
Multi-Node Small Radar Network Deployment Optimization in 3D Terrain


Abstract
1. Introduction
- In this paper, PEM is innovatively used to optimize the RND. By utilizing known terrain data, we can obtain propagation losses of the 3D region of interest (ROI) and, further, joint detection probabilities of the 3D ROI.
- To consider the effective coverage of different altitude layers, we introduce a new Layered Effective Coverage Rate (LECR) as a part of the optimization objective. As this is a multi-objective optimization problem (MOP), we propose NSGA-III to maximize the coverage of each altitude layer.
- Additionally, our experimental results, based on the high-resolution DEM data of a Chinese city and open GIS data from http://www.webgis.com/terr_us75m.html (accessed on 29 May 2002), demonstrate the necessity of incorporating PEM and the generalization ability of the proposed method for terrain data.
2. Problem Formulation
3. Propagation Loss
3.1. Split-Step Fourier Transform
3.2. Three-Dimensional Propagation Loss
| Algorithm 1 Summary of solving detection probabilities |
| Input: A DEM/GIS data and radar parameters, such as wavelength, pattern, and beamwidth. Output: The set of detection probabilities to each radar. for do for do while do Calculate the 2D propagation loss using Equation (6) end while end for Converting to through coordinate transformation Calculate using Equations (2)–(4), and save it as data file. end for |
3.3. Complexity Analysis
4. The Proposed Method
4.1. Layered Effective Coverage Rate
4.2. LEC-NSGA3
| Algorithm 2 LEC-NSGA3 |
| Input: DEM data and parameters of NSGA-III, such as population size G and number of iterations K. Output: The optimal sites
Crossover and mutation; Calculate joint detection probabilities for all individual by (1) and Algorithm 1; Sort the population using LECR; Selection to obtain a new population; end for
|
5. Experiments and Discussion
5.1. Experiment Setup
5.2. Comparison of Propagation Models
5.3. Results of Proposed Method
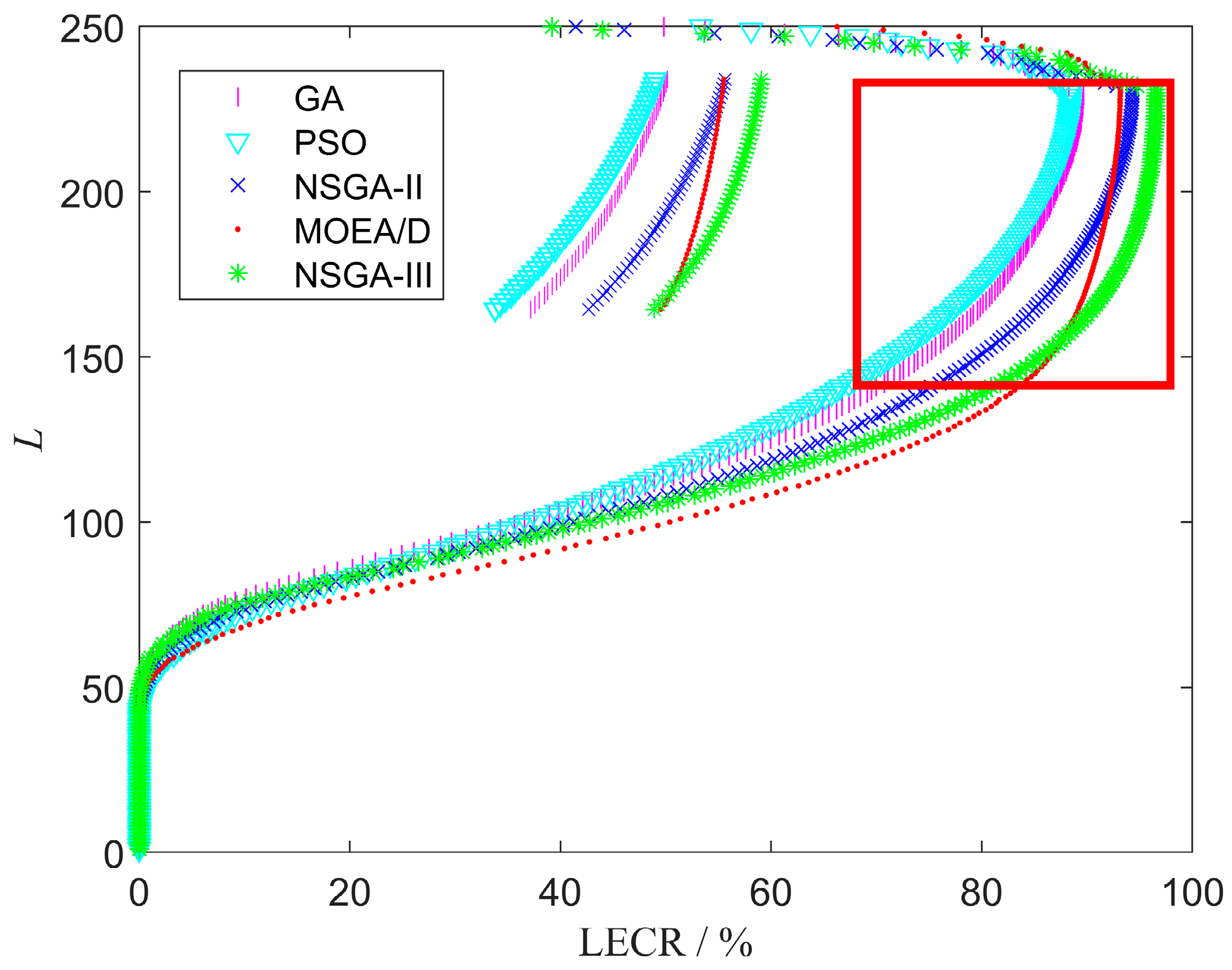
5.4. Comparison of Different EAs
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 3D | three-dimensional |
| PEM | parabolic equation model |
| LECR | Layered Effective Coverage Rate |
| NSGA-III | nondominated sorting genetic algorithm III |
| LSS | low-altitude slow-moving small |
| HBA | headspace blind area |
| RND | radar network deployment |
| EA | evolutionary algorithm |
| GA | genetic algorithm |
| PSO | particle swarm optimization |
| MOEA/D | multi-objective evolutionary algorithm based on decomposition |
