
Machine Learning-Based Measurement and Prediction of Ground Settlement Induced by Shield Tunneling Undercrossing Existing Tunnels in Composite Strata


Abstract
:1. Introduction
2. Monitoring and Analysis
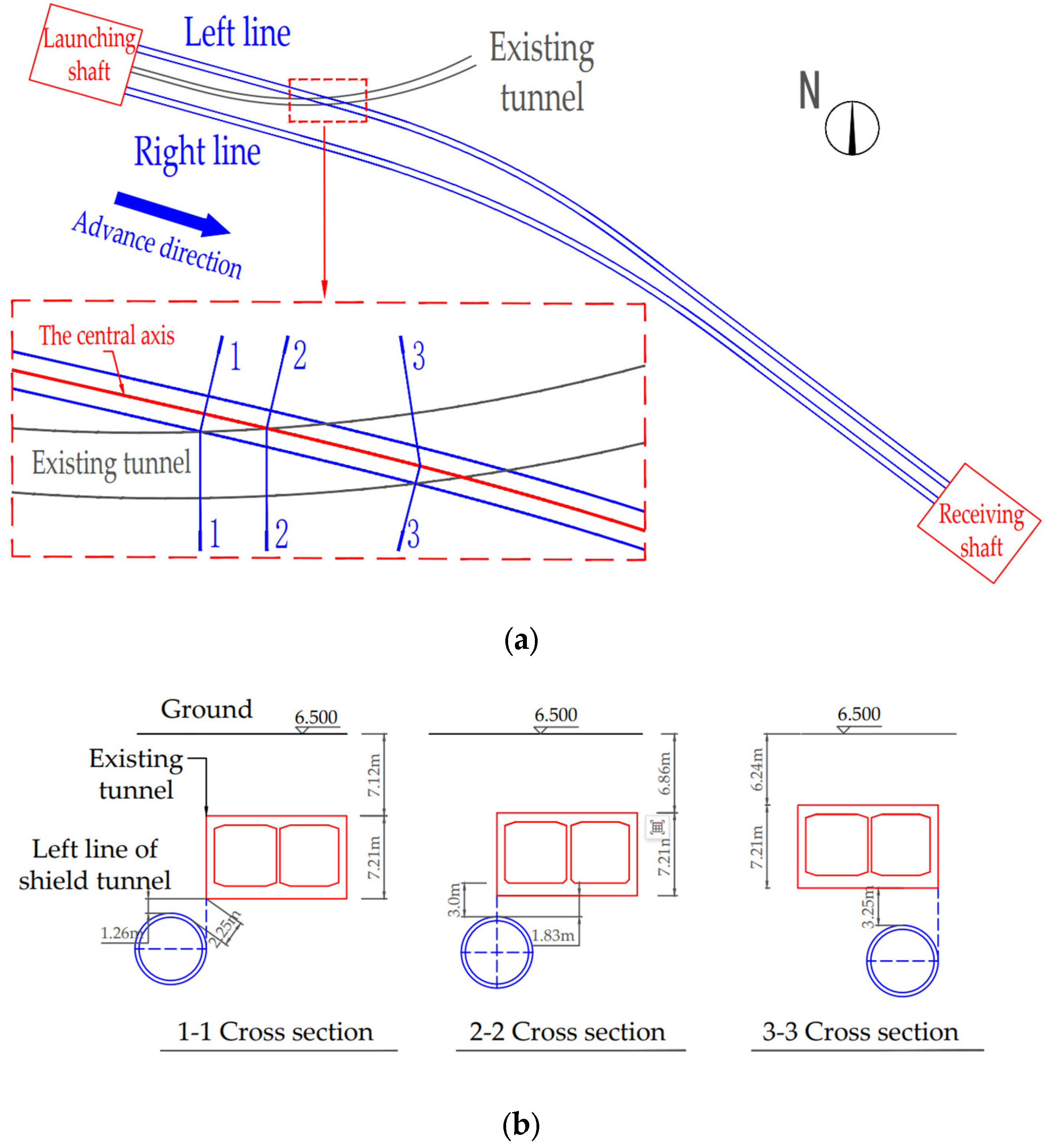
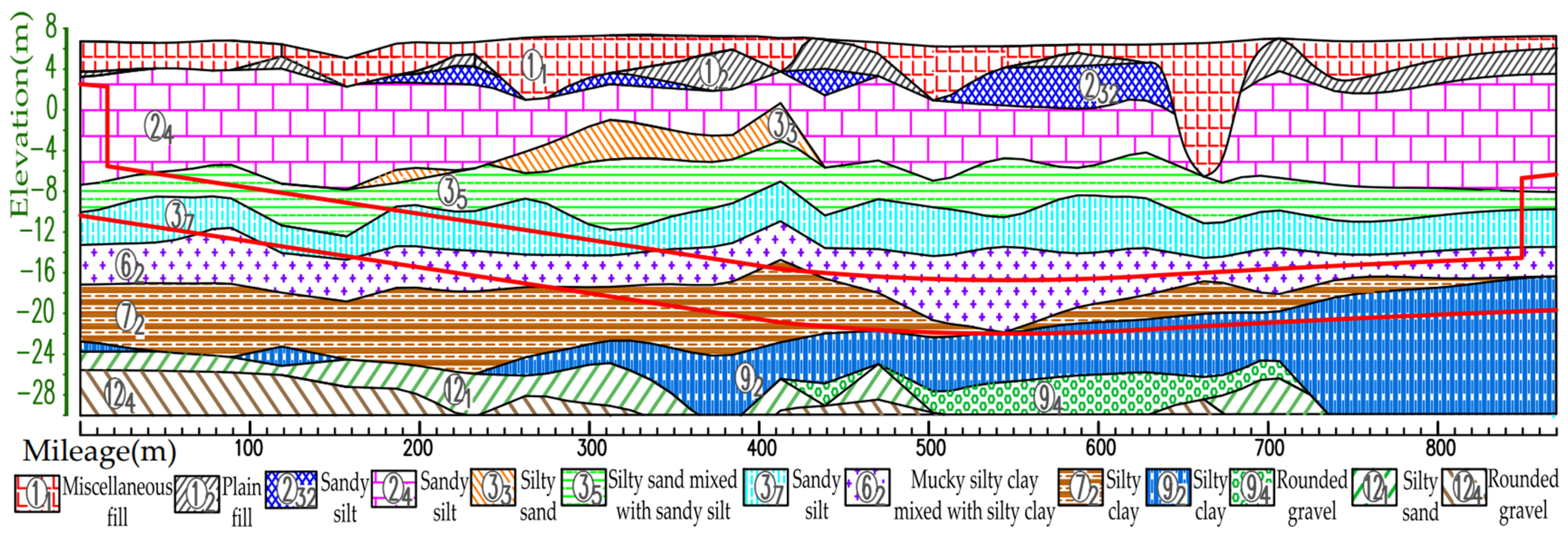
2.1. Project Overview
2.2. Monitoring Scheme
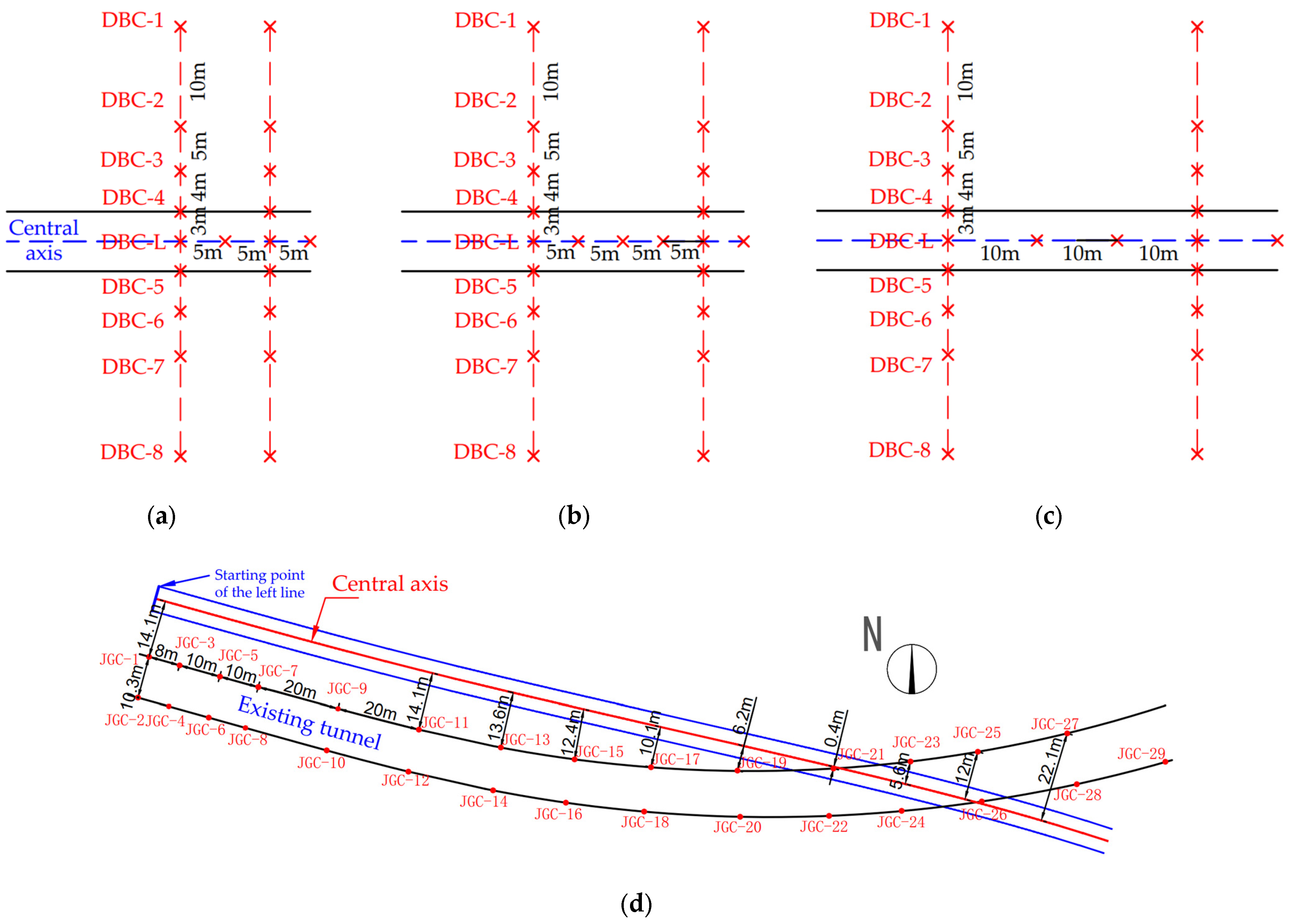
2.2.1. Layout of Monitoring Point
2.2.2. Method of Ground Settlement Monitoring
2.2.3. Sources and Range of Errors
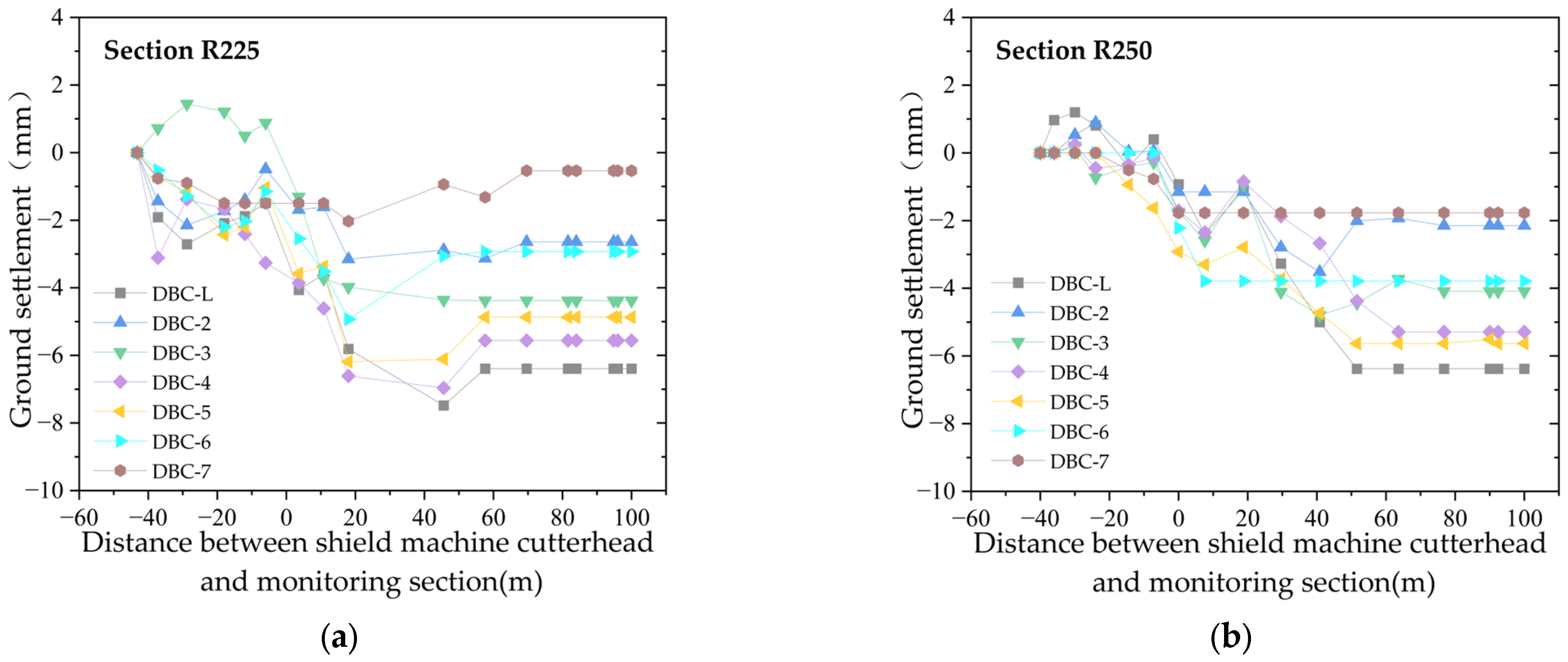
2.3. Longitudinal Ground Settlement
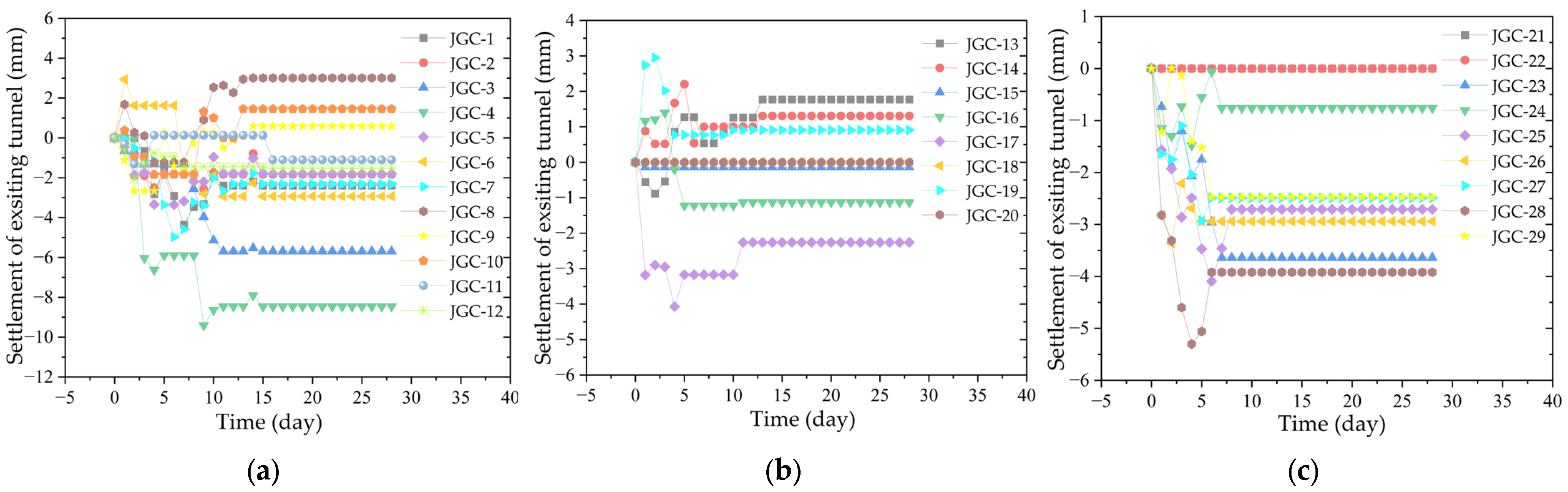
2.4. Settlement of Existing Tunnel
3. Methodology
3.1. Machine Learning Networks
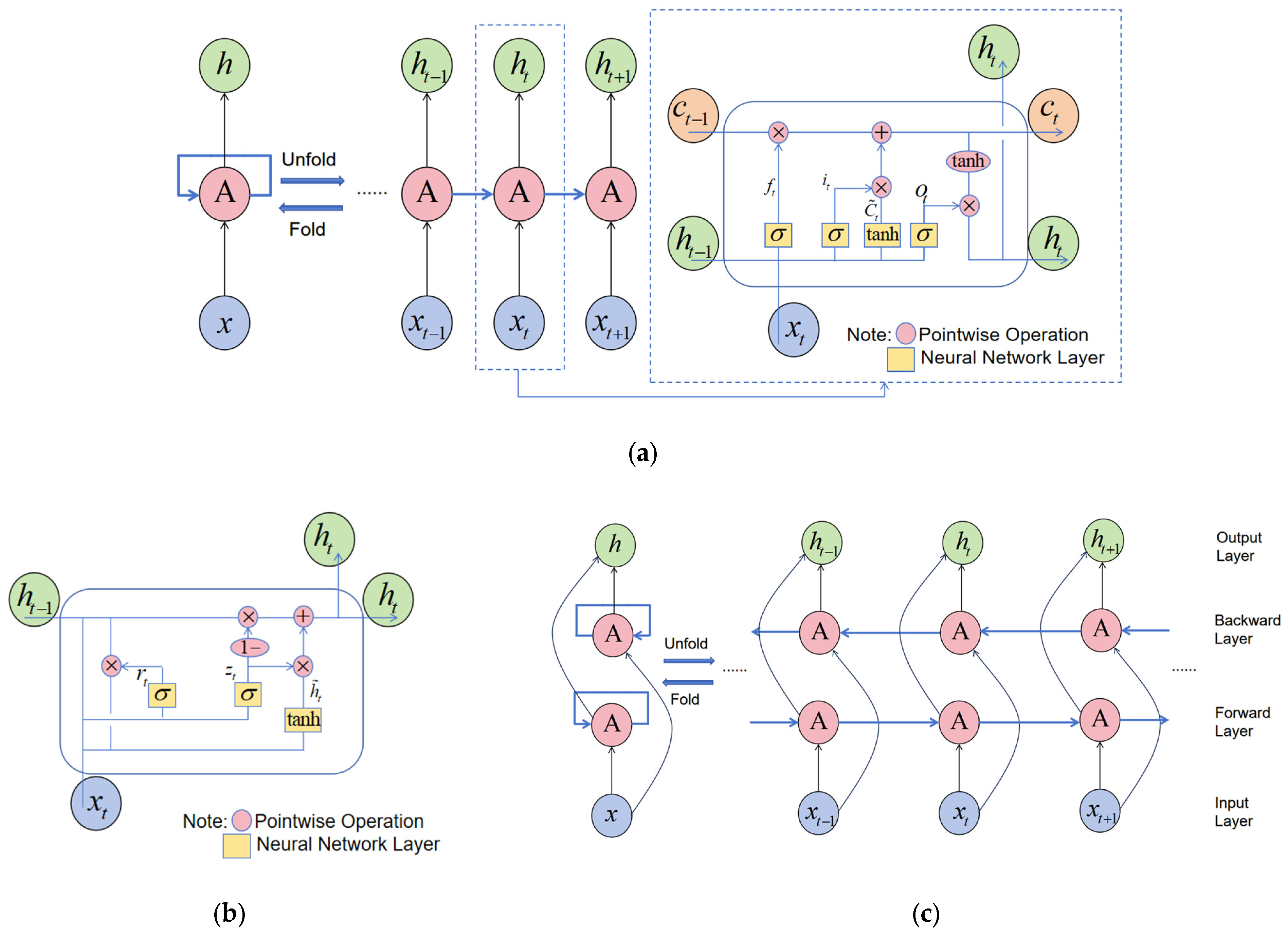
3.1.1. Long Short-Term Memory Neural Networks (LSTM)
3.1.2. Gated Recurrent Unit Neural Network (GRU)
3.1.3. Bidirectional Long Short-Term Memory Neural Network (Bi-LSTM)
