
An Improved Fast Prediction Method for Full-Space Bistatic Acoustic Scattering of Underwater Vehicles


Abstract
:1. Introduction
2. Model Description
2.1. Multi-Static Acoustic Scattering Characteristics Transformation
2.1.1. Calculation of the Sound Source Density Matrix
2.1.2. Calculation of the Sound Source Density Function
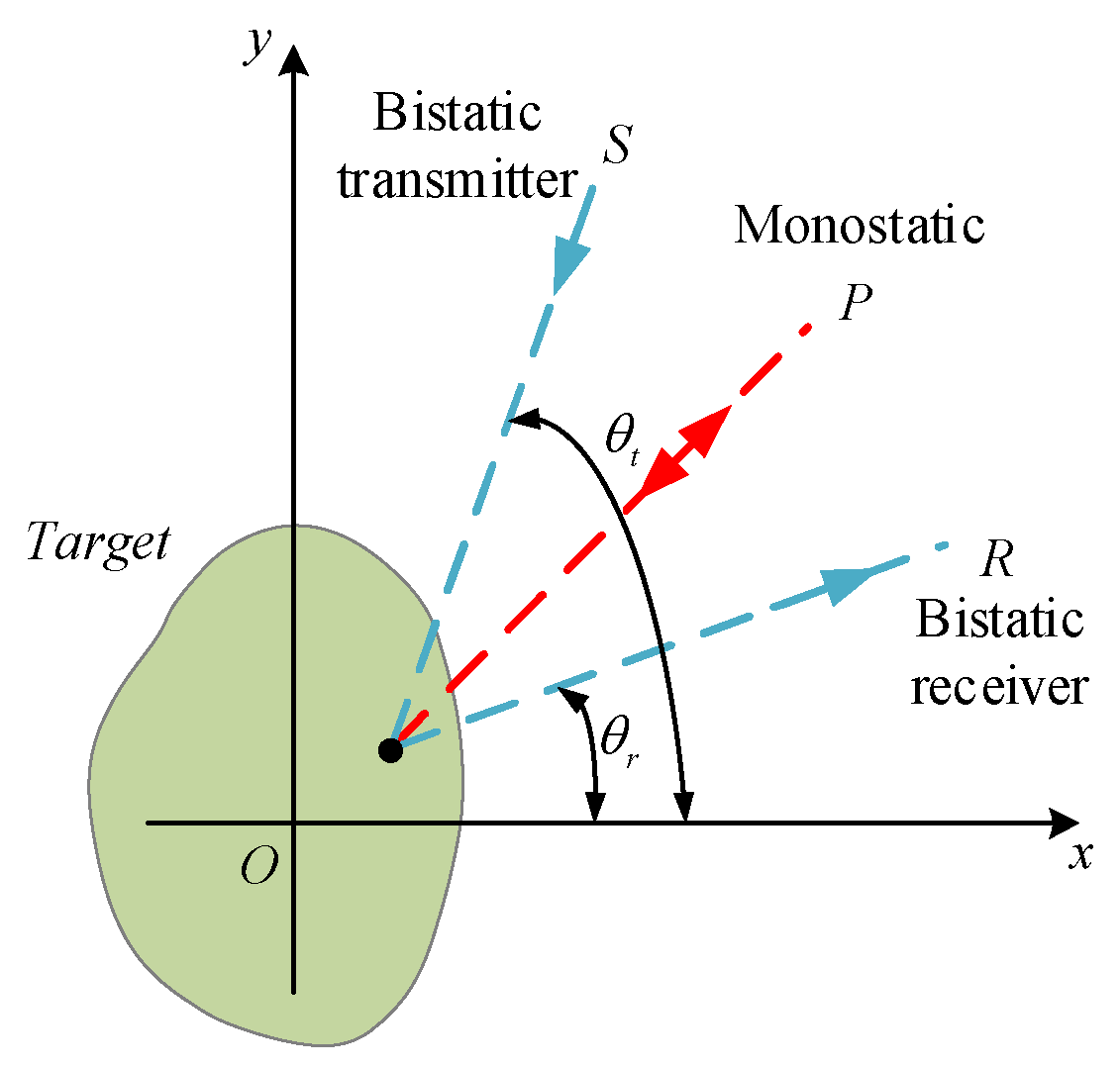
2.2. Monostatic to Bistatic Equivalence Theorem
