
Sensor Head Temperature Distribution Reconstruction of High-Precision Gravitational Reference Sensors with Machine Learning


Abstract
1. Introduction
- The algorithm’s dynamism allows it to reconstruct temperature at any point on the EH surface using temperature sensor data with variable weights.
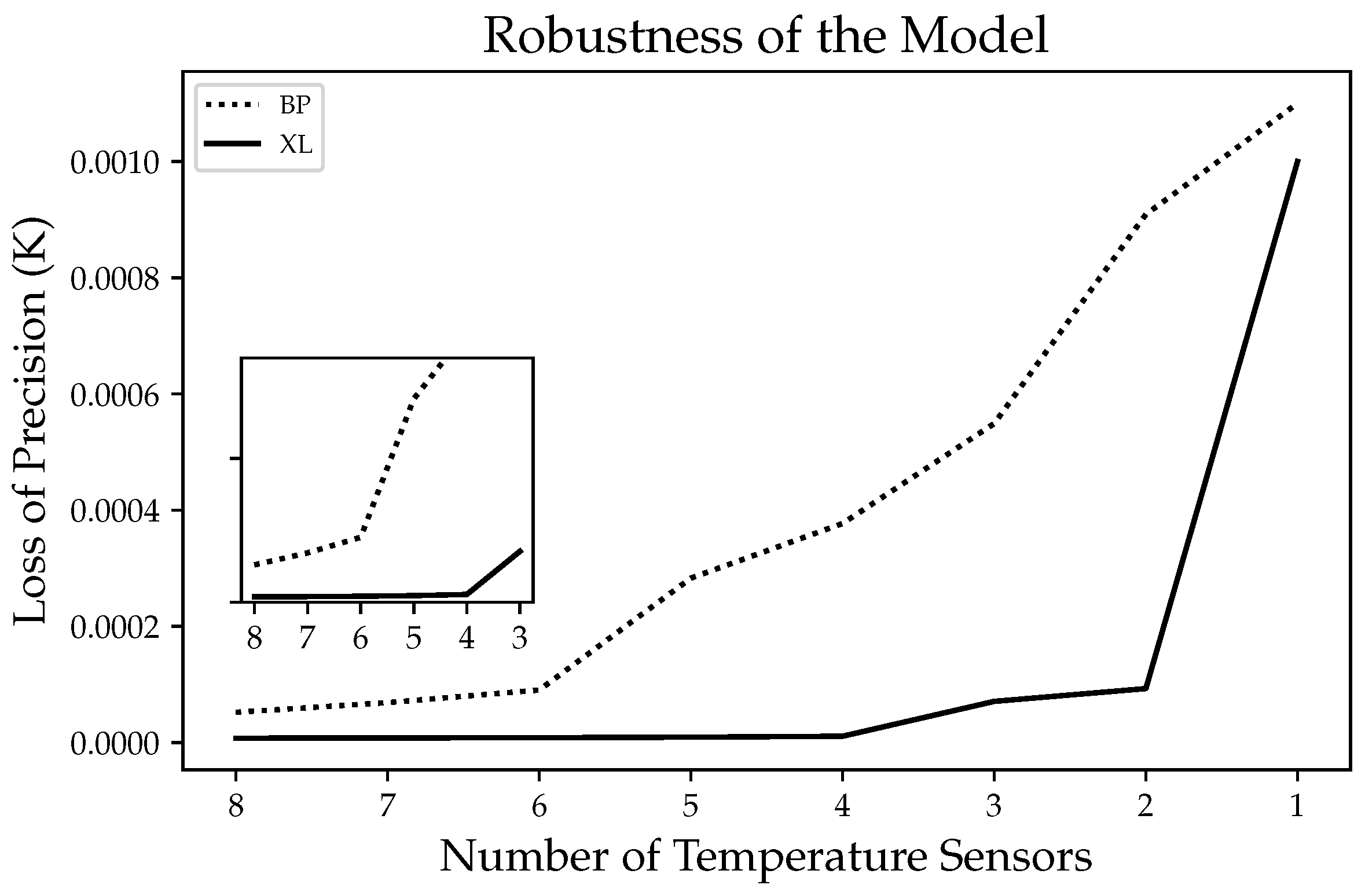
- Compared to the BP neural network, the algorithm is less dependent on the number of temperature sensors.
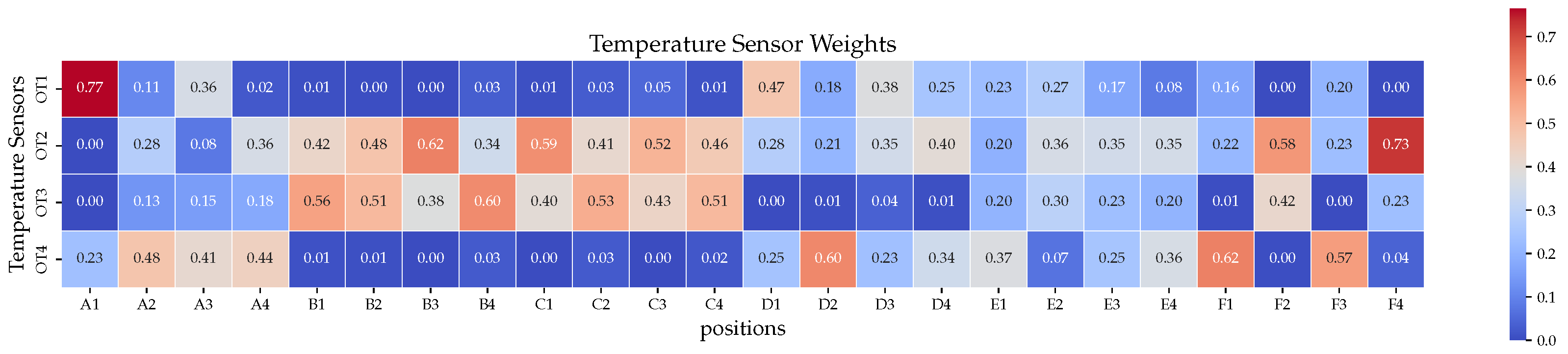
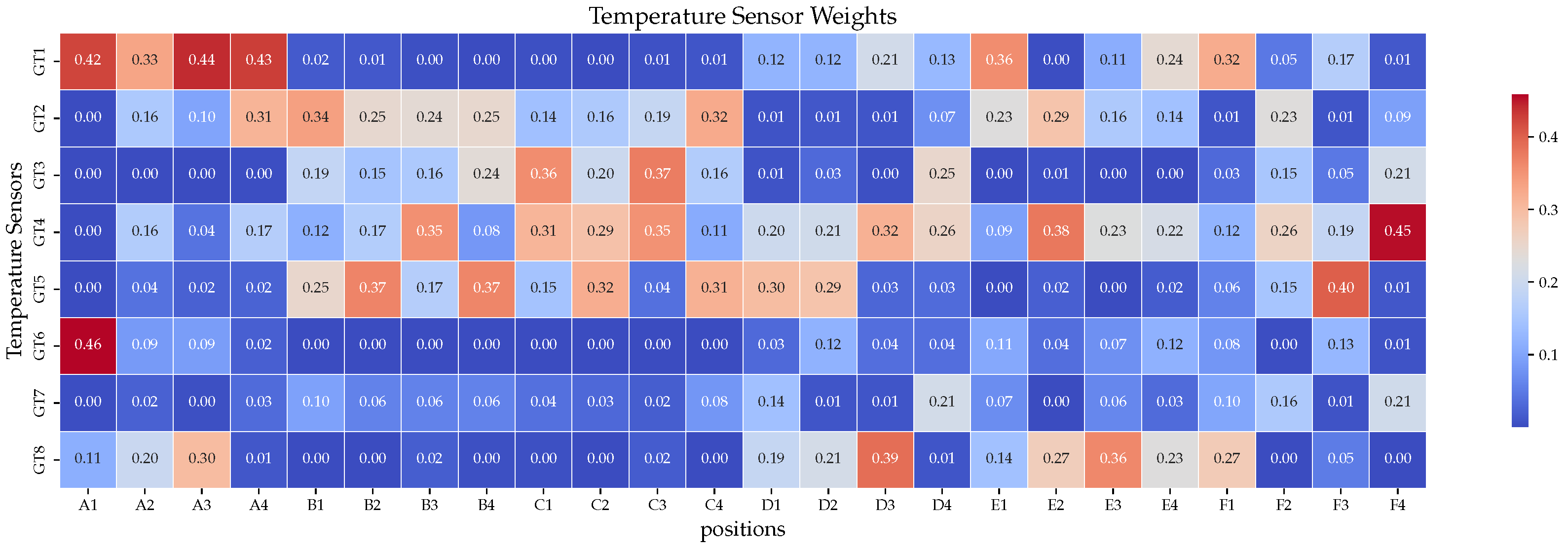
- The intermediate output of the algorithm presents the weight information of the temperature sensors, which can be determined through further experiments to ascertain the optimal number and placement of temperature sensors.