3.2. Particle Swarm Optimization (PSO)
4. Prediction Model Parameter Selection
4.1. Geological Parameter
4.2. Geometric Parameter
4.3. Operational Parameter
4.4. Output Parameter
5. Establishment and Prediction of Maximum Ground Settlement Model
5.1. Pre-Processing of Dataset
5.2. Evaluation Indexes of Model
5.3. Selection and Optimization of Model Hyperparameter
5.4. Model Training and Evaluation Results
6. Correlation Analysis and Model Optimization
6.1. Correlation Analysis
6.2. Model Optimization
6.3. Comparison and Analysis
6.4. Discussion
6.4.1. Limitation
6.4.2. Future Perspectives
7. Conclusions
- (1)
- Comprehensive Ground Settlement Monitoring Layout: The left line of the newly constructed shield tunnel adopts three different ground settlement monitoring layout methods, which allow for more comprehensive monitoring of ground settlement. The obtained data effectively analyze the longitudinal ground settlement curve, and machine learning methods can predict the maximum ground settlement at the monitoring points. This monitoring layout is both scientifically sound and cost-effective.
- (2)
- Observed Ground Settlement Characteristics: According to the measured data of cross-sectional ground settlement, before the excavation surface reaches the monitoring section, the ground experiences slight settlement or uplift, with a settlement range of about ±2 mm. After the excavation surface reaches the monitoring section, ground settlement increases. The settlement tends to stabilize when the excavation surface is 40–60 m away from the monitoring section, and the normalized average final ground settlement value of the cross-section aligns well with the curve derived from the Peck empirical formula (with i = 6.5).
