
Multipath-Assisted Ultra-Wideband Vehicle Localization in Underground Parking Environment Using Ray-Tracing




Abstract
1. Introduction
- We propose an innovative ray-tracing vehicle localization-based service (RT-VLBS) framework that leverages multipath assistance through the integration of the GS technique and RT methodology. The framework effectively converts NLOS paths into valuable positioning information, achieving robust and high-precision localization in NLOS environments.
- A novel GS filtering and weighting strategy is proposed to heuristically optimize the weights of NLOS nonlinear localization equations, substantially improving both the accuracy and reliability of the positioning algorithm.
- Extensive experiments using the UWB system in an underground parking garage, strategically designed to capture NLOS multipath propagation characteristics, comprehensively validated the effectiveness and reliability of RT-VLBS in challenging NLOS scenarios.
- To verify the RT-VLBS’s robustness and reliability, different measurement parameter errors and environmental geometric modeling errors in NLOS scenarios were simulated and analyzed.
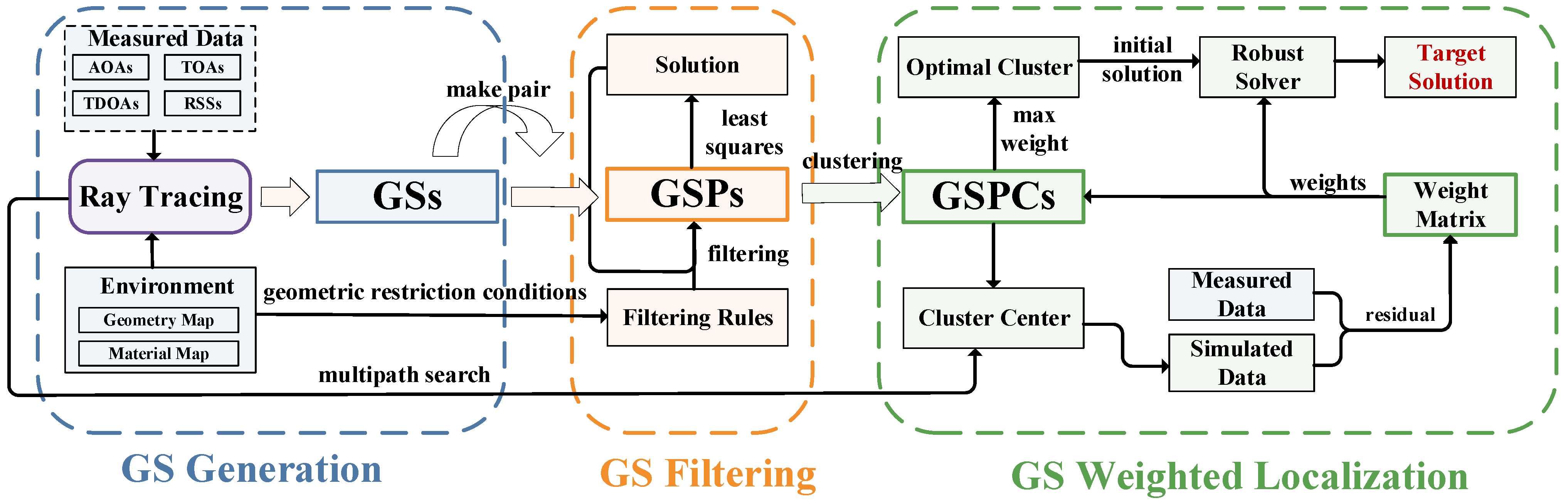
2. Basic Principles of RT-Assisted Generalized Sources