3. Simulations
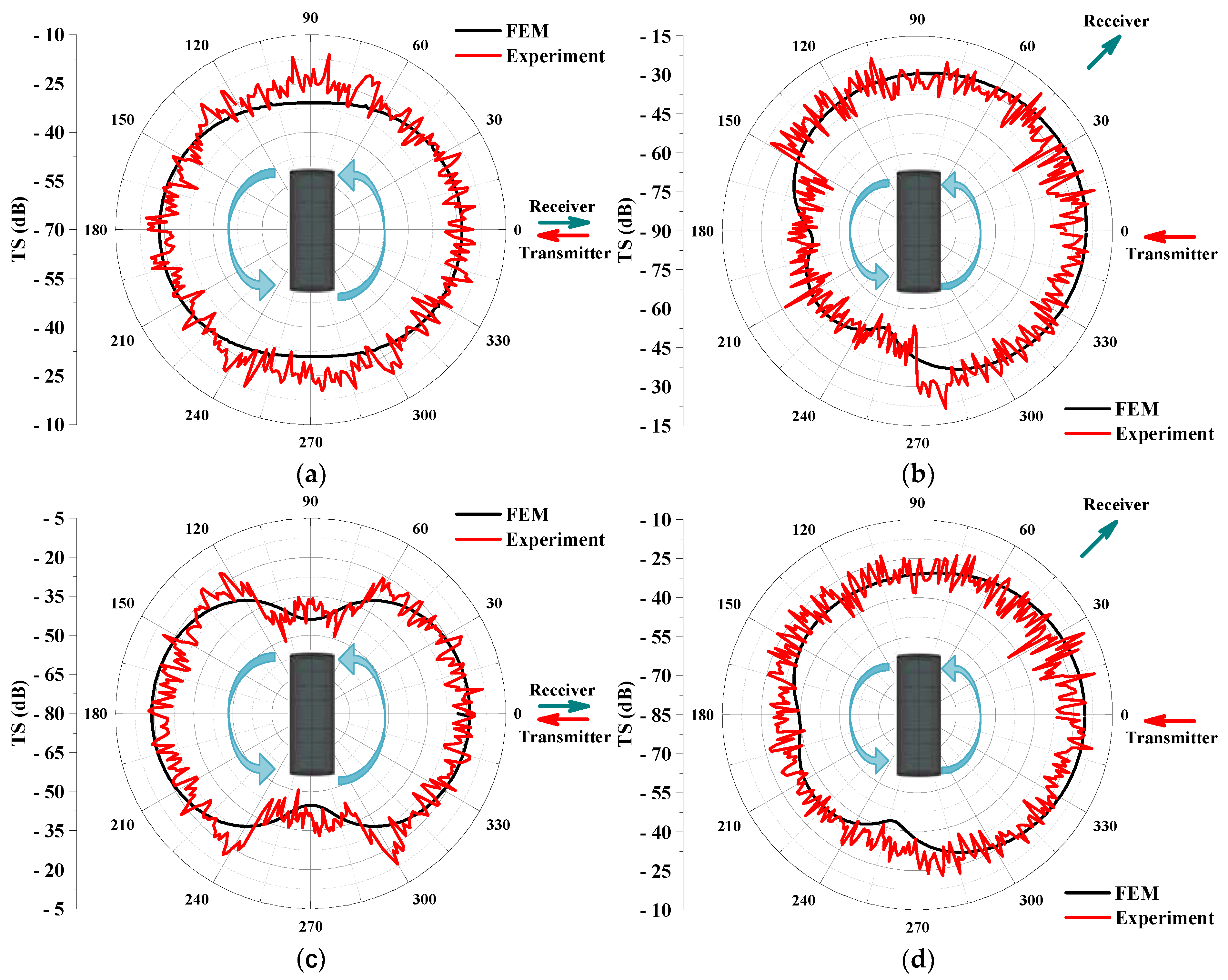
4. Experimental Results
5. Conclusions
- (1)
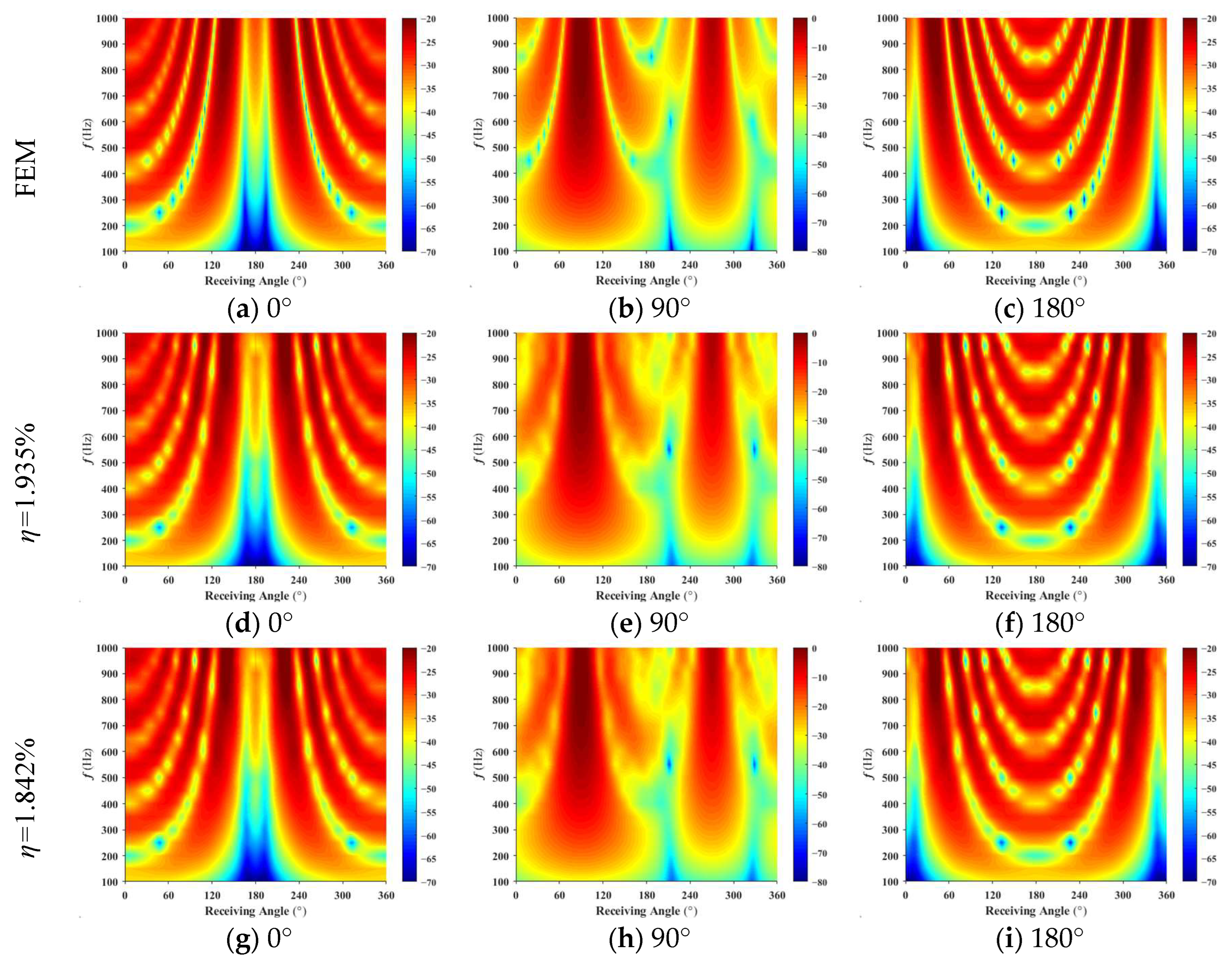
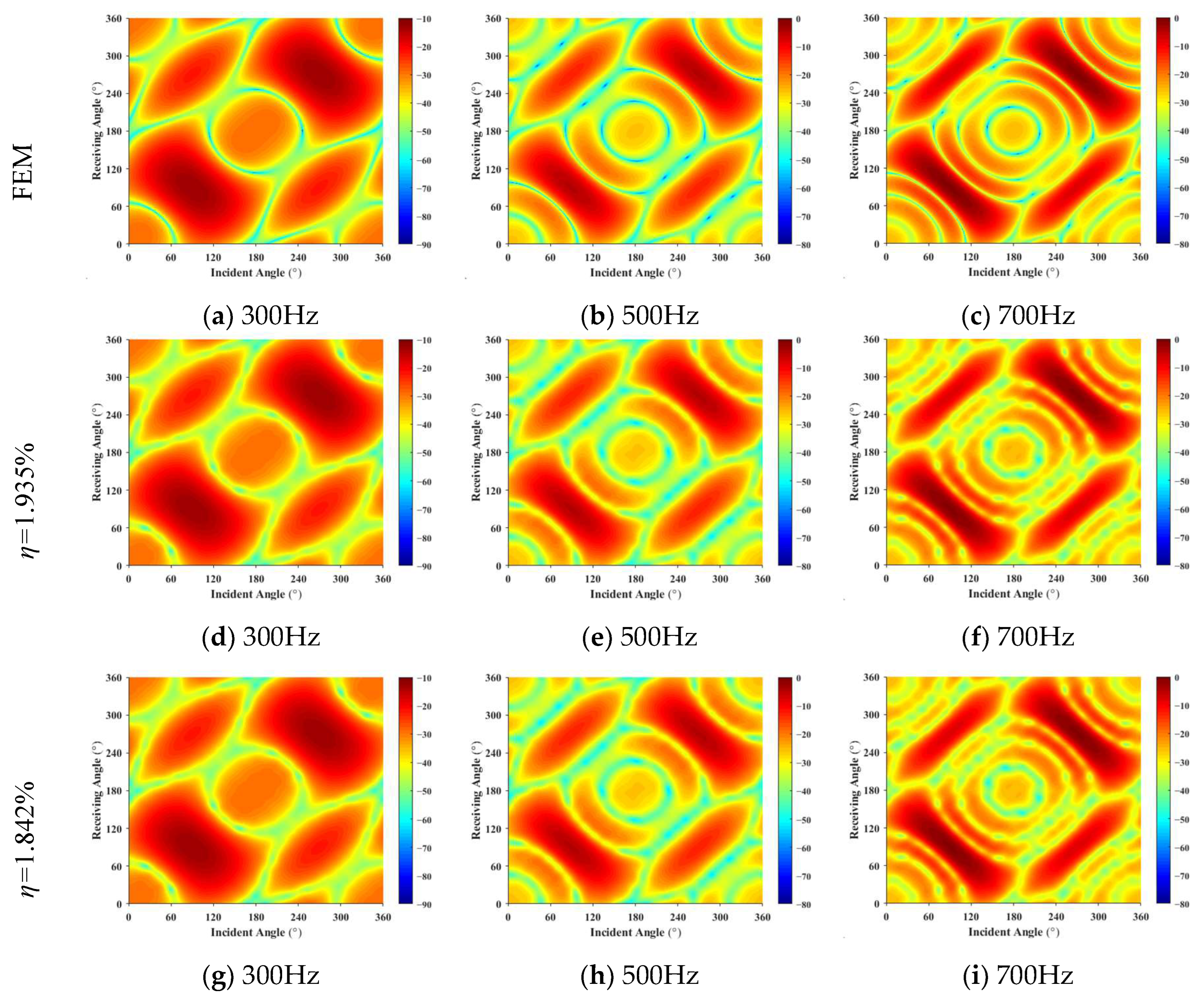
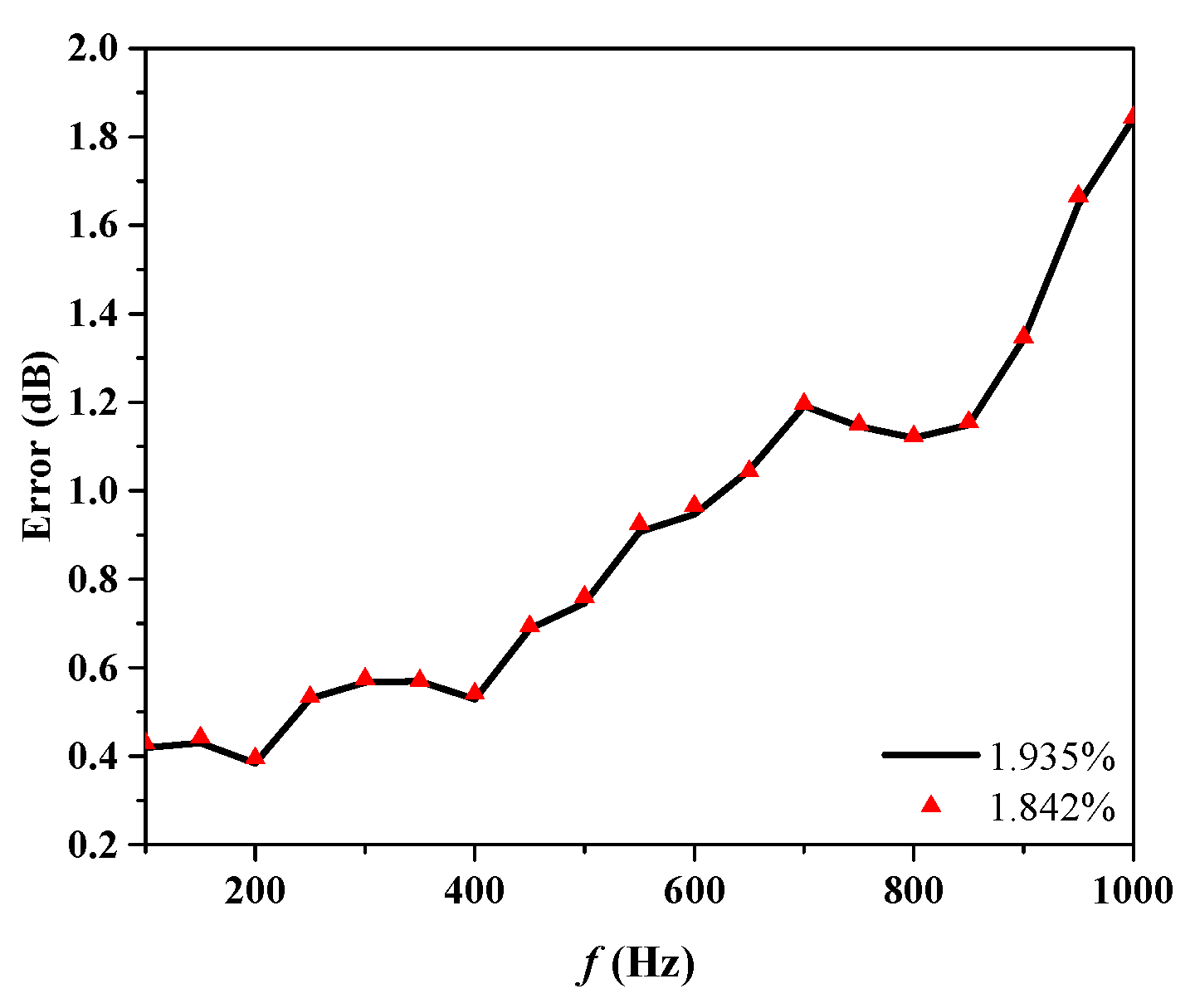
- This method extends the prediction technique to the scattering sound field of rotating targets in underwater vehicles. It requires only the target surface grid and a small amount of known scattering sound pressure data. When the ratio of input data to forecast data is 1.935%, the scattering characteristics of the vehicle are predicted with a reasonable degree of accuracy from 100 Hz to 1 kHz.