- (3)
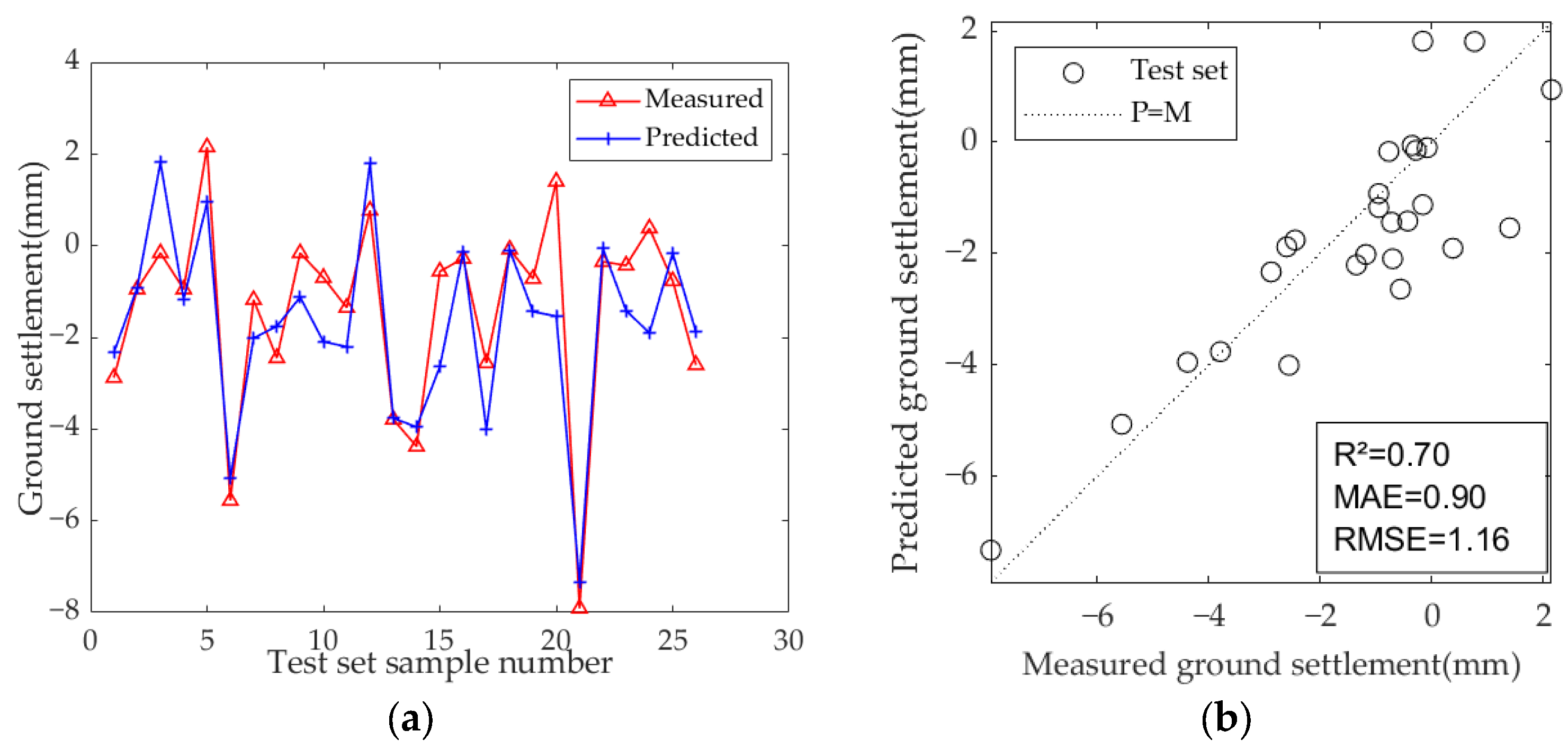
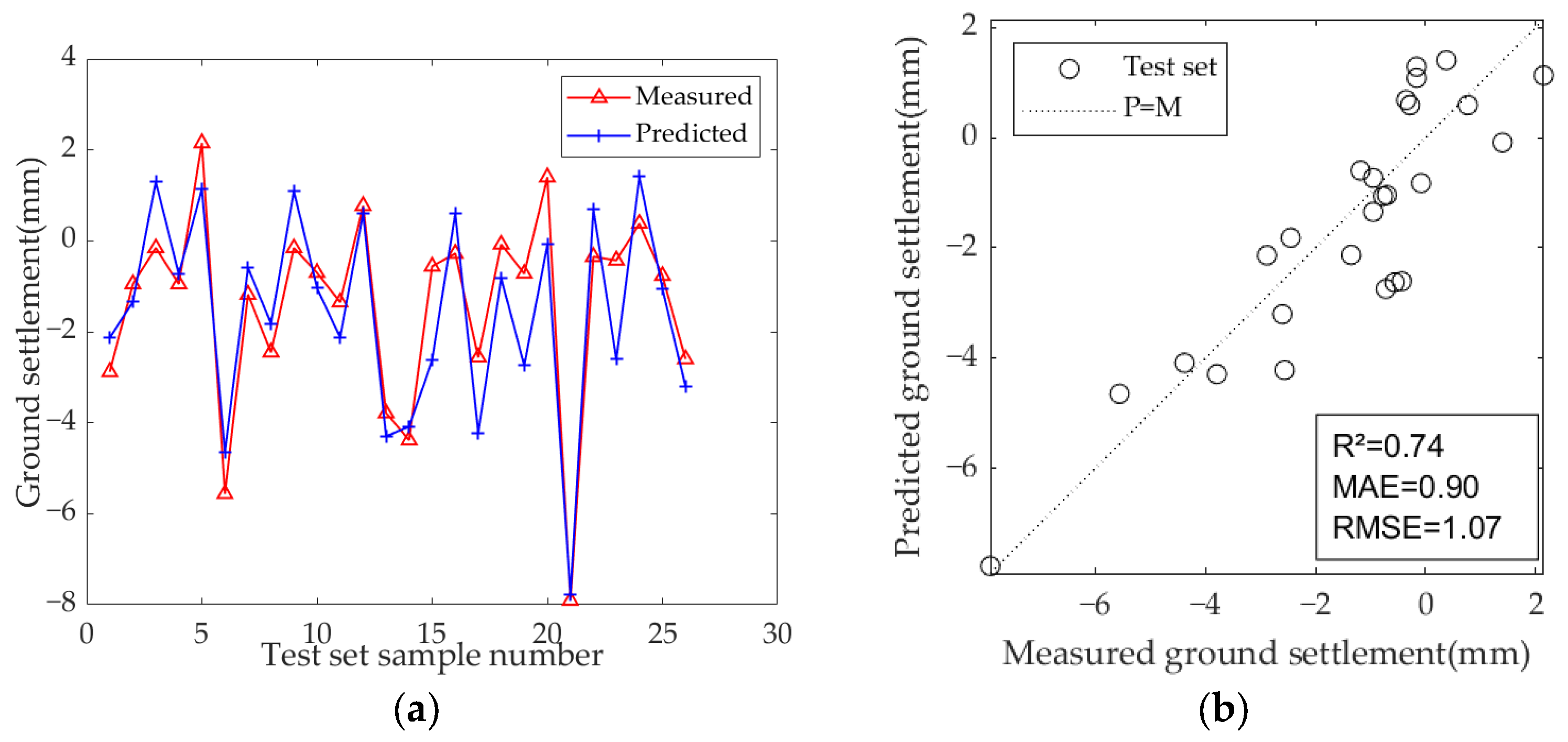
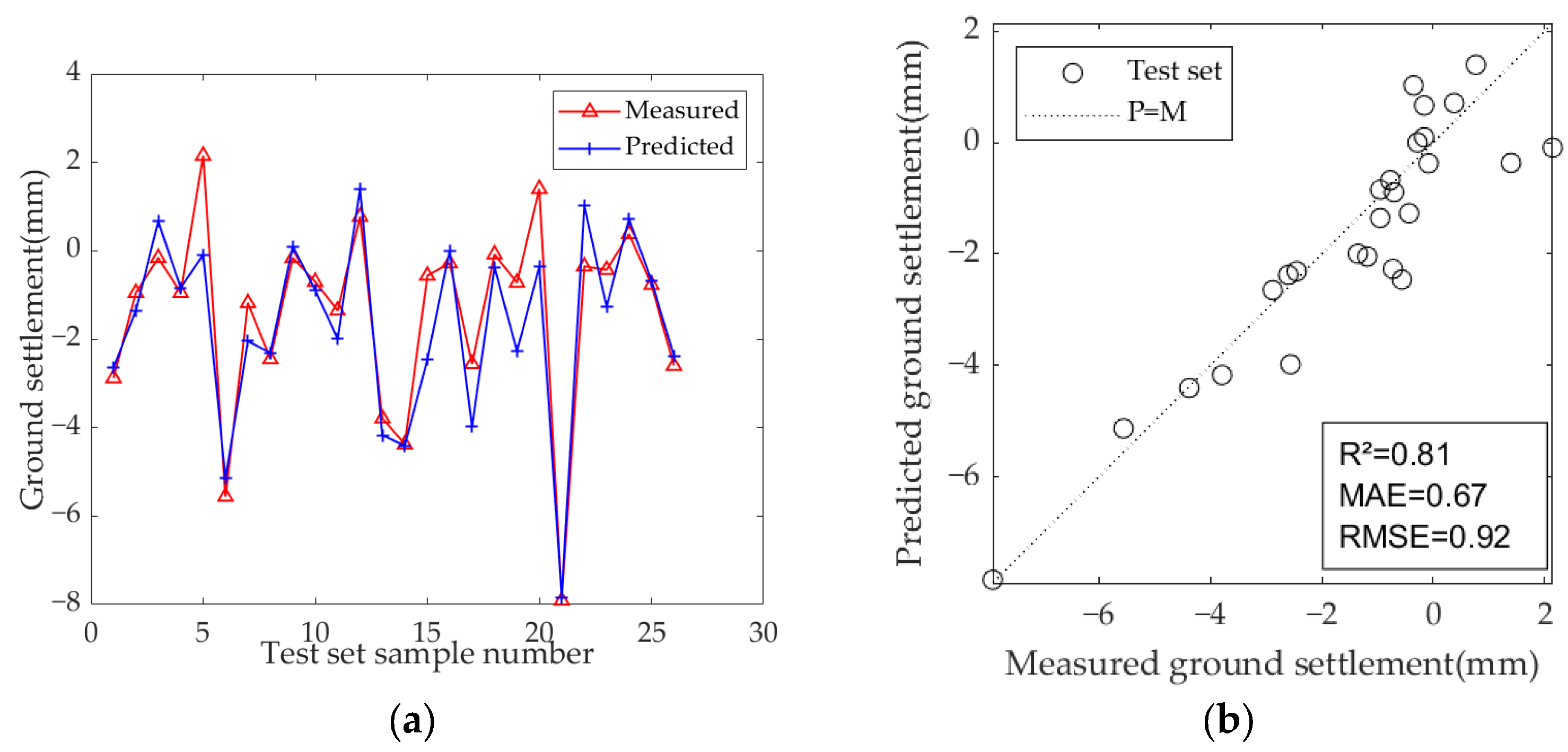
- Machine Learning Model Performance: Using machine learning methods, it was verified that the LSTM, GRU, and Bi-LSTM models, after hyperparameter optimization through particle swarm optimization (PSO), could effectively predict ground settlement using small sample data under the complex working conditions of crossing composite strata and undercrossing an existing tunnel. The model prediction abilities were ranked as follows: Bi-LSTM > GRU > LSTM.
- (4)
- Correlation Analysis of Model Parameters and model optimization: A Pearson correlation coefficient analysis was performed on the model parameters, revealing that none of the input parameters had a strong linear relationship with the output parameter, ground settlement. Only thrust and grouting pressure showed a relatively high linear correlation with ground settlement. Additionally, there were extremely strong linear relationships between some input parameters. Parameters with excessively high linear correlations were removed, and those with low linear correlation were retained. The ground settlement was then predicted again using machine learning methods. The results showed that after optimizing the number of input parameters through Pearson correlation coefficient analysis, the prediction capabilities of all three models improved. Among them, LSTM and GRU showed significant improvement, while Bi-LSTM showed a slight improvement. This indicates that LSTM and GRU models are more dependent on the selection of input parameters, while the Bi-LSTM model is less sensitive to input parameter selection, can handle highly correlated inputs, and is more stable.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, P.; Wu, H.-N.; Chen, R.-P.; Dai, T.; Meng, F.-Y.; Wang, H.-B. A critical evaluation of machine learning and deep learning in shield-ground interaction prediction. Tunn. Undergr. Space Technol. 2020, 106, 103593. [Google Scholar] [CrossRef]
- Liu, C.; Liu, Y.; Chen, Y.; Zhao, C.; Qiu, J.; Wu, D.; Liu, T.; Fan, H.; Qin, Y.; Tang, K. A State-of-the-Practice Review of Three-Dimensional Laser Scanning Technology for Tunnel Distress Monitoring. J. Perform. Constr. Facil. 2023, 37, 03123001. [Google Scholar] [CrossRef]
- Sun, G.-K.; Zhang, C.-L. The application of the Gray-Markov theory in tunnel surrounding rock deformation prediction. Highway 2015, 60, 281–285. [Google Scholar]
- Zhao, T. Research on Invert Heave Mechanism and Control Technique of High-speed Railway Tunnel in Mudstone. Ph.D. Thesis, Lanzhou Jiaotong University, Lanzhou, China, 2022. [Google Scholar]
- Qian, W.; Qi, T.; Zhao, Y.; Le, Y.; Yi, H. Deformation characteristics and safety assessment of a high-speed railway induced by undercutting metro tunnel excavation. J. Rock Mech. Geotech. Eng. 2019, 11, 88–98. [Google Scholar] [CrossRef]
- Zhou, X.; Zhao, C.; Bian, X. Prediction of maximum ground surface settlement induced by shield tunneling using XGBoost algorithm with golden-sine seagull optimization. Comput. Geotech. 2023, 154, 105156. [Google Scholar] [CrossRef]
- Liu, X.; Fang, Q.; Jiang, A.; Zhang, D.; Li, J. Discontinuous mechanical behaviors of existing shield tunnel with stiffness reduction at longitudinal joints. Front. Struct. Civ. Eng. 2023, 17, 37–52. [Google Scholar] [CrossRef]
- Zhou, Z.; Zheng, Y.-D.; Hu, J.-F.; Yang, H.; Gong, C.-J. Deformation analysis of shield undercrossing and vertical paralleling excavation with existing tunnel in composite stratum. J. Cent. South Univ. 2023, 30, 3127–3144. [Google Scholar] [CrossRef]
- Liu, X.; Jiang, A.; Hai, L.; Wan, Y.; Li, J. Study on soil gap formation beneath existing underground structures due to new excavation below. Comput. Geotech. 2021, 139, 104379. [Google Scholar] [CrossRef]
- Jiao, N.; Sun, S.; Liu, J.; Guo, Q.; Ding, J.; Wan, X. Analysis of existing railway deformation caused by double shield tunnel construction in soil-rock composite stratum. Energy Rep. 2023, 9, 159–165. [Google Scholar] [CrossRef]