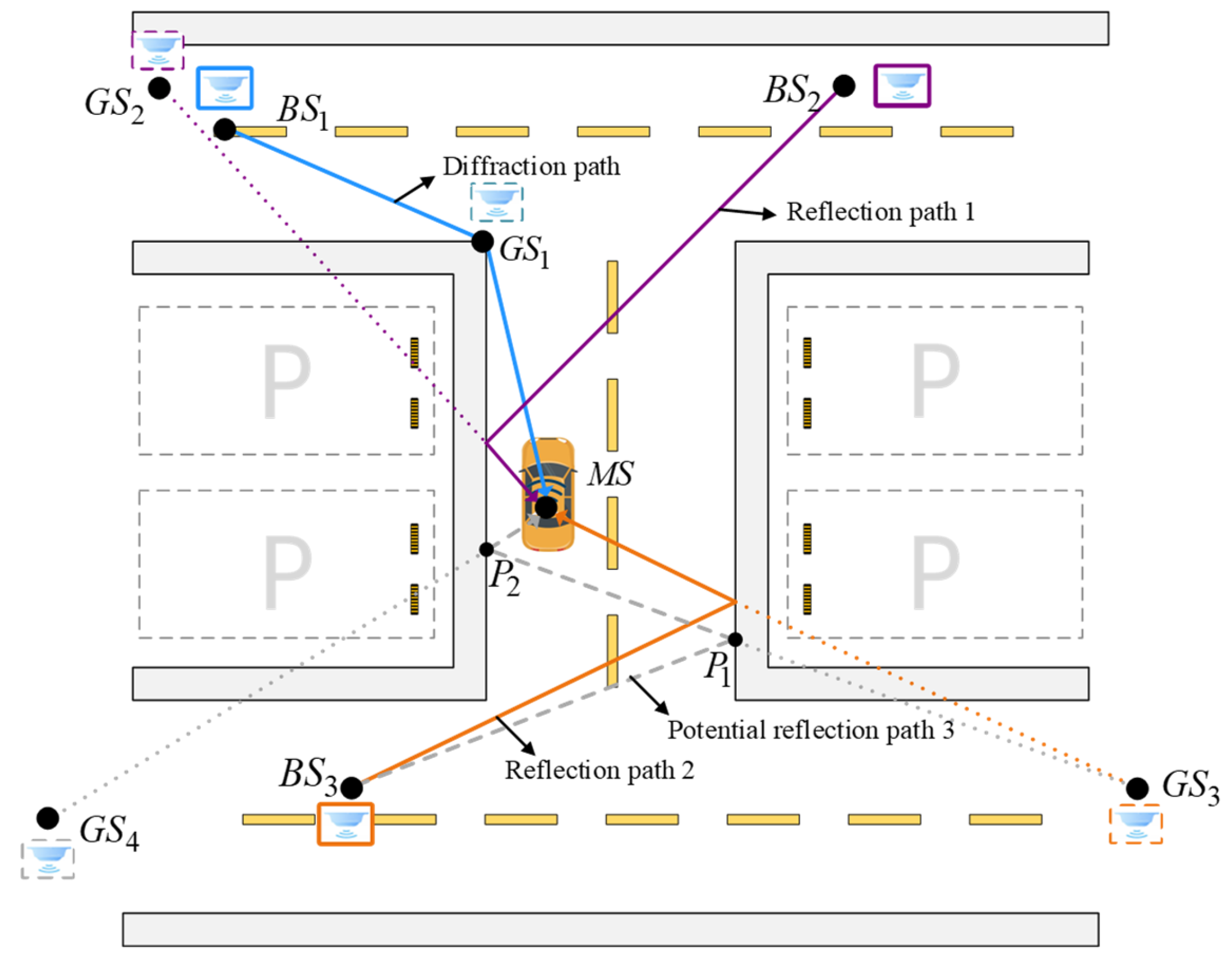
2.1. GS Generation
2.2. GS Filtering
| Algorithm 1. GS filtering algorithm |
| Precondition: Generate all GS, with the total number denoted as . |
| Sequentially construct all possible ordered GS pairs, yielding GSPs. |
| Foreach GSP in GSPs |
| Formulate base Equations (2)–(4) and compute the initial solution of the GSP through LS optimization. |
| If exists and satisfies GRCs |
| Increment the weight count of the two GSs in the current GSP by 1. |
| End If |
| End Foreach |
| Filter out GSs with zero weight count. The number of valid GSs denoted as . |
