
Indoor Localization Methods for Smartphones with Multi-Source Sensors Fusion: Tasks, Challenges, Strategies, and Perspectives




Abstract
:1. Introduction
1.1. Existing Related Surveys
1.2. Key Contributions
- In this study, we detail the current research status of smartphone-based indoor positioning methods, categorize and analyze the characteristics of commonly used indoor positioning techniques, and categorize and describe these techniques. By reviewing the existing literature, we summarize the basic principles, advantages, and limitations of various techniques.
- Based on the mainstream indoor positioning technologies on smartphones, we conducted a detailed review and analyzed the existing indoor positioning methods and the main features of the latest research for each technology. Each technology is summarized and its performance in terms of indoor positioning performance is analyzed.
- We examine and classify the indoor positioning methods commonly used for fusing multi-source sensors in recent years, introduce the principles and characteristics of each fusion method, and analyze and summarize the related articles in recent years. We discuss how the fusion methods can improve the positioning accuracy and robustness as well as the limitations.
- We examine and classify smartphone-based single-sensor localization techniques and multi-source sensor fusion localization techniques. Based on these challenges, we suggest directions for future optimization of indoor positioning techniques.
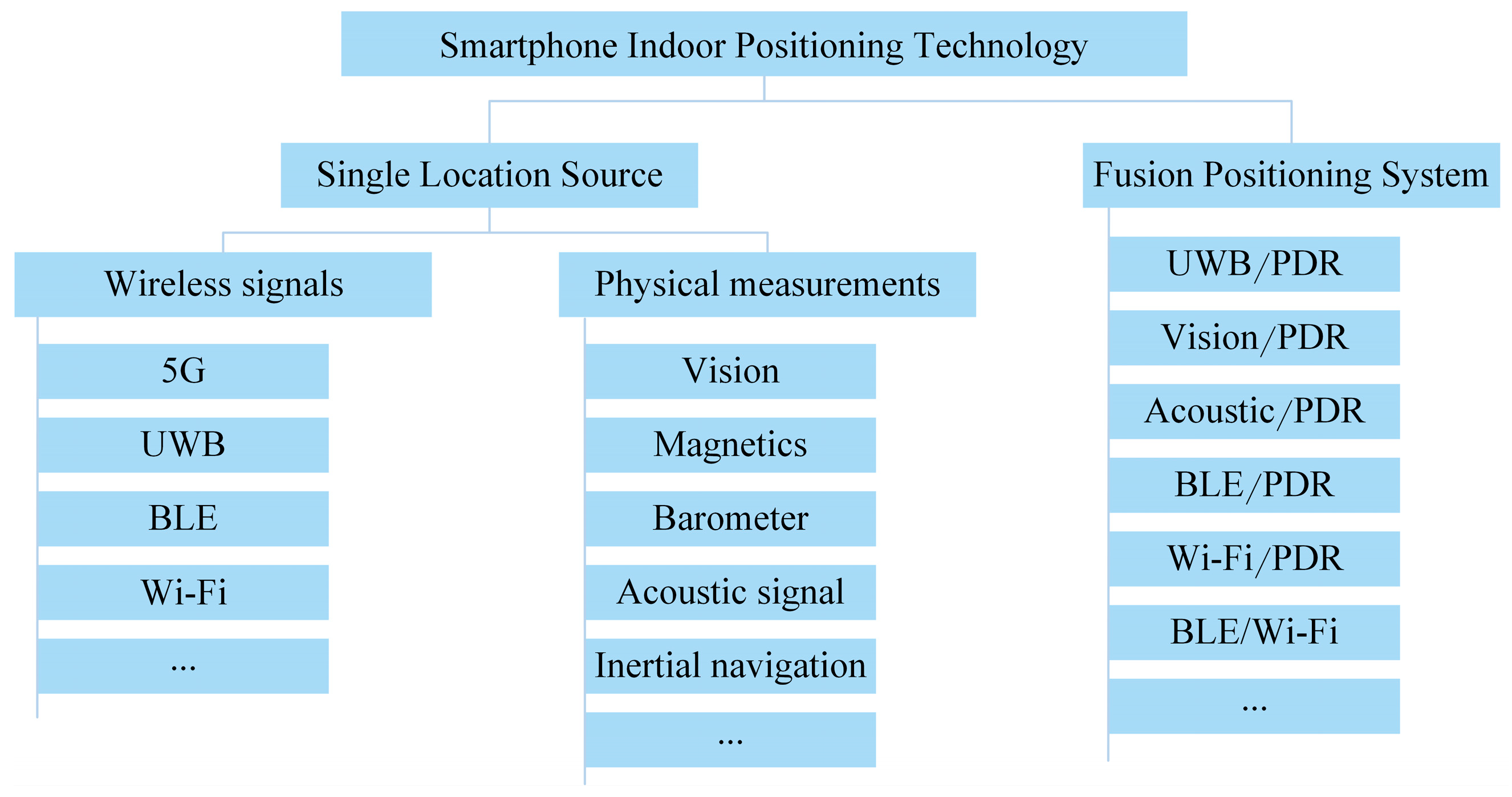
2. Smartphone Indoor Positioning Methods
2.1. Single Sensor-Based Indoor Localization Method for Smartphones
2.1.1. Wi-Fi-Based Indoor Localization Method
2.1.2. Bluetooth-Based Indoor Localization Method
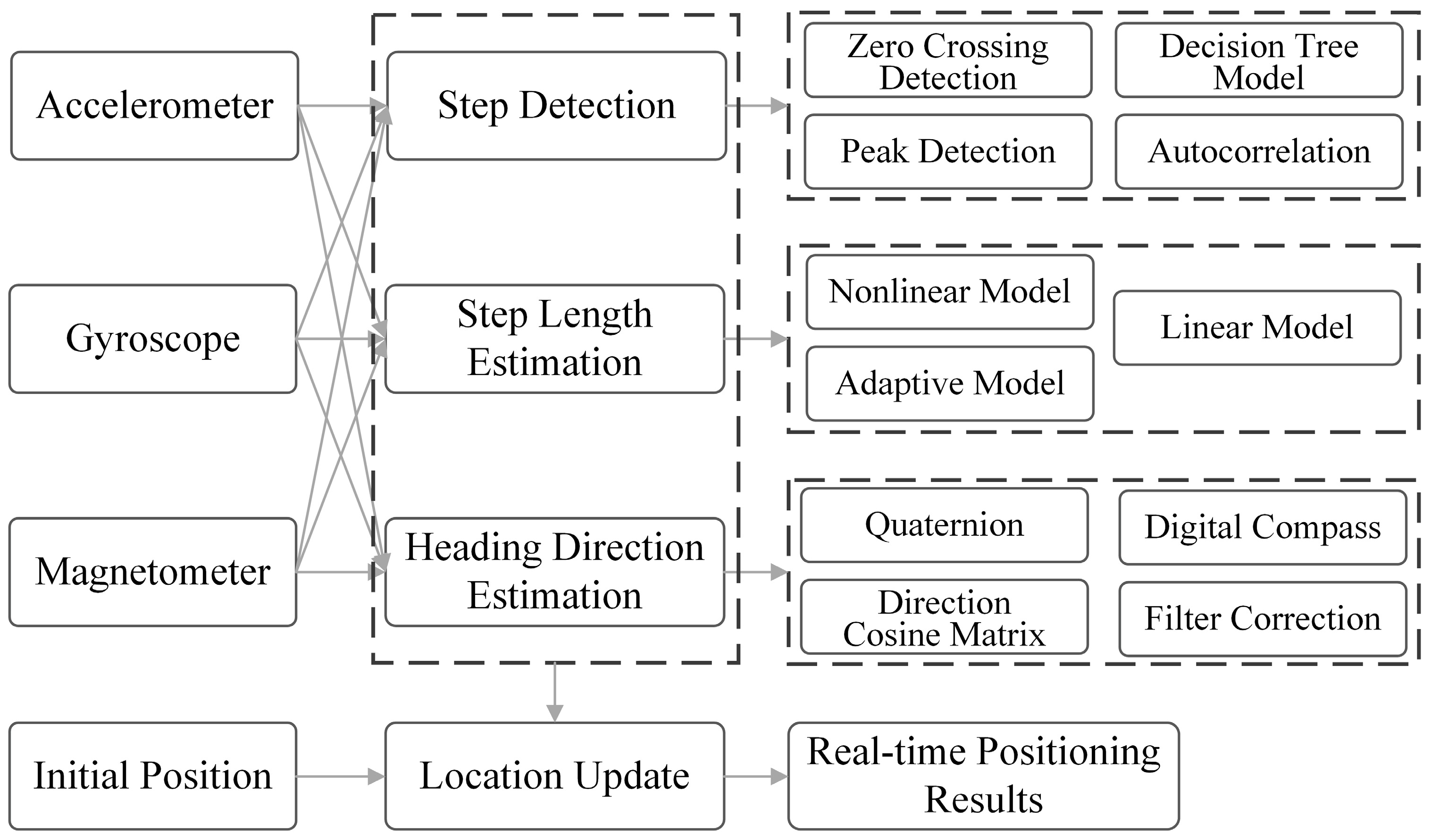
2.1.3. Inertial Sensors-Based Indoor Localization Method
Accelerometer
Gyroscope
Magnetometer
Inertial Sensor Fusion for Indoor Localization
2.1.4. Barometer-Based Indoor Localization Method
2.1.5. Vision-Based Indoor Localization Method
2.1.6. Acoustic Sensor-Based Indoor Localization Method
2.1.7. UWB-Based Indoor Localization Method
2.1.8. Other Indoor Location Methods
2.1.9. Challenges
- It is often difficult for a single sensor technology to provide continuous, high-precision localization services under all conditions. For example, Wi-Fi and BLE signals are highly affected by building structures, while visual or audio localization is susceptible to light conditions and noise levels.
- Single sensors in localization have poor stability, such as the error accumulation problem of inertial sensors and the localization errors caused by the non-visual distance and multipath effect problems of BLE and Wi-Fi.
- Deploying a high-density sensor network to achieve sufficient coverage and accuracy may increase the cost burden and implementation complexity, especially for indoor environments with large areas or complex structures.
- Indoor environments change frequently, due to factors such as crowd movement and the addition of temporary obstacles, and it is often difficult for a single sensor solution to adapt to these changes in real-time, which affects the localization results.
2.2. Fusion of Multi-Source Sensors for Indoor Localization of Smartphone
2.2.1. Fusion of Wi-Fi and Inertial Sensors for Indoor Localization
2.2.2. Fusion of BLE and Inertial Sensors for Indoor Localization
2.2.3. Fusion of Acoustic Signals and Inertial Sensors for Indoor Localization
2.2.4. Fusion of Vision and Inertial Sensors for Indoor Localization
2.2.5. Other Integration Methods
2.2.6. Challenges
- Existing multi-source fusion positioning solutions are usually optimized for a certain type of indoor scene or a specific user to achieve good positioning performance. However, the diversity of indoor environments introduces unique layouts, structures, and walking modes that can potentially impact the accuracy of indoor localization.
- Given the widespread use of Wi-Fi and BLE, a growing number of indoor positioning systems incorporate wireless positioning technologies alongside IMU integrated into smartphones. This approach offers extensive coverage and system capacity; however, its accuracy is susceptible to multipath interference and NLOS conditions.
