
Tilting Pad Thrust Bearing Fault Diagnosis Based on Acoustic Emission Signal and Modified Multi-Feature Fusion Convolutional Neural Network

Abstract
:1. Introduction
- The majority of studies employing CNN have predominantly focused on the fault diagnosis of gears, gearboxes, rolling bearings, and electric motors. There is a notable lack of research addressing plain bearings, especially tilting pad thrust bearings;
- Despite the growing emphasis on AE signals and DL techniques, research that integrates AE signals with DL methods for intelligent machinery diagnosis has predominantly concentrated on components such as pipelines, gears, and rolling bearings, with insufficient relevant research applied to the field of plain bearings.
- Tilting pad thrust bearings are investigated as subjects of research, utilizing signals that simulate operational scenarios for fault diagnosis;
- AE signals are employed as a substitute for traditional vibration signals. The raw AE signals are converted into grayscale maps, which serve as inputs for the CNN;
- An enhanced multi-feature fusion CNN model is proposed, demonstrating recognition accuracy for AE signals derived from tilting pad thrust bearings across various operational conditions.
2. Proposed Intelligent Fault Diagnosis Method
2.1. Construction of the MMFCNN
2.2. Model Parameters
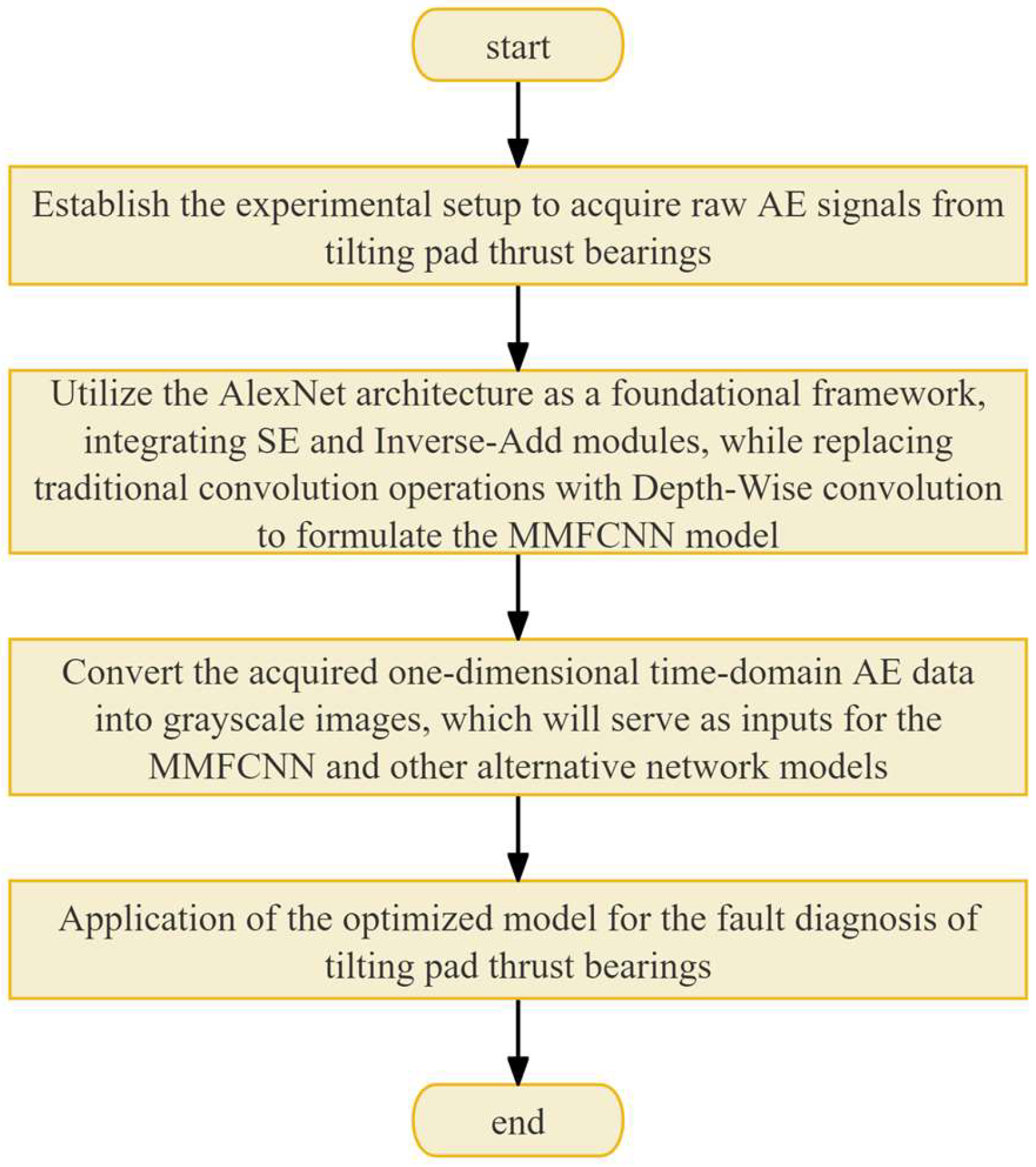
2.3. Implementation of the Proposed Method