| Proceed to subsequent processing steps. |
2.3. GS Weighting
3. Vehicle Localization Algorithm
3.1. Initial Solution Selection
3.2. Robust Localization Estimator
4. Experimental Results in Underground Parking Garage
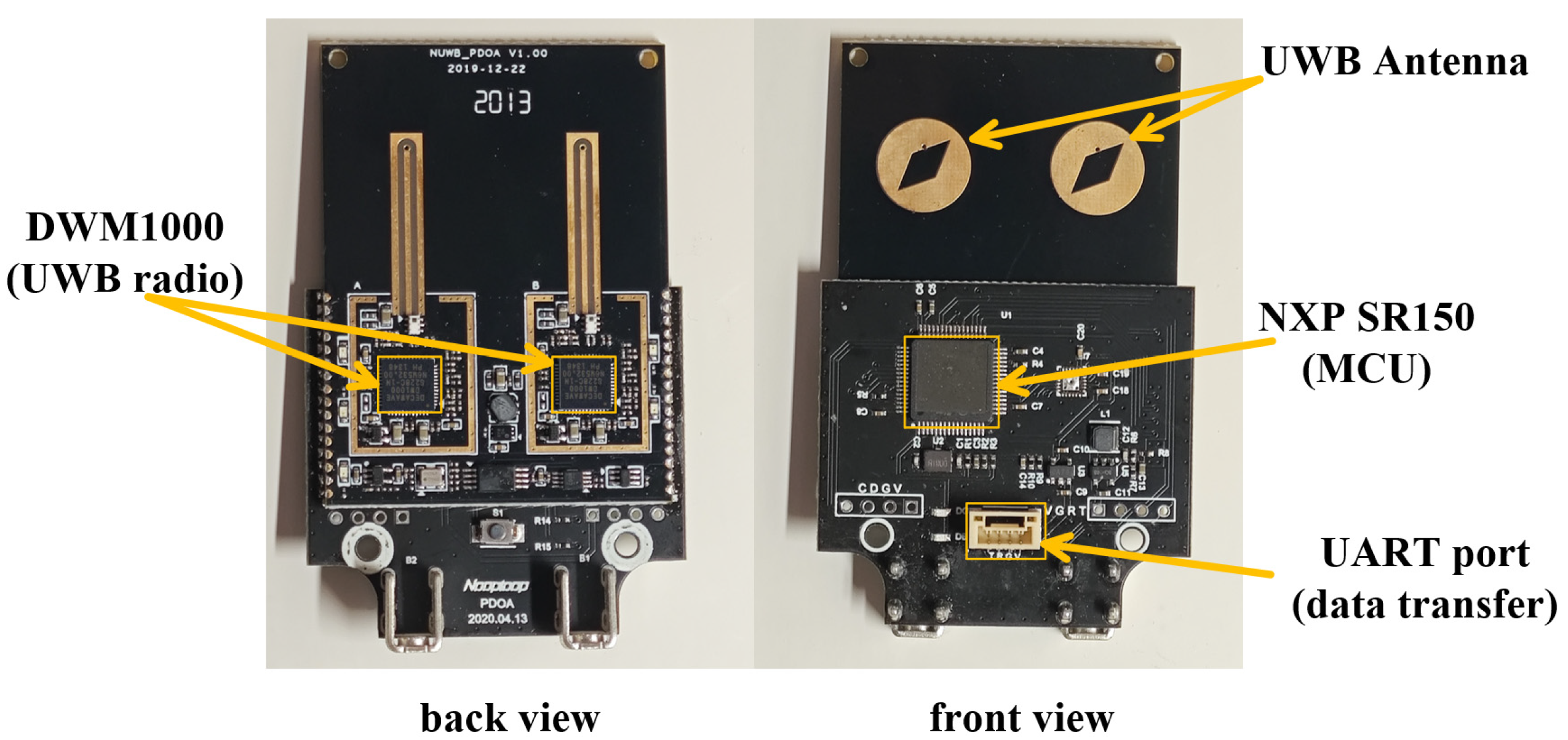
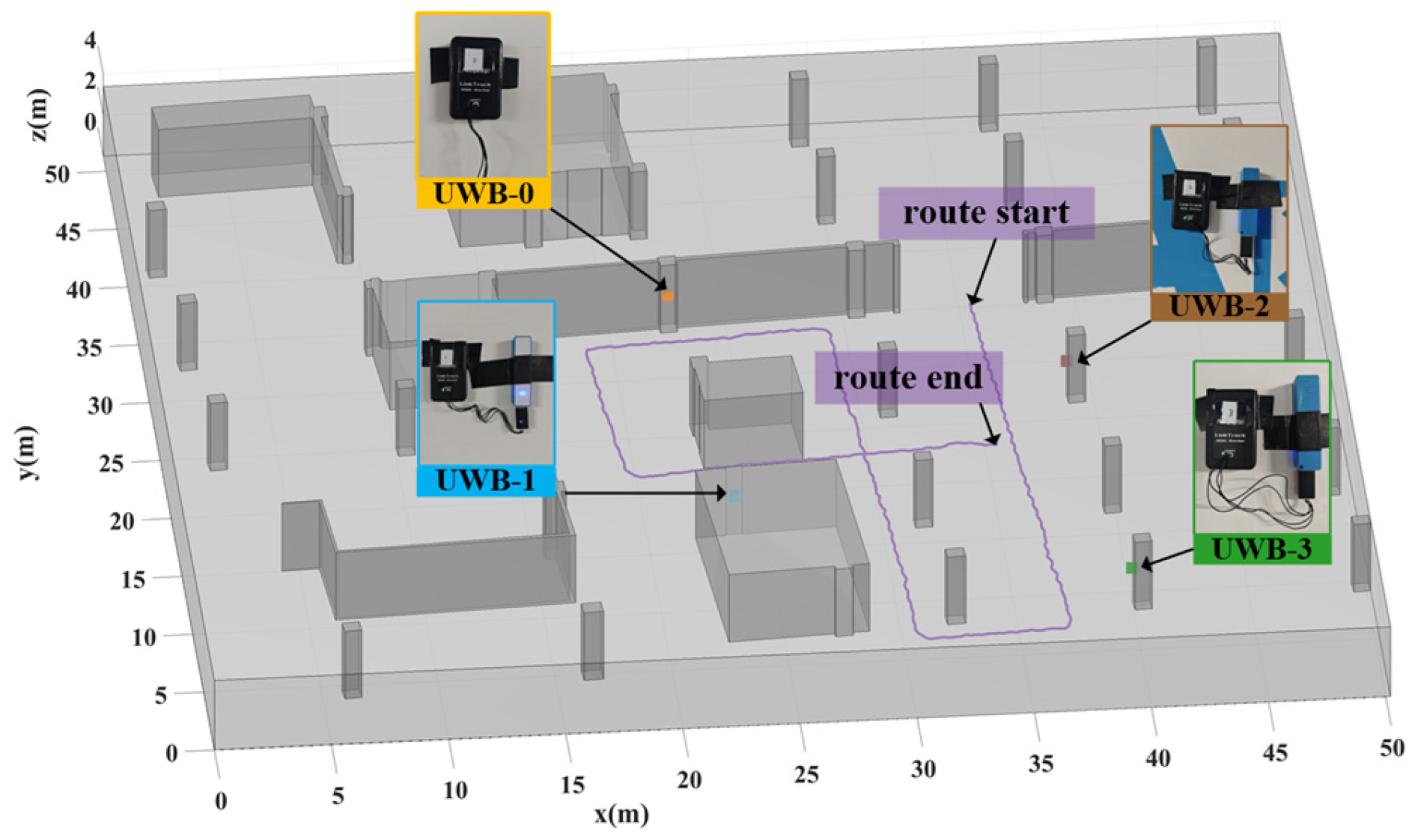
4.1. Measurement Equipment
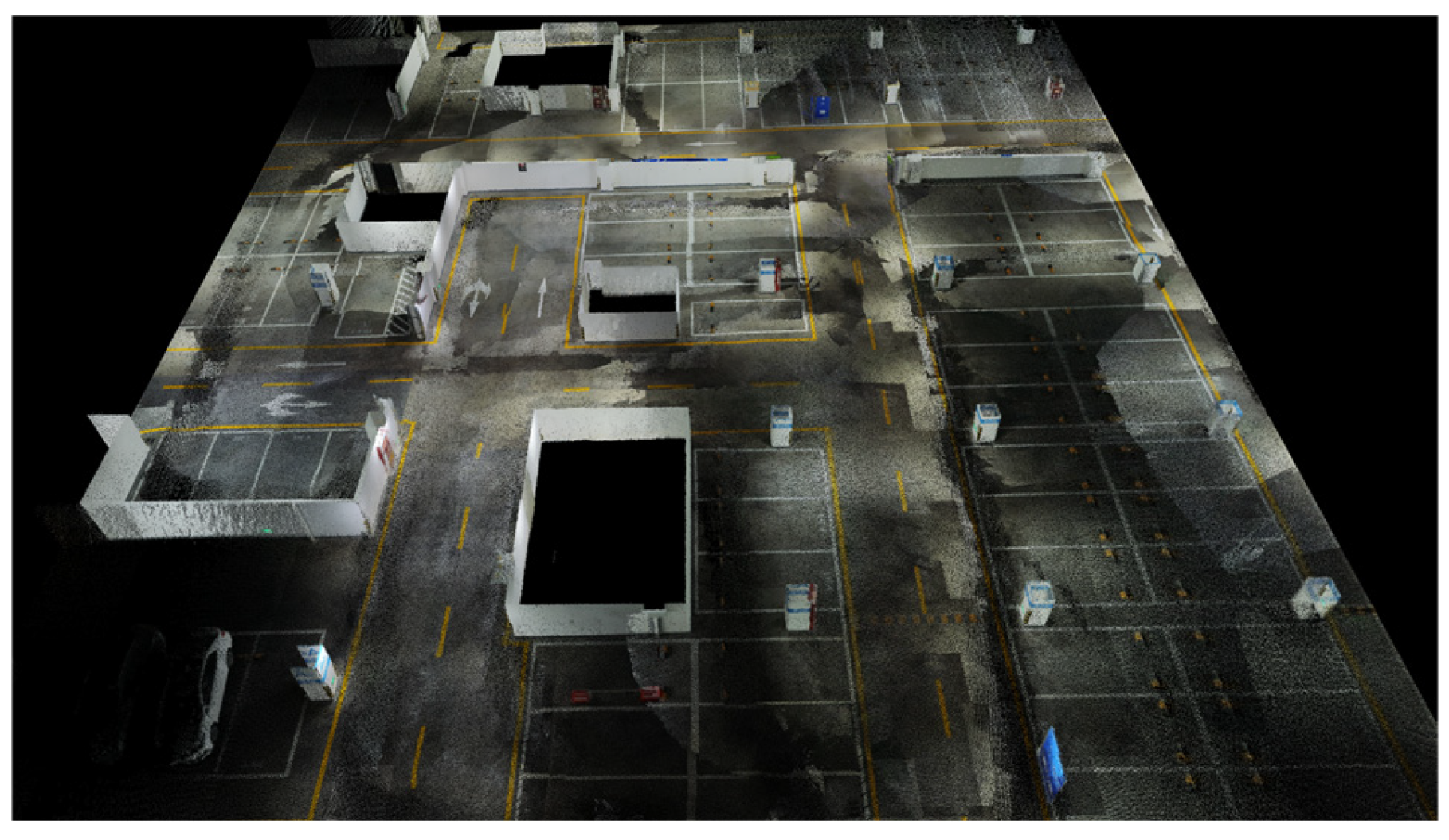
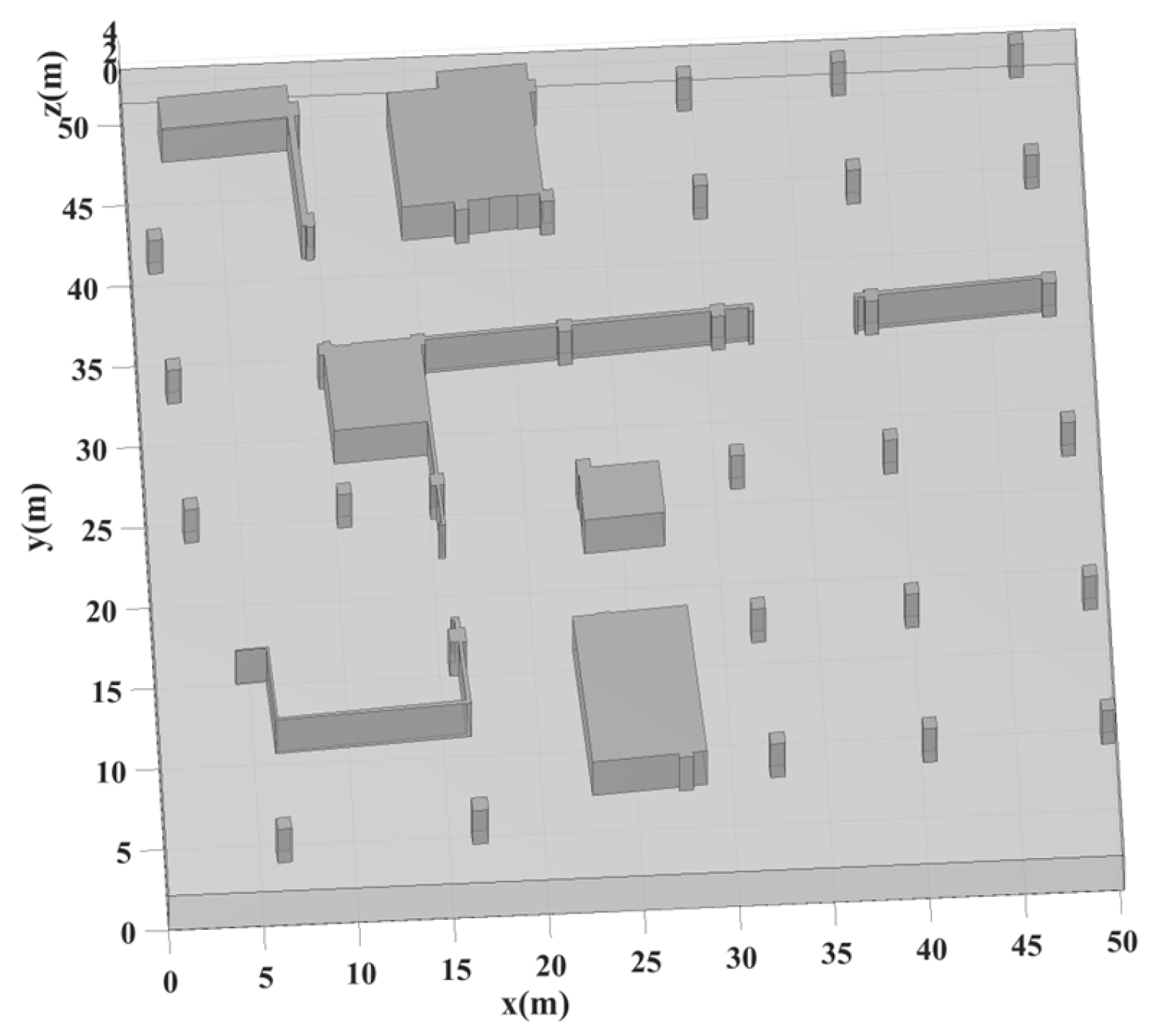
4.2. Measurement Scenario
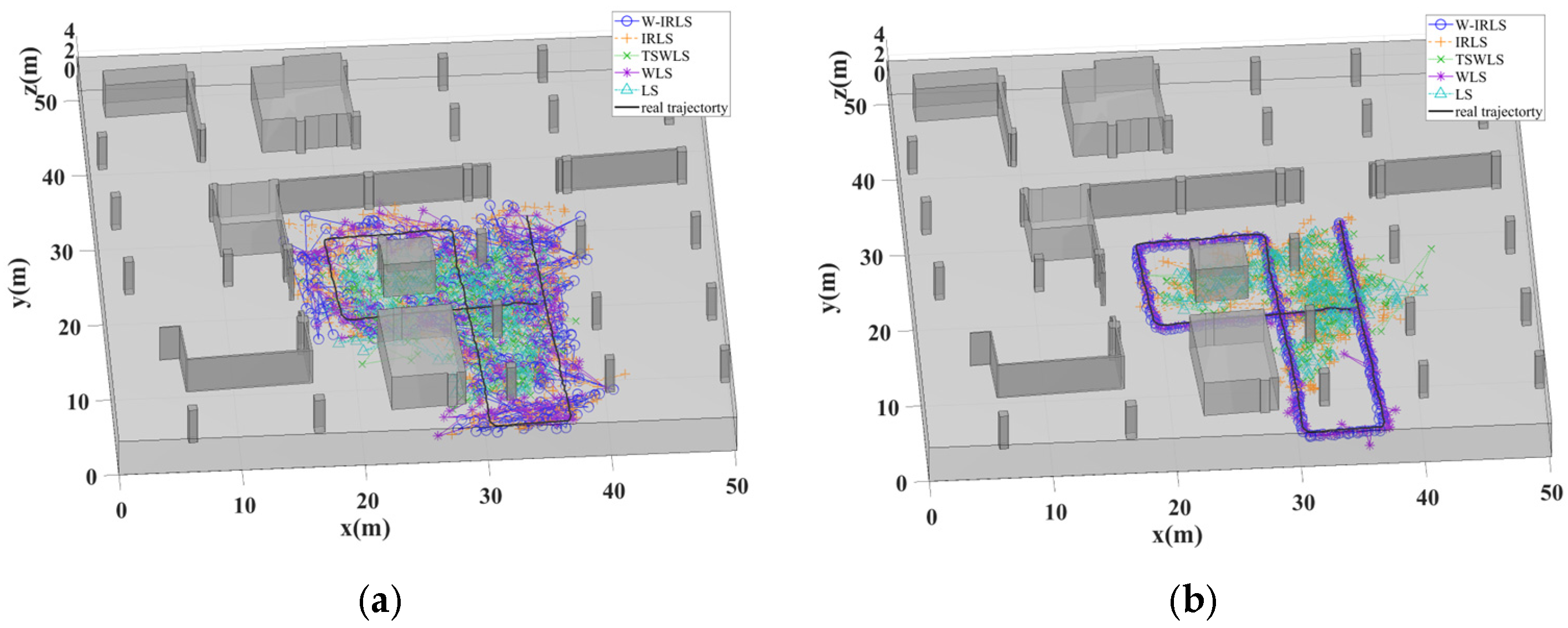
4.3. Localization Accuracy Validation
- (1)
- W-IRLS (proposed algorithm): Incorporates the initial weighted matrix and uses the optimal GSPC as the initial solution.