| NSGA-II | nondominated sorting genetic algorithm II |
| FS | free space |
| LoS | line of sight |
| PL | path loss |
| ROI | region of interest |
| MOP | multi-objective optimization problem |
| SSFT | Split-step Fourier transform |
| SNR | signal-to-noise ratio |
| CUT | Cell Under Test |
| CFAR | Constant False-Alarm Rate |
| LEC | layered effective coverage |
References
- Chen, T.; Qi, J.; Xu, M.; Zhang, L.; Guo, Y.; Wang, S. Deployment of Remote Sensing Technologies for Effective Traffic Monitoring. Remote Sens. 2023, 15, 4674. [Google Scholar] [CrossRef]
- Sadeghi, M.; Behnia, F.; Amiri, R. Optimal Geometry Analysis for TDOA-Based Localization Under Communication Constraints. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 3096–3106. [Google Scholar]
- Wang, Z.; Zhang, T.; Kong, L.; Cui, G. Prediction-based PSO algorithm for MIMO radar antenna deployment in dynamic environment. J. Eng. 2019, 2019, 6646–6650. [Google Scholar]
- Zhang, T.; Liang, J.; Yang, Y.; Cui, G.; Kong, L.; Yang, X. Antenna Deployment Method for MIMO Radar under the Situation of Multiple Interference Regions. Signal Process. 2017, 143, 292–297. [Google Scholar]
- Han, Y.; Li, X.; Zhang, T.; Yang, X. Multi-Static Radar System Deployment Within a Non-Connected Region Utilising Particle Swarm Optimization. Remote Sens. 2024, 16, 4004. [Google Scholar] [CrossRef]
- Han, Y.; Li, X.; Xu, X.; Zhang, Z.; Zhang, T.; Yang, X. An Optimization Method for Multi-Functional Radar Network Deployment in Complex Regions. Remote Sens. 2025, 17, 730. [Google Scholar] [CrossRef]
- Hu, N.; Li, Y.; Pan, W.; Shao, S.; Tang, Y.; Li, X. Geometric Distribution of UAV Detection Performance by Bistatic Radar. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 2445–2452. [Google Scholar]
- Zhang, Z.; Li, X.; Zhang, Z.; Wang, M.; Chen, H.; Cui, G. Optimal Placement Method of Netted MIMO Radar Nodes Based on Hybrid Integration for Surveillance Applications. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 3537–3552. [Google Scholar]
- Yang, Y.; Zhang, T.; Yi, W.; Kong, L.; Li, X.; Wang, B.; Yang, X. Deployment of multistatic radar system using multi-objective particle swarm optimisation. IET Radar Sonar Navig. 2018, 12, 485–493. [Google Scholar]
- Yang, Y.; Yi, W.; Zhang, T.; Cui, G.; Kong, L.; Yang, X.; Yang, J. Fast Optimal Antenna Placement for Distributed MIMO Radar with Surveillance Performance. IEEE Signal Process. Lett. 2015, 22, 1955–1959. [Google Scholar]
