
Shape Sensing of Cantilever Column Using Hybrid Frenet–Serret Homogeneous Transformation Matrix Method



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
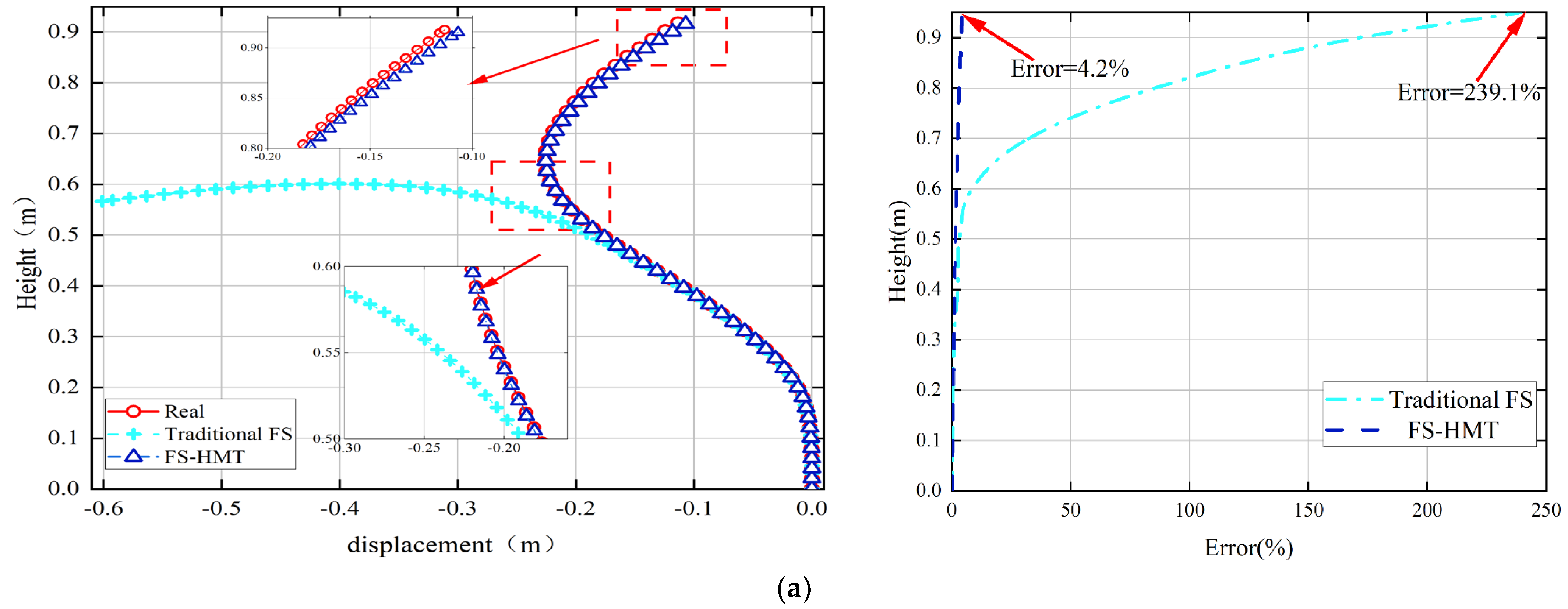
- The shape restoration algorithm based on the FS framework exhibits a tendency to abruptly alter the normal vector at inflection points, particularly when the bending direction of the curve changes. This behavior leads to significant reconstruction errors after such inflection points.
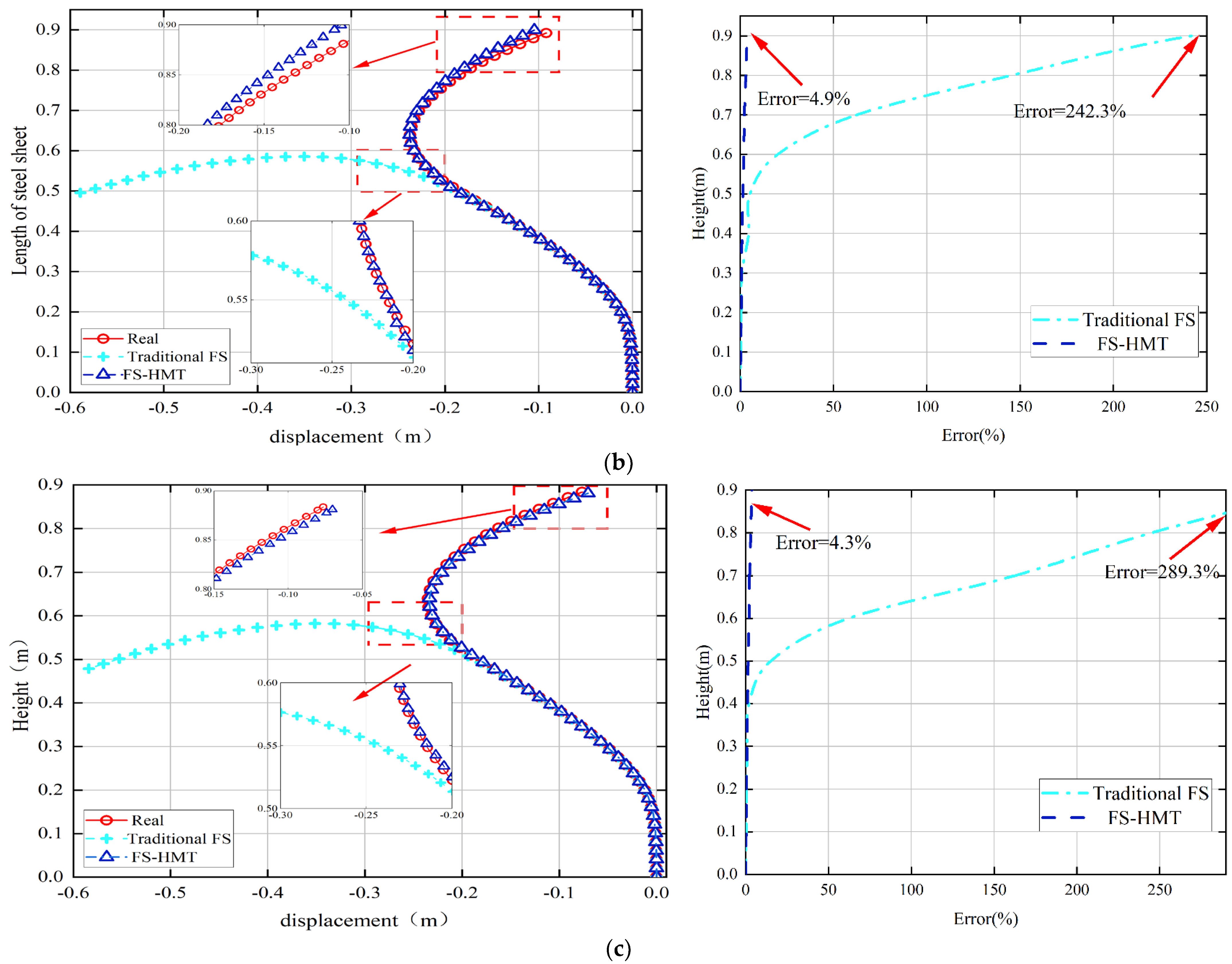
- The shape reconstruction algorithm, grounded in the FS framework, relies on knowledge of the position information of the preceding point. Subsequently, utilizing data collected by sensors, it recursively determines the coordinates of subsequent points to achieve the overall structure’s curve reconstruction. However, this approach introduces error accumulation, resulting in a substantial error towards the end of the reconstruction process.