- (2)
- IRLS: Uses the optimal GSPC as the initial solution but assigns equal weights to all equations.
- (3)
- TSWLS: Implements the classical two-step weighted least squares approach, using only the LS method for the initial solution without initial weights.
- (4)
- WLS: Employs both the weighted matrix and the optimal GSPC as the initial solution.
- (5)
- LS: Directly solves equations using the least squares approach, without weights or initial solution.
5. Robust Analysis of RT-VLBS Framework
5.1. Simulation Environment
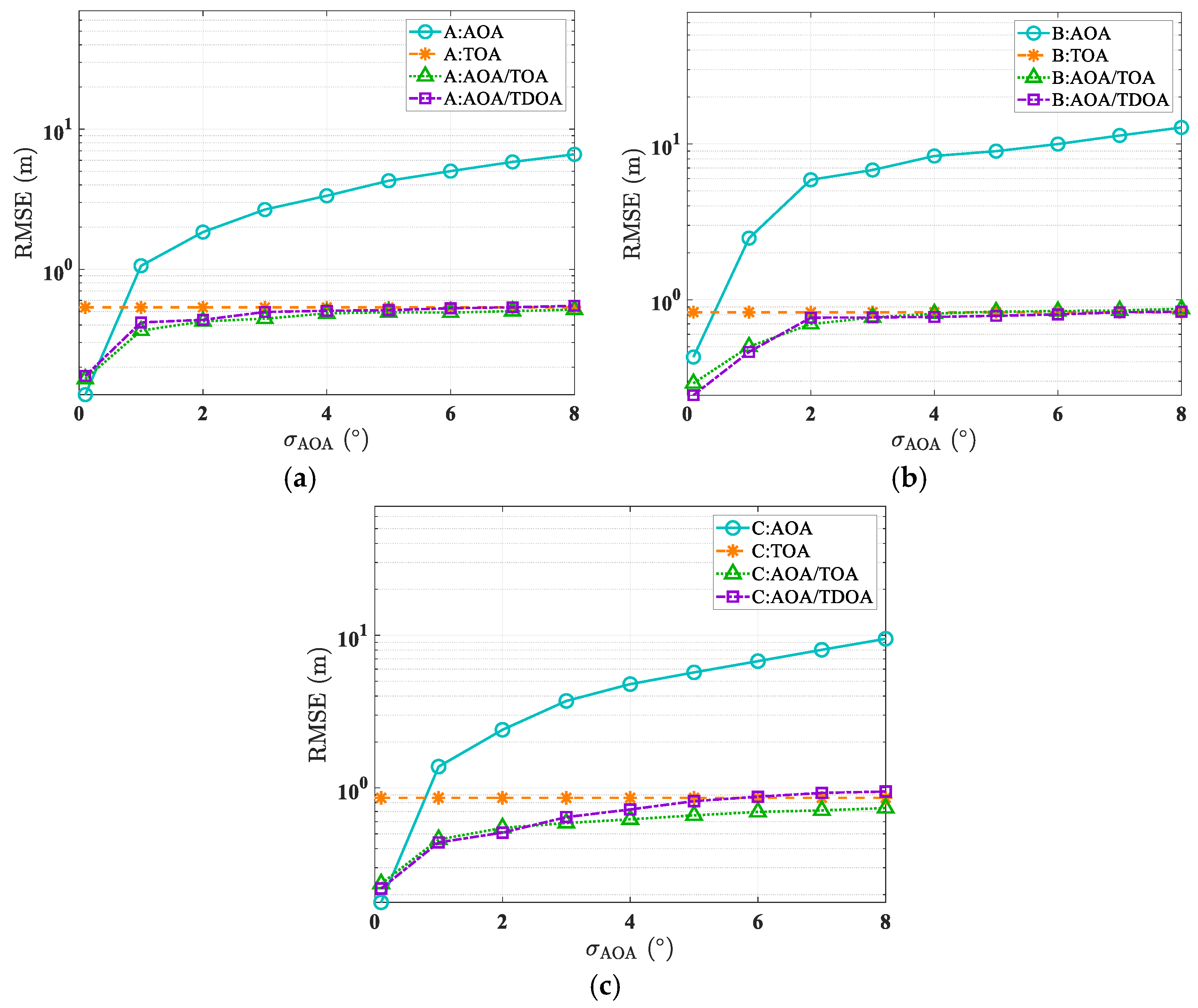
5.2. Comparison of Localization Accuracy with Different AOA Errors
5.3. Comparison of Localization Accuracy Under Different Map Errors
6. Discussion and Future Work
- (1)
- Dynamic Environments: The proposed algorithm was validated in a completely static underground parking garage. It does not account for the dynamic characteristics of parking garages, such as the presence of pedestrians and vehicles, which can introduce additional power attenuation and delay to UWB signals. Future work should evaluate the impact of dynamic factors (e.g., pedestrians and vehicles) on the positioning performance of RT-VLBS. Statistical analysis methods should be employed to establish relationships between dynamic features and UWB signal propagation characteristics, improving the adaptability of the RT-VLBS method.
- (2)
- 2.5D Limitations: The proposed RT-VLBS method operates in a 2.5D framework. However, in scenarios with sloped surfaces or spiral ramps, as commonly found in underground parking garages, more complex 3D structural features must be taken into account. Future work should focus on developing a fully 3D RT-VLBS method to enhance positioning accuracy in these challenging environments.
- (1)
- Anchor Placement Optimization: Traditional anchor placement is typically assessed based on the geometric dilution of precision (GDOP) in LOS scenarios. However, RT-VLBS leverages multipath signals for positioning. Therefore, future research should explore anchor placement strategies that consider the GDOP in the context of the RT-VLBS method, optimizing placement to improve positioning accuracy.
- (2)
- Integration with Intelligent Reflecting Surfaces: The emergence of intelligent reflecting surfaces (IRS) offers the potential to alter the propagation direction of electromagnetic waves, introducing new channel information. In the planning of future smart parking garages, integrating the RT-VLBS method with IRS could significantly enhance positioning performance.