- To improve indoor positioning accuracy, the existing methods are often realized by increasing the number of sensors, amount of data, and algorithm complexity, but this will also lead to higher implementation costs and operational and maintenance expenses for the system.
- Some fusion positioning systems, which lack inertial sensors, can utilize the complementary physical characteristics of wireless technologies to compensate for each other and serve as a class of indoor positioning solutions. However, these systems face challenges in acquiring velocity and attitude information, similar to inertial sensors, and may be influenced by low sampling rates.
3. Conclusions and Discussion
- Building maps can be constructed to constrain the indoor positioning of cell phones, constraining and matching the indoor positioning results by the a priori information of the building maps as well as the geometrical semantic and positional information contained in the building maps, so as to correct the coordinate information of the indoor positioning. In addition, accurate identification of the entrance location and floor identification of the building helps to construct a seamless indoor and outdoor localization system.
- The deployment of additional facilities required in an indoor positioning system, such as wireless access points and BLE beacons, is also an important part of the system. The deployment location of these devices affects both the system implementation cost and positioning accuracy. By improving the wireless beacon location deployment algorithm to determine the optimal location for each beacon, the coverage of the wireless signals can be fully utilized. This reduces the number of wireless beacons needed, lowers the system cost, and reduces the measurement noise of the signals.
- Multipath and NLOS issues seriously affect the accuracy of wireless localization. Future work may focus on detecting and mitigating these problems in integrated systems. Signal-processing algorithms can be implemented to identify and filter out multipath components, thereby improving the quality of received signals. Machine learning models can be trained using historical datasets to recognize patterns indicative of multipath and NLOS conditions. Furthermore, multi-source sensors can aid in the detection of multipath and NLOS through environmental awareness or by cross-verifying measurement results.
- PDR systems based on artificial intelligence represent a forward-looking research field. The grip position of smartphones can introduce errors in the heading estimation of PDR systems. To mitigate this, data from the smartphone’s built-in accelerometer, gyroscope, and magnetometer can be used to train machine learning models to detect user behaviors such as holding the phone in hand, in a pocket, or in a bag, thereby adjusting the heading estimation accordingly. Context-aware algorithms can also dynamically correct headings based on real-time behavior and the environment. Furthermore, by incorporating a big data artificial intelligence mechanism for the adaptive adjustment of step length estimates, individual differences like gender, body type, and height can be considered, thus improving the accuracy of indoor positioning.
- Some indoor localization methods are only oriented to a certain type of indoor scene, but indoor environments are complex and varied, including rooms, corridors, halls, staircases, elevators, large arenas, warehouses, underground parking lots, and so on. The behavior of pedestrians is different in different indoor scenes, and the operation characteristics of the built-in sensors of smartphones are also different. Accurately identifying and sensing complex indoor scenes and optimizing their positioning weights for each sensor module in different scenes can help achieve high-precision indoor positioning in complex indoor environments.
- To achieve optimal position estimation, the integration of multiple localization technologies is crucial. Beyond traditional filtering algorithms for fusing positioning information from multiple sensors, methods based on graph optimization and deep learning have also been extensively researched. Graph optimization techniques can more accurately handle nonlinear and multimodal issues, making them particularly suitable for long-term tracking or complex environmental localization tasks. Deep learning approaches offer unique advantages in addressing multipath effects, NLOS errors, and dynamic environmental changes. Future research should focus on developing adaptive fusion techniques that not only automatically adjust parameters based on real-time environmental changes but also efficiently manage resource-constrained conditions, especially for mobile devices like smartphones.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Imam-Fulani, Y.O.; Faruk, N.; Sowande, O.A.; Abdulkarim, A.; Alozie, E.; Usman, A.D.; Adewole, K.S.; Oloyede, A.A.; Chiroma, H.; Garba, S.; et al. 5G Frequency Standardization, Technologies, Channel Models, and Network Deployment: Advances, Challenges, and Future Directions. Sustainability 2023, 15, 5173. [Google Scholar] [CrossRef]
- Panja, A.K.; Karim, S.F.; Neogy, S.; Chowdhury, C. A novel feature based ensemble learning model for indoor localization of smartphone users. Eng. Appl. Artif. Intell. 2022, 107, 104538. [Google Scholar] [CrossRef]
- Li, Q.Q.; Zhou, B.D.; Ma, W.; Xue, W.X. Research process of GIS-aided indoor localization. Acta Geod. Cartogr. Sin. 2019, 48, 1498–1506. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, X.; Li, Q.Q.; Fang, Z.X. A Visual-Based Approach for Indoor Radio Map Construction Using Smartphones. Sensors 2017, 17, 1790. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Park, Y. Application of Deep Convolutional Neural Networks and Smartphone Sensors for Indoor Localization. Appl. Sci. 2019, 9, 2337. [Google Scholar] [CrossRef]
- Furfari, F.; Crivello, A.; Baronti, P.; Barsocchi, P.; Girolami, M.; Palumbo, F.; Quezada-Gaibor, D.; Mendoza Silva, G.M.; Torres-Sospedra, J. Discovering location based services: A unified approach for heterogeneous indoor localization systems. Internet Things 2021, 13, 100334. [Google Scholar] [CrossRef]
- Furfari, F.; Girolami, M.; Barsocchi, P. Integrating Indoor Localization Systems Through a Handoff Protocol. IEEE J. Indoor Seamless Position. Navig. 2024, 2, 130–142. [Google Scholar] [CrossRef]
- Zhang, Z.Y.; He, S.B.; Shu, Y.C.; Shi, Z.G. A Self-Evolving WiFi-based Indoor Navigation System Using Smartphones. IEEE Trans. Mob. Comput. 2020, 19, 1760–1774. [Google Scholar] [CrossRef]
- Zhao, H.Y.; Cheng, W.L.; Yang, N.; Qiu, S.; Wang, Z.L.; Wang, J.J. Smartphone-Based 3D Indoor Pedestrian Positioning Through Multi-Modal Data Fusion. Sensors 2019, 19, 4554. [Google Scholar] [CrossRef] [PubMed]
- Ciabattoni, L.; Foresi, G.; Monteriù, A.; Pepa, L.; Pagnotta, D.P.; Spalazzi, L.; Verdini, F. Real time indoor localization integrating a model based pedestrian dead reckoning on smartphone and BLE beacons. J. Ambient Intell. Humaniz. Comput. 2019, 10, 1–12. [Google Scholar] [CrossRef]
- Chen, R.Z.; Guo, G.Y.; Chen, L.; Niu, X.G. Application Status, Development and Future Trend of High-Precision Indoor Navigation and Tracking. Geomat. Inf. Sci. Wuhan Univ. 2023, 48, 1591–1600. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, R.Z.; Chen, L.; Zheng, X.Y.; Wu, D.W.; Li, W.; Wu, Y. A Novel 3-D Indoor Localization Algorithm Based on BLE and Multiple Sensors. IEEE Internet Things J. 2021, 8, 9359–9372. [Google Scholar] [CrossRef]
- Van der Ham, M.F.S.; Zlatanova, S.; Verbree, E.; Voûte, R. Real Time Localization Of Assets in Hospitals Using QUUPPA Indoor Positioning Technology. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, IV-4/W1, 105–110. [Google Scholar] [CrossRef]
- Guo, G.Y.; Chen, R.Z.; Ye, F.; Liu, Z.Y.; Xu, S.H.; Huang, L.X.; Li, Z.; Qian, L. A Robust Integration Platform of Wi-Fi RTT, RSS Signal, and MEMS-IMU for Locating Commercial Smartphone Indoors. IEEE Internet Things J. 2022, 9, 16322–16331. [Google Scholar] [CrossRef]
- Kuang, J.; Niu, X.J.; Zhang, P.; Chen, X.G. Indoor Positioning Based on Pedestrian Dead Reckoning and Magnetic Field Matching for Smartphones. Sensors 2018, 18, 4142. [Google Scholar] [CrossRef]
- Guo, W.F.; Deng, Y.; Guo, C.; Qi, S.F.; Wang, J.R. Performance improvement of 5G positioning utilizing multi-antenna angle measurements. Satell. Navig. 2022, 3, 17. [Google Scholar] [CrossRef]
- Girard, G.; Côté, S.; Zlatanova, S.; Barette, Y.; St-Pierre, J.; Van Oosterom, P. Indoor Pedestrian Navigation Using Foot-Mounted IMU and Portable Ultrasound Range Sensors. Sensors 2011, 11, 7606–7624. [Google Scholar] [CrossRef]
- Liu, Z.Y.; Chen, R.Z.; Ye, F.; Guo, G.Y.; Li, Z.; Qian, L. Improved TOA Estimation Method for Acoustic Ranging in a Reverberant Environment. IEEE Sens. J. 2022, 22, 4844–4852. [Google Scholar] [CrossRef]
- Shi, Y.T.; Zhang, Y.B.; Li, Z.H.; Yuan, S.W.; Zhu, S.H. IMU/UWB Fusion Method Using a Complementary Filter and a Kalman Filter for Hybrid Upper Limb Motion Estimation. Sensors 2023, 23, 6700. [Google Scholar] [CrossRef]
- Sandoval, E.B.; Li, B.H.; Diakite, A.; Zhao, K.; Oliver, N.; Bednarz, T.; Zlatanova, S. Visually Impaired User Experience using a 3D-Enhanced Facility Management System for Indoors Navigation. In Proceedings of the Companion Publication of the 2020 International Conference on Multimodal Interaction, Virtual Event, Utrecht, The Netherlands, 25–29 October 2020; pp. 92–96. [Google Scholar]