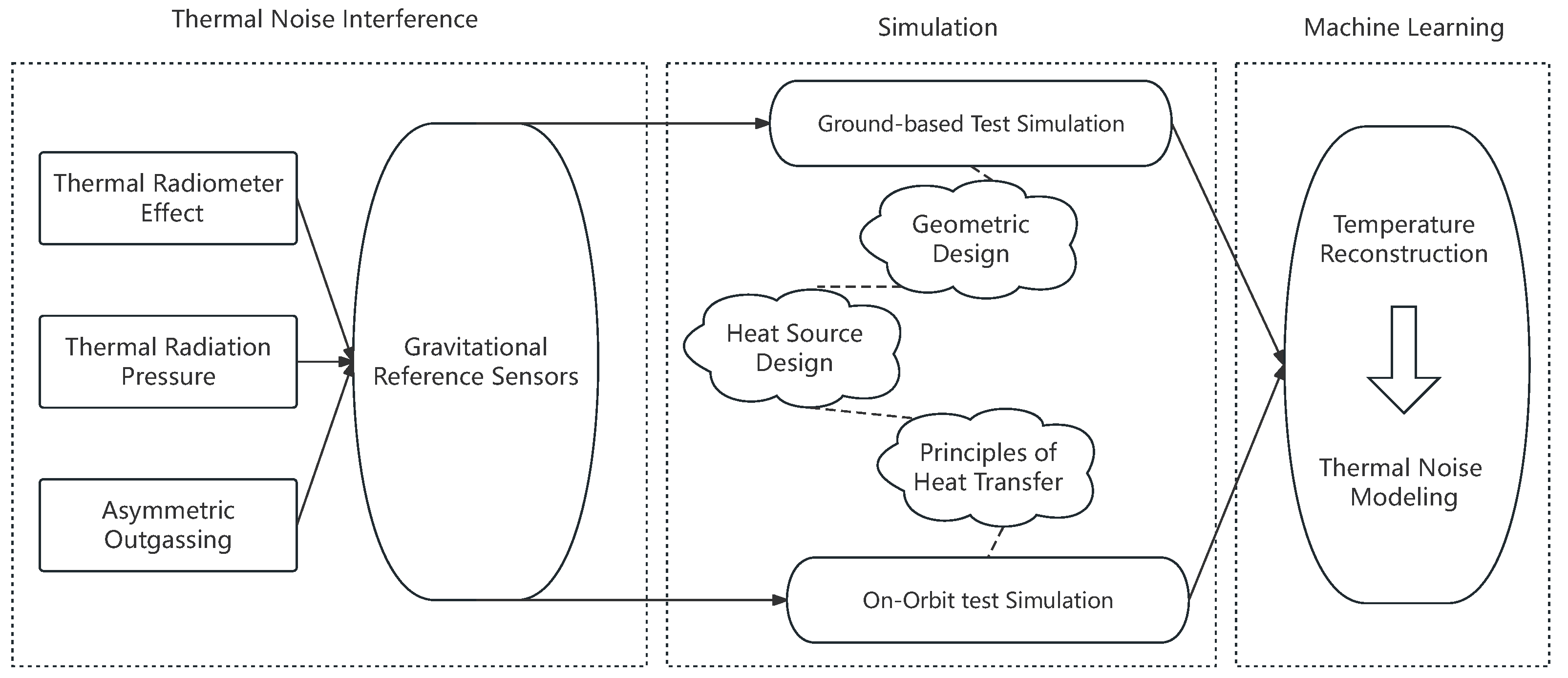
2. Analysis of Temperature Noise Impact
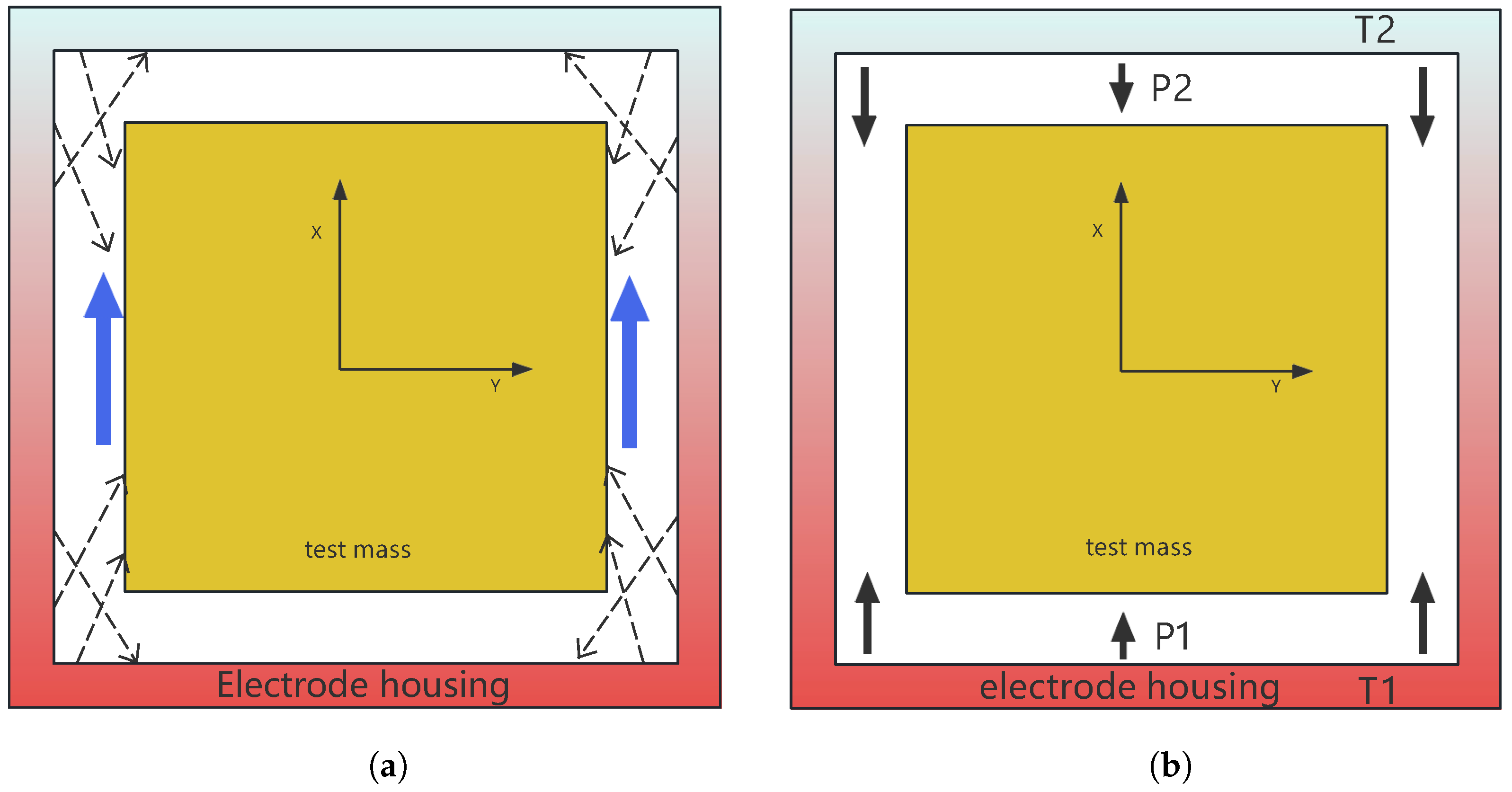
2.1. Thermal Radiometer Effect
2.2. Thermal Radiation Pressure
2.3. Asymmetric Outgassing
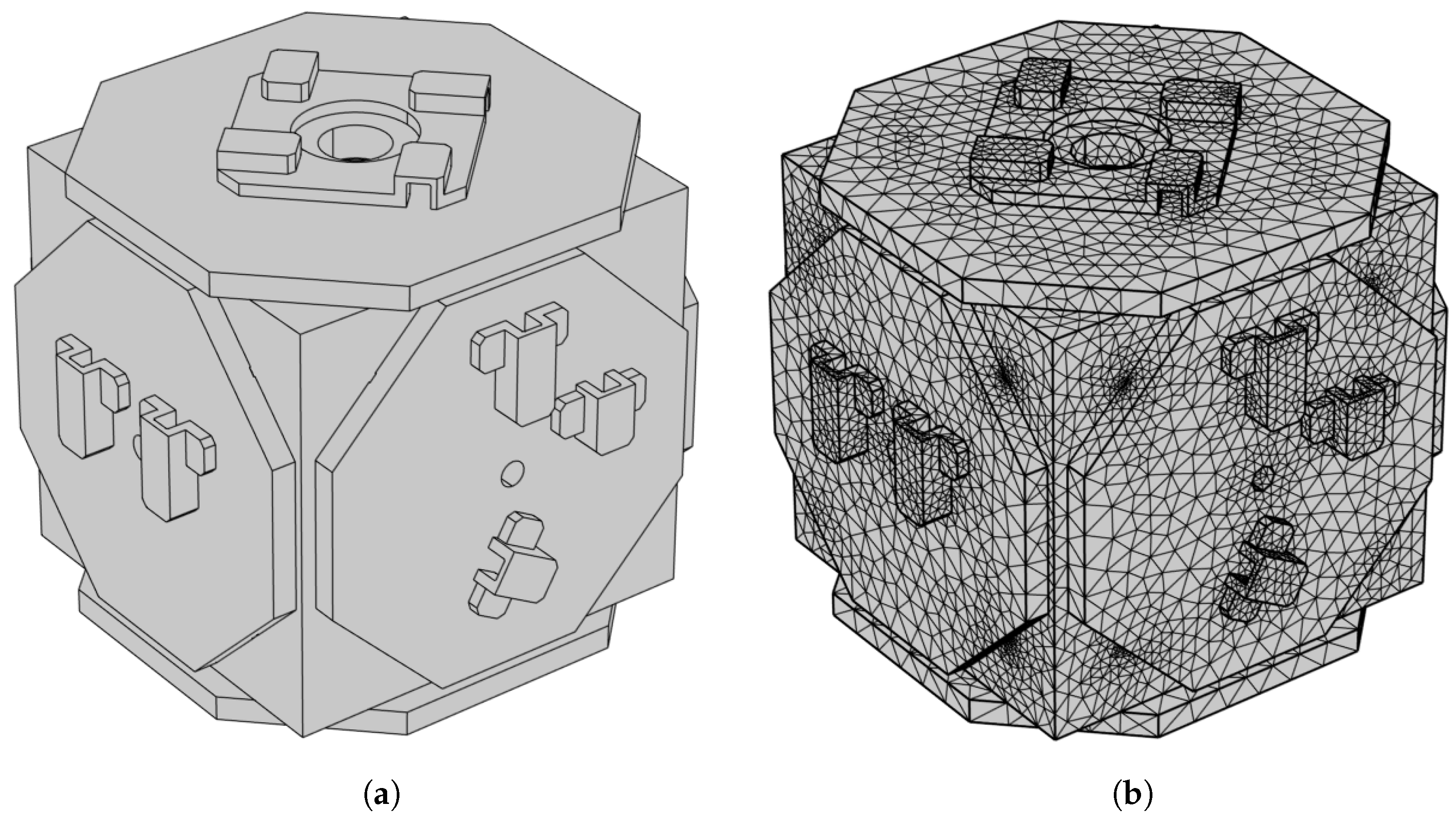
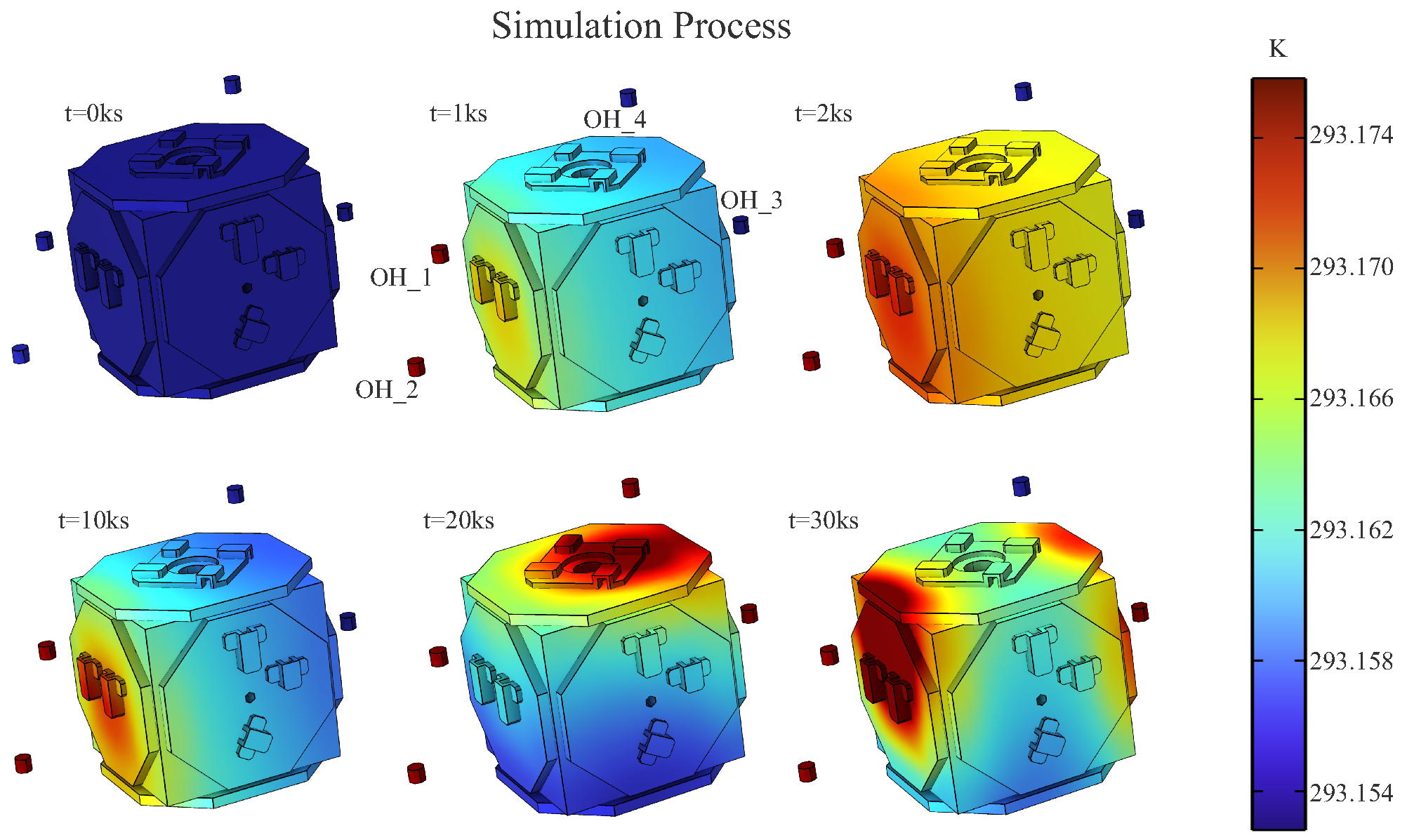
3. Simulation
3.1. General Description of Simulation
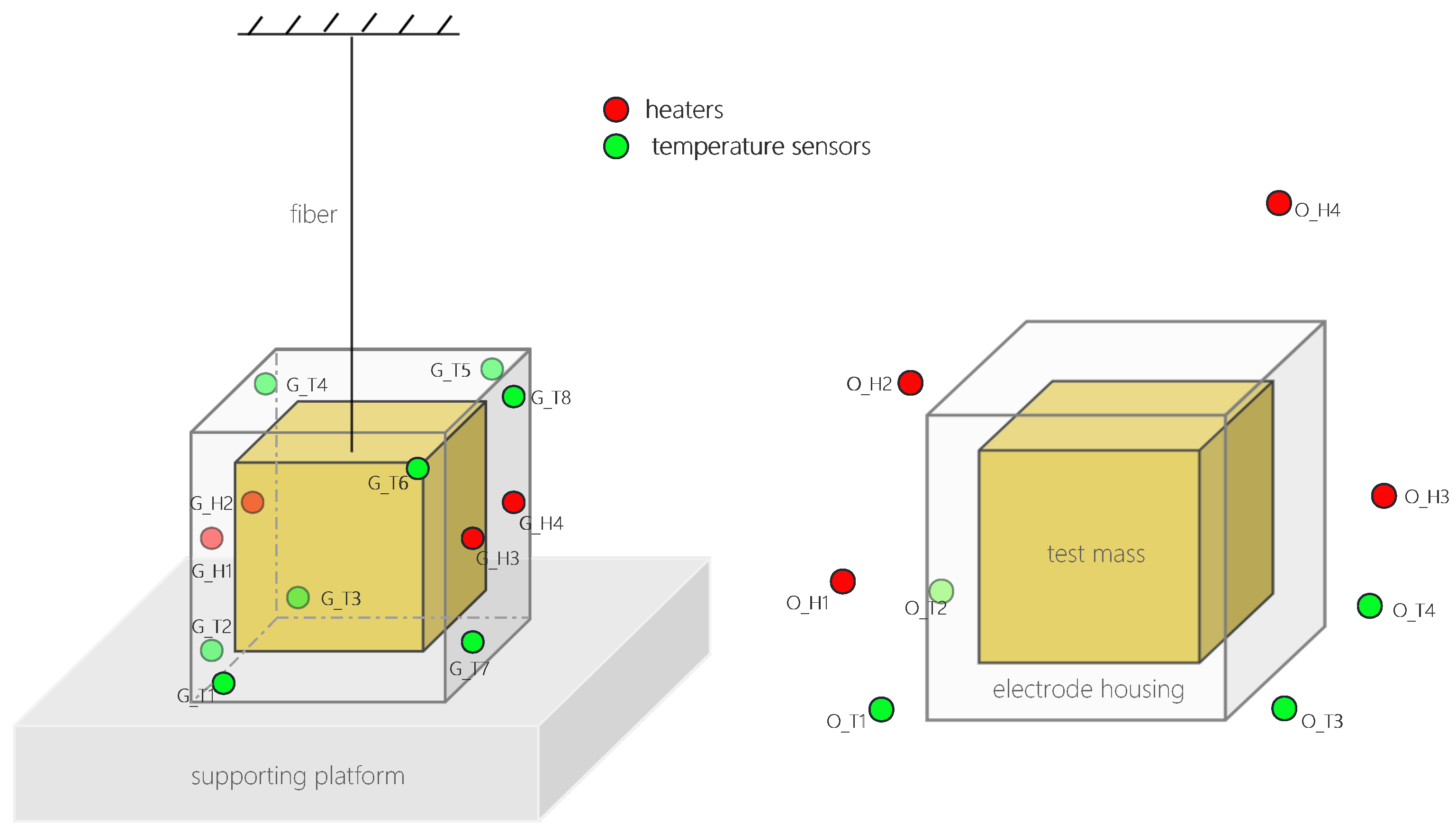
3.1.1. Ground-Based Test Simulation
3.1.2. On-Orbit Test Simulation
3.2. Simulation Results
3.2.1. Ground-Based Test Simulation Data
3.2.2. On-Orbit Test Simulation Data
4. Methods
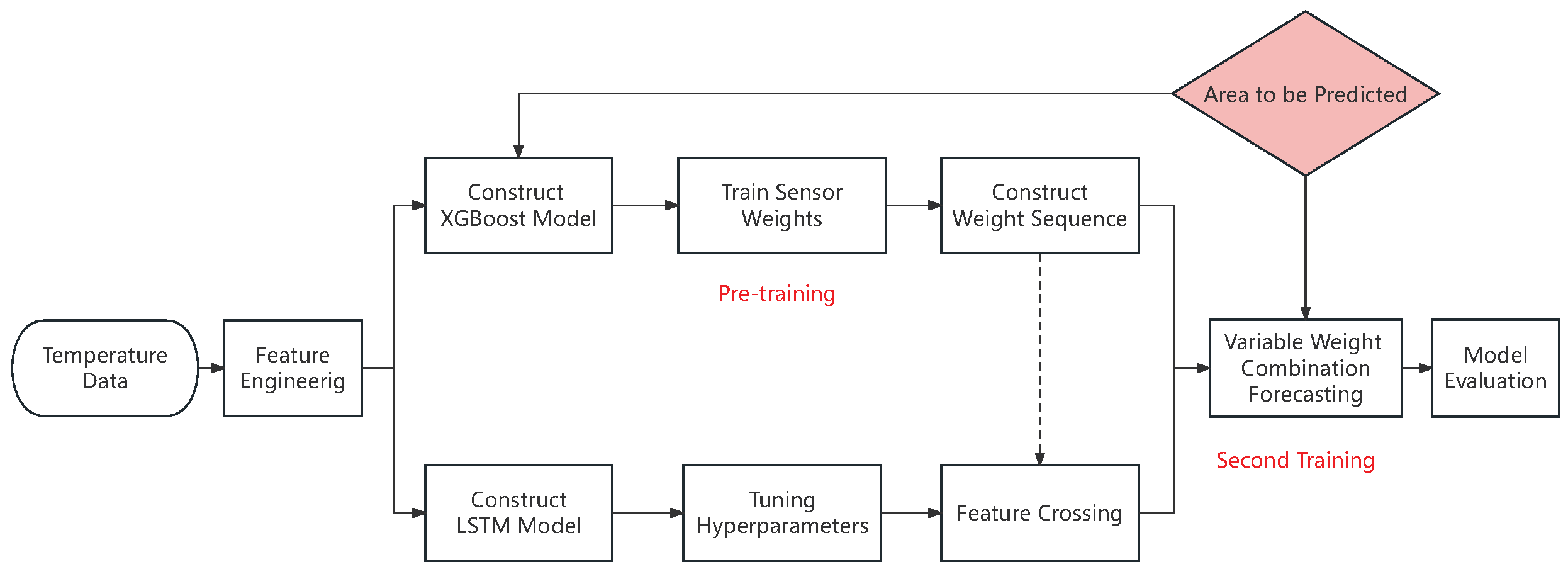
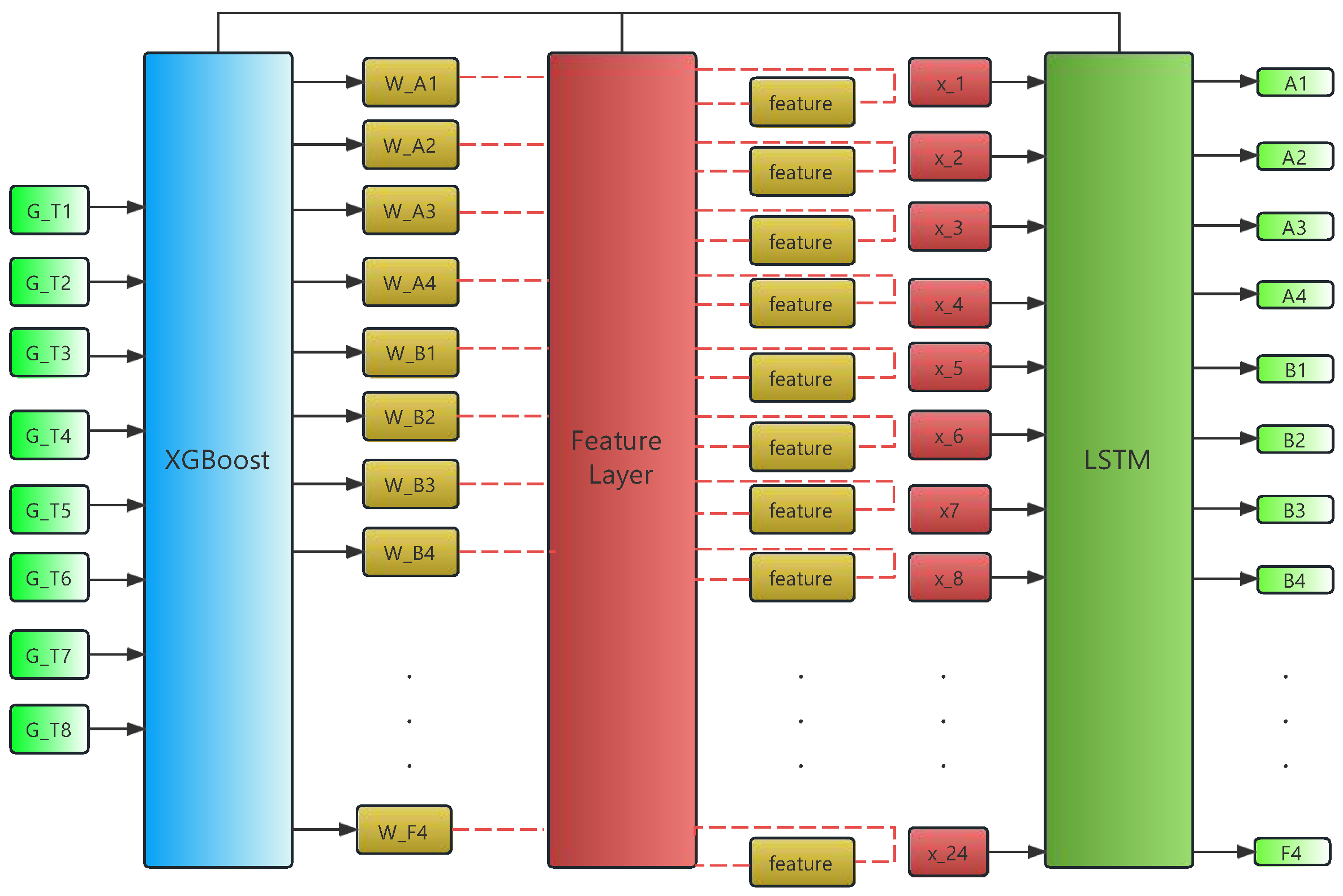
4.1. XGBoost-LSTM Algorithm
4.1.1. XGBoost
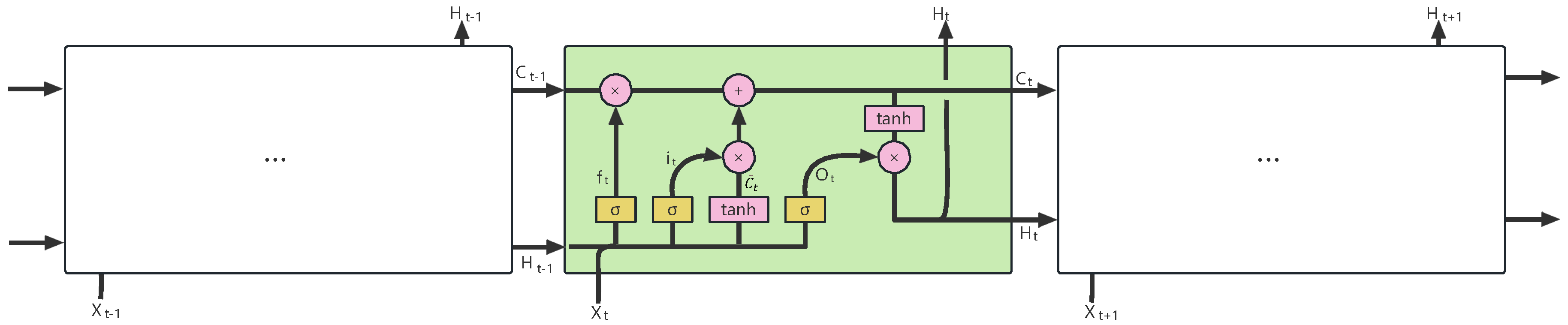
4.1.2. LSTM
4.1.3. Algorithm Implementation Principles
4.2. Other Methods
4.3. Metrics
5. Results and Discussion
5.1. Reconstruction Results for Temperature Field of Sensor Head
5.1.1. Reconstruction Results of Ground Test Data
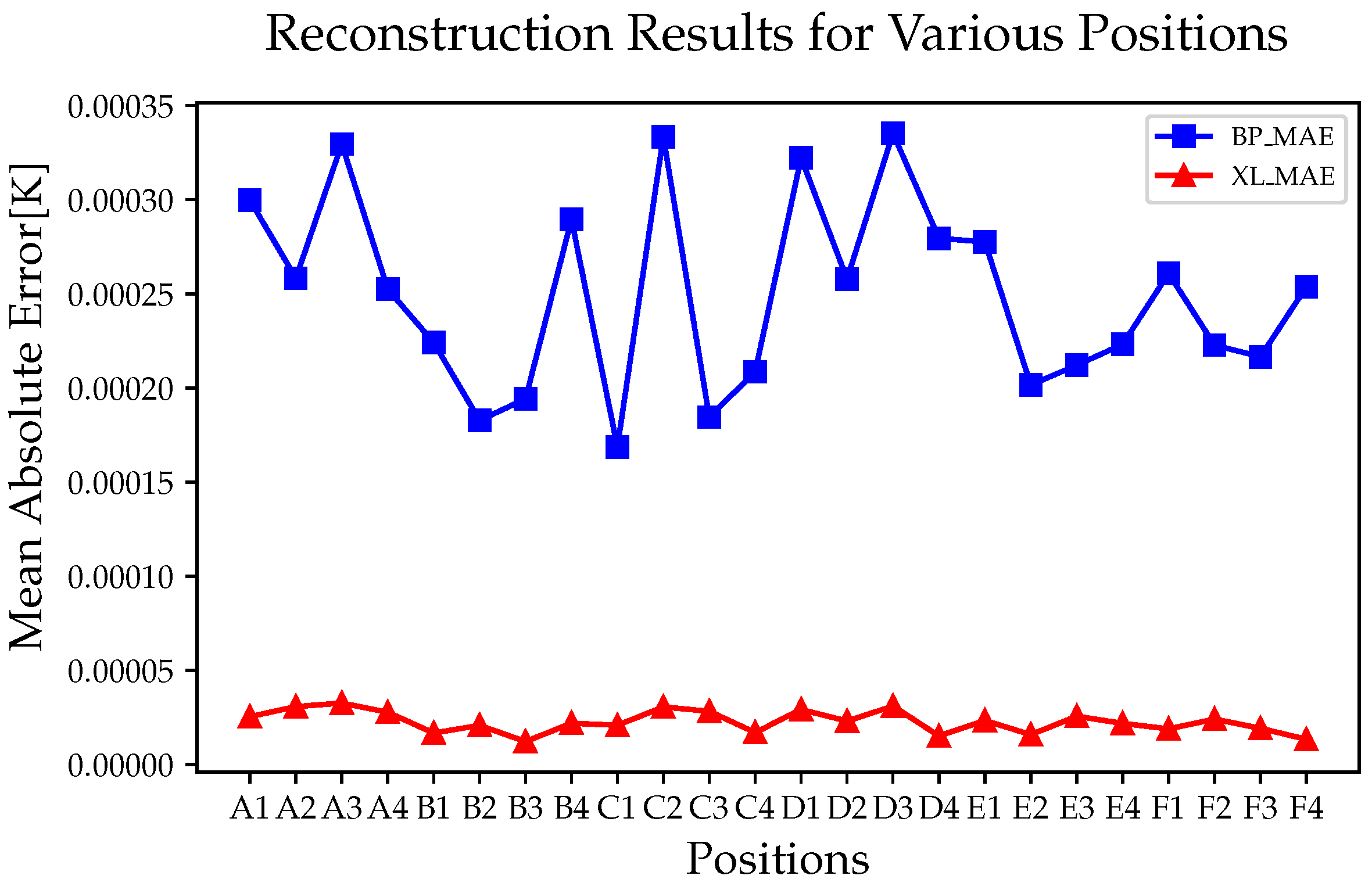
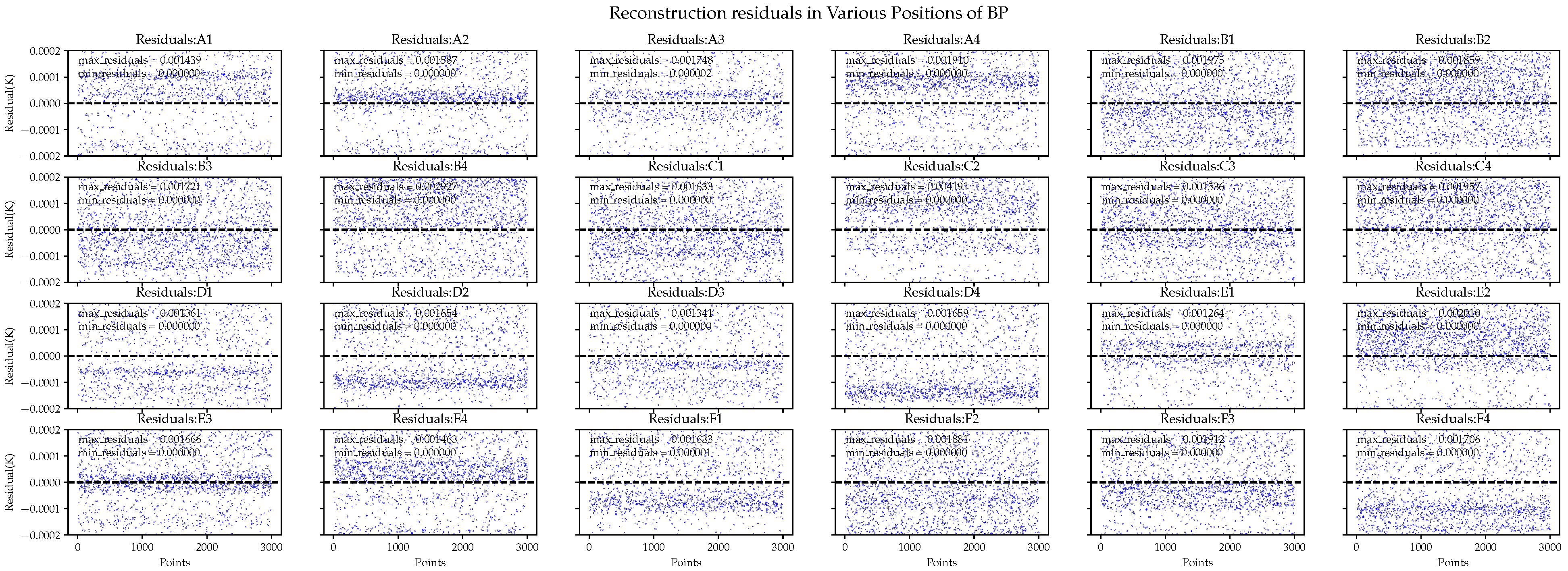
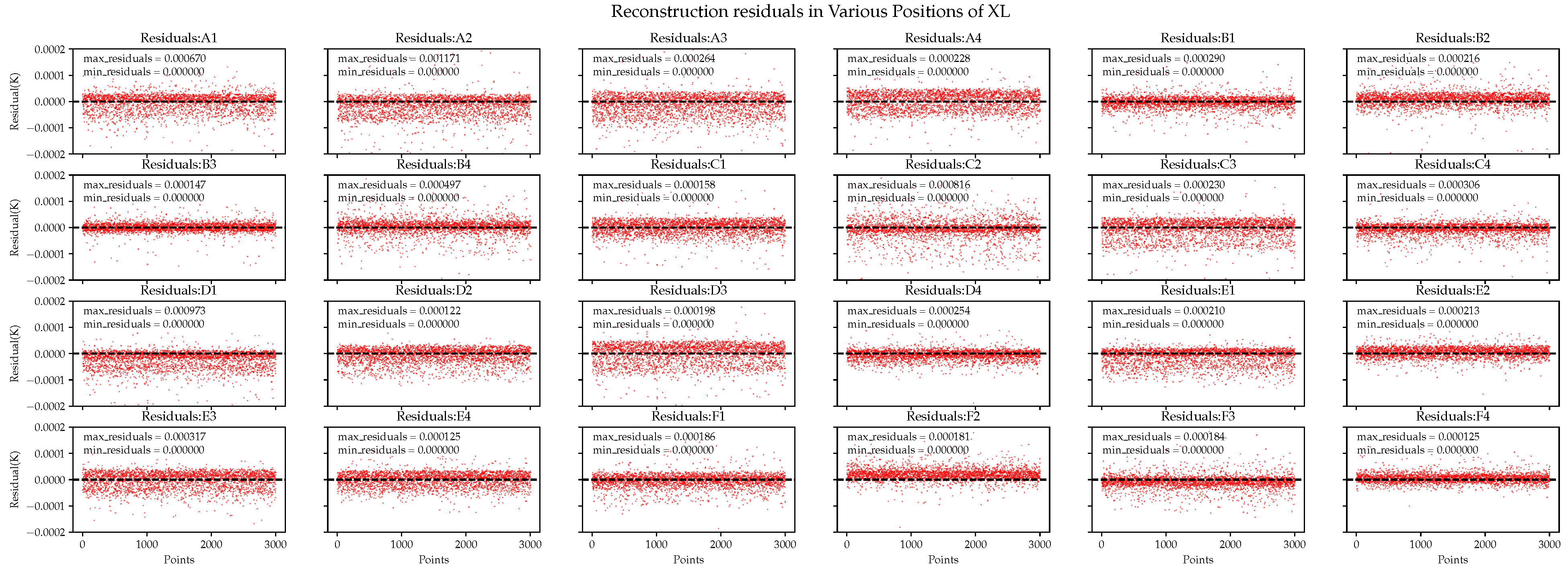
5.1.2. Reconstruction Results for On-Orbit Test Data
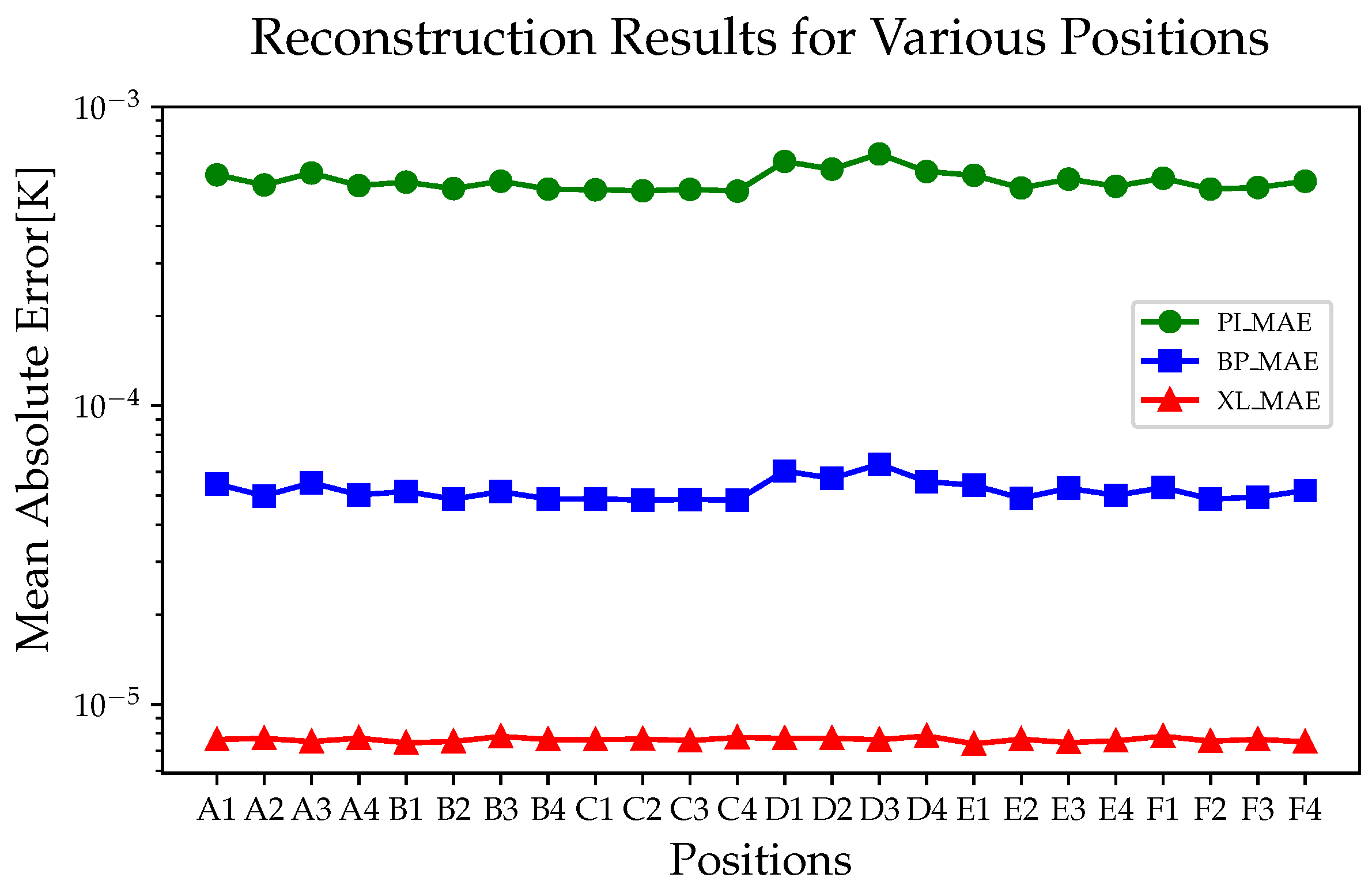
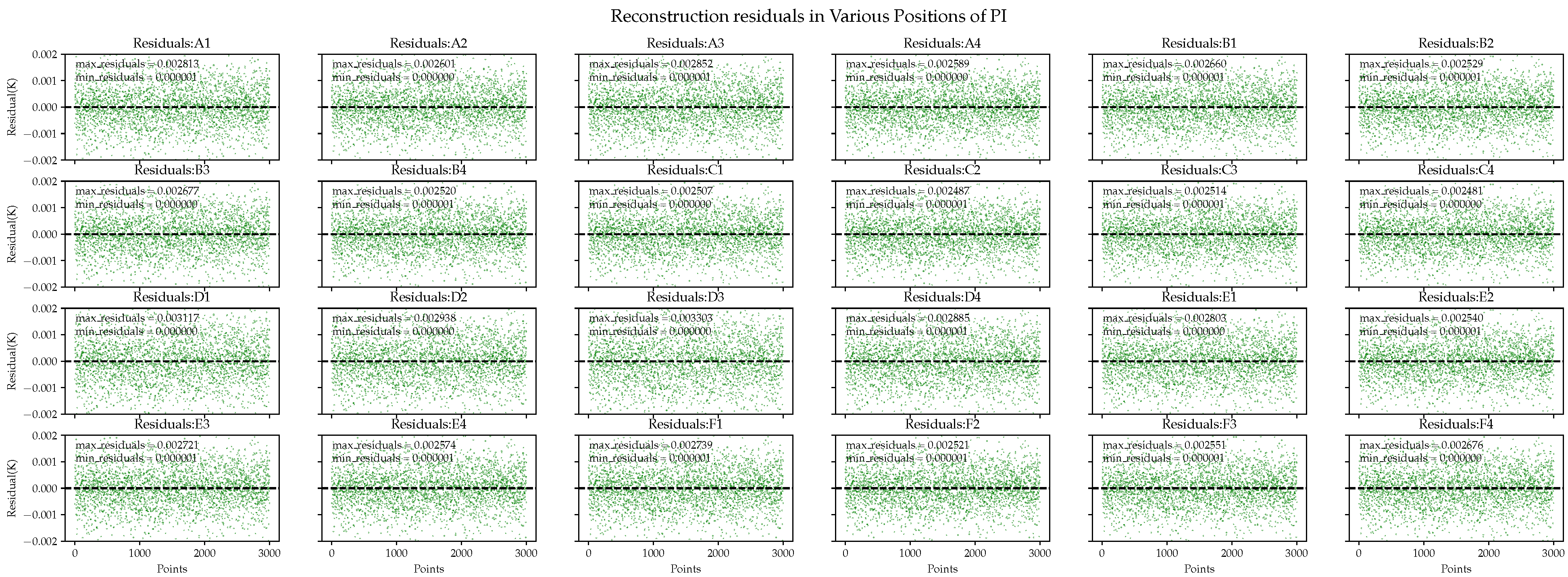
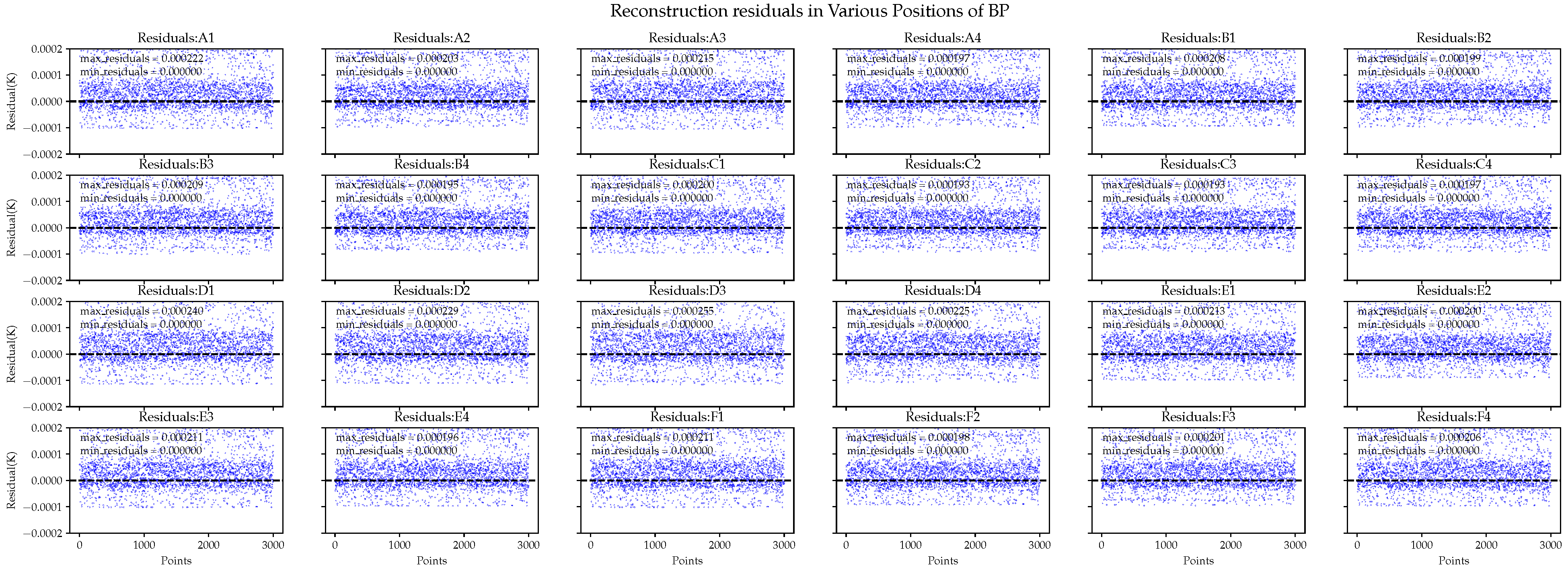
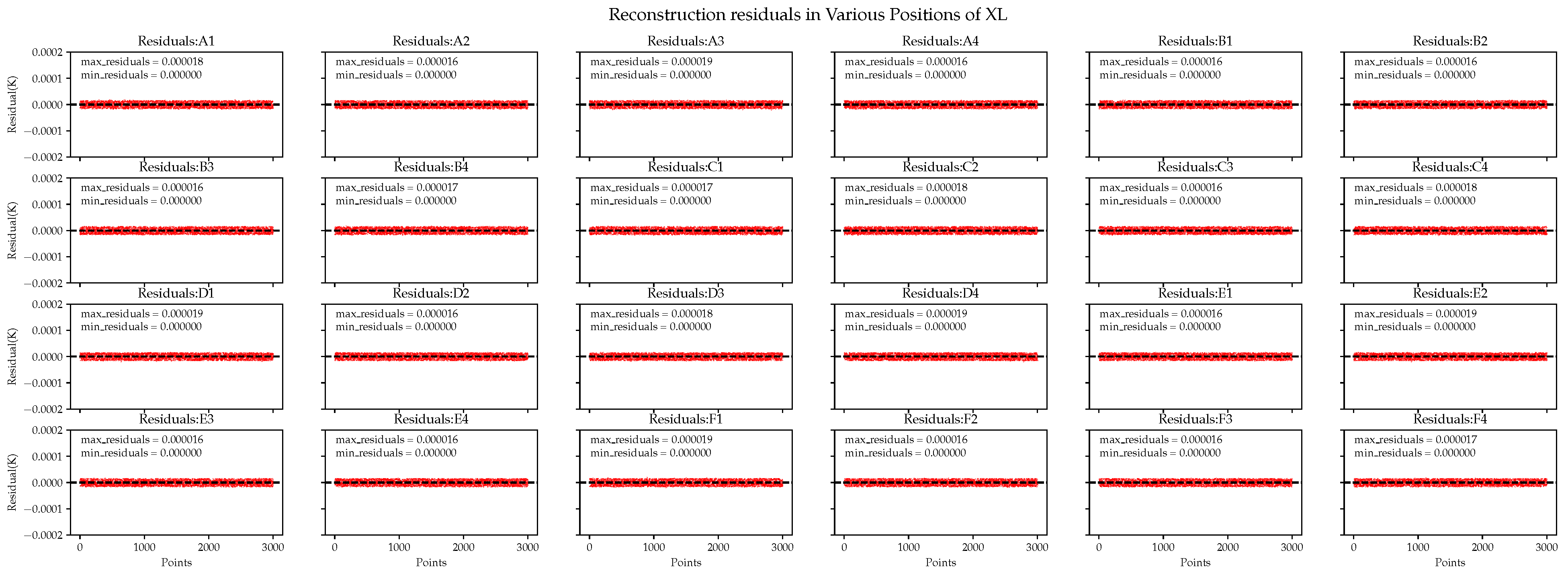
5.2. Discussion of Reconstruction Accuracy
5.3. Discussion of Robustness of Algorithm
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| TM | Test mass |
| EH | Electrode housing |
| LPF | LISA PathFinder |
| EP | Equivalence principle |
| BP | Back propagation neural network |
| PI | Polynomial interpolation |
| XGBoost | Extreme gradient boosting |
| LSTM | Long short-term memory network |
| XL | XGBoost-LSTM |
References
- Armano, M.; Audley, H.; Baird, J.; Binetruy, P.; Born, M.; Bortoluzzi, D.; Brandt, N.; Castelli, E.; Cavalleri, A.; Cesarini, A.; et al. Sensor Noise in LISA Pathfinder: In-Flight Performance of the Optical Test Mass Readout. Phys. Rev. Lett. 2021, 126, 131103. [Google Scholar] [CrossRef]
- Luo, J.; Chen, L.; Duan, H.; Gong, Y.; Hu, S.; Ji, J.; Liu, Q.; Mei, J.; Milyukov, V.; Sazhin, M. Tianqin: A space-borne gravitational wave detector. Class. Quantum Gravity 2015, 33, 035010. [Google Scholar] [CrossRef]
