
Neural Network Prediction of Locomotive Engine Parameters Based on the Dung Beetle Optimization Algorithm and Multi-Objective Optimization of Engine Operating Parameters

Abstract
1. Introduction
2. Optimization Methodology
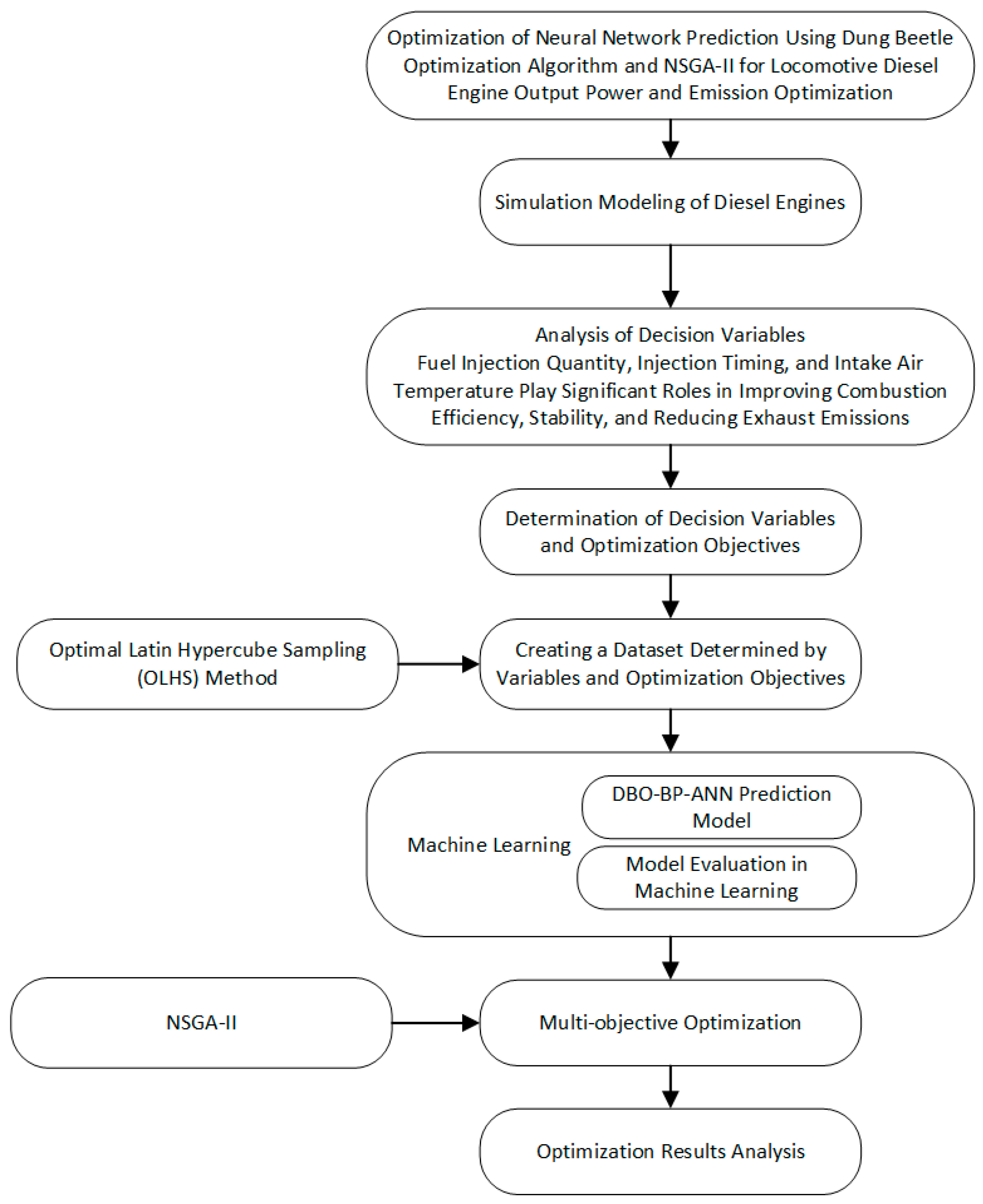
3. Diesel Engine Simulation Modeling and Prediction Optimization Process
3.1. Establishment of the Virtual Diesel Engine Model
3.2. Range of Decision Variables and Selection of the Neural Network Prediction Model
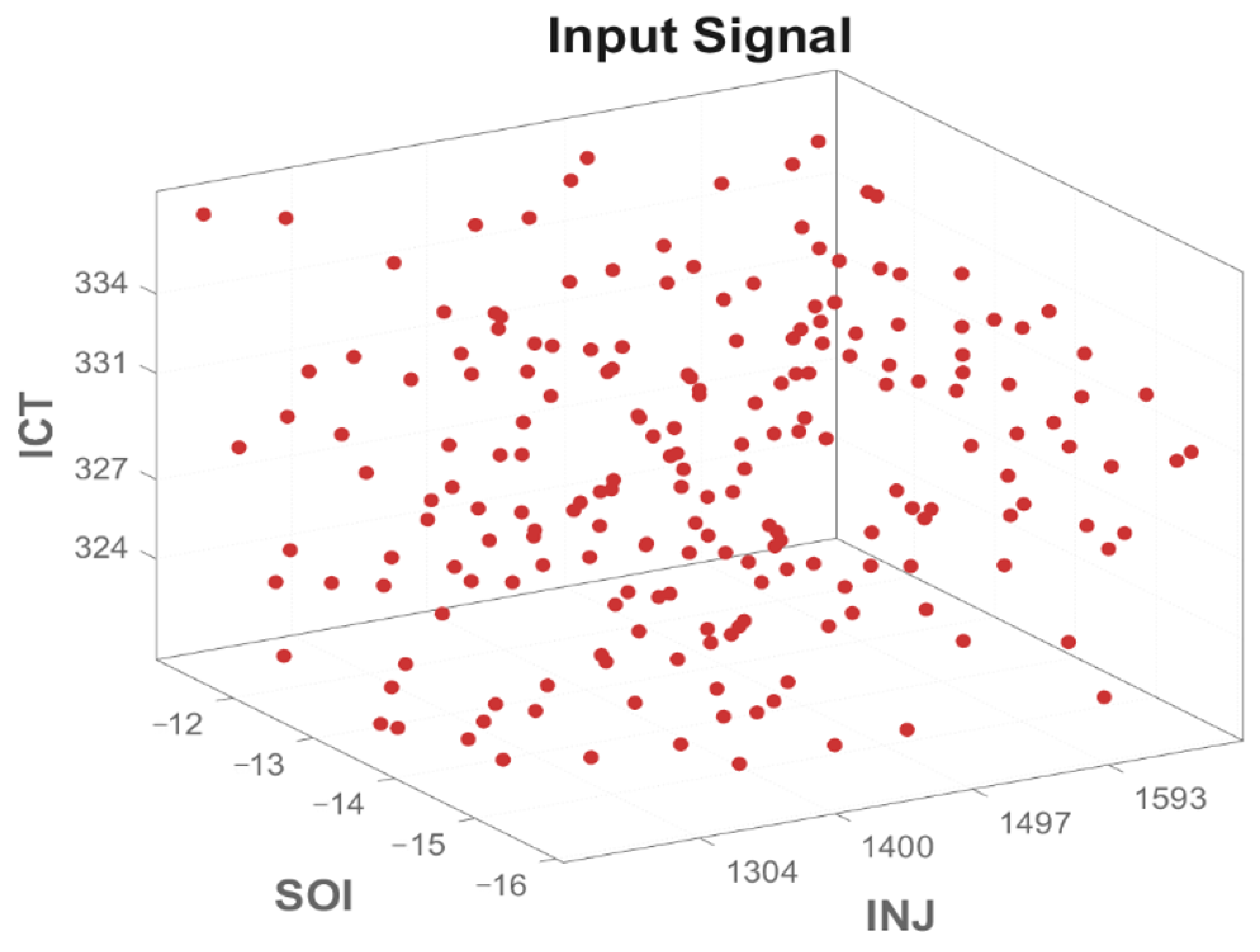
3.3. Acquisition of the Engine Dataset
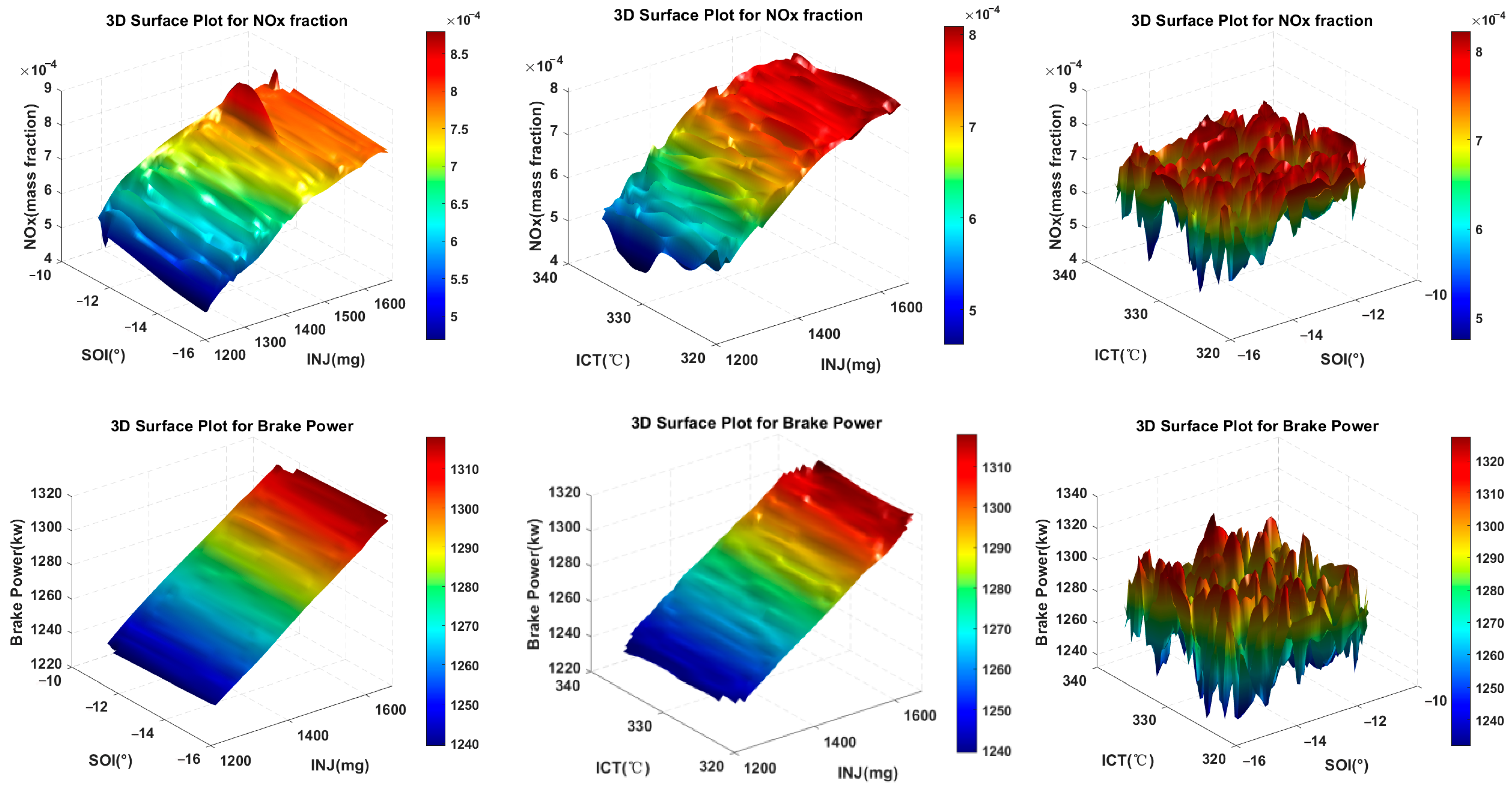
3.4. Impact of Decision Variables on Target Outputs
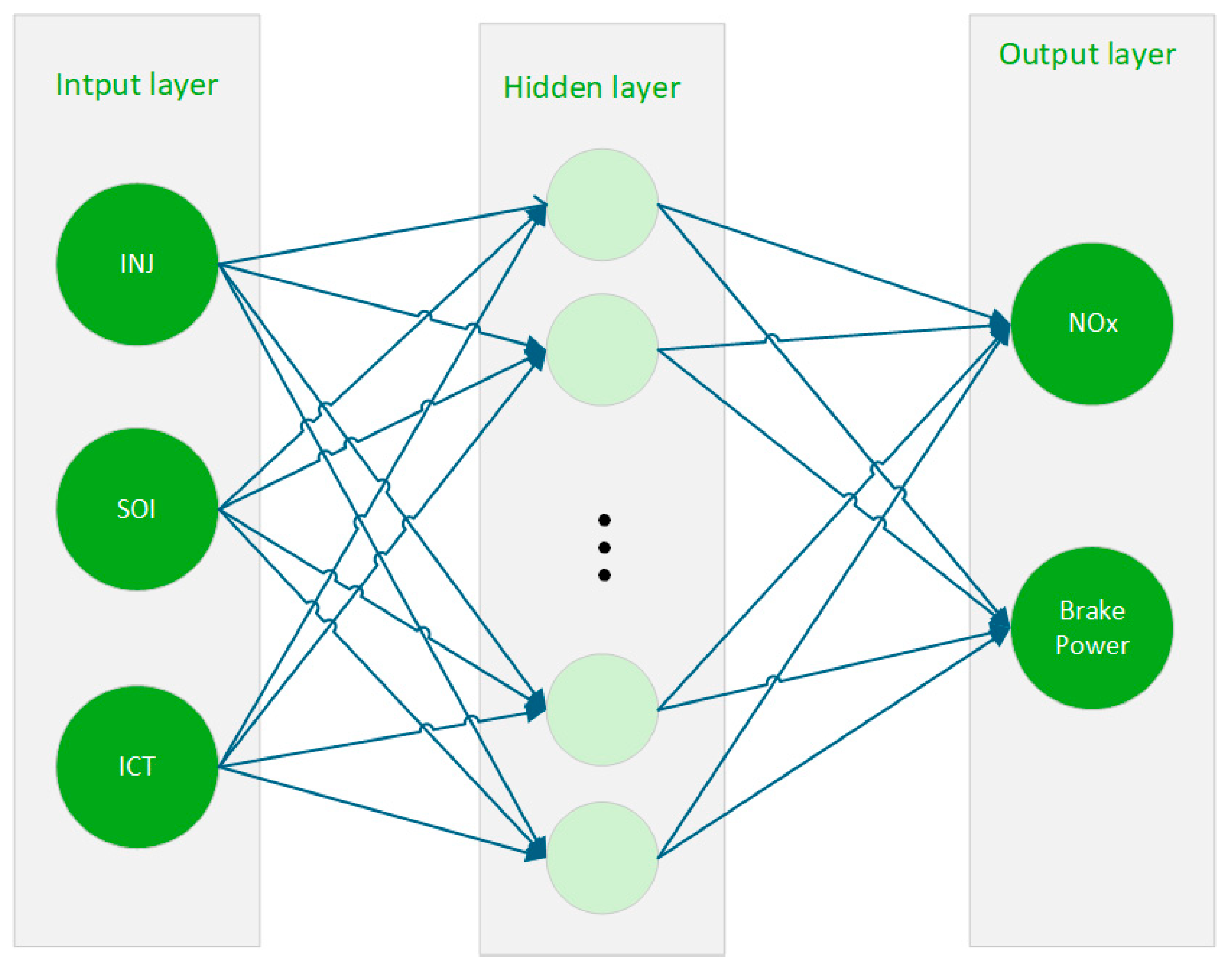
3.5. Neural Network Prediction Model Structure