- Sun, X.; Zhuang, Y.; Huai, J.Z.; Hua, L.C.; Chen, D.; Li, Y.; Cao, Y.; Chen, R.Z. RSS-Based Visible Light Positioning Using Nonlinear Optimization. IEEE Internet Things J. 2022, 9, 14137–14150. [Google Scholar] [CrossRef]
- Sousa, L.; Rocha, H.; Ribeiro, A.; Lobo, F. INEXT: A Computer System for Indoor Object Location using RFID. Anais Estendidos do Simpósio Brasileiro de Engenharia de Sistemas Computacionais (SBESC); 2023: Anais Estendidos do XIII Simpósio Brasileiro de Engenharia de Sistemas Computacionais. 2023. Available online: https://sol.sbc.org.br/index.php/sbesc_estendido/article/view/25859 (accessed on 12 October 2024). [CrossRef]
- Xu, W.; Cai, Y.X.; He, D.J.; Lin, J.R.; Zhang, F. FAST-LIO2: Fast Direct LiDAR-Inertial Odometry. IEEE Trans. Robot. 2022, 38, 2053–2073. [Google Scholar] [CrossRef]
- Zhuang, Y.; El-Sheimy, N. Tightly-Coupled Integration of WiFi and MEMS Sensors on Handheld Devices for Indoor Pedestrian Navigation. IEEE Sens. J. 2016, 16, 224–234. [Google Scholar] [CrossRef]
- Xing, Y.D.; Wu, H. Indoor dynamic positioning system based on strapdown inertial navigation technology. In Proceedings of the 2011 International Conference on Optical Instruments and Technology: Optoelectronic Measurement Technology and Systems, Beijing, China, 6–9 November 2011; p. 820115. [Google Scholar]
- Liu, T.; Niu, X.J.; Kuang, J.; Cao, S.; Zhang, L.; Chen, X. Doppler Shift Mitigation in Acoustic Positioning Based on Pedestrian Dead Reckoning for Smartphone. IEEE Trans. Instrum. Meas. 2021, 70, 9500211. [Google Scholar] [CrossRef]
- Yan, J.J.; Lee, J.B.; Zlatanova, S.; Diakité, A.A.; Kim, H. Navigation network derivation for QR code-based indoor pedestrian path planning. Trans. GIS 2022, 26, 1240–1255. [Google Scholar] [CrossRef]
- Xu, W.L.; Liu, L.; Zlatanova, S.; Penard, W.; Xiong, Q. A pedestrian tracking algorithm using grid-based indoor model. Autom. Constr. 2018, 92, 173–187. [Google Scholar] [CrossRef]
- Chen, C.; Wang, Y.C.; Chen, Y.W.; Jiang, C.H.; Jia, J.X.; Bo, Y.M.; Zhu, B.; Dai, H.J.; Hyyppä, J. An APDR/UPV/Light Multisensor-Based Indoor Positioning Method via Factor Graph Optimization. IEEE Trans. Instrum. Meas. 2024, 73, 1–17. [Google Scholar] [CrossRef]
- Morar, A.; Moldoveanu, A.; Mocanu, I.; Moldoveanu, F.; Radoi, I.E.; Asavei, V.; Gradinaru, A.; Butean, A. A Comprehensive Survey of Indoor Localization Methods Based on Computer Vision. Sensors 2020, 20, 2641. [Google Scholar] [CrossRef] [PubMed]
- Kunhoth, J.; Karkar, A.; Al-Maadeed, S.; Al-Ali, A. Indoor positioning and wayfinding systems: A survey. Hum.-Centric Comput. Inf. Sci. 2020, 10, 18. [Google Scholar] [CrossRef]
- Liu, M.N.; Cheng, L.S.; Qian, K.; Wang, J.L.; Wang, J.; Liu, Y.H. Indoor acoustic localization: A survey. Hum.-Centric Comput. Inf. Sci. 2020, 10, 2. [Google Scholar] [CrossRef]
- Guo, X.S.; Ansari, N.; Hu, F.Z.; Shao, Y.; Elikplim, N.R.; Li, L. A Survey on Fusion-Based Indoor Positioning. IEEE Commun. Surv. Tutor. 2020, 22, 566–594. [Google Scholar] [CrossRef]
- Liu, J.; Liu, H.B.; Chen, Y.Y.; Wang, Y.; Wang, C. Wireless Sensing for Human Activity: A Survey. IEEE Commun. Surv. Tutor. 2020, 22, 1629–1645. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Park, Y. Smartphone Sensor Based Indoor Positioning: Current Status, Opportunities, and Future Challenges. Electronics 2020, 9, 891. [Google Scholar] [CrossRef]
- Simões, W.C.S.S.; Machado, G.S.; Sales, A.M.A.; de Lucena, M.M.; Jazdi, N.; de Lucena, V.F. A Review of Technologies and Techniques for Indoor Navigation Systems for the Visually Impaired. Sensors 2020, 20, 3935. [Google Scholar] [CrossRef]
- Pascacio, P.; Casteleyn, S.; Torres-Sospedra, J.; Lohan, E.S.; Nurmi, J. Collaborative Indoor Positioning Systems: A Systematic Review. Sensors 2021, 21, 1002. [Google Scholar] [CrossRef]
- Obeidat, H.; Shuaieb, W.; Obeidat, O.; Abd-Alhameed, R. A Review of Indoor Localization Techniques and Wireless Technologies. Wirel. Pers. Commun. 2021, 119, 289–327. [Google Scholar] [CrossRef]
- Hou, X.Y.; Bergmann, J. Pedestrian Dead Reckoning with Wearable Sensors: A Systematic Review. IEEE Sens. J. 2021, 21, 143–152. [Google Scholar] [CrossRef]
- Ouyang, G.L.; Abed-Meraim, K. A Survey of Magnetic-Field-Based Indoor Localization. Electronics 2022, 11, 864. [Google Scholar] [CrossRef]
- Aparicio, J.; Álvarez, F.J.; Hernandez, Á.; Holm, S. A Survey on Acoustic Positioning Systems for Location-Based Services. IEEE Trans. Instrum. Meas. 2022, 71, 8505336. [Google Scholar] [CrossRef]
- Wang, Q.; Fu, M.X.; Wang, J.Q.; Luo, H.Y.; Sun, L.; Ma, Z.C.; Li, W.; Zhang, C.Y.; Huang, R.; Li, X.D.; et al. Recent Advances in Pedestrian Inertial Navigation Based on Smartphone: A Review. IEEE Sens. J. 2022, 22, 22319–22343. [Google Scholar] [CrossRef]
- Chen, C.H.; Pan, X.F. Deep Learning for Inertial Positioning: A Survey. IEEE Trans. Intell. Transp. Syst. 2024, 25, 10506–10523. [Google Scholar] [CrossRef]
- Naser, R.S.; Lam, M.C.; Qamar, F.; Zaidan, B.B. Smartphone-Based Indoor Localization Systems: A Systematic Literature Review. Electronics 2023, 12, 1814. [Google Scholar] [CrossRef]
- Zhuang, Y.; Sun, X.; Li, Y.; Huai, J.Z.; Hua, L.C.; Yang, X.S.; Cao, X.X.; Zhang, P.; Cao, Y.; Qi, L.N.; et al. Multi-sensor integrated navigation/positioning systems using data fusion: From analytics-based to learning-based approaches. Inf. Fusion 2023, 95, 62–90. [Google Scholar] [CrossRef]
- Zhuang, Y.; Zhang, C.Y.; Huai, J.Z.; Li, Y.; Chen, L.; Chen, R.Z. Bluetooth Localization Technology: Principles, Applications, and Future Trends. IEEE Internet Things J. 2022, 9, 23506–23524. [Google Scholar] [CrossRef]
- Leitch, S.G.; Ahmed, Q.Z.; Abbas, W.B.; Hafeez, M.; Laziridis, P.I.; Sureephong, P.; Alade, T. On Indoor Localization Using WiFi, BLE, UWB, and IMU Technologies. Sensors 2023, 23, 8598. [Google Scholar] [CrossRef]
- Kargar-Barzi, A.; Farahmand, E.; Chatrudi, N.T.; Mahani, A.; Shafique, M. An Edge-Based WiFi Fingerprinting Indoor Localization Using Convolutional Neural Network and Convolutional Auto-Encoder. IEEE Access 2024, 12, 85050–85060. [Google Scholar] [CrossRef]
- Amri, S.; Khelifi, F.; Bradai, A.; Rachedi, A.; Kaddachi, M.L.; Atri, M. A new fuzzy logic based node localization mechanism for Wireless Sensor Networks. Future Gener. Comput. Syst.-Int. J. Escience 2019, 93, 799–813. [Google Scholar] [CrossRef]
- Tao, Y.; Yan, R.e.; Zhao, L. An extreme value based algorithm for improving the accuracy of WiFi localization. Ad Hoc Netw. 2023, 143, 103131. [Google Scholar] [CrossRef]
- Vishwakarma, R.; Joshi, R.B.; Mishra, S. IndoorGNN: A Graph Neural Network Based Approach for Indoor Localization Using WiFi RSSI. In Proceedings of the Big Data and Artificial Intelligence, Delhi, India, 7–9 December 2023; pp. 150–165. [Google Scholar]
- Wang, X.Y.; Gao, L.J.; Mao, S.W.; Pandey, S. CSI-Based Fingerprinting for Indoor Localization: A Deep Learning Approach. IEEE Trans. Veh. Technol. 2017, 66, 763–776. [Google Scholar] [CrossRef]
- Lan, T.; Wang, X.; Chen, Z.; Zhu, J.; Zhang, S. Fingerprint Augment Based on Super-Resolution for WiFi Fingerprint Based Indoor Localization. IEEE Sens. J. 2022, 22, 12152–12162. [Google Scholar] [CrossRef]
- Wang, L.X.; Shang, S.; Wu, Z.N. Research on Indoor 3D Positioning Algorithm Based on WiFi Fingerprint. Sensors 2023, 23, 153. [Google Scholar] [CrossRef]
- Hosseini, H.; Taleai, M.; Zlatanova, S. NSGA-II based optimal Wi-Fi access point placement for indoor positioning: A BIM-based RSS prediction. Autom. Constr. 2023, 152, 104897. [Google Scholar] [CrossRef]
- Pan, L.; Zhang, H.; Zhang, L.Y.; Gao, R.; Zhang, Q. Indoor positioning fingerprint database construction based on CSA-DBSCAN and RCVAE-GAN. Phys. Scr. 2024, 99, 055002. [Google Scholar] [CrossRef]
- Huang, L.; Yu, B.G.; Li, H.S.; Zhang, H.; Li, S.; Zhu, R.H.; Li, Y.N. HPIPS: A High-Precision Indoor Pedestrian Positioning System Fusing WiFi-RTT, MEMS, and Map Information. Sensors 2020, 20, 6795. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Chen, R.Z.; Liu, Z.Y.; Guo, G.Y.; Ye, F.; Chen, L. Wi-Fi Fine Time Measurement: Data Analysis and Processing for Indoor Localisation. J. Navig. 2020, 73, 1106–1128. [Google Scholar] [CrossRef]
- Guo, X.C.; Wu, H.T. Framework and Methods of State Monitoring-Based Positioning System on WIFI-RTT Clock Drift Theory. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 685–697. [Google Scholar] [CrossRef]
- Cao, H.J.; Wang, Y.J.; Bi, J.X.; Zhang, Y.S.; Yao, G.B.; Feng, Y.G.; Si, M.H. LOS compensation and trusted NLOS recognition assisted WiFi RTT indoor positioning algorithm. Expert Syst. Appl. 2024, 243, 122867. [Google Scholar] [CrossRef]
- Feng, X.; Nguyen, K.A.; Luo, Z. A Wi-Fi RSS-RTT Indoor Positioning Model Based on Dynamic Model Switching Algorithm. IEEE J. Indoor Seamless Position. Navig. 2024, 2, 151–165. [Google Scholar] [CrossRef]
- Junoh, S.A.; Pyun, J.Y. Enhancing Indoor Localization with Semi-Crowdsourced Fingerprinting and GAN-Based Data Augmentation. IEEE Internet Things J. 2024, 11, 11945–11959. [Google Scholar] [CrossRef]
- Zhao, Y.; Yin, F.; Gunnarsson, F.; Amirijoo, M.; Özkan, E.; Gustafsson, F. Particle filtering for positioning based on proximity reports. In Proceedings of the 2015 18th International Conference on Information Fusion (Fusion), Washington, DC, USA, 6–9 July 2015; pp. 1046–1052. [Google Scholar]
- Huang, C.; Zhuang, Y.; Liu, H.; Li, J.Y.; Wang, W. A Performance Evaluation Framework for Direction Finding Using BLE AoA/AoD Receivers. IEEE Internet Things J. 2021, 8, 3331–3345. [Google Scholar] [CrossRef]
