
Optimal Design and Development of Magnetic Field Detection Sensor for AC Power Cable

 , ,
, ,
Abstract
1. Introduction
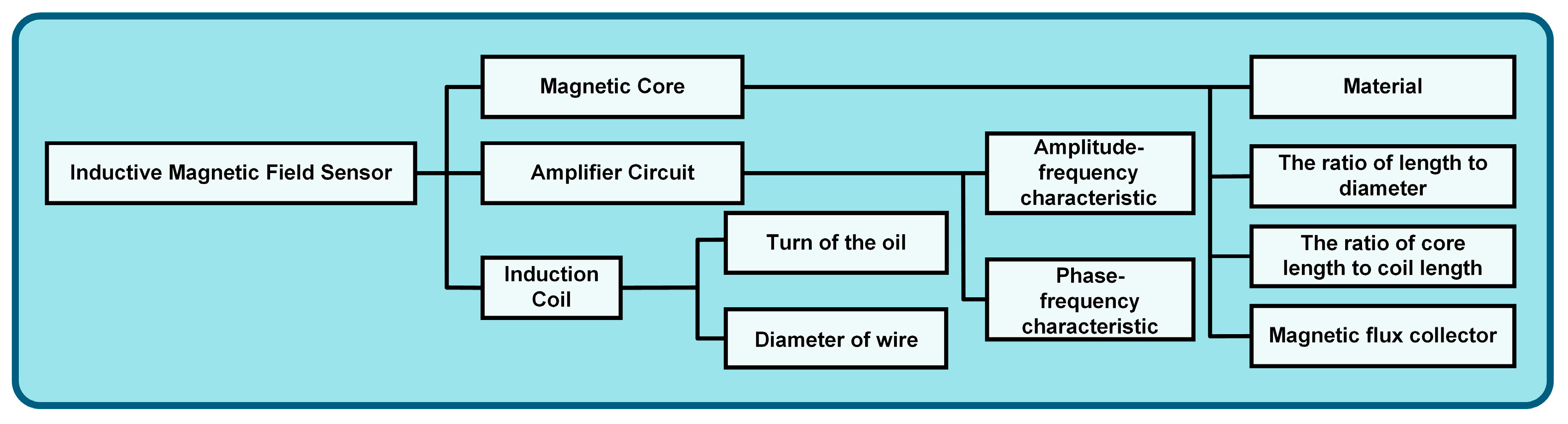
2. Principle of Magnetic Field Sensor
3. Design of Magnetic Core
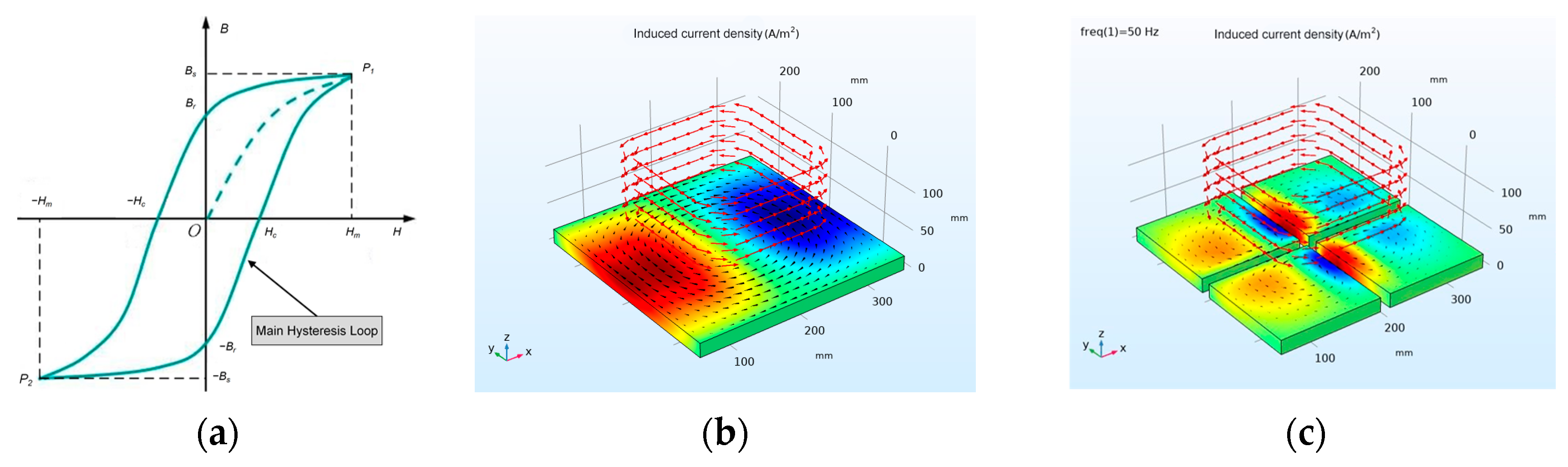
3.1. Selection of Magnetic Core Material
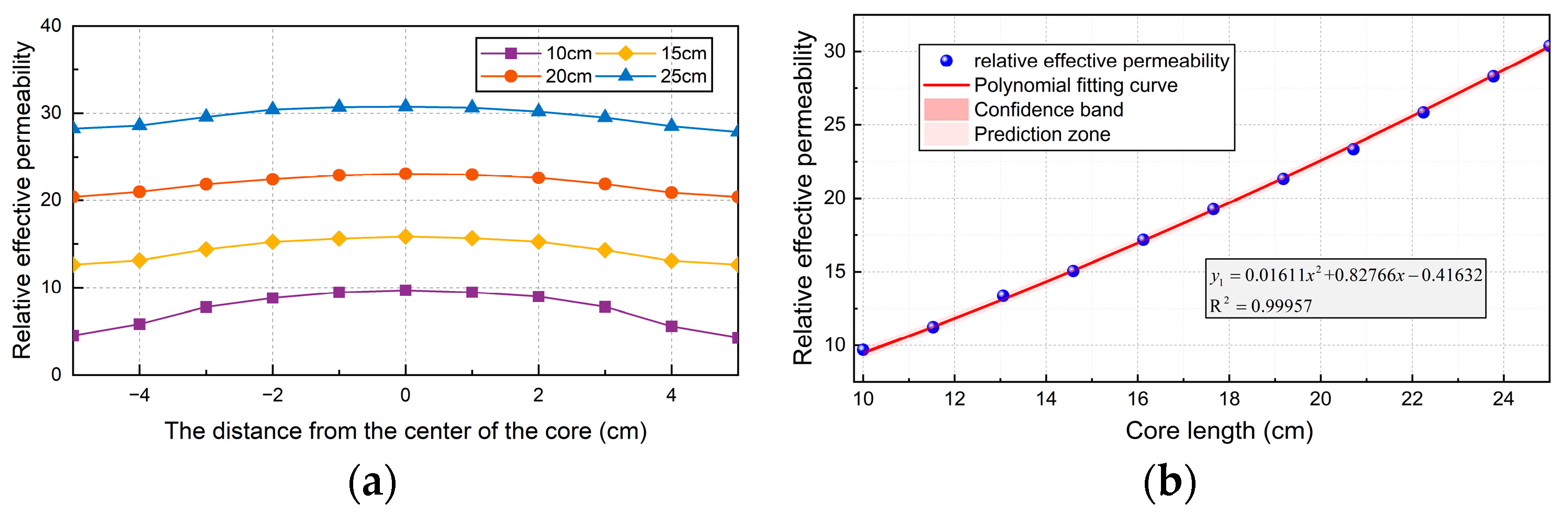
3.2. Determination of Magnetic Core Parameters
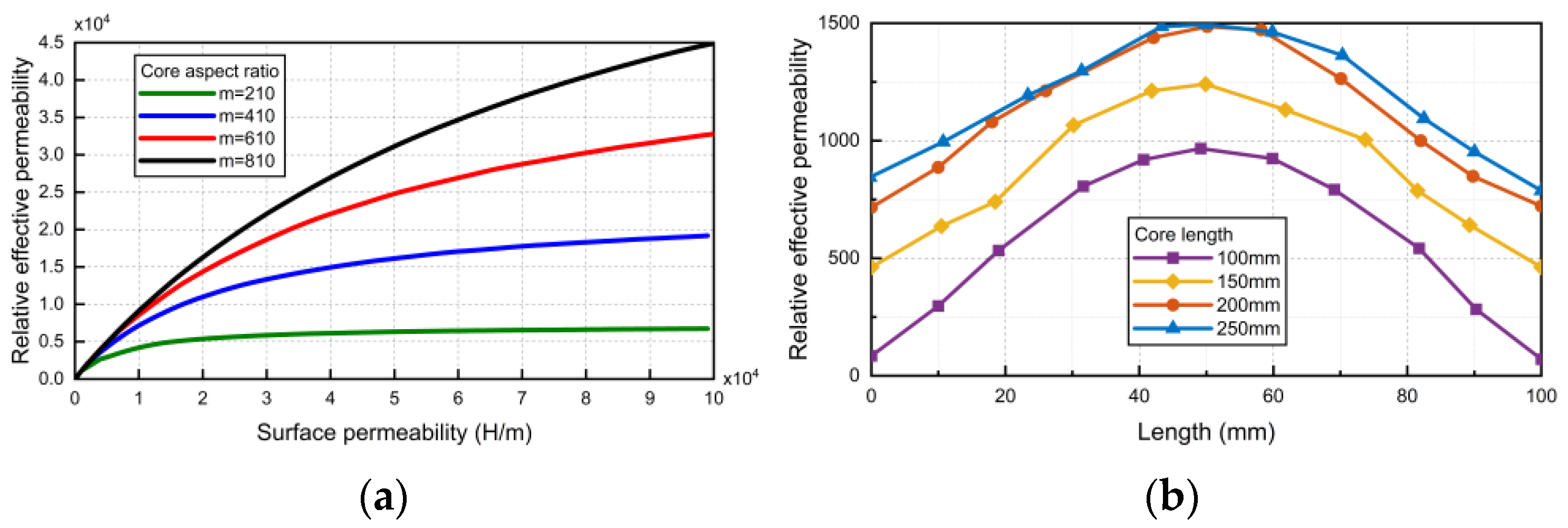
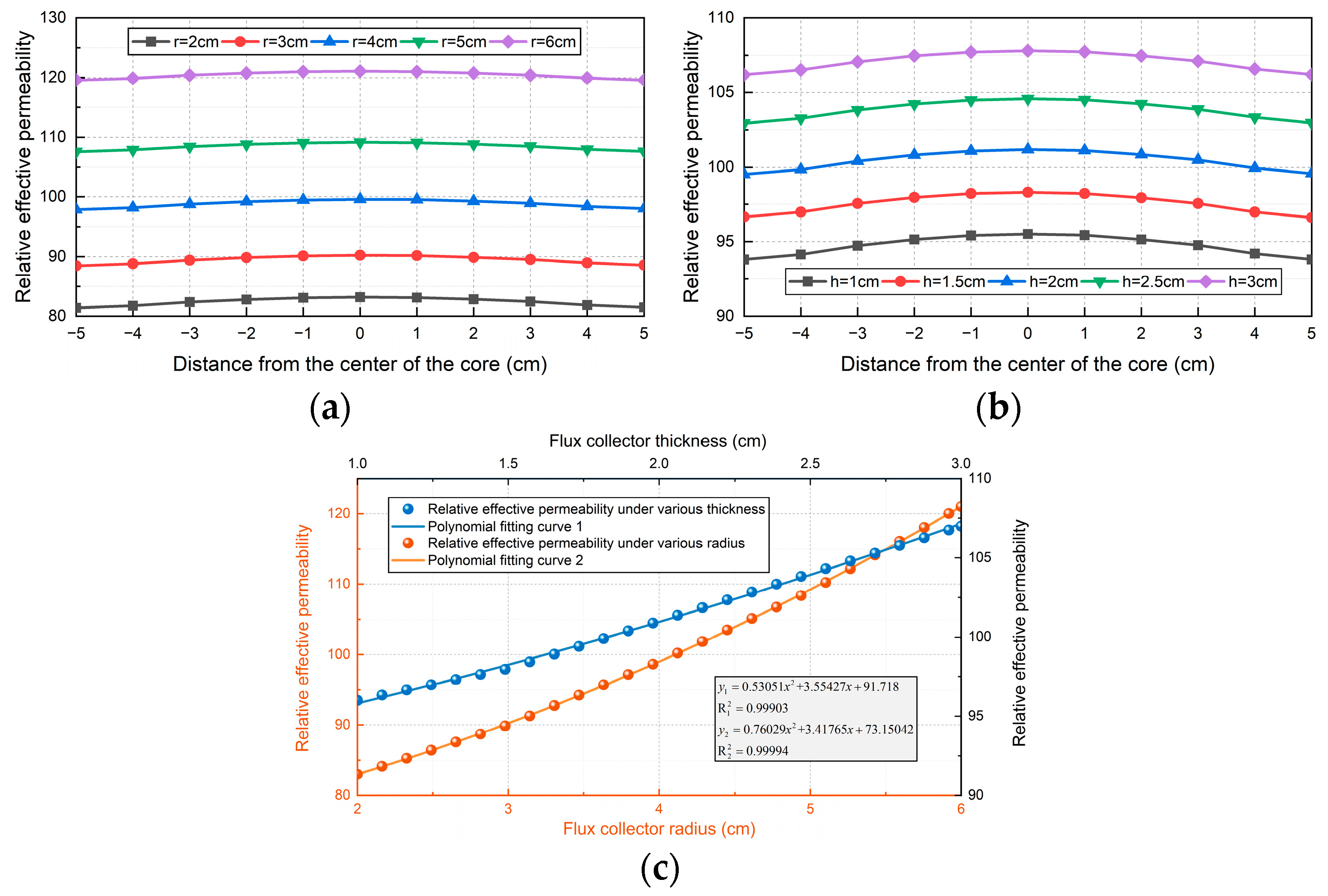
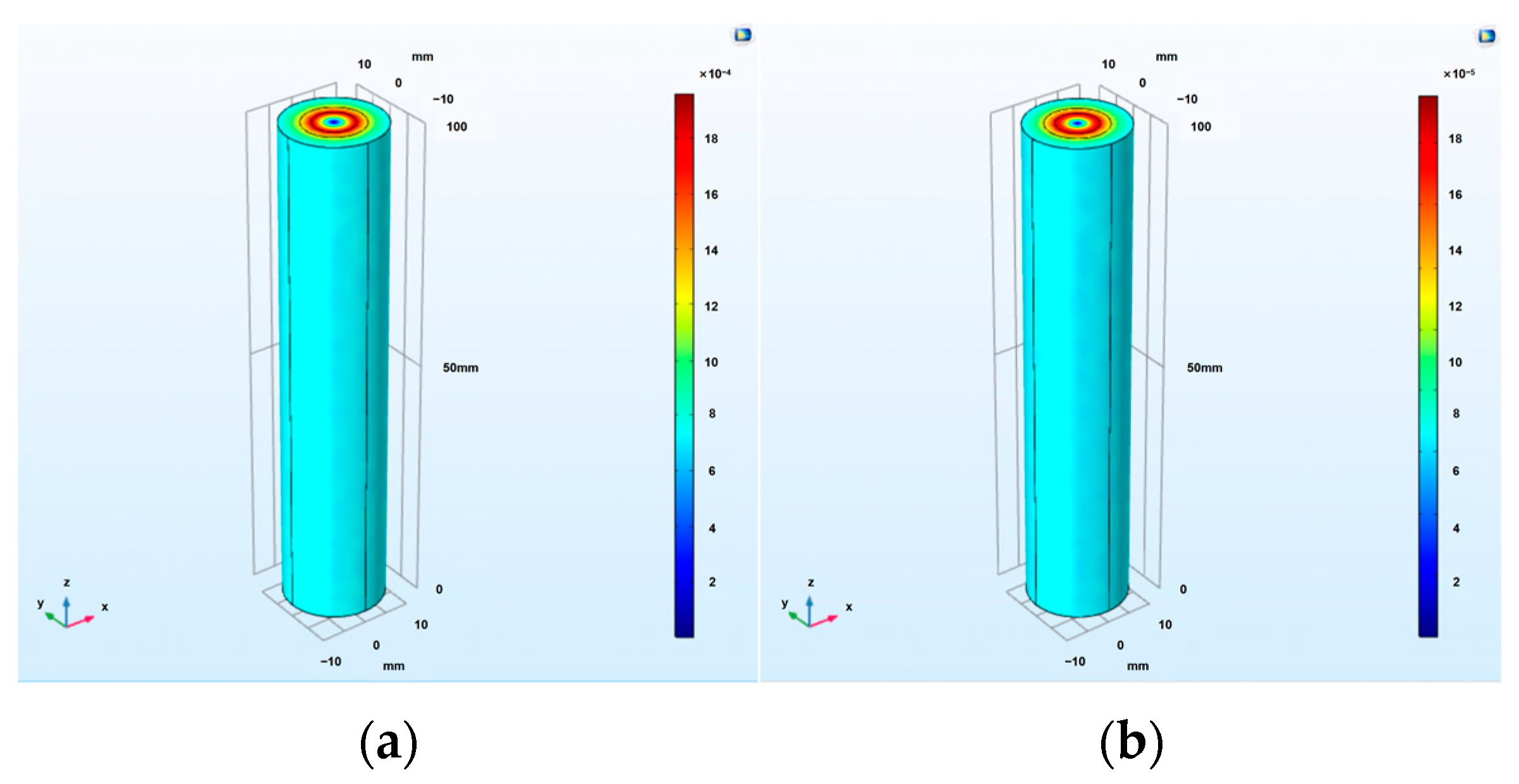
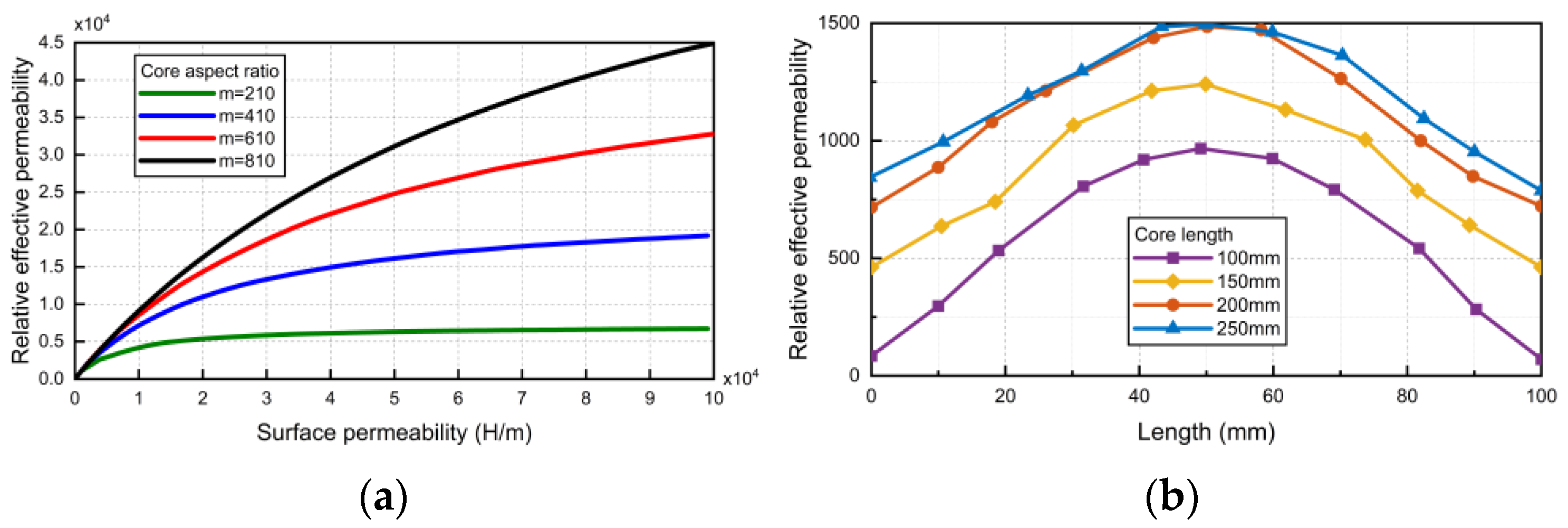
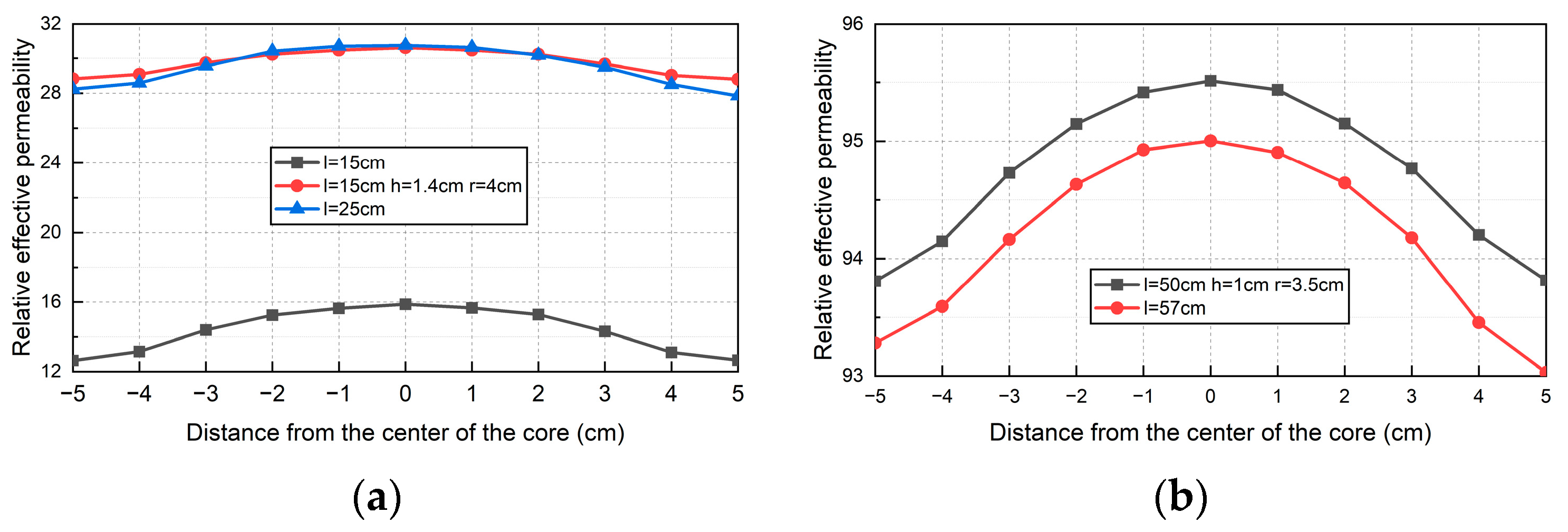
- When the radius r of the flux collector is constant and the thickness h is different, the relative effective permeability of the core axis is shown in