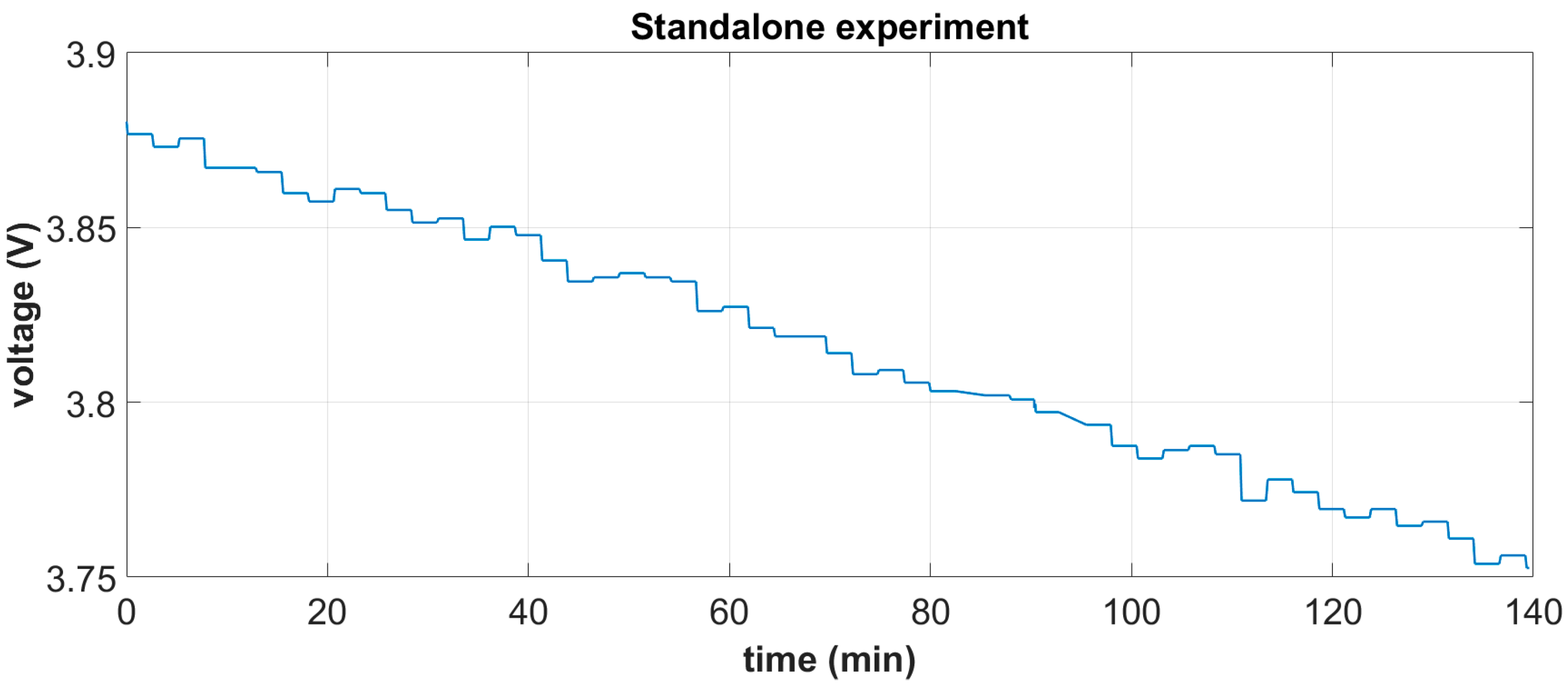
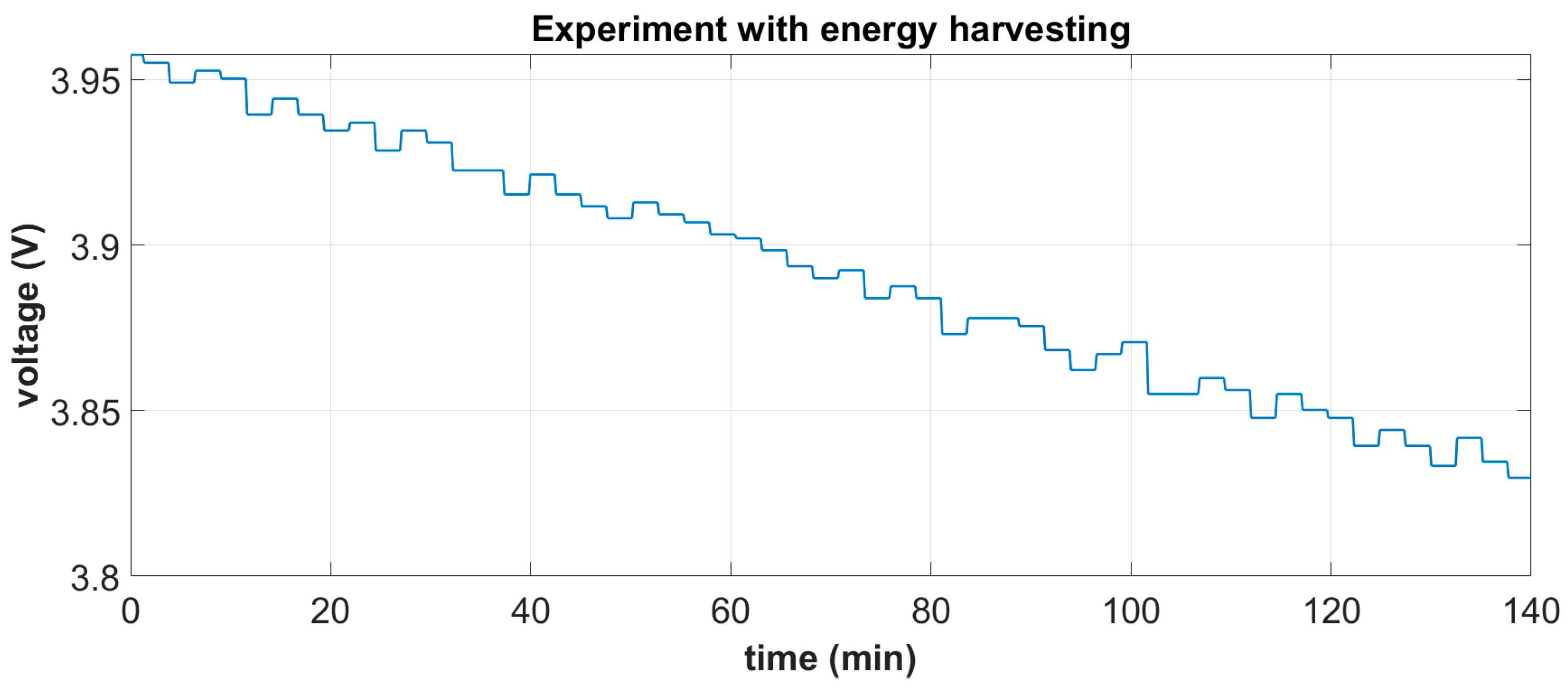
4.3. Integrated System
5. Summary and Conclusions
6. Patents
Supplementary Materials
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
List of Abbreviations
| ADC | Analog-to-digital converter |
| BLE | Bluetooth Low Energy |
| COTS | Commercial off-the-shelf |
| CU | Control unit |
| DAWTU | Data Acquisition and Wireless Transmission Unit |
| EMCU | ElectroMechanical Energy Conversion Unit |
| EnAuSy | Energy Autonomous System Based on Piezoelectric Energy Harvesting |
| EHCU | Energy-Harvesting Circuit Unit |
| IoT | Internet of Things |
| JSON | Java Script Open Notation |
| LiPo | Lithium-polymer battery |
| MQTT | Message Ques Telemetry Transport |
| PEH | Piezoelectric Energy Harvester |
| SCU | Signal Conditioning Unit |
| SD | Secure digital |
| WCU | Wireless communication unit |
References
- Griffith, D.T. Structural Health and Prognostics Management for Offshore Wind Plants; SANDIA National Laboratories Technical Report, SAND2015-2593; Sandia National Lab. (SNL-NM): Albuquerque, NM, USA, 2015.