- Cyranoski, D. Chinese gravitational-wave hunt hits crunch time. Nature 2016, 531, 150–151. [Google Scholar] [CrossRef]
- Luo, Z.; Guo, Z.; Jin, G.; Wu, Y.; Hu, W. A brief analysis to Taiji: Science and technology. Results Phys. 2020, 10, 102918. [Google Scholar] [CrossRef]
- Wu, Y.L.; Luo, Z.R.; Wang, J.Y.; Bai, M.; Zou, Z.M. China’s first step towards probing the expanding universe and the nature of gravity using a space borne gravitational wave antenna. Commun. Phys. 2021, 4, 34. [Google Scholar]
- Hu, W.; Wu, Y. Taiji program in space for gravitational wave physics and nature of gravity. Natl. Sci. Rev. 2017, 4, 685–686. [Google Scholar] [CrossRef]
- Zhang, H.; Xu, P.; Ye, Z.; Ye, D.; Qiang, L.-E.; Luo, Z.; Qi, K.; Wang, S.; Cai, Z.; Wang, Z.; et al. A Systematic Approach for Inertial Sensor Calibration of Gravity Recovery Satellites and Its Application to Taiji-1 Mission. Remote Sens. 2023, 15, 3817. [Google Scholar] [CrossRef]
- Touboul, P.; Willemenot, E.; Foulon, B.; Josselin, V. GRACE and GOCE space missions: Synergy and evolution. Boll. Geofis. Teor. Appl. 1999, 40, 321–327. [Google Scholar]
- Heinzel, G.; Wand, V.; García, A.; Jennrich, O.; Braxmaier, C.; Robertson, D.; Middleton, K.; Hoyland, D.; Rüdiger, A.; Schilling, R.; et al. The LTP interferometer and phasemeter. Class. Quantum Gravity 2004, 21, S581. [Google Scholar] [CrossRef][Green Version]
- Liu, Y.; Yu, T.; Wang, Y.; Zhao, Z.; Wang, Z. High-Precision Inertial Sensor Charge Ground Measurement Method Based on Phase-Sensitive Demodulation. Sensors 2024, 24, 1009. [Google Scholar] [CrossRef]
- Araújo, H.; Boatella, C.; Chmeissani, M.; Conchillo, A.; García-Berro, E.; Grimani, C.; Hajdas, W.; Lobo, A.; Ll, M.; Nofrarias, M.; et al. LISA and LISA PathFinder, the endeavour to detect low frequency GWs. J. Phys. Conf. Ser. 2007, 66, 012003. [Google Scholar] [CrossRef]
- Cañizares, P.; Conchillo, A.; García-Berro, E.; Gesa, L.; Grimani, C.; Lloro, I.; Lobo, A.; Mateos, I.; Nofrarias, M.; Ramos-Castro, J.; et al. The diagnostics subsystem on board LISA Pathfinder and LISA. Class. Quantum Gravity 2009, 26, 094005. [Google Scholar] [CrossRef][Green Version]