- You, Y.; Wu, C. Hybrid Indoor Positioning System for Pedestrians with Swinging Arms Based on Smartphone IMU and RSSI of BLE. IEEE Trans. Instrum. Meas. 2021, 70, 9510615. [Google Scholar] [CrossRef]
- Gentner, C.; Hager, P.; Ulmschneider, M. Server based Bluetooth Low Energy (BLE) Positioning using Received Signal Strength (RSS) Measurements. In Proceedings of the 2023 13th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nuremberg, Germany, 25–28 September 2023; pp. 1–7. [Google Scholar]
- Assayag, Y.; Oliveira, H.; Souto, E.; Barreto, R.; Pazzi, R. Adaptive Path Loss Model for BLE Indoor Positioning System. IEEE Internet Things J. 2023, 10, 12898–12907. [Google Scholar] [CrossRef]
- Wu, Z.T.; Ma, X.P.; Li, J.Y.; Wang, R.J.; Chen, F. Design of Indoor Navigation Scheme Based on Bluetooth Low Energy. In Proceedings of the 6th International Conference on Electrical Engineering and Information Technologies for Rail Transportation (EITRT), Beijing, China, 19–21 October 2023; pp. 561–569. [Google Scholar]
- Safwat, R.; Shaaban, E.; Al-Tabbakh, S.M.; Emara, K. Fingerprint-based indoor positioning system using BLE: Real deployment study. Bull. Electr. Eng. Informatics 2023, 12, 240–249. [Google Scholar] [CrossRef]
- Shin, B.; Ho Lee, J.; Lee, T. Novel indoor fingerprinting method based on RSS sequence matching. Measurement 2023, 223, 113719. [Google Scholar] [CrossRef]
- Xiao, D.S.; Hu, S.C.; Kang, K.; Qian, H. An Improved AoA Estimation Algorithm for BLE System in the Presence of Phase Noise. IEEE Trans. Consum. Electron. 2023, 69, 400–407. [Google Scholar] [CrossRef]
- Wan, Q.; Wu, T.; Zhang, K.H.; Liu, X.Y.; Cheng, K.; Liu, J.H.; Zhu, J. A high precision indoor positioning system of BLE AOA based on ISSS algorithm. Measurement 2024, 224, 113801. [Google Scholar] [CrossRef]
- Spachos, P.; Plataniotis, K.N. BLE Beacons for Indoor Positioning at an Interactive IoT-Based Smart Museum. IEEE Syst. J. 2020, 14, 3483–3493. [Google Scholar] [CrossRef]
- Yu, Y.; Zhang, Y.; Chen, L.; Chen, R.Z. Intelligent Fusion Structure for Wi-Fi/BLE/QR/MEMS Sensor-Based Indoor Localization. Remote Sens. 2023, 15, 1202. [Google Scholar] [CrossRef]
- Wang, B.Y.; Liu, X.L.; Yu, B.G.; Jia, R.C.; Huang, L. Posture Recognition and Heading Estimation Based on Machine Learning Using MEMS Sensors. In Proceedings of the Artificial Intelligence for Communications and Networks, Harbin, China, 25–26 May 2019; pp. 496–508. [Google Scholar]
- Ignatov, A. Real-time human activity recognition from accelerometer data using Convolutional Neural Networks. Appl. Soft Comput. 2018, 62, 915–922. [Google Scholar] [CrossRef]
- Jeon, J.s.; Kong, Y.; Nam, Y.; Yim, K. An Indoor Positioning System Using Bluetooth RSSI with an Accelerometer and a Barometer on a Smartphone. In Proceedings of the 2015 10th International Conference on Broadband and Wireless Computing, Communication and Applications (BWCCA), Krakow, Poland, 4–6 November 2015; pp. 528–531. [Google Scholar]
- Lee, K.; Nam, Y.; Min, S.D. An indoor localization solution using Bluetooth RSSI and multiple sensors on a smartphone. Multimed. Tools Appl. 2018, 77, 12635–12654. [Google Scholar] [CrossRef]
- Yan, K.; Chen, R.Z.; Guo, G.Y.; Chen, L. Locating Smartphone Indoors by Using Tightly Coupling Bluetooth Ranging and Accelerometer Measurements. Remote Sens. 2022, 14, 3468. [Google Scholar] [CrossRef]
- Bai, N.; Tian, Y.; Liu, Y.; Yuan, Z.X.; Xiao, Z.L.; Zhou, J. A High-Precision and Low-Cost IMU-Based Indoor Pedestrian Positioning Technique. IEEE Sens. J. 2020, 20, 6716–6726. [Google Scholar] [CrossRef]
- Chen, P.; Li, Z.; Zhang, S.P. Indoor PDR Trajectory Matching by Gyroscope and Accelerometer Signal Sequence Without Initial Motion State. IEEE Sens. J. 2023, 23, 15128–15139. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Park, Y. Enhancing Performance of Magnetic Field Based Indoor Localization Using Magnetic Patterns from Multiple Smartphones. Sensors 2020, 20, 2704. [Google Scholar] [CrossRef] [PubMed]
- Kuang, J.; Li, T.Y.; Niu, X.J. Magnetometer Bias Insensitive Magnetic Field Matching Based on Pedestrian Dead Reckoning for Smartphone Indoor Positioning. IEEE Sens. J. 2022, 22, 4790–4799. [Google Scholar] [CrossRef]
- Friad Qadr, R.; Maghdid, H.S.; Sabir, A.T. Novel Integration of Wi-Fi Signal and Magnetometer Sensor Measurements in Fingerprinting Technique for Indoors Smartphone positioning. ITM Web Conf. 2022, 42, 01016. [Google Scholar] [CrossRef]
- Zhao, H.Y.; Zhang, L.Y.; Qiu, S.; Wang, Z.L.; Yang, N.; Xu, J. Pedestrian Dead Reckoning Using Pocket-Worn Smartphone. IEEE Access 2019, 7, 91063–91073. [Google Scholar] [CrossRef]
- Kang, W.; Han, Y. SmartPDR: Smartphone-Based Pedestrian Dead Reckoning for Indoor Localization. IEEE Sens. J. 2015, 15, 2906–2916. [Google Scholar] [CrossRef]
- Mekruksavanich, S.; Jantawong, P.; Jitpattanakul, A. Deep Learning-based Action Recognition for Pedestrian Indoor Localization using Smartphone Inertial Sensors. In Proceedings of the 2022 Joint International Conference on Digital Arts, Media and Technology with ECTI Northern Section Conference on Electrical, Electronics, Computer and Telecommunications Engineering (ECTI DAMT & NCON), Chiang Rai, Thailand, 26–28 January 2022; pp. 346–349. [Google Scholar]
- Casado, F.E.; Rodríguez, G.; Iglesias, R.; Regueiro, C.V.; Barro, S.; Canedo-Rodríguez, A. Walking Recognition in Mobile Devices. Sensors 2020, 20, 1189. [Google Scholar] [CrossRef]
- Beauregard, S.; Haas, H. Pedestrian dead reckoning: A basis for personal positioning. In Proceedings of the 3rd Workshop on Positioning, Navigation and Communication, Bremen, Germany, 16 March 2006; pp. 27–35. [Google Scholar]
- Gu, F.Q.; Khoshelham, K.; Yu, C.Y.; Shang, J.G. Accurate Step Length Estimation for Pedestrian Dead Reckoning Localization Using Stacked Autoencoders. IEEE Trans. Instrum. Meas. 2019, 68, 2705–2713. [Google Scholar] [CrossRef]
- Poulose, A.; Eyobu, O.S.; Han, D.S. An Indoor Position-Estimation Algorithm Using Smartphone IMU Sensor Data. IEEE Access 2019, 7, 11165–11177. [Google Scholar] [CrossRef]
- Chen, G.L.; Meng, X.L.; Wang, Y.J.; Zhang, Y.Z.; Tian, P.; Yang, H.C. Integrated WiFi/PDR/Smartphone Using an Unscented Kalman Filter Algorithm for 3D Indoor Localization. Sensors 2015, 15, 24595–24614. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Zhu, H.B.; Du, Q.X.; Tang, S.M. A Pedestrian Dead-Reckoning System for Walking and Marking Time Mixed Movement Using an SHSs Scheme and a Foot-Mounted IMU. IEEE Sens. J. 2019, 19, 1661–1671. [Google Scholar] [CrossRef]
- Renaudin, V.; Combettes, C.; Peyret, F. Quaternion based heading estimation with handheld MEMS in indoor environments. In Proceedings of the Position, Location & Navigation Symposium-Plans, Monterey, CA, USA, 5–8 May 2014. [Google Scholar]
- Liu, J.B.; Chen, R.Z.; Pei, L.; Guinness, R.; Kuusniemi, H. A Hybrid Smartphone Indoor Positioning Solution for Mobile LBS. Sensors 2012, 12, 17208–17233. [Google Scholar] [CrossRef] [PubMed]
- Tao, X.L.; Zhu, F.; Hu, X.; Liu, W.K.; Zhang, X.H. An enhanced foot-mounted PDR method with adaptive ZUPT and multi-sensors fusion for seamless pedestrian navigation. GPS Solut. 2021, 26, 13. [Google Scholar] [CrossRef]
- Klein, I.; Solaz, Y.; Ohayon, G. Pedestrian Dead Reckoning with Smartphone Mode Recognition. IEEE Sens. J. 2018, 18, 7577–7584. [Google Scholar] [CrossRef]
- Guo, G.Y.; Chen, R.Z.; Ye, F.; Chen, L.; Pan, Y.J.; Liu, M.Y.; Cao, Z.P. A Pose Awareness Solution for Estimating Pedestrian Walking Speed. Remote Sens. 2019, 11, 55. [Google Scholar] [CrossRef]
- Zheng, L.X.; Zhan, X.Q.; Zhang, X.; Wang, S.Z.; Yuan, W.H. Heading Estimation for Multimode Pedestrian Dead Reckoning. IEEE Sens. J. 2020, 20, 8731–8739. [Google Scholar] [CrossRef]
- Yao, Y.B.; Pan, L.; Fen, W.; Xu, X.R.; Liang, X.S.; Xu, X. A Robust Step Detection and Stride Length Estimation for Pedestrian Dead Reckoning Using a Smartphone. IEEE Sens. J. 2020, 20, 9685–9697. [Google Scholar] [CrossRef]
- Zhang, Y.S.; Guo, J.X.; Wang, F.; Zhu, R.; Wang, L.P. An Indoor Localization Method Based on the Combination of Indoor Map Information and Inertial Navigation with Cascade Filter. J. Sens. 2021, 2021, 7621393. [Google Scholar] [CrossRef]
- Zhao, G.L.; Wang, X.; Zhao, H.X.; Jiang, Z.H. An improved pedestrian dead reckoning algorithm based on smartphone built-in MEMS sensors. AEU-Int. J. Electron. Commun. 2023, 168, 154674. [Google Scholar] [CrossRef]
- Wu, L.; Guo, S.L.; Han, L.; Baris, C.A. Indoor positioning method for pedestrian dead reckoning based on multi-source sensors. Measurement 2024, 229, 114416. [Google Scholar] [CrossRef]
- Liu, H.G.; Gao, Z.Z.; Wang, L.; Xu, Q.Z.; Yang, C. Reliable Positioning Model of Smartphone Sensors and User Motions Tightly Enhanced PDR. IEEE Internet Things J. 2024, 11, 30925–30938. [Google Scholar] [CrossRef]
- Chen, X.T.; Xie, Y.X.; Zhou, Z.H.; He, Y.Y.; Wang, Q.L.; Chen, Z.M. An Indoor 3D Positioning Method Using Terrain Feature Matching for PDR Error Calibration. Electronics 2024, 13, 1468. [Google Scholar] [CrossRef]
- Muralidharan, K.; Khan, A.J.; Misra, A.; Balan, R.K.; Agarwal, S. Barometric phone sensors: More hype than hope! In Proceedings of the 15th Workshop on Mobile Computing Systems and Applications, Santa Barbara, CA, USA, 26–27 February 2014; p. Article 12. [Google Scholar]
- Yu, M.; Xue, F.; Ruan, C.; Guo, H. Floor positioning method indoors with smartphone’s barometer. Geo-Spat. Inf. Sci. 2019, 22, 138–148. [Google Scholar] [CrossRef]