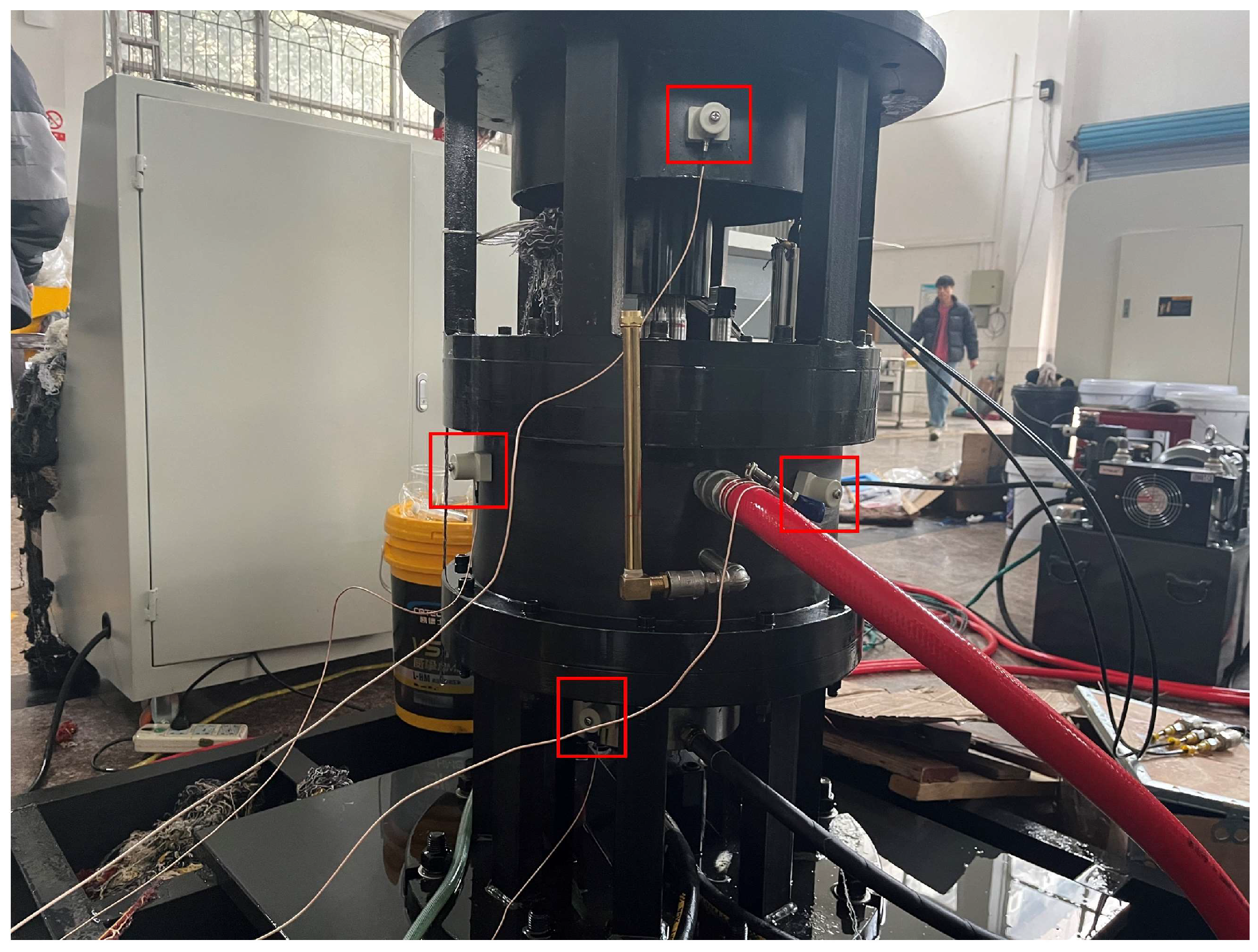
- Establish the experimental setup to acquire raw AE signals from tilting pad thrust bearings;
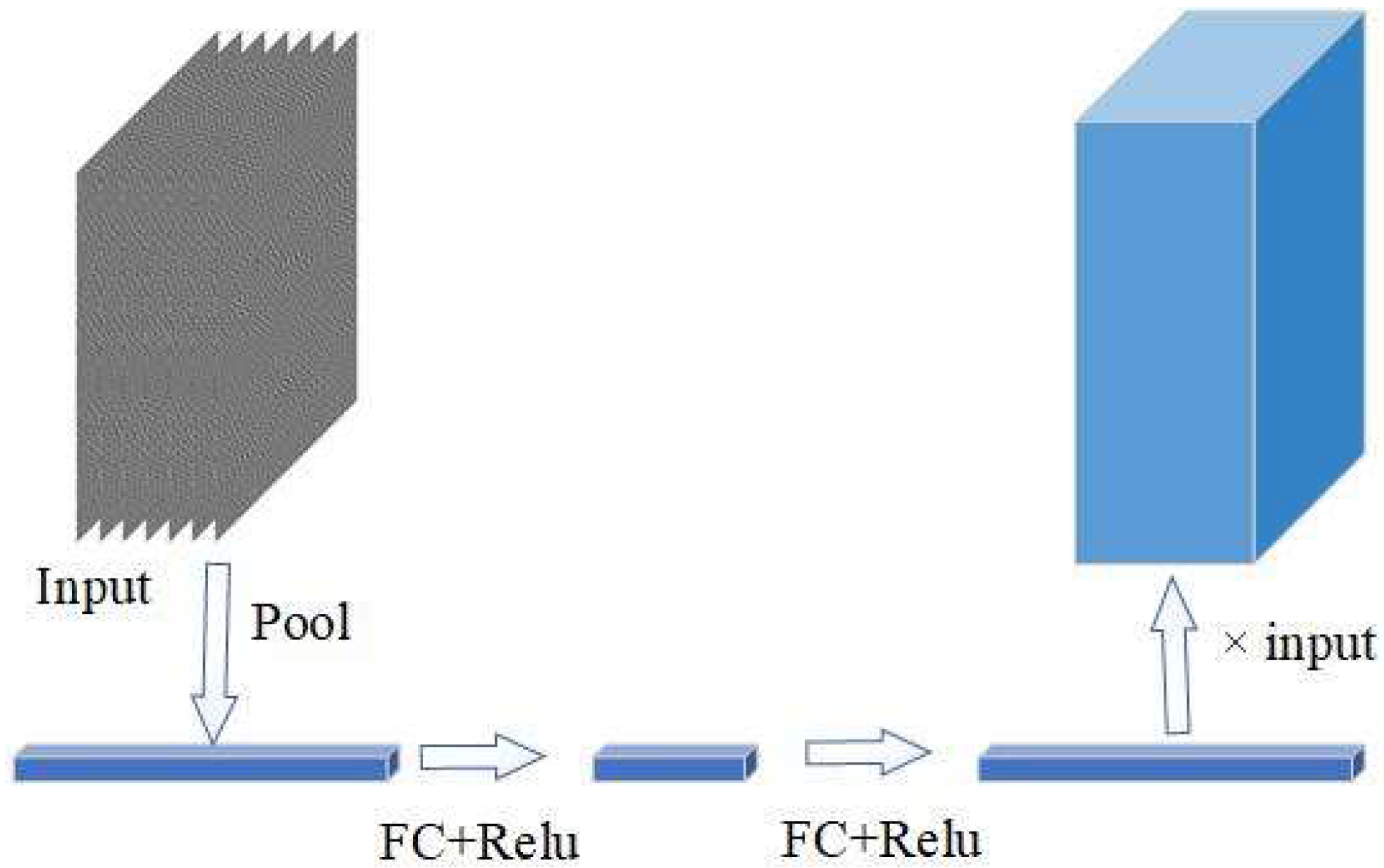
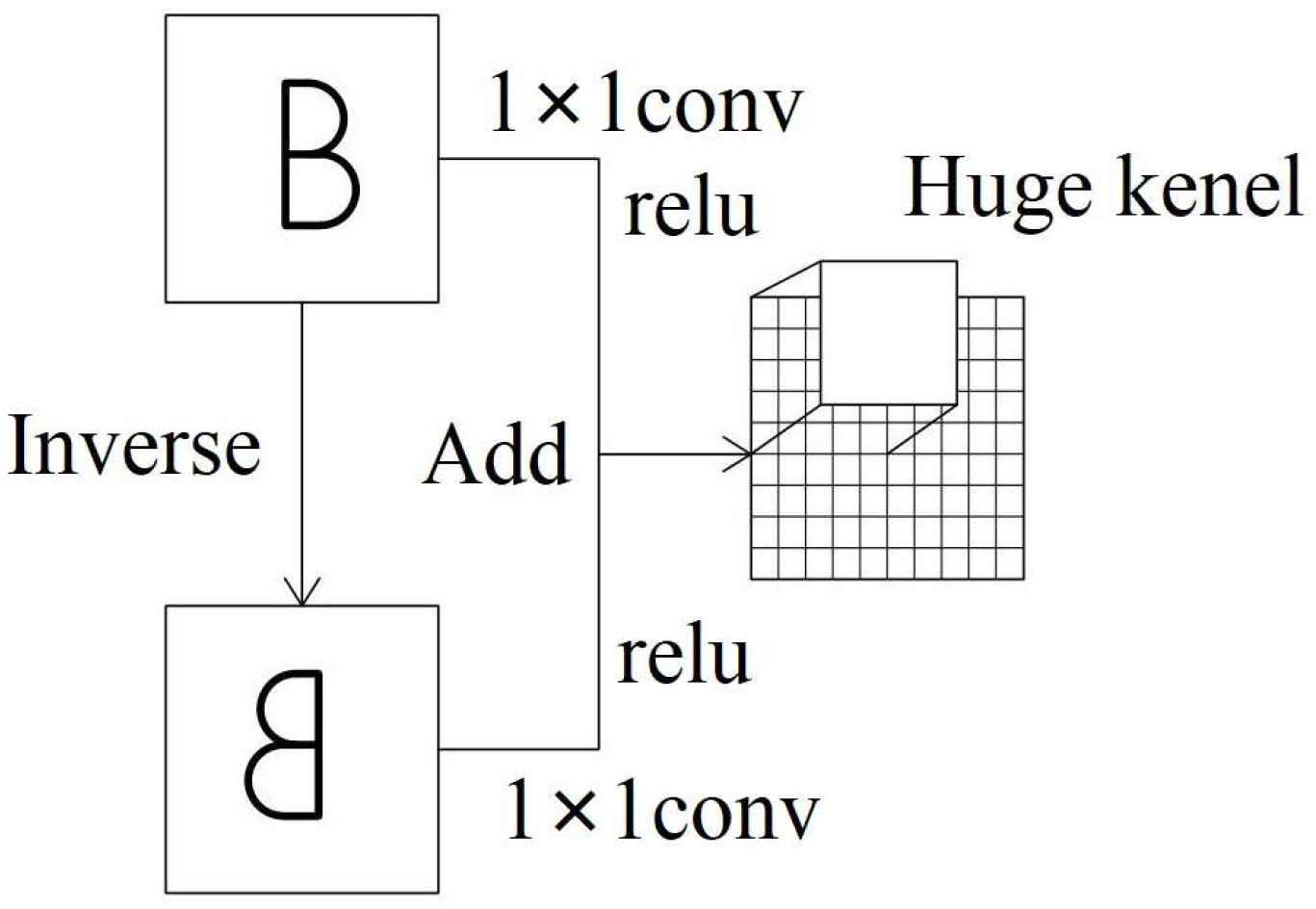
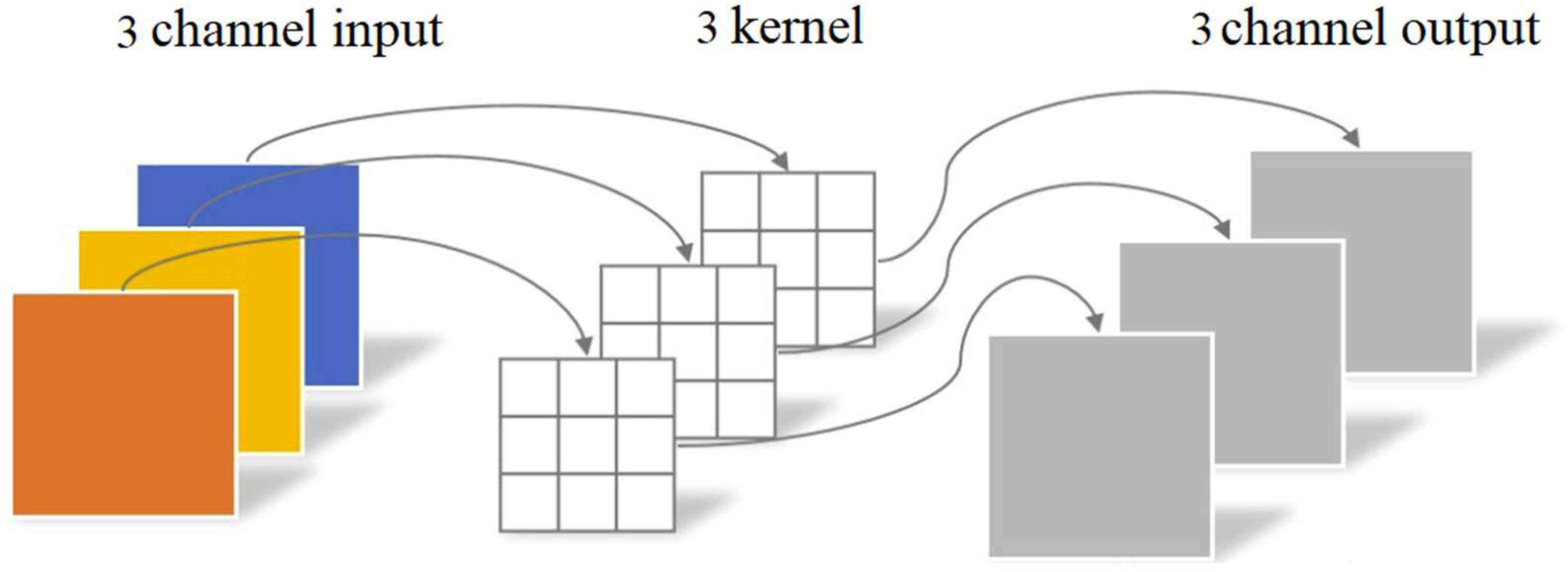
- Utilize the AlexNet architecture as a foundational framework, integrating SE and inverse-add modules, while replacing traditional convolution operations with depth-wise convolution to formulate the MMFCNN model;
- Convert the acquired one-dimensional time-domain AE data into grayscale images, which will serve as inputs for the MMFCNN and other alternative network models;
- Application of the optimized model for the fault diagnosis of tilting pad thrust bearings.