Figure 9a. With the increase of the thickness of the flux collector, the relative effective permeability of the core will increase. As shown in Figure 9d, the relative effective permeability of the core increases with the increase of the thickness of the trap;
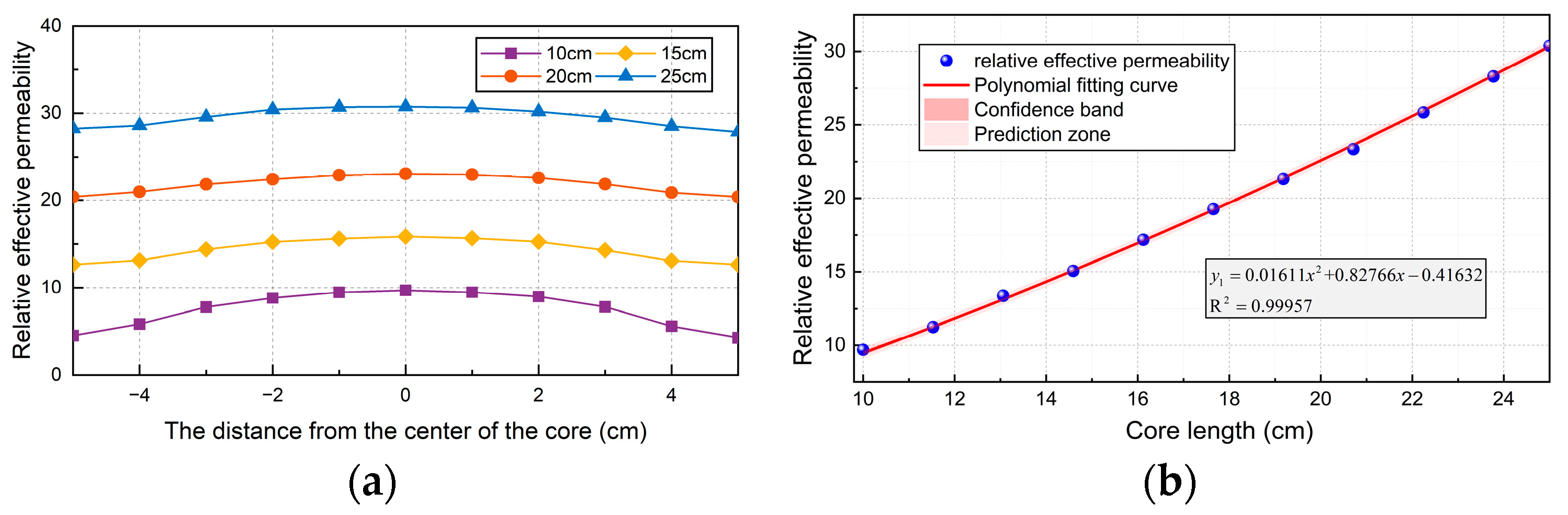
- When the thickness h of the flux collector is a certain value and the radius r is different, the relative effective permeability distribution is shown in Figure 9b. We can see that, when r increases at equal intervals, the rate of increase of the relative effective permeability will gradually increase. The fitting curve is shown in Figure 9c; the relative effective permeability increases in a parabola with the increase of the radius of the collector.
