
Study on the Influence of Unbalanced Phase Difference Combinations on Vibration Characteristics of Rotor Systems


Abstract
1. Introduction
2. Rotor Dynamics Modeling Method
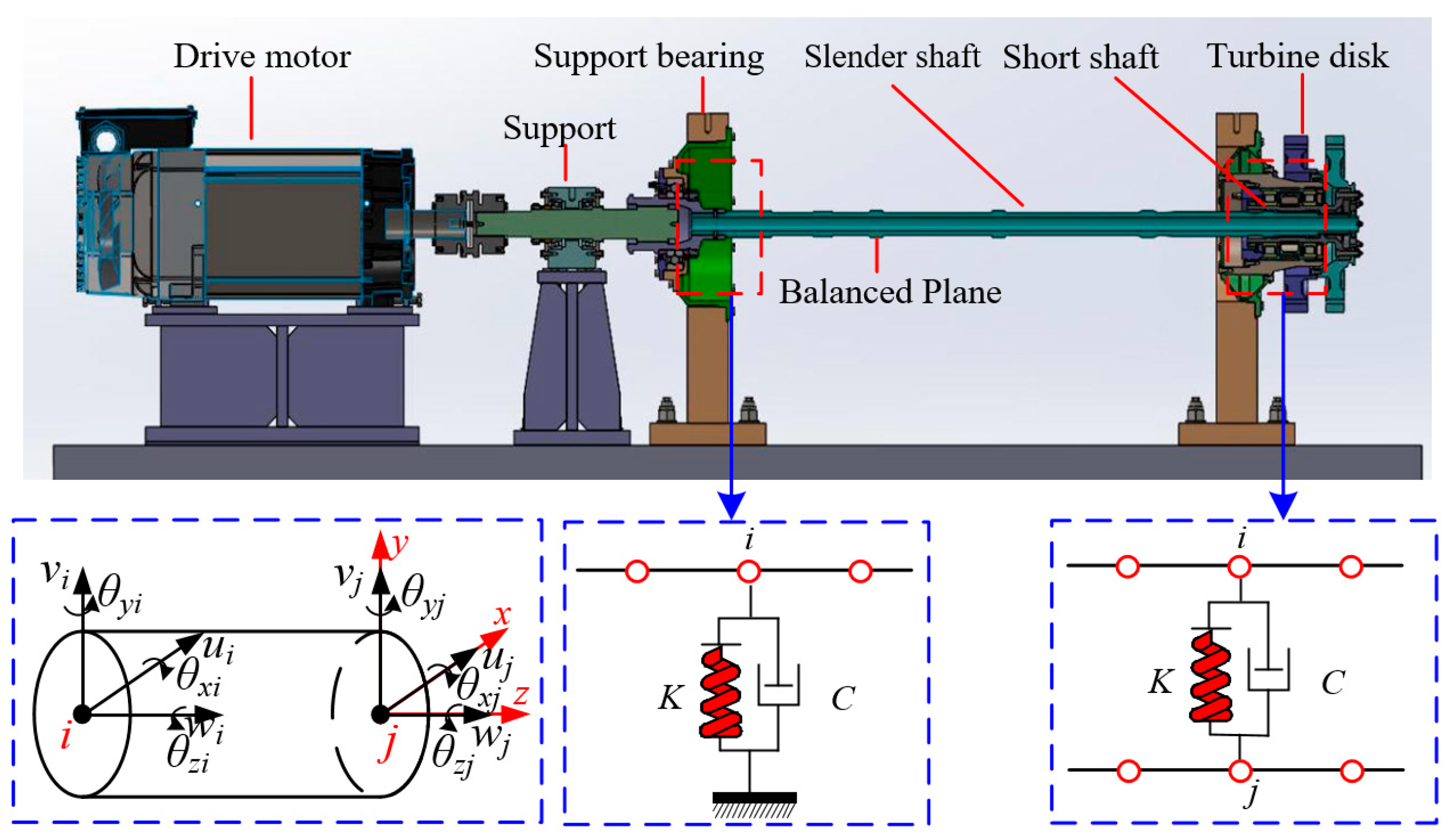
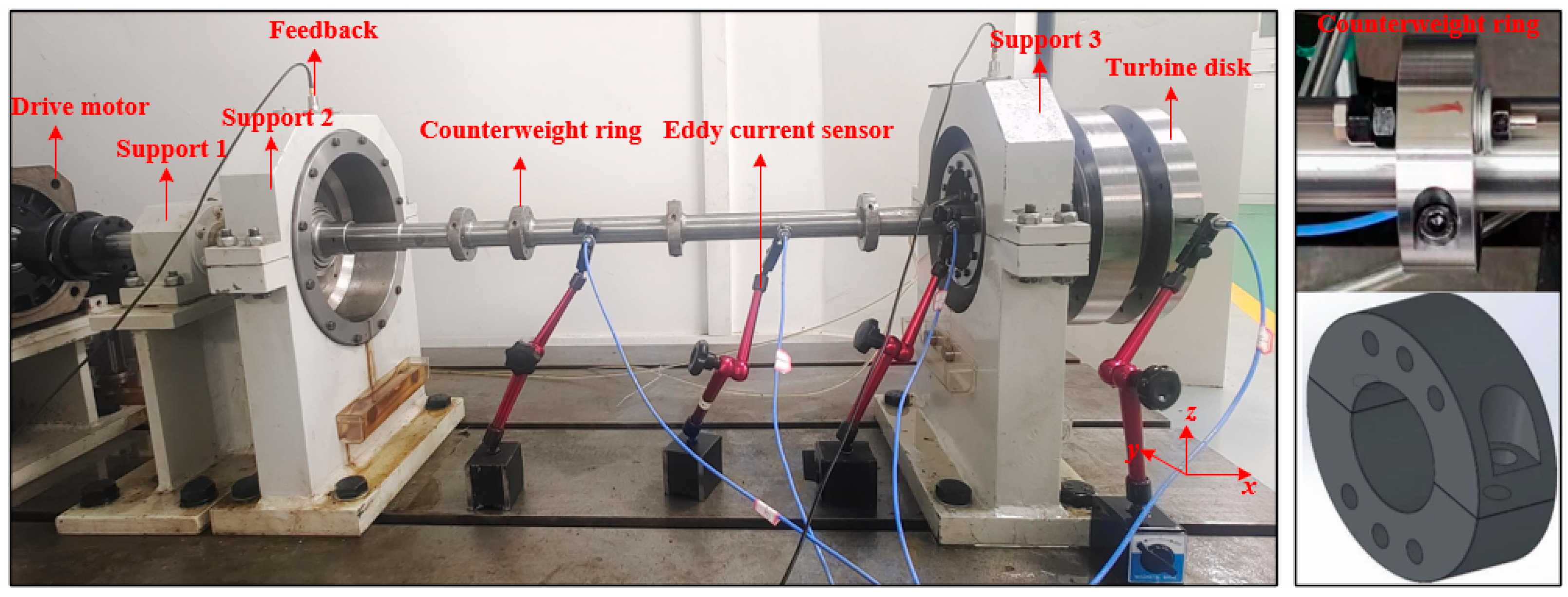
2.1. Turbine Rotor System
