


Normalised Diagnostic Contribution Index (NDCI) Integration to Multi Objective Sensor Optimisation Framework (MOSOF)—An Environmental Control System Case


Abstract
1. Introduction
- Overall Performance: A composite index that incorporates the normalised NDCI alongside other performance measures.
- Cost of Sensor Deployment: Minimising expenses while ensuring adequate diagnostic coverage.
- Reliability and Operational Efficiency: Enhancing system robustness through optimal sensor integration.
- Secondary Criteria: Considerations such as OEM compatibility or benefit-to-cost ratios, particularly pertinent to airline operations and MRO scenarios [16].
- Integration of Non-Dominated Criteria Identification (NDCI) into the Multi-Objective Sensor Optimisation Framework (MOSOF) for enhanced diagnostics applications.
- Application in Boeing 737-800 ECS Simulation (SESAC), focusing on degradation modes.
- Optimal resource utilisation and sensor design implementation aspects.
- Scalable framework addressing multi-stakeholder requirements in complex systems.
2. NDCI Integration into MOSOF
2.1. Rationale for NDCI-Centric Sensor Evaluation
2.2. Theoretical Underpinnings of NDCI
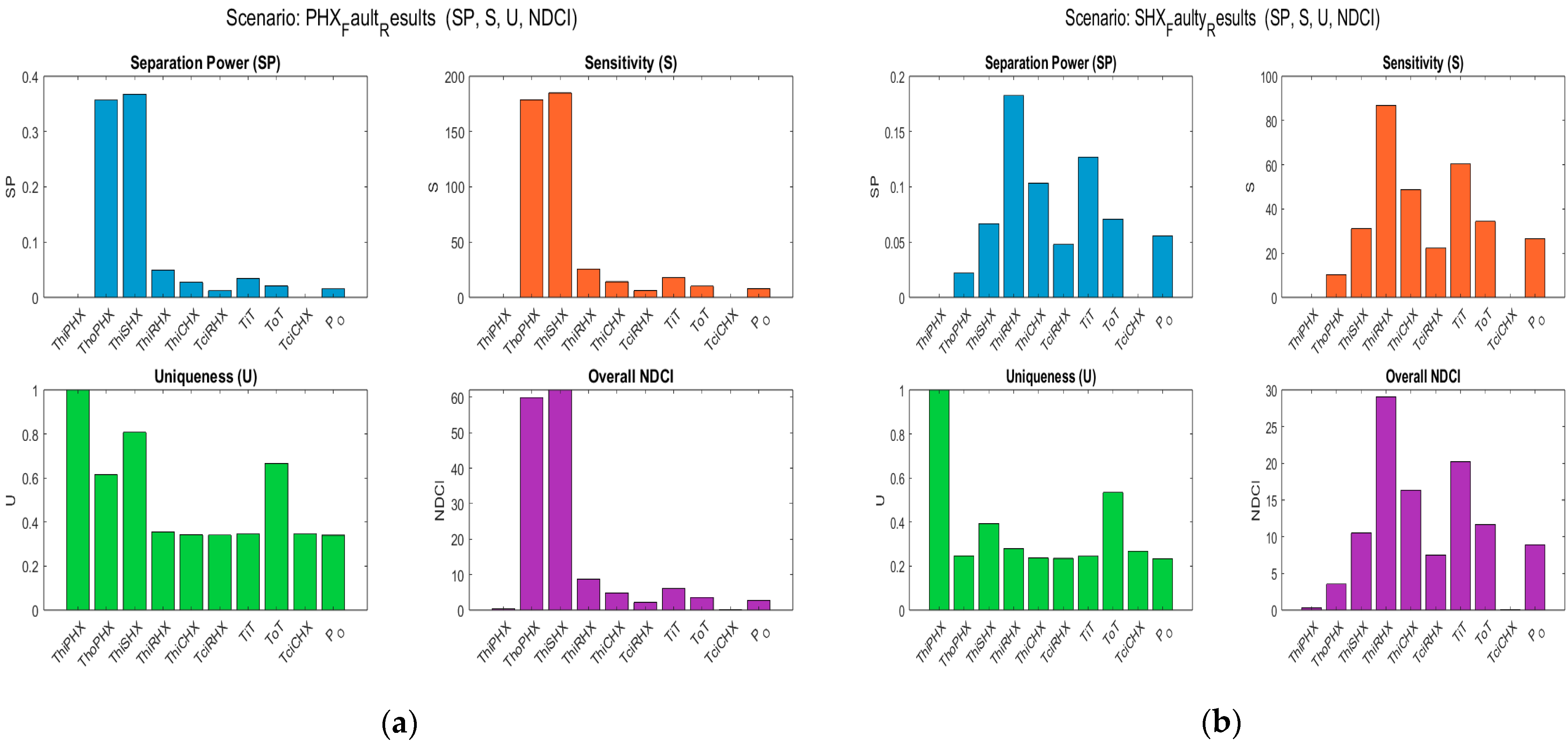
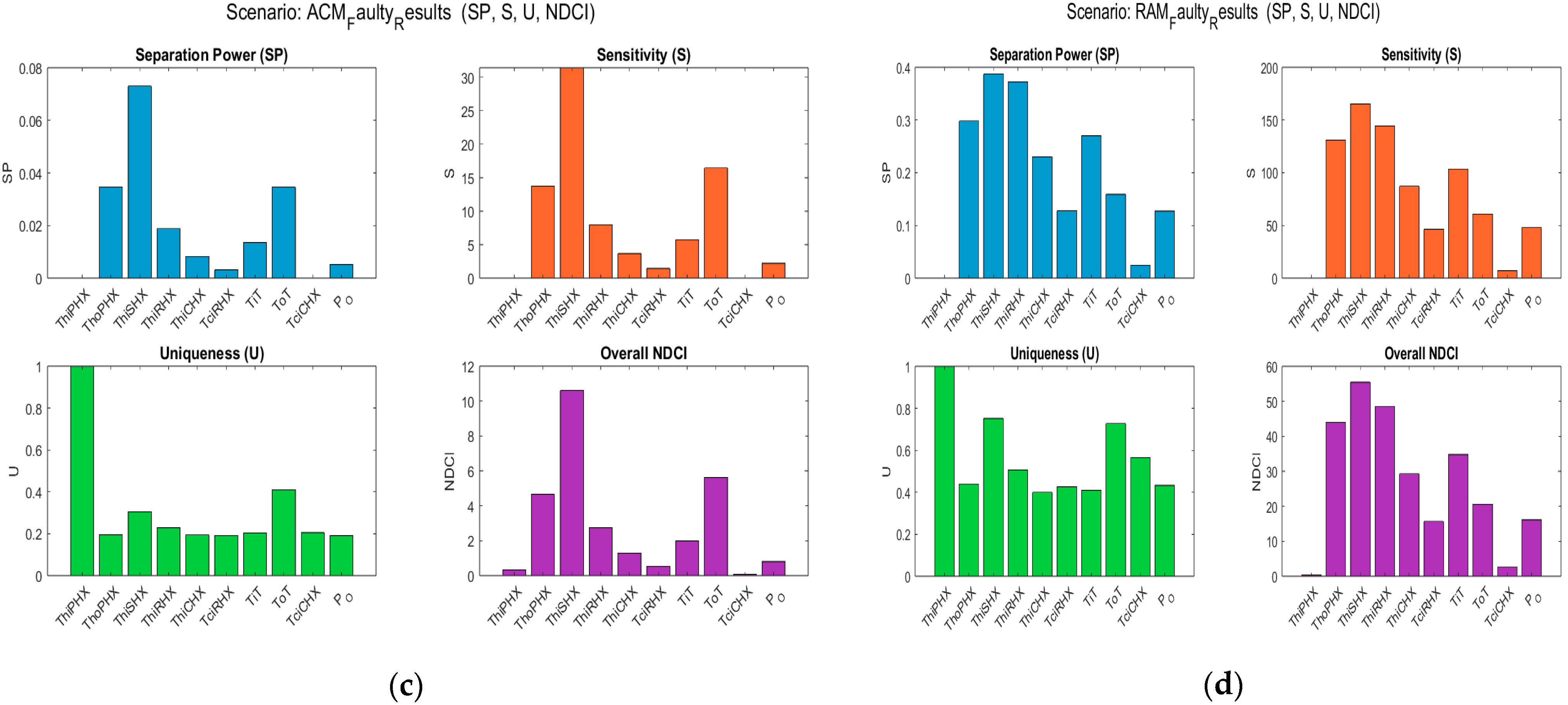
- Separation Power (SP): For each sensor, SP is calculated by taking the absolute difference between the sensor’s output under fault conditions and its healthy baseline, then normalising this difference by the range of the healthy values. Mathematically, if [yf] is the sensor reading under fault and [yh] is the healthy reading, SP is given by the following:
- Sensitivity (S): Sensitivity captures the relative change in sensor output with respect to deviations in system performance. This is computed by normalising the same absolute difference by the complement of a fault severity indicator (or degradation level), ensuring that even small but significant changes are recognised:
- Uniqueness (U): Uniqueness assesses the degree to which a sensor’s responses differ from those of other sensors. By calculating the average Euclidean distance between the sensor’s fault-response vector and those of its peers, and then normalising by the maximum observed distance, U is defined as follows:
2.3. Proposed Methodology for NDCI-MOSOF Integration
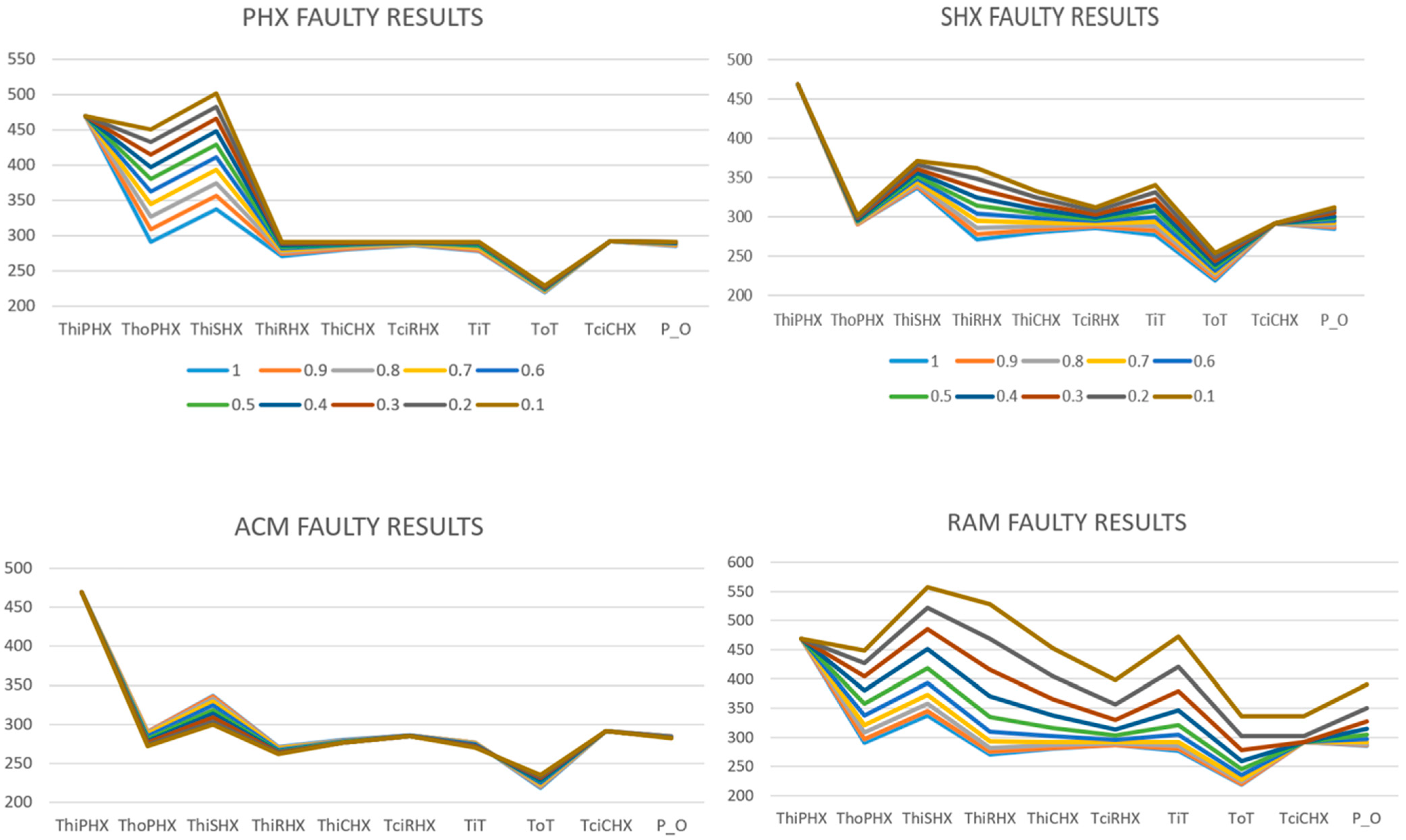
- Input Data Preparation:The process begins by loading multi-scenario data from an Excel file (e.g., SESAC1.xlsx). Each sheet corresponds to a distinct scenario (or fault type), including a healthy baseline row and multiple fault rows. This step consolidates all necessary information—sensor readings, fault severity indicators (Deg), and baseline values—into a structured format.
