

Registration of Sounds Emitted by the Madagascar Hissing Cockroach Using a Distributed Acoustic Sensor
 ,
,  , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Large size. The Madagascar hissing cockroach is one of the largest cockroach species in the world, with some individuals reaching up to 10 cm in length;
- Ability to produce hissing sounds. This species uses hissing as its primary defense mechanism against insectivorous predators;
- Lack of wings. Unlike many other cockroach species, Madagascar hissing cockroaches have lost the ability to fly, as wings are unnecessary for burrowing in forest litter. Instead, they have developed a thick and durable chitinous exoskeleton;
- Suitability for experiments. Due to their large size and wingless nature, Madagascar hissing cockroaches have been widely used in scientific research. For instance, Japanese scientists selected this species for experiments in developing remote-controlled cyborg cockroaches, as they are large enough to carry equipment without the interference of wings [20].
2. Materials and Methods
2.1. The Madagascar Hissing Cockroach
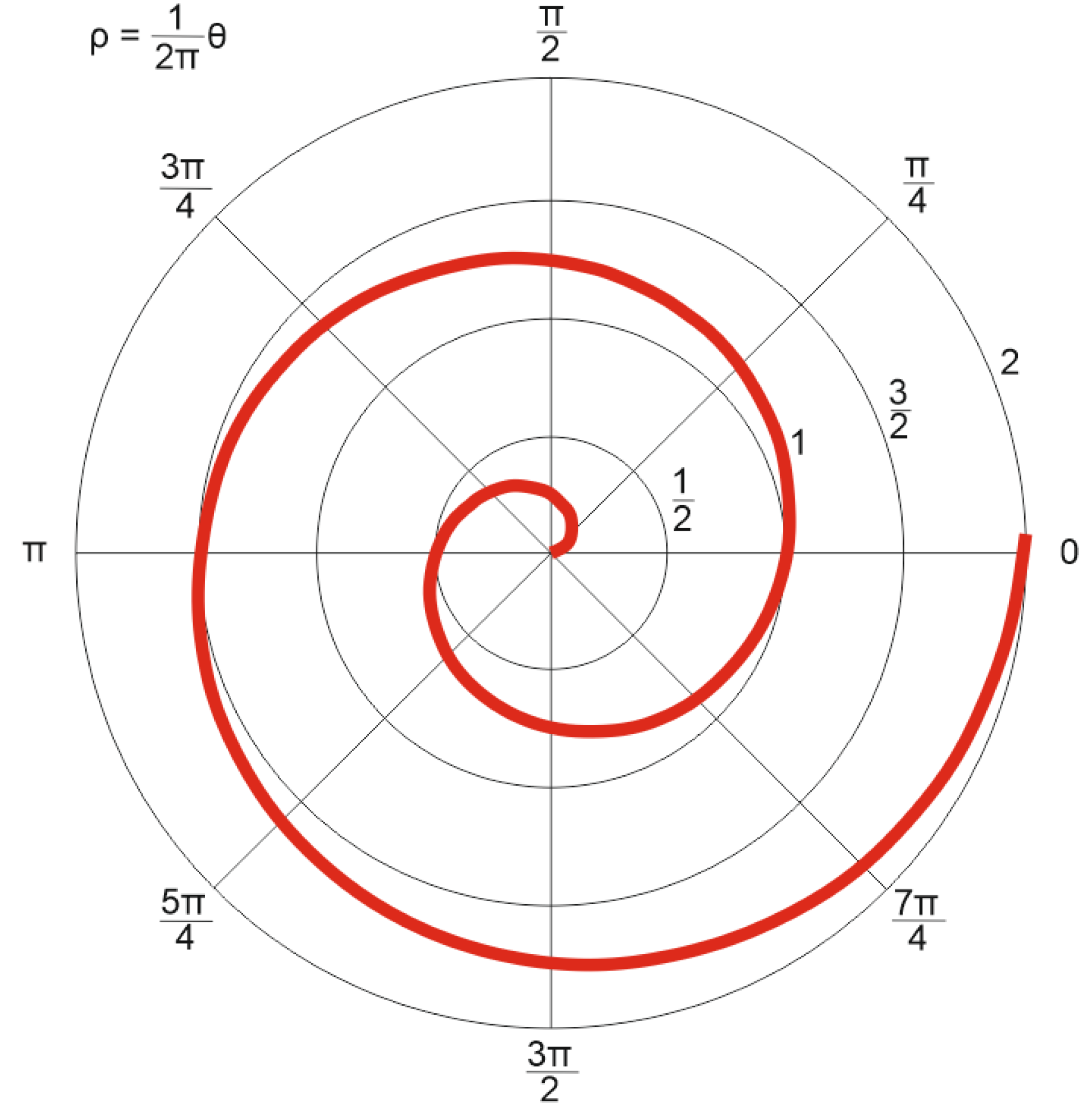
2.2. Distributed Acoustic Sensing
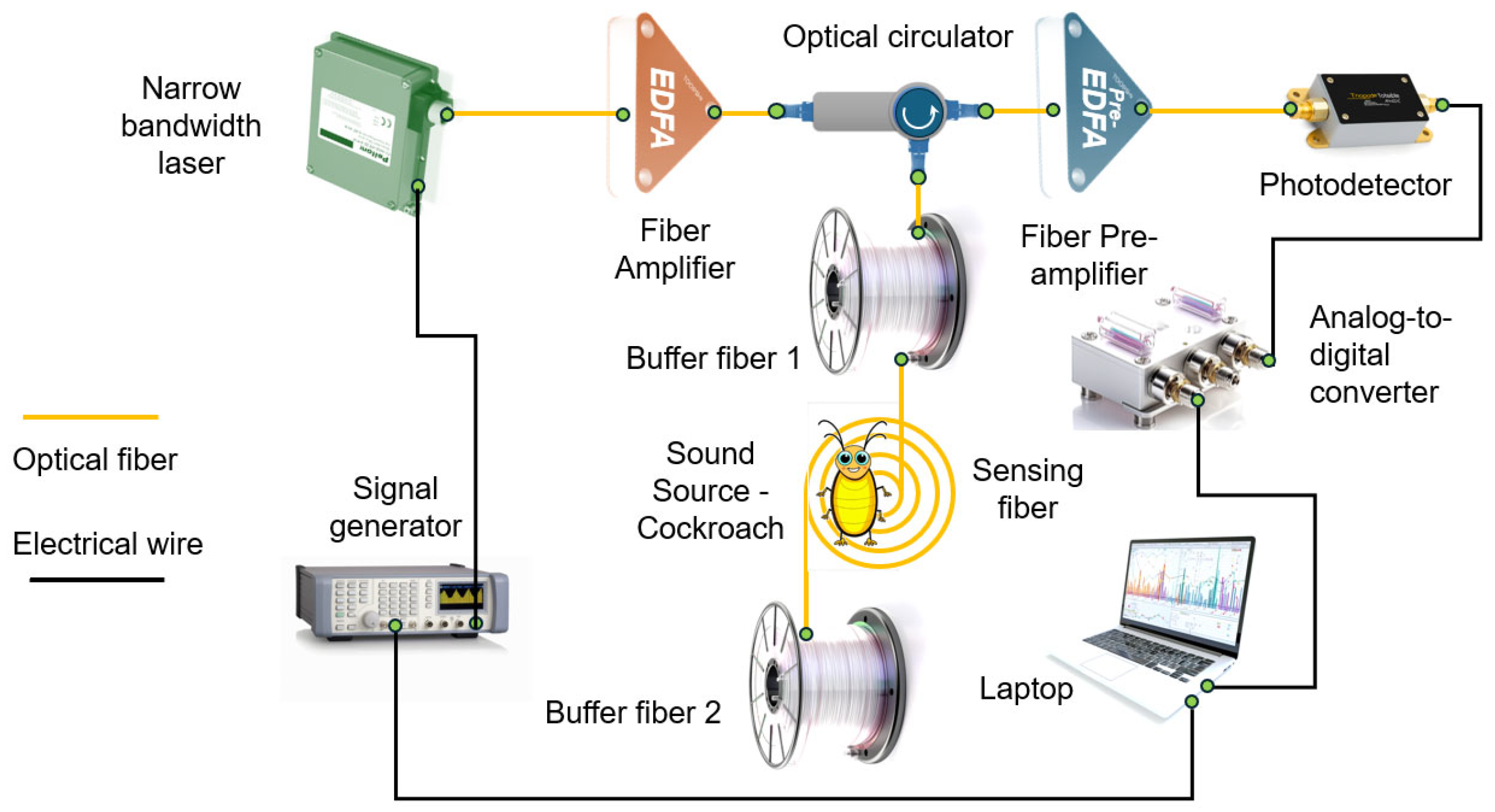
2.3. Experimental Setup
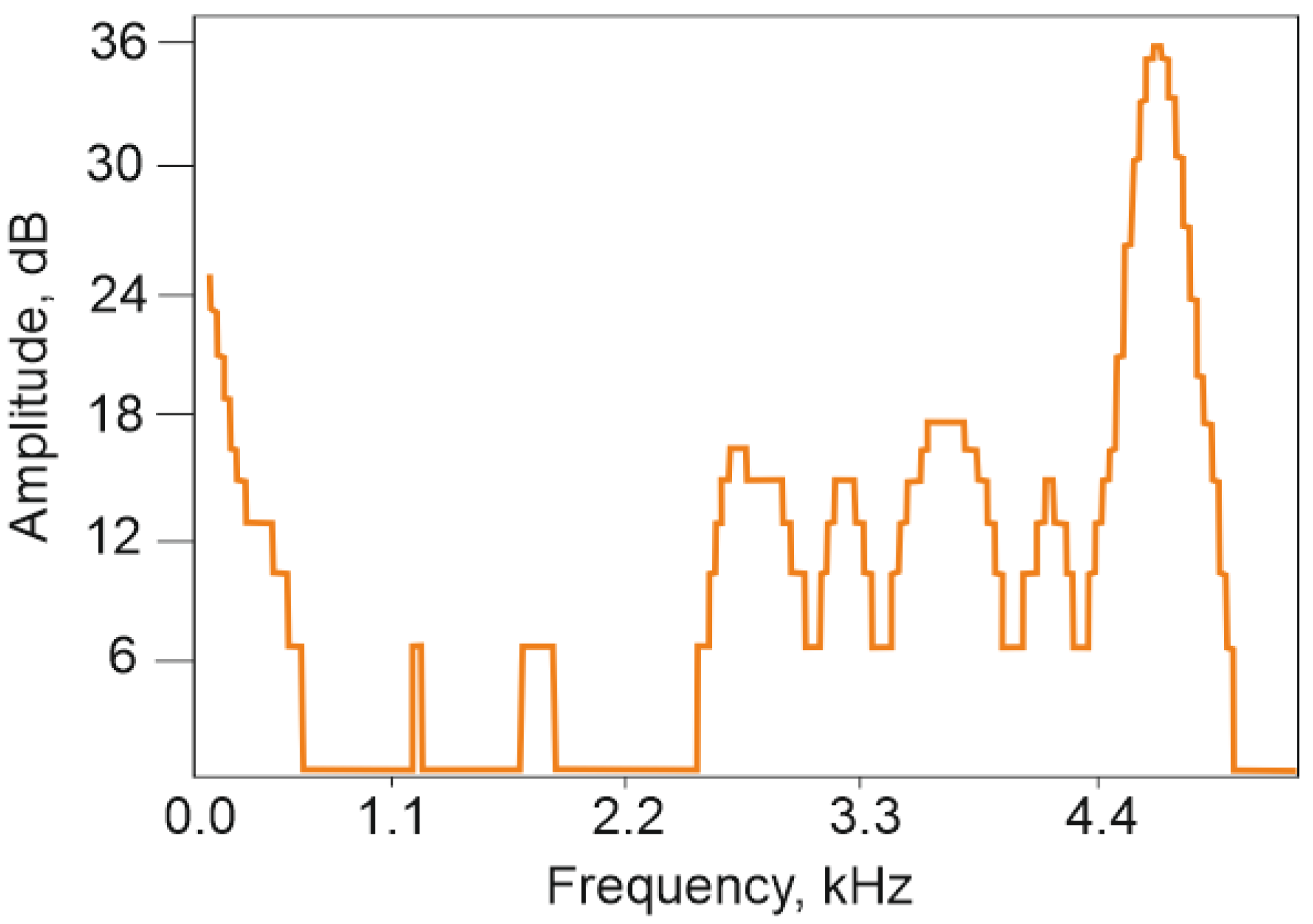