- Zhang, N.; Zhou, A.; Pan, Y.; Shen, S.-L. Measurement and prediction of tunnelling-induced ground settlement in karst region by using expanding deep learning method. Measurement 2021, 183, 109700. [Google Scholar] [CrossRef]
- Chen, R.-P.; Zou, N.; Wu, H.-N.; Cheng, H.-Z. Review of prediction and control for ground settlement caused by shield tunneling based on machine learning. J. Huazhong Univ. Sci. Technol. 2022, 50, 56–65. [Google Scholar] [CrossRef]
- Peck, R.B. Deep excavations and tunneling in soft ground. In Proceedings of the 7th International Conference on Soil Mechanics and Foundation Engineering, Mexico City, Mexico, 25–29 August 1969; pp. 225–290. [Google Scholar]
- Palmer, J.H.L.; Belshaw, D.J. Deformations and Pore Pressures in the Vicinity of a Precast, Segmented, Concrete-Lined Tunnel in Clay. Can. Geotech. J. 1980, 17, 174–184. [Google Scholar] [CrossRef]
- Shen, S.-L.; Cui, Q.-L.; Ho, C.-E.; Xu, Y.-S. Ground Response to Multiple Parallel Microtunneling Operations in Cemented Silty Clay and Sand. J. Geotech. Geoenviron. Eng. 2016, 142, 04016001. [Google Scholar] [CrossRef]
- Ozdemit, L. Development of Theoretical Equations for Predicting Tunnel Boring Ability. Ph.D. Thesis, Colorado School of Mines, Colorado, America, 1977. [Google Scholar]
- Loganathan, N.; Poulos, H.G. Analytical prediction for tunneling-induced ground movements in clays. J. Geotech. Geoenviron. Eng. 1998, 124, 846–856. [Google Scholar] [CrossRef]
- Wei, G.; Xu, R.-Q. Prediction of longitudinal ground deformation due to tunnel construction with shield in soft soil. Chin. J. Geotech. Eng. 2005, 9, 1077–1081. [Google Scholar]
- Chen, R.-P.; Li, J.; Kong, L.-G.; Tang, L.-J. Experimental study on face instability of shield tunnel in sand. Tunn. Undergr. Space Technol. 2013, 33, 12–21. [Google Scholar] [CrossRef]
- Do, N.-A.; Dias, D.; Oreste, P.; Djeran-Maigre, I. Three-dimensional numerical simulation of a mechanized twin tunnels in soft ground. Tunn. Undergr. Space Technol. 2014, 42, 40–51. [Google Scholar] [CrossRef]
- Meng, F.-Y.; Chen, R.-P.; Kang, X. Effects of tunneling-induced soil disturbance on the post-construction settlement in structured soft soils. Tunn. Undergr. Space Technol. 2018, 80, 53–63. [Google Scholar] [CrossRef]
- Freitag, S.; Cao, B.T.; Ninic, J.; Meschke, G. Recurrent neural networks and proper orthogonal decomposition with interval data for real-time predictions of mechanised tunnelling processes. Comput. Struct. 2018, 207, 258–273. [Google Scholar] [CrossRef]
- Vaghefi, M.; Mobaraki, B. Evaluation of the effect of explosion on the concrete bridge deck using LS-DYNA. Int. Rev. Civ. Eng. 2021, 12, 135–142. [Google Scholar] [CrossRef]
- Chen, R.-P.; Dai, T.; Zhang, P.; Wu, H.-N. Prediction method of tunneling-induced ground settlement using machine learning algorithms. J. Hunan Univ. 2021, 48, 111–118. [Google Scholar] [CrossRef]
- Li, L.-B.; Gong, X.-N.; Gan, X.-L.; Cheng, K.; Hou, Y.-M. Prediction of maximum ground surface settlement induced by shield tunneling based on recurrent neural network. China Civ. Eng. J. 2020, 53, 13–19. [Google Scholar] [CrossRef]
- Suwansawat, S.; Einstein, H.H. Artificial neural networks for predicting the maximum surface settlement caused by EPB shield tunneling. Tunn. Undergr. Space Technol. 2006, 21, 133–150. [Google Scholar] [CrossRef]
- Hasanipanah, M.; Noorian-Bidgoli, M.; Armaghani, D.J.; Khamesi, H. Feasibility of PSO-ANN model for predicting surface settlement caused by tunneling. Eng. Comput. 2016, 32, 705–715. [Google Scholar] [CrossRef]
- Boubou, R.; Emeriault, F.; Kastner, R. Artificial neural network application for the prediction of ground surface movements induced by shield tunnelling. Can. Geotech. J. 2010, 47, 1214–1233. [Google Scholar] [CrossRef]