- Scenario Processing (SP, S, U Computation):For each scenario, the algorithm calculates three metrics for every sensor:
- -
- Separation Power (SP): Normalised difference between fault and healthy measurements.
- -
- Sensitivity (S): Relative change in sensor output scaled by the fault severity.
- -
- Uniqueness (U): Distinctiveness of a sensor’s fault signatures compared to those of other sensors in the same scenario.
These metrics are then averaged to produce the scenario-level NDCI for each sensor, providing a quantitative measure of diagnostic performance across multiple fault conditions. - Filtering Constant Sensors:After processing all scenarios, sensors that exhibit negligible variation (below a specified threshold) are removed to eliminate redundant or uninformative signals. This ensures that subsequent analyses focus only on sensors capable of contributing meaningful diagnostic information.
- Aggregating Scenario Data for Global Analysis:The NDCI values and the underlying fault data from each scenario are compiled into global matrices. This consolidated view facilitates system-wide comparisons and ensures consistency when deriving overall sensor rankings.
- Overall NDCI Ranking:An overall average NDCI is computed across all scenarios, and sensors are ranked accordingly. This ranking highlights those sensors that consistently demonstrate high diagnostic value in multiple fault conditions.
- Coverage-Based Subset Selection (Per Scenario):Each scenario undergoes a coverage analysis, which measures how effectively a subset of sensors (chosen in descending order of their NDCI or mRMR scores) captures the scenario’s total diagnostic capability. Once the subset meets a predefined coverage threshold (e.g., 95% of maximum possible NDCI), no further sensors are added.
- Union of Minimal Subsets:The minimal subsets identified per scenario are combined to form a single, system-wide sensor set. This ensures that unique fault modes in different scenarios are adequately covered without inflating sensor counts unnecessarily.
- Final Sensor Selection and Output:The resulting sensor set, along with the intermediate rankings (NDCI-based and mRMR-based) and coverage analyses, is presented as the final output. This includes visualisations comparing top-k sensors by NDCI versus mRMR and any additional metrics relevant to cost or reliability.
3. Multi-Objective Optimisation Framework
3.1. Problem Formulation and Decision Variables
3.2. Objective Functions
- Performance (f1):This objective is a weighted combination of normalised NDCI and an additional performance metric (for example, accuracy in the OEM scenario or a blend of normalised NDCI and coverage for Airlines and MRO). It is expressed as follows:
- Cost (f2):
- Reliability/Efficiency (f3):This objective promotes robust sensor performance by being defined as the negative of a normalised reliability (or efficiency) measure:
- Secondary Criterion (f4):For OEM applications, this is typically the negative of normalised compatibility; for Airlines and MRO, a benefit-to-cost ratio is adopted. For example, in the OEM scenario:
3.3. Optimisation Setup
- Binary Selection Constraint:
- ○
- Each sensor decision variable must be binary, i.e., xi ∈ {0, 1} for all i = 1, …, n, with Σ (from i = 1 to n) xi = 2.
- Budget Constraint:
- ○
- The total cost of the selected sensors must not exceed a predefined budget B:Σ (xi · ci) ≤ B.
- Performance Thresholds:Minimum acceptable levels are imposed on key metrics:
- -
- The sum of NDCI values must be at least Tₙdci:Σ (xi · NDCIi) ≥ Tₙdci.
- -
- The average accuracy (or equivalent performance metric) must be at least Aₘiₙ:(Σ (xi · pi))/(Σ xi) ≥ Aₘiₙ.
- -
- The total reliability (or efficiency) must be at least Rₘiₙ:
Σ (xi · ri) ≥ Rₘiₙ.