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chernutsky, A.O.; Gritsenko, T.V.; Zhirnov, A.A.; Orekhov, I.O.; Sazonkin, S.G.; Khan, R.I.; Dvoretskiy, D.A.; Pnev, A.B. Ultrashort pulse laser based Raman DTS for midrange FUT high spatial resolution measurements. In Proceedings of the 2024 International Conference Laser Optics (ICLO), Saint-Petersburg, Russia, 1–5 July 2024; p. 334. [Google Scholar]
- Gritsenko, T.V.; Chesnokov, G.Y.; Koshelev, K.I.; Khan, R.I.; Stepanov, K.V.; Valba, O.V.; Chernutsky, A.O.; Svelto, C.; Zhirnov, A.A.; Pnev, A.B.; et al. Optical Fiber Sensor for Real-Time Monitoring of Industrial Structures and Application to Urban Telecommunication Networks. In Proceedings of the 2023 IEEE International Conference on Metrology for eXtended Reality, Artificial Intelligence and Neural Engineering (MetroXRAINE), Milano, Italy, 25–27 October 2023; pp. 383–388. [Google Scholar]
- Tkachenko, A.Y.; Lobach, I.A.; Kablukov, S.I. Coherent Optical Frequency Reflectometry Based on a Fiber Self-Scanning Laser: Current Status and Development Prospects. Instrum. Exp. Tech. 2023, 66, 730–736. [Google Scholar] [CrossRef]
- Taranov, M.A.; Gorshkov, B.G.; Alekseev, A.E.; Konstantinov, Y.A.; Turov, A.T.; Barkov, F.L.; Wang, Z.; Zhao, Z.; Zan, M.S.D.; Kolesnichenko, E.V. Optical Reflectometry, Metrology, and Sensing. Present and Future. Instrum. Exp. Tech. 2023, 66, 713–729. [Google Scholar] [CrossRef]
- Ashry, I.; Mao, Y.; Wang, B.; Hveding, F.; Bukhamsin, A.Y.; Ng, T.K.; Ooi, B.S. A Review of Distributed Fiber–Optic Sensing in the Oil and Gas Industry. J. Light Technol. 2022, 40, 1407–1431. [Google Scholar]