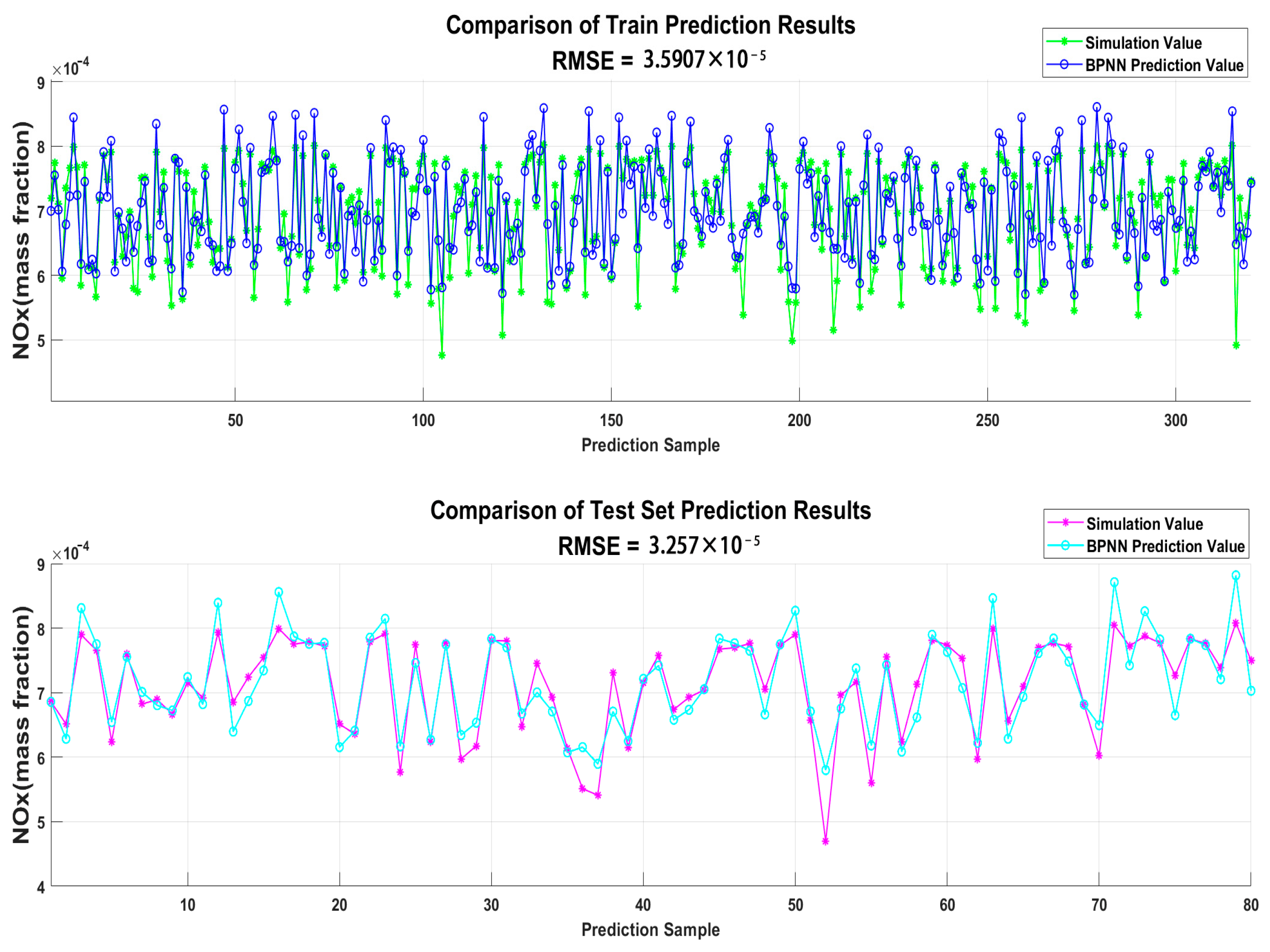
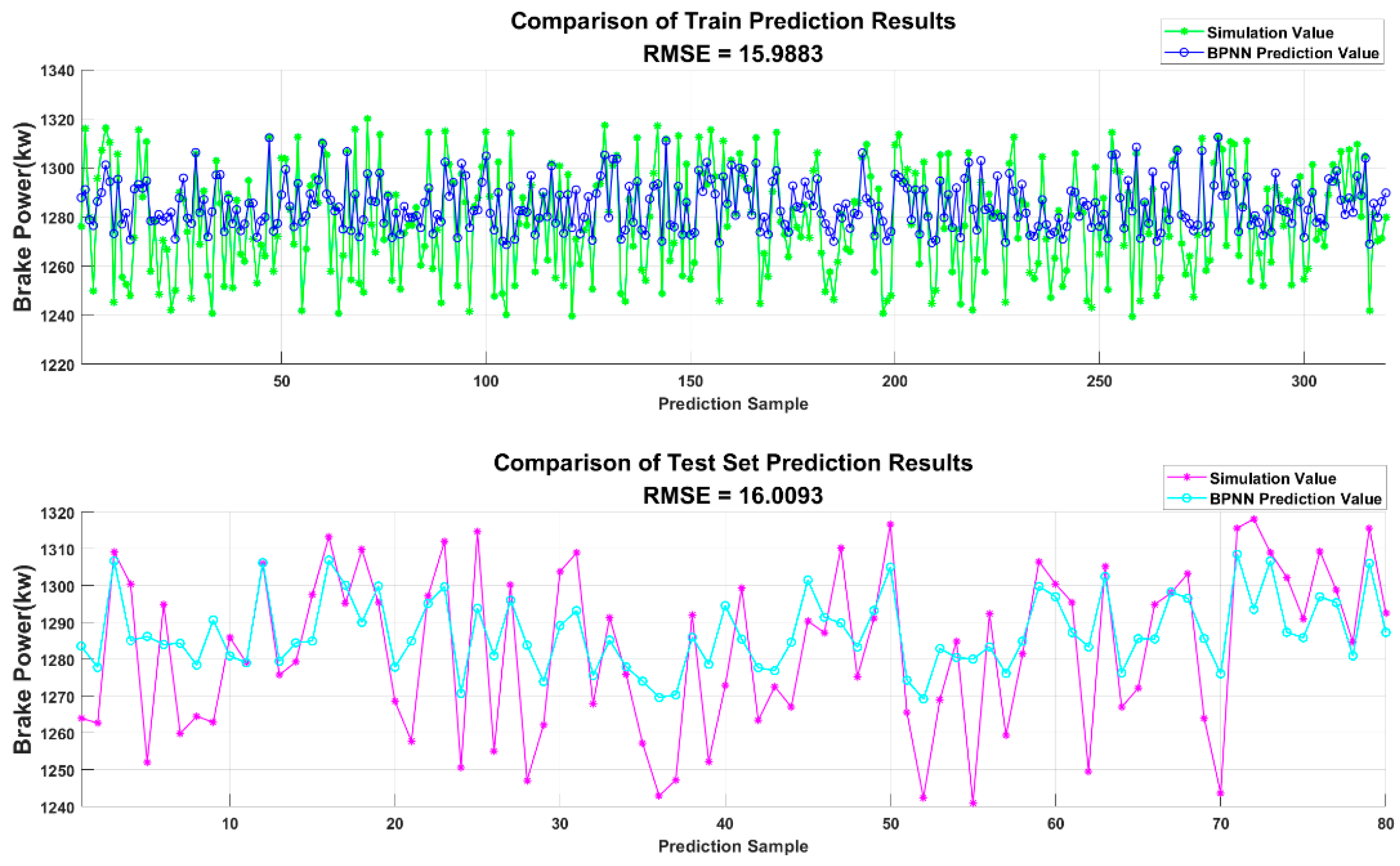
3.5.1. The Prediction Performance of the Traditional BPNN
- (1)
- First, initialize the structure of the neural network and determine the input and output dimensions. At the same time, initialize the weights and biases between the input layer, hidden layer, and output layer. Set the number of training iterations, target error, and learning rate. The activation function of the hidden layer is set to sigmoid, and the function expression is as follows:
- (2)
- Transfer the input data of the selected training set to the input layer of the neural network, and compute the outputs from the input layer to the hidden layer and from the hidden layer to the output layer.W1 and b1 represent the weights and biases for calculating the hidden layer, W2 and b2 represent the weights and biases for calculating the output layer, and represents the predicted results of the model.
- (3)
- Calculate the error between the predicted values and the actual expected values.δ2 is the error of the output layer, and δ1 is the error of the hidden layer.
- (4)
- After calculating the gradients of the weights and biases for the output layer, compute the gradients of the weights and biases for the hidden layer.
- (5)
- Update the weights and biases in the network.
- (6)
- Stop the loop when the target value is reached or the maximum number of iterations is satisfied.