- Lobo, J.A. Effect of a weak plane GW on a light beam. Class. Quantum Gravity 1992, 9, 1385. [Google Scholar] [CrossRef]
- Harvey, N.; Mccullough, C.M.; Save, H. Modeling GRACE-FO accelerometer data for the version 04 release. Adv. Space Res. Off. J. Comm. Space Res. (COSPAR) 2022, 69, 1393–1407. [Google Scholar] [CrossRef]
- Nobili, A.M.; Bramanti, D.; Comandi, G.L.; Toncelli, R.; Polacco, E. Radiometer effect in the µSCOPE space mission. New Astron. 2002, 7, 521–529. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Baird, J.; Binetruy, P.; Born, M.; Bortoluzzi, D.; Castelli, E.; Cavalleri, A.; Cesarini, A.; Cruise, A.M.; et al. Temperature stability in the sub-milliHertz band with LISA Pathfinder. Mon. Not. R. Astron. Soc. 2019, 486, 3368–3379. [Google Scholar] [CrossRef]
- Gibert, F.; Nofrarias, M.; Diaz-Aguiló, M.; Lobo, A.; Karnesis, N.; Mateos, I.; Sanjuán, J.; Lloro, I.; Gesa, L.; Martín, V. State-space modelling for heater induced thermal effects on LISA Pathfinder’s Test Masses. J. Phys. Conf. 2012, 363, 012044. [Google Scholar] [CrossRef]
- Gustavsen, B.; Semlyen, A. Rational approximation of frequency domain responses by vector fitting. IEEE Trans. Power Deliv. 1999, 14, 1052–1061. [Google Scholar] [CrossRef]
- Ren, L.; Chen, L.; Meng, X.; Wang, Z. Thermal design of ground weak force measurement system for inertial sensors. Chin. Opt. 2023, 16, 1404. [Google Scholar]
- Peng, X.; Jin, H.; Xu, P.; Wang, Z.; Luo, Z.; Ma, X.; Qiang, L.-E.; Tang, W.; Ma, X.; Zhang, Y.; et al. System modeling in data processing of Taiji-1 mission. Int. J. Mod. Phys. A 2021, 36, 2140026. [Google Scholar] [CrossRef]
- Everitt, C.W.F.; DeBra, D.B.; Parkinson, B.W.; Turneaure, J.P.; Conklin, J.W.; Heifetz, M.I.; Keiser, G.M.; Silbergleit, A.S.; Holmes, T.; Kolodziejczak, J.; et al. Gravity Probe B: Final Results of a Space Experiment to Test General Relativity. Phys. Rev. Lett. 2011, 106, 221101. [Google Scholar] [CrossRef] [PubMed]
