
Development and Application of a High-Precision Portable Digital Compass System for Improving Combined Navigation Performance

Abstract
1. Introduction
2. Design of High-Precision Portable Digital Compass System
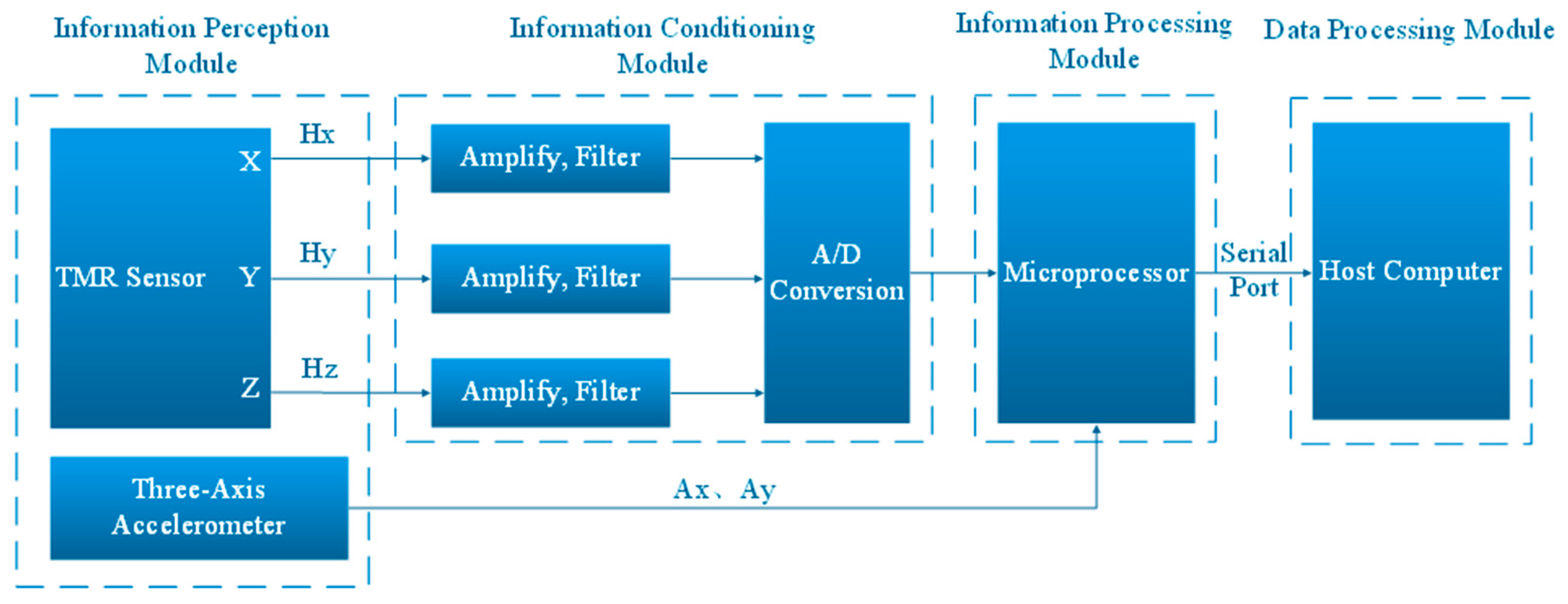
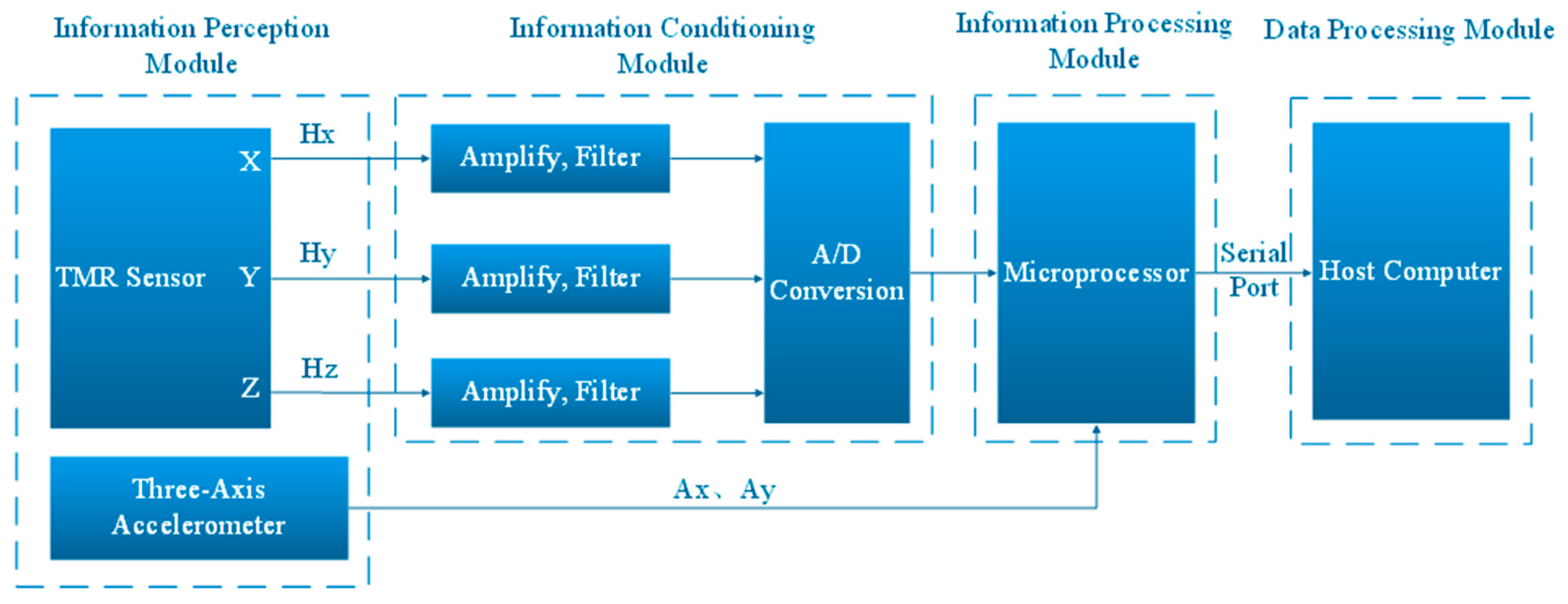
2.1. Design of Overall System Plan
2.2. Hardware Design
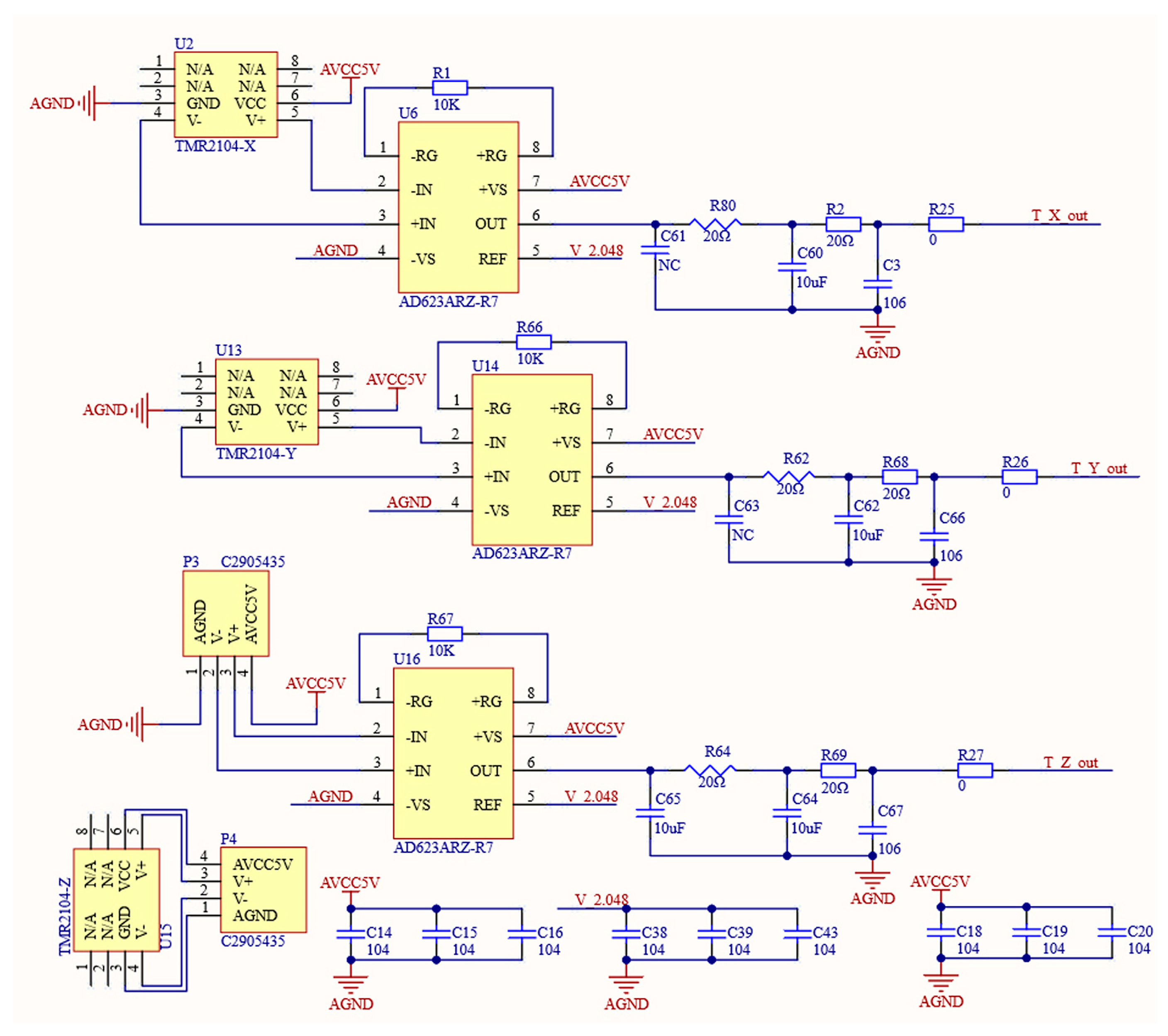
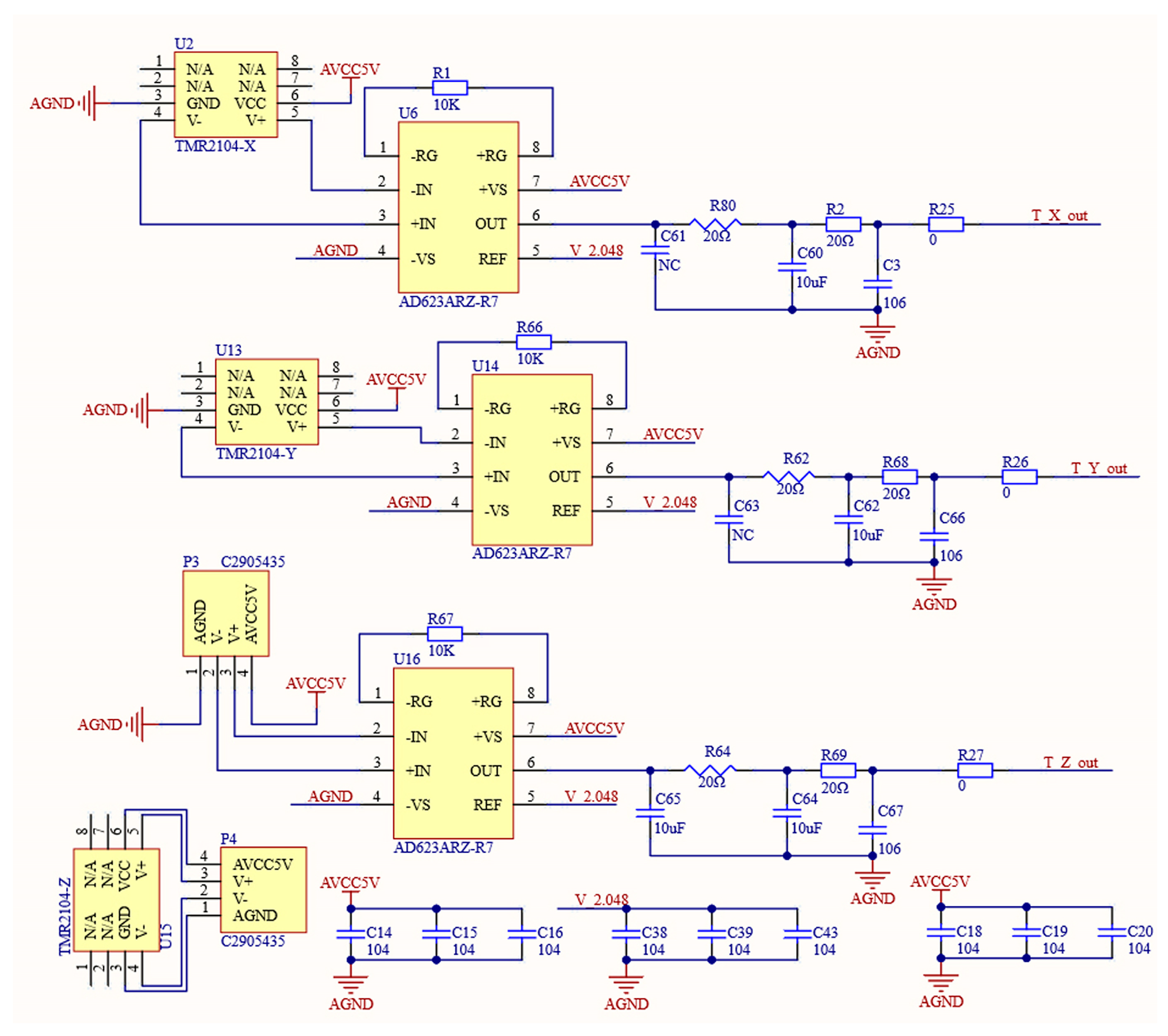
2.2.1. Information Sensing and Conditioning Circuit for Magnetic Fields
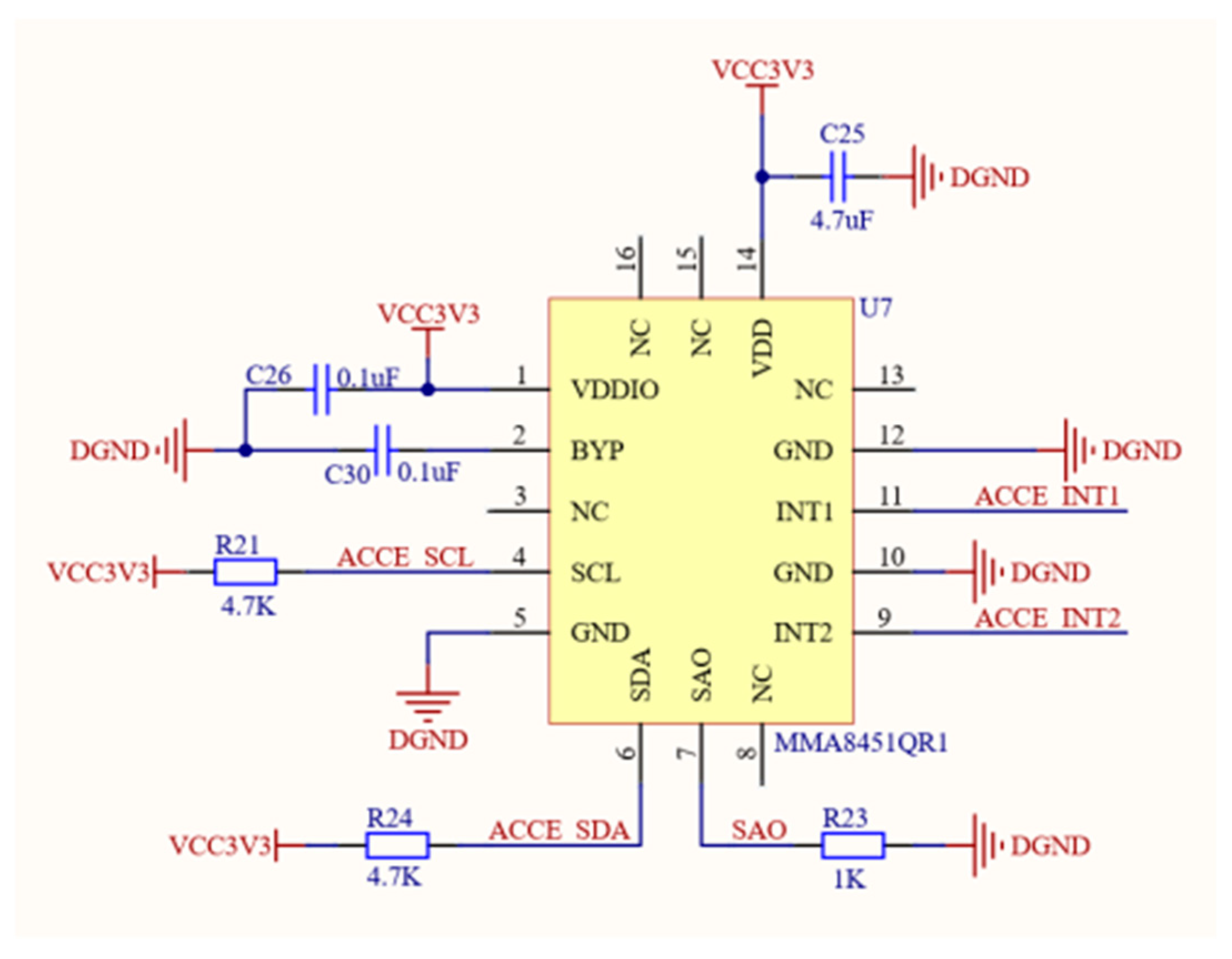
2.2.2. Circuit for Acceleration Information Sensing
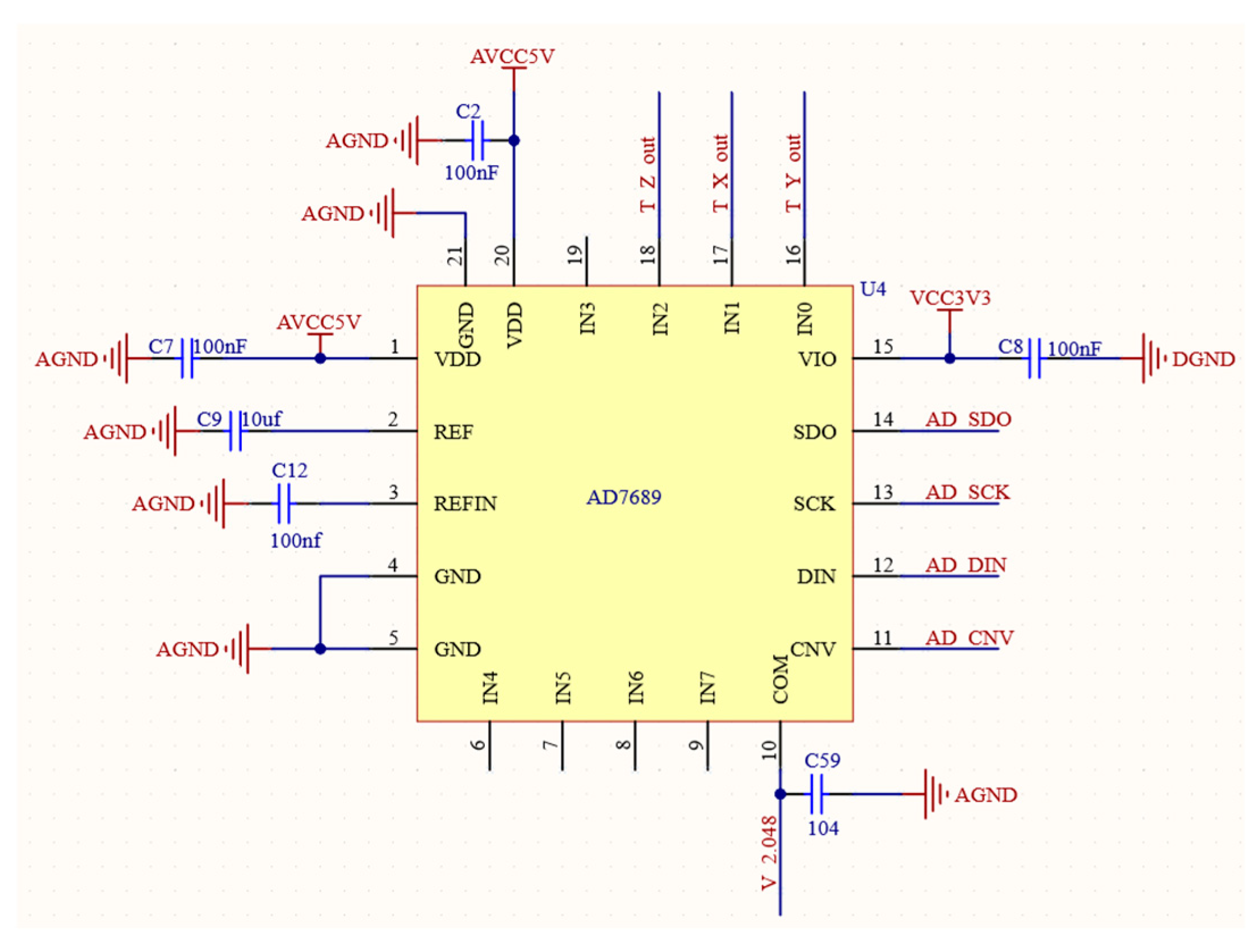
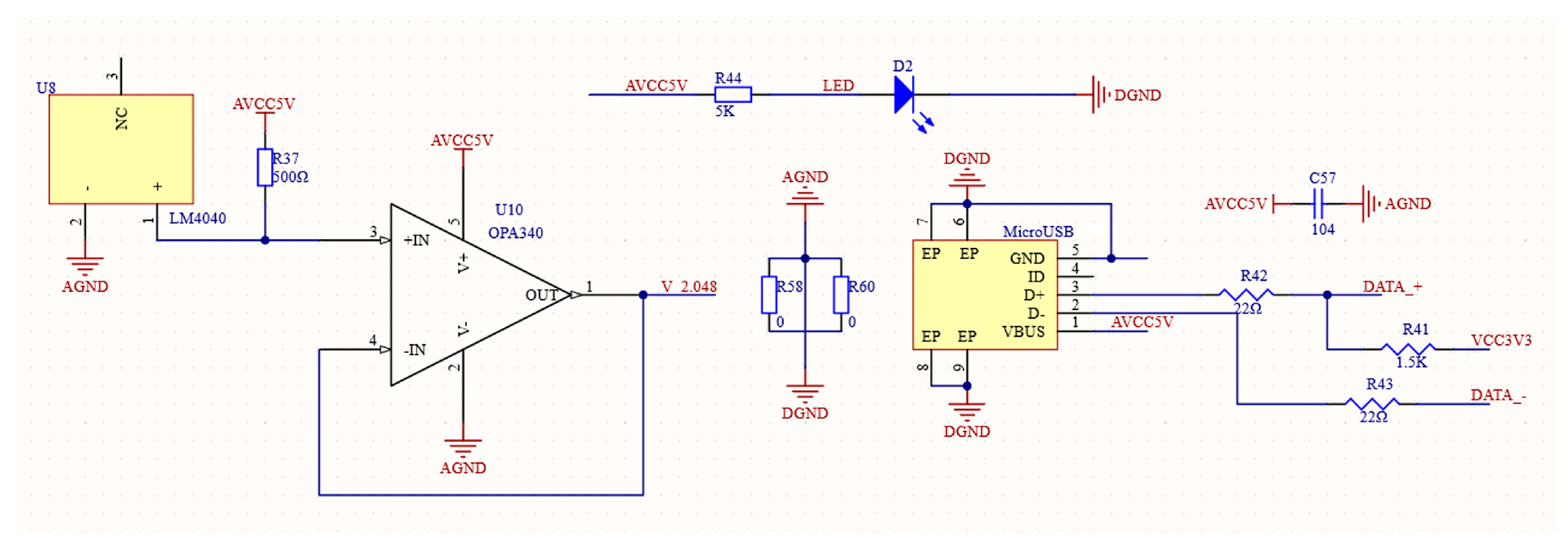
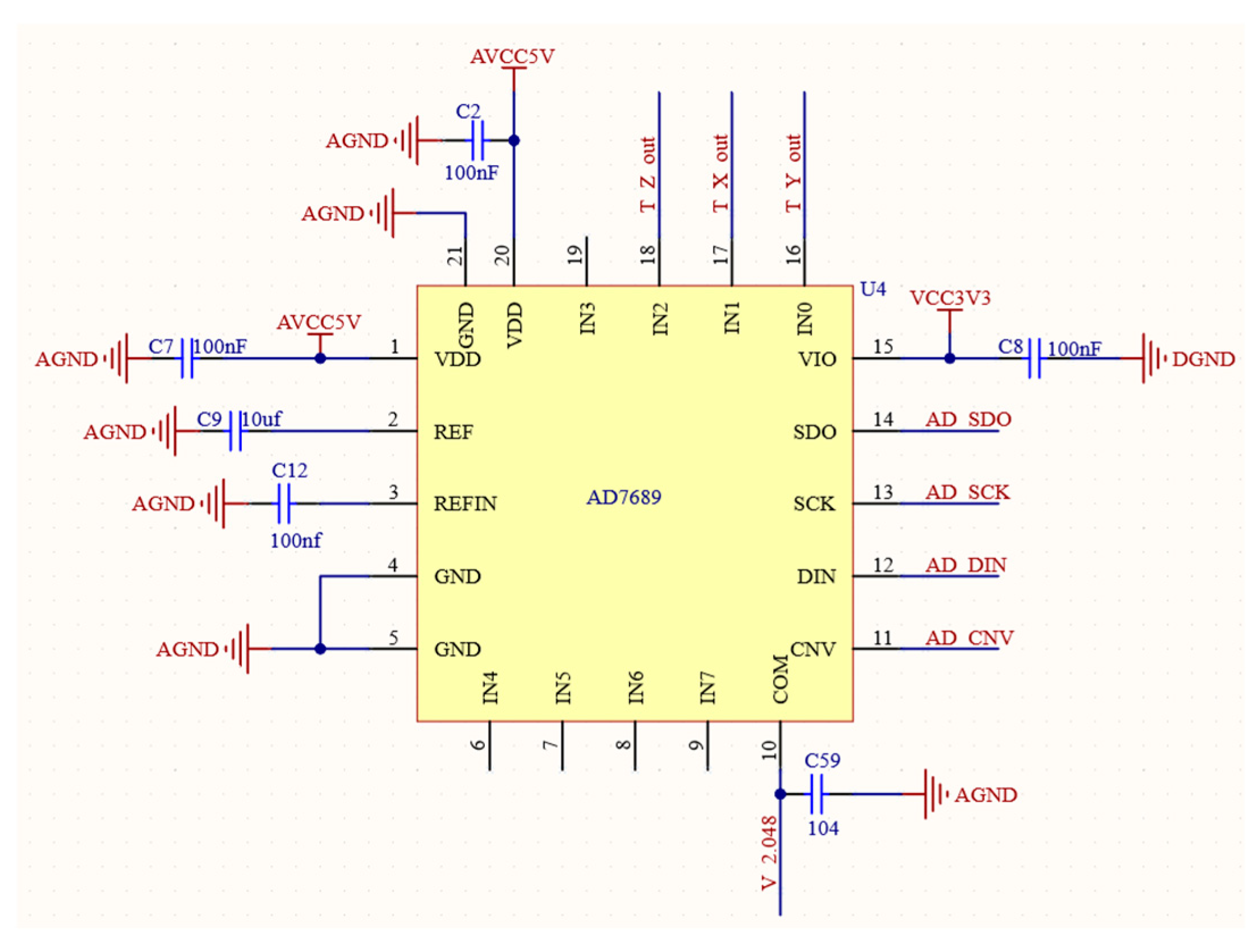
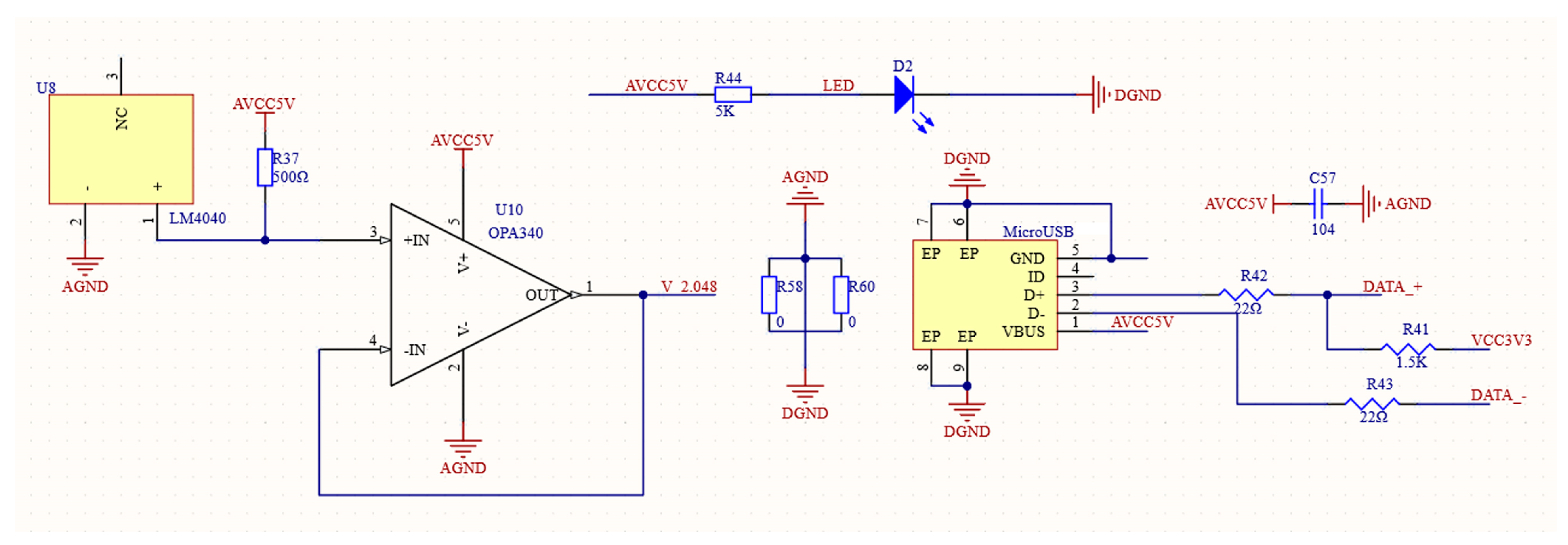
2.2.3. Circuit for Analog-to-Digital Conversion
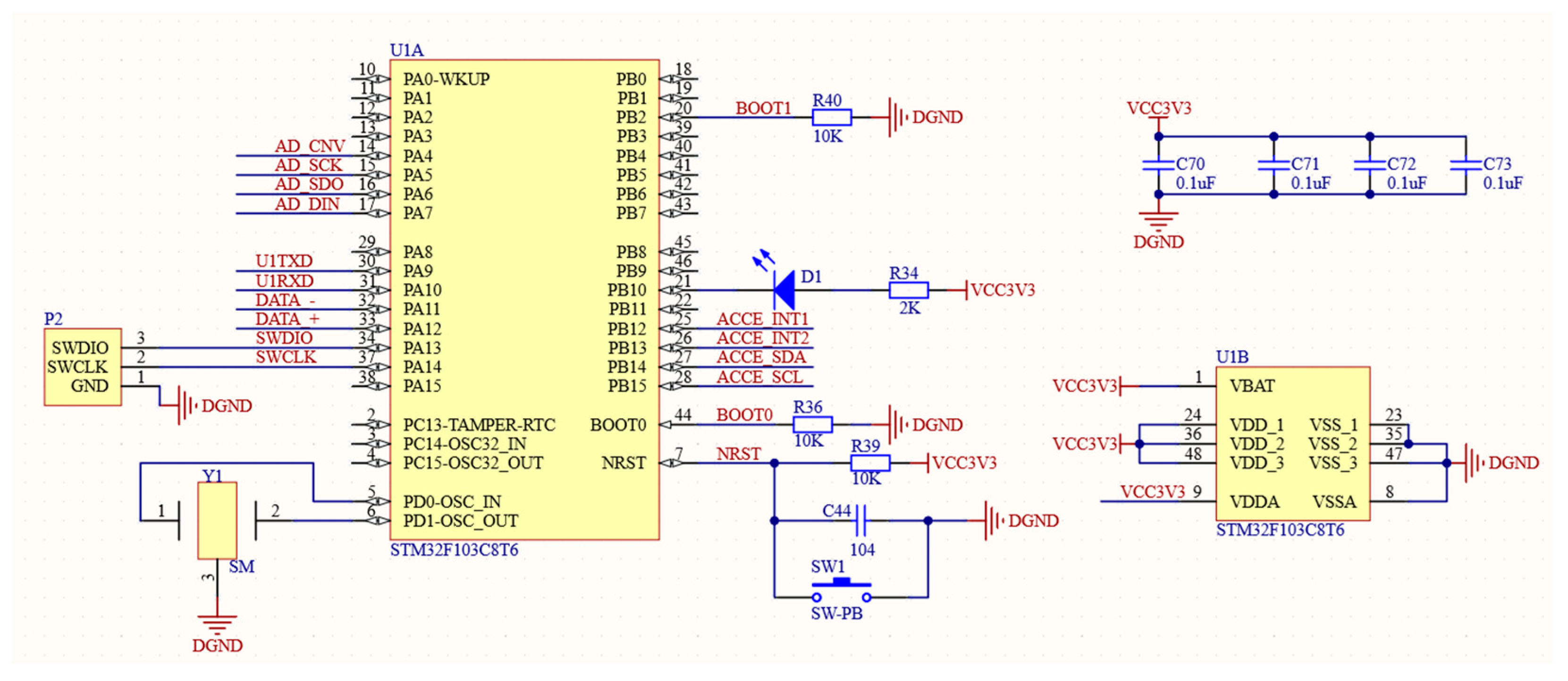
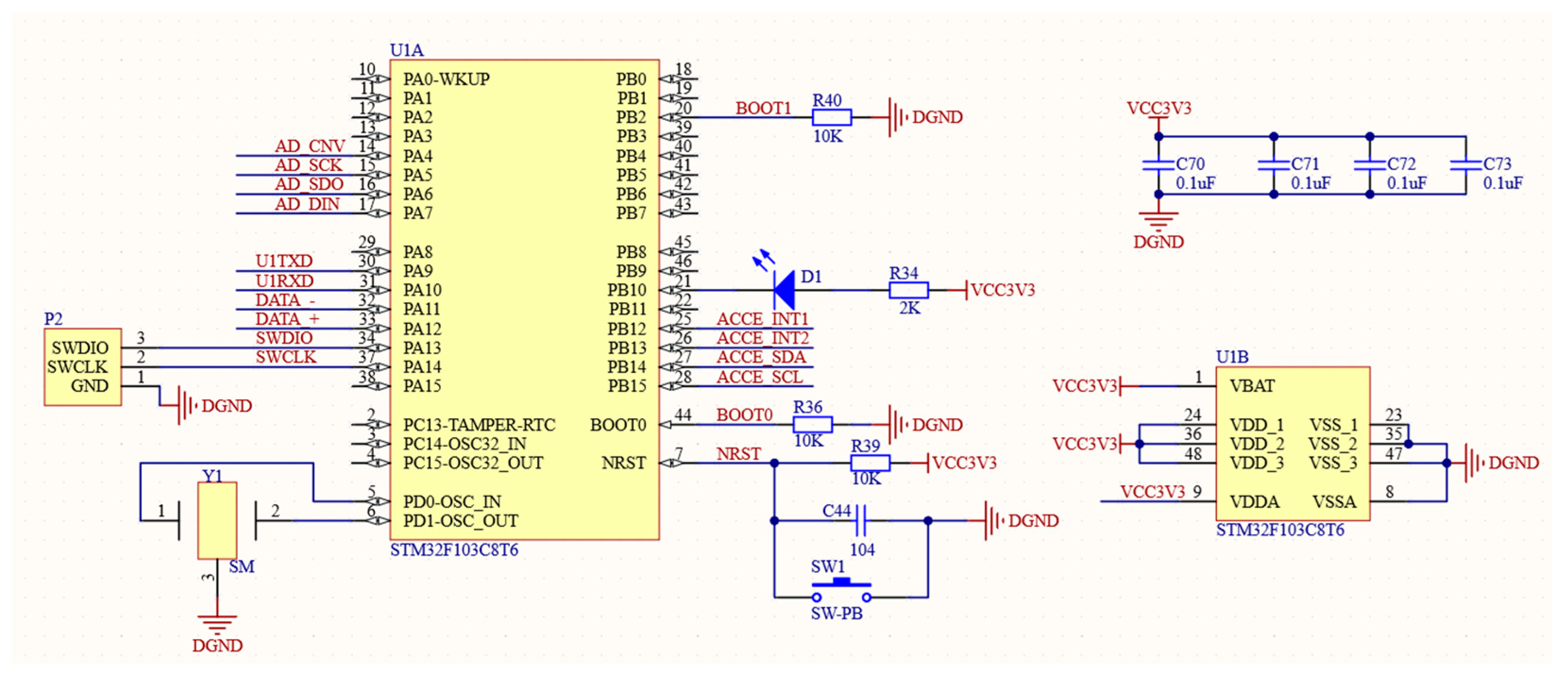
2.2.4. Circuit for Information Processing
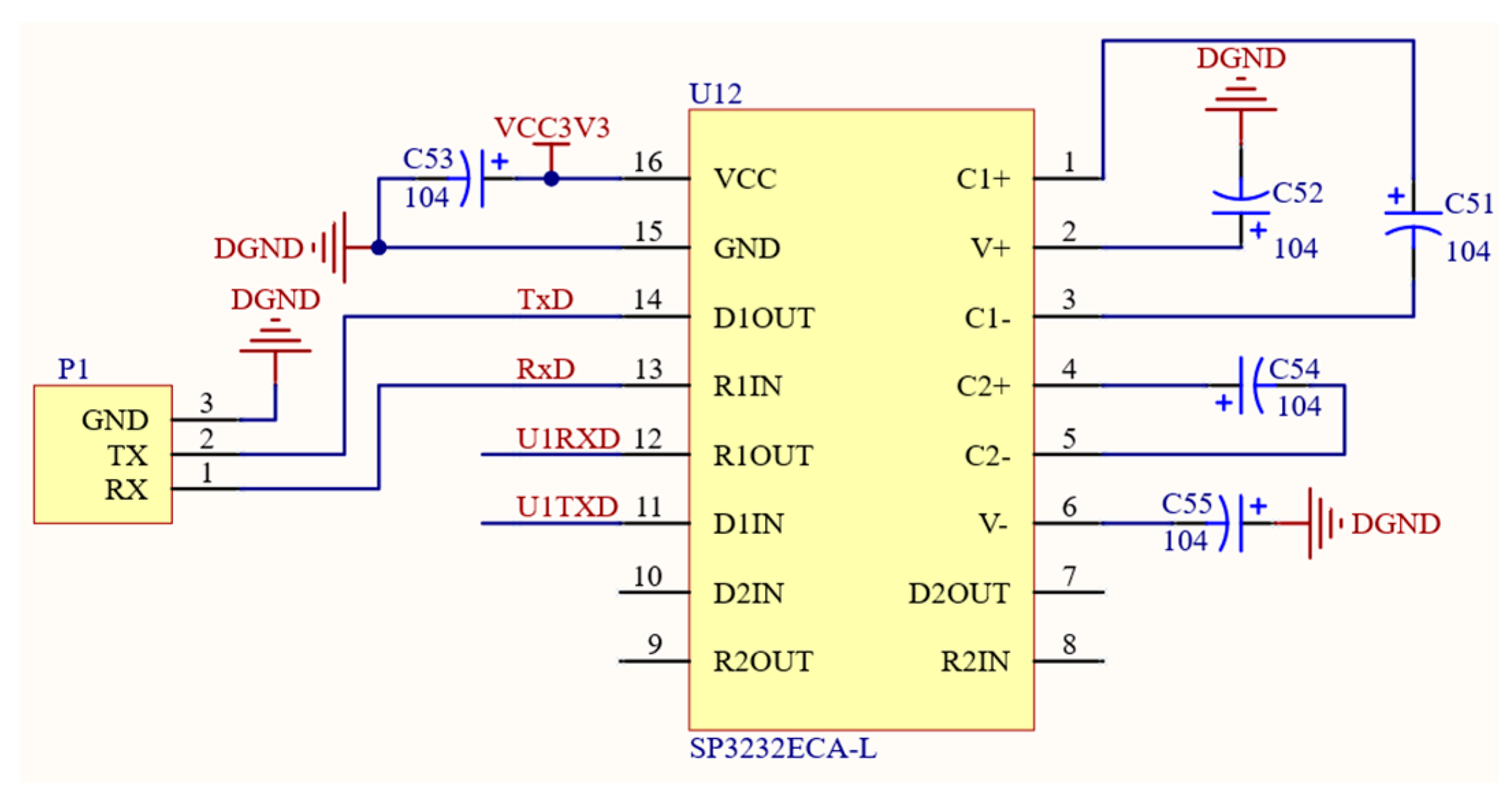
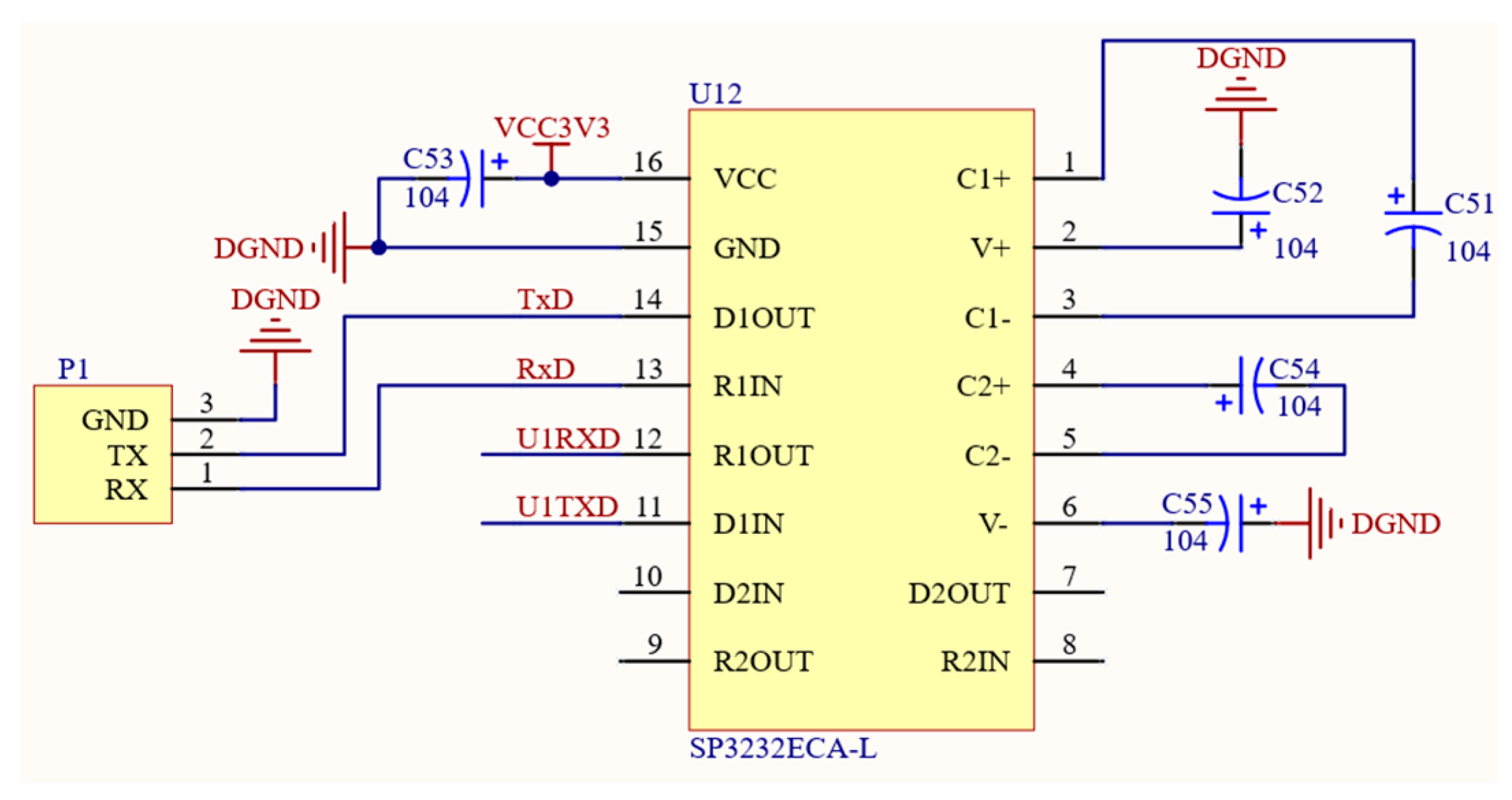
2.2.5. Circuit for Serial Communication
2.2.6. Electrical Power Circuit
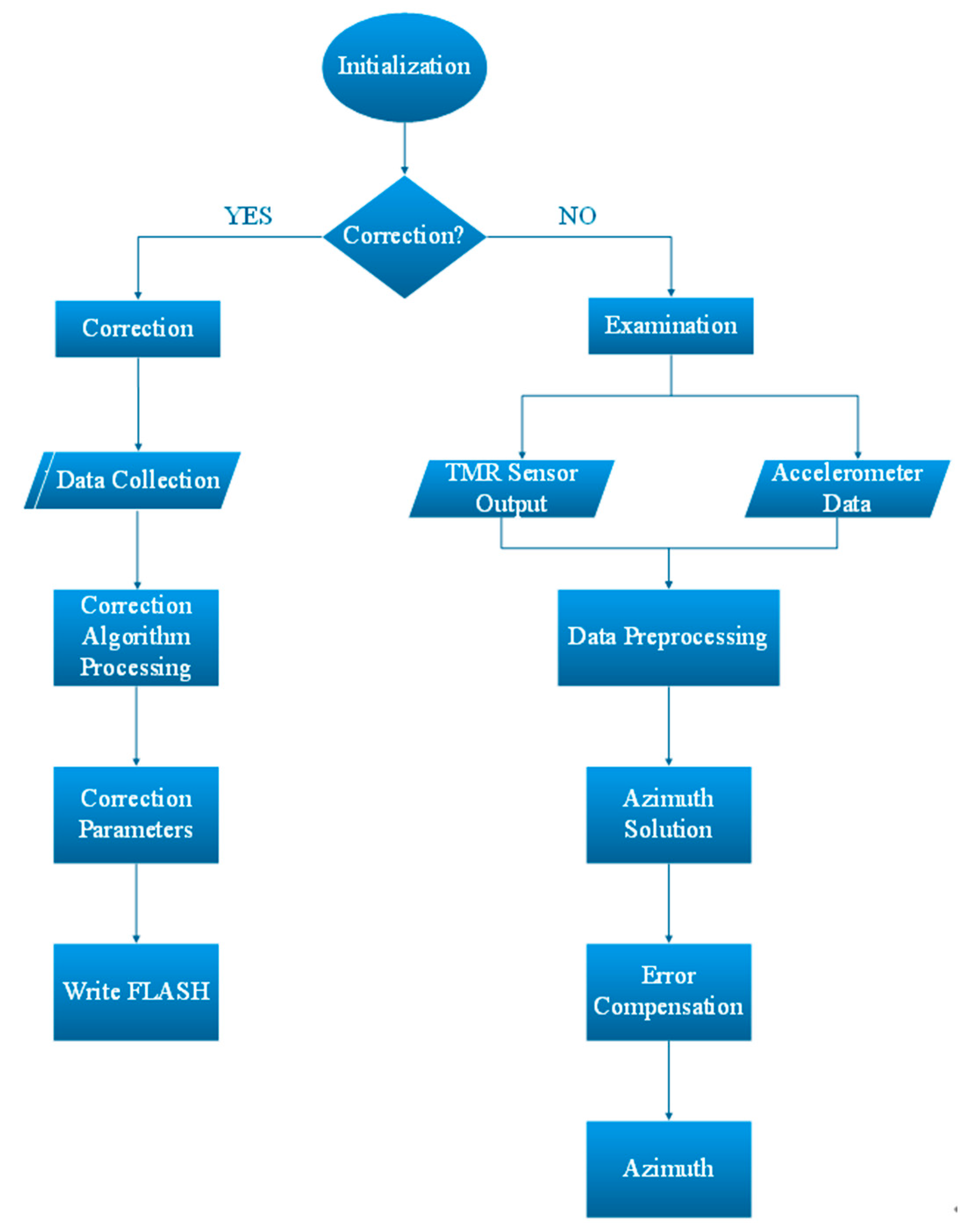
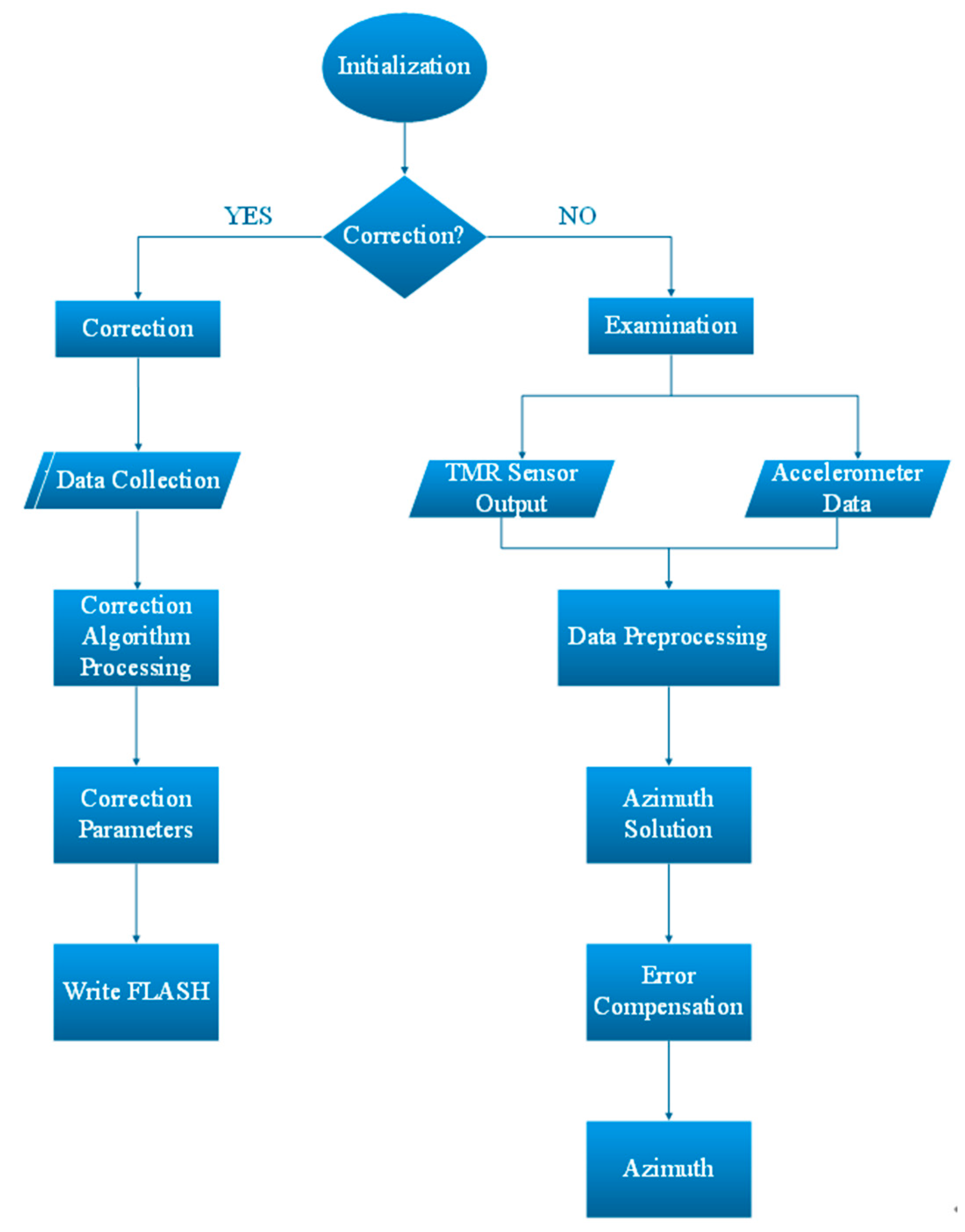
2.3. Software Design
2.3.1. Module of Initialization
2.3.2. Module for Collecting Data
2.3.3. Module for Data Calibration
2.3.4. Module for Serial Communication
2.3.5. Module for Calculating Attitude Angle
2.3.6. Module for Real-Time Data Display and Storage
2.4. Construction of Error Compensation Algorithm
2.4.1. Building the Compass Error Model
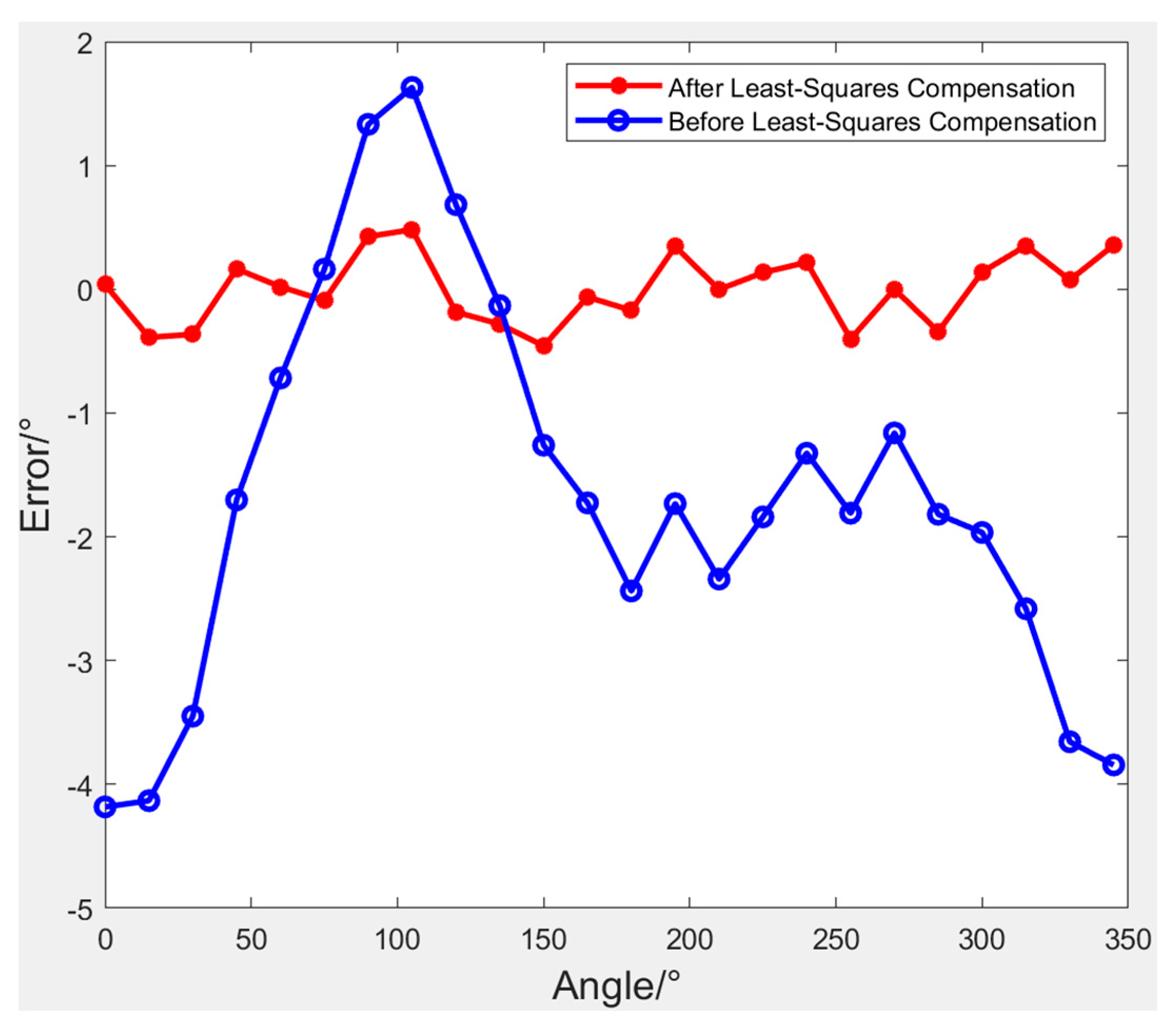
2.4.2. Process of the Least-Squares Algorithm
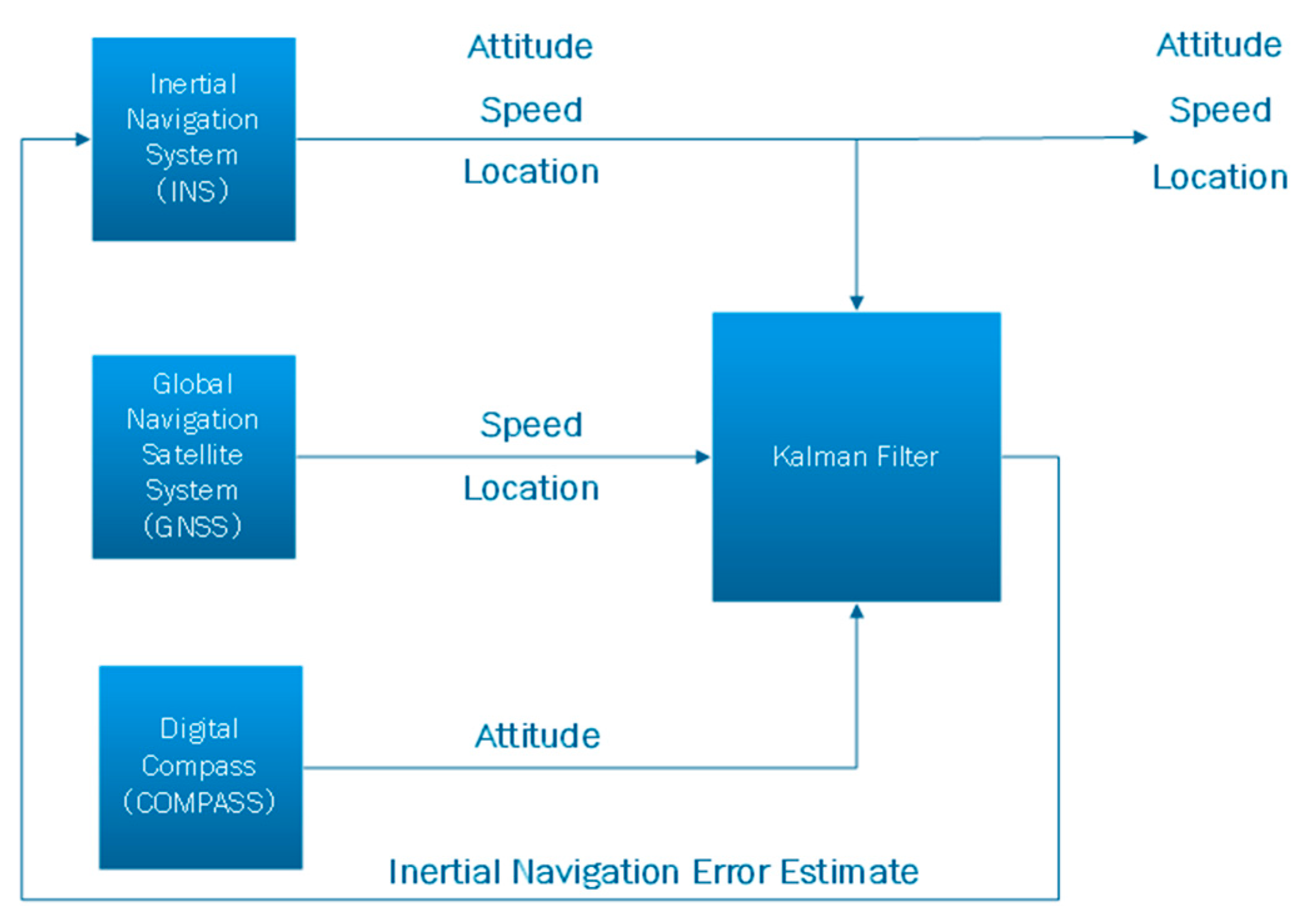
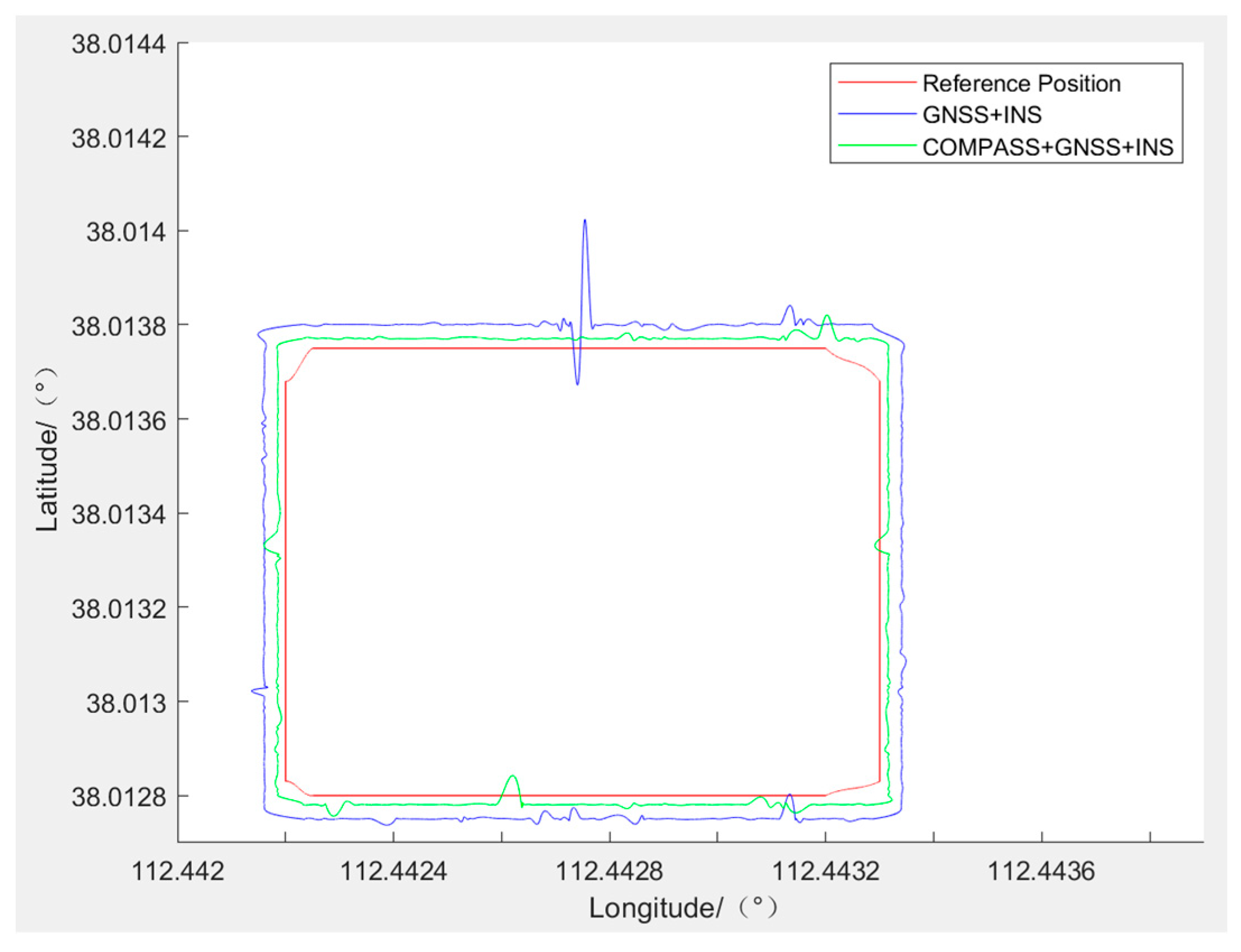
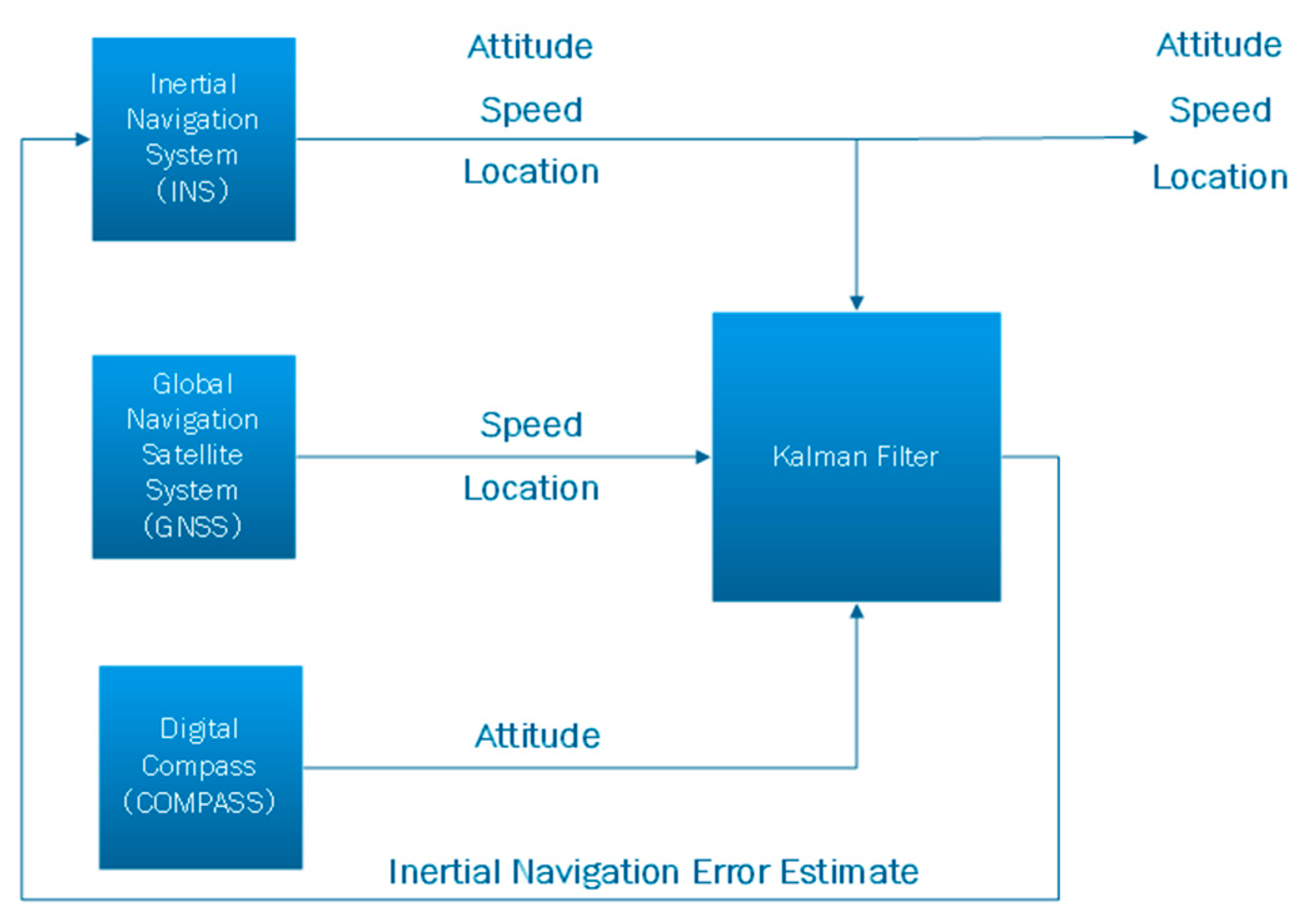
2.4.3. The Combined Navigation Principle (GNSS/INS + COMPASS)
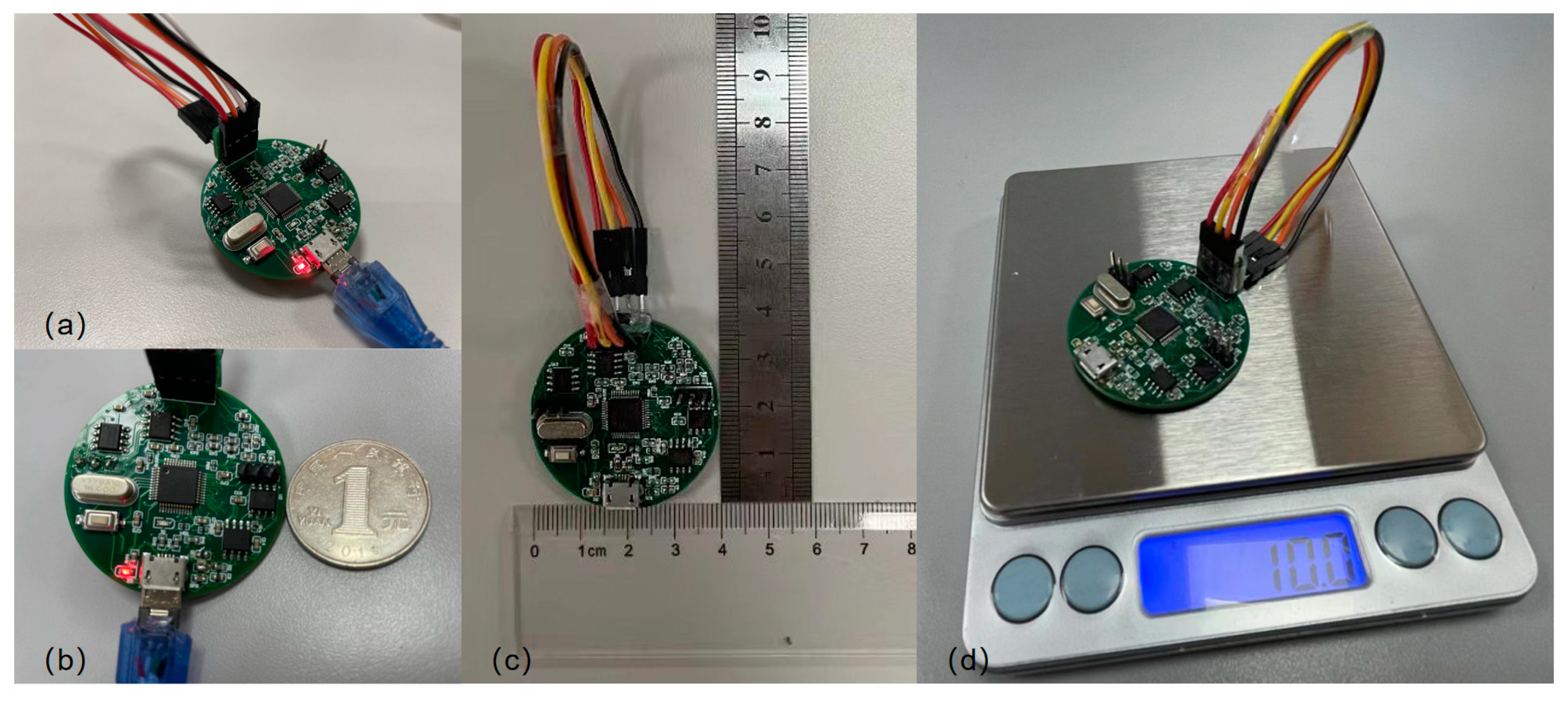
3. Experimental Platform Construction
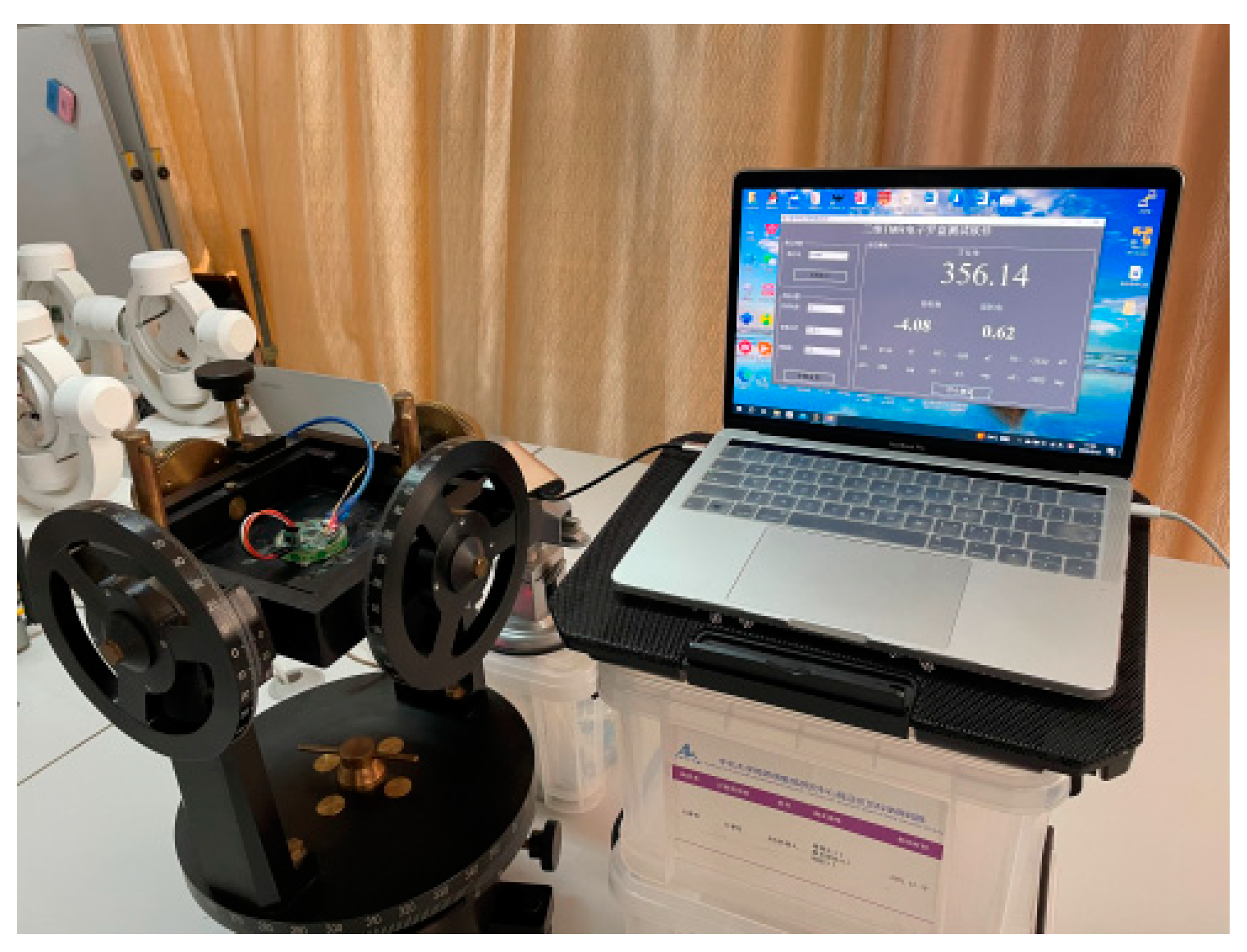
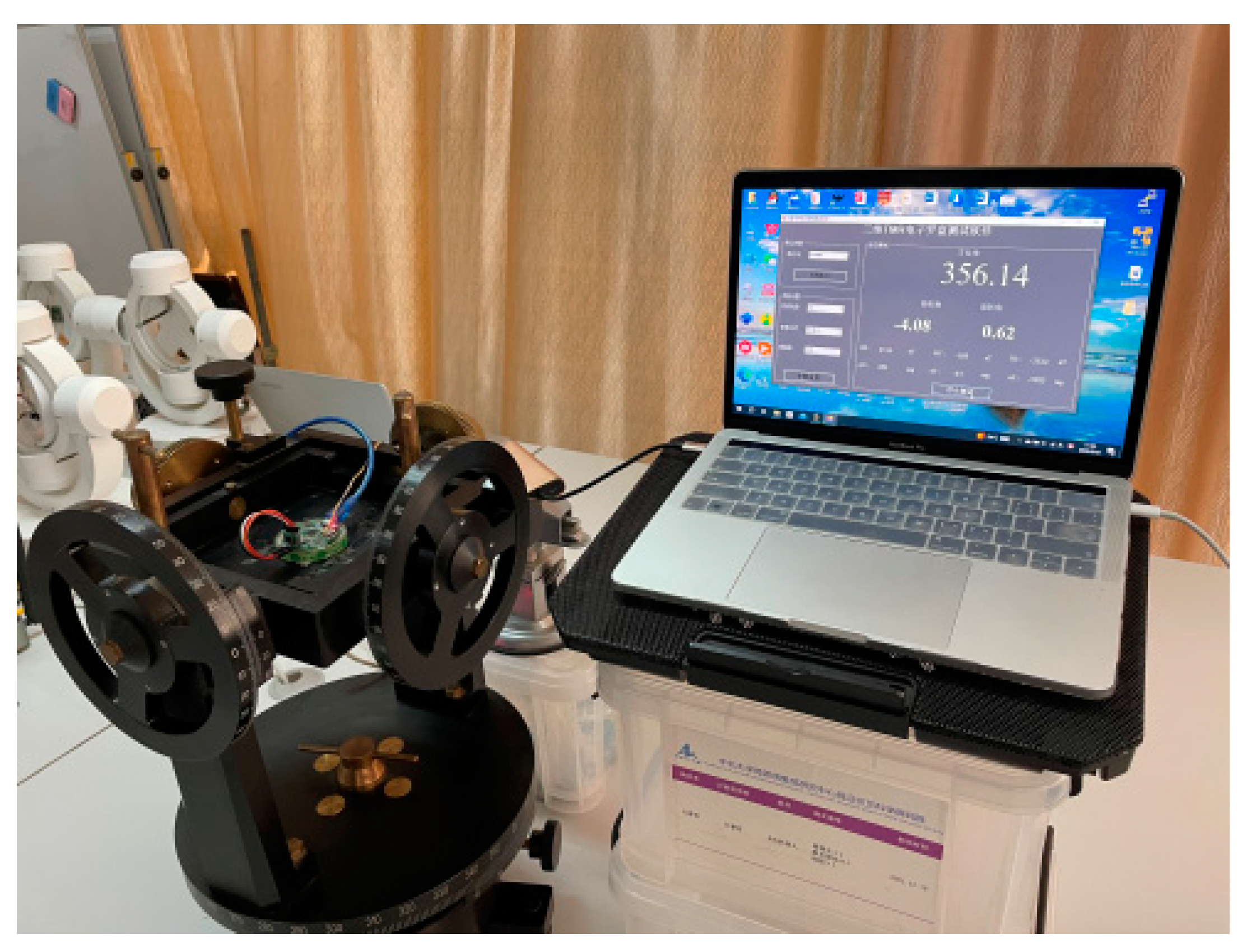
3.1. Construction of High-Precision Portable TMR Digital Compass Test Platform
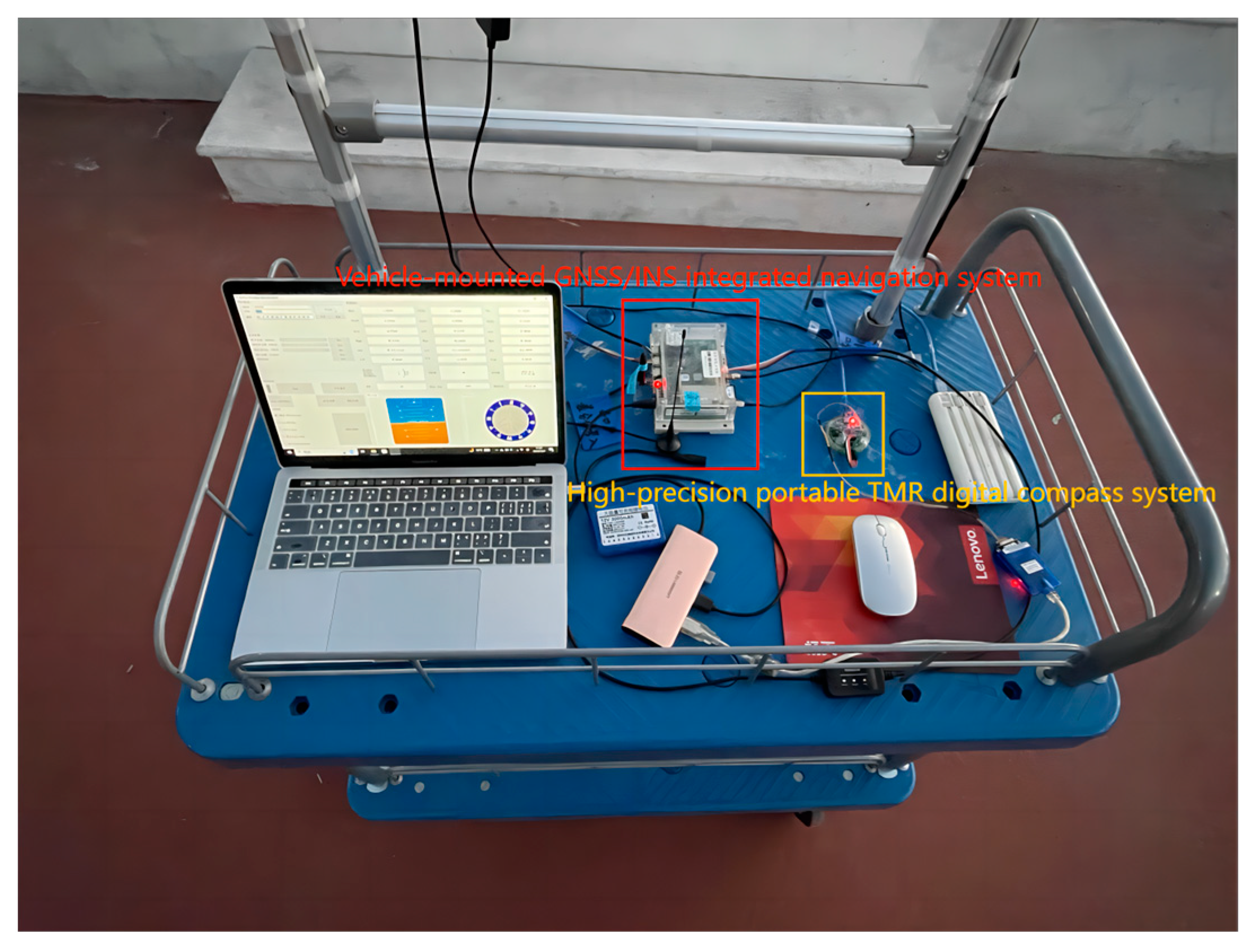
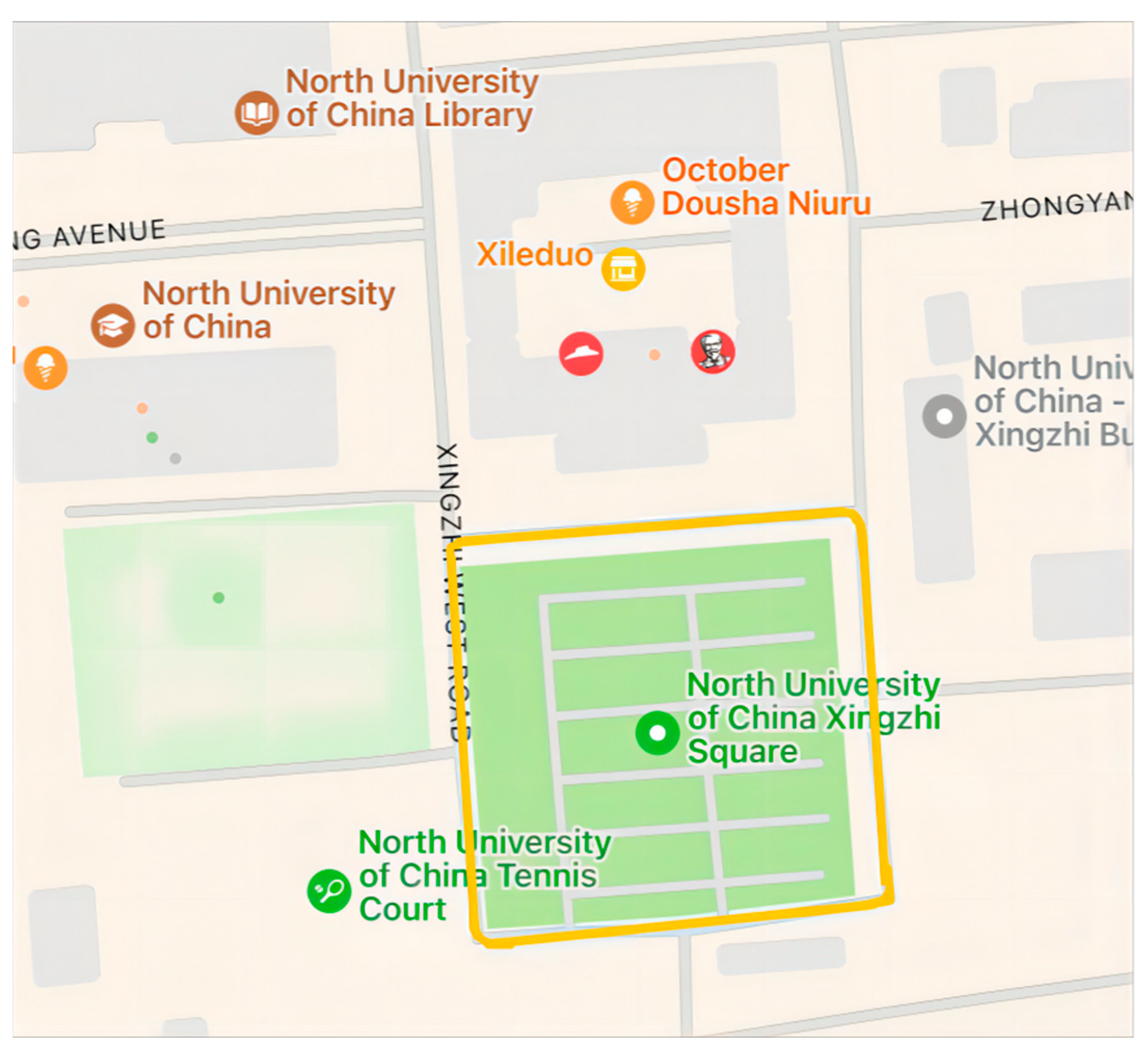
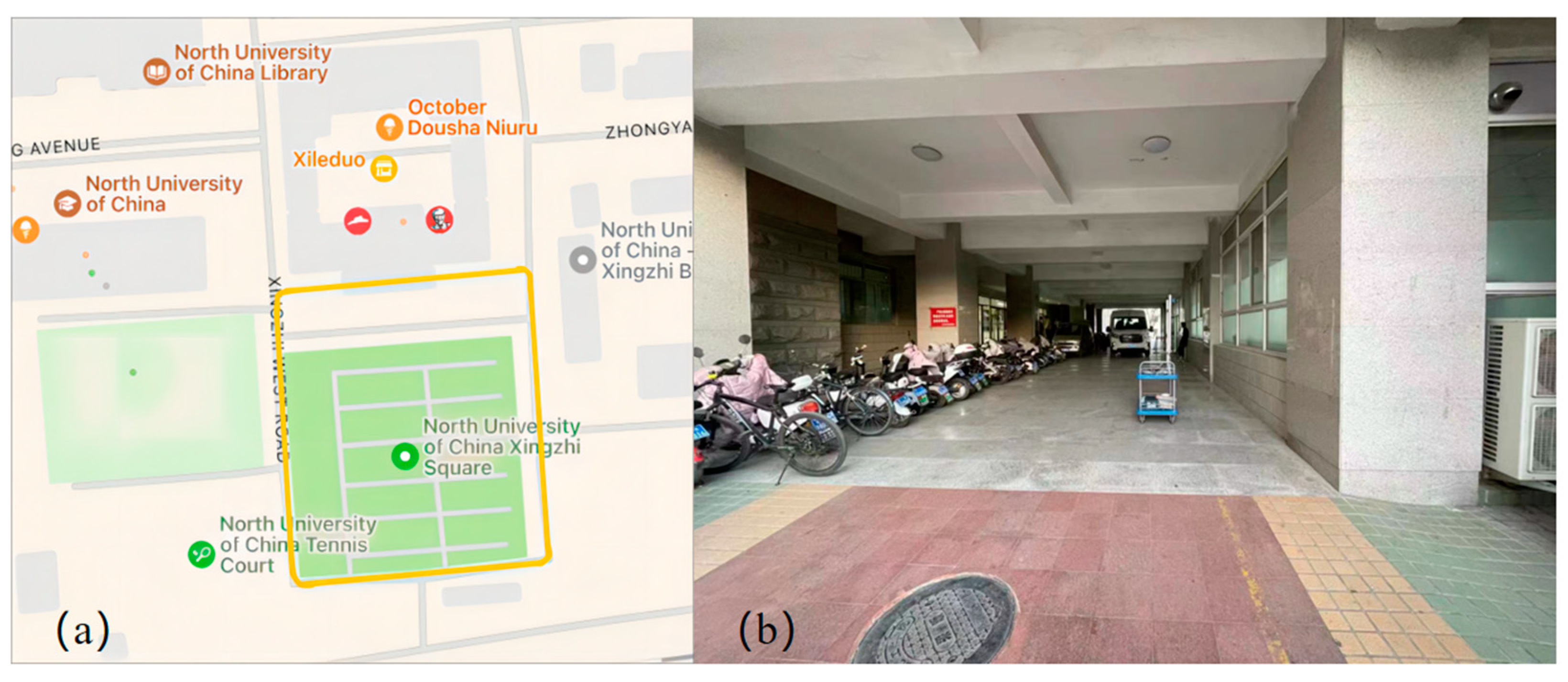
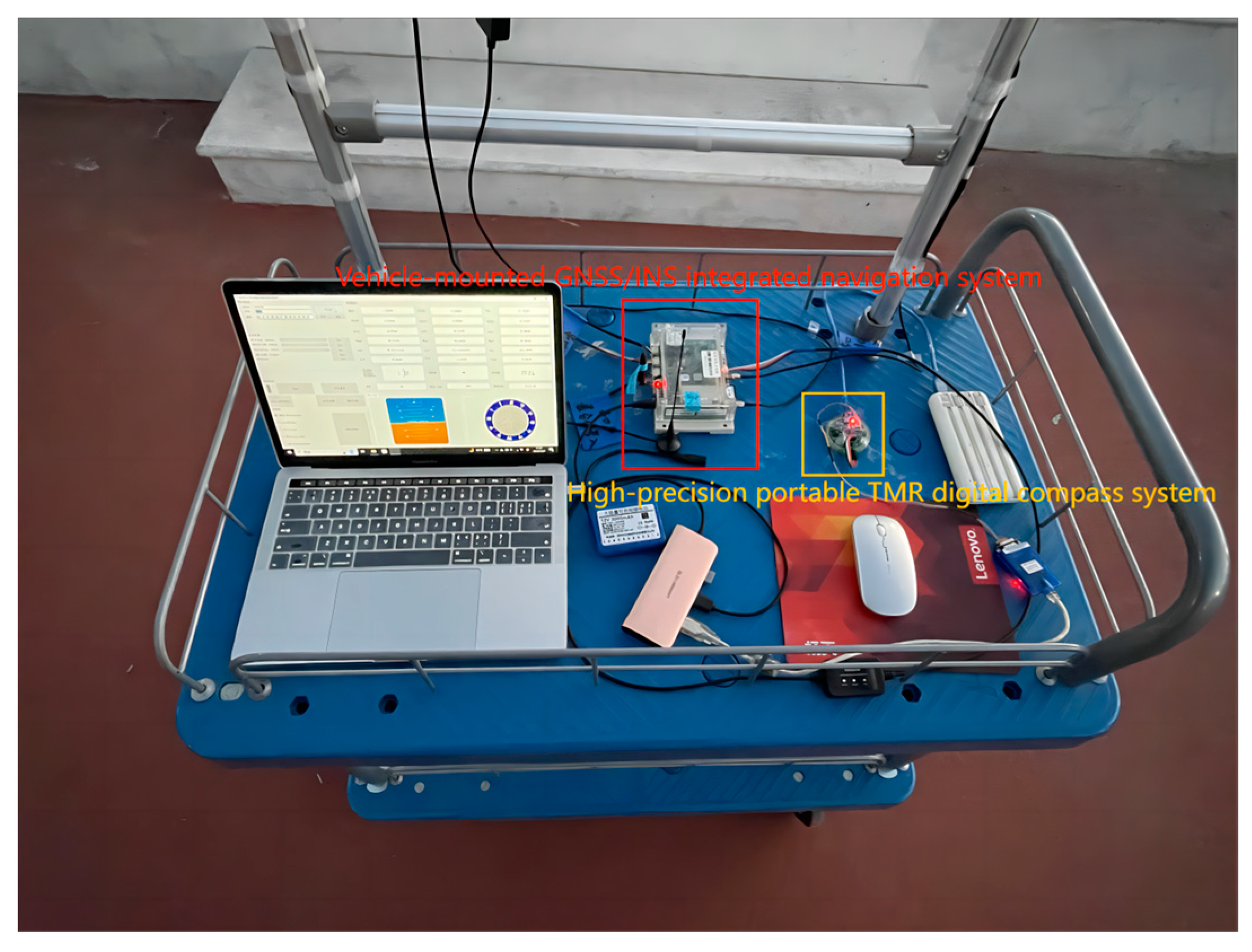
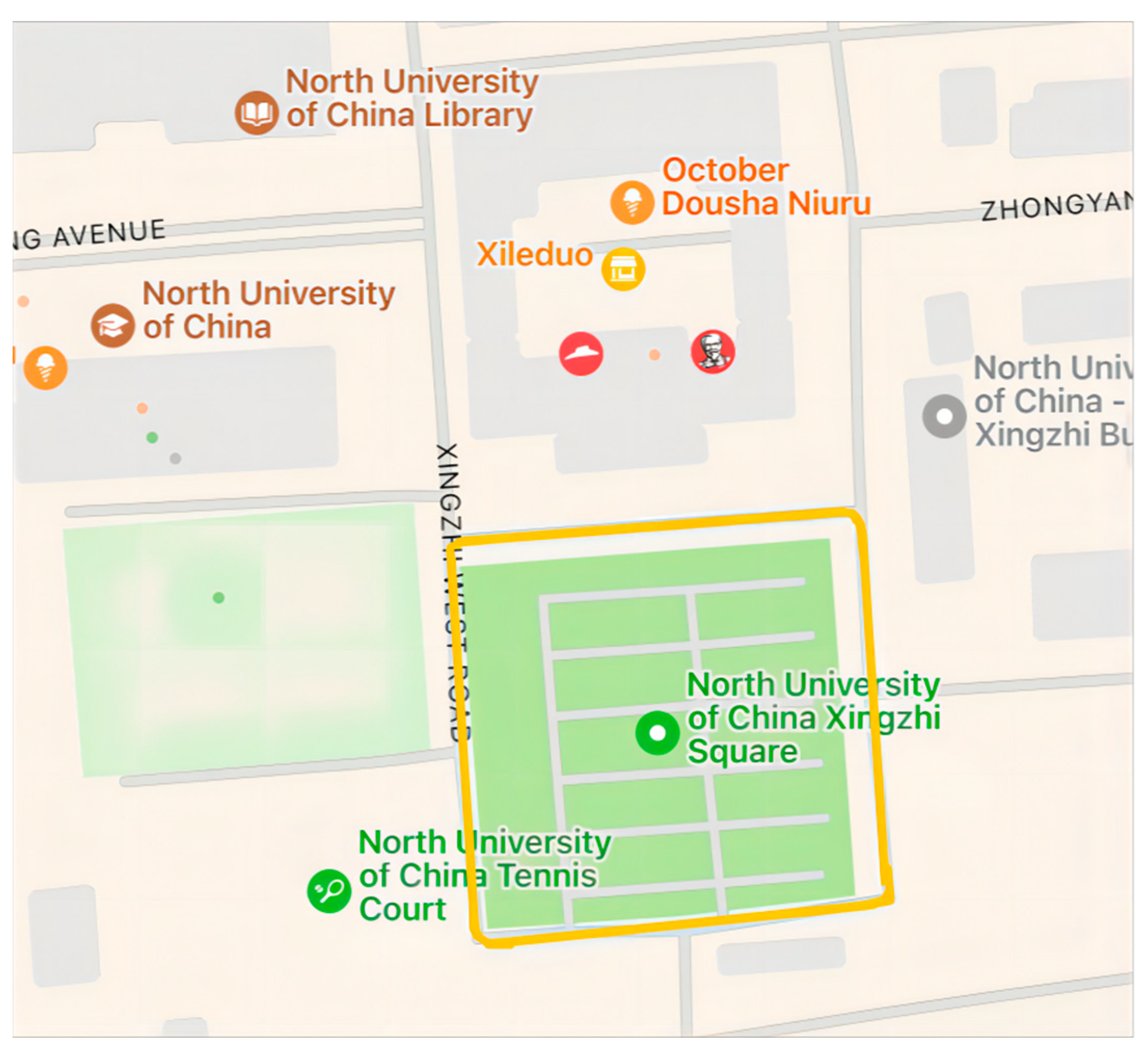
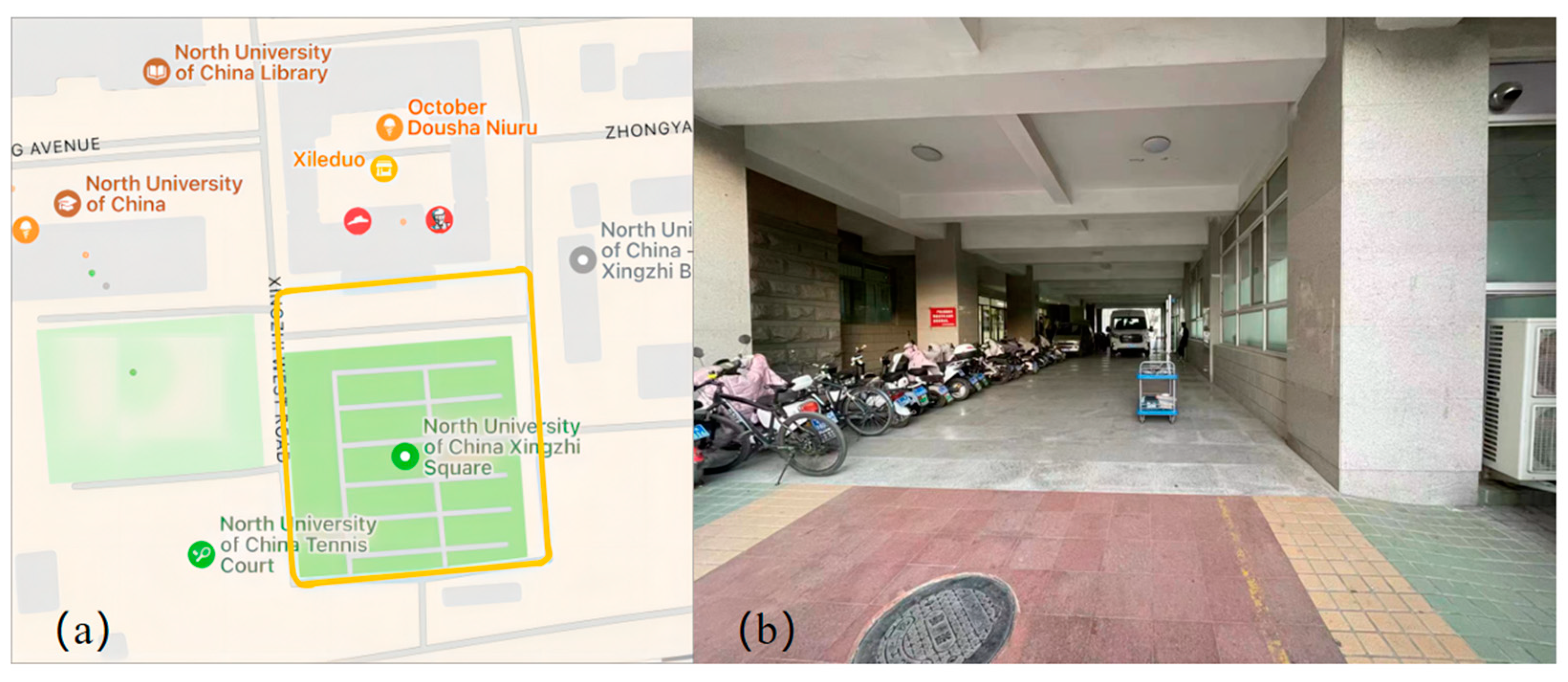
3.2. Construction of Practical Test Platform for Digital Compass in CNS
3.2.1. Tests of Precision
3.2.2. Stability Tests
4. Results and Discussion
4.1. Digital Compass Self-Precision Test
4.2. Practical Experiment of Digital Compass in CNS
4.2.1. Precision Experiment
4.2.2. Stability Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Thombre, S.; Zhao, Z.; Ramm-Schmidt, H.; García, J.M.V.; Malkamäki, T.; Nikolskiy, S.; Hammarberg, T.; Nuortie, H.; Bhuiyan, M.Z.H.; Särkkä, S. Sensors and AI techniques for situational awareness in autonomous ships: A review. IEEE Trans. Intell. Transp. Syst. 2020, 23, 64–83. [Google Scholar] [CrossRef]