3. Experimental Data Collection
3.1. The Test Bench of the Tilting Pad Thrust Bearing
3.2. Data Acquisition
4. Tilting Pad Thrust Bearing Fault Diagnosis Based on MMFCNN
4.1. Data Preprocessing
4.2. Multi-Feature Fusion of Data
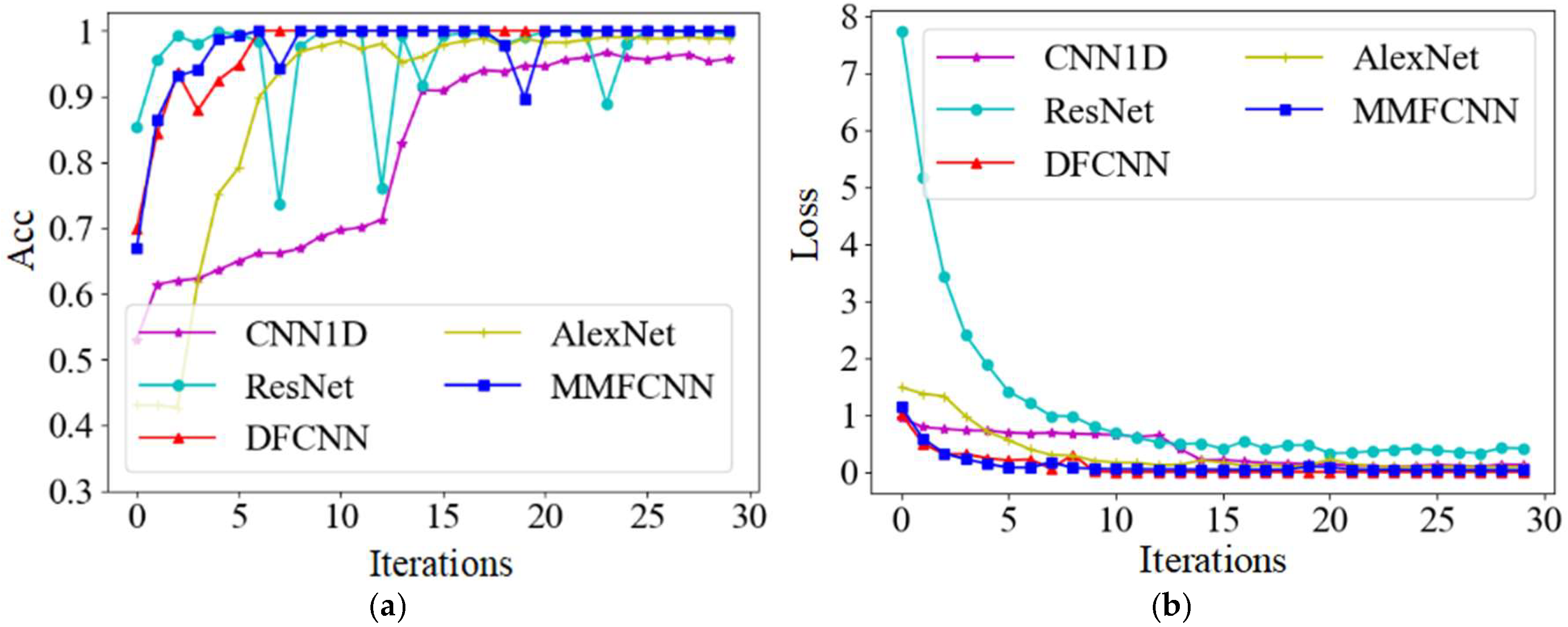
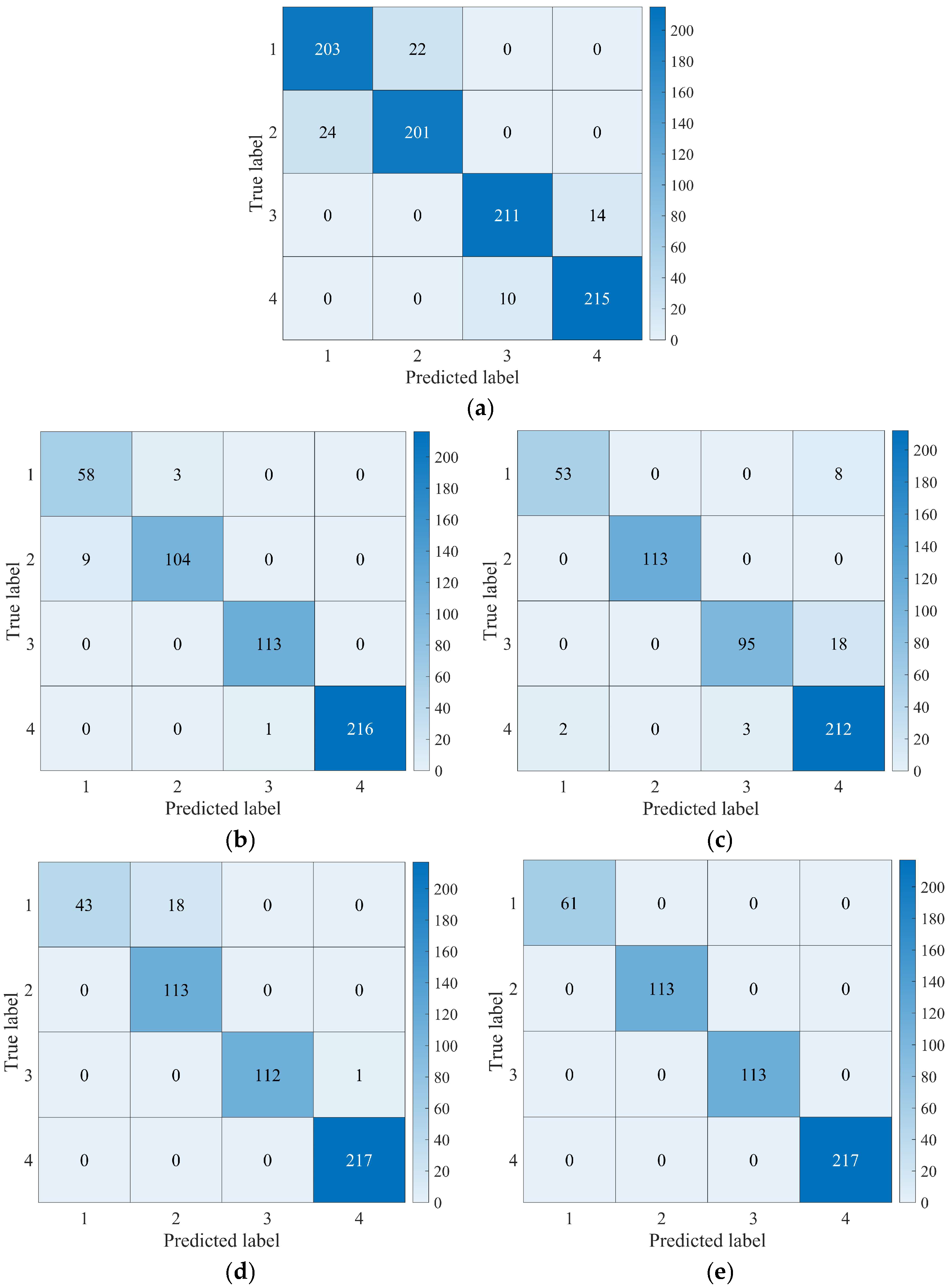
4.3. Comparison of the Performance of Different Networks
4.4. Visualisation of the Model Learning Process
4.4.1. t-Sne Visualization
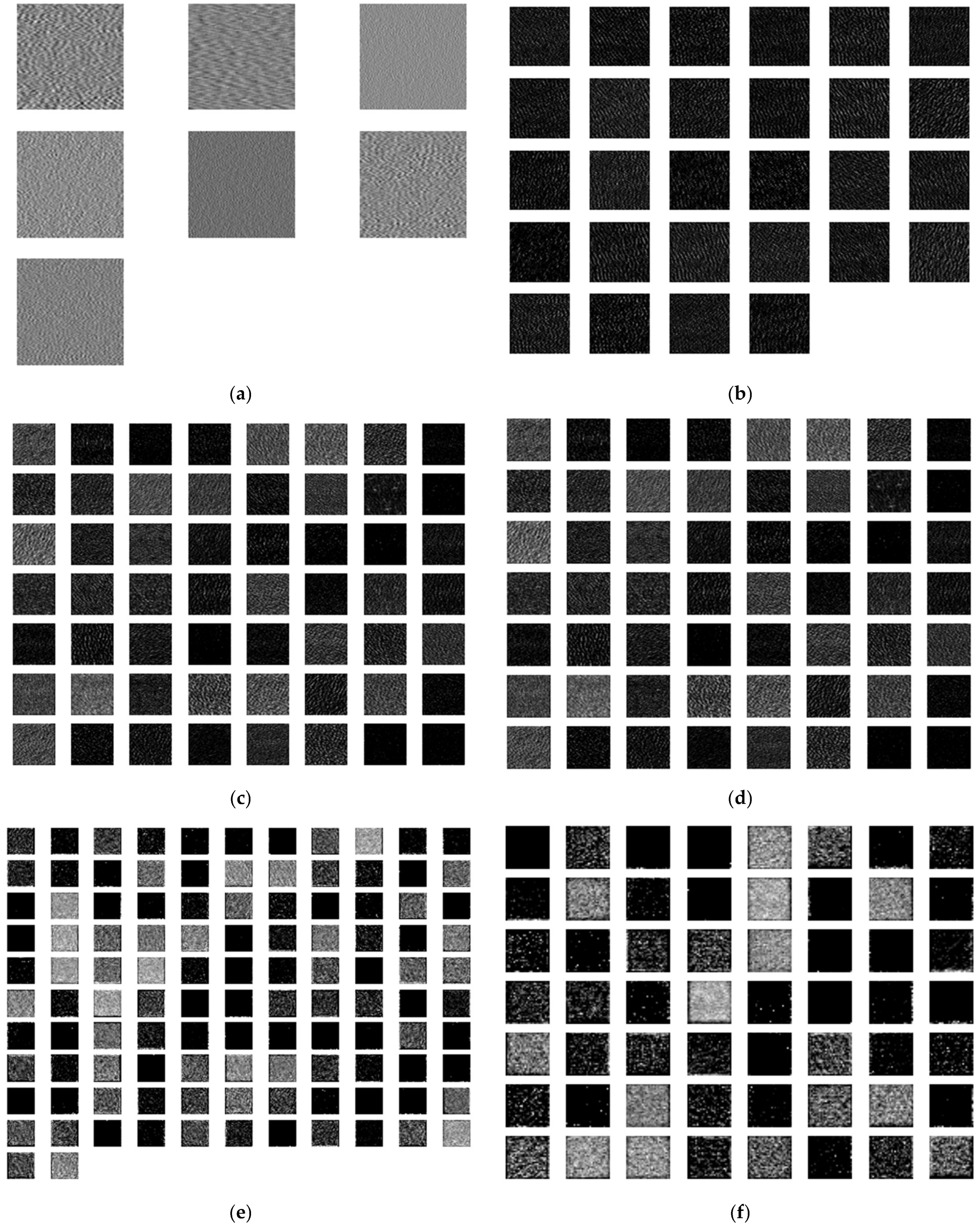
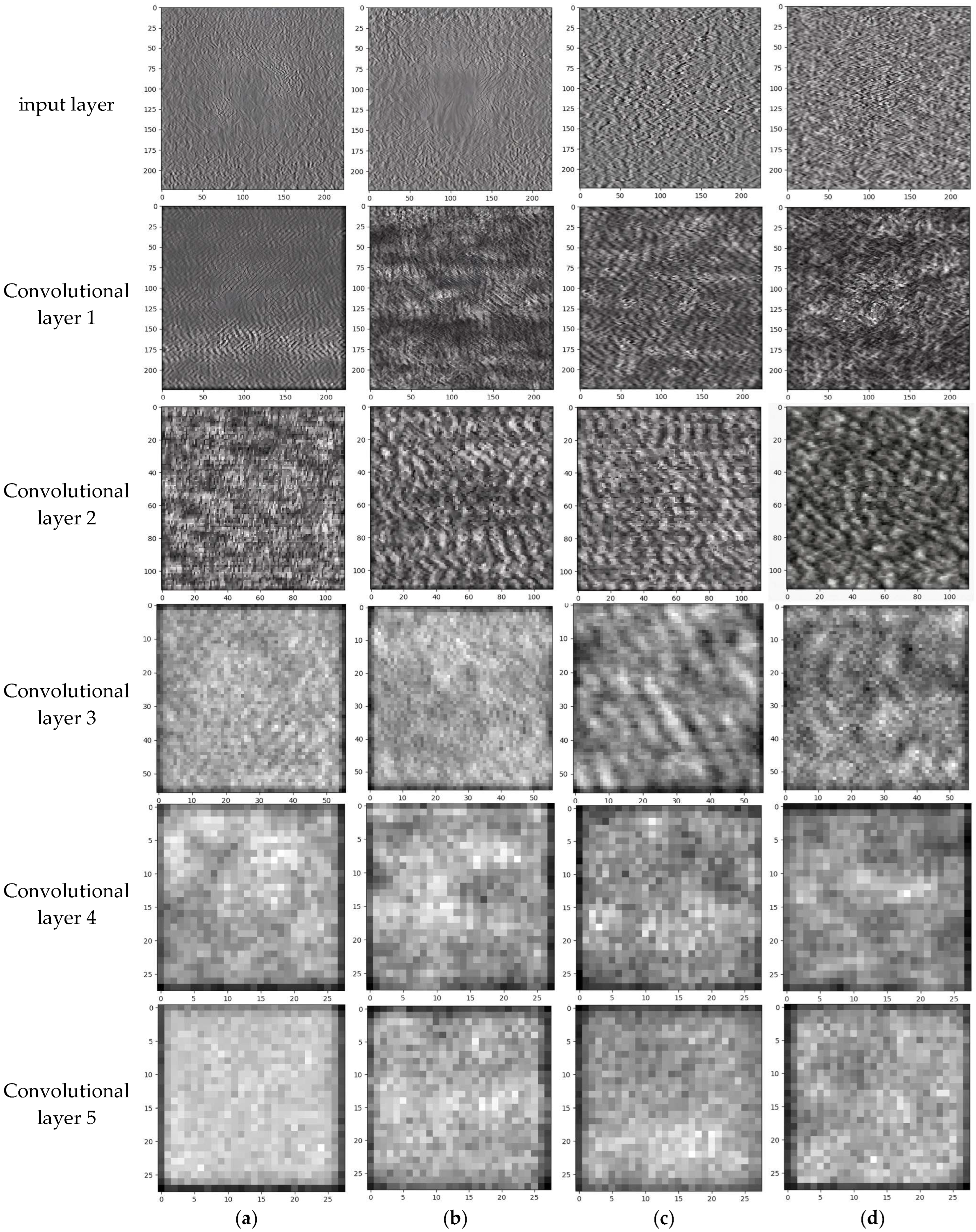
4.4.2. Classification Process Feature Map Visualization