- Gibert, F.; Nofrarias, M.; Karnesis, N.; Gesa, L.; Martín, V.; Mateos, I.; Lobo, A.; Flatscher, R.; Gerardi, D.; Burkhardt, J.; et al. Thermo-elastic induced phase noise in the LISA Pathfinder spacecraft. Class. Quantum Gravity 2015, 32, 045014. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Auger, G.; Baird, J.; Binetruy, P.; Born, M.; Bortoluzzi, D.; Brandt, N.; Bursi, A.; Caleno, M.; et al. In-flight thermal experiments for LISA Pathfinder: Simulating temperature noise at the Inertial Sensors. J. Phys. Conf. Ser. 2015, 610, 012023. [Google Scholar] [CrossRef]
- Basov, M. Schottky diode temperature sensor for pressure sensor. Sens. Actuators A Phys. 2021, 331, 112930. [Google Scholar] [CrossRef]
- Cahoon, C.; Baker, R.J. Low-voltage CMOS temperature sensor design using schottky diode-based references. In Proceedings of the 2008 IEEE Workshop on Microelectronics and Electron Devices, Boise, ID, USA, 8 April 2008; pp. 16–19. [Google Scholar]
- Knyaginin, D.; Rybalka, S.; Drakin, A.Y.; Demidov, A. In Ti/4H-SiC Schottky diode with breakdown voltage up to 3 kV. J. Phys. Conf. Ser. 2019, 1410, 012196. [Google Scholar] [CrossRef]
- Mateos, I.; Díaz-Aguiló, M.; Ramos-Castro, J.; García-Berro, E.; Lobo, A. Interpolation of the magnetic field at the test masses in eLISA. Class. Quantum Gravity 2015, 32, 165003. [Google Scholar] [CrossRef]
- Scarr, R.; Setterington, R. Thermistors, Their Theory, Manufacture and Application. IRE Trans. Compon. Parts 1961, 8, 6–22. [Google Scholar] [CrossRef]
- Sanjuán, J.; Lobo, A.; Nofrarias, M.; Mateos, N.; Xirgu, X.; Cañizares, P.; Ramos-Castro, J. Magnetic polarization effects of temperature sensors and heaters in LISA Pathfinder. Rev. Sci. Instrum. 2008, 79, 084503. [Google Scholar] [CrossRef]
- Sanjuan, J.; Nofrarias, M. Non-linear quantization error reduction for the temperature measurement subsystem on-board LISA Pathfinder. Rev. Sci. Instrum. 2018, 89, 045004. [Google Scholar] [CrossRef] [PubMed]
- George, D.; Huerta, E.A. Deep Learning for real-time gravitational wave detection and parameter estimation: Results with Advanced LIGO data. Phys. Lett. B 2018, 778, 64–70. [Google Scholar] [CrossRef]
- Carrillo, M.; Gracia-Linares, M.; González, J.A.; Guzmán, F.S. Parameter estimates in binary black hole collisions using neural networks. Sensors 2016, 48, 141. [Google Scholar] [CrossRef]