4. Design of Induction Coil
4.1. Resistance, Inductance, and Capacitance of Induction Coil
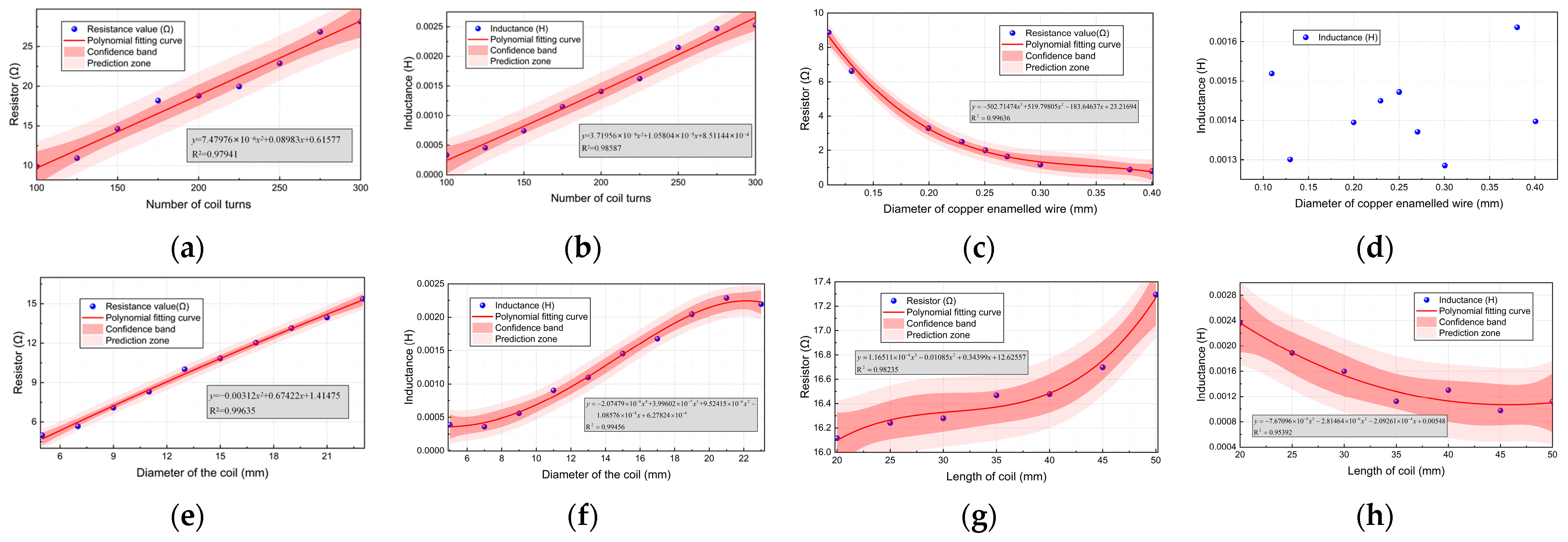
- The number of turns of the coil and the diameter of the copper enameled wire will affect the coil resistance, and the length of the coil will not affect the change of resistance. The simplified formula of coil resistance can be obtained:
- The number of turns, coil radius, and coil length will affect the coil inductance, and the diameter of the copper enameled wire will not affect the change of coil inductance. The simplified formula of coil inductance can be obtained:

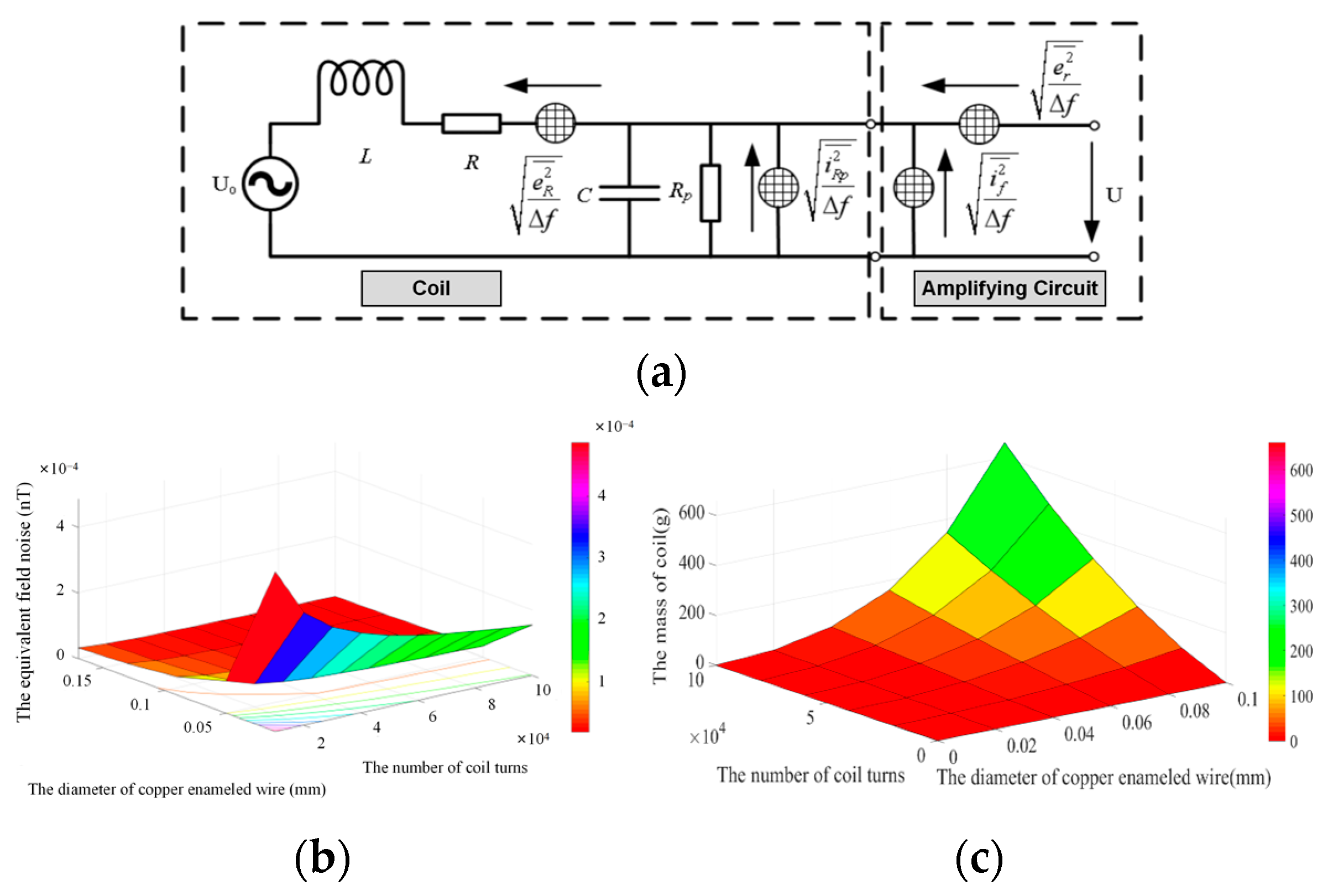
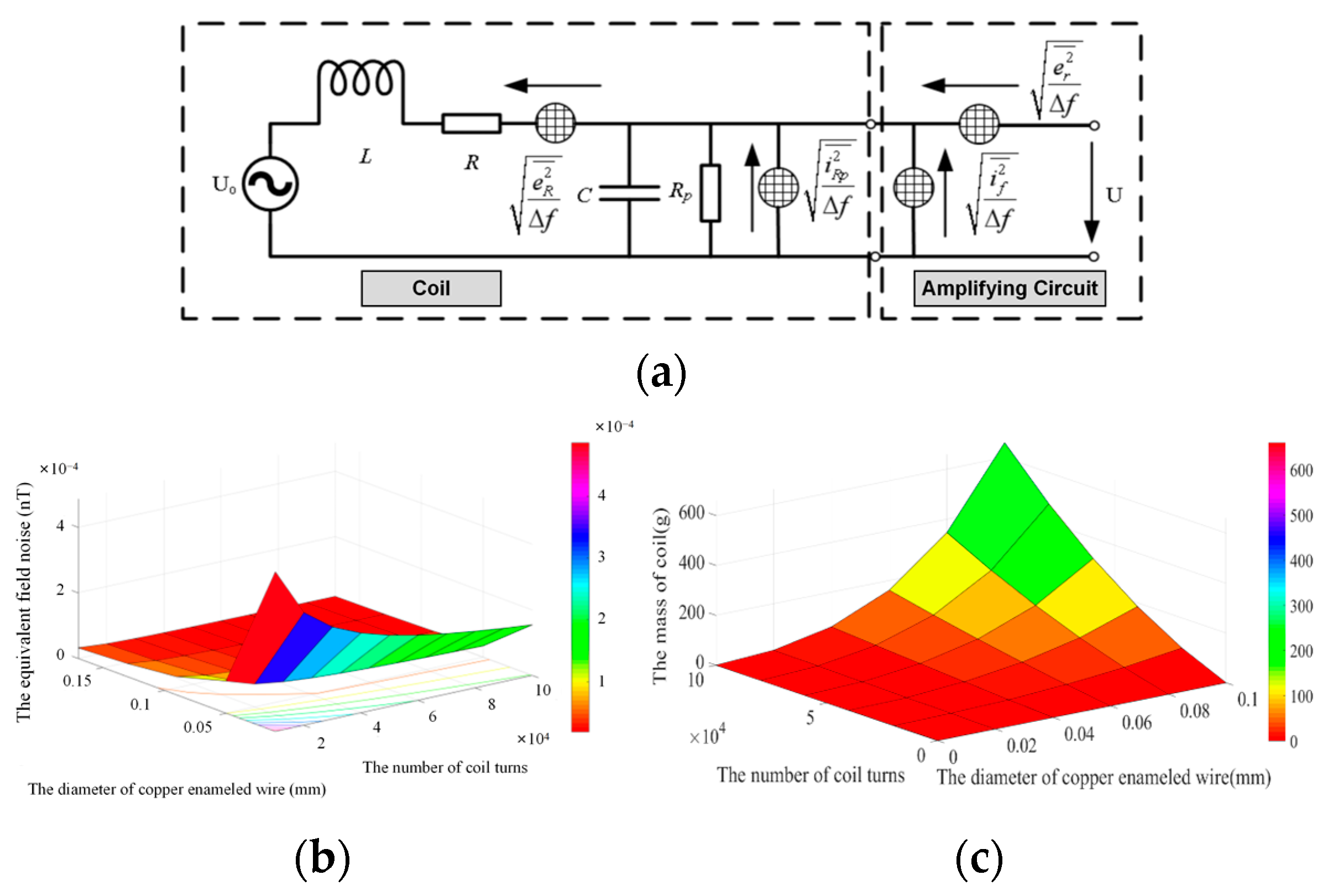
4.2. Noise Analysis of Magnetic Field Sensor
4.3. Coil Quality Analysis of Magnetic Field Sensors
4.4. Determination of Coil Parameters
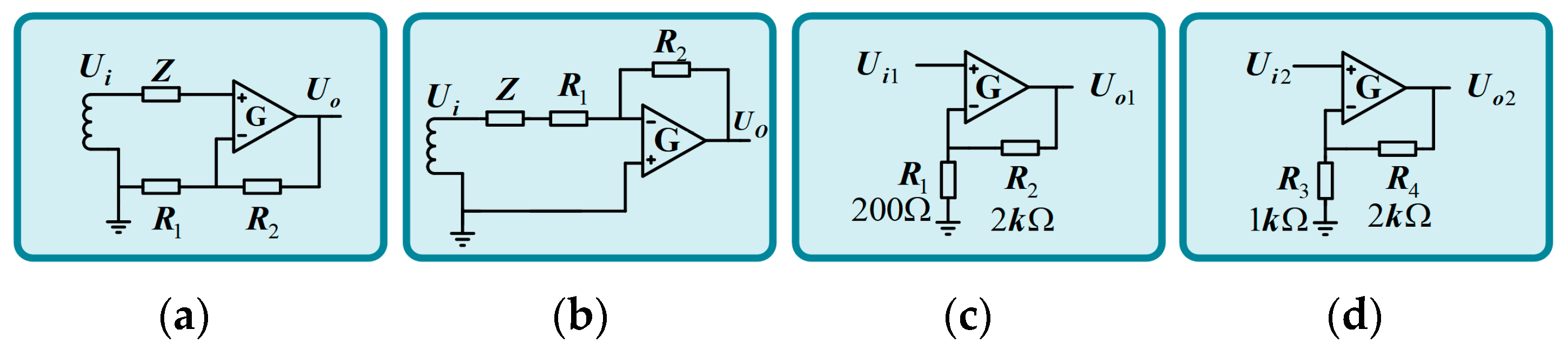
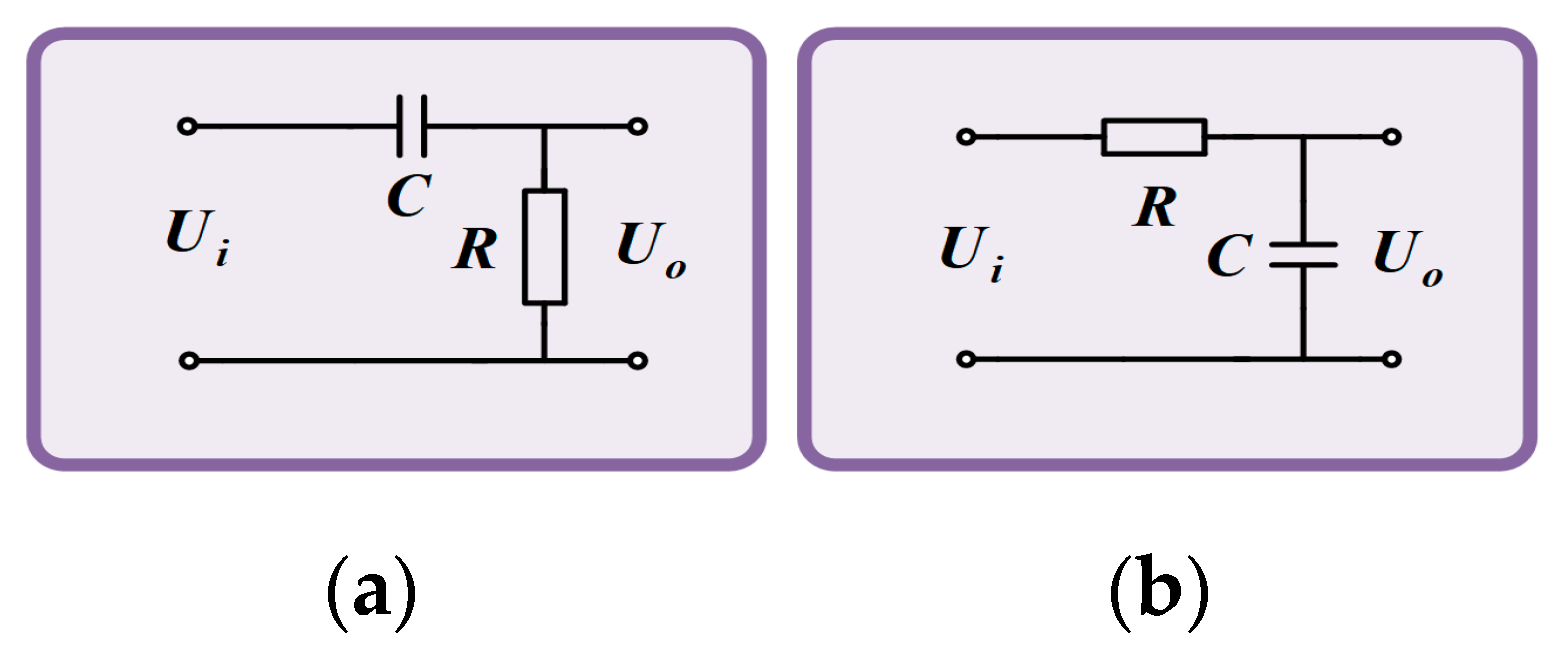
5. Design of Amplifier Circuit
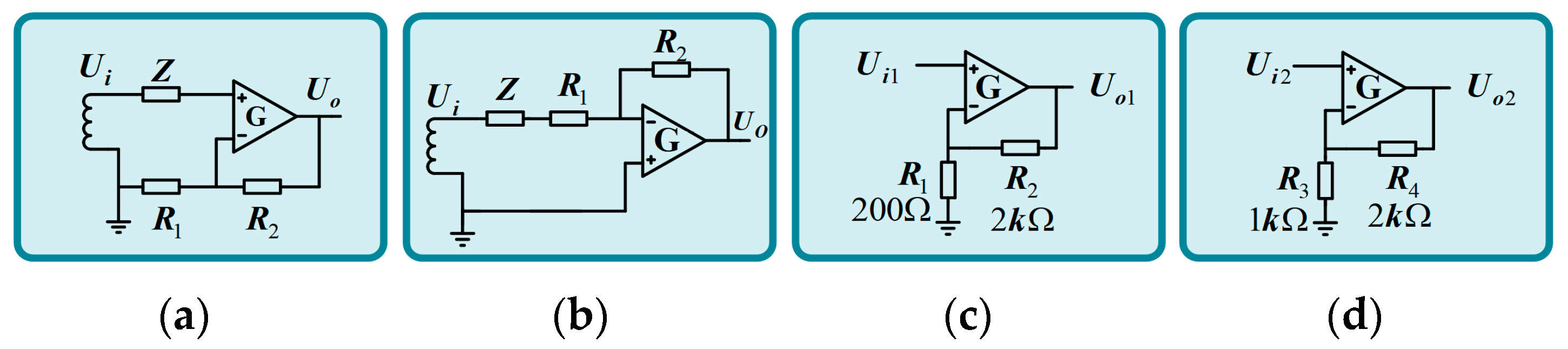
5.1. Structure Design of Amplifier Circuit
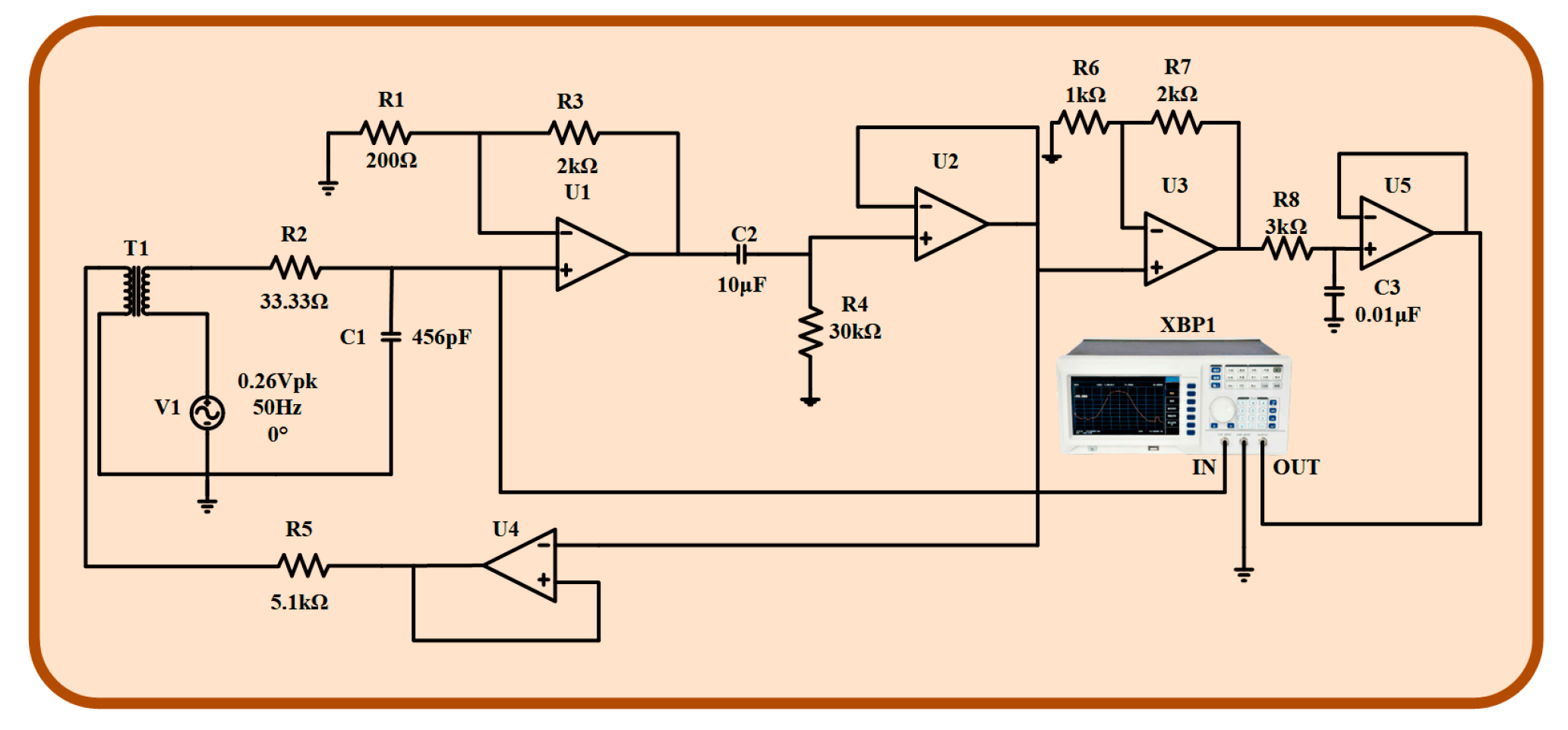
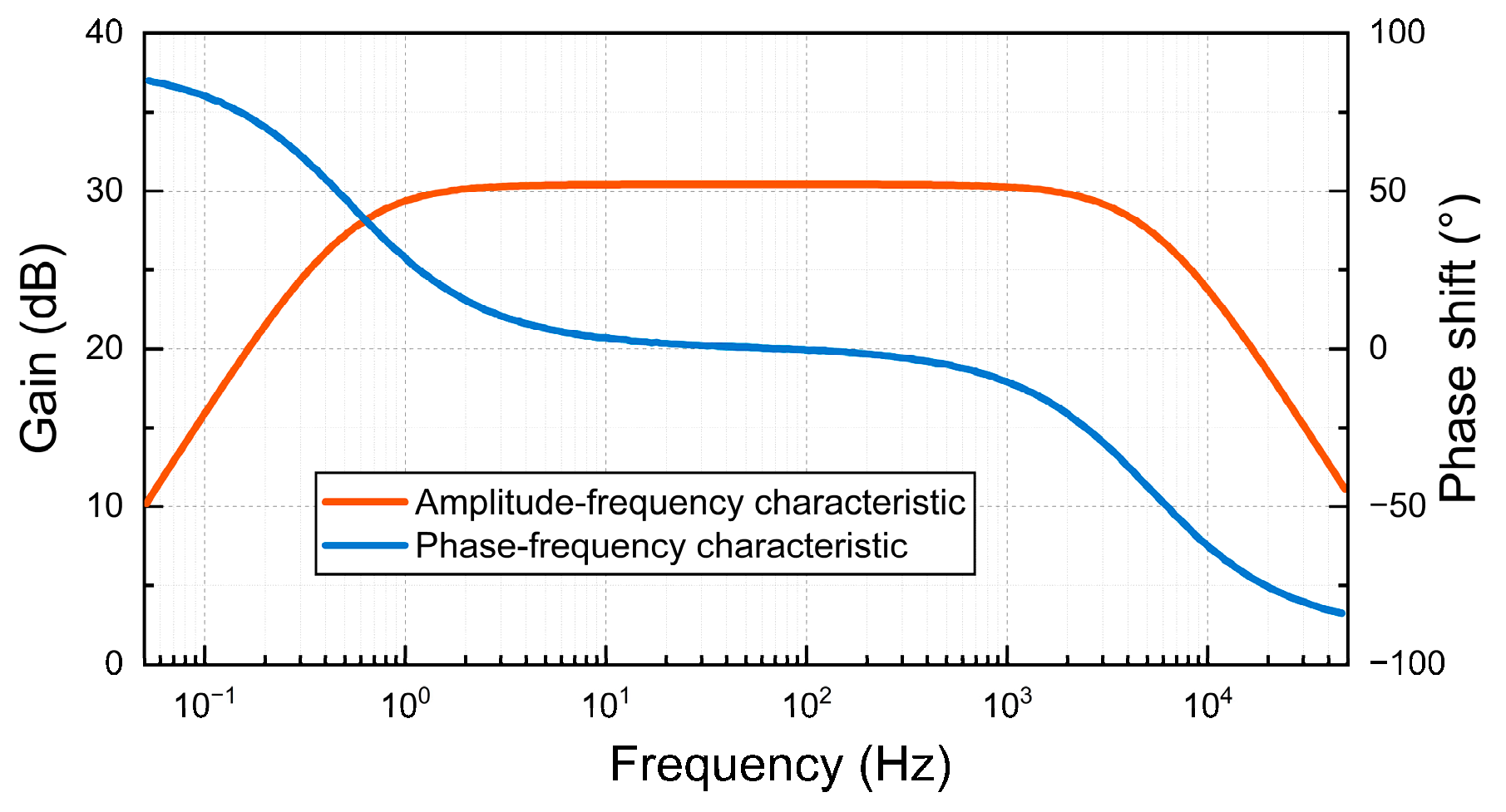
5.2. Simulation of Amplifier Circuit
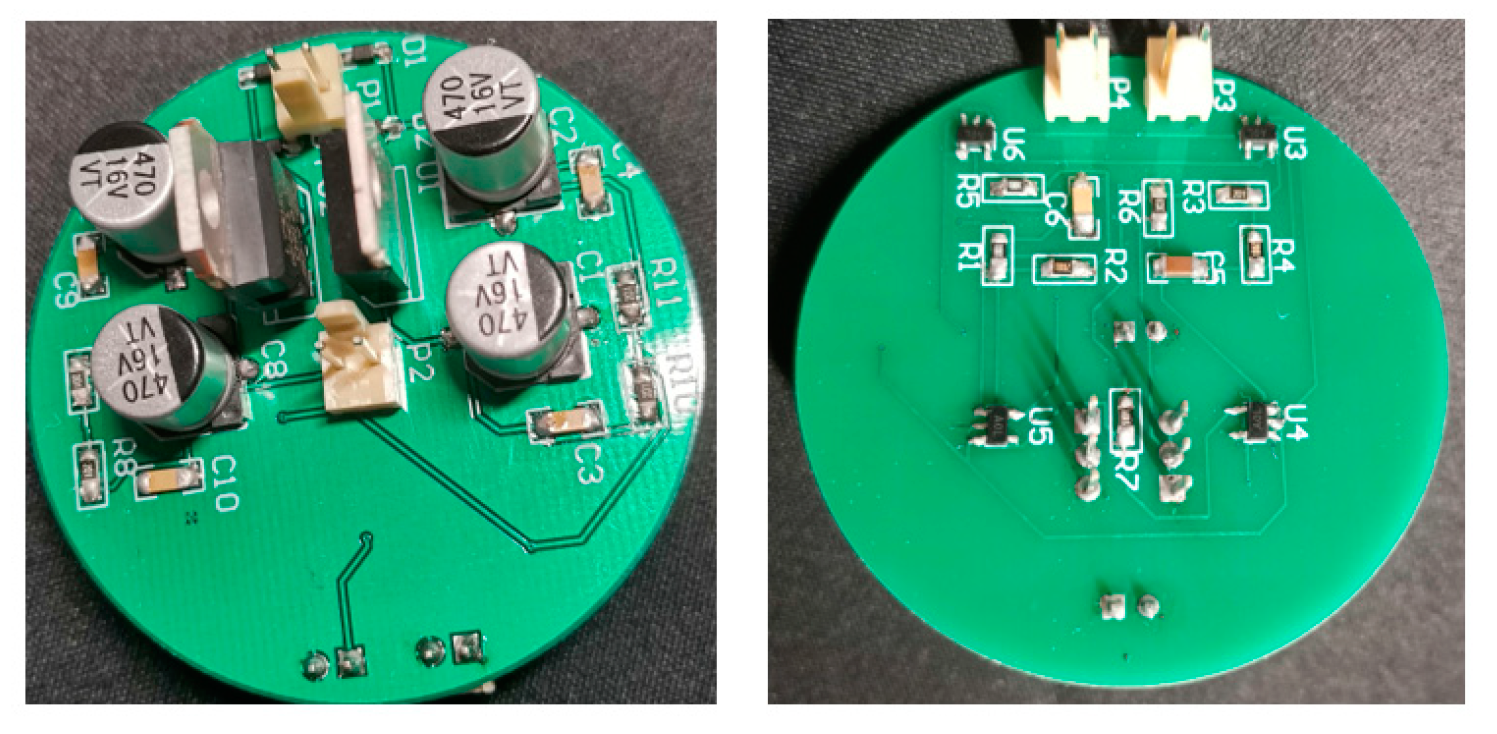
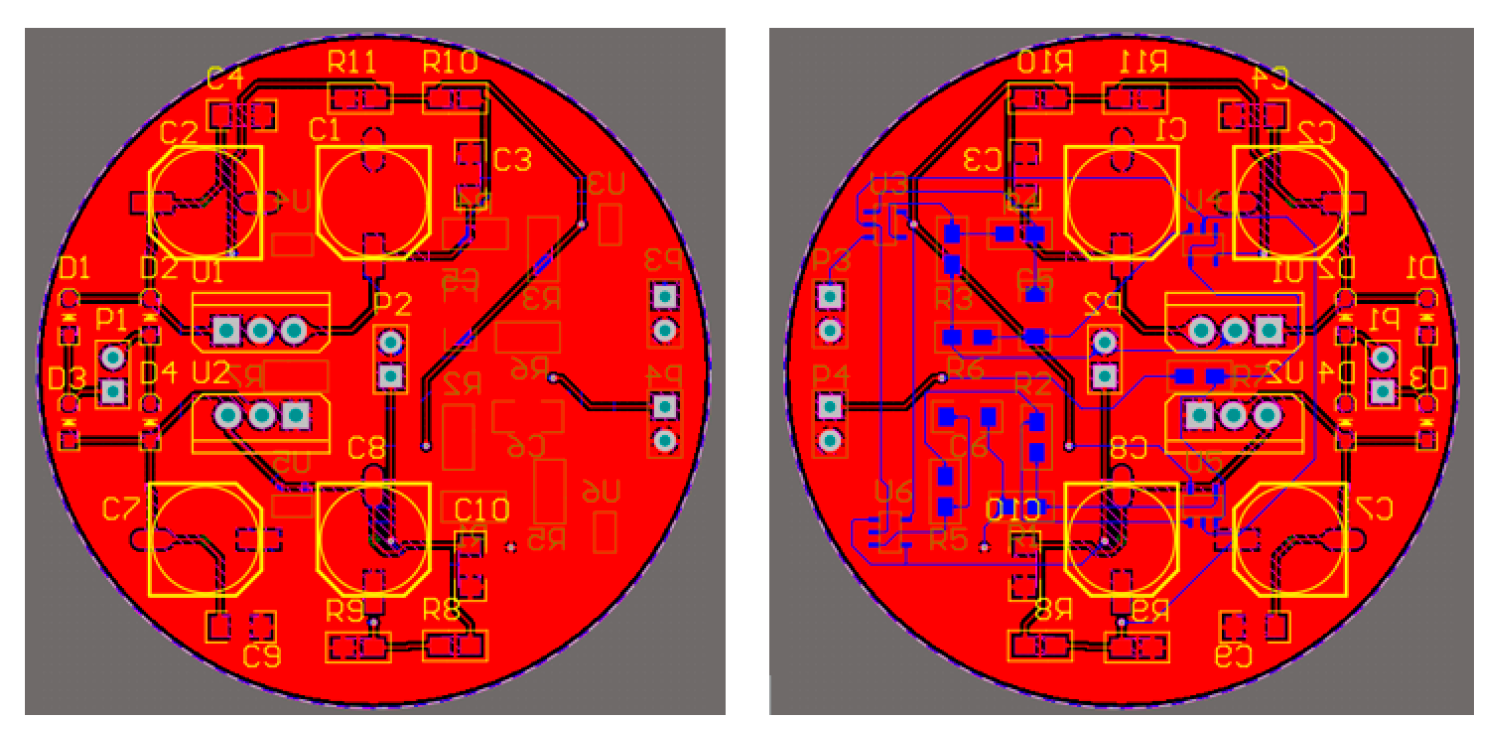
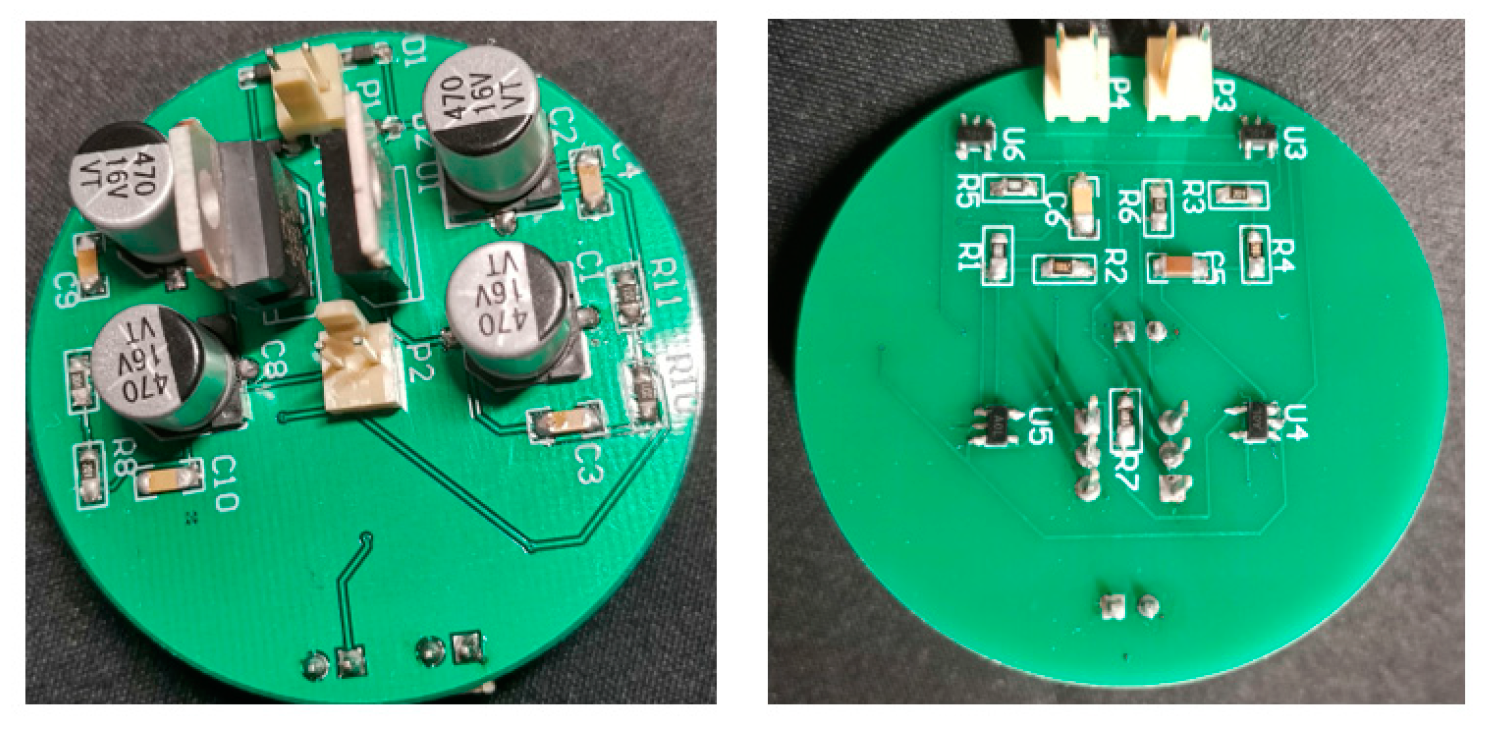
5.3. Physical Design of Amplifier Circuit
6. Experimental Results
6.1. Test of Amplifier Circuit
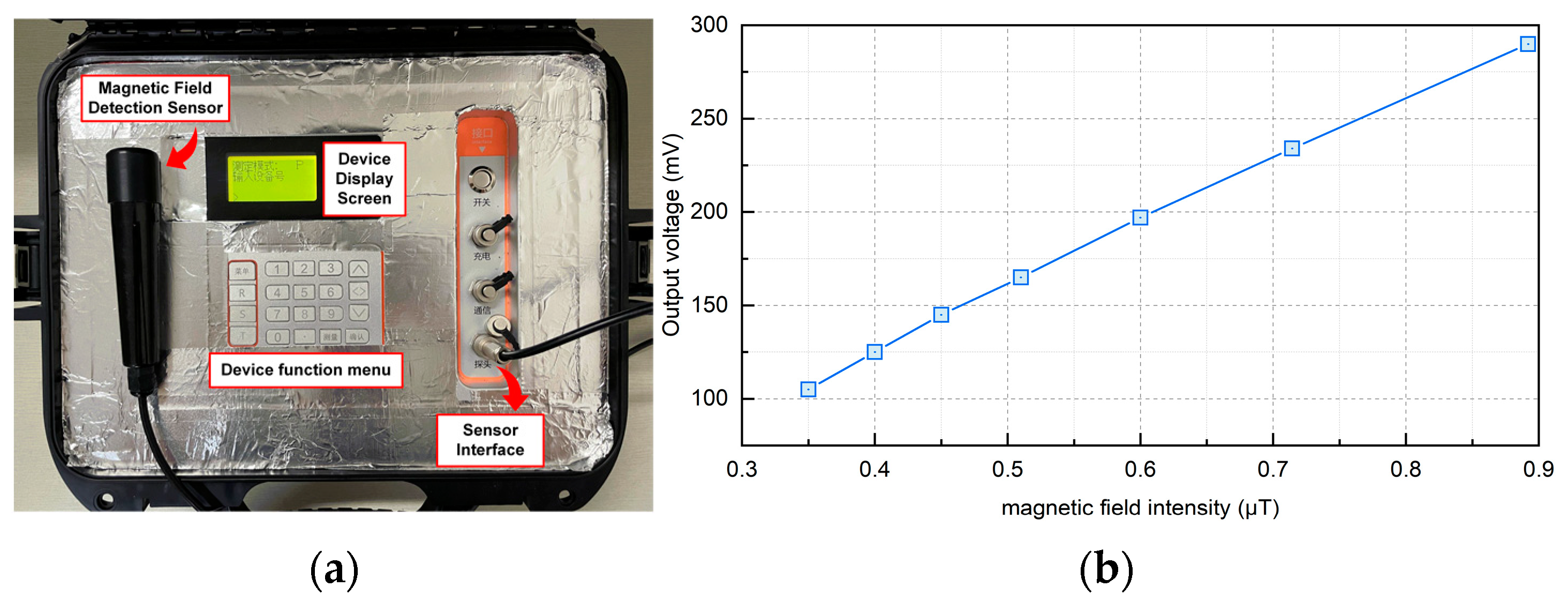
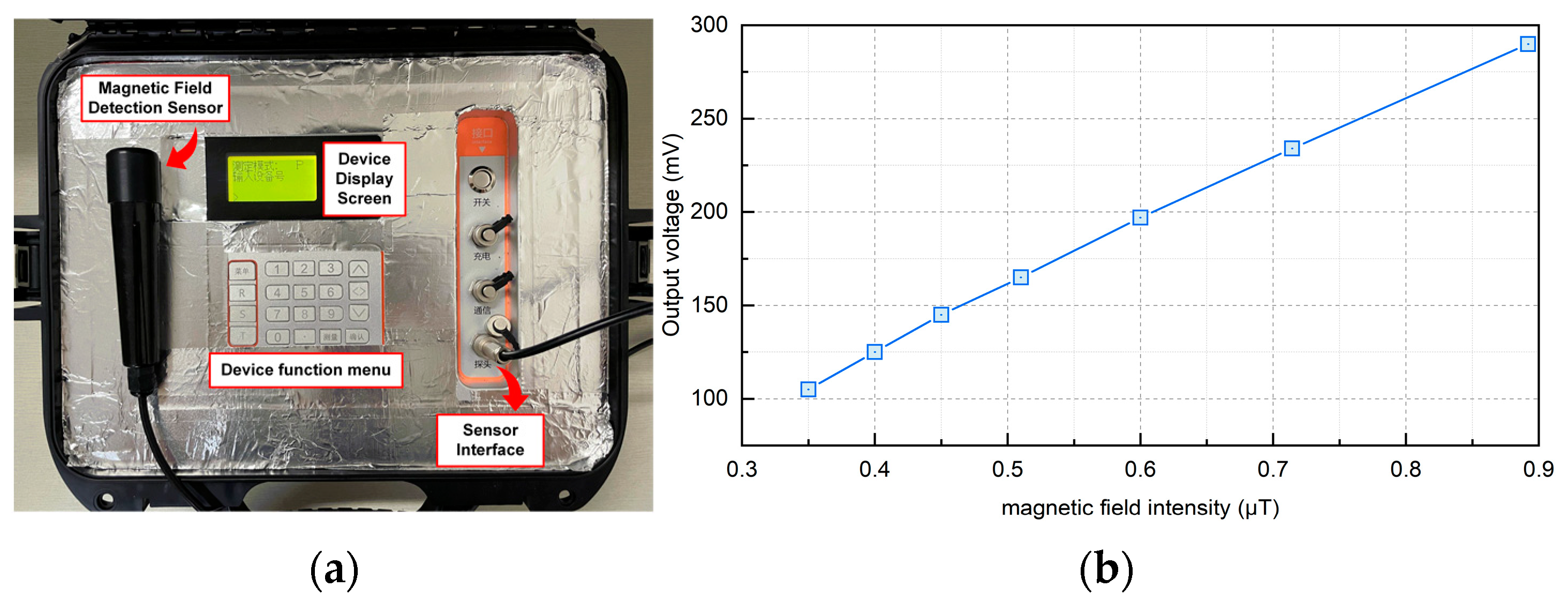
6.2. Fabrication of Sensor and Calibration of Sensitivity
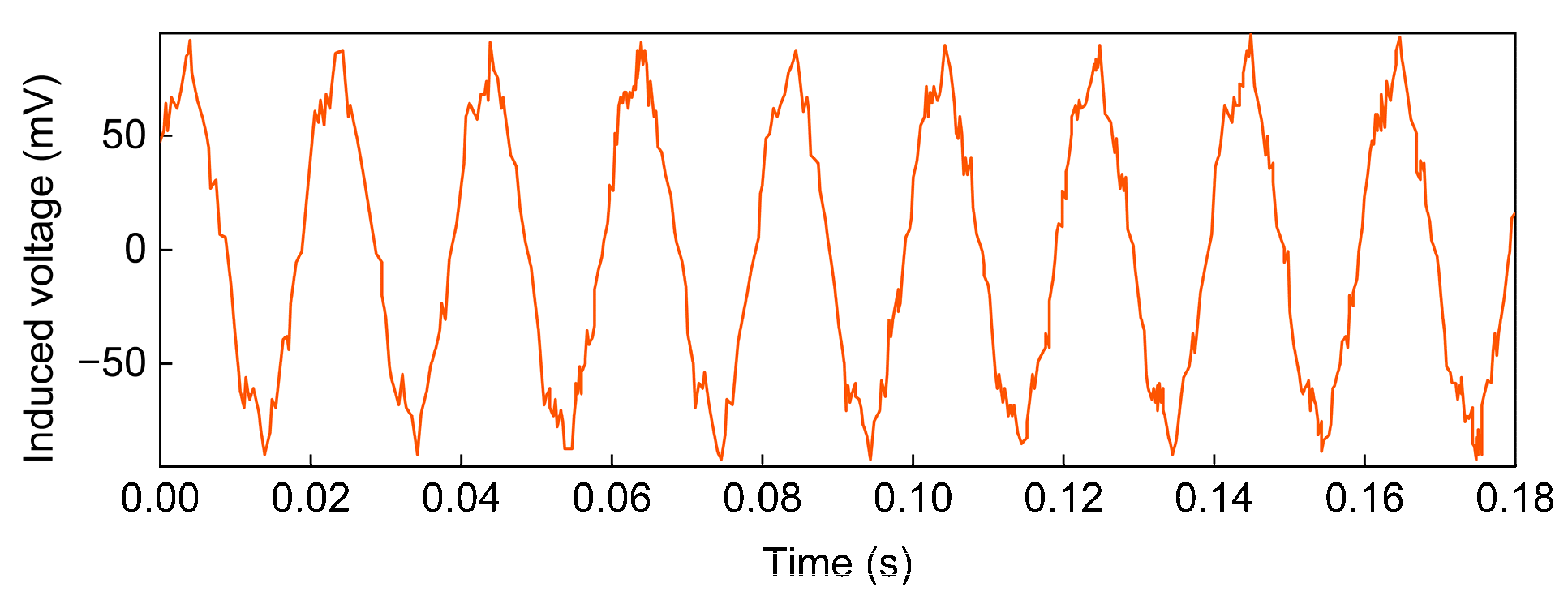
6.3. Experimental Detection
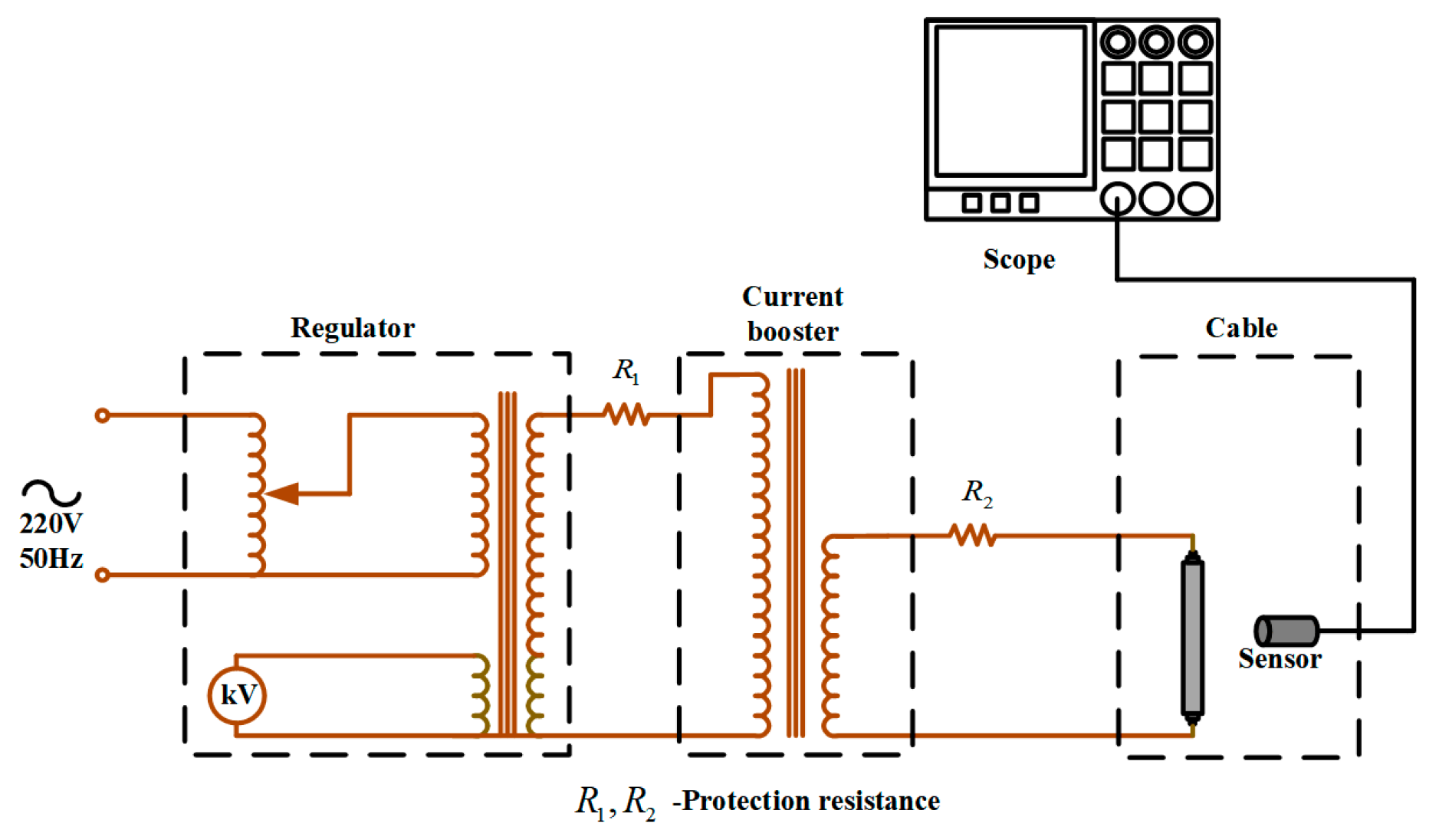
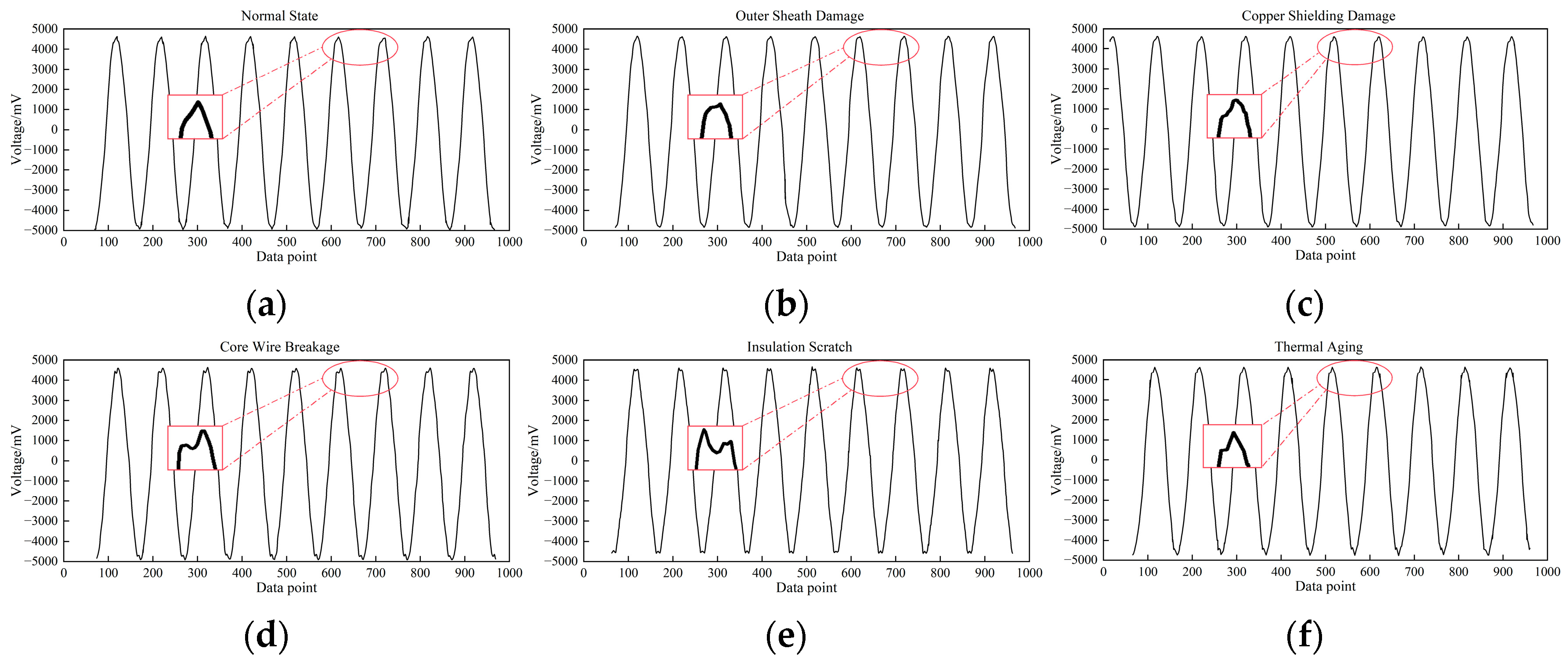
6.4. Cable Status Detection Test
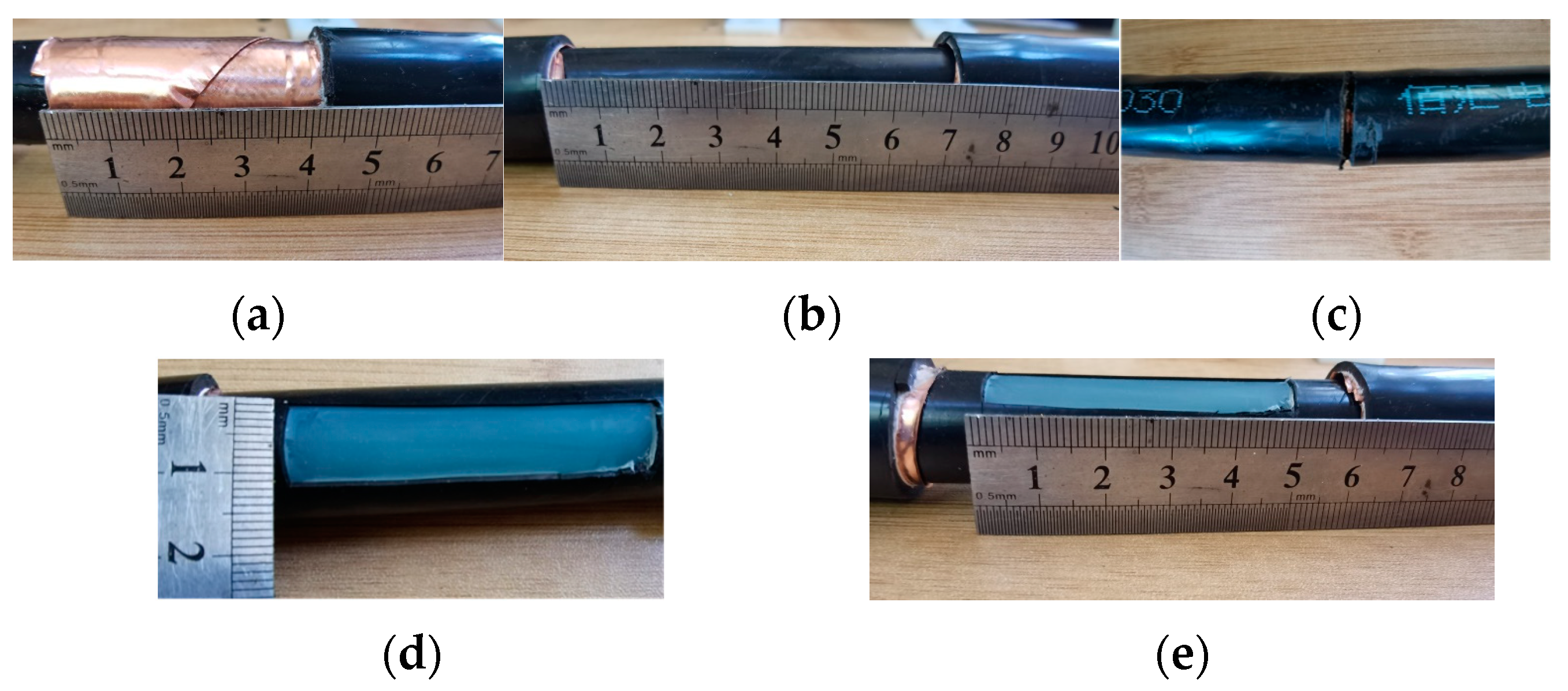
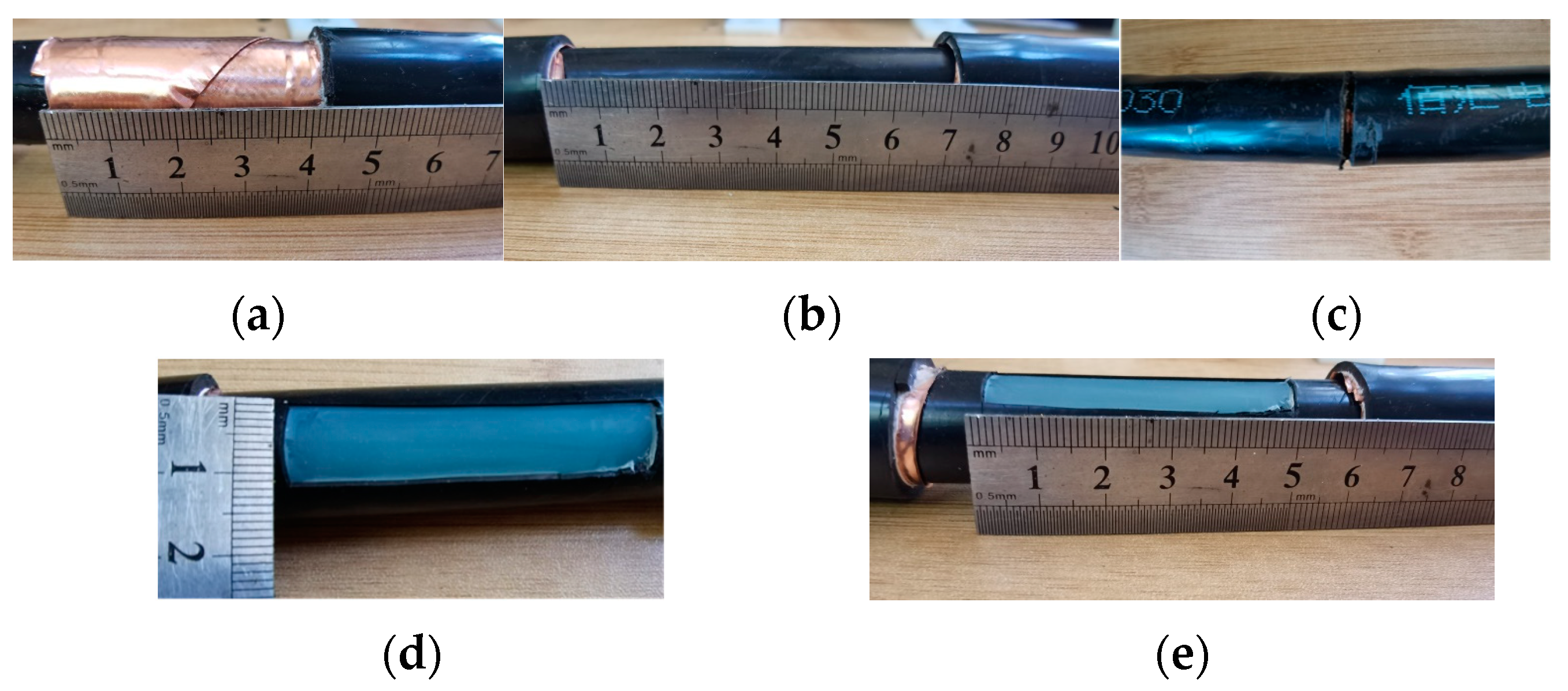
- Before starting the experiment, prepare different cable samples for connecting to the experimental circuit;
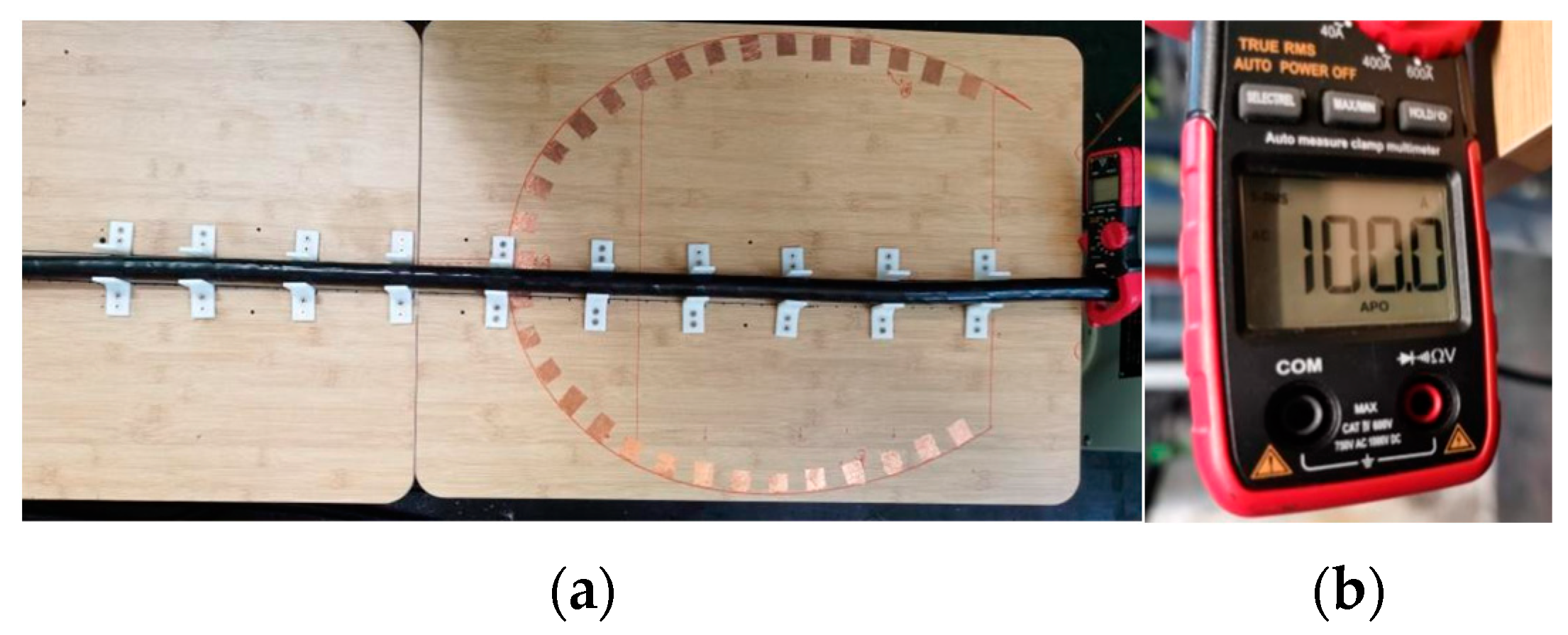
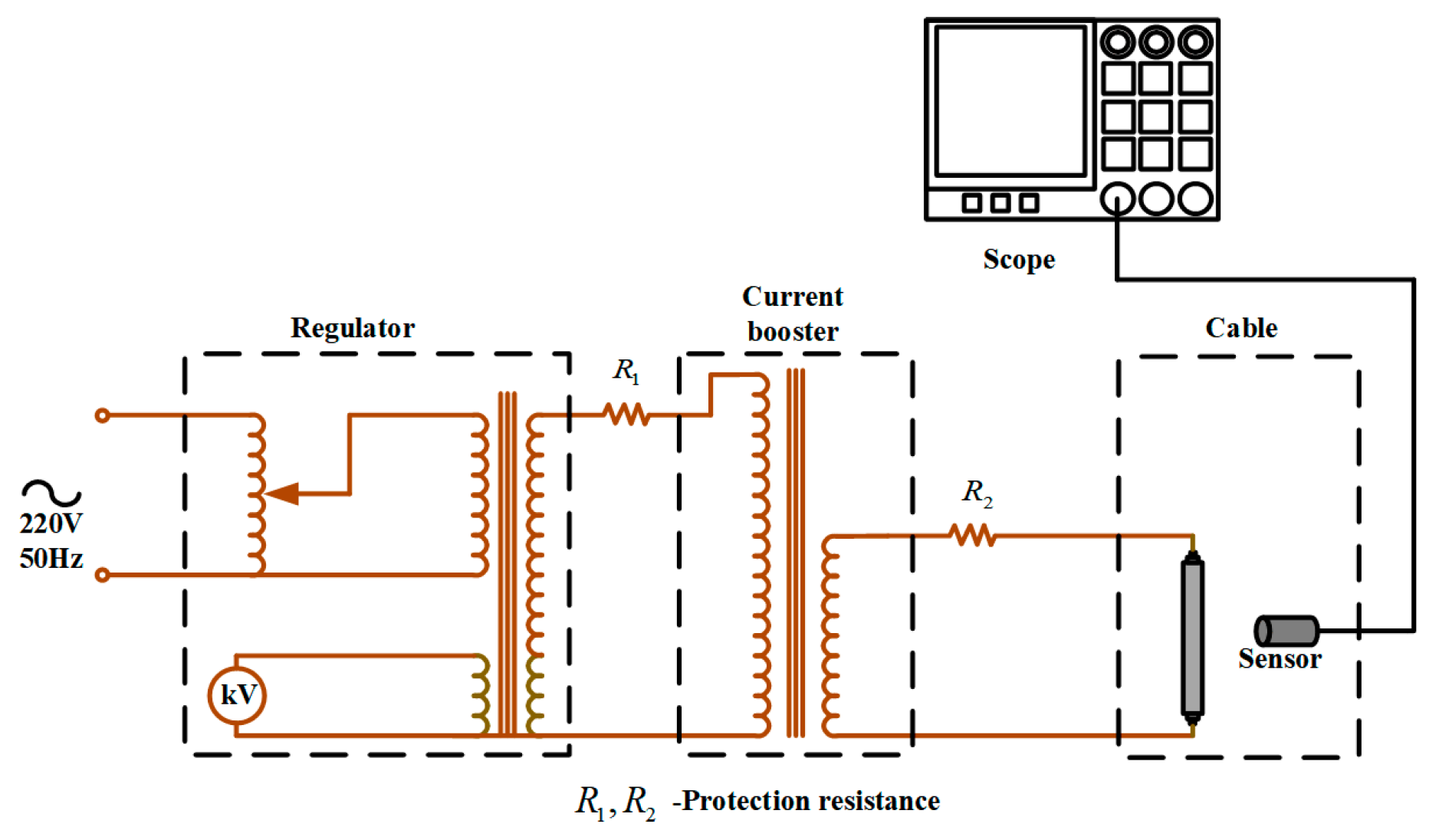
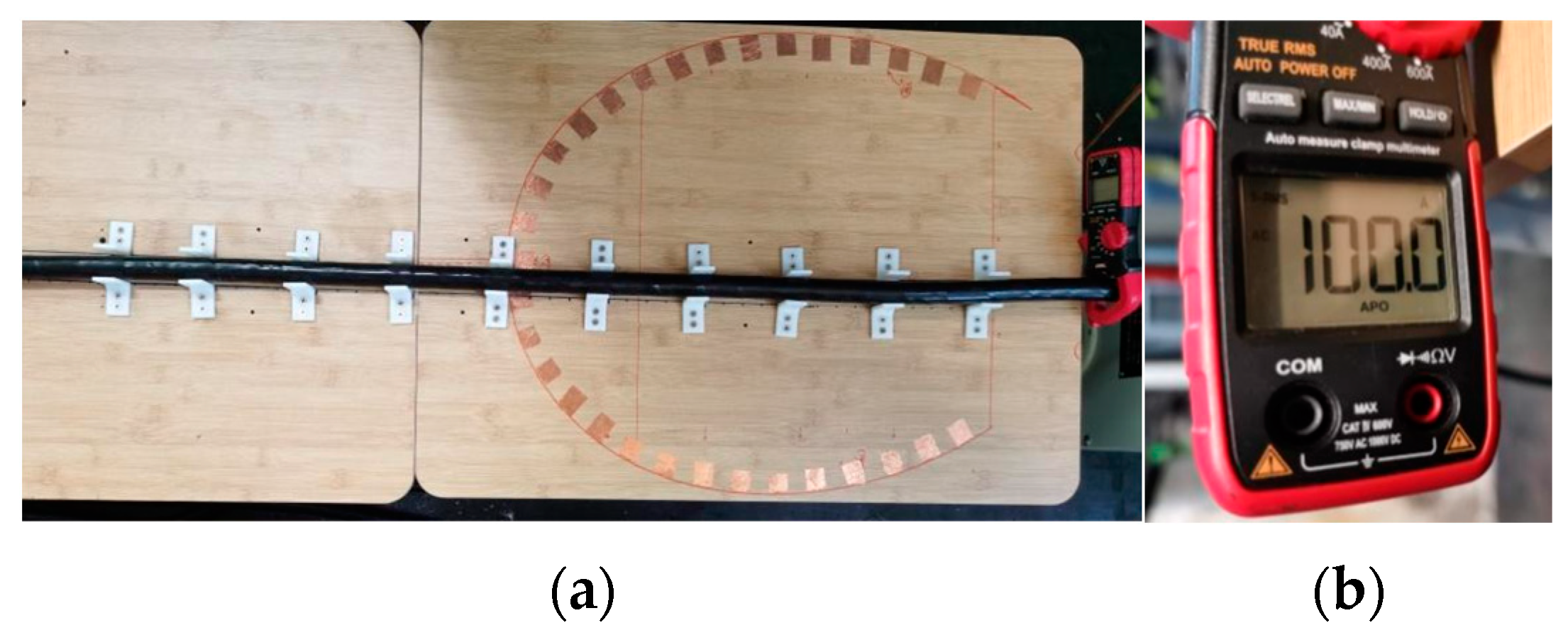
- Turn on the experimental power supply and adjust the voltage regulator to increase the core current to 100 A, as shown in Figure 22b;
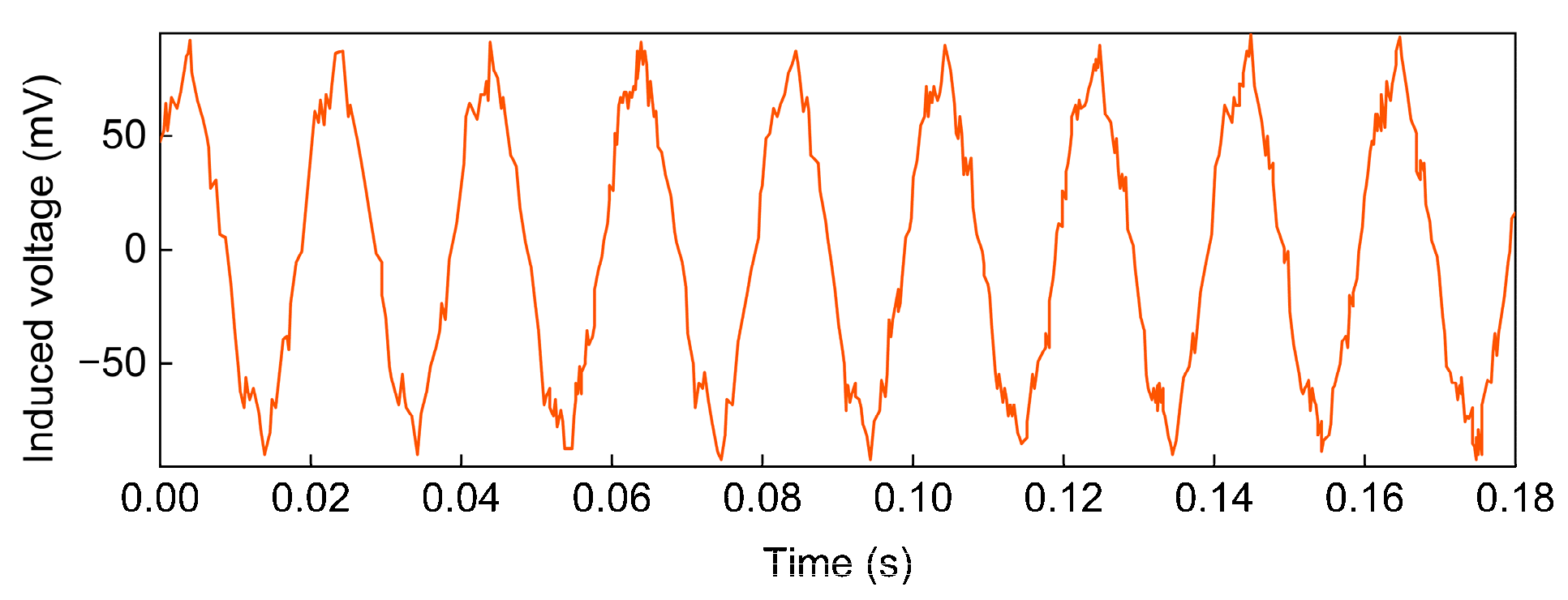