2.2. Dynamic Modeling of Flexible Cantilever Rotor System with Elastic Support
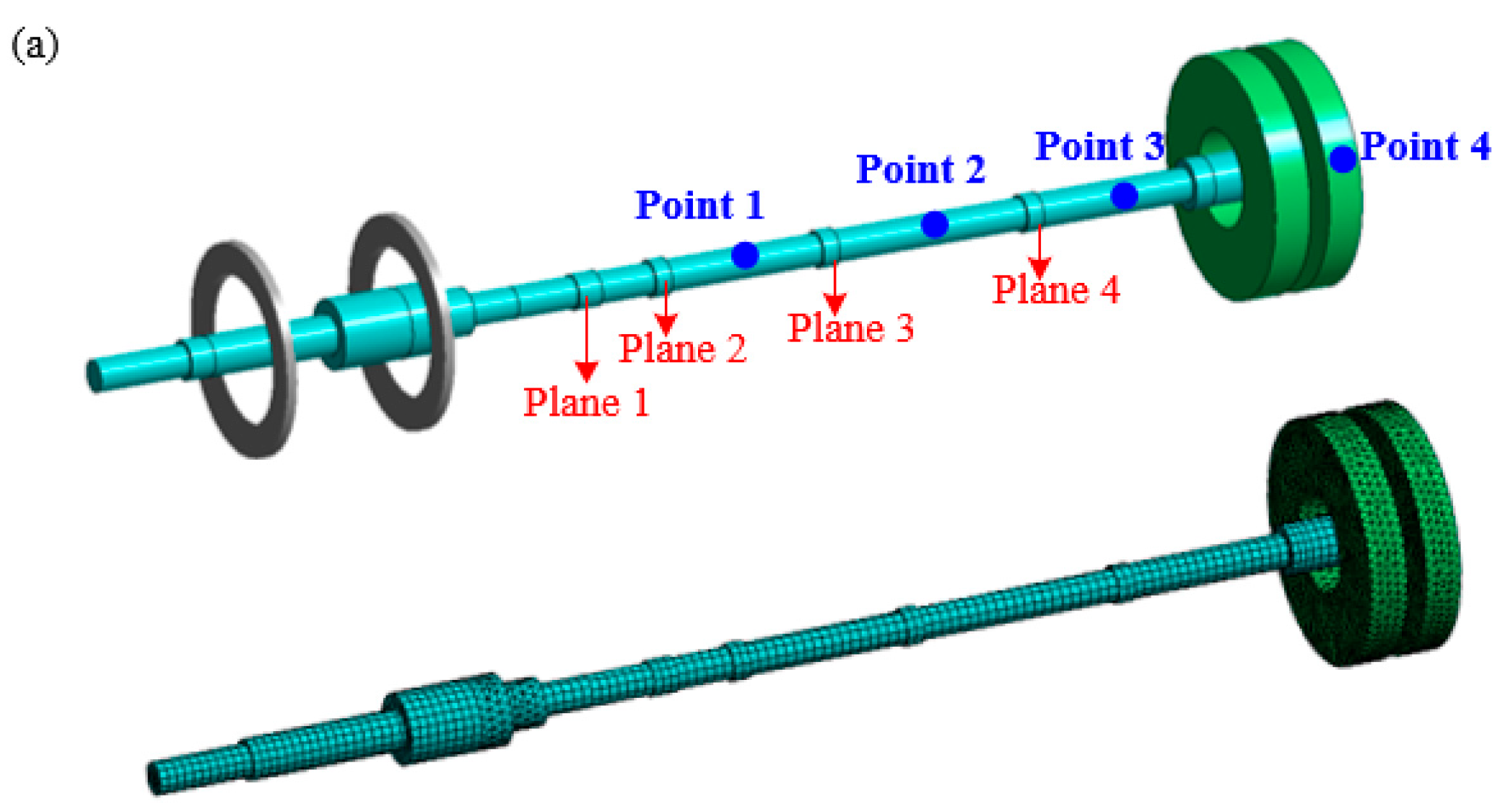
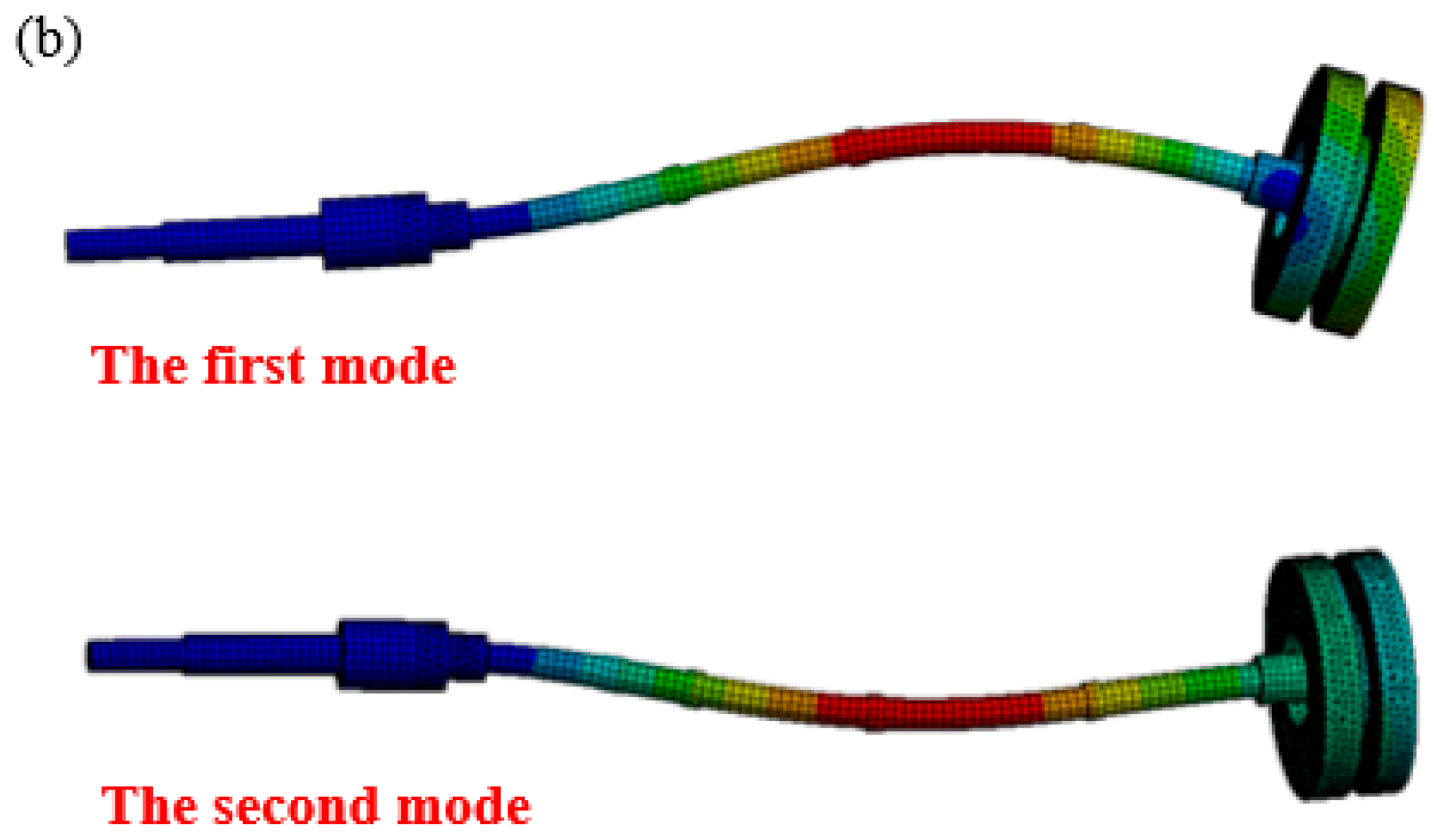
2.3. Model Verification
3. Analysis of Unbalance Phase Combined Vibration Response of Cantilever Rotor
3.1. Dynamic Balance of Rotor System Based on Transfer Function Method