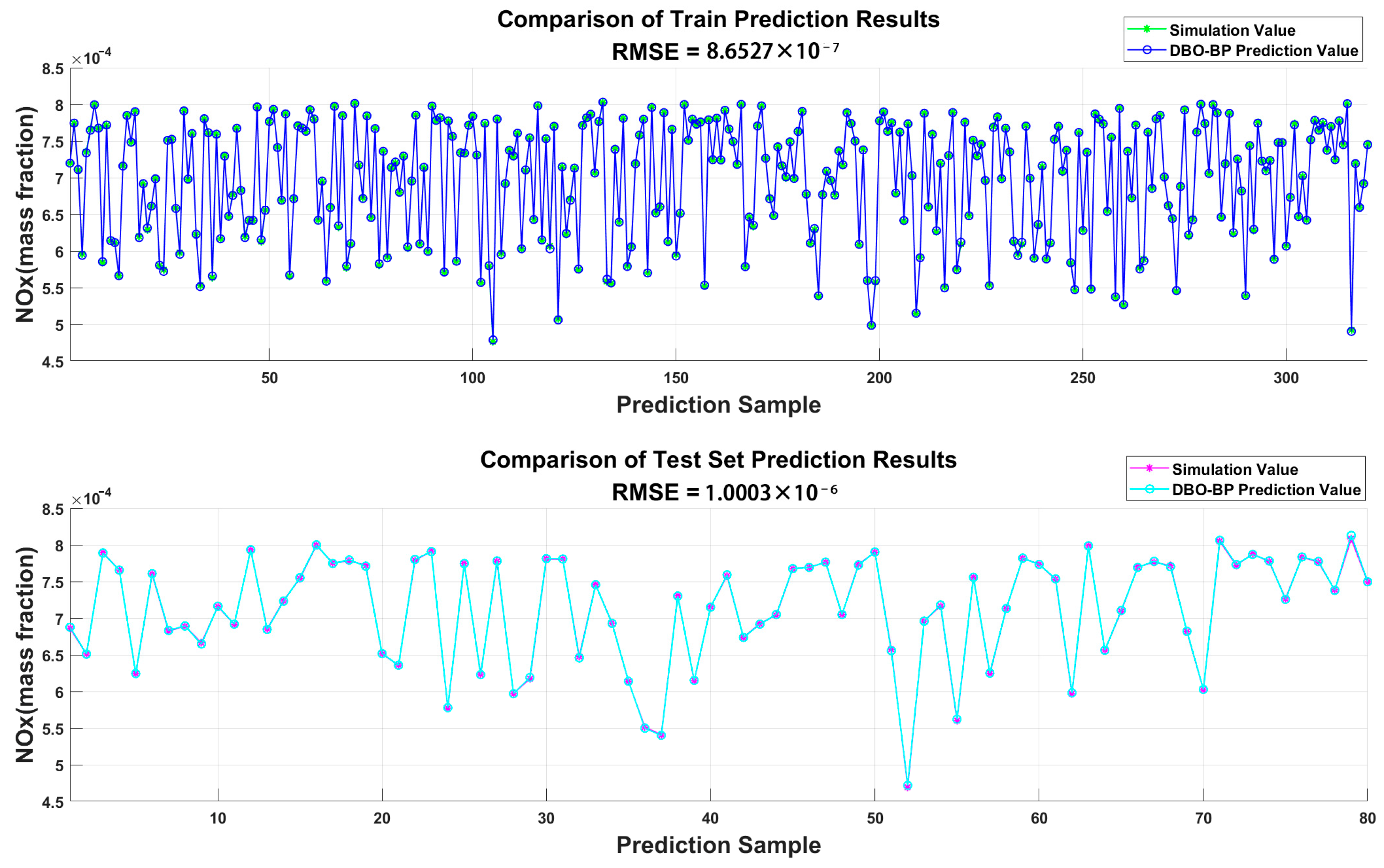
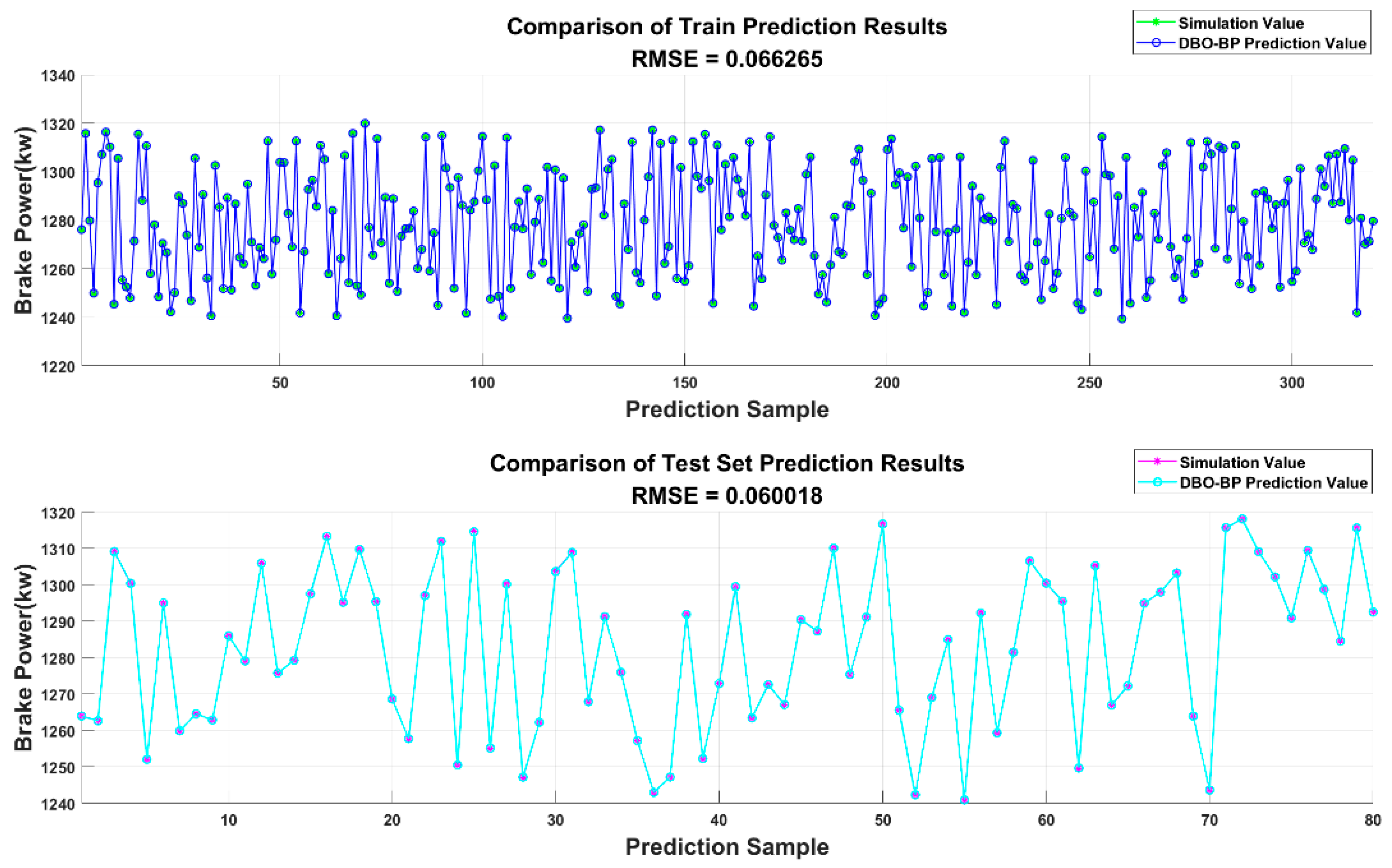
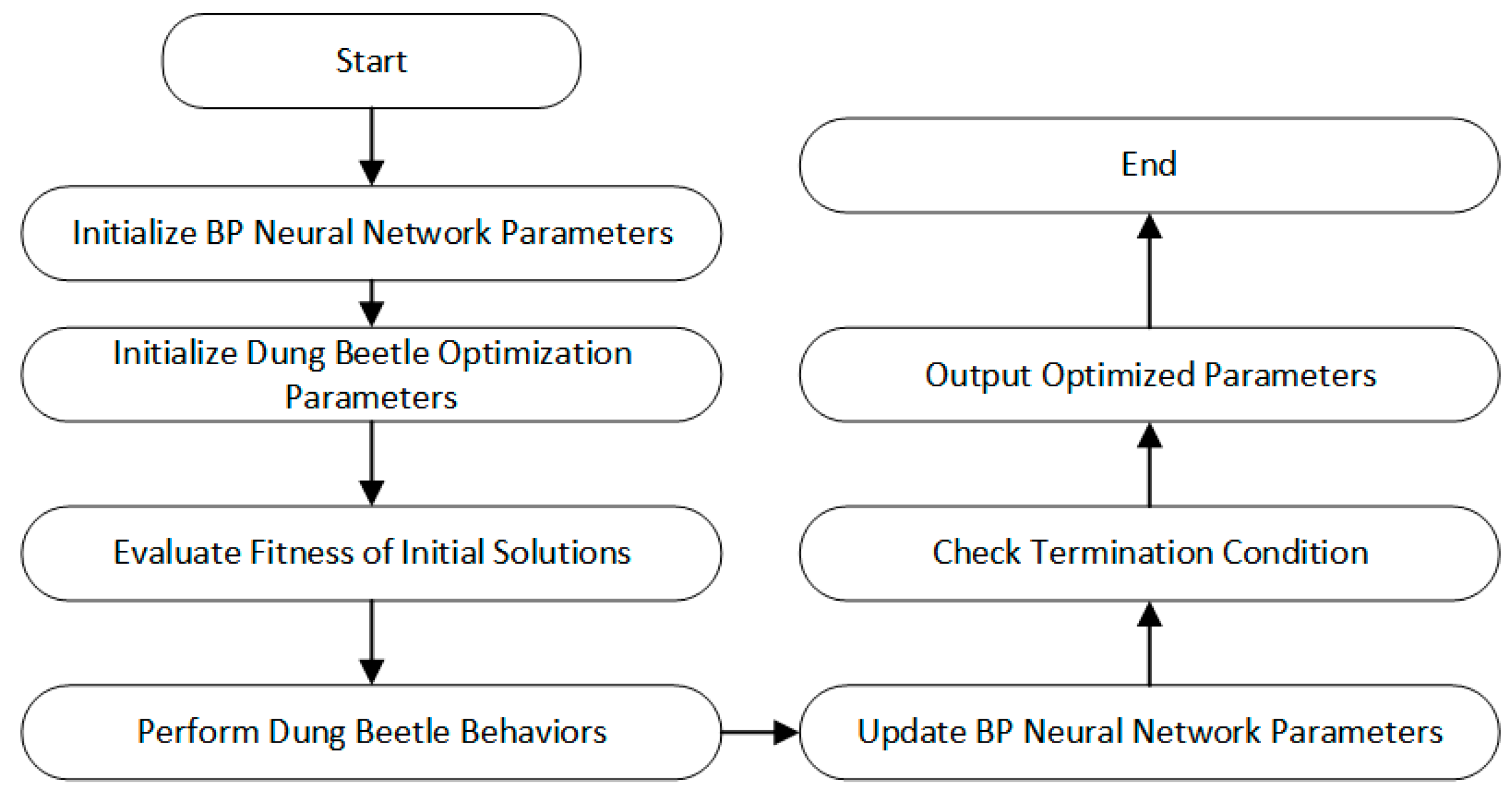
3.5.2. DBO Algorithm Combined with BPNN for Neural Network Model Prediction
4. Optimizing the Neural Network Prediction Model
4.1. Dung Beetle Optimizer
| Algorithm 1: Pseudocode for the DBO algorithm. |
| Require: The maximum iterations Tmax, the size of the particle’s population N. Ensure: Optimal position Xb and its fitness value fb. 1: Initialize the particle’s population i←1, 2, ……, N and define its relevant parameters 2: while (t ≤ Tmax) do 3: for i←1 to N do 4: if i == ball-rolling dung beetle then 5: δ = rand(1); 6: if δ < 0.9 then 7: Select α value by Algorithm 1; 8: Update the ball-rolling dung beetle’s position by using (1); 9: else 10: Update the ball-rolling dung beetle’s position by using (2); 11: end if 12: end if 13: if i == brood ball then 14: Update the