- Xu, Z.Y.; Wei, J.M.; Zhu, J.X.; Yang, W.J. A robust floor localization method using inertial and barometer measurements. In Proceedings of the International Conference on Indoor Positioning & Indoor Navigation, Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Elbakly, R.; Elhamshary, M.; Youssef, M. HyRise: A robust and ubiquitous multi-sensor fusion-based floor localization system. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2018, 2, 1–23. [Google Scholar] [CrossRef]
- Liu, J.H.; Wang, N.; Bai, M.C. Progress of Instantiated Reality Augmentation Method for Smart Phone Indoor Scene Elements. Comput. Eng. Appl. 2024, 60, 58–69. [Google Scholar] [CrossRef]
- Li, M.; Chen, R.Z.; Liao, X.; Guo, B.X.; Zhang, W.L.; Guo, G. A Precise Indoor Visual Positioning Approach Using a Built Image Feature Database and Single User Image from Smartphone Cameras. Remote Sens. 2020, 12, 869. [Google Scholar] [CrossRef]
- Kubícková, H.; Jedlicka, K.; Fiala, R.; Beran, D. Indoor Positioning Using PnP Problem on Mobile Phone Images. Isprs Int. J. Geo-Inf. 2020, 9, 368. [Google Scholar] [CrossRef]
- Li, S.; Yu, B.G.; Jin, Y.; Huang, L.; Zhang, H.; Liang, X.H. Image-Based Indoor Localization Using Smartphone Camera. Wirel. Commun. Mob. Comput. 2021, 2021, 3279059. [Google Scholar] [CrossRef]
- Xiao, A.R.; Chen, R.Z.; Li, D.; Chen, Y.J.; Wu, D.W. An Indoor Positioning System Based on Static Objects in Large Indoor Scenes by Using Smartphone Cameras. Sensors 2018, 18, 2229. [Google Scholar] [CrossRef]
- Jung, T.W.; Jeong, C.S.; Kwon, S.C.; Jung, K.D. Point-Graph Neural Network Based Novel Visual Positioning System for Indoor Navigation. Appl. Sci. 2021, 11, 9187. [Google Scholar] [CrossRef]
- Chen, C.; Chen, Y.W.; Zhu, J.L.; Jiang, C.H.; Jia, J.X.; Bo, Y.M.; Liu, X.Z.; Dai, H.J.; Puttonen, E.; Hyyppä, J. An Up-View Visual-Based Indoor Positioning Method via Deep Learning. Remote Sens. 2024, 16, 1024. [Google Scholar] [CrossRef]
- Tanaka, H. Ultra-High-Accuracy Visual Marker for Indoor Precise Positioning. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 2338–2343. [Google Scholar]
- Xu, J.; Dong, E.; Ma, Q.; Wu, C.; Yang, Z. Smartphone-Based Indoor Visual Navigation with Leader-Follower Mode. ACM Trans. Sen. Netw. 2021, 17, 18. [Google Scholar] [CrossRef]
- Fajrianti, E.D.; Funabiki, N.; Sukaridhoto, S.; Panduman, Y.Y.; Dezheng, K.; Shihao, F.; Surya Pradhana, A.A. INSUS: Indoor Navigation System Using Unity and Smartphone for User Ambulation Assistance. Information 2023, 14, 359. [Google Scholar] [CrossRef]
- Fajrianti, E.D.; Panduman, Y.Y.; Funabiki, N.; Haz, A.L.; Brata, K.C.; Sukaridhoto, S. A User Location Reset Method through Object Recognition in Indoor Navigation System Using Unity and a Smartphone (INSUS). Network 2024, 4, 295–312. [Google Scholar] [CrossRef]
- Liu, Z.Y.; Chen, R.Z.; Ye, F.; Guo, G.Y.; Li, Z.; Qian, L. Time-of-arrival estimation for smartphones based on built-in microphone sensor. Electron. Lett. 2020, 56, 1280–1282. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, M.L.; Wang, X.H.; Wang, Z. TOA Estimation of Chirp Signal in Dense Multipath Environment for Low-Cost Acoustic Ranging. IEEE Trans. Instrum. Meas. 2019, 68, 355–367. [Google Scholar] [CrossRef]
- Cao, S.; Chen, X.; Zhang, X.; Chen, X. Effective Audio Signal Arrival Time Detection Algorithm for Realization of Robust Acoustic Indoor Positioning. IEEE Trans. Instrum. Meas. 2020, 69, 7341–7352. [Google Scholar] [CrossRef]
- Chen, X.; Chen, Y.H.; Cao, S.; Zhang, L.; Zhang, X.; Chen, X. Acoustic Indoor Localization System Integrating TDMA + FDMA Transmission Scheme and Positioning Correction Technique. Sensors 2019, 19, 2353. [Google Scholar] [CrossRef]
- Bordoy, J.; Schott, D.J.; Xie, J.Z.; Bannoura, A.; Klein, P.; Striet, L.; Hoeflinger, F.; Haering, I.; Reindl, L.; Schindelhauer, C. Acoustic Indoor Localization Augmentation by Self-Calibration and Machine Learning. Sensors 2020, 20, 1177. [Google Scholar] [CrossRef]
- Cheng, B.; Wu, J. Acoustic TDOA Measurement and Accurate Indoor Positioning for Smartphone. Future Internet 2023, 15, 240. [Google Scholar] [CrossRef]
- Wang, Z.X.; Chen, R.Z.; Xu, S.A.; Liu, Z.Y.; Guo, G.Y.; Chen, L. A Novel Method Locating Pedestrian with Smartphone Indoors Using Acoustic Fingerprints. IEEE Sens. J. 2021, 21, 27887–27896. [Google Scholar] [CrossRef]
- Xu, S.H.; Chen, R.Z.; Guo, G.Y.; Huang, L.X.; Li, Z.; Qian, L.; Ye, F.; Chen, L. An Audio Fingerprinting Based Indoor Localization System: From Audio to Image. IEEE Sens. J. 2024, 24, 20154–20166. [Google Scholar] [CrossRef]
- Priyantha, N.B.; Chakraborty, A.; Balakrishnan, H. The cricket location-support system. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking, Boston, MA, USA, 6–11 August 2000; pp. 32–43. [Google Scholar]
- Li, Z.; Chen, R.Z.; Guo, G.Y.; Ye, F.; Qian, L.; Xu, S.H.; Huang, L.X.; Chen, L. Dual-Step Acoustic Chirp Signals Detection Using Pervasive Smartphones in Multipath and NLOS Indoor Environments. IEEE Internet Things J. 2024, 11, 6494–6507. [Google Scholar] [CrossRef]
- Yogesh, V.; Buurke, J.H.; Veltink, P.H.; Baten, C.T.M. Integrated UWB/MIMU Sensor System for Position Estimation towards an Accurate Analysis of Human Movement: A Technical Review. Sensors 2023, 23, 7277. [Google Scholar] [CrossRef]
- Kok, M.; Hol, J.D.; Schön, T.B. Indoor Positioning Using Ultrawideband and Inertial Measurements. IEEE Trans. Veh. Technol. 2015, 64, 1293–1303. [Google Scholar] [CrossRef]
- Pan, D.W.; Yu, Y.H. Indoor position system based on improved TDOA algorithm. IOP Conf. Ser. Mater. Sci. Eng. 2019, 585, 012075. [Google Scholar] [CrossRef]
- Monfared, S.; Copa, E.I.P.; De Doncker, P.; Horlin, F. AoA-Based Iterative Positioning of IoT Sensors with Anchor Selection in NLOS Environments. IEEE Trans. Veh. Technol. 2021, 70, 6211–6216. [Google Scholar] [CrossRef]
- Li, B.H.; Zhao, K.; Sandoval, E.B. A UWB-Based Indoor Positioning System Employing Neural Networks. J. Geovis. Spat. Anal. 2020, 4, 18. [Google Scholar] [CrossRef]
- Leitinger, E.; Fröhle, M.; Meissner, P.; Witrisal, K. Multipath-assisted maximum-likelihood indoor positioning using UWB signals. In Proceedings of the 2014 IEEE International Conference on Communications Workshops (ICC), Sydney, Australia, 10–14 June 2014; pp. 170–175. [Google Scholar]
- Bottigliero, S.; Milanesio, D.; Saccani, M.; Maggiora, R. A Low-Cost Indoor Real-Time Locating System Based on TDOA Estimation of UWB Pulse Sequences. IEEE Trans. Instrum. Meas. 2021, 70, 5502211. [Google Scholar] [CrossRef]
- Zhong, C.M.; Lin, R.H.; Zhu, H.L.; Lin, Y.H.; Zheng, X.; Zhu, L.H.; Gao, Y.L.; Zhuang, J.B.; Hu, H.Q.; Lu, Y.J.; et al. UWB-based AOA Indoor Position-Tracking System and Data Processing Algorithm. IEEE Sens. J. 2024, 24, 30522–30529. [Google Scholar] [CrossRef]
- Wang, Y.F.; Zhang, D.; Li, Z.K.; Lu, M.; Zheng, Y.F.; Fang, T.Y. System and Method for Reducing NLOS Errors in UWB Indoor Positioning. Appl. Sci. 2024, 14, 5123. [Google Scholar] [CrossRef]
- Chong, A.-M.-S.; Yeo, B.-C.; Lim, W.-S. Integration of UWB RSS to Wi-Fi RSS fingerprinting-based indoor positioning system. Cogent Eng. 2022, 9, 2087364. [Google Scholar] [CrossRef]
- Tsang, T.K.K.; El-Gamal, M.N. Ultra-wideband (UWB) communications systems: An overview. In Proceedings of the 3rd International IEEE-NEWCAS Conference, Quebec, QC, Canada, 22 June 2005; pp. 381–386. [Google Scholar]
- Djosic, S.; Stojanovic, I.; Jovanovic, M.; Nikolic, T.; Djordjevic, G.L. Fingerprinting-assisted UWB-based localization technique for complex indoor environments. Expert Syst. Appl. 2021, 167, 114188. [Google Scholar] [CrossRef]
- Gong, L.L.; Hu, Y.; Zhang, J.Y.; Zhao, G.F. Joint TOA and DOA Estimation for UWB Systems with Antenna Array via Doubled Frequency Sample Points and Extended Number of Clusters. Math. Probl. Eng. 2021, 2021, 7521573. [Google Scholar] [CrossRef]
- Zhou, X.; Chen, L.; Ruan, Y.L.; Chen, R.Z. Indoor positioning with multi-beam CSI of commercial 5G signals. Urban Inform. 2024, 3, 1. [Google Scholar] [CrossRef]
- Sun, M.; Wang, Y.J.; Xu, S.L.; Qi, H.X.; Hu, X.X. Indoor Positioning Tightly Coupled Wi-Fi FTM Ranging and PDR Based on the Extended Kalman Filter for Smartphones. IEEE Access 2020, 8, 49671–49684. [Google Scholar] [CrossRef]
- Liu, X.; Zhou, B.D.; Huang, P.P.; Xue, W.X.; Li, Q.Q.; Zhu, J.S.; Qiu, L. Kalman Filter-Based Data Fusion of Wi-Fi RTT and PDR for Indoor Localization. IEEE Sens. J. 2021, 21, 8479–8490. [Google Scholar] [CrossRef]
- Choi, J.; Choi, Y.S. Calibration-Free Positioning Technique Using Wi-Fi Ranging and Built-In Sensors of Mobile Devices. IEEE Internet Things J. 2021, 8, 541–554. [Google Scholar] [CrossRef]
- Zhou, P.; Wang, H.; Gravina, R.; Sun, F.M. WIO-EKF: Extended Kalman Filtering-Based Wi-Fi and Inertial Odometry Fusion Method for Indoor Localization. IEEE Internet Things J. 2024, 11, 23592–23603. [Google Scholar] [CrossRef]
- Xu, S.H.; Chen, R.Z.; Yu, Y.; Guo, G.Y.; Huang, L.X. Locating Smartphones Indoors Using Built-In Sensors and Wi-Fi Ranging with an Enhanced Particle Filter. IEEE Access 2019, 7, 95140–95153. [Google Scholar] [CrossRef]
- Chen, J.; Song, S.J.; Liu, Z.H. A PDR/WiFi Indoor Navigation Algorithm Using the Federated Particle Filter. Electronics 2022, 11, 3387. [Google Scholar] [CrossRef]
- Huang, H.; Yang, J.F.; Fang, X.; Jiang, H.; Xie, L.H. Fusion of WiFi and IMU Using Swarm Optimization for Indoor Localization. In Machine Learning for Indoor Localization and Navigation; Tiku, S., Pasricha, S., Eds.; Springer International Publishing: Cham, Switzerland, 2023; pp. 133–157. [Google Scholar]