- Pourtaghi, A.; Lotfollahi-Yaghin, M.A. Wavenet ability assessment in comparison to ANN for predicting the maximum surface settlement caused by tunneling. Tunn. Undergr. Space Technol. 2012, 28, 257–271. [Google Scholar] [CrossRef]
- Kohestani, V.R.; Bazarganlari, M.R.; Marnani, J.A. Prediction of maximum surface settlement caused by earth pressure balance shield tunneling using random forest. J. Artif. Intell. Data Min. 2017, 5, 127–135. [Google Scholar]
- Darabi, A.; Ahangari, K.; Noorzad, A.; Arab, A. Subsidence estimation utilizing various approaches—A case study: Tehran No. 3 subway line. Tunn. Undergr. Space Technol. 2012, 31, 117–127. [Google Scholar] [CrossRef]
- Ocak, I.; Seker, S.E. Calculation of surface settlements caused by EPBM tunneling using artificial neural network, SVM, and Gaussian processes. Environ. Earth Sci. 2013, 70, 1263–1276. [Google Scholar] [CrossRef]
- Zhou, J.; Shi, X.; Du, K.; Qiu, X.; Li, X.; Mitri, H.S. Feasibility of Random-Forest Approach for Prediction of Ground Settlements Induced by the Construction of a Shield-Driven Tunnel. Int. J. Geomech. 2017, 17, 6. [Google Scholar] [CrossRef]
- Chen, R.-P.; Zhang, P.; Kang, X.; Zhong, Z.-Q.; Liu, Y.; Wu, H.-N. Prediction of maximum surface settlement caused by earth pressure balance (EPB) shield tunneling with ANN methods. Soils Found. 2019, 59, 284–295. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, R.-P.; Wu, H.-N. Real-time analysis and regulation of EPB shield steering using Random Forest. Autom. Constr. 2019, 106, 102860. [Google Scholar] [CrossRef]
- Zhang, P.; Wu, H.N.; Chen, R.P.; Chan, T.H.T. Hybrid meta-heuristic and machine learning algorithms for tunneling-induced settlement prediction: A comparative study. Tunn. Undergr. Space Technol. 2020, 99, 103383. [Google Scholar] [CrossRef]
- Chen, R.; Zhang, P.; Wu, H.; Wang, Z.; Zhong, Z. Prediction of shield tunneling-induced ground settlement using machine learning techniques. Front. Struct. Civ. Eng. 2019, 13, 1363–1378. [Google Scholar] [CrossRef]
- Hu, C.-M.; Feng, L.-L.; Li, L.; Yu, X.-T.; Li, Z.-L. Ground settlement control and parameter optimization of shield tunneling based on machine learning. Tunn. Constr. 2023, 43, 1985–1995. [Google Scholar]
- Zhou, Z.; Zhang, J.-J.; Din, H.-H.; Li, F. Settlement prediction model of shield tunnel under-crossing existing tunnel based on GA-Bi-LSTM. Chin. J. Rock Mech. Eng. 2023, 42, 224–234. [Google Scholar] [CrossRef]
- Yang, C.; Huang, R.; Liu, D.; Qiu, W.; Zhang, R.; Tang, Y. Analysis and Warning Prediction of Tunnel Deformation Based on Multifractal Theory. Fractal Fract. 2024, 8, 108. [Google Scholar] [CrossRef]
- Gao, M.-Y.; Zhang, N.; Shen, S.-L.; Zhou, A. Real-Time Dynamic Earth-Pressure Regulation Model for Shield Tunneling by Integrating GRU Deep Learning Method with GA Optimization. IEEE Access 2020, 8, 64310–64323. [Google Scholar] [CrossRef]
- Mahmoodzadeh, A.; Mohammadi, M.; Daraei, A.; Ali, H.F.H.; Al-Salihi, N.K.; Omer, R.M.D. Forecasting maximum surface settlement caused by urban tunneling. Autom. Constr. 2020, 120, 103375. [Google Scholar] [CrossRef]
- Kun, Z.; Hai-Min, L.; Shui-Long, S.; Annan, Z.; Zhen-Yu, Y. Data on evolutionary hybrid neural network approach to predict shield tunneling-induced ground settlements. Data Brief 2020, 33, 106432. [Google Scholar]
- Yang, X.-Y.; Gong, X.-N.; Zhang, X.-C.; Jin, J.-M.; Zhang, Z.-Q.; Xu, Y.-Q. Behaviors of alluvial silt foundation pits along Qiantang Rive. Chin. J. Geotech. Eng. 2012, 34, 750–755. [Google Scholar]
- Guan, M.-Z.; Wu, Y.-Y.; Dong, M.; Huang, S. Research on the development risk of silty sand shield tunnel based on monitoring data. J. Ground Improv. 2023, 5, 398–407. [Google Scholar]
- Jin, W.-T. Application of DNA03 digital levelling instrument in Yellow-River-Crossing works on mid route of South-to-North water transfer project. Northwest Hydropower 2009, 2, 15–17. [Google Scholar]
- Shao, G.-Z. Study on the Deformation Law and System of Monitoring of Soil and Rock Foundation Pit in Qingdao. Master’s Thesis, Qingdao Technological University, Qingdao, China, 2012. [Google Scholar]