4. Experimental Results and Analysis
4.1. Simulation Setup and Parameter Specifications
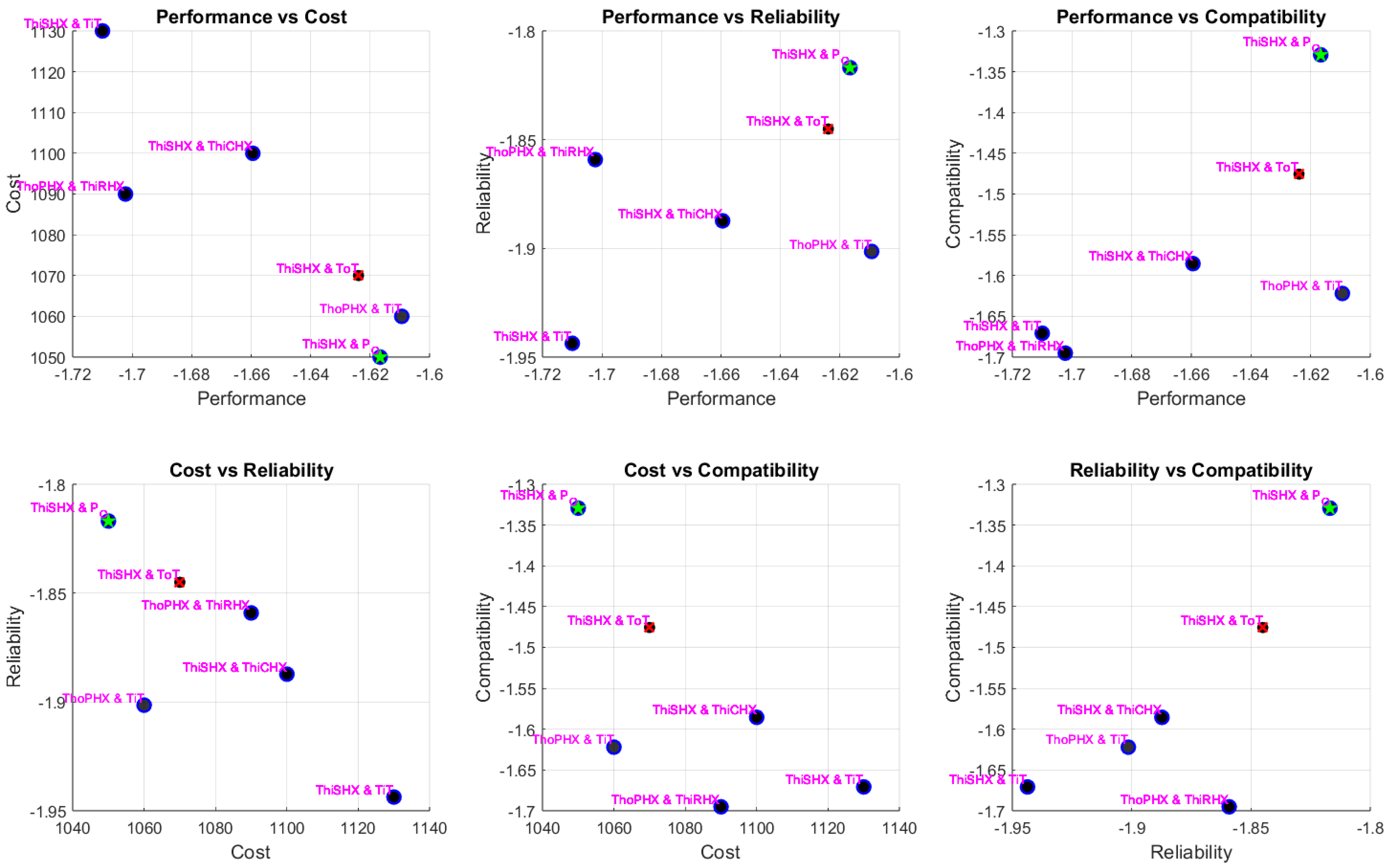
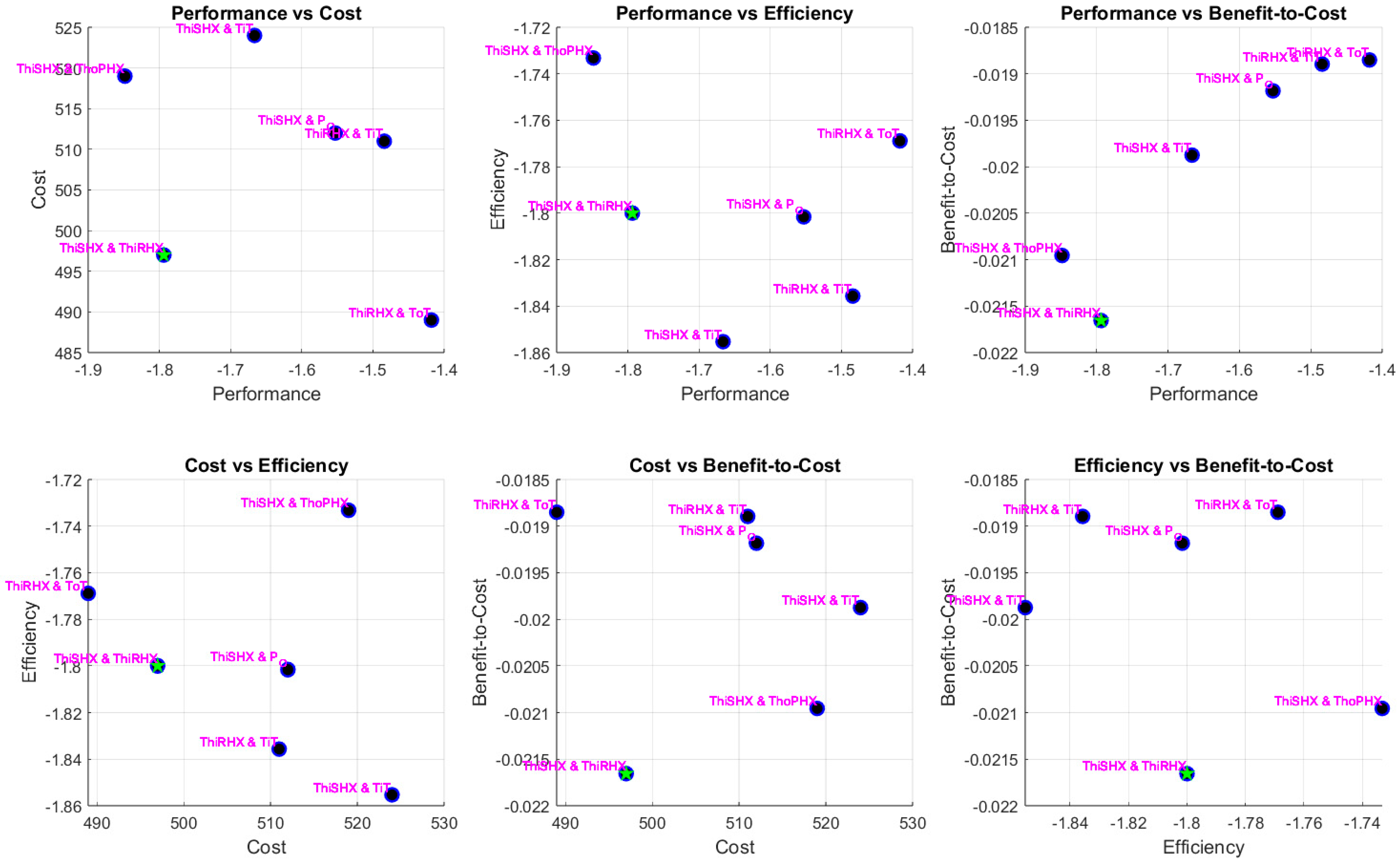
4.2. Pareto Front Analysis and Sensor Pair Configurations
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vachtsevanos, G.; Lewis, F.; Roemer, M.; Hess, A.; Wu, B. Intelligent Fault Diagnosis and Prognosis for Engineering Systems; Wiley: Hoboken, NJ, USA, 2007. [Google Scholar] [CrossRef]
- Lei, Y.; Li, N.; Guo, L.; Li, N.; Yan, T.; Lin, J. Machinery health prognostics: A systematic review from data acquisition to RUL prediction. Mech. Syst. Signal Process. 2018, 104, 799–834. [Google Scholar] [CrossRef]
- Peng, H.; Long, F.; Ding, C. Feature selection based on mutual information: Criteria of Max-Dependency, Max-Relevance, and Min-Redundancy. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1226–1238. [Google Scholar] [CrossRef]
- Aljawarneh, M.; Hamdaoui, R.; Zouinkhi, A.; Boussaid, B.; Abdelkrim, M.N. Energy efficiency approaches in Wireless Sensor Networks. In Proceedings of the 2022 IEEE 21st International Conference on Sciences and Techniques of Automatic Control and Computer Engineering, STA 2022-Proceedings, Sousse, Tunisia, 19–21 December 2022. [Google Scholar] [CrossRef]
- Jo, I.; Lee, S.; Oh, S. Improved measures of redundancy and relevance for mRMR feature selection. Computers 2019, 8, 42. [Google Scholar] [CrossRef]
- Santi, L.M.; Sowers, T.S.; Aguilar, R.B. Optimal sensor selection for health monitoring systems. In Proceedings of the 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Tucson, Arizona, 10–13 July 2005. [Google Scholar] [CrossRef]