- Ellmauthaler, A.; LeBlanc, M.; Bush, J.; Willis, M.E.; Maida, J.L.; Wilson, G.A. Real-time DAS VSP acquisition and processing on single-and multi-mode fibers. IEEE Sens. J. 2020, 21, 14847–14852. [Google Scholar] [CrossRef]
- Ren, L.; Jiang, T.; Jia, Z.G.; Li, D.S.; Yuan, C.L.; Li, H.N. Pipeline corrosion and leakage monitoring based on the distributed optical fiber sensing technology. Measurement 2018, 122, 57–65. [Google Scholar]
- Liang, S.; Zhang, C.; Lin, W.; Li, L.; Li, C.; Feng, X.; Lin, B. Fiber-optic intrinsic distributed acoustic emission sensor for large structure health monitoring. Opt. Lett. 2009, 34, 1858–1860. [Google Scholar]
- Stepanov, K.V.; Zhirnov, A.A.; Sazonkin, S.G.; Pnev, A.B.; Bobrov, A.N.; Yagodnikov, D.A. Non-invasive acoustic monitoring of gas turbine units by fiber optic sensors. Sensors 2022, 22, 4781. [Google Scholar] [CrossRef]
- Markvart, A.A.; Liokumovich, L.B.; Ushakov, N.A. Fiber optic SMS sensor for simultaneous measurement of strain and curvature. Tech. Phys. Lett. 2022, 48, 34. [Google Scholar]
- Anoshkin, A.N.; Voronkov, A.A.; Kosheleva, N.A.; Matveenko, V.P.; Serovaev, G.S.; Spaskova, E.M.; Shardakov, I.N.; Shipunov, G.S. Measurement of inhomogeneous strain fields by fiber optic sensors embedded in a polymer composite material. Mech. Solids 2016, 51, 542–549. [Google Scholar] [CrossRef]