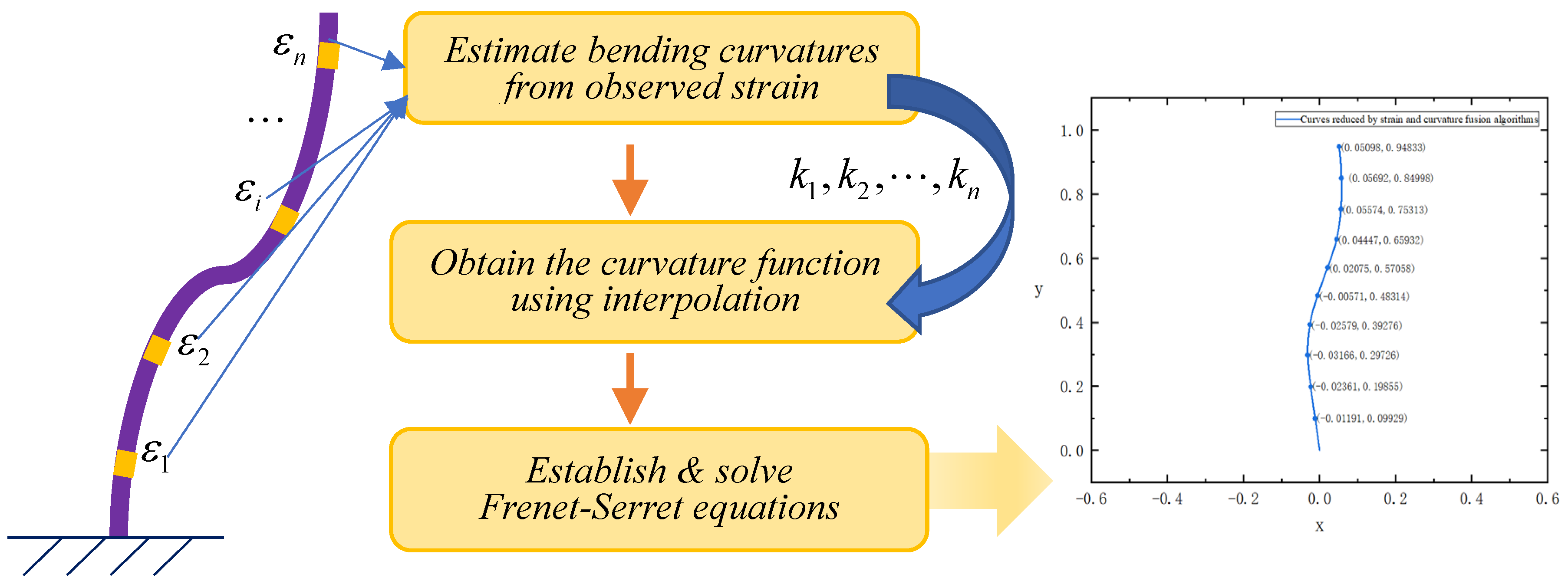
2. Frenet–Serret Framework-Based Shape-Sensing Algorithm
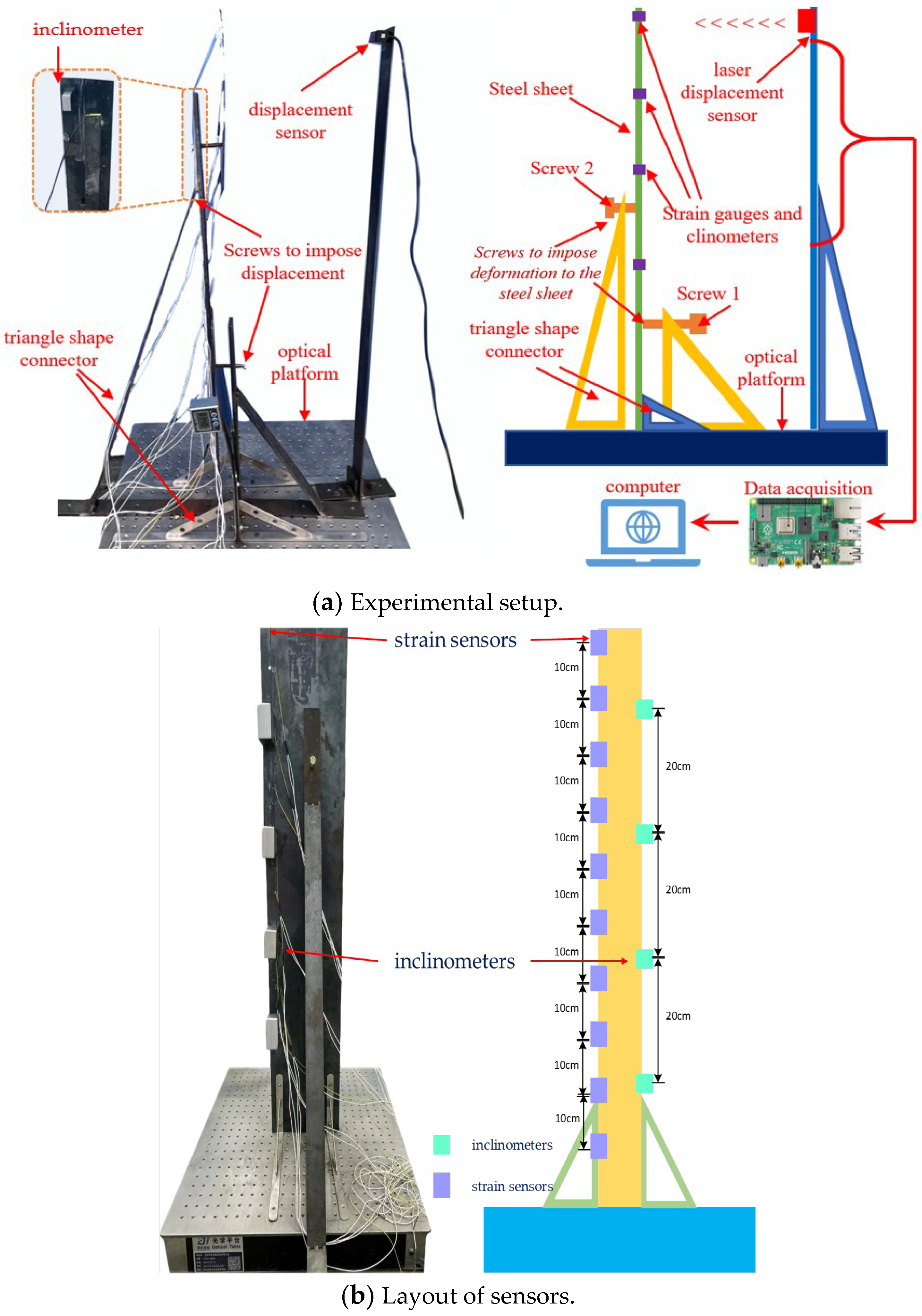
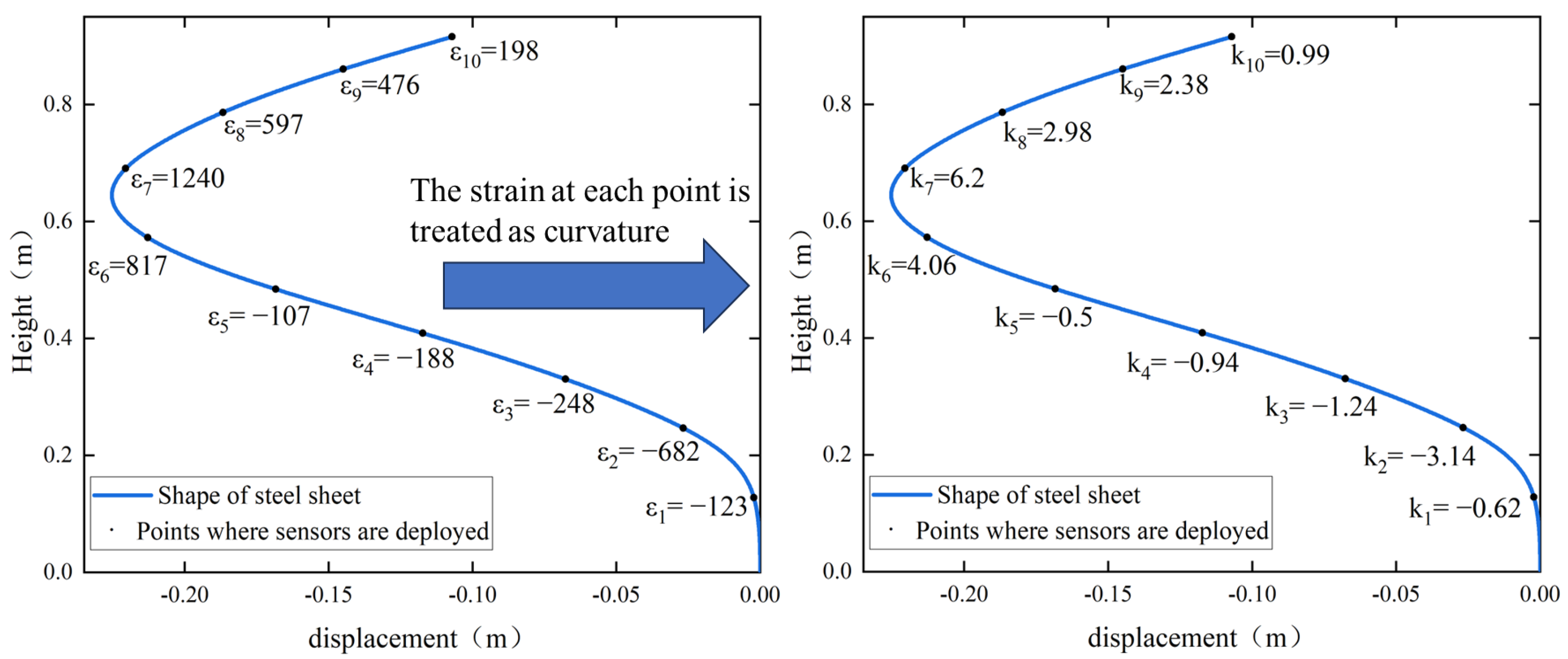
- Install strain sensors to measure the strain at several points of the structure and calculate the curvature;
- Obtain the bending curvature function using the cubic spline interpolation method;
- Substitute the curvature into the FS framework to obtain the set of differential equations, and then solve the differential equations to obtain the position information of each point.