- Diaz-Aguiló, M.; García-Berro, E.; Lobo, A. Theory and modelling of the magnetic field measurement in LISA PathFinder. Class. Quantum Gravity 2010, 27, 035005. [Google Scholar] [CrossRef]
- Diaz-Aguilo, M.; Lobo, A.; García-Berro, E. Neural network interpolation of the magnetic field for the LISA Pathfinder Diagnostics Subsystem. Exp. Astron. 2011, 30, 1–21. [Google Scholar] [CrossRef]
- Vedurmudi, A.P.; Janzen, K.; Nagler, M.; Eichstaedt, S. Uncertainty-aware temperature interpolation for measurement rooms using ordinary Kriging. Meas. Sci. Technol. 2023, 34, 064007. [Google Scholar] [CrossRef]
- Sanjuán, J.; Lobo, A.; Ramos-Castro, J.; Mateos, N.; Díaz-Aguiló, M. ADC non-linear error corrections for low-noise temperature measurements in the LISA band. J. Phys. Conf. Ser. 2010, 228, 012041. [Google Scholar] [CrossRef]
- Luo, Z.; Wang, Y.; Wu, Y.; Hu, W.; Jin, G. The Taiji program: A concise overview. Prog. Theor. Exp. Phys. 2021, 2021, 05A108. [Google Scholar] [CrossRef]
- Carbone, L.; Cavalleri, A.; Dolesi, R.; Hoyle, C.D.; Hueller, M.; Vitale, S.; Weber, W.J. Characterization of disturbance sources for LISA: Torsion pendulum results. Class. Quantum Gravity 2005, 22, S509. [Google Scholar] [CrossRef]
- Carbone, L.; Cavalleri, A.; Ciani, G.; Dolesi, R.; Hueller, M.; Tombolato, D.; Vitale, S.; Weber, W. Thermal gradient-induced forces on geodetic reference masses for LISA. Phys. Rev. D 2007, 76, 102003. [Google Scholar] [CrossRef]
- Dietterich, T.G. An Experimental Comparison of Three Methods for Constructing Ensembles of Decision Trees: Bagging, Boosting, and Randomization. Mach. Learn. 2000, 40, 139–157. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Abuqaddom, I.; Mahafzah, B.A.; Faris, H. Oriented stochastic loss descent algorithm to train very deep multi-layer neural networks without vanishing gradients. Knowl.-Based Syst. 2021, 230, 107391. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Data-partitioning method 1 | 8:1:1 |
| Optimizer 2 | adam |
| Learning rate 2 | 0.01 |
| Activation 2 | linear |
| XL-max_depth | 12 |
| XL-n_estimators | 500 |
| LSTM-No. layers | 5 |
| LSTM-droupout | 0.2 |
| LSTM-trainable params | 34,024 |
| BP-No. layers | 3 |