- Aldalbahi, A.; Siasi, N.; Mazin, A.; Jasim, M.A. Digital compass for multi-user beam access in mmWave cellular networks. Digit. Commun. Netw. 2023, 9, 879–886. [Google Scholar] [CrossRef]
- He, Y.; Li, J.; Liu, J. Research on GNSS INS & GNSS/INS Integrated Navigation Method for Autonomous Vehicles: A Survey. IEEE Access 2023, 11, 79033–79055. [Google Scholar]
- Boguspayev, N.; Akhmedov, D.; Raskaliyev, A.; Kim, A.; Sukhenko, A. A Comprehensive Review of GNSS/INS Integration Techniques for Land and Air Vehicle Applications. Appl. Sci. 2023, 13, 4819. [Google Scholar] [CrossRef]
- Xu, C.; Zhang, J.; Zhang, Z.; Hou, J.; Wen, X. Data and Service Security of GNSS Sensors Integrated with Cryptographic Module. Micromachines 2023, 14, 454. [Google Scholar] [CrossRef]
- Xiang, Z.; Zhang, T.; Wang, Q.; Jin, S.; Nie, X.; Duan, C.; Zhou, J. A SINS/GNSS/2D-LDV integrated navigation scheme for unmanned ground vehicles. Meas. Sci. Technol. 2023, 34, 125116. [Google Scholar] [CrossRef]
- Feng, Y.; Huang, G.; Jing, C.; Li, X.; Li, Z. GNSS/MEMS IMU vehicle integrated navigation algorithm constrained by displacement vectors in urban environment. Meas. Sci. Technol. 2023, 34, 125157. [Google Scholar] [CrossRef]
- Cao, Y.; Bai, H.; Jin, K.; Zou, G. An GNSS/INS Integrated Navigation Algorithm Based on PSO-LSTM in Satellite Rejection. Electronics 2023, 12, 2905. [Google Scholar] [CrossRef]
- Andò, B.; Baglio, S.; Crispino, R.; Marletta, V. Polymeric transducers: An inkjet printed b-field sensor with resistive readout strategy. Sensors 2019, 19, 5318. [Google Scholar] [CrossRef]
- Prakash, A.; Tyagi, P.; Katiyar, A.K.; Dubey, S.K. A microcontroller-based compact device for measuring weak magnetic fields. IEEE Sens. J. 2023, 23, 14339–14345. [Google Scholar] [CrossRef]
- Mion, T.; D’Agati, M.J.; Sofronici, S.; Bussmann, K.; Staruch, M.; Kost, J.L.; Co, K.; Olsson III, R.H.; Finkel, P. High Isolation, Double-Clamped, Magnetoelectric Microelectromechanical Resonator Magnetometer. Sensors 2023, 23, 8626. [Google Scholar] [CrossRef]
- Lee, S.; Ryu, K.; Choi, D.; Park, S.; Kim, J.; Cha, W.; Gu, B.; Hong, J.; Park, S.; Jang, E. Design and Testing of an Adaptive In-phase Magnetometer (AIMAG), the Equatorial-Electrojet-Detecting Fluxgate Magnetometer, for the CAS500-3 Satellite. Remote Sens. 2023, 15, 4829. [Google Scholar] [CrossRef]
- Dou, A.; Bai, R.; Sun, Y.; Tu, J.; Kou, C.; Xie, X.; Qian, Z. Equivalent Noise Analysis and Modeling for a Magnetic Tunnel Junction Magnetometer with In Situ Magnetic Feedback. Magnetochemistry 2023, 9, 214. [Google Scholar] [CrossRef]
- Murra, D.; Bollanti, S.; Di Lazzaro, P.; Flora, F.; Mezi, L. Interfacing Arduino Boards with Optical Sensor Arrays: Overview and Realization of an Accurate Solar Compass. Sensors 2023, 23, 9787. [Google Scholar] [CrossRef]
- Acosta, D.; Fariña, B.; Toledo, J.; Sanchez, L.A. Low Cost Magnetic Field Control for Disabled People. Sensors 2023, 23, 1024. [Google Scholar] [CrossRef]