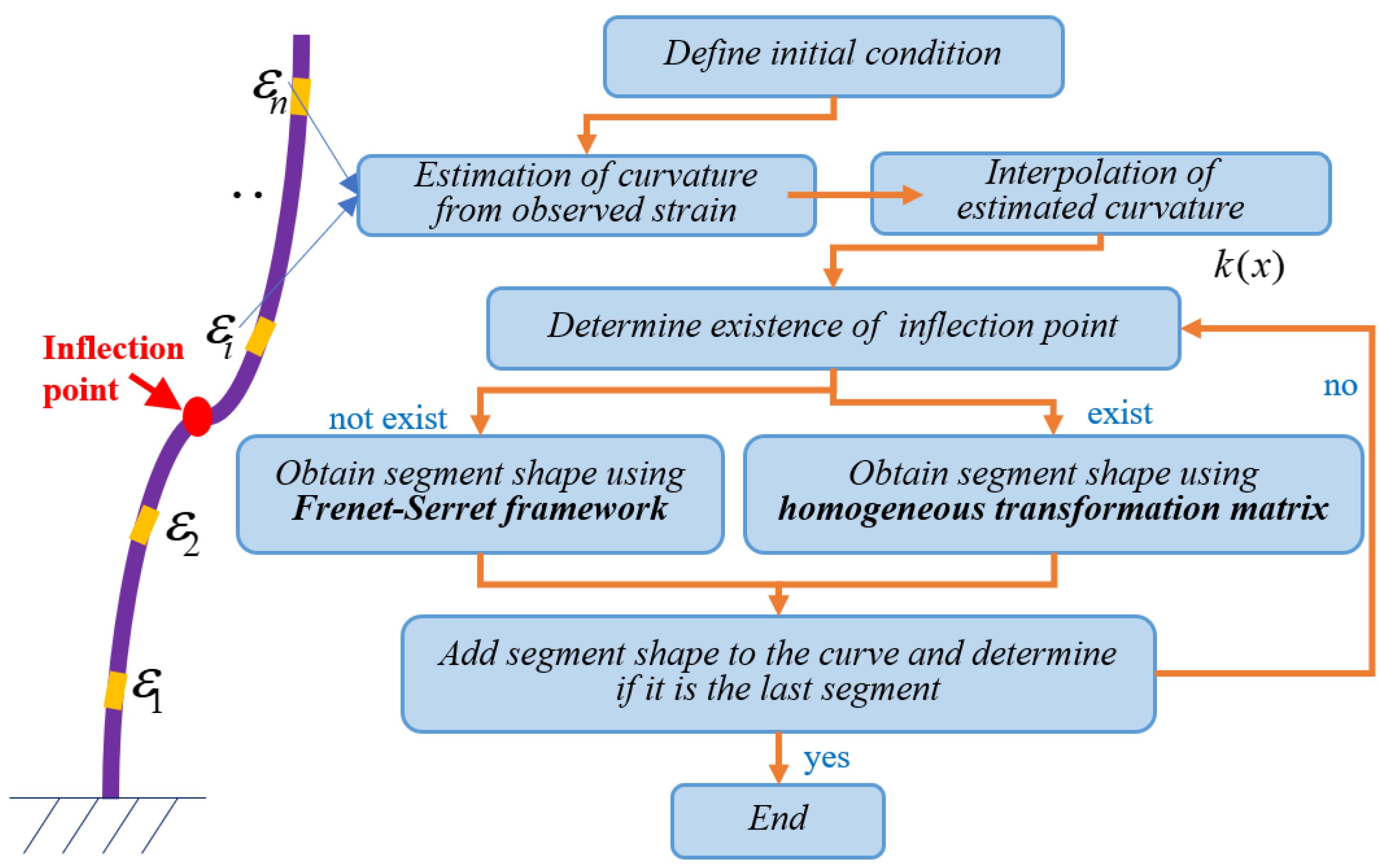
3. Modified FS Framework Based on Strain and Inclination Data
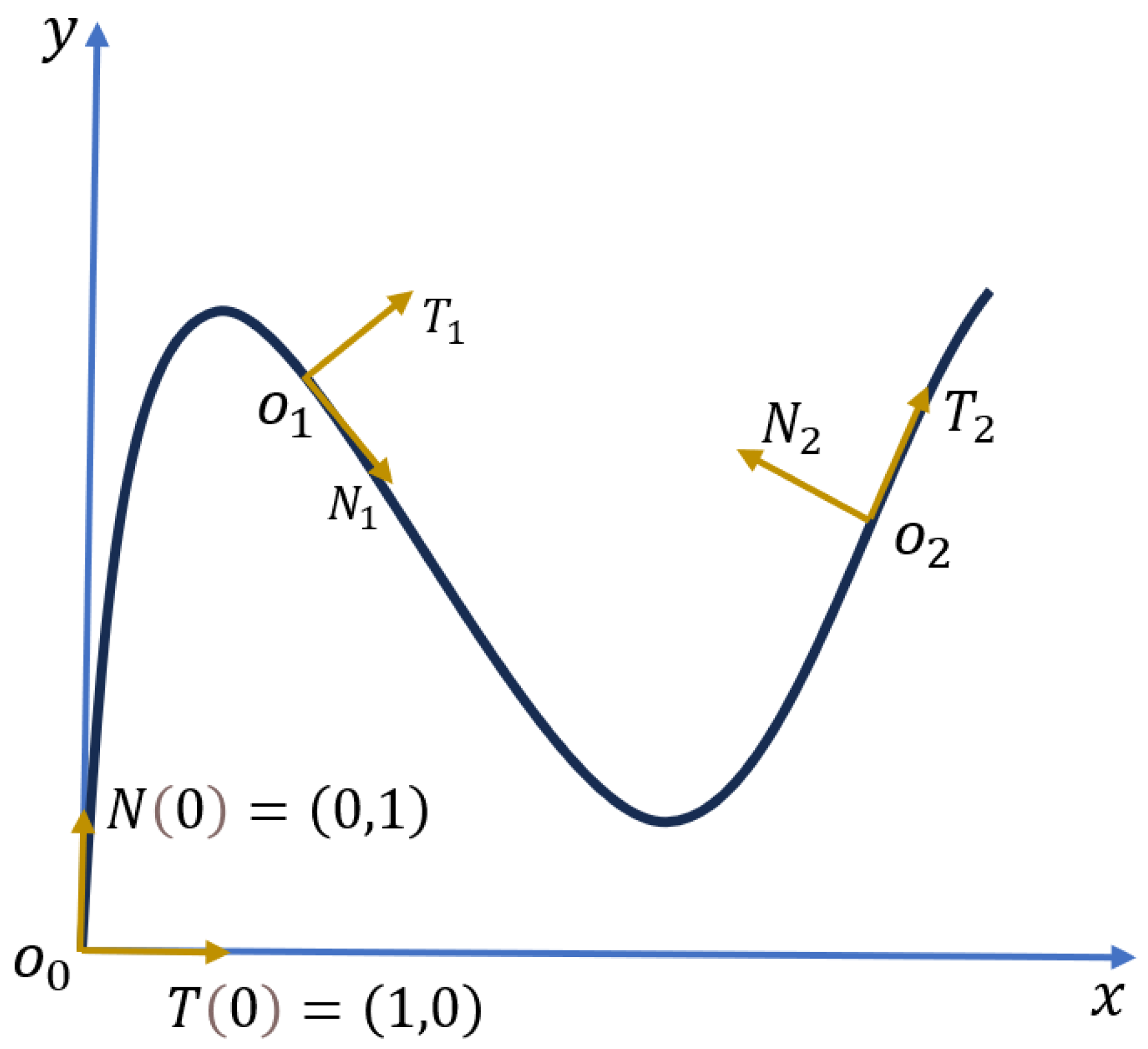
- Define an initial condition of r(0) = (0,0), T(0) = (1,0), and N(0) = (0,1).