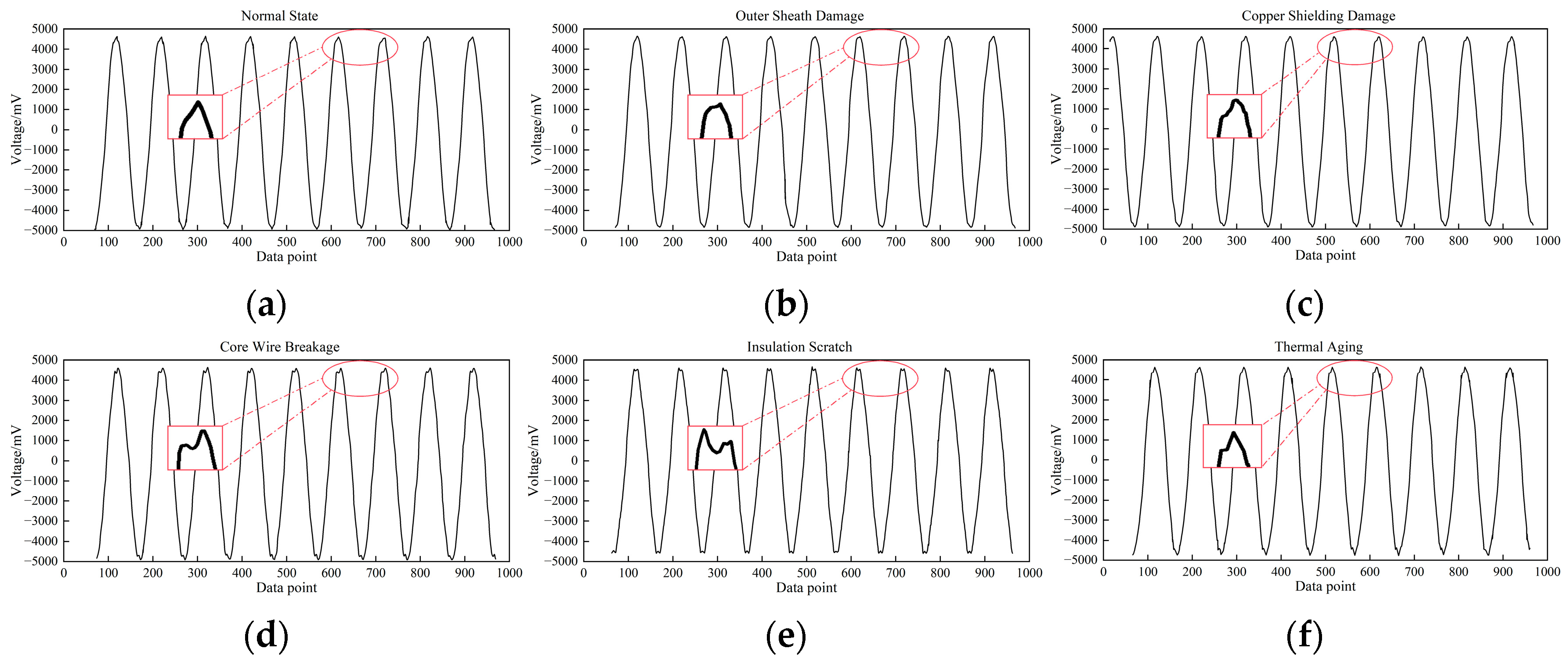
- For samples in different states, a magnetic field sensor is used to detect the magnetic field signals at the measurement points. During detection, the distance between the sensor probe and the cable is 2 mm; that is, the vertical distance between the probe and the cable surface is maintained at 2 mm. Store the waveform of the acquisition point into the status information database of the corresponding state.
7. Conclusions
- Permalloy has enough initial permeability and good ductility. The price is relatively cheaper, but it also has good thermal stability. So, permalloy is selected as the material of the magnetic core in this paper;
- The geometric parameters of the magnetic core are optimized by the simulation model, and the optimal aspect ratio of the magnetic core is determined to be 20;
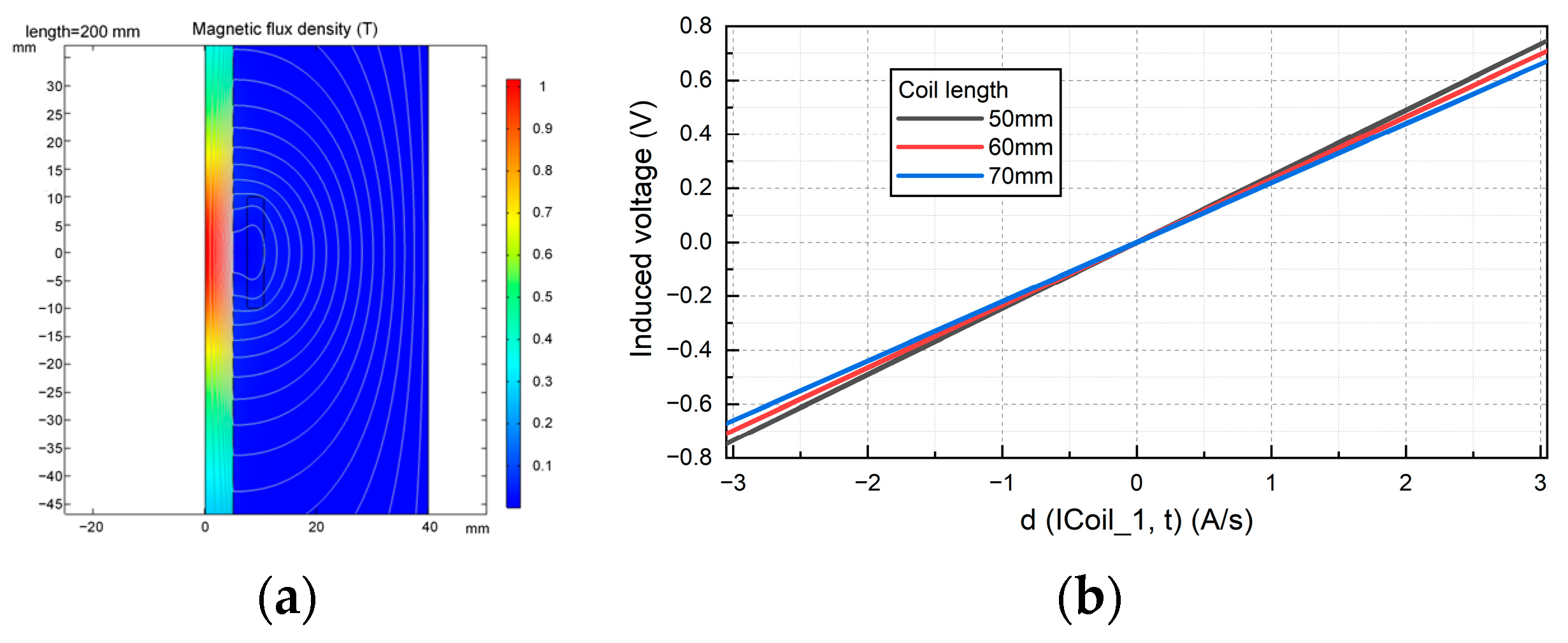
- The smaller the ratio of coil length to core length, the higher the sensitivity of the sensor. After analysis, the ratio of coil length to core length is set to 0.3;
- When the diameter of the copper enameled wire is 0.08 mm and the number of turns of the coil is 11,000, the equivalent magnetic field noise of the sensor is 0.06 pT, and the mass of the coil is only 30 g;
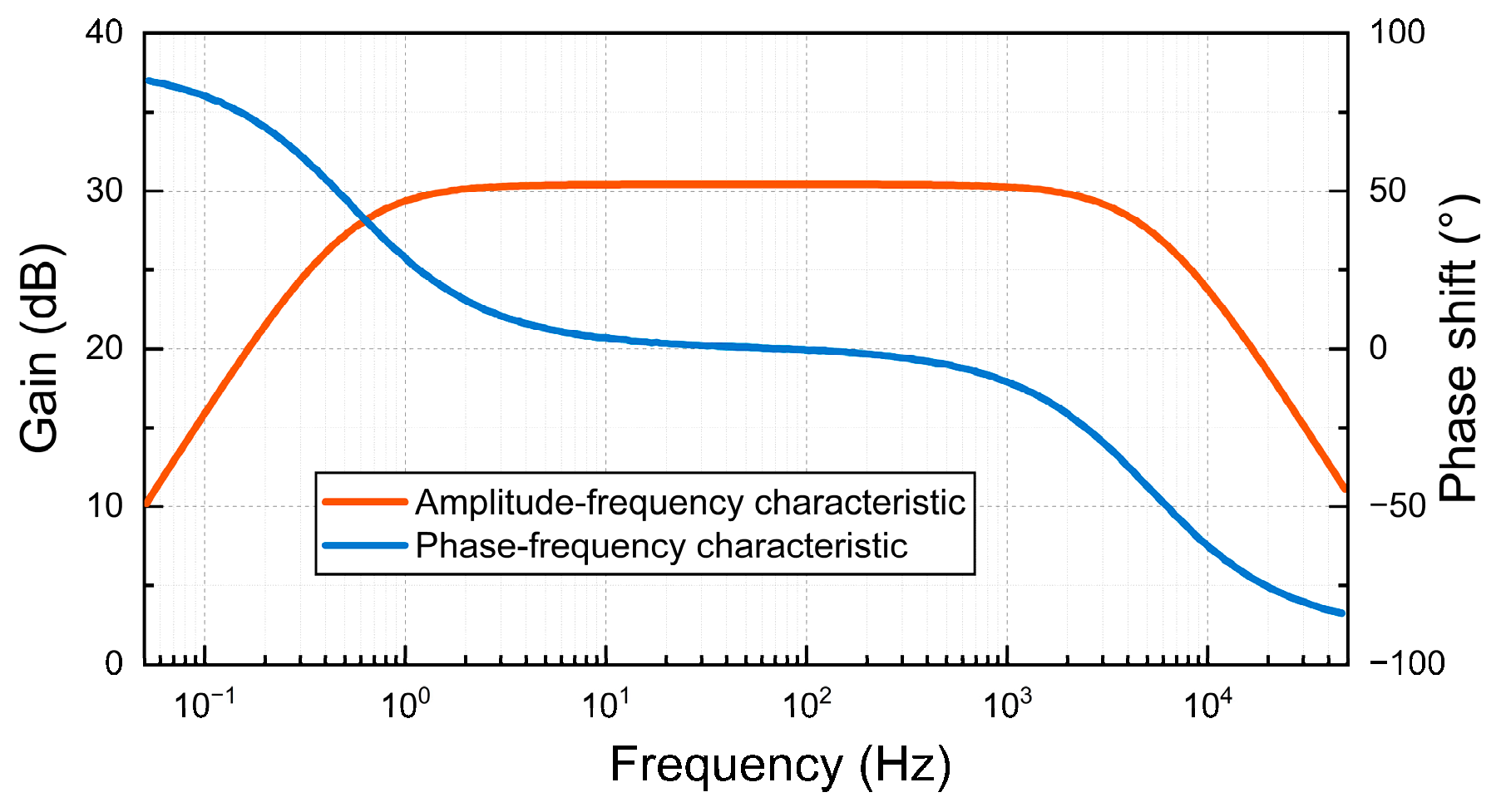
- In this paper, the magnetic flux negative feedback link is introduced into the amplifying circuit, which greatly improves the transmission characteristics of the sensor, makes the amplitude-frequency characteristic and phase-frequency characteristic curve smoother, and expands the frequency bandwidth of the magnetic field sensor. Verified by simulation and experimental tests, the amplifying circuit has high reliability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Parol, M.; Wasilewski, J.; Jakubowski, J. Assessment of Electric Shock Hazard Coming from Earth Continuity Conductors in 110 kV Cable Lines. IEEE Trans. Power Deliv. 2020, 35, 600–608. [Google Scholar] [CrossRef]
- Guo, W.; Zhou, S.L.; Wang, L.; Pei, H.; Zhang, C.; Li, H.C. Design and Application of Online Monitoring System for Electrical Cable States. High Volt. Eng. 2019, 45, 3459–3466. [Google Scholar] [CrossRef]