- (3)
- Quasi-Specular reflection modeling: As 6G adopts higher-frequency signals, millimeter-wave propagation becomes increasingly sensitive to wall surface irregularities, deviating from ideal specular reflection. Thus, future research should integrate quasi-specular reflection models into localization algorithms to enhance adaptability in the millimeter-wave regime.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, H.; Yu, Y.; Cai, Y.; Chen, X.; Chen, L.; Liu, Q. A Comparative Study of State-of-the-Art Deep Learning Algorithms for Vehicle Detection. IEEE Intell. Transp. Syst. Mag. 2019, 11, 82–95. [Google Scholar] [CrossRef]
- Eskandarian, A.; Wu, C.; Sun, C. Research Advances and Challenges of Autonomous and Connected Ground Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 683–711. [Google Scholar] [CrossRef]
- Pawar, V.; Zade, N.; Vora, D.; Khairnar, V.; Oliveira, A.; Kotecha, K.; Kulkarni, A. Intelligent Transportation System With 5G Vehicle-to-Everything (V2X): Architectures, Vehicular Use Cases, Emergency Vehicles, Current Challenges, and Future Directions. IEEE Access 2024, 12, 183937–183960. [Google Scholar] [CrossRef]
- Liu, F.; Cui, Y.; Masouros, C.; Xu, J.; Han, T.X.; Eldar, Y.C.; Buzzi, S. Integrated Sensing and Communications: Toward Dual-Functional Wireless Networks for 6G and Beyond. IEEE J. Sel. Areas Commun. 2022, 40, 1728–1767. [Google Scholar] [CrossRef]
- Lu, S.; Liu, F.; Li, Y.; Zhang, K.; Huang, H.; Zou, J.; Li, X.; Dong, Y.; Dong, F.; Zhu, J.; et al. Integrated Sensing and Communications: Recent Advances and Ten Open Challenges. IEEE Internet Things J. 2024, 11, 19094–19120. [Google Scholar] [CrossRef]
- Guvenc, I.; Chong, C.-C.; Watanabe, F. NLOS Identification and Mitigation for UWB Localization Systems. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–17 March 2007; pp. 1571–1576. [Google Scholar]
- Stahlke, M.; Kram, S.; Mutschler, C.; Mahr, T. NLOS Detection Using UWB Channel Impulse Responses and Convolutional Neural Networks. In Proceedings of the 2020 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 2–4 June 2020; pp. 1–6. [Google Scholar]
- He, Z.; Petovello, M.; Pei, L.; Olesen, D.M. Evaluation of GPS/BDS Indoor Positioning Performance and Enhancement. Adv. Space Res. 2017, 59, 870–876. [Google Scholar] [CrossRef]
- Forghani, M.; Karimipour, F.; Claramunt, C. From Cellular Positioning Data to Trajectories: Steps towards a More Accurate Mobility Exploration. Transp. Res. Part C Emerg. Technol. 2020, 117, 102666. [Google Scholar] [CrossRef]
- Liu, Q.; Gao, C.; Xhafa, A.; Gao, W.; López-Salcedo, J.A.; Seco-Granados, G. Performance Analysis of GNSS + 5G Hybrid Positioning Algorithms for Smartphones in Urban Environments. IEEE Trans. Instrum. Meas. 2024, 73, 1–9. [Google Scholar] [CrossRef]
- Faheem; Mahmud, S.A.; Khan, G.M.; Rahman, M.; Zafar, H. A Survey of Intelligent Car Parking System. J. Appl. Res. Technol. 2013, 11, 714–726. [Google Scholar] [CrossRef]
- Lu, N.; Cheng, N.; Zhang, N.; Shen, X.; Mark, J.W. Connected Vehicles: Solutions and Challenges. IEEE Internet Things J. 2014, 1, 289–299. [Google Scholar] [CrossRef]
- Biyik, C.; Allam, Z.; Pieri, G.; Moroni, D.; O’Fraifer, M.; O’Connell, E.; Olariu, S.; Khalid, M. Smart Parking Systems: Reviewing the Literature, Architecture and Ways Forward. Smart Cities 2021, 4, 623–642. [Google Scholar] [CrossRef]
- Bresson, G.; Alsayed, Z.; Yu, L.; Glaser, S. Simultaneous Localization and Mapping: A Survey of Current Trends in Autonomous Driving. IEEE Trans. Intell. Veh. 2017, 2, 194–220. [Google Scholar] [CrossRef]
- Adnan Yusuf, S.; Khan, A.; Souissi, R. Vehicle-to-Everything (V2X) in the Autonomous Vehicles Domain—A Technical Review of Communication, Sensor, and AI Technologies for Road User Safety. Transp. Res. Interdiscip. Perspect. 2024, 23, 100980. [Google Scholar] [CrossRef]
- Yang, S.; Xiao, X.; Wang, X.; Chen, Z.; Sheng, M.; Yao, Z. Multipath Components Modeling and Measuring in Device-Free Underground Parking Localization. In Proceedings of the 2024 IEEE/CIC International Conference on Communications in China (ICCC), Hangzhou, China, 7–9 August 2024; pp. 417–422. [Google Scholar]
- Kwok, Z.; Sun, M. Multi-Sensor Fusion-Assisted AGV Localization System in GNSS Denied Environments. In Proceedings of the 2023 IEEE 11th International Conference on Computer Science and Network Technology (ICCSNT), Dalian, China, 21–23 October 2023; pp. 59–63. [Google Scholar]
- Li, Y.; Feng, F.; Cai, Y.; Li, Z.; Sotelo, M.A. Localization for Intelligent Vehicles in Underground Car Parks Based on Semantic Information. IEEE Trans. Intell. Transp. Syst. 2024, 25, 1317–1332. [Google Scholar] [CrossRef]
- De Angelis, G.; De Angelis, A.; Pasku, V.; Moschitta, A.; Carbone, P. A Hybrid Outdoor/Indoor Positioning System for IoT Applications. In Proceedings of the 2015 IEEE International Symposium on Systems Engineering (ISSE), Rome, Italy, 30 September 2015; pp. 1–6. [Google Scholar]
- Wang, J.; Gao, Y.; Li, Z.; Meng, X.; Hancock, C.M. A Tightly-Coupled GPS/INS/UWB Cooperative Positioning Sensors System Supported by V2I Communication. Sensors 2016, 16, 944. [Google Scholar] [CrossRef]