- Divide the curve into several segments using the strain gauges.
- Measure the strain at each point with a strain gauge, and then calculate the curvature function using Equation (5). This step uses the same interpolation method as presented in Section 2.
- Determine if an inflection point exists within the segment. Then, perform shape sensing on the segment using either the traditional FS framework or the homogeneous transformation matrix.
- Calculate the T and N of the start point of each segment using inclination data and then obtain the whole shape of the curve.
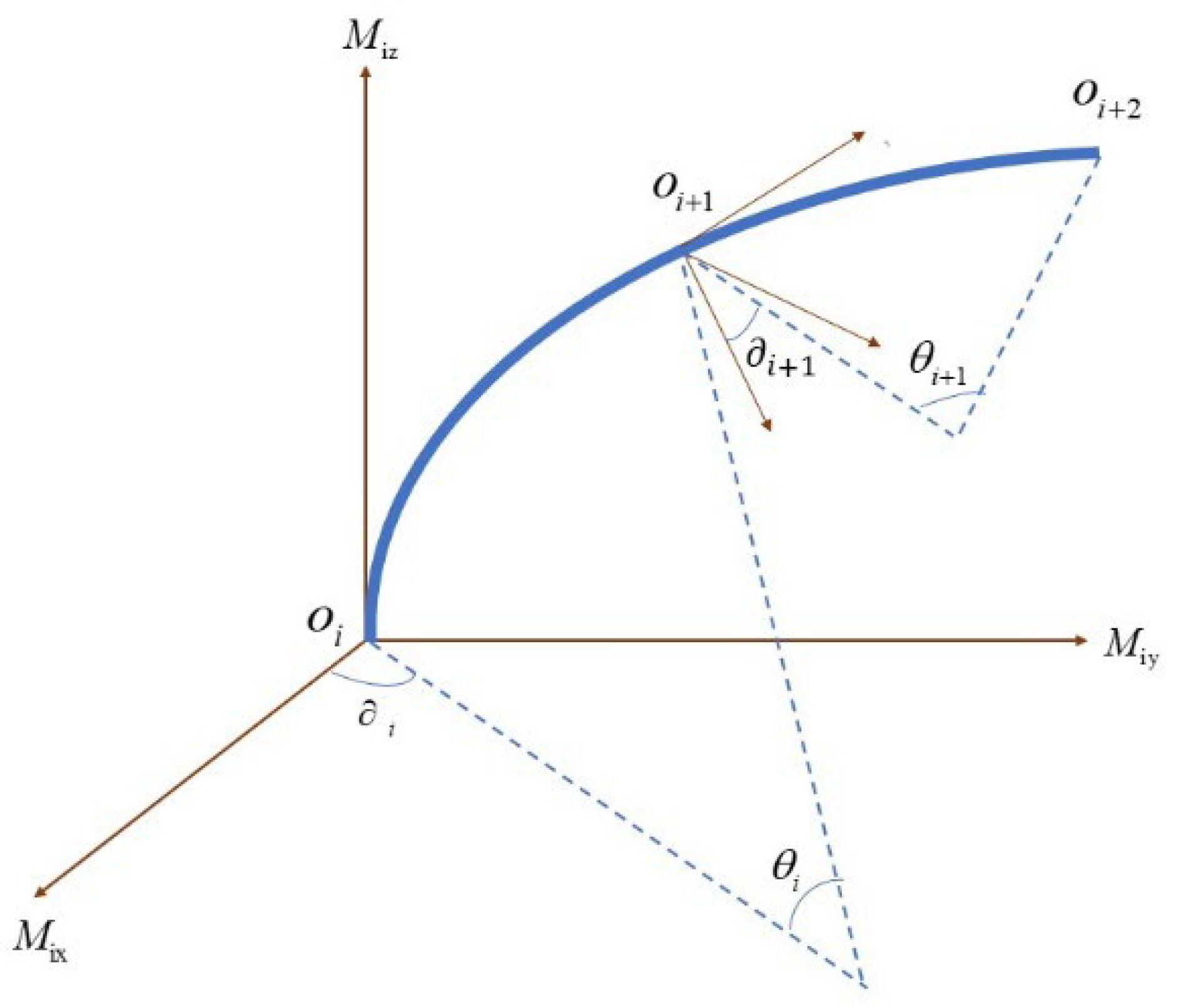
3.1. Shape Sensing with Homogenous Transformation Matrix
3.2. Calculate T, N Using Inclination
4. Numerical Verification
5. Experimental Verification
5.1. Experimental Design
5.2. Data Processing
5.3. Experimental Results
6. Conclusions
- Compared with the traditional FS framework, the proposed FS-HMT method utilizes the homogenous transformation matrix to reconstruct the shape of the segment with inflection points and utilizes inclination information to calculate the T and N of the starting point of a segment.