- Lu, X.; Chruscicki, S.; Schukar, M.; Münzenberger, S.; Krebber, K. Application of intensity-based coherent optical time domain reflectometry to bridge monitoring. Sensors 2022, 22, 3434. [Google Scholar] [CrossRef]
- Juarez, J.C.; Taylor, H.F. Field test of a distributed fiber-optic intrusion sensor system for long perimeters. Appl. Opt. 2007, 46, 1968–1971. [Google Scholar] [CrossRef] [PubMed]
- Jabidin, H.Z.; Ibrahim, S.A.; Zan, M.S.D.; Musa, S.M.A.; Mansoor, A.; Ngo, H.Y.; Aziz, N.A.A.; Choo, K.Y.; Bakar, A.A.A.; Mokhtar, M.R.B.; et al. Review on Digital Signal Processing (DSP) Algorithm for Distributed Acoustic Sensing (DAS) for Ground Disturbance Detection. Int. J. Integr. Eng. 2024, 16, 102–113. [Google Scholar]
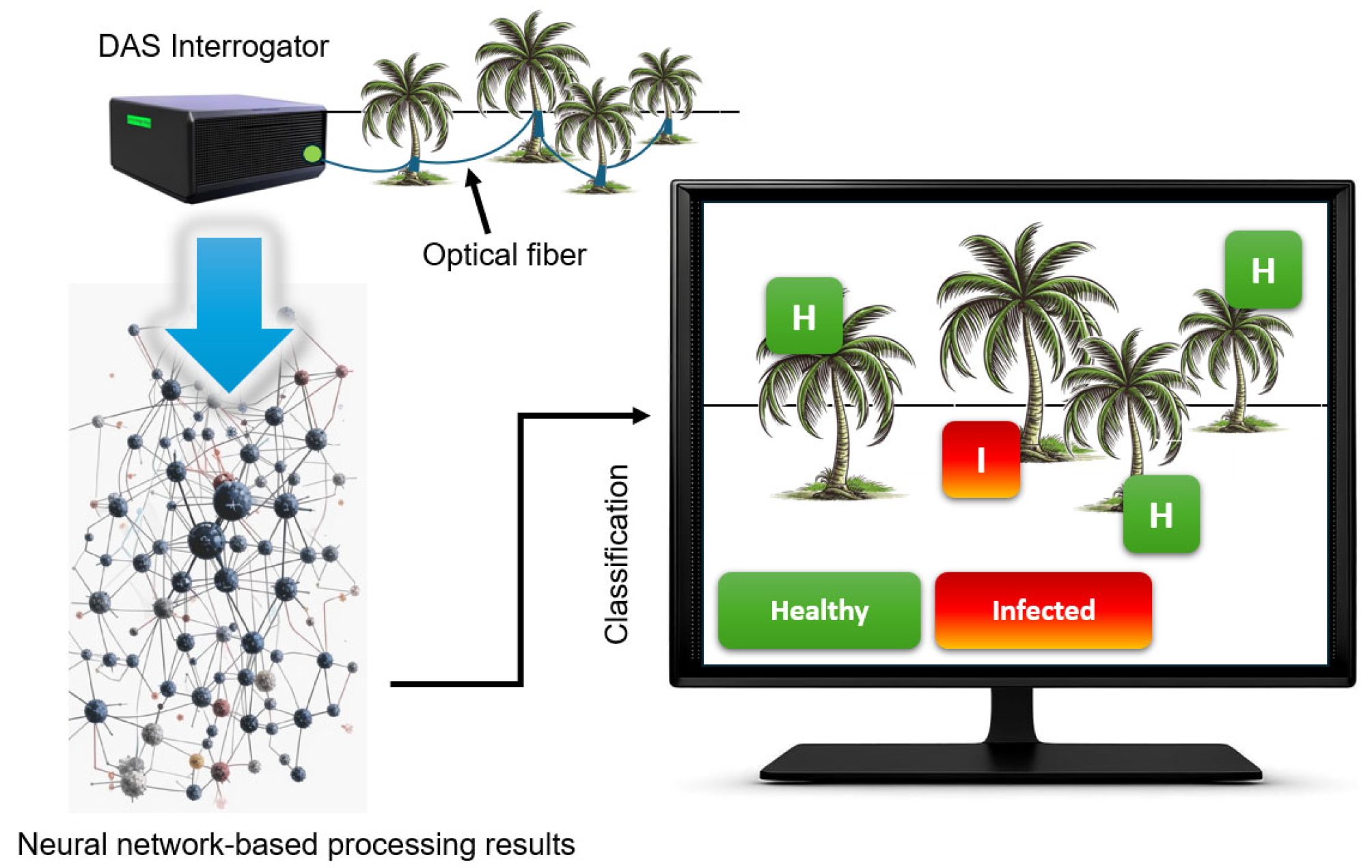
- Ashry, I.; Mao, Y.; Al-Fehaid, Y.; Al-Shawaf, A.; Al-Bagshi, M.; Al-Brahim, S.; Ng, T.K.; Ooi, B.S. Early detection of red palm weevil using distributed optical sensor. Sci. Rep. 2020, 10, 3155. [Google Scholar] [CrossRef] [PubMed]
- Khait, I.; Lewin-Epstein, O.; Sharon, R.; Saban, K.; Goldstein, R.; Anikster, Y.; Zeron, Y.; Agassy, C.; Nizan, S.; Sharabi, G.; et al. Sounds emitted by plants under stress are airborne and informative. Cell 2023, 186, 1328–1336. [Google Scholar] [CrossRef]
- Glaser, D.R.; Costley, R.D.; Hathaway, K.; Boitnott, G.; Weale, J. Snow coupled distributed acoustic sensing for intrusion detection of polar bears in arctic camps. In Symposium on the Application of Geophysics to Engineering and Environmental Problems 2021; Society of Exploration Geophysicists: Houston, TX, USA, 2021; p. 262. [Google Scholar]