- Șipoș, E.; Ciuciu, C.; Ivanciu, L. Sensor-based prototype of a smart assistant for visually impaired people—Preliminary results. Sensors 2022, 22, 4271. [Google Scholar] [CrossRef]
- Sun, Y.; Guan, L.; Chang, Z.; Li, C.; Gao, Y. Design of a low-cost indoor navigation system for food delivery robot based on multi-sensor information fusion. Sensors 2019, 19, 4980. [Google Scholar] [CrossRef]
- Makar, A. Determination of USV’s Direction Using Satellite and Fluxgate Compasses and GNSS-RTK. Sensors 2022, 22, 7895. [Google Scholar] [CrossRef]
- Patonis, P.; Patias, P.; Tziavos, I.N.; Rossikopoulos, D.; Margaritis, K.G. A fusion method for combining low-cost IMU/magnetometer outputs for use in applications on mobile devices. Sensors 2018, 18, 2616. [Google Scholar] [CrossRef]
- Gomez-Gil, J.; Alonso-Garcia, S.; Gómez-Gil, F.J.; Stombaugh, T. A simple method to improve autonomous GPS positioning for tractors. Sensors 2011, 11, 5630–5644. [Google Scholar] [CrossRef]
- Sun, R.; Cheng, Q.; Xue, D.; Wang, G.; Ochieng, W.Y. GNSS/electronic compass/road segment information fusion for vehicle-to-vehicle collision avoidance application. Sensors 2017, 17, 2724. [Google Scholar] [CrossRef]
- Song, X.; Li, X.; Tang, W.; Zhang, W.; Li, B. A hybrid positioning strategy for vehicles in a tunnel based on RFID and in-vehicle sensors. Sensors 2014, 14, 23095–23118. [Google Scholar] [CrossRef]
- Fu, J.; Ning, Z.; Li, B.; Lv, T. Research on control algorithm of strong magnetic interference compensation for MEMS electronic compass. Measurement 2023, 207, 112370. [Google Scholar] [CrossRef]
- Zhang, X.; Mao, Z.; Ma, Y.; Hou, L.; Zhang, X.; Jiang, F.; Kang, C. Attitude magnetic measurement compensation method of fiber-optic submarine seismometer. IEEE Sens. J. 2022, 22, 13023–13029. [Google Scholar] [CrossRef]
- Mu, Y.; Chen, L.; Xiao, Y. Small Signal Magnetic Compensation Method for UAV-Borne Vector Magnetometer System. IEEE Trans. Instrum. Meas. 2023, 72, 1004107. [Google Scholar] [CrossRef]
- Xu, P. Fast and almost unbiased weighted least squares fitting of circles. Measurement 2023, 206, 112294. [Google Scholar] [CrossRef]
- Ji, C.; Song, C.; Li, S.; Wu, Y.; Chen, Q. An Online Combined Compensation Method of Geomagnetic Measurement Error. IEEE Sens. J. 2022, 22, 14026–14037. [Google Scholar] [CrossRef]
- Chi, C.; Wang, D.; Tao, R.; Yu, Z. Error Calibration of Cross Magnetic Gradient Tensor System with Total Least-Squares Method. Math. Probl. Eng. 2023, 2023, 6974834. [Google Scholar] [CrossRef]
- Lin, X.; Liang, X.; Li, W.; Chen, C.; Cheng, L.; Wang, H.; Zhang, Q. Adaptive Robust Least-Squares Smoothing Algorithm. IEEE Trans. Instrum. Meas. 2022, 71, 8505218. [Google Scholar] [CrossRef]
- Rodríguez-Rojo, E.; Cubas, J.; Pindado, S. On the UPMSat-2 magnetometer’s calibration methods performance comparison for poorly conditioned datasets. Measurement 2023, 207, 112381. [Google Scholar] [CrossRef]