- O’Reilly, M.; New, B. Settlements above tunnels in the United Kingdom—Their magnitude and prediction. Tunn. Tunn. Int. 2015, 56–66, 55. [Google Scholar] [CrossRef]
- Wei, G. Selection and distribution of ground loss ratio induced by shield tunnel construction. Chin. J. Geotech. Eng. 2010, 32, 1354–1361. [Google Scholar]
- Li, S.G. Analysis and Numerical Simulation of Ground Settlement Caused by EPB Shield Tunnel Construction. Master’s Thesis, Central South University, Changsha, China, 2006. [Google Scholar]
- Bengio, Y.; Simard, P.; Frasconi, P. Learning Long-Term Dependencies with Gradient Descent is Difficult. IEEE Trans. Neural Netw. 1994, 5, 157–166. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Vincent, P.; Larochelle, H.; Lajoie, I.; Bengio, Y.; Manzagol, P.-A. Stacked Denoising Autoencoders: Learning Useful Representations in a Deep Network with a Local Denoising Criterion. J. Mach. Learn. Res. 2010, 11, 3371–3408. [Google Scholar]
- Cho, K.; van Merrienboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning Phrase Representations Using RNN Encoder-Decoder for Statistical Machine Translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- Wen, H.-Y.; Zhang, D.-R. Highway Traffic Volume Prediction Based on Bi-LSTM Model. Highw. Eng. 2019, 44, 51–56. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 1944, pp. 1942–1948. [Google Scholar]
- Yang, W.-J.; Wang, T.-T.; Lai, H.-P.; Zhang, L.-J.; Yuan, Y.; Luo, W. Research on the ground displacement law of double-track shield tunneling under-crossing existing metro. J. Railw. Eng. Soc. 2021, 38, 66–73. [Google Scholar]
- Zhou, Z.; Chen, Y.; Liu, Z.; Miao, L. Theoretical prediction model for deformations caused by construction of new tunnels undercrossing existing tunnels based on the equivalent layered method. Comput. Geotech. 2020, 123, 103565. [Google Scholar] [CrossRef]
- Wang, J.; Liu, Y.; Zhang, D.; Bai, H.; Du, N.; Meng, F. The Displacement Solution of Existing Tunnel and Ground by Traversing Construction by Stochastic Medium Theory. In Proceedings of the DEStech Transactions on Materials Science and Engineering, Nanjing, China, 21–23 April 2017. [Google Scholar]
- Li, Z.-C.; Chen, R.-P.; Meng, F.-Y.; Ye, J.-N. Tunnel boring machine tunneling-induced ground settlements in soft clay and influence of excavation parameters. J. Zhejiang Univ. 2015, 49, 1268–1275. [Google Scholar]
- Chen, R.; Zou, N.; Cheng, H.; Wu, H. Prediction of tunneling-induced surface settlement using a Bi-LSTM model with high generalization performance. In Smart Geotechnics for Smart Societies; CRC Press: Boca Raton, FL, USA, 2023; pp. 907–915. [Google Scholar]
- Liu, X.; Li, K.; Jiang, A.; Fang, Q.; Zhang, R. Prediction interaction responses between railway subgrade and shield tunnelling using machine learning with sparrow search algorithm. Transp. Geotech. 2024, 44, 101169. [Google Scholar] [CrossRef]
- Li, C.; Li, J.; Shi, Z.; Li, L.; Li, M.; Jin, D.; Dong, G. Prediction of Surface Settlement Induced by Large-Diameter Shield Tunneling Based on Machine-Learning Algorithms. Geofluids 2022, 2022, 1–13. [Google Scholar] [CrossRef]
- Lee, J.H.; Akutagawa, S. Quick prediction of tunnel displacements using Artificial Neural Network and field measurement results. Int. J. JCRM 2009, 5, 53–62. [Google Scholar]
- Kingma, D.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Wu, J.; El Naggar, M.H.; Wang, K. Pile Damage Detection Using Machine Learning with the Multipoint Traveling Wave Decomposition Method. Sensors 2023, 23, 8308. [Google Scholar] [CrossRef]
- GB 50911-2013; Technical Specification for Monitoring of Urban Rail Transit Projects. Ministry of Housing and Urban-Rural Development of the People’s Republic of China, General Administration of Quality Supervision. Inspection and Quarantine of the People’s Republic of China: Beijing, China; Construction Industry Press: Beijing, China, 2013.