3.1.1. Simulation Calculation
3.1.2. Experimental Verification
3.2. Effect of Rotor Phase Difference Combination on Unbalance Vibration Response
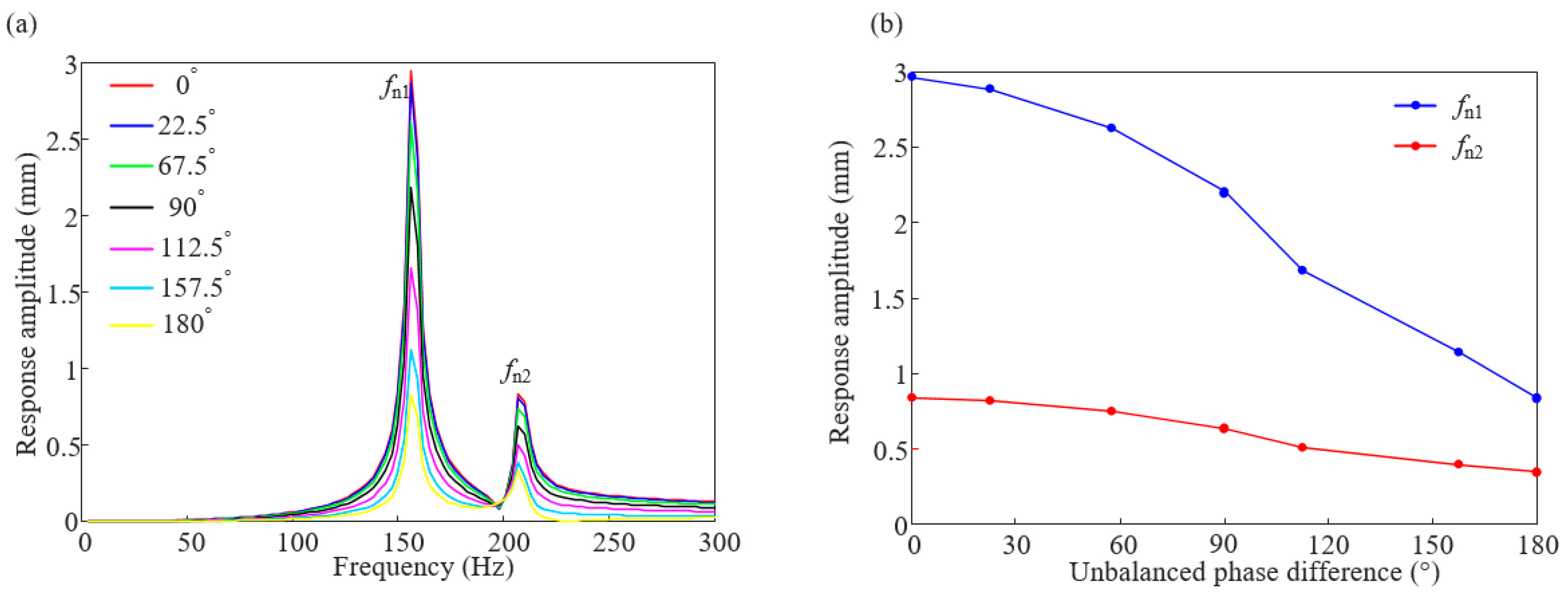
3.2.1. Simulation Analysis
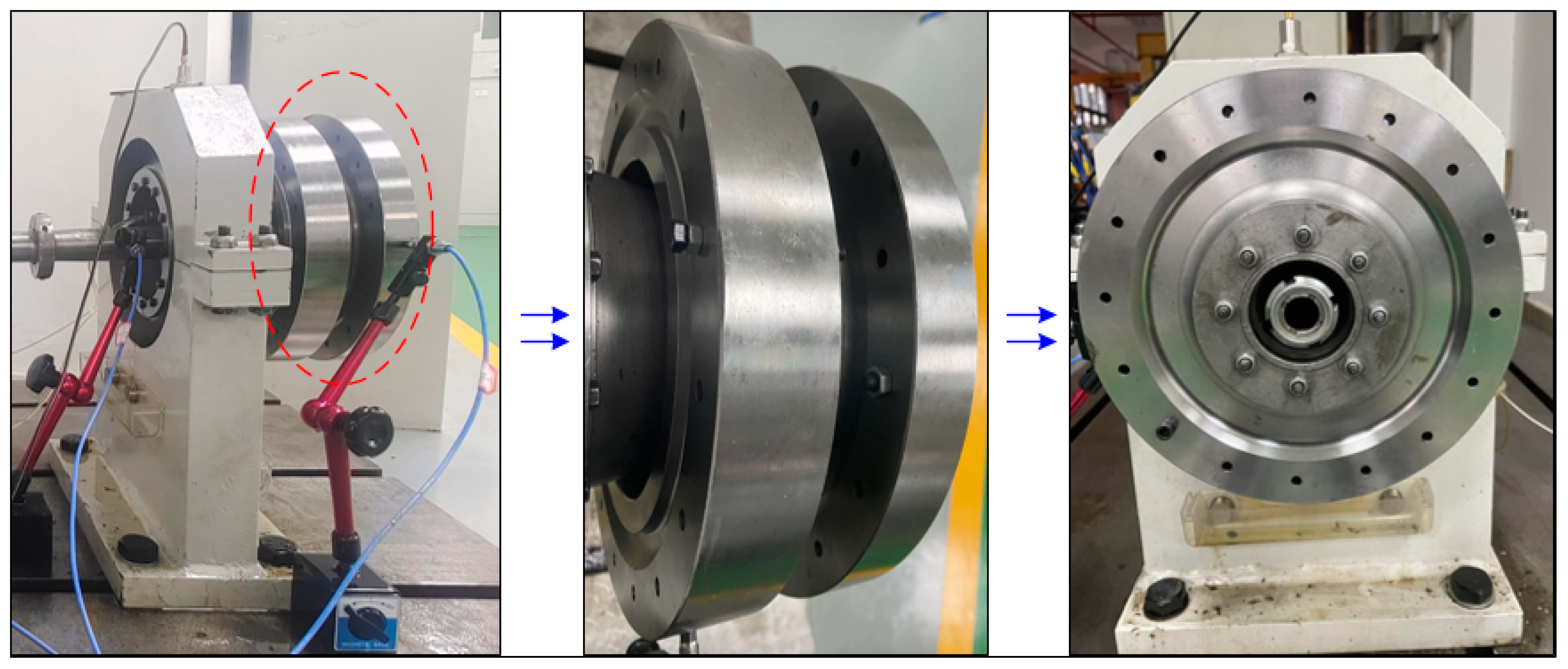