brood ball’s position; 15: end if 16: if i == small dung beetle then 17: Update the small dung beetle’s position by using (6); 18: end if 19: if i == thief then 20: Update the position of the thief by using (7); 21: end if 22: end for 23: if the newly generated position is better than before then 24: Update it; 25: end if 26: t = t + 1; 27: end while 28: return Xb and its fitness value fb |
4.2. Neural Network Prediction Model Optimization Process
5. Multi-Objective Optimization
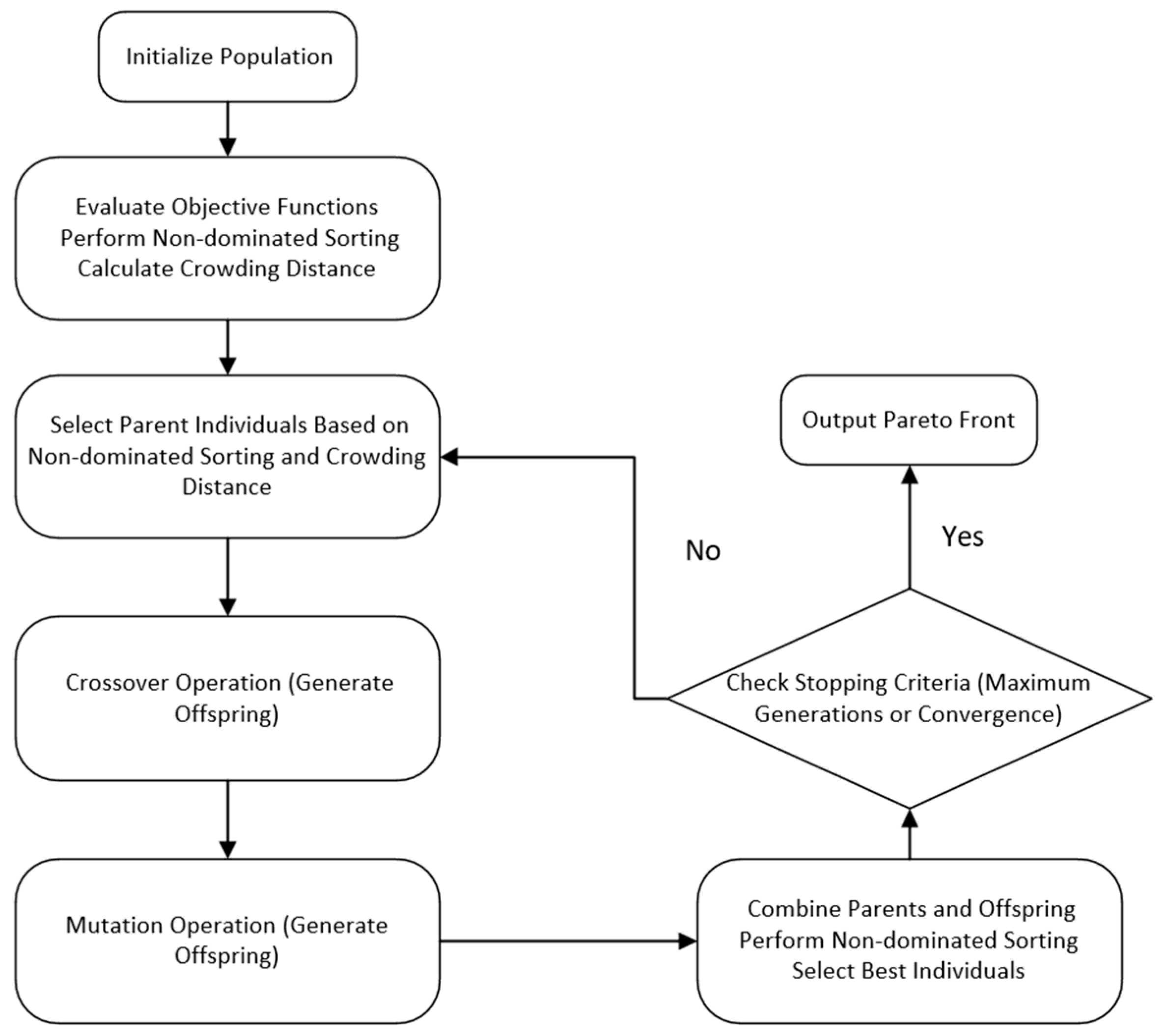
5.1. NSGA-Ⅱ (Non-Dominated Sorting Genetic Algorithm)
- (1)
- Establish an optimization model based on NSGA-II.
- (2)
- Set global variables: the population size N is set to 100, the maximum number of iterations is set to 20, and the mutation probability is set to 0.8. The termination condition is either reaching the maximum number of iterations or the algorithm convergence.