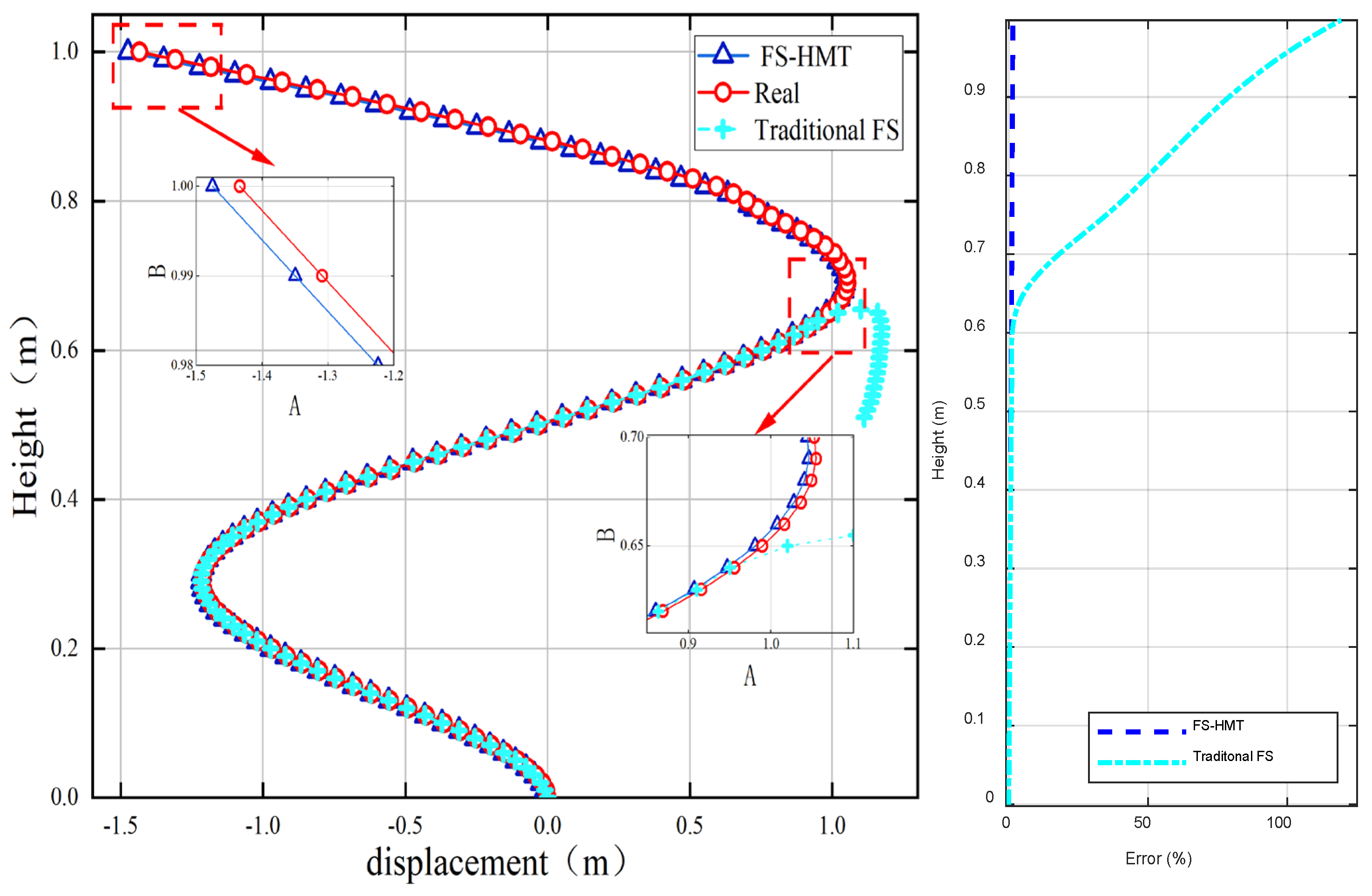
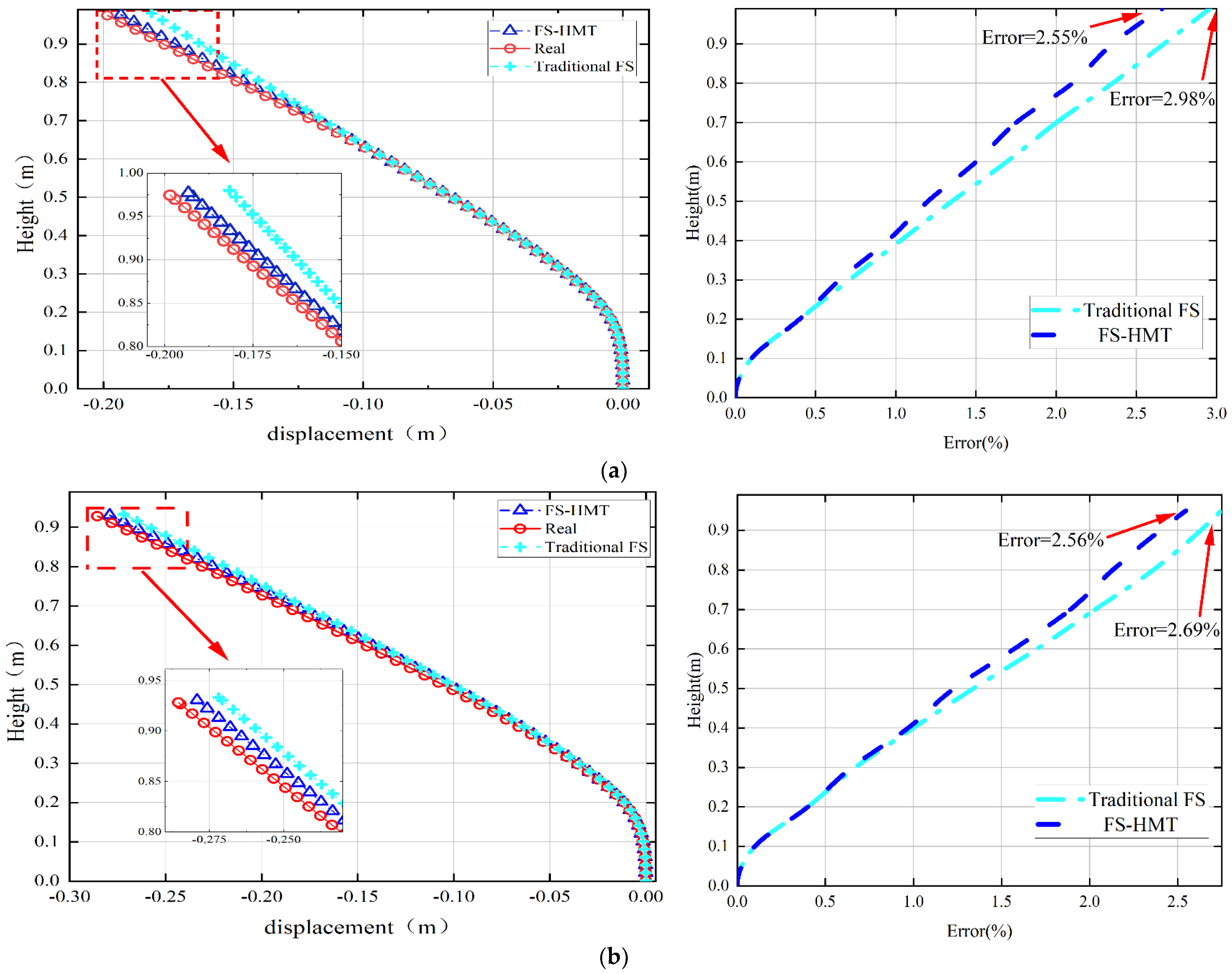
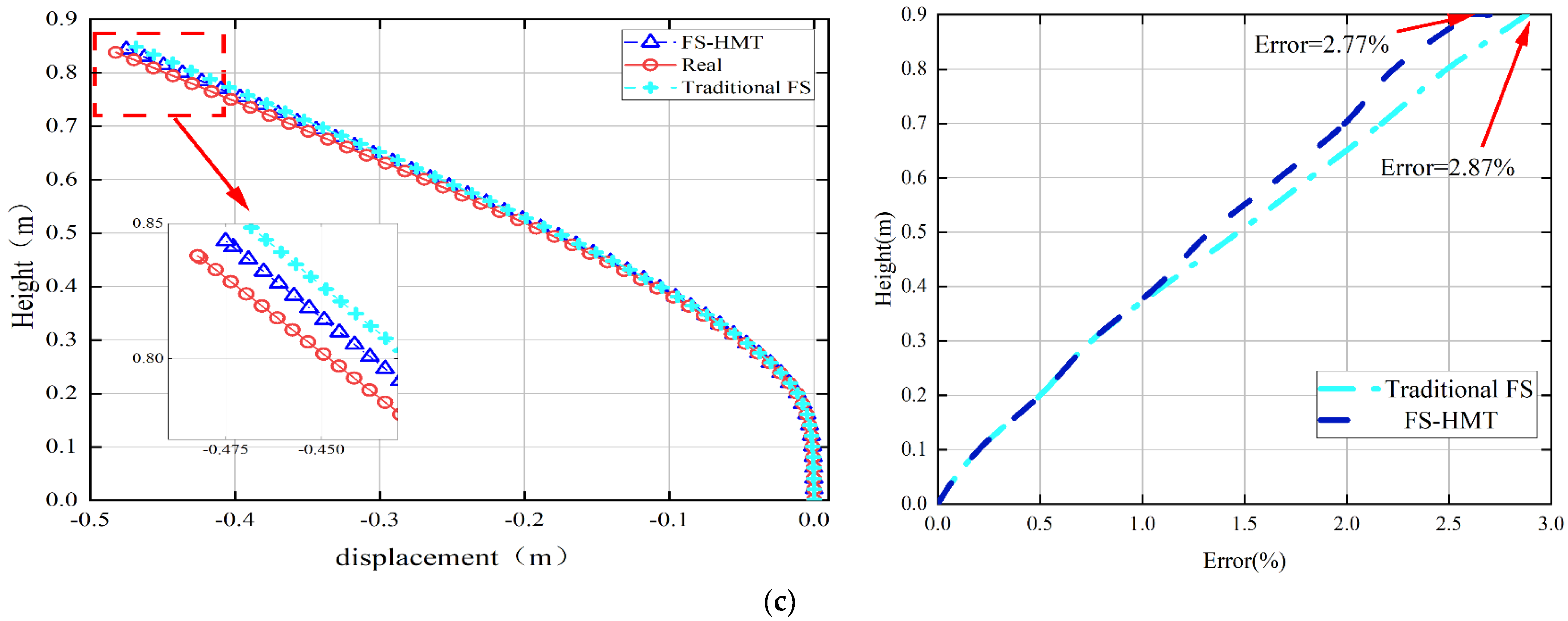
- Regarding the curves without an inflection point, both the FS-HMT and the traditional FS framework can accurately reconstruct the deformed shape of the structure. The FS-HMT method slightly improved the accuracy compared with the traditional FS framework.