- Zhu, T.; Stensrud, D.J. Characterizing thunder-induced ground motions using fiber-optic distributed acoustic sensing array. J. Geophys. Res. Atmos. 2019, 124, 12810–12823. [Google Scholar] [CrossRef]
- Morozov, O.; Tunakova, Y.; Hussein, S.M.; Shagidullin, A.; Agliullin, T.; Kuznetsov, A.; Valeev, B.; Lipatnikov, K.; Anfinogentov, V.; Sakhabutdinov, A. Addressed combined fiber-optic sensors as key element of multisensor greenhouse gas monitoring systems. Sensors 2022, 22, 4827. [Google Scholar] [CrossRef]
- Kakei, Y.; Katayama, S.; Lee, S.; Takakuwa, M.; Furusawa, K.; Umezu, S.; Sato, H.; Fukuda, K.; Someya, T. Integration of body-mounted ultrasoft organic solar cell on cyborg insects with intact mobility. NPJ Flex. Electron. 2022, 6, 78. [Google Scholar] [CrossRef]
- Nelson, M.C.; Fraser, J. Sound production in the cockroach, Gromphadorhina portentosa: Evidence for communication by hissing. Behav. Ecol. Sociobiol. 1980, 6, 305–314. [Google Scholar] [CrossRef]
- Clark, D.C.; Moore, A.J. Social communication in the Madagascar hissing cockroach: Features of male courtship hisses and a comparison of courtship and agonistic hisses. Behaviour 1995, 132, 401–417. [Google Scholar] [CrossRef]