- Lin, Y.R.; Yu, K.G. An Improved Integrated Indoor Positioning Algorithm Based on PDR and Wi-Fi under Map Constraints. IEEE Sens. J. 2024, 24, 24096–24107. [Google Scholar] [CrossRef]
- Wu, Y.; Chen, R.Z.; Fu, W.J.; Li, W.; Zhou, H.T.; Guo, G.Y. Indoor positioning based on tightly coupling of PDR and one single Wi-Fi FTM AP. Geo-Spat. Inf. Sci. 2023, 26, 480–495. [Google Scholar] [CrossRef]
- Yang, Y.K.; Huang, B.Q.; Xu, Z.D.; Yang, R.Z. A Fuzzy Logic-Based Energy-Adaptive Localization Scheme by Fusing WiFi and PDR. Wirel. Commun. Mob. Comput. 2023, 2023, 9052477. [Google Scholar] [CrossRef]
- Guo, G.Y.; Chen, R.Z.; Niu, X.G.; Yan, K.; Xu, S.H.; Chen, L. Factor Graph Framework for Smartphone Indoor Localization: Integrating Data-Driven PDR and Wi-Fi RTT/RSS Ranging. IEEE Sens. J. 2023, 23, 12346–12354. [Google Scholar] [CrossRef]
- Li, Z.H.; Shang, J.N.; Yao, Z.Y. Indoor Integrated Navigation on PDR/Wi-Fi/Barometer via Factor Graph with Local Attention. IEEE Sens. J. 2023, 23, 27613–27623. [Google Scholar] [CrossRef]
- Xu, Z.D.; Huang, B.Q.; Jia, B.; Mao, G.Q. Enhancing WiFi Fingerprinting Localization Through a Co-Teaching Approach Using Crowdsourced Sequential RSS and IMU Data. IEEE Internet Things J. 2024, 11, 3550–3562. [Google Scholar] [CrossRef]
- Sun, M.; Wang, Y.J.; Wang, Q.X.; Chen, G.L.; Li, Z.K. Smartphone-Based WiFi RTT/RSS/PDR/Map Indoor Positioning System Using Particle Filter. IEEE Trans. Instrum. Meas. 2025, 74, 1–15. [Google Scholar] [CrossRef]
- Dinh, T.M.T.; Duong, N.S.; Sandrasegaran, K. Smartphone-Based Indoor Positioning Using BLE iBeacon and Reliable Lightweight Fingerprint Map. IEEE Sens. J. 2020, 20, 10283–10294. [Google Scholar] [CrossRef]
- Chen, J.F.; Zhou, B.D.; Bao, S.Q.; Liu, X.; Gu, Z.N.; Li, L.C.; Zhao, Y.P.; Zhu, J.S.; Li, Q.Q. A Data-Driven Inertial Navigation/Bluetooth Fusion Algorithm for Indoor Localization. IEEE Sens. J. 2022, 22, 5288–5301. [Google Scholar] [CrossRef]
- Ye, H.Y.; Yang, B.; Long, Z.Q.; Dai, C.H. A Method of Indoor Positioning by Signal Fitting and PDDA Algorithm Using BLE AOA Device. IEEE Sens. J. 2022, 22, 7877–7887. [Google Scholar] [CrossRef]
- Jin, Z.; Li, Y.J.; Yang, Z.; Zhang, Y.F.; Cheng, Z. Real-Time Indoor Positioning Based on BLE Beacons and Pedestrian Dead Reckoning for Smartphones. Appl. Sci. 2023, 13, 4415. [Google Scholar] [CrossRef]
- Guo, G.Y.; Yan, K.; Liu, Z.Y.; Chen, L.; Chen, R.Z. Virtual Wireless Device-Constrained Robust Extended Kalman Filters for Smartphone Positioning in Indoor Corridor Environment. IEEE Sens. J. 2023, 23, 2815–2822. [Google Scholar] [CrossRef]
- Guo, G.Y.; Chen, R.Z.; Yan, K.; Li, P.Z.; Yuan, L.; Chen, L. Multichannel and Multi-RSS Based BLE Range Estimation for Indoor Tracking of Commercial Smartphones. IEEE Sens. J. 2023, 23, 30728–30738. [Google Scholar] [CrossRef]
- Liu, J.H.; Zeng, B.S.; Li, S.N.; Zlatanova, S.; Yang, Z.J.; Bai, M.C.; Yu, B.; Wen, D.Q. MLA-MFL: A Smartphone Indoor Localization Method for Fusing Multisource Sensors Under Multiple Scene Conditions. IEEE Sens. J. 2024, 24, 26320–26333. [Google Scholar] [CrossRef]
- Dyhdalovych, O.; Yaroshevych, A.; Kapshii, O.; Kravets, I.; Farenyuk, O. Particle filter-based BLE and IMU fusion algorithm for indoor localization. Telecommun. Syst. 2025, 88, 9. [Google Scholar] [CrossRef]
- Wang, H.C.; Luo, X.N.; Zhong, Y.R.; Lan, R.S.; Wang, Z. Acoustic Signal Positioning and Calibration with IMU in NLOS Environment. In Proceedings of the 2019 Eleventh International Conference on Advanced Computational Intelligence (ICACI), Guilin, China, 7–9 June 2019. [Google Scholar]
- Chen, R.Z.; Li, Z.; Ye, F.; Guo, G.Y.; Xu, S.A.; Qian, L.; Liu, Z.Y.; Huang, L.X. Precise Indoor Positioning Based on Acoustic Ranging in Smartphone. IEEE Trans. Instrum. Meas. 2021, 70, 9509512. [Google Scholar] [CrossRef]
- Xu, S.A.; Chen, R.Z.; Guo, G.Y.; Li, Z.; Qian, L.; Ye, F.; Liu, Z.Y.; Huang, L.X. Bluetooth, Floor-Plan, and Microelectromechanical Systems-Assisted Wide-Area Audio Indoor Localization System: Apply to Smartphones. IEEE Trans. Ind. Electron. 2022, 69, 11744–11754. [Google Scholar] [CrossRef]
- Liu, Z.Y.; Chen, R.Z.; Ye, F.; Huang, L.X.; Guo, G.Y.; Xu, S.H.; Chen, D.N.; Chen, L. Precise, Low-Cost, and Large-Scale Indoor Positioning System Based on Audio Dual-Chirp Signals. IEEE Trans. Veh. Technol. 2023, 72, 1159–1168. [Google Scholar] [CrossRef]
- Guo, G.Y.; Chen, R.Z.; Yan, K.; Li, Z.; Qian, L.; Xu, S.H.; Niu, X.G.; Chen, L. Large-Scale Indoor Localization Solution for Pervasive Smartphones Using Corrected Acoustic Signals and Data-Driven PDR. IEEE Internet Things J. 2023, 10, 15338–15349. [Google Scholar] [CrossRef]
- Yan, S.Q.; Wu, C.P.; Luo, X.A.; Ji, Y.F.; Xiao, J.M. Multi-Information Fusion Indoor Localization Using Smartphones. Appl. Sci. 2023, 13, 3270. [Google Scholar] [CrossRef]
- Wang, H.C.; Wang, Z.; Zhang, L.; Luo, X.N.; Wang, X.H. A Highly Stable Fusion Positioning System of Smartphone under NLoS Acoustic Indoor Environment. ACM Trans. Internet Technol. 2023, 23, 30. [Google Scholar] [CrossRef]
- Xu, J.; Liu, Y.Y.; Jia, Y.B.; Guo, G.Y.; Cao, S. Acoustic NLOS Signal Recognition Based on 1-D Convolutional Neural Network with Channel Attention Mechanism. IEEE Trans. Instrum. Meas. 2025, 74, 3522630. [Google Scholar] [CrossRef]
- Liu, M.Y.; Chen, R.Z.; Li, D.R.; Chen, Y.J.; Guo, G.Y.; Cao, Z.P.; Pan, Y.J. Scene Recognition for Indoor Localization Using a Multi-Sensor Fusion Approach. Sensors 2017, 17, 2847. [Google Scholar] [CrossRef]
- Neges, M.; Koch, C.; König, M.; Abramovici, M. Combining visual natural markers and IMU for improved AR based indoor navigation. Adv. Eng. Inform. 2017, 31, 18–31. [Google Scholar] [CrossRef]
- Poulose, A.; Han, D.S. Hybrid Indoor Localization Using IMU Sensors and Smartphone Camera. Sensors 2019, 19, 5084. [Google Scholar] [CrossRef] [PubMed]
- Dong, Y.T.; Yan, D.Y.; Li, T.; Xia, M.; Shi, C. Pedestrian Gait Information Aided Visual Inertial SLAM for Indoor Positioning Using Handheld Smartphones. IEEE Sens. J. 2022, 22, 19845–19857. [Google Scholar] [CrossRef]
- Shu, M.C.; Chen, G.L.; Zhang, Z.H. Efficient image-based indoor localization with MEMS aid on the mobile device. ISPRS J. Photogramm. Remote Sens. 2022, 185, 85–110. [Google Scholar] [CrossRef]
- Zheng, P.; Qin, D.Y.; Bai, J.A.; Ma, L. An Indoor Visual Positioning Method with 3D Coordinates Using Built-In Smartphone Sensors Based on Epipolar Geometry. Micromachines 2023, 14, 1097. [Google Scholar] [CrossRef]
- Bai, S.; Wen, W.; Su, D.; Hsu, L.T. Graph-Based Indoor 3D Pedestrian Location Tracking with Inertial-Only Perception. IEEE Trans. Mob. Comput. 2025, 1–15. [Google Scholar] [CrossRef]
- Karamat, T.B.; Lins, R.G.; Givigi, S.N.; Noureldin, A. Novel EKF-Based Vision/Inertial System Integration for Improved Navigation. IEEE Trans. Instrum. Meas. 2018, 67, 116–125. [Google Scholar] [CrossRef]
- Kanaris, L.; Kokkinis, A.; Liotta, A.; Stavrou, S. Fusing Bluetooth Beacon Data with Wi-Fi Radiomaps for Improved Indoor Localization. Sensors 2017, 17, 812. [Google Scholar] [CrossRef] [PubMed]
- Xiong, Z.; Sottile, F.; Spirito, M.A.; Garello, R. Hybrid Indoor Positioning Approaches Based on WSN and RFID. In Proceedings of the 2011 4th IFIP International Conference on New Technologies, Mobility and Security, Paris, France, 7–10 February 2011; pp. 1–5. [Google Scholar]
- Bai, L.; Sun, C.; Dempster, A.G.; Zhao, H.B.; Cheong, J.W.; Feng, W.Q. GNSS-5G Hybrid Positioning Based on Multi-Rate Measurements Fusion and Proactive Measurement Uncertainty Prediction. IEEE Trans. Instrum. Meas. 2022, 71, 8501415. [Google Scholar] [CrossRef]
- Li, F.X.; Tu, R.; Hong, J.; Zhang, S.X.; Zhang, P.F.; Lu, X.C. Combined positioning algorithm based on BeiDou navigation satellite system and raw 5G observations. Measurement 2022, 190, 110763. [Google Scholar] [CrossRef]
- Monica, S.; Bergenti, F. Hybrid Indoor Localization Using WiFi and UWB Technologies. Electronics 2019, 8, 334. [Google Scholar] [CrossRef]
- Luo, R.C.; Hsiao, T.J. Indoor Localization System Based on Hybrid Wi-Fi/BLE and Hierarchical Topological Fingerprinting Approach. IEEE Trans. Veh. Technol. 2019, 68, 10791–10806. [Google Scholar] [CrossRef]
- Peng, P.P.; Yu, C.; Xia, Q.H.; Zheng, Z.Q.; Zhao, K.; Chen, W. An Indoor Positioning Method Based on UWB and Visual Fusion. Sensors 2022, 22, 1394. [Google Scholar] [CrossRef]
- Tang, C.J.; Sun, W.; Zhang, X.; Zheng, J.; Sun, J.; Liu, C.P. A Sequential-Multi-Decision Scheme for WiFi Localization Using Vision-Based Refinement. IEEE Trans. Mob. Comput. 2024, 23, 2321–2336. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
| Author | Time | Survey Contents |
|---|---|---|
| Morar et al. [30] | 2020 | An overview of the field of computer vision-based indoor localization |
| Kunhoth et al. [31] | 2020 | Different computer vision-based indoor navigation and localization systems are reviewed |
| Liu et al. [32] | 2020 | Distance-based acoustic indoor localization is divided into absolute and relative distance localization |
| Guo et al. [33] | 2020 | Fusion-based indoor localization techniques and systems with three fusion features: source, algorithm, and weight space |
| Liu et al. [34] | 2020 | Existing RF-based indoor localization systems are reviewed |
| Ashraf et al. [35] | 2020 | Reviewed methods for estimating a user’s indoor location using data from smartphone sensors |