- Cao, B.; Zhao, J.; Lv, Z.; Liu, X.; Kang, X.; Yang, S. Deployment optimization for 3D industrial wireless sensor networks based on particle swarm optimizers with distributed parallelism. J. Netw. Comput. Appl. 2018, 103, 225–238. [Google Scholar] [CrossRef]
- Kong, Y.; Zhao, X.; Jia, G.; Hong, J.; Zhang, F. Sensor Deployment Optimization Methods in Electromagnetic Field Based on EEIF-PLI. IEEE Sens. J. 2023, 23, 4216–4227. [Google Scholar] [CrossRef]
- Tsang, Y.P.; Choy, K.L.; Wu, C.H.; Ho, G.T.S. Multi-Objective Mapping Method for 3D Environmental Sensor Network Deployment. IEEE Commun. Lett. 2019, 23, 1231–1235. [Google Scholar] [CrossRef]
- Cao, B.; Kang, X.; Zhao, J.; Yang, P.; Lv, Z.; Liu, X. Differential Evolution-based 3D Directional Wireless Sensor Network Deployment Optimization. IEEE Internet Things J. 2018, 5, 3594–3605. [Google Scholar] [CrossRef]
- Cao, B.; Zhao, J.; Yang, P.; Yang, P.; Liu, X.; Zhang, Y. 3-D Deployment Optimization for Heterogeneous Wireless Directional Sensor Networks on Smart City. IEEE Trans. Ind. Inform. 2019, 15, 1798–1808. [Google Scholar] [CrossRef]
- Cao, B.; Zhao, J.; Yang, P.; Gu, Y.; Muhammad, K.; Rodrigues, J.J.P.C.; Albuquerque, V.H.C.d. Multiobjective 3-D Topology Optimization of Next-Generation Wireless Data Center Network. IEEE Trans. Ind. Inform. 2020, 16, 3597–3605. [Google Scholar] [CrossRef]
- Tema, E.Y.; Sahmoud, S.; Kiraz, B. Radar placement optimization based on adaptive multi-objective meta-heuristics. Expert Syst. Appl. 2024, 239, 122568. [Google Scholar] [CrossRef]
- Fu, S.; Feng, X.; Sultana, A.; Zhao, L. Joint Power Allocation and 3D Deployment for UAV-BSs: A Game Theory Based Deep Reinforcement Learning Approach. IEEE Trans. Wirel. Commun. 2024, 23, 736–748. [Google Scholar] [CrossRef]
- Wang, Z.; Ding, J.; Wang, M.; Yang, S. The Clutter Simulation of a Known Terrain by the 3D Parabolic Equation and RCS Computation. Sensors 2022, 22, 7452. [Google Scholar] [CrossRef]
- Petrović, J.; Viher, M. Radar GIS for Site Acceptance Testing. In Proceedings of the 2017 International Symposium ELMAR, Zadar, Croatia, 18–20 September 2017; pp. 225–228. [Google Scholar]
- Celaya-Echarri, M.; Azpilicueta, L.; Iturri, P.L.; Picallo, I.; Falcone, F. Radio Wave Propagation and WSN Deployment in Complex Utility Tunnel Environments. Sensors 2020, 20, 6710. [Google Scholar] [CrossRef]
- Donohue, D.J.; Kuttler, J.R. Propagation modeling over terrain using the parabolic wave equation. IEEE Trans. Antennas Propag. 2000, 48, 260–277. [Google Scholar]