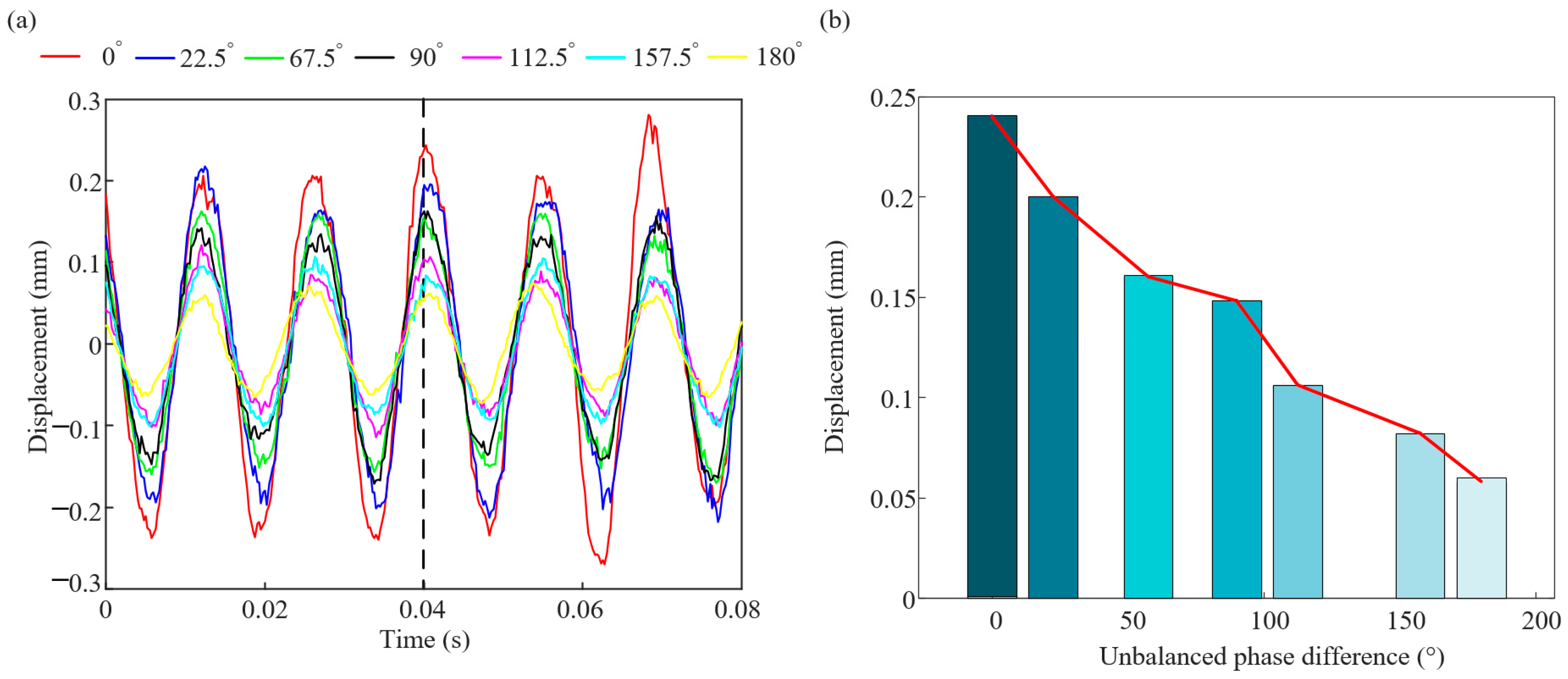
3.2.2. Test Verification
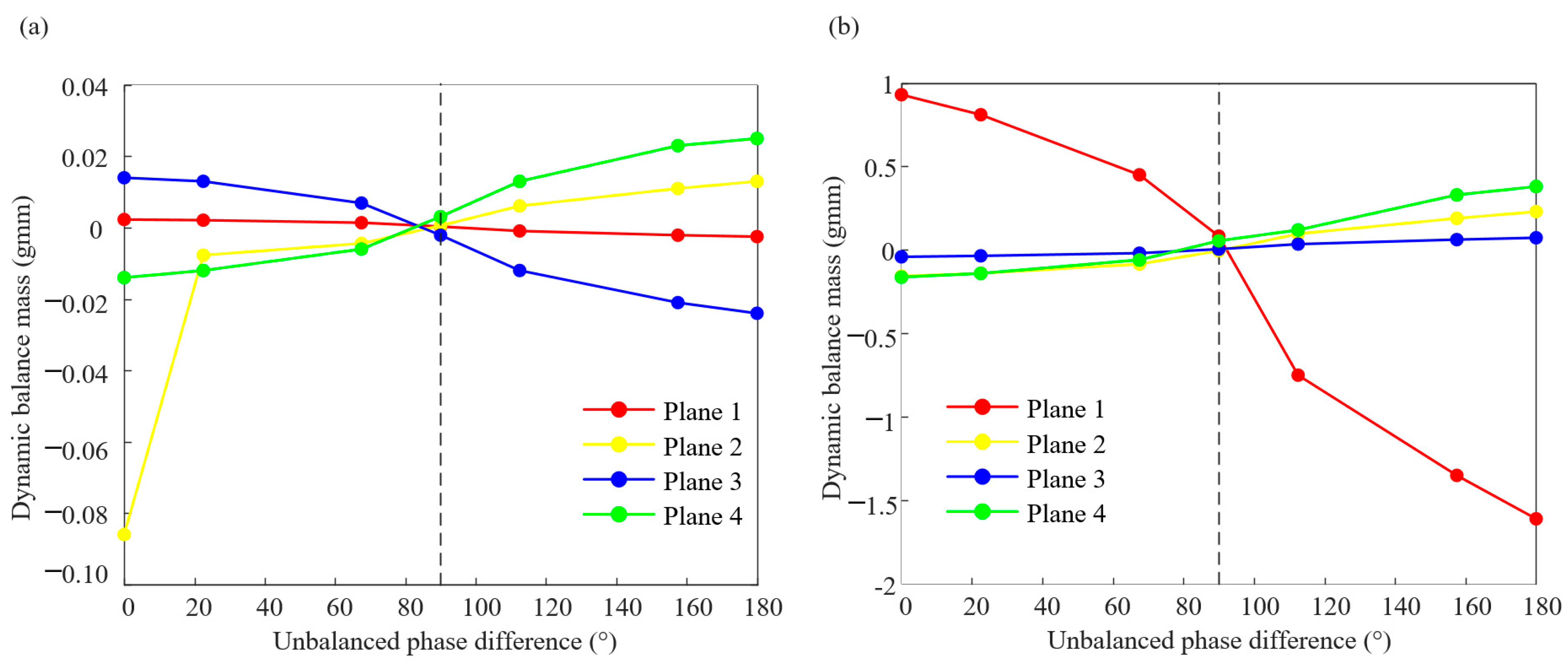
3.2.3. Analysis of Dynamic Balance Under Different Phase Difference Combinations
4. Conclusions
- (1)
- The rotor dynamic model based on the finite element method is analyzed by the transfer function method, and the vibration test bench is set up to verify the validity of the simulation results. On this basis, seven kinds of unbalance phase difference combinations are defined, and the influence of unbalance phase difference on rotor unbalance response and dynamic balance results is studied.