- Yue, L.; Cheng, D.; Qiao, Y.; Zhao, J. Error Calibration for Full Tensor Magnetic Gradiometer Probe Based on Coordinate Transformation Method. IEEE Trans. Instrum. Meas. 2022, 71, 1005411. [Google Scholar] [CrossRef]
- Zhang, S.; Li, Z.; Wang, Q.; Yang, Y.; Wang, Y.; He, W.; Liu, J.; Tu, L.; Liu, H. Analysis of the Frequency-Dependent Vibration Rectification Error in Area-Variation-Based Capacitive MEMS Accelerometers. Micromachines 2023, 15, 65. [Google Scholar] [CrossRef]
- Jia, H.; Yu, B.; Li, H.; Pan, S.; Li, J.; Wang, X.; Huang, L. The improved method for indoor 3D pedestrian positioning based on dual foot-mounted IMU system. Micromachines 2023, 14, 2192. [Google Scholar] [CrossRef]
- Koo, G.; Kim, K.; Chung, J.Y.; Choi, J.; Kwon, N.-Y.; Kang, D.-Y.; Sohn, H. Development of a high precision displacement measurement system by fusing a low cost RTK-GPS sensor and a force feedback accelerometer for infrastructure monitoring. Sensors 2017, 17, 2745. [Google Scholar] [CrossRef]
- Wang, S.; Qiu, Z.; Huang, P.; Yu, X.; Yang, J.; Guo, L. A Bioinspired Navigation System for Multirotor UAV by Integrating Polarization Compass/Magnetometer/INS/GNSS. IEEE Trans. Ind. Electron. 2022, 70, 8526–8536. [Google Scholar] [CrossRef]
- Yuan, G.; Shi, S.; Shen, G.; Niu, Q.; Zhu, Z.; Wang, Q. MIAKF: Motion Inertia Estimated Adaptive Kalman Filtering for Underground Mine Tunnel Positioning. IEEE Trans. Instrum. Meas. 2023, 72, 9507311. [Google Scholar] [CrossRef]
- Wang, F.; Geng, J. GNSS PPP-RTK tightly coupled with low-cost visual-inertial odometry aiming at urban canyons. J. Geod. 2023, 97, 66. [Google Scholar] [CrossRef]
- Wu, G.; Fang, X.; Song, Y.; Liang, M.; Chen, N. Study on the Shearer Attitude Sensing Error Compensation Method Based on Strapdown Inertial Navigation System. Appl. Sci. 2022, 12, 10848. [Google Scholar] [CrossRef]
- Gao, G.; Gao, B.; Gao, S.; Hu, G.; Zhong, Y. A hypothesis test-constrained robust Kalman filter for INS/GNSS integration with abnormal measurement. IEEE Trans. Veh. Technol. 2022, 72, 1662–1673. [Google Scholar] [CrossRef]
- Yan, Y.; Zhang, B.; Zhou, J.; Zhang, Y.; Liu, X.a. Real-Time Localization and Mapping Utilizing Multi-Sensor Fusion and Visual–IMU–Wheel Odometry for Agricultural Robots in Unstructured, Dynamic and GPS-Denied Greenhouse Environments. Agronomy 2022, 12, 1740. [Google Scholar] [CrossRef]
- Wang, J.; Chen, X.; Shi, C.; Liu, J. Robust M-estimation-Based ICKF for GNSS Outlier Mitigation in GNSS/SINS navigation applications. IEEE Trans. Instrum. Meas. 2023, 72, 8505617. [Google Scholar] [CrossRef]
- Yue, Z.; Tang, C.; Gao, Y. A novel three-stage robust adaptive filtering algorithm for Visual-Inertial Odometry in GNSS-denied environments. IEEE Sens. J. 2023, 23, 17499–17509. [Google Scholar] [CrossRef]
- Hu, G.; Xu, L.; Gao, B.; Chang, L.; Zhong, Y. Robust unscented Kalman filter based decentralized multi-sensor information fusion for INS/GNSS/CNS integration in hypersonic vehicle navigation. IEEE Trans. Instrum. Meas. 2023, 72, 8504011. [Google Scholar] [CrossRef]