- (2)
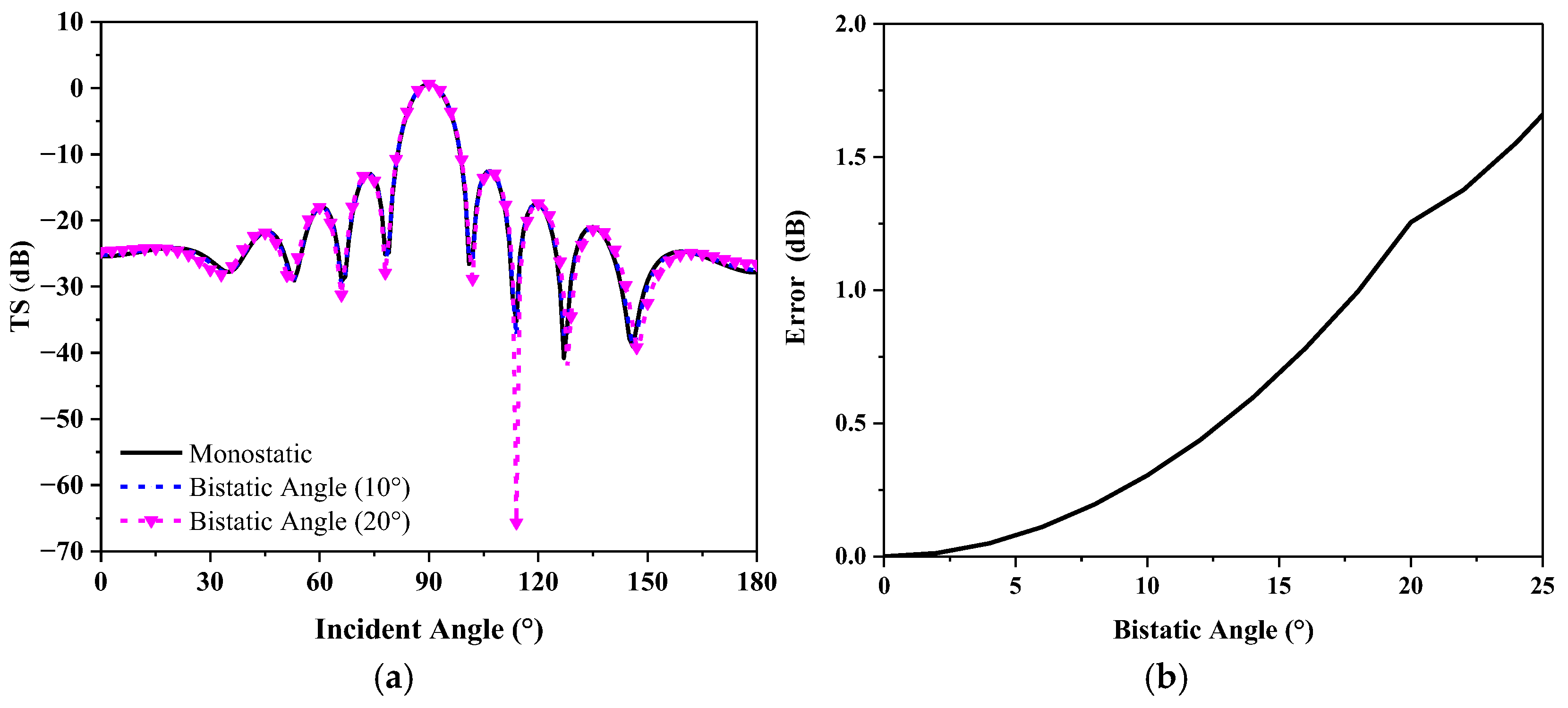
- The introduction of the monostatic to bistatic equivalence theorem into the scattering sound field prediction method reduced the input data by 4.7%, while maintaining similar prediction accuracy, significantly reducing the workload for testing or computation.