| BP-trainable params | 3704 |
| Area | MAE (K) | RMSE (K) | MRE () | ||||||
|---|---|---|---|---|---|---|---|---|---|
| PI | BP | XL | PI | BP | XL | PI | BP | XL | |
| A1 | 593 | 54.6 | 7.63 | 763 | 76.0 | 8.79 | 202 | 18.6 | 2.6 |
| A2 | 548 | 49.9 | 7.69 | 705 | 69.7 | 8.86 | 187 | 17.0 | 2.62 |
| A3 | 601 | 55.2 | 7.5 | 773 | 77.0 | 8.7 | 205 | 18.8 | 2.56 |
| A4 | 546 | 50.3 | 7.71 | 702 | 70.1 | 8.84 | 186 | 17.2 | 2.63 |
| B1 | 560 | 51.5 | 7.43 | 721 | 71.6 | 8.65 | 191 | 17.6 | 2.53 |
| B2 | 533 | 48.7 | 7.49 | 686 | 68.0 | 8.67 | 182 | 16.6 | 2.56 |
| B3 | 564 | 51.5 | 7.81 | 726 | 71.9 | 8.99 | 192 | 17.6 | 2.66 |
| B4 | 531 | 48.7 | 7.64 | 683 | 67.9 | 8.84 | 181 | 16.6 | 2.61 |
| C1 | 528 | 48.7 | 7.62 | 679 | 68.1 | 8.83 | 180 | 16.6 | 2.6 |
| C2 | 524 | 48.3 | 7.65 | 674 | 67.3 | 8.8 | 179 | 16.5 | 2.61 |
| C3 | 530 | 48.5 | 7.58 | 681 | 67.7 | 8.8 | 181 | 16.5 | 2.59 |
| C4 | 523 | 48.3 | 7.74 | 672 | 67.6 | 8.88 | 178 | 16.5 | 2.64 |
| D1 | 657 | 60.4 | 7.71 | 845 | 84.4 | 8.91 | 224 | 20.6 | 2.63 |
| D2 | 619 | 57.2 | 7.69 | 796 | 80.1 | 8.89 | 211 | 19.5 | 2.62 |
| D3 | 696 | 63.7 | 7.61 | 895 | 89.2 | 8.77 | 237 | 21.7 | 2.6 |
| D4 | 608 | 55.7 | 7.83 | 782 | 77.6 | 9.02 | 207 | 19.0 | 2.67 |
| E1 | 591 | 54.1 | 7.4 | 760 | 75.8 | 8.64 | 201 | 18.5 | 2.52 |
| E2 | 536 | 49.0 | 7.64 | 689 | 68.3 | 8.8 | 183 | 16.7 | 2.6 |
| E3 | 574 | 52.9 | 7.44 | 738 | 74.0 | 8.61 | 196 | 18.1 | 2.54 |
| E4 | 542 | 50.1 | 7.56 | 698 | 69.9 | 8.75 | 185 | 17.1 | 2.58 |
| F1 | 577 | 53.2 | 7.81 | 743 | 74.0 | 8.97 | 197 | 18.1 | 2.67 |
| F2 | 531 | 48.7 | 7.54 | 683 | 67.9 | 8.72 | 181 | 16.6 | 2.57 |
| F3 | 537 | 49.4 | 7.64 | 691 | 69.2 | 8.84 | 183 | 16.8 | 2.6 |
| F4 | 564 | 51.9 | 7.49 | 725 | 72.2 | 8.67 | 192 | 17.7 | 2.56 |
| AVG | 567 | 52.1 | 7.61 | 729 | 72.7 | 8.80 | 193 | 17.7 | 2.59 |
| MIN | 523 | 48.3 | 7.4 | 672 | 67.3 | 8.61 | 178 | 16.5 | 2.52 |
| MAX | 696 | 63.7 | 7.83 | 895 | 89.2 | 9.02 | 237 | 21.7 | 2.67 |
| Area | MAE (K) | RMSE (K) | MRE () | |||
|---|---|---|---|---|---|---|
| BP | XL | BP | XL | BP | XL | |
| A1 | 300 | 25.4 | 392 | 38.9 | 102 | 8.68 |
| A2 | 258 | 30.8 | 365 | 54.1 | 88.1 | 10.5 |
| A3 | 330 | 32.6 | 446 | 47.6 | 112 | 11.1 |