- Li, S.; Wang, S.; Zhou, Y.; Shen, Z.; Li, X. Tightly coupled integration of GNSS, INS, and LiDAR for vehicle navigation in urban environments. IEEE Internet Things J. 2022, 9, 24721–24735. [Google Scholar] [CrossRef]
- Zheng, Z.; Li, X.; Kong, D.; Hu, J.; Hu, Y. An effective fusion positioning methodology for land vehicles in GPS-denied environments using low-cost sensors. Meas. Sci. Technol. 2023, 34, 125102. [Google Scholar] [CrossRef]
- Pang, Y.; Zhou, Z.; Pan, X.; Song, N. An INS/geomagnetic integrated navigation method for coarse estimation of positioning error and search area adaption applied to high-speed aircraft. IEEE Sens. J. 2023, 23, 7766–7775. [Google Scholar] [CrossRef]
- Lu, Y.; Xiong, L.; Xia, X.; Gao, L.; Yu, Z. Vehicle heading angle and IMU heading mounting angle improvement leveraging GNSS course angle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2023, 237, 2249–2261. [Google Scholar] [CrossRef]
- Yin, Z.; Yang, J.; Ma, Y.; Wang, S.; Chai, D.; Cui, H. A Robust Adaptive Extended Kalman Filter Based on an Improved Measurement Noise Covariance Matrix for the Monitoring and Isolation of Abnormal Disturbances in GNSS/INS Vehicle Navigation. Remote Sens. 2023, 15, 4125. [Google Scholar] [CrossRef]
- Chen, Q.; Lin, H.; Kuang, J.; Luo, Y.; Niu, X. Rapid Initial Heading Alignment for MEMS Land Vehicular GNSS/INS Navigation System. IEEE Sens. J. 2023, 23, 7656–7666. [Google Scholar] [CrossRef]
- Liu, W.; Shi, Y.; Hu, Y.; Hsieh, T.-H.; Wang, S. An improved GNSS/INS navigation method based on cubature Kalman filter for occluded environment. Meas. Sci. Technol. 2022, 34, 035107. [Google Scholar] [CrossRef]
- Zhao, H.; Shen, C.; Cao, H.; Chen, X.; Wang, C.; Huang, H.; Li, J. Seamless Micro-Electro-Mechanical System-Inertial Navigation System/Polarization Compass Navigation Method with Data and Model Dual-Driven Approach. Micromachines 2024, 15, 237. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Zhang, X.; Gao, L.; Liu, J.; Zhou, J. Real-Time Attitude Estimation for Spinning Projectiles by Magnetometer Based on an Adaptive Extended Kalman Filter. Micromachines 2023, 14, 2000. [Google Scholar] [CrossRef] [PubMed]
- Zhao, T.; Wang, C.; Shen, C. Seamless MEMS-INS/Geomagnetic Navigation System Based on Deep-Learning Strong Tracking Square-Root Cubature Kalman Filter. Micromachines 2023, 14, 1935. [Google Scholar] [CrossRef] [PubMed]
- Lu, C.; Wang, S.; Shin, K.; Dong, W.; Li, W. Experimental Research of Triple Inertial Navigation System Shearer Positioning. Micromachines 2023, 14, 1474. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Zhang, H.; Gao, X.; Zhao, R. The Tobit-Unscented-Kalman-Filter-Based Attitude Estimation Algorithm Using the Star Sensor and Inertial Gyro Combination. Micromachines 2023, 14, 1243. [Google Scholar] [CrossRef] [PubMed]