- Yang, S.-M.; Qiu, J.; Liu, G.-J.; Yang, P. Sensor Selection and Optimization for Aerospace System Health Management under Uncertainty Testing. Trans. Jpn. Soc. Aeronaut. Space Sci. 2013, 56, 187–196. [Google Scholar] [CrossRef]
- Esperon-Miguez, M.; Jennions, I.K.; Escobar, I.C.; Hanov, N. Simulating faults in a boeing 737-200 environmental control system using a thermodynamic model. Int. J. Progn. Health Manag. 2019, 10, 3–4. [Google Scholar] [CrossRef]
- Jia, L.; Ezhilarasu, C.M.; Jennions, I.K. Cross-Condition Fault Diagnosis of an Aircraft Environmental Control System (ECS) by Transfer Learning. Appl. Sci. 2023, 13, 13120. [Google Scholar] [CrossRef]
- Xu, Z.; Guo, Y.; Saleh, J.H. Multi-objective optimization for sensor placement: An integrated combinatorial approach with reduced order model and Gaussian process. Measurement 2022, 187, 110370. [Google Scholar] [CrossRef]
- Lee, K.; Han, S.; Pham, V.H.; Cho, S.; Choi, H.-J.; Lee, J.; Noh, I.; Lee, S.W. Multi-objective instance weighting-based deep transfer learning network for intelligent fault diagnosis. Appl. Sci. 2021, 11, 2370. [Google Scholar] [CrossRef]
- Kabashkin, I.; Perekrestov, V.; Tyncherov, T.; Shoshin, L.; Susanin, V. Framework for Integration of Health Monitoring Systems in Life Cycle Management for Aviation Sustainability and Cost Efficiency. Sustainability 2024, 16, 6154. [Google Scholar] [CrossRef]
- Suslu, B.; Ali, F.; Jennions, I.K. Understanding the Role of Sensor Optimisation in Complex Systems. Sensors 2023, 23, 7819. [Google Scholar] [CrossRef]