| A4 | 252 | 27.8 | 372 | 34.7 | 86.1 | 9.47 |
| B1 | 224 | 16.7 | 391 | 25.9 | 76.4 | 5.71 |
| B2 | 183 | 20.8 | 320 | 29.8 | 62.3 | 7.09 |
| B3 | 194 | 12.2 | 301 | 18.1 | 66.2 | 4.16 |
| B4 | 290 | 22.0 | 521 | 37.0 | 98.8 | 7.49 |
| C1 | 169 | 20.9 | 266 | 27.7 | 57.5 | 7.12 |
| C2 | 333 | 30.6 | 633 | 59.4 | 114 | 10.4 |
| C3 | 185 | 28.3 | 290 | 39.1 | 62.9 | 9.64 |
| C4 | 209 | 17.0 | 343 | 26.2 | 71.2 | 5.79 |
| D1 | 322 | 29.2 | 420 | 48.3 | 110 | 9.97 |
| D2 | 258 | 23.1 | 349 | 31.1 | 87.9 | 7.87 |
| D3 | 335 | 31.1 | 441 | 39.3 | 114 | 10.6 |
| D4 | 279 | 15.2 | 376 | 21.4 | 95.3 | 5.17 |
| E1 | 278 | 23.4 | 371 | 33.4 | 94.7 | 7.98 |
| E2 | 202 | 15.9 | 357 | 20.8 | 68.8 | 5.41 |
| E3 | 212 | 25.7 | 323 | 33.1 | 72.3 | 8.75 |
| E4 | 223 | 21.9 | 325 | 27.5 | 76.1 | 7.46 |
| F1 | 261 | 18.9 | 356 | 27.5 | 89.0 | 6.45 |
| F2 | 223 | 24.1 | 362 | 30.5 | 76.0 | 8.22 |
| F3 | 217 | 19.2 | 328 | 28.4 | 73.9 | 6.56 |
| F4 | 254 | 13.4 | 357 | 18.3 | 86.5 | 4.57 |
| AVG | 249 | 22.7 | 375 | 33.2 | 85.0 | 7.75 |
| MIN | 169 | 12.2 | 266 | 18.1 | 57.5 | 4.16 |
| MAX | 335 | 32.6 | 633 | 59.4 | 114 | 11.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, Z.; Ren, F.; Qiang, L.-E.; Qi, K.; Zhang, H. Sensor Head Temperature Distribution Reconstruction of High-Precision Gravitational Reference Sensors with Machine Learning. Sensors 2024, 24, 2529. https://doi.org/10.3390/s24082529
Duan Z, Ren F, Qiang L-E, Qi K, Zhang H. Sensor Head Temperature Distribution Reconstruction of High-Precision Gravitational Reference Sensors with Machine Learning. Sensors. 2024; 24(8):2529. https://doi.org/10.3390/s24082529
Chicago/Turabian StyleDuan, Zongchao, Feilong Ren, Li-E Qiang, Keqi Qi, and Haoyue Zhang. 2024. "Sensor Head Temperature Distribution Reconstruction of High-Precision Gravitational Reference Sensors with Machine Learning" Sensors 24, no. 8: 2529. https://doi.org/10.3390/s24082529
APA StyleDuan, Z., Ren, F., Qiang, L.-E., Qi, K., & Zhang, H. (2024). Sensor Head Temperature Distribution Reconstruction of High-Precision Gravitational Reference Sensors with Machine Learning. Sensors, 24(8), 2529. https://doi.org/10.3390/s24082529