- Sun, W.; Sun, P.; Wu, J. An Adaptive Fusion Attitude and Heading Measurement Method of MEMS/GNSS Based on Covariance Matching. Micromachines 2022, 13, 1787. [Google Scholar] [CrossRef] [PubMed]
- Liu, N.; Qi, W.; Su, Z.; Feng, Q.; Yuan, C. Research on Gradient-Descent Extended Kalman Attitude Estimation Method for Low-Cost MARG. Micromachines 2022, 13, 1283. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Cai, Y.; Zhang, L.; Wang, Y. Attitude Estimation Algorithm of Portable Mobile Robot Based on Complementary Filter. Micromachines 2021, 12, 1373. [Google Scholar] [CrossRef] [PubMed]
- Mohamed, H.G.; Khater, H.A.; Moussa, K.H. An intelligent combined visual navigation brain model/GPS/MEMS–INS/ADSFCF method to develop vehicle independent guidance solutions. Micromachines 2021, 12, 718. [Google Scholar] [CrossRef]
- Zhao, W.; Cheng, Y.; Zhao, S.; Hu, X.; Rong, Y.; Duan, J.; Chen, J. Navigation grade MEMS IMU for a satellite. Micromachines 2021, 12, 151. [Google Scholar] [CrossRef]
- Liu, S.; Li, S.; Fu, Q.; Tao, Y.; Wu, F. A New MIMU/GNSS Ultra-Tightly Coupled Integration Architecture for Mitigating Abrupt Changes of Frequency Tracking Errors. Micromachines 2020, 11, 1117. [Google Scholar] [CrossRef] [PubMed]
- Du, B.; Shi, Z.; Song, J.; Wang, H.; Han, L. A fault-tolerant data fusion method of MEMS Redundant Gyro system based on weighted distributed Kalman filtering. Micromachines 2019, 10, 278. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; El-Sheimy, N.; Yu, C.; Qin, Y. Motion constraints and vanishing point aided land vehicle navigation. Micromachines 2018, 9, 249. [Google Scholar] [CrossRef] [PubMed]
- Mohri, K.; Uchiyama, T.; Panina, L.V.; Yamamoto, M.; Bushida, K. Recent advances of amorphous wire CMOS IC magneto-impedance sensors: Innovative high-performance micromagnetic sensor chip. J. Sens. 2015, 2015, 718069. [Google Scholar] [CrossRef]
- Uchiyama, T.; Mohri, K.; Honkura, Y.; Panina, L. Recent advances of pico-Tesla resolution magneto-impedance sensor based on amorphous wire CMOS IC MI sensor. IEEE Trans. Magn. 2012, 48, 3833–3839. [Google Scholar] [CrossRef]
- Mohri, K.; Yamamoto, M.; Uchiyama, T. Application topics of amorphous wire CMOS IC magneto-impedance micromagnetic sensors for IoT smart society. J. Sens. 2019, 2019, 8285240. [Google Scholar] [CrossRef]
- Ma, J.; Uchiyama, T. High performance single element MI magnetometer with peak-to-peak voltage detector by synchronized switching. IEEE Trans. Magn. 2017, 53, 4003404. [Google Scholar] [CrossRef]
- Mohri, K.; Humphrey, F.B.; Panina, L.V.; Honkura, Y.; Yamasaki, J.; Uchiyama, T.; Hirami, M. Advances of amorphous wire magnetics over 27 years. Phys. Status Solidi (A) 2009, 206, 601–607. [Google Scholar] [CrossRef]
- Nakamura, Y.; Uchiyama, T.; Cai, C.; Mohri, K. Pwm-type amorphous wire cmos ic magneto-impedance sensor having high-temperature stability. IEEE Trans. Magn. 2008, 44, 3981–3984. [Google Scholar] [CrossRef]