- Xu, J.; Wang, Y.; Xu, L. PHM-Oriented Sensor Optimization Selection Based on Multiobjective Model for Aircraft Engines. IEEE Sensors J. 2015, 15, 4836–4844. [Google Scholar] [CrossRef]
- Farschman, C.A.; Viswanath, K.P.; Ydstie, B.E. Process systems and inventory control. AIChE J. 1998, 44, 1841–1857. [Google Scholar] [CrossRef]
- Clark, E.; Brunton, S.L.; Kutz, J.N. Multi-Fidelity Sensor Selection: Greedy Algorithms to Place Cheap and Expensive Sensors with Cost Constraints. IEEE Sens. J. 2021, 21, 600–611. [Google Scholar] [CrossRef]
- Civera, M.; Pecorelli, M.L.; Ceravolo, R.; Surace, C.; Fragonara, L.Z. A multi-objective genetic algorithm strategy for robust optimal sensor placement. Comput.-Aided Civ. Infrastruct. Eng. 2021, 36, 1185–1202. [Google Scholar] [CrossRef]
- Hare, J.; Gupta, S.; Najjar, N.; D’Orlando, P.; Walthall, R. System-Level Fault Diagnosis with Application to the Environmental Control System of an Aircraft. In Proceedings of the SAE 2015 AeroTech Congress & Exhibition, Seattle, WA, USA, 22–24 September 2015. SAE Technical Paper 2015-01-2583. [Google Scholar] [CrossRef]
- de Souza Mello, F.M.; Gomes, G.F. Sensor placement optimization for composite aircraft structures: A multi-objective Kriging-based approach. Compos. Struct. 2025, 353, 118723. [Google Scholar] [CrossRef]
- New Aircraft Cabin Environment Sensor Certified for Boeing 737-Avionics International. Available online: https://www.aviationtoday.com/2021/03/23/new-aircraft-cabin-environment-sensor-certified-boeing-737/ (accessed on 9 March 2025).