- (2)
- In the range of the first critical speed, the vibration amplitude caused by the unbalance of the reversed phase combination is reduced by 72% compared with that of the unbalance of the in-phase combination, and the vibration amplitude caused by the unbalance of the reversed phase combination is 59% of that of the second-critical speed. For the dynamic balance results, when the phase difference is 90°, the absolute value of the balance mass of the four counterweight planes is small. The combined vibration response law of the cantilever turbine rotor of the turboshaft engine with unbalanced phase difference considering the dynamic characteristics of the elastic support is studied in this paper, which can provide reference for rotor vibration fault analysis. It is worth noting that the conclusions of this paper are obtained in the research context of a cantilever rotor system. Due to the differences in factors such as mass distribution, stiffness distribution, and support conditions among different rotor systems, in practical applications, the conclusions of this study cannot be directly applied to other rotor systems. Instead, it is necessary to conduct analyses and experiments based on the specific rotor structures and parameters. Moreover, in practical engineering applications, the impacts of more complex factors need to be considered, such as the nonlinear characteristics of materials, the lubrication state of bearings, and system noise interference. These factors have not been taken into account in this study.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Che, X.; Zhu, R. Study on the effect of bearing position and stiffness on the dynamic behavior of output stage of CHT system based on the cylindrical gear meshing. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2024, 238, 9856–9877. [Google Scholar] [CrossRef]
- Yadao, A.R. Investigation of damaged structure in altered viscous fluid medium using multiple adaptive neurofuzzy inference system (MANFIS). Acta Mech. 2024, 235, 543–563. [Google Scholar] [CrossRef]
- Wen, B.G.; Wang, M.L.; Zhou, X.W.; Ren, H.; Han, Q. Multi-harmonic motions of bearing cage affected by rotor unbalance. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 2610–2625. [Google Scholar] [CrossRef]
- Lin, C.L.; Liang, J.W.; Huang, Y.M.; Huang, S.C. A novel model-based unbalance monitoring and prognostics for rotor-bearing systems. Adv. Mech. Eng. 2023, 15, 16878132221148019. [Google Scholar] [CrossRef]
- Yan, W.; He, L.D.; Deng, Z.; Jia, X. Experimental research on suppressing unbalanced vibration of rotor by integral squeeze film damper. Int. J. Turbo Jet Engines 2023, 40, 449–462. [Google Scholar] [CrossRef]
- Yang, T.G.; Li, G.C.; Li, K.T.; Li, X.; Han, Q. The LPST-Net: A new deep interval health monitoring and prediction framework for bearing-rotor systems under complex operating conditions. Adv. Eng. Inform. 2024, 62, 102558. [Google Scholar] [CrossRef]
- Li, L.; Luo, Z.; He, F.; Sun, K.; Yan, X. Experimental and numerical investigations on an unbalance identification method for full-size rotor system based on scaled model. J. Sound Vib. 2022, 527, 116868. [Google Scholar] [CrossRef]
- Gohari, M.; Eydi, A. Modelling of shaft unbalance: Modelling a multi discs rotor using K-Nearest Neighbor and Decision Tree Algorithms. Measurement 2020, 151, 107253. [Google Scholar] [CrossRef]
- Hong, J.; Yu, P.C.; Ma, Y.H.; Zhang, D. Investigation on nonlinear lateral-torsional coupled vibration of a rotor system with substantial unbalance. Chin. J. Aeronaut. 2020, 33, 1642–1660. [Google Scholar] [CrossRef]
- Zhang, Y.; Xie, Z.; Zhai, L.; Shao, M. Unbalanced vibration suppression of a rotor with Rotating-Frequency faults using signal purification. Mech. Syst. Signal Process. 2023, 190, 110153. [Google Scholar] [CrossRef]
- Zhao, H.; Fu, C.; Zhang, Y.; Zhu, W.; Lu, K.; Francis, E.M. Dimensional decomposition-aided metamodels for uncertainty quantification and optimization in engineering: A review. Comput. Methods Appl. Mech. Eng. 2024, 428, 117098. [Google Scholar] [CrossRef]
- Gu, Y.; Ma, Y.; Ren, G. Stability and vibration characteristics of a rotor-gas foil bearings system with high-static-low-dynamic-stiffness supports. J. Sound Vib. 2017, 397, 152–170. [Google Scholar] [CrossRef]
- Kang, Y.; Cao, S.; Hou, Y.; Chen, N. Analysis of backward whirling characteristics of a dual-rotor system caused by unbalance. Measurement 2022, 203, 111982. [Google Scholar] [CrossRef]
- Song, L.; Chen, Y. A prediction model of two-sided unbalance in the multi-stage assembled rotor of an aero engine. Machines 2024, 12, 503. [Google Scholar] [CrossRef]