- Cook-Chennault, K.A.; Thambi, N.; Sastry, A.M. Powering MEMS portable devices—A review of non-regenerative and regenerative power supply systems with special emphasis on piezoelectric energy harvesting systems. Smart Mater. Struct. 2008, 17, 043001. [Google Scholar] [CrossRef]
- Covaci, C.; Gontean, A. Piezoelectric energy harvesting solutions: A review. Sensors 2020, 20, 3512. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Fu, H.; Sun, L.; Lee, C.; Yeatman, E.M. Hybrid energy harvesting technology: From materials, structural design, system integration to applications. Renew. Sustain. Energy Rev. 2021, 137, 110473. [Google Scholar] [CrossRef]
- Han, Y.; He, L.; Sun, L.; Wang, H.; Zhang, Z.; Cheng, G. A review of piezoelectric–electromagnetic hybrid energy harvesters for different applications. Rev. Sci. Instrum. 2023, 94, 101501. [Google Scholar] [CrossRef]
- Qi, L.; Pan, H.; Pan, Y.; Luo, D.; Yan, J.; Zhang, Z. A review of vibration energy harvesting in rail transportation field. iScience 2022, 25, 103849. [Google Scholar] [CrossRef]
- Ma, X.; Zhou, S. A review of flow-induced vibration energy harvesters. Energy Convers. Manag. 2022, 254, 115223. [Google Scholar] [CrossRef]
- Zheng, X.; He, L.; Wang, S.; Liu, X.; Liu, R.; Cheng, G. A review of piezoelectric energy harvesters for harvesting wind energy. Sens. Actuators A Phys. 2023, 352, 114190. [Google Scholar] [CrossRef]
- Beeby, S.P.; Wang, L.; Zhu, D.; Weddell, A.S.; Merrett, G.V.; Stark, B.; Szarka, G.; Al-Hashimi, B.M. A comparison of power output from linear and nonlinear kinetic energy harvesters using real vibration data. Smart Mater. Struct. 2013, 22, 075022. [Google Scholar] [CrossRef]
- Daqaq, M.F.; Masana, R.; Erturk, A.; Quinn, D.D. On the role of nonlinearities in vibratory energy harvesting: A critical review and discussion. Appl. Mech. Rev. 2014, 66, 040801. [Google Scholar] [CrossRef]
- Jia, Y. Review of nonlinear vibration energy harvesting: Duffing, bistability, parametric, stochastic and others. J. Intell. Mater. Syst. Struct. 2020, 31, 921–944. [Google Scholar] [CrossRef]
- Liang, H.; Hao, G.; Olszewski, O.Z. A review on vibration-based vibration energy harvesting from the aspect of compliant mechanisms. Sens. Actuators A Phys. 2021, 331, 112743. [Google Scholar] [CrossRef]
- Le, M.Q.; Capsal, J.-F.; Lallart, M.; Hebrard, Y.; Van Der Ham, A.; Reffe, N.; Geynet, L.; Cottinet, P.-J. Review on energy harvesting for structural health monitoring in aeronautical applications. Prog. Aerosp. Sci. 2015, 79, 147–157. [Google Scholar] [CrossRef]
- Trigona, C.; Ando, B.; Baglio, S. Measurements and investigations of helicopter-induced vibrations for kinetic energy harvesters. In Proceedings of the 2019 IEEE Sensors Applications Symposium (SAS), Sophia Antipolis, France, 11–13 March 2019; pp. 1–5. [Google Scholar]
- Zhou, Z.; Zhang, H.; Qin, W.; Zhu, P.; Du, W. Improving energy harvesting from bridge vibration excited by moving vehicles with a bi-stable harvester. Materials 2022, 15, 2237. [Google Scholar] [CrossRef]
- Yang, T.; Zhang, Y.; Zhou, S.; Fan, H.; Zhang, X. Wideband energy harvesting using nonlinear energy sink with bio-inspired hexagonal skeleton structure. Commun. Nonlinear Sci. Numer. Simul. 2022, 111, 106465. [Google Scholar] [CrossRef]