- Luo, R.C.; Hsiao, T.-J. Indoor Localization System Based on Hybrid Wi-Fi/BLE and Hierarchical Topological Fingerprinting Approach. IEEE Trans. Veh. Technol. 2019, 68, 10791–10806. [Google Scholar] [CrossRef]
- Luo, R.C.; Hsiao, T.J. Dynamic Wireless Indoor Localization Incorporating with an Autonomous Mobile Robot Based on an Adaptive Signal Model Fingerprinting Approach. IEEE Trans. Ind. Electron. 2019, 66, 1940–1951. [Google Scholar] [CrossRef]
- Brunacci, V.; De Angelis, A.; Costante, G. Development of a Cooperative Localization System Using a UWB Network and BLE Technology. In Proceedings of the 2022 IEEE International Symposium on Measurements & Networking (M&N), Padua, Italy, 18–20 July 2022; pp. 1–6. [Google Scholar]
- Li, C.; Chai, W.; Zhang, M.; Sun, Z.; Shao, G.; Li, Q. A Novel Visual-Aided Method to Enhance the Inertial Navigation System of an Intelligent Vehicle in Indoor Environments. IEEE Trans. Instrum. Meas. 2023, 72, 1–13. [Google Scholar] [CrossRef]
- Madahian, A.; Ardakani, P.A.; Abouei, J.; Mirvakili, A.; Mohammadi, A.; Koomson, V. A Hybrid VLC/RF Parking Automation System. IEEE Access 2023, 11, 66960–66978. [Google Scholar] [CrossRef]
- Dawson, E.; Mounier, E.; Elhabiby, M.; Noureldin, A. Merits and Limitations of Automotive Radar for Land Vehicle Positioning in Challenging Environments. IEEE Sens. J. 2023, 23, 26691–26700. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Jiménez, A.R.; Seco, F. Comparing Decawave and Bespoon UWB Location Systems: Indoor/Outdoor Performance Analysis. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Al-Okby, M.F.R.; Junginger, S.; Roddelkopf, T.; Thurow, K. UWB-Based Real-Time Indoor Positioning Systems: A Comprehensive Review. Appl. Sci. 2024, 14, 11005. [Google Scholar] [CrossRef]
- Abolfathi Momtaz, A.; Behnia, F.; Amiri, R.; Marvasti, F. NLOS Identification in Range-Based Source Localization: Statistical Approach. IEEE Sens. J. 2018, 18, 3745–3751. [Google Scholar] [CrossRef]
- Zeng, Z.; Liu, S.; Wang, L. NLOS Identification for UWB Based on Channel Impulse Response. In Proceedings of the 2018 12th International Conference on Signal Processing and Communication Systems (ICSPCS), Cairns, Australia, 17–19 December 2018; pp. 1–6. [Google Scholar]
- Zhu, Y.; Ma, T.; Li, Z.; Sun, D.; Sun, X.; Zhao, X.; Hu, F. NLOS Identification and Correction Based on Multidimensional Scaling and Quasi-Accurate Detection. IEEE Access 2019, 7, 53977–53987. [Google Scholar] [CrossRef]
- Liang, Y.; Li, H. LOS Signal Identification for Passive Multi-Target Localization in Multipath Environments. IEEE Signal Process. Lett. 2023, 30, 1597–1601. [Google Scholar] [CrossRef]
- Su, Z.; Shao, G.; Liu, H. Semidefinite Programming for NLOS Error Mitigation in TDOA Localization. IEEE Commun. Lett. 2018, 22, 1430–1433. [Google Scholar] [CrossRef]
- Yang, X.; Wang, J.; Song, D.; Feng, B.; Ye, H. A Novel NLOS Error Compensation Method Based IMU for UWB Indoor Positioning System. IEEE Sens. J. 2021, 21, 11203–11212. [Google Scholar] [CrossRef]
- Nkrow, R.E.; Silva, B.; Boshoff, D.; Hancke, G.; Gidlund, M.; Abu-Mahfouz, A. NLOS Identification and Mitigation for Time-Based Indoor Localization Systems: Survey and Future Research Directions. ACM Comput. Surv. 2024, 56, 303. [Google Scholar] [CrossRef]
- Shikur, B.Y.; Weber, T. TDOA/AOD/AOA Localization in NLOS Environments. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; pp. 6518–6522. [Google Scholar]
- Meissner, P.; Leitinger, E.; Witrisal, K. UWB for Robust Indoor Tracking: Weighting of Multipath Components for Efficient Estimation. IEEE Wirel. Commun. Lett. 2014, 3, 501–504. [Google Scholar] [CrossRef]
- Gentner, C.; Jost, T.; Wang, W.; Zhang, S.; Dammann, A.; Fiebig, U.-C. Multipath Assisted Positioning with Simultaneous Localization and Mapping. IEEE Trans. Wirel. Commun. 2016, 15, 6104–6117. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, B.; Pei, S.; Zhang, Y.; Zhang, S.; Yu, J. An Indoor Localization Method Based on AOA and PDOA Using Virtual Stations in Multipath and NLOS Environments for Passive UHF RFID. IEEE Access 2018, 6, 31772–31782. [Google Scholar] [CrossRef]
- Zhang, Y.; Ho, K.C. Localization of Transmitters and Scatterers by Single Receiver. IEEE Trans. Signal Process. 2023, 71, 2267–2282. [Google Scholar] [CrossRef]
- Wang, T.; Li, Y.; Liu, J.; Hu, K.; Shen, Y. Multipath-Assisted Single-Anchor Localization via Deep Variational Learning. IEEE Trans. Wirel. Commun. 2024, 23, 9113–9128. [Google Scholar] [CrossRef]
- Katwe, M.; Ghare, P.; Sharma, P.K.; Kothari, A. NLOS Error Mitigation in Hybrid RSS-TOA-Based Localization Through Semi-Definite Relaxation. IEEE Commun. Lett. 2020, 24, 2761–2765. [Google Scholar] [CrossRef]
- Panwar, K.; Katwe, M.; Babu, P.; Ghare, P.; Singh, K. A Majorization-Minimization Algorithm for Hybrid TOA-RSS Based Localization in NLOS Environment. IEEE Commun. Lett. 2022, 26, 1017–1021. [Google Scholar] [CrossRef]
- Kong, Q. WiFi-Aided Ultra Wideband Localization in Indoor NLoS Environment. IEEE Commun. Lett. 2024, 28, 537–541. [Google Scholar] [CrossRef]
- Zhu, Y.; Xia, W.; Yan, F.; Shen, L. NLOS Identification via AdaBoost for Wireless Network Localization. IEEE Commun. Lett. 2019, 23, 2234–2237. [Google Scholar] [CrossRef]