- (3)
- Experimental data measured at 500 Hz and 700 Hz were used to further validate the effectiveness of the proposed prediction method. When the ratio of input experimental data to forecast data was 4.4%, the average errors were 3.5 dB and 5.8 dB, respectively.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Foote, K.G. Underwater acoustic technology: Review of some recent developments. In Proceedings of the OCEANS 2008, Quebec, QC, Canada, 15–18 September 2008. [Google Scholar] [CrossRef]
- Srivastava, P.; Nichols, B.; Sabra, K.G. Passive underwater acoustic markers using Bragg backscattering. J. Acoust. Soc. Am. 2017, 142, EL573–EL578. [Google Scholar] [CrossRef] [PubMed]
- Mitri, F.G. Axisymmetric scattering of an acoustical Bessel beam by a rigid fixed spheroid. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2015, 62, 1809–1818. [Google Scholar] [CrossRef]
- Lee, K.; Seong, W. Time-domain Kirchhoff model for acoustic scattering from an impedance polygon facet. J. Acoust. Soc. Am. 2009, 126, EL14–EL21. [Google Scholar] [CrossRef] [PubMed]
- Mitri, F.G. Acoustic backscattering and radiation force on a rigid elliptical cylinder in plane progressive waves. Ultrasonics 2016, 66, 27–33. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Chai, Y.; Gui, Q.; Li, W. The imaging T-matrix method for acoustic scattering of the finite cylinder in wedge-shaped waveguide. Acta Acust. 2025, 50, 176–186. [Google Scholar] [CrossRef]
- Zhuo, L.K.; Fan, J.; Tang, W.L. Analyzing Acoustic Scattering of Elastic Objects Using Coupled FEM-BEM Technique. J. Shanghai Jiaotong Univ. 2009, 43, 1258–1261. [Google Scholar]
- Horoshenkov, K.V.; Van Renterghem, T.; Nichols, A. Finite difference time domain modelling of sound scattering by the dynamically rough surface of a turbulent open channel flow. Appl. Acoust. 2016, 110, 13–22. [Google Scholar] [CrossRef]
- Fan, J.; Tang, W.L.; Zhuo, L.K. Planar elements method for forecasting the echo characteristics from sonar targets. J. Ship Mech. 2012, 16, 171–180. [Google Scholar]
- Zheng, G.; Fan, J.; Tang, W. A modified planar elements method considering occlusion and secondary scattering. Acta Acust. 2011, 36, 377–383. [Google Scholar] [CrossRef]
- Fan, J.; Zhuo, L. Graphical acoustics computing method for echo characteristics calculation of underwater targets. Acta Acust. 2006, 31, 511–516. [Google Scholar] [CrossRef]
- Sammelmann, G.S. Propagation and scattering in very shallow water. In Proceedings of the OCEANS 2001, Honolulu, HI, USA, 5–8 November 2001. [Google Scholar] [CrossRef]
- Xue, Y.; Peng, Z.; Yu, Q.; Zhang, C.; Zhou, F.; Liu, J. Analysis of Acoustic Scattering Characteristics of Underwater Targets Based on Kirchhoff Approximation and Curved Triangular Mesh. Acta Armamentarii 2023, 44, 2424–2431. [Google Scholar] [CrossRef]
- Chai, P.C.; Chen, C.X.; Liu, Y.; Zhou, F.; Peng, Z. Acoustic scattering properties of underwater corner reflector complexes. Chin. J. Ship Res. 2023, 18, 83–91. [Google Scholar] [CrossRef]
- Wang, W.; Wang, B.; Fan, J.; Zhou, F.; Zhao, K.; Jiang, Z. A simulation method on target strength and circular SAS imaging of X-rudder UUV including multiple acoustic scattering. Def. Technol. 2023, 23, 214–228. [Google Scholar] [CrossRef]
- Burkholder, R.J.; Lundin, T. Forward-backward iterative physical optics algorithm for computing the RCS of open-ended cavities. IEEE Trans. Antennas Propag. 2005, 53, 793–799. [Google Scholar] [CrossRef]
- Jones, D.S. Fourier Transforms and the Method of Stationary Phase. IMA J. Appl. Math. 1966, 2, 197–222. [Google Scholar] [CrossRef]