5. Conclusions
- (1)
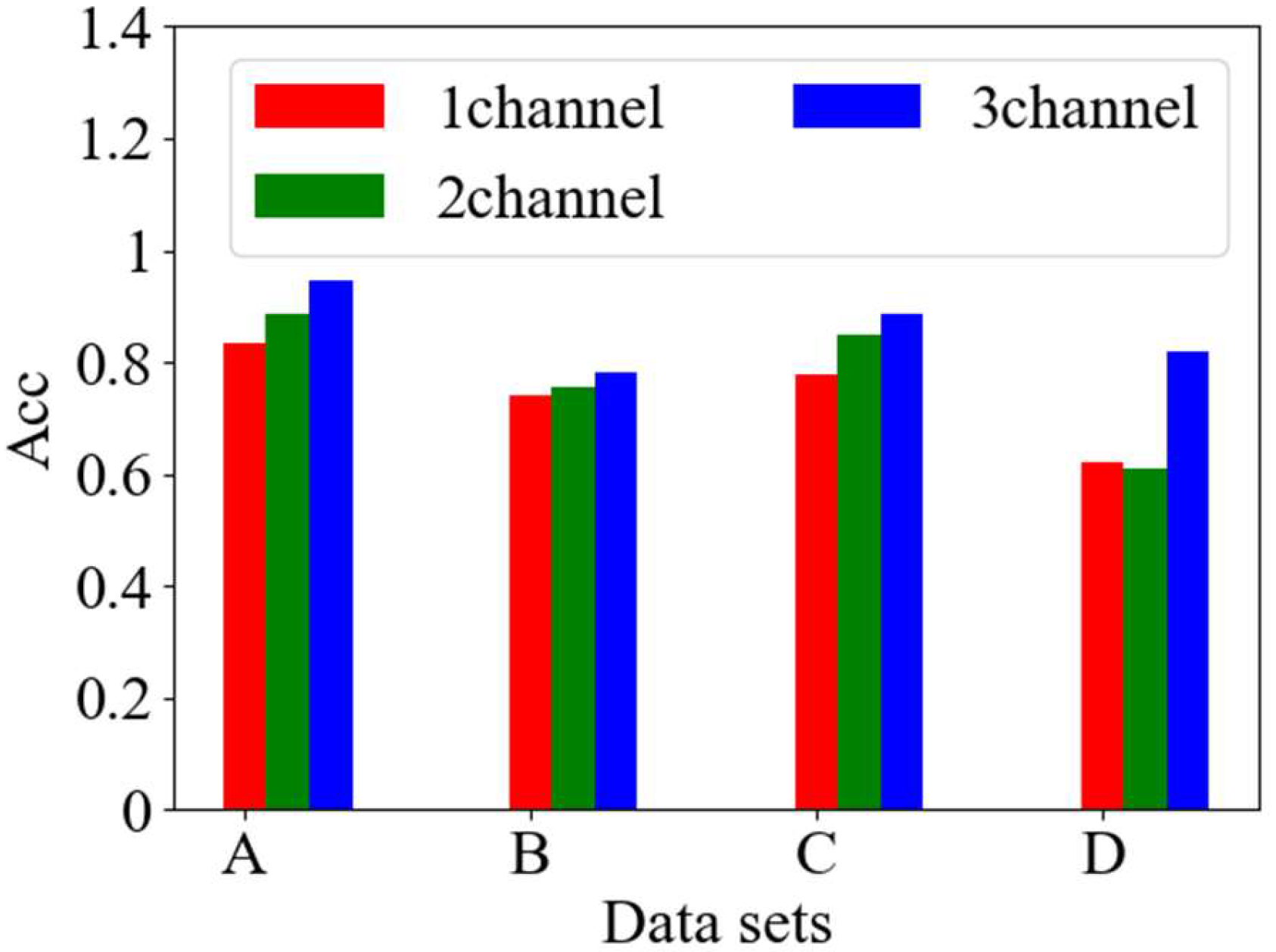
- A multi-feature fusion convolutional neural network (MMFCNN) is proposed in this study. The network comprises three feature extraction channels aimed at capturing dataset features from diverse perspectives. Subsequent to feature extraction, fusion from the depth direction is achieved through feature splicing after the pooling layer. Comparative analysis is conducted on models with varying numbers of channels, revealing that the inclusion of both auxiliary channels simultaneously leads to improved results across different datasets.
- (2)
- Focusing on the AE signals from four states of tilting pad thrust bearings, the proposed MMFCNN network model is compared and tested against traditional network models such as CNN1D, ResNet, DFCNN, and AlexNet. The diagnostic performance of the models is evaluated based on criteria including recognition rates during training and validation stages, stability, convergence speed, and accuracy on the test set. Experimental results demonstrate that the MMFCNN outperforms other models across all metrics, achieving an average test set accuracy of 99.58%.