- Mauger, G.S.; Bumbaco, K.A.; Hakim, G.J.; Mote, P.W. Optimal design of a climatological network: Beyond practical considerations. Geosci. Instrum. Methods Data Syst. Discuss. 2013, 3, 193–219. [Google Scholar]
- Marcum, J.I. A Statistical Theory of Target Detection by Pulsed Radar. IRE Trans. Inf. Theory 1960, IT-6, 59–267. [Google Scholar]
- Skolnik, M. Radar Handbook, 3rd ed.; McGraw-Hill: New York, NY, USA, 2008. [Google Scholar]
- Lei, Z.; Chen, X.; Tan, Y. A Coverage Model of FMCW Radar for Optimizing Sensor Network Deployment. IEEE/ASME Trans. Mechatron. 2024, 29, 2991–3000. [Google Scholar]
- Jang, D.; Kim, J.; Park, Y.B.; Choo, H. Study of an Atmospheric Refractivity Estimation Using AREPS and Genetic Algorithm. In Proceedings of the 2022 IEEE International Symposium on Radio-Frequency Integration Technology (RFIT), Busan, Republic of Korea, 29–31 August 2022; pp. 110–111. [Google Scholar]
- Benzon, H.H.; Bovith, T. Simulation and Prediction of Weather Radar Clutter Using a Wave Propagator on High Resolution NWP Data. IEEE Trans. Antennas Propag. 2008, 56, 3885–3890. [Google Scholar]
- Li, X.; Han, Y.; Wang, Z.; Zhang, T.; Kong, L. Fast antenna deployment method for multistatic radar with multiple dynamic surveillance regions. Signal Process. 2019, 170, 107419. [Google Scholar]
- Yang, L.; Liang, J.; Liu, W. Graphical deployment strategies in radar sensor networks (RSN) for target detection. EURASIP J. Wirel. Commun. Netw. 2013, 2013, 55. [Google Scholar]
- Deb, K. Multiobjective Optimization Using Evolutionary Algorithms; Wiley: Hoboken, NJ, USA, 2001. [Google Scholar]
- Coello, C.A.C.; Pulido, G.T.; Lechuga, M.S. Handling multiple objectives with particle swarm optimization. IEEE Trans. Evol. Comput. 2004, 8, 256–279. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Complexity |
|---|---|
| FS | |
| LoS | |
| PL | |
| PEM |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Wang, M.; Wu, X.; Yang, S. Multi-Node Small Radar Network Deployment Optimization in 3D Terrain. Sensors 2025, 25, 1964. https://doi.org/10.3390/s25071964
Wang Z, Wang M, Wu X, Yang S. Multi-Node Small Radar Network Deployment Optimization in 3D Terrain. Sensors. 2025; 25(7):1964. https://doi.org/10.3390/s25071964
Chicago/Turabian StyleWang, Zhiyi, Min Wang, Xinghui Wu, and Shuyuan Yang. 2025. "Multi-Node Small Radar Network Deployment Optimization in 3D Terrain" Sensors 25, no. 7: 1964. https://doi.org/10.3390/s25071964
APA StyleWang, Z., Wang, M., Wu, X., & Yang, S. (2025). Multi-Node Small Radar Network Deployment Optimization in 3D Terrain. Sensors, 25(7), 1964. https://doi.org/10.3390/s25071964