- Liu, J.; Peng, Z.; Fan, J.; Liu, Y.; Kong, H. Acoustic Scattering Prediction Method of Underwater Vehicles Based on Slice-parameterized Multi-highlight Model. Acta Armamentarii 2023, 44, 517–525. [Google Scholar] [CrossRef]
- Tan, L.W.; Wang, B.; Fan, J. A fast method for calculating bistatic acoustic target strength of an underwater target. J. Ship Mech. 2020, 24, 1215–1223. [Google Scholar] [CrossRef]
- Zheng, G.; Fan, J. Study on Target Echo Characteristics for Bistatic Sonar. In Proceedings of the National Acoustics Conference on Underwater Acoustics 2005, Fujian, China, 1–4 December 2005. [Google Scholar]
- Wang, B.; Wang, W.H.; Fan, J.; Zhao, K.; Zhou, F.; Tan, L. Modeling of bistatic scattering from an underwater non-penetrable target using a Kirchhoff approximation method. Def. Technol. 2022, 18, 1097–1106. [Google Scholar] [CrossRef]
- Liu, C.Y.; Zhang, M.M.; Wang, Y.L. Calculation of target bistatic acoustic scattering using physical acoustic method. J. Nav. Univ. Eng. 2012, 24, 101–103. [Google Scholar] [CrossRef]
- Schenck, H.A.; Benthien, G.W.; Barach, D. A hybrid method for predicting the complete scattering function from limited data. J. Acoust. Soc. Am. 1995, 98, 3469–3481. [Google Scholar] [CrossRef]
- Chen, C.X.; Peng, Z.L.; Song, H.; Xue, Y.; Zhou, F. Prediction Method of the Low-Frequency Multistatic Scattering Sound Field for Underwater Spherical Targets Based on Limited Data. J. Shanghai Jiaotong Univ. 2024, 58, 1006–1017. [Google Scholar] [CrossRef]
- Chen, C.; Peng, Z.; Song, H.; Fan, J.; Xue, Y. Fast prediction method of full-space bistatic scattering sound field of underwater stiffened double cylindrical shell. Acta Acust. 2024, 49, 78–88. [Google Scholar] [CrossRef]
- Kell, R.E. On the derivation of bistatic RCS from monostatic measurements. Proc. IEEE 1965, 53, 983–988. [Google Scholar] [CrossRef]
- Bradley, C.J.; Collins, P.J.; Falconer, D.G.; Terzuoli, A. Evaluation of a near-field monostatic-to-bistatic equivalence theorem. IEEE Trans. Geosci. Remote Sens. 2008, 46, 449–457. [Google Scholar] [CrossRef]
- Gabig, S.J.; Wilson, K.; Collins, P.J.; Terzuoli, A.; Nesti, G.; Fortuny, J. Validation of near-field monostatic to bistatic equivalence theorem. In Proceedings of the IEEE 2000 International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 24–28 July 2000. [Google Scholar] [CrossRef]
- Feng, F.; Che, G.M. Principles of Numerical Analysis; Science Press: Beijing, China, 2008. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position | Component Parts | Geometric Parameters (Unit: m) | |
|---|---|---|---|
| Bow | semi-ellipsoid | Long Semi-Axis | 0.46 |
| Short Semi-Axis | 0.25 | ||
| Midship | Cylinder | Radius | 0.25 |
| Height | 2.97 | ||
| Stern | Frustum | Large Bottom Radius | 0.25 |
| Small Bottom Radius | 0.02 | ||
| Height | 0.70 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, R.; Peng, Z.; Xue, Y.; Xu, C.; Chen, C. An Improved Fast Prediction Method for Full-Space Bistatic Acoustic Scattering of Underwater Vehicles. Sensors 2025, 25, 2612. https://doi.org/10.3390/s25082612
Gu R, Peng Z, Xue Y, Xu C, Chen C. An Improved Fast Prediction Method for Full-Space Bistatic Acoustic Scattering of Underwater Vehicles. Sensors. 2025; 25(8):2612. https://doi.org/10.3390/s25082612
Chicago/Turabian StyleGu, Ruichong, Zilong Peng, Yaqiang Xue, Cong Xu, and Changxiong Chen. 2025. "An Improved Fast Prediction Method for Full-Space Bistatic Acoustic Scattering of Underwater Vehicles" Sensors 25, no. 8: 2612. https://doi.org/10.3390/s25082612
APA StyleGu, R., Peng, Z., Xue, Y., Xu, C., & Chen, C. (2025). An Improved Fast Prediction Method for Full-Space Bistatic Acoustic Scattering of Underwater Vehicles. Sensors, 25(8), 2612. https://doi.org/10.3390/s25082612