- Hou, Z.; Zha, W.; Wang, H.; Liao, W.-H.; Bowen, C.R.; Cao, J. Bistable energy harvesting backpack: Design, modeling, and experiments. Energy Convers. Manag. 2022, 259, 115441. [Google Scholar] [CrossRef]
- Yang, Z.; Zhou, S.; Zu, J.; Inman, D. High-performance piezoelectric energy harvesters and their applications. Joule 2018, 2, 642–697. [Google Scholar] [CrossRef]
- Fu, H.; Yeatman, E.M. Rotational energy harvesting using bi-stability and frequency up-conversion for low-power sensing applications: Theoretical modelling and experimental validation. Mech. Syst. Signal Process. 2019, 125, 229–244. [Google Scholar] [CrossRef]
- Sneller, A.J.; Cette, P.; Mann, B.P. Experimental investigation of a post-buckled piezoelectric beam with an attached central mass used to harvest energy. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2011, 225, 497–509. [Google Scholar] [CrossRef]
- Hu, N.; Burgueño, R. Buckling-induced smart applications: Recent advances and trends. Smart Mater. Struct. 2015, 24, 063001. [Google Scholar] [CrossRef]
- Alhadidi, A.H.; Daqaq, M.F. A broadband bi-stable flow energy harvester based on the wake-galloping phenomenon. Appl. Phys. Lett. 2016, 109, 033904. [Google Scholar] [CrossRef]
- Zhao, C.; Hu, G.; Yang, Y. A cantilever-type vibro-impact triboelectric energy harvester for wind energy harvesting. Mech. Syst. Signal Process. 2022, 177, 109185. [Google Scholar] [CrossRef]
- Li, H.; Dong, B.; Cao, F.; Qin, W.; Ding, H.; Chen, L. Nonlinear dynamical and harvesting characteristics of bistable energy harvester under hybrid base vibration and galloping. Commun. Nonlinear Sci. Numer. Simul. 2023, 125, 107400. [Google Scholar] [CrossRef]
- Liu, X.; Jia, H.; Li, M.; Li, Y.; Tao, Y.; Dai, F. Piezoelectric wind energy harvester of bi-stable hybrid symmetric laminates. Compos. Sci. Technol. 2023, 242, 110198. [Google Scholar] [CrossRef]
- Zhao, L. Synchronization extension using a bistable galloping oscillator for enhanced power generation from concurrent wind and base vibration. Appl. Phys. Lett. 2020, 116, 053904. [Google Scholar] [CrossRef]
- Pan, J.; Zhang, X.; Qin, W.; Xu, H.; Tian, H.; Zhu, F.; Guo, Y. A broadband zigzag-shaped energy harvester for both wind energy and vibration energy: Modeling and experimental verification. J. Phys. D Appl. Phys. 2023, 56, 144002. [Google Scholar] [CrossRef]
- Li, J.; Han, X.; Rui, X.; Li, H.; Zhang, Y.; Zhang, W.; Zeng, Z. Design and analysis of the piezoelectric-electromagnetic energy harvester based on magnetically coupled structures. Ceram. Int. 2023, 49, 35597–35607. [Google Scholar] [CrossRef]
- Ansari, M.H.; Karami, M.A. Energy harvesting from controlled buckling of piezoelectric beams. Smart Mater. Struct. 2015, 24, 115005. [Google Scholar] [CrossRef]
- Zhang, H.; Qin, W.; Zhou, Z.; Zhu, P.; Du, W. Piezomagnetoelastic energy harvesting from bridge vibrations using bi-stable characteristics. Energy 2023, 263, 125859. [Google Scholar] [CrossRef]
- Ansari, M.H.; Karami, M.A. Experimental investigation of fan-folded piezoelectric energy harvesters for powering pacemakers. Smart Mater. Struct. 2017, 26, 065001. [Google Scholar] [CrossRef]