- Escobedo, J.B.; Spirin, V.V.; López-Mercado, C.A.; Lucero, A.M.; Mégret, P.; Zolotovskii, I.O.; Fotiadi, A.A. Self-injection locking of the DFB laser through an external ring fiber cavity: Application for phase sensitive OTDR acoustic sensor. Results Phys. 2017, 7, 641–643. [Google Scholar] [CrossRef]
- Escobedo, J.B.; Jason, J.; López-Mercado, C.A.; Spirin, V.V.; Wuilpart, M.; Mégret, P.; Korobko, D.A.; Zolotovskiy, I.O.; Fotiadi, A.A. Distributed measurements of vibration frequency using phase-OTDR with a DFB laser self-stabilized through PM fiber ring cavity. Results Phys. 2019, 12, 1840–1842. [Google Scholar]
- Lopez-Mercado, C.A.; Korobko, D.A.; Zolotovskii, I.O.; Fotiadi, A.A. Application of dual-frequency self-injection locked DFB laser for Brillouin optical time domain analysis. Sensors 2021, 21, 6859. [Google Scholar] [CrossRef] [PubMed]
- Lu, P.; Lalam, N.; Badar, M.; Liu, B.; Chorpening, B.T.; Buric, M.P.; Ohodnicki, P.R. Distributed optical fiber sensing: Review and perspective. Appl. Phys. Rev. 2019, 6, 041302. [Google Scholar] [CrossRef]
- Martins, H.F.; Martin-Lopez, S.; Corredera, P.; Filograno, M.L.; Frazão, O.; González-Herráez, M. Coherent noise reduction in high visibility phase-sensitive optical time domain reflectometer for distributed sensing of ultrasonic waves. J. Light. Technol. 2013, 31, 3631–3637. [Google Scholar]
- Wang, B.; Mao, Y.; Ashry, I.; Al-Fehaid, Y.; Al-Shawaf, A.; Ng, T.; Yu, C.; Ooi, B. Towards Detecting Red Palm Weevil Using Machine Learning and Fiber Optic Distributed Acoustic Sensing. Sensors 2021, 21, 1592. [Google Scholar] [CrossRef]