- Lim, H.; Kwon, G.Y.; Shin, Y.J. Fault Detection and Localization of Shielded Cable via Optimal Detection of Time-Frequency-Domain Reflectometry. IEEE Trans. Instrum. Meas. 2021, 70, 3521510. [Google Scholar] [CrossRef]
- Zhang, J.; Jiao, Y.; Chen, Q.; Zhou, L.; Li, H.B.; Tong, Y. An Online Measuring Method for Tangent Delta of Power Cables Based on an Injected Very-Low-Frequency Signal. IEEE Sens. J. 2022, 22, 980–988. [Google Scholar] [CrossRef]
- Lu, L.; Zhou, K.; Zhu, G.Y.; Chen, B.D.; Yang, X.M. Partial Discharge Signal Denoising with Recursive Continuous S-Shaped Algorithm in Cables. IEEE Trans. Dielectr. Electr. Insul. 2021, 28, 1802–1809. [Google Scholar] [CrossRef]
- Qin, W.Q.; Ma, G.M.; Wang, S.H.; Hu, J.; Guo, T.J.; Shi, R.B. Distributed Discharge Detection Based on Improved COTDR Method with Dual Frequency Pulses. IEEE Trans. Instrum. Meas. 2023, 72, 9001308. [Google Scholar] [CrossRef]
- Liu, X.H.; He, W.; Zhao, Y.; Guo, Y.; Xu, Z. Nonintrusive Current Sensing for Multicore Cables Considering Inclination With Magnetic Field Measurement. IEEE Trans. Instrum. Meas. 2021, 70, 9513314. [Google Scholar] [CrossRef]
- Shao, Z.; Wen, Y.; Xu, Z.; Bian, L.; Li, P.; Wen, G.; Li, Z.; Li, G.; Wang, Y.; Han, T.J. Cable current detection with passive RF sensing tags. IEEE Trans. Ind. Electron. 2021, 69, 930–939. [Google Scholar] [CrossRef]
- Suo, C.; Cheng, K.; Wang, L.; Zhang, W.; Liu, X.; Zhu, J.J.E. Non-Contact Measurement Method of Phase Current Based on Magnetic Field Decoupling Calculation for Three-Phase Four-Core Cable. Electronics 2023, 12, 1443. [Google Scholar] [CrossRef]
- Zhu, Q.; Geng, G.; Jiang, Q. Event-driven non-invasive multi-core cable current monitoring based on sensor array. IEEE Trans. Power Deliv. 2022, 38, 1548–1557. [Google Scholar] [CrossRef]
- Yang, H.; Li, Y.; Yan, Y.; Luo, H.; He, Z. A Magnetic Flux Collection Enhanced Arc-Shaped Core and Its Optimal Coil Turn Design Method of Free-Standing Magnetic Field Energy Harvester. IEEE Trans. Power Electron. 2023, 38, 13567–13572. [Google Scholar] [CrossRef]