- Qian, F.; Liu, M.; Huang, J.; Zhang, J.; Jung, H.; Deng, Z.D.; Hajj, M.R.; Zuo, L. Bio-inspired bistable piezoelectric energy harvester for powering animal telemetry tags: Conceptual design and preliminary experimental validation. Renew. Energy 2022, 187, 34–43. [Google Scholar] [CrossRef]
- Clingman, D.J.; Ruggeri, R.T. Snap-Acting or Bistable Piezoelectric Actuator and Generator. (Inventors) and Boeing Company (Applicant). Patent GB 2438242A, 15 May 2008. [Google Scholar]
- Gammaitoni, L. Bistable Piezoelectric Generator. (Inventor) and Wisepower SRL (Applicant). Patent EP 2485287 A2, 8 August 2012. [Google Scholar]
- Burgueno, R.; Lajnef, N. Energy Harvesting Devices for Low Frequency Applications. (Inventors) and Board of Trustees of Michigan State University (Applicant). Patent US 2014/0070670 A1, 13 March 2014. [Google Scholar]
- Yao, M.; Li, Y.; Zhang, W. Bistable Piezoelectric Cantilever Vibration Energy Generator Based on Spherical Composite Structure and Partial Separation of Different Layers. (Inventors) and Beijing University of Technology (Applicant). Patent US 2016/0254437 A1, 1 September 2016. [Google Scholar]
- Singh, K.A.; Kumar, R.; Weber, R.J. Broad Spectrum and Wide amplitude Range Vibration Energy Harvester: Bistable Piezoelectric Transduction, Synchronized Extraction, Self-Actuated Adaptation. (Inventors) and Iowa State University (Applicant). Patent US 10,224,835 B1, 5 March 2019. [Google Scholar]
- Plagianakos, T.S.; Leventakis, N.; Chrysochoidis, N.A.; Kardarakos, G.C.; Margelis, N.; Bolanakis, G.; Saravanos, D.A.; Papadopoulos, E.G. Piezoelectric energy harvester based on bistable response of a composite beam in post-buckling. Smart Mater. Struct. 2024; under review. [Google Scholar]
- Piezoceramic Technology. Available online: https://www.piceramic.com/en/ (accessed on 8 February 2023).
- Plagianakos, T.S.; Margelis, N.; Leventakis, N.; Bolanakis, G.; Vartholomeos, P.; Papadopoulos, E.G. Finite element-based assessment of energy harvesting in composite beams with piezoelectric transducers. Proc. Inst. Mech. Eng. Part L J. Mater. Des. Appl. 2022, 236, 473–488. [Google Scholar] [CrossRef]
- Kardarakos, G.C.; Chrysochoidis, N.A.; Varelis, D.; Margelis, N.; Leventakis, N.; Plagianakos, T.S.; Bolanakis, G.; Saravanos, D.A.; Papadopoulos, E. Computational and experimental efficiency investigation of nonlinear energy harvesting systems based on monostable and bistable piezoelectric beams. In Proceedings of the ASME 2021 Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS 2021), Virtual, 14–15 September 2021. [Google Scholar]
- Theodoropoulos, P.; Spandonidis, C.C.; Fassois, S. Use of convolutional neural networks for vessel performance optimization and safety enhancement. Ocean Eng. 2022, 248, 110771. [Google Scholar] [CrossRef]
- DT Series Elements with Lead Attachment. Available online: https://www.te.com/commerce/DocumentDelivery/DDEController?Action=showdoc&DocId=Data+Sheet%7FDT_Series_with_Riveted_Leads%7FA1%7Fpdf%7FEnglish%7FENG_DS_DT_Series_with_Riveted_Leads_A1.pdf%7FCAT-PFS0005 (accessed on 24 January 2024).
- Minisense 100 NM (No Mass) Vibration Sensor. Available online: https://www.te.com/commerce/DocumentDelivery/DDEController?Action=showdoc&DocId=Data+Sheet%7FPiezo_Minisense_100-NM%7FA1%7Fpdf%7FEnglish%7FENG_DS_Piezo_Minisense_100-NM_A1.pdf%7FCAT-PFS0011 (accessed on 24 January 2024).