- Abdollahi, M.; Giovenazzo, P.; Falk, T.H. Automated beehive acoustics monitoring: A comprehensive review of the literature and recommendations for future work. Appl. Sci. 2022, 12, 3920. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Turov, A.T.; Konstantinov, Y.A.; Totmina, E.E.; Votinova, A.G.; Masich, G.F.; Korobko, D.A.; Fotiadi, A.A. Registration of Sounds Emitted by the Madagascar Hissing Cockroach Using a Distributed Acoustic Sensor. Sensors 2025, 25, 2101. https://doi.org/10.3390/s25072101
Turov AT, Konstantinov YA, Totmina EE, Votinova AG, Masich GF, Korobko DA, Fotiadi AA. Registration of Sounds Emitted by the Madagascar Hissing Cockroach Using a Distributed Acoustic Sensor. Sensors. 2025; 25(7):2101. https://doi.org/10.3390/s25072101
Chicago/Turabian StyleTurov, Artem T., Yuri A. Konstantinov, Ekaterina E. Totmina, Anna G. Votinova, Grigoriy F. Masich, Dmitry A. Korobko, and Andrei A. Fotiadi. 2025. "Registration of Sounds Emitted by the Madagascar Hissing Cockroach Using a Distributed Acoustic Sensor" Sensors 25, no. 7: 2101. https://doi.org/10.3390/s25072101
APA StyleTurov, A. T., Konstantinov, Y. A., Totmina, E. E., Votinova, A. G., Masich, G. F., Korobko, D. A., & Fotiadi, A. A. (2025). Registration of Sounds Emitted by the Madagascar Hissing Cockroach Using a Distributed Acoustic Sensor. Sensors, 25(7), 2101. https://doi.org/10.3390/s25072101