- Li, J.J.; Wang, Y.Z.; Zhang, X.; Ji, C.; Shi, J.Q. Sensitivity and Resolution Enhancement of Coupled-Core Fluxgate Magnetometer by Negative Feedback. IEEE Trans. Instrum. Meas. 2019, 68, 623–631. [Google Scholar] [CrossRef]
- Bang, T.K.; Shin, K.H.; Koo, M.M.; Han, C.; Cho, H.W.; Choi, J.Y. Measurement and Torque Calculation of Magnetic Spur Gear Based on Quasi 3-D Analytical Method. IEEE Trans. Appl. Supercond. 2018, 28, 0600305. [Google Scholar] [CrossRef]
- Pan, D.H.; Li, J.; Jin, C.Y.; Liu, T.H.; Lin, S.X.; Li, L.Y. A New Calibration Method for Triaxial Fluxgate Magnetometer Based on Magnetic Shielding Room. IEEE Trans. Ind. Electron. 2020, 67, 4183–4192. [Google Scholar] [CrossRef]
- Fetisov, Y.K. Piezoinductive Effect in Piezoelectric Disk With Electrodes Due to Combination of Electromagnetic Induction and Piezoelectricity. IEEE Sens. Lett. 2023, 7, 2500204. [Google Scholar] [CrossRef]
- Jiang, J.; Wu, Z.M.; Sheng, J.; Zhang, J.W.; Song, M.; Ryu, K.; Li, Z.Y.; Hong, Z.Y.; Jin, Z.J. A New Approach to Measure Magnetic Field of High-Temperature Superconducting Coil Based on Magneto-Optical Faraday Effect. IEEE Trans. Appl. Supercond. 2021, 31, 9000105. [Google Scholar] [CrossRef]
- Tang, X.L.; Wang, X.H.; Cattley, R.; Gu, F.S.; Ball, A.D. Energy Harvesting Technologies for Achieving Self-Powered Wireless Sensor Networks in Machine Condition Monitoring: A Review. Sensors 2018, 18, 4113. [Google Scholar] [CrossRef]
- Xie, S.P.; Zhang, Y.F.; Jin, M.H.; Li, C.Y.; Meng, Q.Y. High Sensitivity and Wide Range Soft Magnetic Tactile Sensor Based on Electromagnetic Induction. IEEE Sens. J. 2021, 21, 2757–2766. [Google Scholar] [CrossRef]
- Shimizu, K.; Furuya, A.; Uehara, Y.; Fujisaki, J.; Kawano, H.; Tanaka, T.; Ataka, T.; Oshima, H. Loss Simulation by Finite-Element Magnetic Field Analysis Considering Dielectric Effect and Magnetic Hysteresis in EI-Shaped Mn-Zn Ferrite Core. IEEE Trans. Magn. 2018, 54, 7402705. [Google Scholar] [CrossRef]
- Yabu, N.; Sugimura, K.; Sonehara, M.; Sato, T. Fabrication and Evaluation of Composite Magnetic Core Using Iron-Based Amorphous Alloy Powder With Different Particle Size Distributions. IEEE Trans. Magn. 2018, 54, 2801605. [Google Scholar] [CrossRef]