| Simões et al. [36] | 2020 | Indoor navigation and positioning system for the Blind |
| Pascacio et al. [37] | 2021 | A systematic review of cooperative indoor localization systems |
| Obeidat et al. [38] | 2021 | Indoor positioning technologies and wireless technologies are reviewed |
| Hou and Bergmann [39] | 2021 | A systematic review and quality assessment of research on PDR and wearable sensors |
| Ouyang and Abed-Meraim [40] | 2022 | Reviewed magnetic fingerprint localization techniques |
| Aparicio et al. [41] | 2022 | Summarizes the main characteristics of acoustic positioning systems in terms of accuracy, coverage area, and update rate |
| Wang et al. [42] | 2022 | A systematic review of smartphone-based inertial localization and navigation methods is presented |
| Chen and Pan [43] | 2024 | Reviewed work related to inertial localization based on deep learning |
| Naser et al. [44] | 2023 | A systematic compendium and analysis of smartphone-based indoor localization methods |
| Zhuang et al. [45] | 2023 | An overview of combined multi-sensor navigation/positioning systems is presented |
| Systems | Equipment | Positioning Methods | Accuracy | Advantages | Limitations | Costs |
|---|---|---|---|---|---|---|
| Wi-Fi | Wi-Fi sensors, Wi-Fi AP | RSSI/Fingerprinting/Wi-Fi RTT | 3–10 m | No additional infrastructure is required, Wide coverage | Cumbersome fingerprint database creation, Susceptible to signal interference and blockage, Fewer devices supporting Wi-Fi RTT protocols | Medium |
| BLE | Bluetooth sensors, Bluetooth beacons | RSSI/Fingerprinting/Proximity/AOA | 1–5 m | low power consumption, Easy deployment, Small device size | Smaller range, Susceptible to signal interference, Poorer signal stability | Low |
| Inertial navigation | Inertial sensors (accelerometer, gyroscope, magnetometer) | INS/PDR/Motion constraints | Decreases with increasing positioning time | Sensors built into smartphones, No signal interference | Problems with error accumulation | Low |
| Barometer | Barometer sensors | Barometric floor positioning | Meter scale | No additional equipment to deploy | Vulnerability to external factors | Low |
| Vision | Camera | Feature detection/Visual marker/SLAM | Decimeter scale to Meter scale | No need for base station deployment, Not affected by signal strength | Susceptible to light conditions and background interference | Low |
| Acoustic | Acoustic sensors, Signal transmitter | TOF/TOA/TDOA/DOA | Depends on the distribution density of the infrastructure | Good compatibility, High scalability, High accuracy potential | More sensitive to the Doppler effect, Small beacon coverage area, Cumbersome fingerprint database creation | High |
| UWB | UWB base station, UWB receiver | RSSI/TOA/TDOA/AOA | Centimeter scale | Low power consumption, Insensitive to multipath effects | Liquids and metallic materials can block signals, Relatively high cost of hardware devices | Medium |
| 5G | 5G base station, 5G antenna | RSSI/TOA/TDOA/AOA/CSI | Meter scale | High-ranging accuracy and reliability | Signal susceptibility to interference | Low |
| Magnetic | Magnetometer | Fingerprinting | Meter scale | No need to deploy additional equipment | Poor generalizability, Susceptible to indoor magnetic interference | Low |
| Method | Time | Author | Research Focus |
|---|---|---|---|
| RSSI | 2019 | Amri et al. [49] | A fuzzy localization algorithm calculates the distance between the anchor point and the sensor node using RSSI measurements. |
| 2023 | Tao et al. [50] | Extreme value-based access point (AP) selection and localization algorithm | |
| 2023 | Vishwakarma et al. [51] | Classification of specific locations into specific regions based on graph neural network (GNN) and collected RSSI values | |
| Fingerprinting | 2017 | Wang et al. [52] | Deep learning based fingerprinting (DeepFi), a deep learning-based indoor fingerprint localization method |
| 2018 | Xu et al. [28] | Utilize indoor environment constraints in the form of a grid-based indoor model to improve the localization of a Wi-Fi-based system. | |
| 2022 | Lan et al. [53] | Super-resolution-based fingerprint enhancement framework for fingerprint enhancement as well as super-resolution fusion | |
| 2023 | Wang et al. [54] | Three-dimensional dynamic localization model based on temporal fingerprinting | |
| 2023 | Hosseini et al. [55] | A method for generating virtual fingerprints of building interiors by predicting Wi-Fi RSS values using integration of building information modeling (BIM) and signal propagation | |
| 2024 | Kargar-Barzi et al. [48] | Lightweight indoor Wi-Fi fingerprint localization method based on convolutional neural network (CNN) and convolutional self-encoder | |
| 2024 | Pan et al. [56] | Indoor Wi-Fi localization fingerprint database construction method based on crow search algorithm optimized density-based spatial clustering of applications with noise and recurrent conditional variational autoencoder-generative adversarial network | |
| Wi-Fi RTT | 2020 | Huang et al. [57] | Learning nonlinear mapping relationship between indoor location and Wi-Fi round-trip time (RTT) ranging information using deep convolutional neural network |
| 2020 | Yu et al. [58] | A Wi-Fi RTT-based data acquisition and processing framework for reducing multipath and non-line of sight (NLOS) errors | |
| 2024 | Guo et al. [59] | Clock drift error reduction based on clock drift theory modeling localization system framework, state monitoring algorithms, and partial differential equation constraint models | |
| 2024 | Cao et al. [60] | Wi-Fi RTT localization method based on line of sight (LOS) compensation and trusted NLOS identification |
| Method | Author | Time | Research Focus |
|---|---|---|---|
| RSSI | 2021 | You et al. [65] | RSSI-based multipoint localization algorithm |
| 2023 | Gentner et al. [66] | Position is calculated on the server using particle filtering and returned to the mobile device | |
| 2023 | Assayag et al. [67] | Adaptive path loss model | |
| 2024 | Wu et al. [68] | Using KF to attenuate the effect of random perturbations | |
| Fingerprinting | 2023 | Safwat et al. [69] | K-nearest neighbor (KNN) and weighted k-nearest neighbor (WKNN) based fingerprint localization methods |
| 2023 | Shin et al. [70] | Fingerprint mapping method based on RSS sequence matching | |
| 2024 | Junoh et al. [62] | Generative adversarial network (GAN)-based semi-crowdsourced fingerprint map construction method for labor reduction | |
| AOA | 2023 | Xiao et al. [71] | Improving AOA estimation accuracy by estimating phase noise using the extended Kalman filter |
| 2024 | Wan et al. [72] | Improved signal subtraction subspace algorithm to reduce interference from coherent signals and errors caused by movement between people in the room | |
| Proximity | 2015 | Zhao et al. [63] | BLE proximity detection based on particle filtering |
| 2020 | Spachos et al. [73] | BLE proximity detection and RSSI-based localization |
| Author | Time | Research Focus |
|---|---|---|
| Klein et al. [97] | 2018 | Machine learning classification algorithm to recognize smartphone modes |
| Guo et al. [98] | 2019 | Adaptive walking speed estimation for smartphone based on attitude sensing |
| Zheng et al. [99] | 2020 | Heading estimation algorithm for pocket and swing modes |
| Yao et al. [100] | 2020 | Step detection and step length estimation algorithms for recognizing different walking modes |
| Zhang et al. [101] | 2021 | A low-cost indoor navigation framework combining inertial sensors and indoor map information |
| Zhao et al. [102] | 2023 | Denoising MEMS data using bias drift model and KF |
| Wu et al. [103] | 2024 | PDR algorithm for multi-sensor fusion based on particle filter (PF)-UKF |
| Liu et al. [104] | 2024 | Extended Kalman filter (EKF)-based integration method for pedestrian motion constraints, smartphone sensors, and step detection methods |
| Chen et al. [105] | 2024 | 3D localization method based on terrain feature matching |
| Method | Time | Author | Research Focus |
|---|---|---|---|
| Image Match | 2020 | Li et al. [111] | Accurate single-image-based indoor visual localization method |
| 2020 | Kubícková et al. [112] | Scale-invariant feature transform (SIFT) algorithm for feature detection and matching to find coordinates of image database using perspective-n-point (PnP) method | |
| 2021 | Li et al. [113] | Deep belief network-based scene classification and PnP algorithm to solve camera position | |
| Object Detection | 2018 | Xiao et al. [114] | Deep learning-based localization method for large indoor scenes |
| 2021 | Jung et al. [115] | Deep learning-based matching of object position and pose | |
| 2024 | Chen et al. [116] | Landmark matching method to match the landmark within an up-view image with a landmark in the pre-labeled landmark sequence | |
| Visual Marker | 2020 | Tanaka et al. [117] | An ultra-high precision visual marker with pose error less than 0.1° |
| SLAM | 2021 | Xu et al. [118] | A visual simultaneous localization and mapping (SLAM)-based infrastructure-free indoor navigation system |
| 2023 | Fajrianti et al. [119] | Unity for 3D environment modeling, visual SLAM with a smartphone’s gyroscope and camera for real-time tracking | |
| 2024 | Fajrianti et al. [120] | By using object detection technologies to identify information from naturally installed signs on-site |
| Method | Time | Author | Research Focus |
|---|---|---|---|