- (3)
- Randomly generate the three selected input variables (INJ, SOI, ICT) within their value ranges as the initial population P. Each individual in the initial population consists of the selected input variables.
- (4)
- Perform non-dominated sorting: for any two individuals xi and xj, determine if xi dominates xj, check if, for all objectives k, fk(xi) ≤ fk(xj) and at least one objective fk(xi) < fk(xj). Sort the entire population based on the dominance relation and divide the population into multiple non-dominated layers. Then, calculate the dominance degree of each individual and assign them to each dominance layer.
- (5)
- Compute the crowding distance: for each objective k, first, sort the solutions in the population based on their objective values, and then, calculate the crowding distance for each individual.
- (6)
- Select parent individuals through the selection operation. Generate new offspring individuals by crossover from the selected parents. The individuals selected in the selection operation undergo a mutation to generate new individuals.
- (7)
- Combine the parent and offspring populations. Use non-dominated sorting and crowding distance to select the top N optimal solutions and update the population.
- (8)
- Check the termination condition (either reaching the pre-set number of iterations or little improvement in the population). If met, stop the algorithm and return the Pareto optimal solution set.
5.2. Analysis of Optimization Results
5.3. Comparison and Analysis of the Neural Network Prediction Model and Optimal Results Under Different Altitude Conditions
6. Conclusions
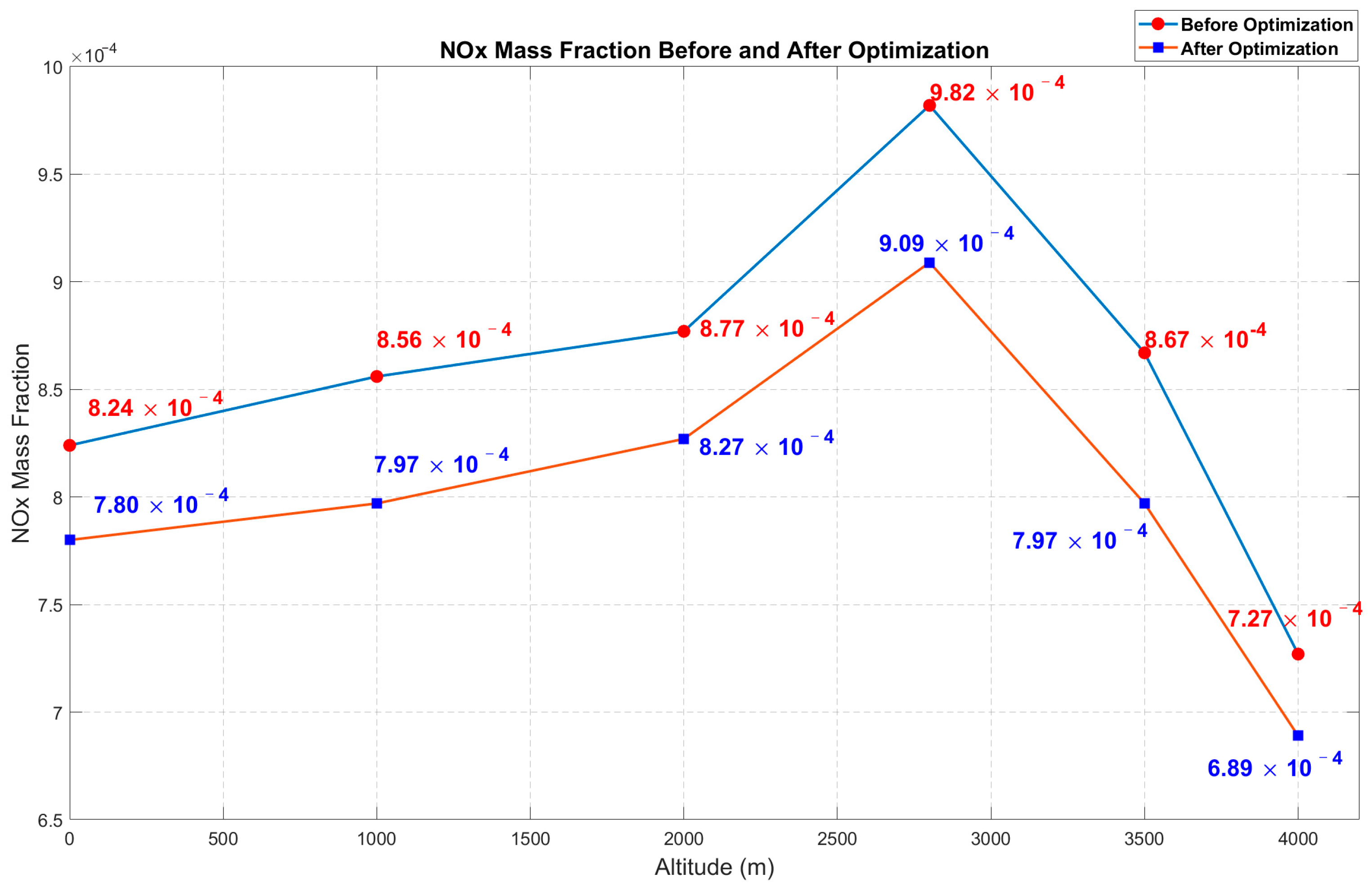
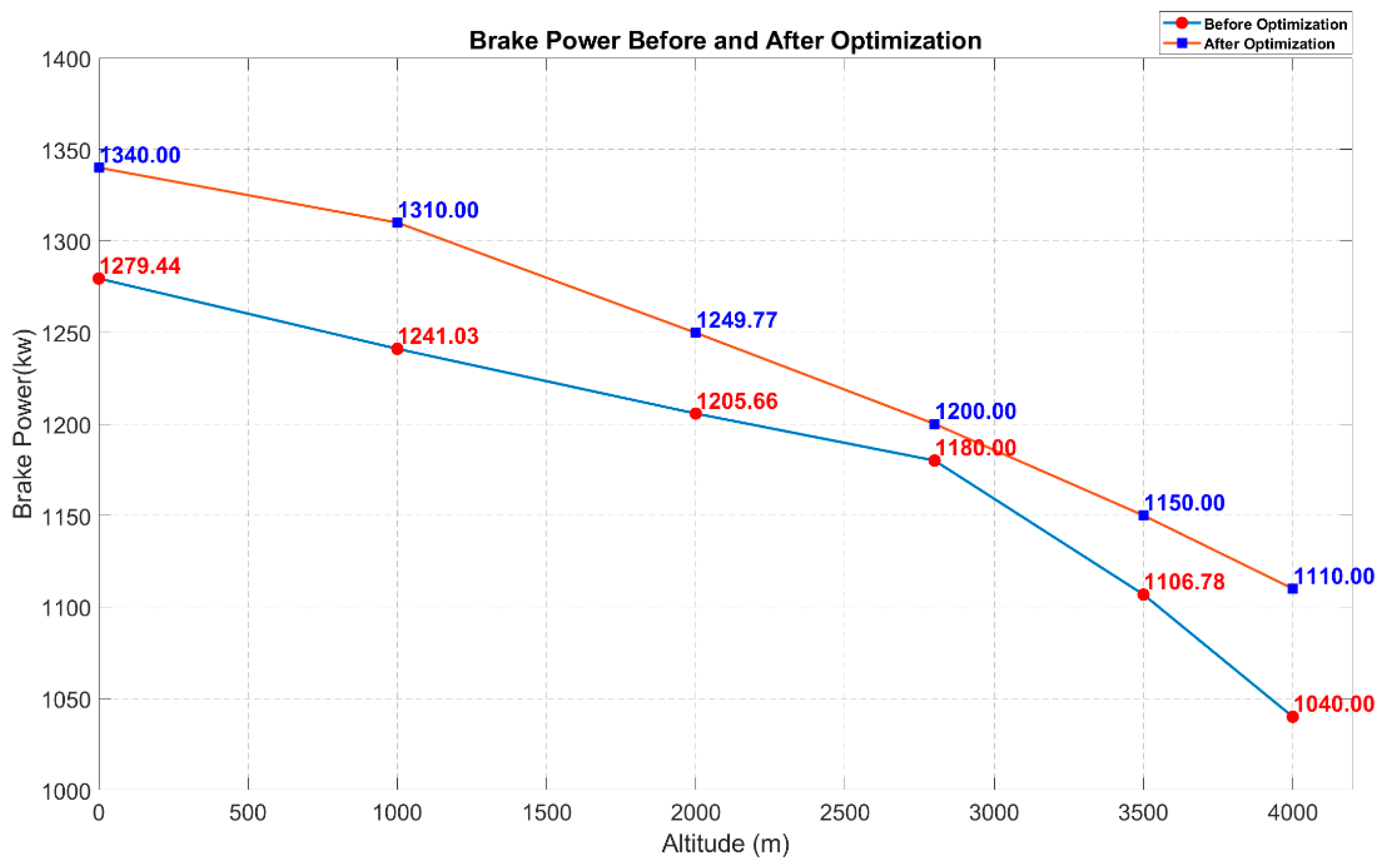
- (1)
- Impact of Altitude on Emissions and Power: As the altitude increases due to atmospheric pressure and temperature variations, the trends in diesel engine power and nitrogen oxide (NOx) emissions differ. NOx emissions initially increase and then decrease, while power consistently decreases with rising altitudes.