- Ohta, M.; Hasegawa, R. Soft Magnetic Properties of Magnetic Cores Assembled with a High Fe-Based Nanocrystalline Alloy. IEEE Trans. Magn. 2017, 53, 1–5. [Google Scholar] [CrossRef]
- He, W.; Zhang, J.T.; Qu, C.W.; Wu, J.; Peng, J.C. A Passive Electric Current Sensor Based on Ferromagnetic Invariant Elastic Alloy, Piezoelectric Ceramic, and Permalloy Yoke. IEEE Trans. Magn. 2016, 52, 4001504. [Google Scholar] [CrossRef]
- Mimura, M.; Takahashi, N.; Nakano, M.; Ujigawa, S.; Shinnoh, T.; Miyagi, D. Examination of Precise Measurement of DC Magnetic Properties of Permalloy Under Low Flux Density More Than a Few mT. IEEE Trans. Magn. 2012, 48, 3614–3617. [Google Scholar] [CrossRef]
- Yang, R.P.; Wang, H.P.; Liu, H.; Luo, W.; Ge, J.; Dong, H.B. A new digital single-axis fluxgate magnetometer according to the cobalt-based amorphous effects. Rev. Sci. Instrum. 2022, 93, 035104. [Google Scholar] [CrossRef]
- Huang, X.W.; Liu, Y.; Li, Q.R. Optimal design of magnetic field sensor for condition monitoring of high voltage power cable. In Proceedings of the International Conference on Electrical Materials and Power Equipment (ICEMPE), Chongqing, China, 11–15 April 2021. [Google Scholar]
- Song, J.L.; Cao, R.Q.; Jin, F.; Dong, K.F.; Mo, W.Q.; Hui, Y.J. Design and Optimization of Miniaturized Single Frequency Point Inductive Magnetic Sensor. In Proceedings of the 2021 13th International Conference on Communication Software and Networks (ICCSN), Chongqing, China, 4–7 June 2021; pp. 247–254. [Google Scholar]
- Ying, Y.; Xu, K.; Sun, L.L.; Zhang, R.; Guo, X.F.; Si, G.Y. D-Shaped Fiber Magnetic-Field Sensor Based on Fine-Tuning Magnetic Fluid Grating Period. IEEE Trans. Electron Devices 2017, 64, 1735–1741. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Principle of Measurement | Example | Range of Measurement (T) | Application |
|---|---|---|---|
| Magnetic torque | Geomagnetic variometer | 10−11~10−7 | Earth’s magnetic field |
| Fluxgate | Peak detector | 10−9~10−1 | Weak magnetic field |
| Electromagnetic induction | Fixed coil | 10−10~10−1 | Alternating magnetic field |
| Electromagnetic effect | Hall transducer | 10−7~10 | Pulsed magnetic field |
| Magneto-optical effect | Faraday magneto-optical effect | 10−2~10 | The laser device |