- Ezhilarasu, C.M.; Skaf, Z.; Jennions, I.K. A Generalised Methodology for the Diagnosis of Aircraft Systems. IEEE Access 2021, 9, 11437–11454. [Google Scholar] [CrossRef]
- Mao, L.; Davies, B.; Jackson, L. Application of the Sensor Selection Approach in Polymer Electrolyte Membrane Fuel Cell Prognostics and Health Management. Energies 2017, 10, 1511. [Google Scholar] [CrossRef]
- Lee, D.; Lee, I.; Kim, Y.; Joo, S.C.; Choi, J.H. Sensor set optimization by functional model and Bayesian network for fault diagnosis of turbine generator lubrication system. Eng. Appl. Artif. Intell. 2024, 138, 109416. [Google Scholar] [CrossRef]
- Planès, T.; Delbecq, S.; Pommier-Budinger, V.; Bénard, E. Modeling and Design Optimization of an Electric Environmental Control System for Commercial Passenger Aircraft. Aerospace 2023, 10, 260. [Google Scholar] [CrossRef]
- Liu, Q.; Zhuang, L.; Wen, J.; Dong, B.; Liu, Z. Thermodynamic Optimization of Aircraft Environmental Control System Using Modified Genetic Algorithm. Processes 2022, 10, 721. [Google Scholar] [CrossRef]
- House, J.M.; Seem, J.E. Systems and Methods for Fault Detection of Air Handling Units. U.S. Patent 8,239,168 B2, 7 August 2012. [Google Scholar]
- Shao, Q.; Kumagai, G.; Dong, B.; Kim, K.; Singhai, M. Pattern Classification System with Smart Data Collection for Environmental Control System Fault Isolation. EP 3 719 602 B1, 2 April 2020. [Google Scholar]
- Jennions, I.; Ali, F. Assessment of heat exchanger degradation in a boeing 737-800 environmental control system. J. Therm. Sci. Eng. Appl. 2021, 13, 061015. [Google Scholar] [CrossRef]
- B.Suslu-NDCI_Calculations. Available online: https://github.com/ssl8/ECS-sensor-optimisation/blob/4174e20aff3e1c189d72aa9c75fbd104a5c339c7/multiFaultComparison.m (accessed on 20 February 2025).
- B.Suslu-MOSOF_ECS_Case_Outlines. Available online: https://github.com/ssl8/ECS-sensor-optimisation/blob/0ce6ca4df91cb1fc3f2c98b2483d4b9b6caed0d9/NDCI_MOSOF_ECS.m (accessed on 22 February 2025).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Application Areas | Key Functions | Key Benefits | Examples | MOSOF: Sensor Selection | MOSOF: Sensor Placement | MOSOF: Data Processing | MOSOF: Sensor Operation |
|---|---|---|---|---|---|---|---|
| Diagnostics | Fault detection, predictive maintenance, calibration | Early fault identification, reduced downtime, system accuracy | Detecting machine wear, diagnosing system errors | Accuracy for fault detection, sensitivity to anomalies | Strategic positioning for fault-prone areas | Fault trend analysis, anomaly detection algorithms | Periodic calibration, low power consumption |
| Control | Automation, energy management, optimisation | Real-time adjustments, resource savings, enhanced performance | Optimising HVAC systems, adjusting power usage dynamically | Sensors capable of real-time adjustments | Placement for real-time feedback integration | Real-time control feedback loops, optimisation algorithms | Seamless integration with control systems |
| Monitoring and Reporting | Environmental compliance, data logging, user interfaces | Regulatory adherence, historical insights, user interaction | Logging air quality data, monitoring production trends | Sensors with wide environmental parameter ranges | Distributed placement for comprehensive monitoring | Data aggregation, compliance reports, and visualisation | Reliable operation under varying conditions |
| Safety and Security | Surveillance, access control, safety assurance | Improved security, system integrity, risk reduction | Securing restricted areas, detecting unauthorised entry | High-security sensors, tamper-proof capabilities | Coverage for all critical and high-risk areas | Event driven processing, security breach detection | Resilient operation in high-security environments |
| System and Process Optimisation | Efficiency improvement, operational reliability | Cost savings, process efficiency, stable operations | Streamlining production lines, reducing energy wastage | Energy- efficient, long-lasting, and multi-functional sensors | Optimised placement for process and energy efficiency | Efficiency metrics, operational insights, optimisation models | Sustained performance under demanding conditions |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suslu, B.; Ali, F.; Jennions, I.K. Normalised Diagnostic Contribution Index (NDCI) Integration to Multi Objective Sensor Optimisation Framework (MOSOF)—An Environmental Control System Case. Sensors 2025, 25, 2661. https://doi.org/10.3390/s25092661
Suslu B, Ali F, Jennions IK. Normalised Diagnostic Contribution Index (NDCI) Integration to Multi Objective Sensor Optimisation Framework (MOSOF)—An Environmental Control System Case. Sensors. 2025; 25(9):2661. https://doi.org/10.3390/s25092661
Chicago/Turabian StyleSuslu, Burak, Fakhre Ali, and Ian K. Jennions. 2025. "Normalised Diagnostic Contribution Index (NDCI) Integration to Multi Objective Sensor Optimisation Framework (MOSOF)—An Environmental Control System Case" Sensors 25, no. 9: 2661. https://doi.org/10.3390/s25092661
APA StyleSuslu, B., Ali, F., & Jennions, I. K. (2025). Normalised Diagnostic Contribution Index (NDCI) Integration to Multi Objective Sensor Optimisation Framework (MOSOF)—An Environmental Control System Case. Sensors, 25(9), 2661. https://doi.org/10.3390/s25092661