- (3)
- To investigate the impact of rotational speed and load variations on the AE signals of tilting pad thrust bearings, experiments were conducted by altering the rotational speed and load while maintaining a constant ambient temperature. A dataset comprising nine data types from four states of tilting pad thrust bearings was collected for analysis. The proposed model was compared with CNN1D, ResNet, and DFCNN models using this dataset. Results indicate that even with the dataset expansion, MMFCNN continues to exhibit superior performance compared to the other models.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xia, X.; Zhou, J.; Li, C.; Zhu, W. A novel method for fault diagnosis of hydro generator based on NOFRFs. Int. J. Electr. Power Energy Syst. 2015, 71, 60–67. [Google Scholar] [CrossRef]
- Wang, T.; Liang, M.; Li, J.; Cheng, W.; Li, C. Bearing fault diagnosis under unknown variable speed via gear noise cancellation and rotational order sideband identification. Mech. Syst. Signal Process. 2015, 62–63, 30–53. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, J. Multi-fault diagnosis for rolling element bearings based on ensemble empirical mode decomposition and optimized support vector machines. Mech. Syst. Signal Process. 2013, 41, 127–140. [Google Scholar] [CrossRef]
- Mao, W.; He, L.; Yan, Y.; Wang, J. Online sequential prediction of bearings imbalanced fault diagnosis by extreme learning machine. Mech. Syst. Signal Process. 2017, 83, 450–473. [Google Scholar] [CrossRef]
- Gao, S.; Xu, L.; Zhang, Y.; Pei, Z. Rolling bearing fault diagnosis based on intelligent optimized self-adaptive deep belief network. Meas. Sci. Technol. 2020, 31, 055009. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, Q.; Chen, H.; Chu, X. A deformable CNN-DLSTM based transfer learning method for fault diagnosis of rolling bearing under multiple working conditions. Int. J. Prod. Res. 2021, 59, 4811–4825. [Google Scholar] [CrossRef]
- Ince, T.; Kiranyaz, S.; Eren, L.; Askar, M.; Gabbouj, M. Real-time motor fault detection by 1-D convolutional neural networks. IEEE Trans. Ind. Electron. 2016, 63, 7067–7075. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhang, H.; Liang, T. Electric locomotive bearing fault diagnosis using a novel convolutional deep belief network. IEEE Trans. Ind. Electron. 2017, 65, 2727–2736. [Google Scholar] [CrossRef]
- Zhang, X.; Miao, Q.; Zhang, H.; Wang, L. A parameter-adaptive VMD method based on grasshopper optimization algorithm to analyze vibration signals from rotating machinery. Mech. Syst. Signal Process. 2018, 108, 58–72. [Google Scholar] [CrossRef]
- Hui, Y.; Mei, X.; Jiang, G.; Tao, T.; Pei, C.; Ma, Z. Milling tool wear state recognition by vibration signal using a stacked generalization ensemble model. Shock Vib. 2019, 2019, 7386523. [Google Scholar] [CrossRef]
- Chen, J.; Zhou, D.; Lyu, C.; Lu, C. An integrated method based on CEEMD-SampEn and the correlation analysis algorithm for the fault diagnosis of a gearbox under different working conditions. Mech. Syst. Signal Process. 2018, 113, 102–111. [Google Scholar] [CrossRef]
- Yan, X.; Liu, Y.; Jia, M. A fault diagnosis approach for rolling bearing integrated SGMD, IMSDE and multiclass relevance vector machine. Sensors 2020, 20, 4352. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Wu, X.; Mao, J.; Liu, X. Acoustic emission signal processing for rolling bearing running state assessment using compressive sensing. Mech. Syst. Signal Process. 2017, 91, 395–406. [Google Scholar] [CrossRef]
- Pham, M.T.; Kim, J.M.; Kim, C.H. Rolling bearing fault diagnosis based on improved GAN and 2-D representation of acoustic emission signals. IEEE Access 2022, 10, 78056–78069. [Google Scholar] [CrossRef]
- Nienhaus, K.; Boos, F.D.; Garate, K.; Baltes, R. Development of acoustic emission (AE) based defect parameters for slow rotating roller bearings. J. Phys. Conf. Ser. 2012, 364, 012034. [Google Scholar] [CrossRef]
- He, Y.; Zhang, X. Approximate entropy analysis of the acoustic emission from defects in rolling element bearings. J. Vib. Acoust. 2012, 134, 061012. [Google Scholar] [CrossRef]
- Li, H.; Wen, X.; Shu, N.; Pei, C. Application of acoustic emission technology on automation detection of polluted insulator. In Proceedings of the 2009 International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 2378–2382. [Google Scholar]
- He, Y.; Li, M.; Meng, Z.; Chen, S.; Huang, S.; Hu, Y.; Zou, X. An overview of acoustic emission inspection and monitoring technology in the key components of renewable energy systems. Mech. Syst. Signal Process. 2021, 148, 107146. [Google Scholar] [CrossRef]
- Park, J.M.; Kim, Y.M.; Kim, K.W.; Yoon, D.J. Interfacial aspects of electrodeposited carbon fiber-reinforced epoxy composites using monomeric and polymeric coupling agents. J. Colloid Interface Sci. 2000, 231, 114–128. [Google Scholar] [CrossRef]
- Mba, D.; Rao, R.B.K.N. Development of acoustic emission technology for condition monitoring and diagnosis of rotating machines: Bearings, pumps, gearboxes, engines, and rotating structures. Shock Vib. Dig. 2006, 37, 5. [Google Scholar] [CrossRef]
- Joo, Y.S.; Lim, S.H.; Eom, H.S.; Kim, J.H.; Jung, H.K. Acoustic Emission Technology and Application; U.S. Department of Energy: Oak Ridge, TN, USA, 2003.
- Saeedifar, M.; Zarouchas, D. Damage characterization of laminated composites using acoustic emission: A review. Compos. Part B Eng. 2020, 195, 108039. [Google Scholar] [CrossRef]
- Van Hecke, B.; He, D.; Qu, Y. On the use of spectral averaging of acoustic emission signals for bearing fault diagnostics. J. Vib. Acoust. 2014, 136, 061009. [Google Scholar] [CrossRef]
- He, Y.; Zhang, X.; Friswell, M.I. Defect diagnosis for rolling element bearings using acoustic emission. J. Vib. Acoust. 2009, 131, 061012. [Google Scholar] [CrossRef]
- Huang, Q.; Li, L.; Rao, H.; Jin, F.H.; Tang, Y.Q. The AE law of sliding bearings in rotating machinery and its application in fault diagnosis. In Challenges of Power Engineering and Environment, Proceedings of the International Conference on Power Engineering, Hangzhou, China, 23–27 October 2007; Springer: Berlin/Heidelberg, Germany, 2007; pp. 541–546. [Google Scholar]
- Huang, J.; Zhang, F.; Coombs, T.; Chu, F. The first-kind flexible tensor SVD: Innovations in multi-sensor data fusion processing. In Nonlinear Dynamics; Springer: Cham, Switzerland, 2024; pp. 1–19. [Google Scholar]