- Mohri, K.; Honkura, Y.; Panina, L.; Uchiyama, T. Super MI sensor: Recent advances of amorphous wire and CMOS-IC magneto-impedance sensor. J. Nanosci. Nanotechnol. 2012, 12, 7491–7495. [Google Scholar] [CrossRef]
- Zhukov, A.; Ipatov, M.; Talaat, A.; Blanco, J.M.; Zhukova, V. Effect of annealing on off-diagonal GMI effect of Co-rich amorphous microwires. IEEE Trans. Magn. 2014, 50, 2006504. [Google Scholar] [CrossRef]
- Pérez, N.; Melzer, M.; Makarov, D.; Ueberschär, O.; Ecke, R.; Schulz, S.E.; Schmidt, O.G. High-performance giant magnetoresistive sensorics on flexible Si membranes. Appl. Phys. Lett. 2015, 106, 153501. [Google Scholar] [CrossRef]
- Liu, C.; Liu, B.; Xu, Z.; Zhou, G.; Wilde, G.; Ye, F. Optimizing the magnetic and giant magneto-impedance (GMI) properties of glass-coated amorphous Co-based wires via single-and two-step direct current annealing. J. Phys. D Appl. Phys. 2022, 56, 035002. [Google Scholar] [CrossRef]
- Chlenova, A.A.; Moiseev, A.A.; Derevyanko, M.S.; Semirov, A.V.; Lepalovsky, V.N.; Kurlyandskaya, G.V. Permalloy-based thin film structures: Magnetic properties and the giant magnetoimpedance effect in the temperature range important for biomedical applications. Sensors 2017, 17, 1900. [Google Scholar] [CrossRef]
- Zhukova, V.; Ipatov, M.; Zhukov, A. Thin magnetically soft wires for magnetic microsensors. Sensors 2009, 9, 9216–9240. [Google Scholar] [CrossRef]
- Zhukov, A.; Ipatov, M.; Talaat, A.; Blanco, J.M.; Hernando, B.; Gonzalez-Legarreta, L.; Suñol, J.J.; Zhukova, V. Correlation of crystalline structure with magnetic and transport properties of glass-coated microwires. Crystals 2017, 7, 41. [Google Scholar] [CrossRef]
- Díaz-Rubio, A.; García-Miquel, H.; García-Chocano, V.M. In-plane omnidirectional magnetic field sensor based on Giant Magneto Impedance (GMI). J. Magn. Magn. Mater. 2017, 444, 249–255. [Google Scholar] [CrossRef]
- Zhukov, A.; Ipatov, M.; Corte-León, P.; Gonzalez-Legarreta, L.; Churyukanova, M.; Blanco, J.; Gonzalez, J.; Taskaev, S.; Hernando, B.; Zhukova, V. Giant magnetoimpedance in rapidly quenched materials. J. Alloys Compd. 2020, 814, 152225. [Google Scholar] [CrossRef]
- Liu, Z.; Lei, K.; Song, J.; Li, L.; Li, T. A Designed Calibration Approach for the Measurement-While-Drilling Instrument. Appl. Sci. 2022, 13, 61. [Google Scholar] [CrossRef]
- Pham, D.A.; Toan, N.D.; Pham, T.N. Validation of the magnetometer calibration algorithms based on geometric fitting. Mod. Phys. Lett. B 2023, 37, 2340009. [Google Scholar] [CrossRef]
- Ding, F. Least squares parameter estimation and multi-innovation least squares methods for linear fitting problems from noisy data. J. Comput. Appl. Math. 2023, 426, 115107. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | HALL | AMR | GMR | TMR |
|---|---|---|---|---|
| Advantage | Low cost CMOS integration | High signal-to-noise ratio | High sensitivity | Extremely high sensitivity |