- Regarding the curves with an inflection point, the traditional FS framework failed due to accumulative error after the inflection point, while the FS-HMT framework demonstrated satisfying accuracy, with a maximum error of only 4.9%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Farrar, C.R.; Worden, K. An Introduction to structural health monitoring. Phys. Eng. Sci. 2007, 36, 303–315. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Nayak, S. Structural health monitoring: State of the art and perspectives. JOM 2012, 64, 789–792. [Google Scholar] [CrossRef]
- Glaser, R.; Caccese, V. Shape monitoring of a beam structure from measured strain or curvature. Exp. Mech. 2012, 52, 591–606. [Google Scholar] [CrossRef]
- Derkevorkian, A.; Masri, S.F. Strain-based deformation shape-estimation algorithm for control and monitoring applications. AIAA J. 2013, 51, 2231–2240. [Google Scholar] [CrossRef]
- Pantelopoulos, A.; Bourbakis, N.G. A survey on wearable sensor-based systems for health monitoring and prognosis. IEEE Trans. Syst. Man Cybern. 2009, 40, 1–12. [Google Scholar] [CrossRef]
- Liu, F.; Chen, Z. Video image target monitoring based on RNN-LSTM. Multimed. Tools Appl. 2019, 78, 4527–4544. [Google Scholar] [CrossRef]
- Gherlone, M.; Cerracchio, P. Shape sensing of 3D frame structures using an inverse finite element method. Int. J. Solids Struct. 2012, 49, 3100–3112. [Google Scholar] [CrossRef]
- Adrian, S.; Bahram, J. Three-dimensional image sensing and reconstruction with time-division multiplexed computational integral imaging. Appl. Opt. 2003, 42, 7036–7042. [Google Scholar]
- Soter, G.; Hauser, H. Shape reconstruction of CCD camera-based soft tactile sensors. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24–29 October 2020. [Google Scholar]
- Ko, W.L.; Richards, W.L. Applications of ko Displacement Theory to the Deformed Shape Predictions of the Doubly-Tapered Ikhana Wing; NASA/TP-2009-214652; NASA: Washington, DC, USA, 2009. [Google Scholar]
- Kefal, A.; Yildiz, M. Modeling of sensor placement strategy for shape sensing and structural health monitoring of a wing-shaped sandwich panel using inverse finite element method. Sensors 2017, 17, 2775. [Google Scholar] [CrossRef]
- Kefal, A.; Mayang, J.B. Three dimensional shape and stress monitoring of bulk carriers based on iFEM methodology. Ocean Eng. 2018, 147, 256–267. [Google Scholar] [CrossRef]
- Tessler, A.; Spangler, J.L. A least-squares variational method for full-field reconstruction of elastic deformations in shear-deformable plates and shells. Comput. Methods Appl. Mech. Eng. 2005, 194, 327–339. [Google Scholar] [CrossRef]
- Jiang, T.; Zhu, J. Shape Reconstruction of a Timoshenko Beam under the Geometric Nonlinearity Condition. J. Eng. Mech. 2023, 149, 04023031. [Google Scholar] [CrossRef]
- Davis, M.A.; Kersey, A.D.; Friebele, E.J. Shape and vibration mode sensing using a fiber optic Bragg grating array. Smart Mater Struct 1996, 5, 759. [Google Scholar] [CrossRef]
- Bogert, P.B.; Haugse, E.D. Structural shape identification from experimental strains using a modal transformation technique. In Proceedings of the Structural Dynamics and Materials Conference, Norfolk, VA, USA, 7–10 April 2003. [Google Scholar]
- Xin, W.; Wang, L.J. Research on OFDR 3D shape reconstruction algorithm based on Frenet-Serret framework. Opt. Instrum. 2023, 45, 62–68. [Google Scholar]
- Yi, X.H.; Chen, X.Y. Separation method of bending and torsion in shape sensing based on FBG sensors array. Opt. Express 2020, 28, 9367–9383. [Google Scholar] [CrossRef] [PubMed]
- Paloschi, D.; Bronnikov, K.A. 3D shape sensing with multicore optical fibers: Transformation matrices versus Frenet-Serret equa-tions for real-time application. IEEE Sens. J. 2020, 21, 4599–4609. [Google Scholar] [CrossRef]
- Zhang, H.; Zhu, X. Fiber Bragg grating plate structure shape reconstruction algorithm based on orthogonal curve net. J. Intell. Mater. Syst. Struct. 2016, 27, 2416–2425. [Google Scholar] [CrossRef]
- Hirsh, S.M.; Ichinaga, S.M. Structured time-delay models for dynamical systems with connections to Frenet–Serret frame. Proc. R. Soc. A 2021, 477, 20210097. [Google Scholar] [CrossRef] [PubMed]
- Kim, K.R.; Kim, P.T. Frenet-Serret and the estimation of curvature and torsion. IEEE J. Sel. Top. Signal Process. 2012, 7, 646–654. [Google Scholar] [CrossRef]
- Xu, R.; Yurkewich, A. Curvature, torsion, and force sensing in continuum robots using helically wrapped FBG sensors. IEEE Robot. Autom. Lett. 2016, 1, 1052–1059. [Google Scholar] [CrossRef]
- Amanzadeh, M.; Aminossadati, S.M. Recent developments in fibre optic shape sensing. Measurement 2018, 128, 119–137. [Google Scholar] [CrossRef]
- Moore, J.P.; Rogge, M.D. Shape sensing using multi-core fiber optic cable and parametric curve solutions. Opt. Express 2012, 20, 2967–2973. [Google Scholar] [CrossRef]
- Wu, H.F.; Liang, L. Design and Measurement of a Dual FBG High-Precision Shape Sensor for Wing Shape Reconstruction. Sensor 2022, 22, 268. [Google Scholar] [CrossRef] [PubMed]
- Al-Ahmad, O.; Ourak, M. Improved FBG based shape sensing methods for vascular catheterization. IEEE Robot. Autom. Lett. 2020, 5, 4683–4694. [Google Scholar] [CrossRef]
- He, C.J.; He, Y.L. Optical fiber shape sensing of flexible medical instruments with temperature compensation. Opt. Fiber Technol. 2022, 74, 103123. [Google Scholar] [CrossRef]
- Tian, Y.; Dang, H. Structure shape measurement method based on an optical fiber shape sensor. Meas. Sci. Technol. 2023, 34, 085102. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, M. An orthogonal calibration method for the multi-core fiber shape sensor. In Proceedings of the 2021 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 27–31 December 2021. [Google Scholar]
- Zhu, Z.; Xin, W. Electrical Impedance Tomographic Shape Sensing for Soft Robots. IEEE Robot. Autom. Lett. 2023, 8, 1555–1562. [Google Scholar]
- Liu, M.; Cai, Z. Efficient sensor placement optimization for shape deformation sensing of antenna structures with fiber Bragg grating strain sensors. Sensors 2018, 18, 2481. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Li, D.; An, R.; Devendra, P. Shape Sensing of Cantilever Column Using Hybrid Frenet–Serret Homogeneous Transformation Matrix Method. Sensors 2024, 24, 2533. https://doi.org/10.3390/s24082533
Zhang P, Li D, An R, Devendra P. Shape Sensing of Cantilever Column Using Hybrid Frenet–Serret Homogeneous Transformation Matrix Method. Sensors. 2024; 24(8):2533. https://doi.org/10.3390/s24082533
Chicago/Turabian StyleZhang, Peng, Duanshu Li, Ran An, and Patil Devendra. 2024. "Shape Sensing of Cantilever Column Using Hybrid Frenet–Serret Homogeneous Transformation Matrix Method" Sensors 24, no. 8: 2533. https://doi.org/10.3390/s24082533
APA StyleZhang, P., Li, D., An, R., & Devendra, P. (2024). Shape Sensing of Cantilever Column Using Hybrid Frenet–Serret Homogeneous Transformation Matrix Method. Sensors, 24(8), 2533. https://doi.org/10.3390/s24082533