| Materials | Bs/T | μi | μm | ρ/μΩ × cm | Applicable Frequency Range |
|---|---|---|---|---|---|
| Mn-Zn ferrite | 0.38 | 3000 | 12,000 | 1–10 | Tens of MHz |
| Permalloy | 0.74 | 50,000 | 150,000 | 55 | <20 kHz |
| Iron-based amorphous alloy | 1.56 | 50,000 | 200,000 | 130 | 50 Hz–10 kHz |
| Nanocrystalline iron-based alloy | 1.45 | 100,000 | 800,000 | 115 | <500 kHz |
| Typical Frequency | Primary Amplification | Secondary Amplification |
|---|---|---|
| 10 Hz |  | |
| 50 Hz |  | |
| 500 Hz | 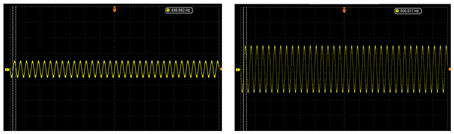 | |
| 1000 Hz |  | |
| Sample | Treatment Method |
|---|---|
| #1 | Without any treatment, as a control sample. |
| #2 | Make a damaged outer sheath in the middle of the cable and peel off the outer sheath 4 cm. |
| #3 | Make a damage defect in the metal sheath in the middle of the cable, and peel off the metal sheath 7 cm. |
| #4 | Make a broken core strand in the middle of the cable and use an electric saw to cut the sample until the core is partially broken. |
| #5 | Create scratch defects in the insulation layer in the middle of the cable. |
| #6 | Thermal aging treatment is to place the sample in a constant temperature aging box to thermally age the sample. The aging temperature is 90 °C and the aging time is 70 days. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Xin, Y.; Huang, Y.; Du, B.; Huang, X.; Su, J. Optimal Design and Development of Magnetic Field Detection Sensor for AC Power Cable. Sensors 2024, 24, 2528. https://doi.org/10.3390/s24082528
Liu Y, Xin Y, Huang Y, Du B, Huang X, Su J. Optimal Design and Development of Magnetic Field Detection Sensor for AC Power Cable. Sensors. 2024; 24(8):2528. https://doi.org/10.3390/s24082528
Chicago/Turabian StyleLiu, Yong, Yuepeng Xin, Youcong Huang, Boxue Du, Xingwang Huang, and Jingang Su. 2024. "Optimal Design and Development of Magnetic Field Detection Sensor for AC Power Cable" Sensors 24, no. 8: 2528. https://doi.org/10.3390/s24082528
APA StyleLiu, Y., Xin, Y., Huang, Y., Du, B., Huang, X., & Su, J. (2024). Optimal Design and Development of Magnetic Field Detection Sensor for AC Power Cable. Sensors, 24(8), 2528. https://doi.org/10.3390/s24082528