| TOA | 2019 | Zhang et al. [122] | TOA estimation method for extracting first path signal based on the iterative cleaning process |
| 2020 | Liu et al. [121] | TOA estimation method for smartphone based on built-in microphone sensor | |
| 2020 | Cao et al. [123] | A novel TOA detection algorithm for acoustic signals consisting of coarse search and fine search | |
| TDOA | 2019 | Chen et al. [124] | Doppler shift-based TDOA correction method |
| 2020 | Bordoy et al. [125] | TDOA measurement method without manual measurement of receiver position | |
| 2023 | Cheng et al. [126] | Maximum likelihood algorithms combined with TDOA measures | |
| Fingerprinting | 2021 | Wang et al. [127] | Detection of the first path based on time-division multiplexing, utilizing power spectral density (PSD) of the frequency domain signal as a fingerprinting feature |
| 2024 | Xu et al. [128] | Constructing an audio-chirp-attention network model fusing edge detection maps with normalized energy density maps and correlating fingerprint datasets with corresponding spatial locations |
| Method | Time | Author | Research Focus |
|---|---|---|---|
| TDOA | 2019 | Pan et al. [133] | Improved TDOA and KF to compute the position of target nodes |
| 2021 | Bottigliero et al. [137] | No need for time synchronization between sensors, using a unidirectional communication method to reduce the cost and complexity of tags | |
| AOA | 2021 | Monfared et al. [134] | Iterative AOA localization algorithm for multilevel anchor selection under NLOS conditions |
| 2024 | Zhong et al. [138] | AOA-based position tracking system and data processing algorithms to minimize system static error | |
| DOA | 2021 | Gong et al. [139] | Frequency doubling and cluster counting algorithm for joint estimation of TOA and DOA |
| TOF | 2020 | Li et al. [135] | A neural network approach has been adopted to enhance the system’s performance in NLOS scenarios. |
| RSS | 2022 | Chong et al. [140] | Integration of UWB RSS into Wi-Fi RSS fingerprinting-based indoor localization system |
| System | References | Cost | Strengths/Weaknesses |
|---|---|---|---|
| Wi-Fi/PDR | [145,146,147,148,149,150,151,152,153,154,155,156,157,158] | Medium | Wi-Fi positioning results provide accurate initial positioning, fusing PDR for position update and reducing the cumulative error of PDR. However, fewer devices support the Wi-Fi RTT protocol and are susceptible to signal interference and blockage. |
| BLE/PDR | [159,160,161,162,163,164,165,166] | Low | Bluetooth positioning results provide accurate initial positioning and fusion of PDR for position updating to reduce the cumulative error of PDR. The lower cost and power consumption of BLE and PDR are suitable as a pervasive indoor positioning method, but the fusion method has less coverage and is susceptible to signal interference. |
| Acoustic/PDR | [167,168,169,170,171,172,173,174] | High | Acoustic signals can provide the relative positional relationship between the sound source and the device, which is used to reduce the accumulated error of the PDR method. However, acoustic signals are susceptible to the Doppler effect and are easily blocked and absorbed by obstacles in complex indoor scenes, and high accuracy can be achieved by deploying sufficient devices in large, more open scenes. |
| Vision/PDR | [175,176,177,178,179,180,181] | Low | Visual localization using the image information acquired by the camera, combined with the attitude and motion information provided by the PDR, can reduce the cumulative error of the PDR. Visual localization is not subject to signal interference, but is susceptible to lighting conditions and background interference, and requires high smartphone performance. |
| Author | Time | Research Focus |
|---|---|---|
| Xu et al. [149] | 2019 | Enhanced PF with two different state update strategies and fast reinitialization |
| Sun et al. [145] | 2020 | Least-squares (LS)-based real-time ranging error compensation model and weighted least-squares (WLS)-based adaptive Wi-Fi FTM localization algorithm |
| Liu et al. [146] | 2021 | Adaptive filtering system consisting of multiple EKFs and outlier detection methodology |
| Choi et al. [147] | 2021 | Calibration-free localization using Wi-Fi ranging and PDR |
| Guo et al. [14] | 2022 | A tightly coupled method based on Wi-Fi RTT, RSSI, and MEMS-IMU |
| Chen et al. [150] | 2022 | Federated particle filter (FPF) fusion of PDR and Wi-Fi based on information sharing principle |
| Huang et al. [151] | 2023 | Improved particle swarm optimization-based algorithm for integrating inertial sensors and RSS fingerprinting |
| Wu et al. [153] | 2023 | Using only one Wi-Fi FTM AP and estimating position with the smartphone’s built-in inertial sensor |
| Yang et al. [154] | 2023 | Fuzzy logic-based fusion localization method adaptively schedules energy-consuming Wi-Fi scans |
| Guo et al. [155] | 2023 | Tightly coupled fusion platform for Wi-Fi RTT, RSS, and data-driven PDR based on factor graph optimization |
| Li et al. [156] | 2023 | The factor graph (FG) model with local attention can constrain factor nodes within the graph to quickly correct local outliers |
| Lin et al. [152] | 2024 | Enabling PF integration of PDR, Wi-Fi, and indoor maps |
| Zhou et al. [148] | 2024 | EKF-based multimodal sensor fusion algorithm for indoor localization |
| Xu et al. [157] | 2024 | Enhancing Wi-Fi fingerprint localization with a co-teaching approach using crowdsourced sequential RSS and IMU data |
| Sun et al. [158] | 2025 | Utilizing an improved map-aided PF to fuse WiFi RTT, RSS, PDR, and map information |
| Author | Time | Research Focus |
|---|---|---|
| Dinh et al. [159] | 2020 | Estimating approximate distance methods to estimate initial position and lightweight fingerprinting methods |
| Chen et al. [160] | 2022 | Data-driven integration of BLE-based inertial navigation using PF |
| Ye et al. [161] | 2022 | Angle estimation algorithm based on signal fitting and propagator direct data acquisition |
| Jin et al. [162] | 2023 | PF-based indoor localization framework for BLE and PDR |
| Guo et al. [163] | 2023 | Hybrid indoor localization approach with pedestrian reachability and floor map constraints based on virtual wireless devices |
| Guo et al. [164] | 2023 | Robust adaptive EKF-based multi-level constraint fusion localization framework |
| Liu et al. [165] | 2024 | A smartphone indoor localization method that fuses map positioning anchors with multi-sensor fusion |
| Dyhdalovych et al. [166] | 2025 | Utilizing a multi-carrier phase difference method for precise distance estimation based on BLE |
| Author | Time | Research Focus |
|---|---|---|
| Wang et al. [167] | 2019 | Positioning system combining acoustic signals and IMUs to correct NLOS errors |
| Chen et al. [168] | 2021 | Introduction of EKF to integrate IMU and acoustic TDOA ranging data |
| Xu et al. [169] | 2022 | Hybrid acoustic signal transmission architecture based on frequency division multiple access, time division multiple access, and space division multiple access |
| Liu et al. [170] | 2023 | Low-cost, large-scale indoor positioning system based on audio dual chirp signals |
| Guo et al. [171] | 2023 | Acoustic measurement compensation method and measurement quality assessment and control strategy |
| Yan et al. [172] | 2023 | Fusion of CHAN and improved PDR indoor localization system |
| Wang et al. [173] | 2023 | Fusion of acoustic signals and IMU data using KF |
| Xu et al. [174] | 2025 | Acoustic NLOS signal recognition based on 1-D CNN with channel attention mechanism |
| Author | Time | Research Focus |
|---|---|---|
| Liu et al. [175] | 2017 | A multi-sensor fusion approach for camera, Wi-Fi, and inertial sensors on smartphones |
| Neges et al. [176] | 2017 | Indoor navigation system based on IMU and real-time visual video streaming AR technology |
| Poulose et al. [177] | 2019 | Indoor positioning method using smartphone IMU, Wi-Fi RSSI, and camera |
| Dong et al. [178] | 2022 | Visual inertial mileage assisted by pedestrian step information |
| Shu et al. [179] | 2022 | Efficient image-based indoor positioning using MEMS |
| Zheng et al. [180] | 2023 | An indoor visual positioning method with 3D coordinates using built-in smartphone sensors based on epipolar geometry |
| Bai et al. [181] | 2025 | Mobile devices use their onboard inertial sensors alone for pedestrian state estimation in SLAM mode |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Yang, Z.; Zlatanova, S.; Li, S.; Yu, B. Indoor Localization Methods for Smartphones with Multi-Source Sensors Fusion: Tasks, Challenges, Strategies, and Perspectives. Sensors 2025, 25, 1806. https://doi.org/10.3390/s25061806
Liu J, Yang Z, Zlatanova S, Li S, Yu B. Indoor Localization Methods for Smartphones with Multi-Source Sensors Fusion: Tasks, Challenges, Strategies, and Perspectives. Sensors. 2025; 25(6):1806. https://doi.org/10.3390/s25061806
Chicago/Turabian StyleLiu, Jianhua, Zhijie Yang, Sisi Zlatanova, Songnian Li, and Bing Yu. 2025. "Indoor Localization Methods for Smartphones with Multi-Source Sensors Fusion: Tasks, Challenges, Strategies, and Perspectives" Sensors 25, no. 6: 1806. https://doi.org/10.3390/s25061806
APA StyleLiu, J., Yang, Z., Zlatanova, S., Li, S., & Yu, B. (2025). Indoor Localization Methods for Smartphones with Multi-Source Sensors Fusion: Tasks, Challenges, Strategies, and Perspectives. Sensors, 25(6), 1806. https://doi.org/10.3390/s25061806