- (2)
- Engine Simulation and Coupled Modeling: In terms of engine simulation modeling and coupled simulation, the use of GT-Power combined with Matlab for co-simulation successfully constructed the diesel engine simulation model. This model provided the dataset necessary for the subsequent training of the neural network prediction model.
- (3)
- Optimization of Neural Network Algorithms: Based on neural network training, the DBO optimization algorithm was employed to enhance the prediction accuracy significantly. This optimization method is applied to engine optimization under varying altitude conditions for the first time, demonstrating its substantial potential. The DBO algorithm exhibits strong adaptability, effectively handling multiple parameter values for the diesel engine, improving model training, and enhancing prediction accuracy.
- (4)
- Multi-objective Optimization: The traditional NSGA-II algorithm was selected for multi-objective optimization, offering numerous advantages in diesel engine optimization. These include powerful multi-objective processing capabilities, the ability to handle complex constraints without pre-set objective weights, excellent global and local search performance, and efficient computational ability. With extensive engineering application experience, the NSGA-II algorithm achieved a good balance during the optimization process, significantly improving the diesel engine’s performance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, Y.; Du, Y.; Yan, Q. Challenges of, Progress in, and Prospects of Ultra-Long Deep Tunnels in the Extremely Complex Environment of the Qinghai–Tibet Plateau. Engineering, 2024; in press. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, L.; Zhu, G. Effects of transport infrastructures and climate change on ecosystem services in the integrated transport corridor region of the Qinghai-Tibet Plateau. Sci. Total Environ. 2023, 885, 163961. [Google Scholar] [CrossRef] [PubMed]
- Sha, A.; Ma, B.; Wang, H.; Hu, L.; Mao, X.; Zhi, X.; Chen, H.; Liu, Y.; Ma, F.; Liu, Z.; et al. Highway constructions on the Qinghai-Tibet Plateau: Challenge, research and practice. J. Road Eng. 2022, 2, 1–60. [Google Scholar] [CrossRef]
- Wang, Y. Research on the Application Strategy and Sustainable Development of the Qinghai-Tibet Railway from the Perspective of World Heritage Sites. Sci. Technol. Eng. Chem. Environ. Prot. 2024, 1, 1–7. [Google Scholar] [CrossRef]
- Chen, K.; Li, G.; Su, F.; Lu, J.; Dong, T.; Zhao, Y.; Yu, Q. Deformation causes of the Embankment-Bridge transition section in warm permafrost: The case study of a dry bridge along the Qinghai-Tibet railway. Eng. Fail. Anal. 2024, 163, 108476. [Google Scholar] [CrossRef]
- Liu, R.; Zhang, Z.; Zhou, G.; Dong, S. Research on Plateau Environmental Adaptability of Diesel Engines; Beijing Institute of Technology Press: Beijing, China, 2013. [Google Scholar]
- Dong, S.; Liu, Z.; Liu, R.; Zhou, G.; Zhang, Z.; Peng, Q. Combustion and performance characteristics of a diesel engine fueled with coal-based hybrid fuel at various altitudes. Int. J. Green Energy 2024, 21, 256–267. [Google Scholar] [CrossRef]
- Jia, G.; Tian, G.; Zhang, D. Effects of plateau environment on combustion and emission characteristics of a plateau high-pressure common-rail diesel engine with different blending ratios of biodiesel. Energies 2022, 15, 550. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, Q.; Zhang, F.; Liang, H.; Zhang, Y. Investigation of Effect of Nozzle Numbers on Diesel Engine Performance Operated at Plateau Environment. Sustainability 2023, 15, 8561. [Google Scholar] [CrossRef]
- Shi, Z.; Cao, W.; Wu, H.; Li, H.; Zhang, L.; Bo, Y.; Li, X. Research on destructive knock combustion mechanism of heavy-duty diesel engine at low temperatures. Combust. Sci. Technol. 2024, 196, 2896–2919. [Google Scholar] [CrossRef]
- Liang, F.; Diming, L.; Zhiyuan, H.; Piqiang, T.; Yunhua, Z.; Rong, Y. Study on the First-Firing-Cycle combustion characteristics of high-altitude and low-temperature environments during diesel engine cold start. Fuel 2022, 322, 124186. [Google Scholar] [CrossRef]
- Zheng, Y.M.; Xie, L.B.; Liu, D.Y.; Ji, J.L.; Li, S.F.; Zhao, L.L.; Zen, X.H. Emission Characteristics of Heavy-Duty Vehicle Diesel Engines at High Altitudes. J. Appl. Fluid Mech. 2023, 16, 2329–2343. [Google Scholar]
- Jiao, Y.; Liu, R.; Zhang, Z.; Yang, C.; Zhou, G.; Dong, S.; Liu, W. Comparison of combustion and emission characteristics of a diesel engine fueled with diesel and methanol-Fischer-Tropsch diesel-biodiesel-diesel blends at various altitudes. Fuel 2019, 243, 52–59. [Google Scholar] [CrossRef]
- Bhagat, R.N.; Sahu, K.B.; Ghadai, S.K.; Kumar, C.B. A review of performance and emissions of diesel engine operating on dual fuel mode with hydrogen as gaseous fuel. Int. J. Hydrogen Energy 2023, 48, 27394–27407. [Google Scholar] [CrossRef]
- Waly, M.S.; El-Seesy, A.I.; El-Batsh, H.M.; El-Zoheiry, R.M. Combustion and emissions characteristics of a diesel engine fuelled with diesel fuel and different concentrations of amino-functionalized multi-walled carbon nanotube. Atmos. Pollut. Res. 2023, 14, 101831. [Google Scholar] [CrossRef]
- El-Adawy, M. Effects of diesel-biodiesel fuel blends doped with zinc oxide nanoparticles on performance and combustion attributes of a diesel engine. Alex. Eng. J. 2023, 80, 269–281. [Google Scholar] [CrossRef]
- Lu, K.; Shi, L.; Zhang, H.; Chen, Z.; Deng, K. Theoretical and experimental study on performance improvement of diesel engines at different altitudes by adaptive regulation method of the two-stage turbocharging system. Energy 2023, 281, 128291. [Google Scholar] [CrossRef]
- Qi, F.; Li, C.; Miao, Z. Research and Application of Diesel Engine Turbocharging Technology in Plateau Environment. Adv. Comput. Eng. Technol. Res. 2024, 1, 441–447. [Google Scholar] [CrossRef]
- Peng, Q.; Liu, R.; Zhou, G.; Zhao, X.; Dong, S.; Zhang, Z. Study on Through-Flow Characteristics of a Diesel Two-Stage Supercharged Centrifugal Compressor under Variable-Altitude and Multiple Operating Conditions. Processes 2023, 12, 46. [Google Scholar] [CrossRef]
- Zhao, J.; Yang, R.; Yan, Y.; Ou, J.; Liu, Z.; Liu, J. Numerical Study on the Effect of Injector Nozzle Hole Number on Diesel Engine Performance Under Plateau Conditions; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2023. [Google Scholar]
- Lee, S.; Kim, C.; Lee, S.; Lee, J.; Kim, J. Diesel injector nozzle optimization for high CNG substitution in a dual-fuel heavy-duty diesel engine. Fuel 2020, 262, 116607. [Google Scholar] [CrossRef]