- Xiang, B.; Wen, T.; Liu, Z. Vibration analysis, measurement and balancing of flywheel rotor suspended by active magnetic bearing. Measurement 2022, 197, 111305. [Google Scholar] [CrossRef]
- Nayek, B.; Das, A.S.; Dutt, J.K. Model based estimation of inertial parameters of a rigid rotor having dynamic unbalance on active magnetic bearings in presence of noise. Appl. Math. Model. 2021, 97, 701–720. [Google Scholar] [CrossRef]
- Jiang, K.J.; Zhu, C.S.; Chen, L.L. Unbalance compensation by recursive seeking unbalance mass position in active magnetic bearing-rotor system. IEEE Trans. Ind. Electron. 2015, 62, 5655–5664. [Google Scholar]
- Mao, C.; Zhu, C.S. Unbalance Compensation for active magnetic bearing rotor system using a variable step size real-time iterative seeking algorithm. IEEE Trans. Ind. Electron. 2017, 65, 4177–4186. [Google Scholar]
- Han, S.; Wang, Z.; Zhang, H.; Zhang, F.; Qingkai, H. Flexible rotor unbalance fault location method based on transfer learning from simulation to experiment data. Meas. Sci. Technol. 2023, 34, 125053. [Google Scholar] [CrossRef]
- Han, S.; Yang, T.G.; Zhu, J.Y.; Zhao, Y. Unbalance position of aeroengine flexible rotor analysis and identification based on dynamic model and deep learning. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2023, 237, 4410–4429. [Google Scholar] [CrossRef]
- Han, S.; Zhang, H.; Zhu, J.Y.; Meng, X.; Han, Q. Nonlinear vibration characteristics of an aeroengine cantilever flexible rotor considering interference fit and unbalance. Mech. Based Des. Struct. Mach. 2024, 52, 9306–9333. [Google Scholar] [CrossRef]
- Ma, P.P.; Zhai, J.Y.; Wang, Z.H.M.; Zhang, H.; Han, Q. Unbalance vibration characteristics and sensitivity analysis of the dual-rotor system in aeroengines. J. Aerosp. Eng. 2021, 34, 04020094. [Google Scholar] [CrossRef]
- Wang, A.; Yao, W.; He, K.; Meng, G.; Cheng, X.; Yang, J. Analytical modelling and numerical experiment for simultaneous identification of unbalance and rolling-bearing coefficients of the continuous single-disc and single-span rotor-bearing system with Rayleigh beam model. Mech. Syst. Signal Process. 2019, 116, 322–346. [Google Scholar] [CrossRef]
- Han, B.; Liu, Z.; He, P.; Yan, P. Rotor crack breathing under unbalanced disturbance. J. Sound Vib. 2024, 574, 118236. [Google Scholar] [CrossRef]
- Wang, S.; Zi, Y.; Qian, S.; Zi, B.; Bi, C. Effects of unbalance on the nonlinear dynamics of rotors with transverse cracks. Nonlinear Dyn. 2018, 91, 2755–2772. [Google Scholar] [CrossRef]
- Spagnol, J.P.; Wu, H.; Xiao, K. Dynamic response of a cracked rotor with an unbalance influenced breathing mechanism. J. Mech. Sci. Technol. 2018, 32, 57–68. [Google Scholar] [CrossRef]
- Zhou, J.; Wu, H.C.; Wang, W.Y.; Yang, K.; Hu, Y.; Guo, X.; Song, C. Online unbalance compensation of a maglev rotor with two active magnetic bearings based on the LMS algorithm and the influence coefficient method. Mech. Syst. Signal Process. 2022, 166, 108460. [Google Scholar]
- Yang, Y.; Cao, D.Q.; Wang, D.Y.; Jiang, G. Response analysis of a dual-disc rotor system with multi-unbalances multi-fixed-point rubbing faults. Nonlinear Dyn. 2017, 87, 109–125. [Google Scholar] [CrossRef]
- Wang, Q.P.; Wang, F.; Zhang, W.C.; Zhang, W.F. Influences of unbalance phase combination on the dynamic characteristics for a turboprop engine. Int. J. Turbo Jet-Engines 2023, 41, 317–331. [Google Scholar]
- Wang, L.; Wang, A.; Yin, Y.; Heng, X.; Jin, M. Effects of unbalance orientation on the dynamic characteristics of a double overhung rotor system for high-speed turbochargers. Nonlinear Dyn. 2021, 107, 665–681. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, J.; Shi, W.S.V. Synchronization of three rigid frames and two counter-rotating unbalanced rotors in a vibration system. Nonlinear Dyn. 2024, 112, 5317–5334. [Google Scholar] [CrossRef]
- Zhao, S.B.; Ren, X.M.; Zheng, Q.Y.; Lu, K.; Fu, C.; Yang, Y. Transient dynamic balancing of the rotor system with uncertainty. Mech. Syst. Signal Process. 2022, 171, 108894. [Google Scholar] [CrossRef]
- Chung, Y.H.; Chen, Y.L. Adaptive vision-based method for rotor dynamic balance system. IEEE Access 2021, 9, 22996–23006. [Google Scholar] [CrossRef]
- Wang, Z.; Li, D.; Wang, Z.; Liu, A.; Tao, R. Research on dynamic balance of spindle rotor system based on particle swarm optimization. Adv. Mater. Sci. Eng. 2021, 2021, 9728248. [Google Scholar] [CrossRef]
- Zhang, F.; Li, X.; Han, Q.; Guo, S.; Han, S.; Zhang, H. Research on dynamic balance optimization method of flexible rotor based on GWO. Meas. Sci. Technol. 2024, 35, 106108. [Google Scholar] [CrossRef]