- ASTM E1049-85; (Reapproved 1997): Standard Practices for Cycle Counting in Fatigue Analysis. ASTM International: West Conshohocken, PA, USA, 1997.
- Kardarakos, G.C.; Chrysochoidis, N.A.; Varelis, D.; Saravanos, D.A. Numerical and experimental investigation of the response of electromechanical coupled piezoelectric prestressed beams and plates with attached external resistive circuits under nonlinear vibrations. Smart Mater. Struct. 2023, 32, 035019. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometrical Requirements | Form | Dimensional Limits | ||
| Length [mm] | Width [mm] | Height [mm] | ||
| Flat | 750 | 350 | 100 | |
| Operational Requirements | Max Weight [kg] | Max Frequency of Base Excitation [Hz] | Min Power Production [mW] | Resilience |
| 5 | 15 | 1 | Yes | |
| Sampling Frequency | Sampled Data Resolution | Data Process | No. of Sensors per Blade | |
| ≥10 samples/s | ≥13 bit | Rainflow Counting Method | ×3 (Capability to Reach 4) | |
| Other Requirements | Ease of Installation | Design Flexibility | Portability | Production Cost |
| Yes | Yes | Yes | Low | |
| Parameter | Value |
|---|---|
| R1 | 10 MΩ |
| R2 | 1.2 ΜΩ |
| R3 | 1.0 ΜΩ |
| C1 | 1 μF |
| Configuration Type | Power |
|---|---|
| Power consumption of DAWTU—electromechanical subsystem connected | 46 mW |
| Power consumption of DAWTU—standalone | 53.1 mW |
| Supplied power from the PEH unit | 7.182 mW |
| Percentage energy profit to the unit | 13.52% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Plagianakos, T.; Chrysochoidis, N.; Bolanakis, G.; Leventakis, N.; Margelis, N.; Sotiropoulos, M.; Giannopoulos, F.; Kardarakos, G.-C.; Spandonidis, C.; Papadopoulos, E.; et al. The Design and Ground Test Verification of an Energy-Efficient Wireless System for the Fatigue Monitoring of Wind Turbine Blades Based on Bistable Piezoelectric Energy Harvesting. Sensors 2024, 24, 2480. https://doi.org/10.3390/s24082480
Plagianakos T, Chrysochoidis N, Bolanakis G, Leventakis N, Margelis N, Sotiropoulos M, Giannopoulos F, Kardarakos G-C, Spandonidis C, Papadopoulos E, et al. The Design and Ground Test Verification of an Energy-Efficient Wireless System for the Fatigue Monitoring of Wind Turbine Blades Based on Bistable Piezoelectric Energy Harvesting. Sensors. 2024; 24(8):2480. https://doi.org/10.3390/s24082480
Chicago/Turabian StylePlagianakos, Theofanis, Nikolaos Chrysochoidis, Georgios Bolanakis, Nikolaos Leventakis, Nikolaos Margelis, Manolis Sotiropoulos, Fotis Giannopoulos, Grigoris-Christos Kardarakos, Christos Spandonidis, Evangelos Papadopoulos, and et al. 2024. "The Design and Ground Test Verification of an Energy-Efficient Wireless System for the Fatigue Monitoring of Wind Turbine Blades Based on Bistable Piezoelectric Energy Harvesting" Sensors 24, no. 8: 2480. https://doi.org/10.3390/s24082480
APA StylePlagianakos, T., Chrysochoidis, N., Bolanakis, G., Leventakis, N., Margelis, N., Sotiropoulos, M., Giannopoulos, F., Kardarakos, G.-C., Spandonidis, C., Papadopoulos, E., & Saravanos, D. (2024). The Design and Ground Test Verification of an Energy-Efficient Wireless System for the Fatigue Monitoring of Wind Turbine Blades Based on Bistable Piezoelectric Energy Harvesting. Sensors, 24(8), 2480. https://doi.org/10.3390/s24082480