- He, Z.; Hu, B.; Wang, J.; Guo, G.; Feng, Z.; Wang, C.; Duan, L. The cavitation flow and spray characteristics of gasoline-diesel blends in the nozzle of a high-pressure common-rail injector. Fuel 2023, 350, 128786. [Google Scholar] [CrossRef]
- Wang, J.; Ma, Q.; Shi, M.; Jia, C.; Lin, J.; Wu, B. Optimization of combustion mechanisms and injection strategies for jet disturbance enhanced combustion in heavy-duty diesel engines. Fuel 2025, 381, 133459. [Google Scholar] [CrossRef]
- Pereira, J.L.J.; Oliver, G.A.; Francisco, M.B.; Cunha, S.S.; Gomes, G.F. A review of multi-objective optimization: Methods and algorithms in mechanical engineering problems. Arch. Comput. Methods Eng. 2022, 29, 2285–2308. [Google Scholar] [CrossRef]
- Park, S.; Kim, Y.; Woo, S.; Lee, K. Optimization and calibration strategy using design of experiment for a diesel engine. Appl. Therm. Eng. 2017, 123, 917–928. [Google Scholar] [CrossRef]
- Nikzadfar, K.; Shamekhi, A.H. Investigating a new model-based calibration procedure for optimizing the emissions and performance of a turbocharged diesel engine. Fuel 2019, 242, 455–469. [Google Scholar] [CrossRef]
- Belgiorno, G.; Di Blasio, G.; Beatrice, C. Parametric study and optimization of the main engine calibration parameters and compression ratio of a methane-diesel dual fuel engine. Fuel 2018, 222, 821–840. [Google Scholar] [CrossRef]
- Chaudhary, V.P.; Singh, M.K.; Lata, D.B. Optimization of performance and emission parameters of hydrogen enriched dual fuel diesel engine using response surface methodology. Int. J. Hydrogen Energy 2024, 79, 1100–1112. [Google Scholar] [CrossRef]
- Wu, T.; He, S.; Liu, J.; Sun, S.; Liu, K.; Han, Q.-L.; Tang, Y. A brief overview of ChatGPT: The history, status quo and potential future development. IEEE/CAA J. Autom. Sin. 2023, 10, 1122–1136. [Google Scholar] [CrossRef]
- Gao, S.; Ye, Y.; Tan, D.; Jia, G.; Zhang, B.; Liu, H.; Li, D.; Zhang, J.; Zhong, W.; Zhang, Z. Improvements of performance and emission characteristics of a diesel engine fueled with diesel/PODE3/n-butanol blended fuels by RSM-NSGA III in plateau environment. Process Saf. Environ. Prot. 2024, 185, 184–210. [Google Scholar] [CrossRef]
- Bertram, A.M.; Zhang, Q.; Kong, S.C. A novel particle swarm and genetic algorithm hybrid method for diesel engine performance optimization. Int. J. Engine Res. 2016, 17, 732–747. [Google Scholar] [CrossRef]
- Khalife, E.; Kaveh, M.; Younesi, A.; Balasubramanian, D.; Khanmohammadi, S.; Najafi, B. Comparative of various bio-inspired meta-heuristic optimization algorithms in performance and emissions of diesel engine fuelled with B5 containing water and cerium oxide additive blends. Int. J. Energy Res. 2022, 46, 21266–21280. [Google Scholar] [CrossRef]
- Wang, Y.; Li, J.; Wang, G.; Chen, G.; He, S. Prediction of diesel particulate filter regeneration conditions and diesel engine performance under regeneration mode using AMSO-BPNN and combined with XGBoost. Appl. Energy 2025, 377, 124341. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. Dung beetle optimizer: A new meta-heuristic algorithm for global optimization. J. Supercomput. 2023, 79, 7305–7336. [Google Scholar] [CrossRef]
- Srinivas, N.; Deb, K. Muiltiobjective optimization using nondominated sorting in genetic algorithms. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Engine Type | Four-Stroke Inline 6-Cylindere |
| Bore | 265 mm |
| Stroke | 300 mm |
| Intake Valve Opening | 47° CA |
| Intake Valve Closing | 39.3° CA |
| Peak Pressure Limit | 180 bar |
| Compression Ratio | 15.4 |
| Altitude (m) | Temperature (K) | Pressure (hPa) |
|---|---|---|
| 0 m (Sea Level) | 288.15 | 1013.25 |
| 1000 m | 281.65 | 899.8 |
| 2000 m | 275.15 | 794.9 |
| 2800 m | 270.0 | 705.5 |
| 3500 m | 265.4 | 657.6 |
| 4000 m | 267.15 | 611.3 |
| 5 Neuron | 10 Neuron | 20 Neuron | 30 Neuron | |
|---|---|---|---|---|
| Training Time | 53.37 s | 75.67 s | 102.29 | 183.85 |
| R2 | 90.99 | 98.99 | 97.59 | 98.89 |
| Altitude (m) | R2 of the NOx Training Set | R2 of the NOx Test Set | MAE of NOx Training Set | MAE of NOx Test Set |
|---|---|---|---|---|
| 0 m (Sea Level) | 0.9861 | 0.9812 | 5.78 × 10−8 | 6.66 × 10−8 |
| 1000 m | 0.9799 | 0.9697 | 6.38 × 10−8 | 5.80 × 10−8 |
| 2000 m | 0.9688 | 0.9754 | 9.38 × 10−8 | 7.40 × 10−8 |
| 2800 m | 0.9696 | 0.9596 | 8.13 × 10−6 | 3.17 × 10−6 |
| 3500 m | 0.9433 | 0.9855 | 9.65 × 10−8 | 8.83 × 10−8 |
| 4000 m | 0.9812 | 0.9864 | 4.88 × 10−8 | 9.28 × 10−8 |
| Altitude (m) | R2 of the Power Training Set | R2 of the Power Test Set | MAE of Power Training Set | MAE of Power Test Set |
|---|---|---|---|---|
| 0 m (Sea Level) | 0.9756 | 0.9885 | 1.49 | 1.1634 |
| 1000 m | 0.9861 | 0.9798 | 0.4731 | 2.2233 |
| 2000 m | 0.9985 | 0.9645 | 2.3484 | 3.8874 |
| 2800 m | 0.9189 | 0.9453 | 1.54 | 1.2666 |
| 3500 m | 0.9413 | 0.9878 | 3.5874 | 4.2673 |
| 4000 m | 0.9854 | 0.9742 | 7.76 × 10−8 | 6.26 × 10−8 |
| Altitude (m) | INJ (mg) | SOI (°) | ICT (K) | Brake Power (kw) | NOx (Mass Fraction) |
|---|---|---|---|---|---|
| 0 m (Sea Level) | 1759.63 | −13 | 320.58 | 1340.00 | 7.80 × 10−4 |
| 1000 m | 1689.02 | −12.5 | 340.72 | 1310.00 | 7.97 × 10−4 |
| 2000 m | 1757.85 | −13.6 | 330.59 | 1249.77 | 8.27 × 10−4 |
| 2800 m | 1587.88 | −14.7 | 335.88 | 1200.00 | 9.09 × 10−4 |
| 3500 m | 1458.40 | −14.0 | 337.65 | 1150.00 | 7.97 × 10−4 |
| 4000 m | 1666.55 | −15.6 | 338.74 | 1110.00 | 6.89 × 10−4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, A.; Liu, L.; Zhao, C.; Guan, Y. Neural Network Prediction of Locomotive Engine Parameters Based on the Dung Beetle Optimization Algorithm and Multi-Objective Optimization of Engine Operating Parameters. Sensors 2025, 25, 677. https://doi.org/10.3390/s25030677
Dong A, Liu L, Zhao C, Guan Y. Neural Network Prediction of Locomotive Engine Parameters Based on the Dung Beetle Optimization Algorithm and Multi-Objective Optimization of Engine Operating Parameters. Sensors. 2025; 25(3):677. https://doi.org/10.3390/s25030677
Chicago/Turabian StyleDong, Aiqi, Lijuan Liu, Chunce Zhao, and Ying Guan. 2025. "Neural Network Prediction of Locomotive Engine Parameters Based on the Dung Beetle Optimization Algorithm and Multi-Objective Optimization of Engine Operating Parameters" Sensors 25, no. 3: 677. https://doi.org/10.3390/s25030677
APA StyleDong, A., Liu, L., Zhao, C., & Guan, Y. (2025). Neural Network Prediction of Locomotive Engine Parameters Based on the Dung Beetle Optimization Algorithm and Multi-Objective Optimization of Engine Operating Parameters. Sensors, 25(3), 677. https://doi.org/10.3390/s25030677