| Large rate of change in magnetic resistance | ||||
| High stability | Good linearity | |||
| Large measurement range | Small zero drift | Good temperature stability | ||
| Set/Reset function, automatic calibration of zero point | No interlayer coupling effect | |||
| No need for magnetic ring structure and Set/Reset coils | ||||
| Disadvantage | Low signal-to-noise ratio | Low range | Large zero drift after being disturbed by a large magnetic field | Large zero drift after being disturbed by a large magnetic field |
| Low sensitivity | Narrow linear range | High cost | ||
| Large zero drift | Complex manufacturing process | Low linear range | ||
| Only the magnetic field in the Z-axis direction can be measured, and additional magnetic focusing structures are needed to measure signals in the XOY plane, which can result in significant magnetic hysteresis | Set/reset coils need to be set for preset/reset operations | There is interlayer coupling effect, which limit the application |
| Description | Header | Header | Data Type | Data Length | Data | XOR Value |
|---|---|---|---|---|---|---|
| Value | 0xA5 | 0x5A | ||||
| Byte Count | 1 Byte | 1 Byte | 1 Byte | 1 Byte | Byte | 1 Byte |
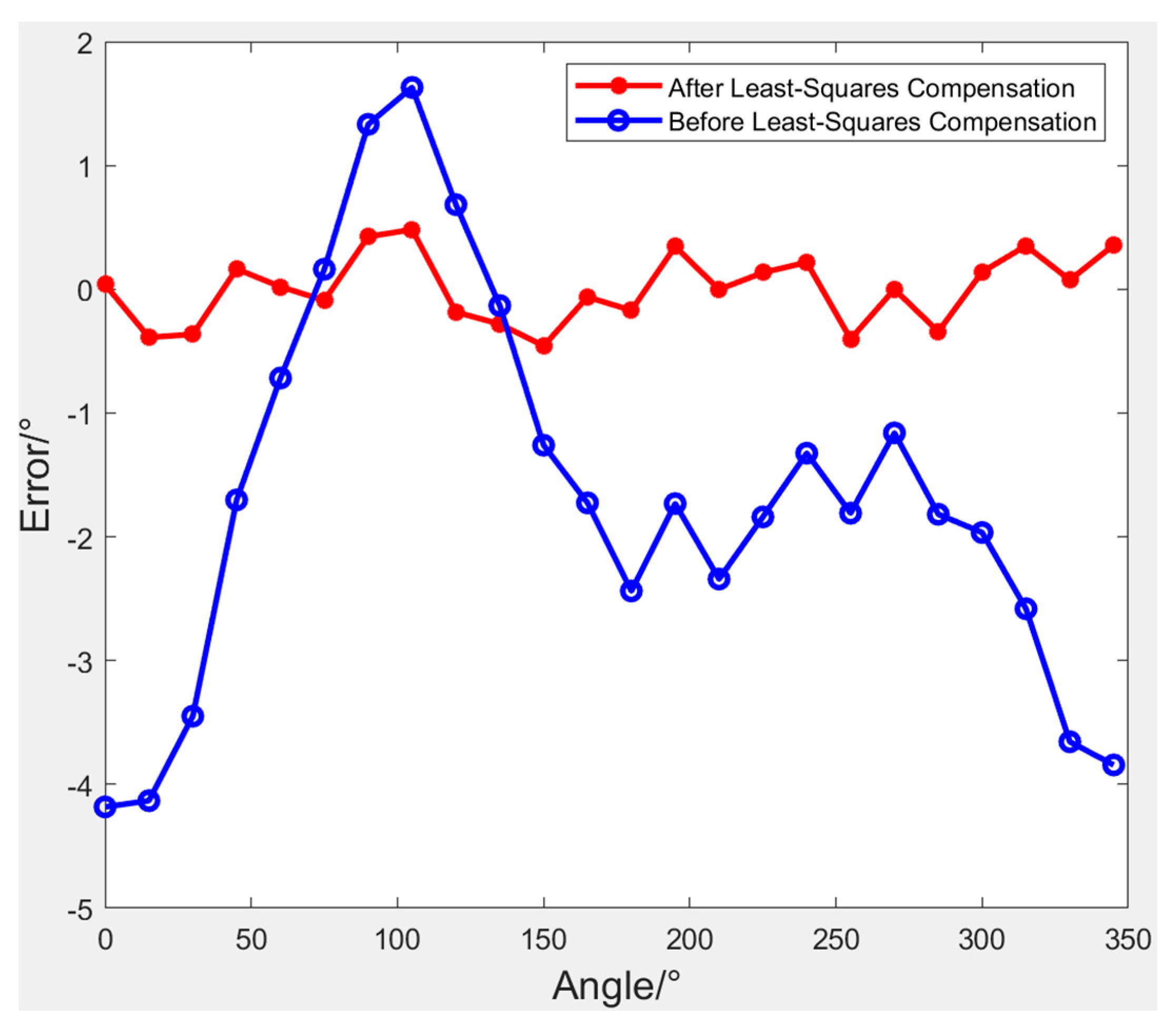
| Theoretical Angle Value (Unit: °) | Error before Compensation (Unit: °) | Error after Compensation (Unit: °) |
|---|---|---|
| 0 | −4.1824 | 0.0377 |
| 15 | −4.132 | −0.3884 |
| 30 | −3.4493 | −0.3647 |
| 45 | −1.702 | 0.1639 |
| 60 | −0.7173 | 0.0198 |
| 75 | 0.1618 | −0.0902 |
| 90 | 1.3323 | 0.4255 |
| 105 | 1.6308 | 0.4516 |
| 120 | 0.6833 | −0.1847 |
| 135 | −0.1324 | −0.2812 |
| 150 | −1.2602 | −0.4580 |
| 165 | −1.732 | −0.0628 |
| 180 | −2.438 | −0.1706 |
| 195 | −1.732 | 0.3447 |
| 210 | −2.341 | −0.0018 |
| 225 | −1.839 | 0.134 |
| 240 | −1.325 | 0.2174 |
| 255 | −1.809 | −0.4019 |
| 270 | −1.1611 | −0.0002 |
| 285 | −1.818 | −0.3419 |
| 300 | −1.9655 | 0.1395 |
| 315 | −2.5814 | 0.3512 |
| 330 | −3.6561 | 0.0749 |
| 345 | −3.8434 | 0.3564 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Cui, M.; Zhang, P. Development and Application of a High-Precision Portable Digital Compass System for Improving Combined Navigation Performance. Sensors 2024, 24, 2547. https://doi.org/10.3390/s24082547
Zhang S, Cui M, Zhang P. Development and Application of a High-Precision Portable Digital Compass System for Improving Combined Navigation Performance. Sensors. 2024; 24(8):2547. https://doi.org/10.3390/s24082547
Chicago/Turabian StyleZhang, Songhao, Min Cui, and Peng Zhang. 2024. "Development and Application of a High-Precision Portable Digital Compass System for Improving Combined Navigation Performance" Sensors 24, no. 8: 2547. https://doi.org/10.3390/s24082547
APA StyleZhang, S., Cui, M., & Zhang, P. (2024). Development and Application of a High-Precision Portable Digital Compass System for Improving Combined Navigation Performance. Sensors, 24(8), 2547. https://doi.org/10.3390/s24082547