- Liu, Q.; Yin, Z.; Zhao, Y.; Wu, Z.; Wu, M. UWB LOS/NLOS Identification in Multiple Indoor Environments Using Deep Learning Methods. Phys. Commun. 2022, 52, 101695. [Google Scholar] [CrossRef]
- Li, J.; Liu, S.; Gao, Y.; Lv, Y.; Wei, H. UWB (N)LOS Identification Based on Deep Learning and Transfer Learning. IEEE Commun. Lett. 2024, 28, 2111–2115. [Google Scholar] [CrossRef]
- Kim, D.-H.; Farhad, A.; Pyun, J.-Y. UWB Positioning System Based on LSTM Classification with Mitigated NLOS Effects. IEEE Internet Things J. 2023, 10, 1822–1835. [Google Scholar] [CrossRef]
- Jiang, C.; Shen, J.; Chen, S.; Chen, Y.; Liu, D.; Bo, Y. UWB NLOS/LOS Classification Using Deep Learning Method. IEEE Commun. Lett. 2020, 24, 2226–2230. [Google Scholar] [CrossRef]
- Bai, M.; Huang, Y.; Zhang, Y.; Chen, F. A Novel Heavy-Tailed Mixture Distribution Based Robust Kalman Filter for Cooperative Localization. IEEE Trans. Ind. Inform. 2021, 17, 3671–3681. [Google Scholar] [CrossRef]
- Bai, M.; Huang, Y.; Zhang, Y.; Chambers, J. Statistical Similarity Measure-Based Adaptive Outlier-Robust State Estimator with Applications. IEEE Trans. Autom. Control 2022, 67, 4354–4361. [Google Scholar] [CrossRef]
- Bai, M.; Huang, Y.; Chen, B.; Zhang, Y. A Novel Robust Kalman Filtering Framework Based on Normal-Skew Mixture Distribution. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 6789–6805. [Google Scholar] [CrossRef]
- Sa, Y.; Zhu, Z.; Shen, G.; Li, X.; Tang, Y.; Chen, P.; Wang, Q.-G. NLOS Mitigation Algorithm by Distance Geometric Constrain for Mine-Used Underground Monorail Crane Localization. IEEE Trans. Instrum. Meas. 2023, 72, 1–13. [Google Scholar] [CrossRef]
- Cao, B.; Jiang, C.; Fan, S.; Zhang, H.; Liu, W. Improving the Localization Accuracy and Robustness of a UWB System Using VB-CSRUKF and RTS in Harsh Underground NLOS Environments. IEEE Internet Things J. 2024, 11, 22790–22802. [Google Scholar] [CrossRef]
- Chen, C.-H.; Feng, K.-T.; Chen, C.-L.; Tseng, P.-H. Wireless Location Estimation with the Assistance of Virtual Base Stations. IEEE Trans. Veh. Technol. 2009, 58, 93–106. [Google Scholar] [CrossRef]
- Chen, S.W.; Seow, C.K.; Tan, S.Y. Virtual Reference Device-Based NLOS Localization in Multipath Environment. IEEE Antennas Wirel. Propag. Lett. 2014, 13, 1409–1412. [Google Scholar] [CrossRef]
- Shamsian, M.R.; Sadeghi, M.; Behnia, F. Joint TDOA and DOA Single Site Localization in NLOS Environment Using Virtual Stations. IEEE Trans. Instrum. Meas. 2024, 73, 1–10. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Q.; Xu, J.; Li, Z.; Yang, Y. Time Delay Characteristics Analysis of UWB Diffraction Propagation in Indoor NLOS Environment. IEEE Commun. Lett. 2023, 27, 1889–1893. [Google Scholar] [CrossRef]
- Hu, S.; Guo, L.; Liu, Z. A Ray-Tracing-Based Single-Site Localization Method for Non-Line-of-Sight Environments. Sensors 2024, 24, 7925. [Google Scholar] [CrossRef]
- Heydariaan, M.; Dabirian, H.; Gnawali, O. AnguLoc: Concurrent Angle of Arrival Estimation for Indoor Localization with UWB Radios. In Proceedings of the 2020 16th International Conference on Distributed Computing in Sensor Systems (DCOSS), IEEE, Marina del Rey, CA, USA, 25–27 May 2020; pp. 112–119. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | W-IRLS | IRLS | TSWLS | WLS | LS |
|---|---|---|---|---|---|
| AOA | 2.17 m | 2.56 m | 5.53 m | 2.48 m | 5.62 m |
| TOA | 0.18 m | 6.30 m | 6.71 m | 0.21 m | 6.96 m |
| AOA/TOA | 0.14 m | 0.35 m | 0.29 m | 0.29 m | 0.27 m |
| AOA/TDOA | 0.30 m | 1.07 m | 7.25 m | 1.77 m | 7.23 m |
| Algorithm | W-IRLS | IRLS | TSWLS | WLS | LS |
|---|---|---|---|---|---|
| AOA | 1.48 m | 1.97 m | 2.86 m | 1.83 m | 2.81 m |
| TOA | 0.17 m | 5.85 m | 4.68 m | 0.32 m | 4.06 m |
| AOA/TOA | 0.12 m | 0.56 m | 0.41 m | 0.41 m | 0.31 m |
| AOA/TDOA | 0.31 m | 1.97 m | 6.19 m | 3.86 m | 6.26 m |
| Algorithm | AOA | TOA | AOA/TOA | AOA/TDOA |
|---|---|---|---|---|
| A | 3.23 m | 0.54 m | 0.43 m | 0.46 m |
| B | 7.44 m | 0.83 m | 0.69 m | 0.72 m |
| C | 4.72 m | 0.86 m | 0.58 m | 0.68 m |
| Algorithm | AOA | TOA | AOA/TOA | AOA/TDOA |
|---|---|---|---|---|
| A | 3.65 m | 0.33 m | 0.27 m | 0.29 m |
| B | 8.69 m | 0.48 m | 0.46 m | 0.55 m |
| C | 9.21 m | 0.58 m | 0.49 m | 0.51 m |
| Algorithm | AOA | TOA | AOA/TOA | AOA/TDOA |
|---|---|---|---|---|
| A | 0 m | 0 m | 0 m | 0 m |
| B | 1.8 m | 0.72 m | 0.52 m | 1.22 m |
| C | 2.0 m | 0.98 m | 0.83 m | 1.67 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, S.; Guo, L.; Liu, Z.; Gao, S. Multipath-Assisted Ultra-Wideband Vehicle Localization in Underground Parking Environment Using Ray-Tracing. Sensors 2025, 25, 2082. https://doi.org/10.3390/s25072082
Hu S, Guo L, Liu Z, Gao S. Multipath-Assisted Ultra-Wideband Vehicle Localization in Underground Parking Environment Using Ray-Tracing. Sensors. 2025; 25(7):2082. https://doi.org/10.3390/s25072082
Chicago/Turabian StyleHu, Shuo, Lixin Guo, Zhongyu Liu, and Shuaishuai Gao. 2025. "Multipath-Assisted Ultra-Wideband Vehicle Localization in Underground Parking Environment Using Ray-Tracing" Sensors 25, no. 7: 2082. https://doi.org/10.3390/s25072082
APA StyleHu, S., Guo, L., Liu, Z., & Gao, S. (2025). Multipath-Assisted Ultra-Wideband Vehicle Localization in Underground Parking Environment Using Ray-Tracing. Sensors, 25(7), 2082. https://doi.org/10.3390/s25072082