- Bin, G.; Li, X.; Wu, J.; Gao, J. Virtual dynamic balancing method without trial weights for multi-rotor series shafting based on finite element model analysis. J. Renew. Sustain. Energy 2014, 6, 130–136. [Google Scholar] [CrossRef]
- Ranjan, G.; Tiwari, R. On-site high-speed balancing of flexible rotor-bearing system using virtual trial unbalances at slow run. Int. J. Mech. Sci. 2020, 183, 105786. [Google Scholar] [CrossRef]
- Yao, J.; Yang, F.; Su, Y.; Scarpa, F.; Gao, J. Balancing optimization of a multiple speeds flexible rotor. J. Sound Vib. 2020, 480, 115405. [Google Scholar] [CrossRef]
- Wang, W.B.; Song, P.Y.; Yu, H.C. Research on vibration amplitude of ultra-precision aerostatic motorized spindle under the combined action of rotor unbalance and hydrodynamic effect. Sensors 2023, 23, 496. [Google Scholar] [CrossRef]
- Zhao, B.B.; Mu, X.K.; Sun, Q.C. A novel APA model integrating manufacturing errors and barycenter characteristic for assembly unbalance optimization. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2025. [Google Scholar] [CrossRef]
- Wang, P.; Zhao, X.; Xu, H.; Ma, H.; Yin, X.; Zhang, X.; Zhao, S. Nonlinear dynamic behaviors of a shaft-bearing-pedestal system with outer ring slip and damage. Nonlinear Dyn. 2024, 113, 3171–3199. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Total mass of disk (kg) | 14.58 |
| Disk diameter moment of inertia (kg·m2) | 0.12 |
| Disk polar moment of inertia (kg·m2) | 0.13 |
| density (kg/m3) | 7800 |
| Modulus of elasticity (Pa) | 2.6 × 1011 |
| Poisson’s ratio | 0.3 |
| K1 (N/m) | 1 × 108 |
| K2 (N/m) | 1 × 107 |
| K3 (N/m) | 1 × 107 |
| K4 (N/m) | 2 × 108 |
| K5 (N/m) | 1 × 107 |
| Balancing Speed (r/min) | Counterweight Plane 1 | Counterweight Plane 2 | Counterweight Plane 3 | Counterweight Plane 4 |
|---|---|---|---|---|
| 4860 | 0.0023 gmm, −30.91° | −0.086 gmm, −88.31° | 0.014 gmm, 61.62° | −0.014 gmm, 58.13° |
| 5400 | 0.93 gmm, −53.87° | −0.157 gmm, −89.99° | −0.041 gmm, 99.56° | −0.163 gmm, −16.64° |
| Balancing Speed (r/min) | Counterweight Plane 1 | Counterweight Plane 2 | Counterweight Plane 3 | Counterweight Plane 4 |
|---|---|---|---|---|
| 0° | 0.0023 gmm, 30.9° | −0.086 gmm, −88.31° | 0.014 gmm, −61.62° | −0.014 gmm, 58.13° |
| 22.5° | 0.0021 gmm, 29.2° | −0.0077 gmm, 102.61° | 0.013 gmm, −96.62° | −0.012 gmm, −111.51° |
| 67.5° | 0.0014 gmm, −47.11° | −0.0044 gmm, 97.79° | 0.0069 gmm, −32.3° | −0.006 gmm, −110.7° |
| 90° | 0.00033 gmm, −152.6° | 0.00058 gmm, 92.12° | −0.0021 gmm, 61.84° | 0.0031 gmm, −110.97° |
| 112.5° | −0.00092 gmm, −50.09° | 0.0061 gmm, −7.2° | −0.012 gmm, 96.64° | 0.013 gmm, 67.13° |
| 157.5° | −0.0021 gmm, 3.03° | 0.011 gmm, −3.08° | −0.021 gmm, 37.36° | 0.023 gmm, 46.21° |
| 180° | −0.0025 gmm, 18.79° | 0.013 gmm, −4.06° | −0.024 gmm, −24.77° | 0.025 gmm, 59.16° |
| Balancing Speed (r/min) | Counterweight Plane 1 | Counterweight Plane 2 | Counterweight Plane 3 | Counterweight Plane 4 |
|---|---|---|---|---|
| 0° | 0.93 gmm, −53.87° | −0.157 gmm, −89.99° | −0.041 gmm, 99.56° | −0.163 gmm, −16.64° |
| 22.5° | 0.81 gmm, −77.59° | −0.14 gmm, −140.86° | −0.035 gmm, 142.62° | −0.14 gmm, −0.4° |
| 67.5° | 0.45 gmm, −101.51° | −0.084 gmm, −174.84° | −0.019 gmm, −169.6° | −0.059 gmm, −24.99° |
| 90° | −0.083 gmm, −118.86° | −0.0043 gmm, 122.2° | 0.0048 gmm, −167.84° | 0.055 gmm, 55.3° |
| 112.5° | −0.75 gmm, 85.6° | 0.097 gmm, 117.39° | 0.035 gmm, −26.03° | 0.12 gmm, −69.85° |
| 157.5° | −1.35 gmm, 57.79° | 0.19 gmm, −94.84° | 0.062 gmm, −159.35° | 0.33 gmm, −79.6° |
| 180° | −1.61 gmm, 18.79° | 0.23 gmm, −161.2° | 0.073 gmm, −119.99° | 0.38 gmm, −40.4° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Zhong, S.; Li, X.; Li, M.; Bian, J. Study on the Influence of Unbalanced Phase Difference Combinations on Vibration Characteristics of Rotor Systems. Sensors 2025, 25, 1691. https://doi.org/10.3390/s25061691
Cao Y, Zhong S, Li X, Li M, Bian J. Study on the Influence of Unbalanced Phase Difference Combinations on Vibration Characteristics of Rotor Systems. Sensors. 2025; 25(6):1691. https://doi.org/10.3390/s25061691
Chicago/Turabian StyleCao, Yiming, Shijie Zhong, Xuejun Li, Mingfeng Li, and Jie Bian. 2025. "Study on the Influence of Unbalanced Phase Difference Combinations on Vibration Characteristics of Rotor Systems" Sensors 25, no. 6: 1691. https://doi.org/10.3390/s25061691
APA StyleCao, Y., Zhong, S., Li, X., Li, M., & Bian, J. (2025). Study on the Influence of Unbalanced Phase Difference Combinations on Vibration Characteristics of Rotor Systems. Sensors, 25(6), 1691. https://doi.org/10.3390/s25061691