- Xu, H.; Wang, X.; Huang, J.; Zhang, F.; Chu, F. Semi-supervised multi-sensor information fusion tailored graph embedded low-rank tensor learning machine under extremely low labeled rate. Inf. Fusion 2024, 105, 102222. [Google Scholar] [CrossRef]
- Ma, H.; Li, J.; Huang, J.; Wang, R.; Ge, R.; Zhang, F. Adaptive Embedded Flexible Tensor Singular Spectrum Decomposition. Electronics 2024, 14, 21. [Google Scholar] [CrossRef]
- Hoang, D.T.; Kang, H.J. A survey on deep learning based bearing fault diagnosis. Neurocomputing 2019, 335, 327–335. [Google Scholar] [CrossRef]
- Guo, X.; Chen, L.; Shen, C. Hierarchical adaptive deep convolution neural network and its application to bearing fault diagnosis. Measurement 2016, 93, 490–502. [Google Scholar] [CrossRef]
- Xie, T.; Huang, X.; Choi, S.K. Intelligent mechanical fault diagnosis using multisensor fusion and convolution neural network. IEEE Trans. Ind. Inform. 2021, 18, 3213–3223. [Google Scholar] [CrossRef]
- Tang, S.; Zhu, Y.; Yuan, S. A novel adaptive convolutional neural network for fault diagnosis of hydraulic piston pump with acoustic images. Adv. Eng. Inform. 2022, 52, 101554. [Google Scholar] [CrossRef]
- Zhao, K.; Liu, Z.; Zhao, B.; Shao, H. Class-aware adversarial multiwavelet convolutional neural network for cross-domain fault diagnosis. IEEE Trans. Ind. Informatics 2023, 20, 4492–4503. [Google Scholar] [CrossRef]
- Liu, P.; Xu, C.; Xie, J.; Fu, M.; Chen, Y.; Liu, Z.; Zhang, Z. A CNN-based transfer learning method for leakage detection of pipeline under multiple working conditions with AE signals. Process Saf. Environ. Prot. 2023, 170, 1161–1172. [Google Scholar] [CrossRef]
- Li, X.; Li, J.; Qu, Y.; He, D. Gear pitting fault diagnosis using integrated CNN and GRU network with both vibration and acoustic emission signals. Appl. Sci. 2019, 9, 768. [Google Scholar] [CrossRef]
- Wang, X.; Xu, S.; Zhang, Y.; Tu, Y.; Peng, M. A Method for the Pattern Recognition of Acoustic Emission Signals Using Blind Source Separation and a CNN for Online Corrosion Monitoring in Pipelines with Interference from Flow-Induced Noise. Sensors 2024, 24, 5991. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.Y.; Kim, J.M. Bearing fault diagnosis using grad-CAM and acoustic emission signals. Appl. Sci. 2020, 10, 2050. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. In Proceedings of the Advances in Neural Information Processing Systems 25 (NIPS 2012), Lake Tahoe, NV, USA, 3–6 December 2012; Volume 25. [Google Scholar]
- Kiranyaz, S.; Ince, T.; Gabbouj, M. Real-time patient-specific ECG classification by 1-D convolutional neural networks. IEEE Trans. Biomed. Eng. 2015, 63, 664–675. [Google Scholar] [CrossRef] [PubMed]
- Xu, W.; Fu, Y.L.; Zhu, D. ResNet and its application to medical image processing: Research progress and challenges. Comput. Methods Programs Biomed. 2023, 240, 107660. [Google Scholar] [CrossRef] [PubMed]
- Bao, H.; Ming, D.; Guo, Y.; Zhang, K.; Zhou, K.; Du, S. DFCNN-based semantic recognition of urban functional zones by integrating remote sensing data and POI data. Remote Sens. 2020, 12, 1088. [Google Scholar] [CrossRef]
- Han, Y.; Tang, B.; Deng, L. An enhanced convolutional neural network with enlarged receptive fields for fault diagnosis of planetary gearboxes. Comput. Ind. 2019, 107, 50–58. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Type | Kernel Size | Stride | Channel |
|---|---|---|---|---|
| 0 | Input | - | - | 7 |
| 1 | Convolution 1 | 11, 2, 113 | 1, 2, 1 | 28, 14, 7 |
| 2 | Pooling | 2 | 2 | 28 |
| 3 | Convolution 2 | 5, 4, 57 | 1, 4, 1 | 56, 28, 7 |
| 4 | Pooling | 2 | 2 | 56 |
| 5 | Convolution 2 | 5, 8, 29 | 1, 8, 1 | 112, 56, 7 |
| 6 | Pooling | 2 | 2 | 112 |
| 7 | Convolution 3 | 3 | 1 | 112 |
| 8 | Convolution 4 | 3 | 1 | 56 |
| 9 | Fully connected | - | - | 2048 |
| 10 | Convolution 5 | - | - | 2048 |
| 11 | Fully connected | - | - | 4 |
| Group | Fault Type | Fault Description |
|---|---|---|
| 1 | Normal | Damage-free |
| 2 | Burned | Burned after start/stop with load |
| 3 | 2 mm scratched | Processed with 2 mm scratches manually |
| 4 | 3 mm scratched | Processed with 3 mm scratches manually |
| Data Set | Load/kN | Temperature/°C | Speed/rpm | Fault Type |
|---|---|---|---|---|
| A | 16.7 | 60 | 2970 | Normal, Burned, 2 mm scratched, 3 mm scratched |
| B | 11.5–20 | 65 | 1485 | 2 mm scratched |
| C | 16.7 | 45–60 | 2970 | 3 mm scratched |
| D | A, B, C | |||
| Test Model | Average Accuracy (%) | Standard Deviation | Average Computation Time (s) |
|---|---|---|---|
| CNN1D | 92.22 | 0.6241 | 358 |
| ResNet | 95.64 | 0.9940 | 1733 |
| DFCNN | 94.97 | 0.7542 | 584 |
| AlexNet | 94.78 | 0.9451 | 478 |
| MMFCNN | 99.58 | 0.3295 | 478 |
| Group | Fault Type | Speed (rpm) | Load (kN) |
|---|---|---|---|
| 1 | Normal | 2900–3000 | 15.5–16.7 |
| 2 | Burned | 2900–3000 | 15.5–16.7 |
| 3 | 2 mm scratched | 2900–3000 | 15.5–16.7 |
| 4 | 3 mm scratched | 2900–3000 | 15.5–16.7 |
| 5 | Normal | 2900–3000 | 1–2.6 |
| 6 | 2 mm scratched | 1400–1500 | 15.5–16.7 |
| 7 | 2 mm scratched | 2900–3000 | 1–2.6 |
| 8 | 3 mm scratched | 1400–1500 | 15.5–16.7 |
| 9 | 3 mm scratched | 2900–3000 | 1–2.6 |
| Test Model | Average Accuracy (%) | Standard Deviation | Average Computation Time |
|---|---|---|---|
| CNN1D | 56.44 | 0.4769 | 316 |
| ResNet | 72.65 | 0.9333 | 1042 |
| DFCNN | 88.08 | 0.8122 | 512 |
| MMFCNN | 93.51 | 0.4249 | 435 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, M.; Jiang, Z.; Tan, Z.; Xiao, W.; Du, G. Tilting Pad Thrust Bearing Fault Diagnosis Based on Acoustic Emission Signal and Modified Multi-Feature Fusion Convolutional Neural Network. Sensors 2025, 25, 904. https://doi.org/10.3390/s25030904
Mao M, Jiang Z, Tan Z, Xiao W, Du G. Tilting Pad Thrust Bearing Fault Diagnosis Based on Acoustic Emission Signal and Modified Multi-Feature Fusion Convolutional Neural Network. Sensors. 2025; 25(3):904. https://doi.org/10.3390/s25030904
Chicago/Turabian StyleMao, Meijiao, Zhiwen Jiang, Zhifei Tan, Wenqiang Xiao, and Guangchao Du. 2025. "Tilting Pad Thrust Bearing Fault Diagnosis Based on Acoustic Emission Signal and Modified Multi-Feature Fusion Convolutional Neural Network" Sensors 25, no. 3: 904. https://doi.org/10.3390/s25030904
APA StyleMao, M., Jiang, Z., Tan, Z., Xiao, W., & Du, G. (2025). Tilting Pad Thrust Bearing Fault Diagnosis Based on Acoustic Emission Signal and Modified Multi-Feature Fusion Convolutional Neural Network. Sensors, 25(3), 904. https://doi.org/10.3390/s25030904