- Wu, J.; El Naggar, M.H.; Wang, K. A Hybrid Convolutional and Recurrent Neural Network for Multi-Sensor Pile Damage Detection with Time Series. Sensors 2024, 24, 1190. [Google Scholar] [CrossRef]
- Dong, L.-P.; Nie, Q.-H.; Sun, X.-K.; Cao, W.-F.; Kou, D.-T.; Bai, Z.-Q.; Yang, S.-N. Analysis of Impact of Shield Tunneling Parameters on Ground Settlement Based on Pearson Correlation Coefficient Method. Constr. Technol. 2024, 53, 116–123. [Google Scholar]
- Dui, H.; Dong, X.; Tao, J. Reliability Evaluation and Prediction Method with Small Samples. Int. J. Math. Eng. Manag. Sci. 2023, 8, 560–580. [Google Scholar] [CrossRef]
- Ladino-Moreno, E.O.; García-Ubaque, C.A. Leak Detection in Urban Hydraulic Systems Using the K-BiLSTM-Monte Carlo Dropout Model. Civ. Eng. J. 2024, 10, 2066–2087. [Google Scholar] [CrossRef]
- Chen, W.; Chen, W.; Liu, H.; Wang, Y.; Bi, C.; Gu, Y. A RUL Prediction Method of Small Sample Equipment Based on DCNN-BiLSTM and Domain Adaptation. Mathematics 2022, 10, 1022. [Google Scholar] [CrossRef]
- Chen, J.; Pi, D.; Wu, Z.; Zhao, X.; Pan, Y.; Zhang, Q. Imbalanced satellite telemetry data anomaly detection model based on Bayesian LSTM. Acta Astronaut. 2021, 180, 232–242. [Google Scholar] [CrossRef]
- Casagli, N.; Frodella, W.; Morelli, S.; Tofani, V.; Ciampalini, A.; Intrieri, E.; Raspini, F.; Rossi, G.; Tanteri, L.; Lu, P. Spaceborne, UAV and ground-based remote sensing techniques for landslide mapping, monitoring and early warning. Geoenviron. Disasters 2017, 4, 9. [Google Scholar] [CrossRef]
- GB/T 50308-2017; Code for Urban Rail Transit Engineering Survey. Construction Industry Press: Beijing, China, 2017.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Layer Number | Name of Soil Layer | Unit Weights (kN·m−3) | Void Ratio | Elastic Modulus (Mpa) | Standard Penetration Test Blow Count | Cohesion (kPa) | Internal Friction Angle (°) | Static Lateral Pressure Coefficient (m·s−1) |
|---|---|---|---|---|---|---|---|---|
| ②4 | sandy silt | 19.10 | 0.80 | 6.24 | 12.00 | 5.00 | 26.00 | 0.52 |
| ③5 | silty sand mixed with sandy silt | 19.30 | 0.73 | 20.7 | 16.10 | 5.00 | 32.00 | 0.37 |
| ③7 | sandy silt | 19.20 | 0.82 | 6.72 | 9.70 | 7.00 | 24.00 | 0.52 |
| ⑥2 | mucky silty clay mixed with silty clay | 18.20 | 1.03 | 3.12 | (3.60) | 12.00 | 16.00 | 0.58 |
| ⑦2 | silty clay | 19.70 | 0.74 | 12.96 | 17.50 | 28 | 18.00 | 0.47 |
| Category | Parameter | Abbreviation | Unit | Input/Output |
| Geological parameters | Modified standard penetration test blow count | MSPT | Input | |
| Elastic modulus of top soil layer | Et | MPa | Input | |
| Elastic modulus of bottom soil layer | Eb | MPa | Input | |
| Static lateral pressure coefficient of the top soil layer | Kt | m·s−1 | Input | |
| Static lateral pressure coefficient of the bottom soil layer | Kb | m·s−1 | Input |
| Category | Parameter | Abbreviation | Unit | Input/Output |
|---|---|---|---|---|
| Geometric parameters | Cover depth | C | m | Input |
| Distance between monitoring point and central axis | MTC | m | Input | |
| Horizontal distance | HD | m | Input | |
| Vertical dimension | VD | m | Input |
| Category | Parameter | Abbreviation | Unit | Input/Output |
|---|---|---|---|---|
| Operational parameters | Thrust | Th | MN | Input |
| Cutterhead rotational torque | Crt | KN × m | Input | |
| Cutterhead rotational speed | Crs | r/min | Input | |
| Excavation rate | Er | mm/min | Input | |
| Penetration rate | Pr | mm/min | Input | |
| Grouting pressure | Gp | bar | Input | |
| Chamber earth pressure | Cp | bar | Input |
| Category | Parameter | Abbreviation | Unit | Input/Output |
|---|---|---|---|---|
| Settlement | Maximum ground settlement of monitoring point | Sp | mm | Output |
| Hyperparameters | Initial Learning Rate | Optimizer | Iterations | Activation Function |
|---|---|---|---|---|
| value | 0.01 | Adam | 2000 | ReLU |
| Model | Optimal Hyperparameters | R2 | MAE | RMSE |
|---|---|---|---|---|
| LSTM | number of hidden layers: 1 number of hidden layer units: 28 | 0.70 | 0.90 | 1.16 |
| GRU | number of hidden layers: 1 number of hidden layer units: 18 | 0.74 | 0.90 | 1.07 |
| Bi-LSTM | number of hidden layers: 2 number of hidden layer units: 24 | 0.81 | 0.67 | 0.92 |
| |R| | Linear Correlation |
|---|---|
| 0 | no linearity |
| (0, 0.2] | very weak correlation |
| (0.2, 0.4] | weak correlation |
| (0.4, 0.6] | moderate correlation |
| (0.6, 0.8] | strong correlation |
| (0.8, 1] | very strong correlation |
| Category | Parameter | Abbreviation | Unit | Input/Output |
|---|---|---|---|---|
| Geological parameters | Modified standard penetration test blow count | MSPT | Input | |
| Elastic modulus of bottom soil layer | Eb | MPa | Input | |
| Geometric parameters | Cover depth | C | m | Input |
| Distance between monitoring point and central axis | MTC | m | Input | |
| Operational parameters | Thrust | Th | MN | Input |
| Cutterhead rotational torque | Crt | KN × m | Input | |
| Cutterhead rotational speed | Crs | r/min | Input | |
| Penetration rate | Pr | mm/min | Input | |
| Grouting pressure | Gp | bar | Input | |
| Chamber earth pressure | Cp | bar | Input | |
| Settlement | Maximum ground settlement of monitoring point | Sp | mm | Output |
| Model | Optimal Hyperparameters | R2 | MAE | RMSE |
|---|---|---|---|---|
| Optimized LSTM | number of hidden layers: 1 number of hidden layer units: 25 | 0.78 | 0.74 | 0.99 |
| Optimized GRU | number of hidden layers: 3 number of hidden layer units: 16 | 0.84 | 0.65 | 0.85 |
| Optimized Bi-LSTM | number of hidden layers: 2 number of hidden layer units: 13 | 0.84 | 0.59 | 0.84 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, M.; Guan, M.; Wang, K.; Wu, Y.; Fu, Y. Machine Learning-Based Measurement and Prediction of Ground Settlement Induced by Shield Tunneling Undercrossing Existing Tunnels in Composite Strata. Sensors 2025, 25, 1600. https://doi.org/10.3390/s25051600
Dong M, Guan M, Wang K, Wu Y, Fu Y. Machine Learning-Based Measurement and Prediction of Ground Settlement Induced by Shield Tunneling Undercrossing Existing Tunnels in Composite Strata. Sensors. 2025; 25(5):1600. https://doi.org/10.3390/s25051600
Chicago/Turabian StyleDong, Mei, Mingzhe Guan, Kuihua Wang, Yeyao Wu, and Yuhan Fu. 2025. "Machine Learning-Based Measurement and Prediction of Ground Settlement Induced by Shield Tunneling Undercrossing Existing Tunnels in Composite Strata" Sensors 25, no. 5: 1600. https://doi.org/10.3390/s25051600
APA StyleDong, M., Guan, M., Wang, K., Wu, Y., & Fu, Y. (2025). Machine Learning-Based Measurement and Prediction of Ground Settlement Induced by Shield Tunneling Undercrossing Existing Tunnels in Composite Strata. Sensors, 25(5), 1600. https://doi.org/10.3390/s25051600