
FRRT*-Connect: A Bidirectional Sampling-Based Path Planner with Potential Field Guidance for Complex Obstacle Environments



Abstract
1. Introduction
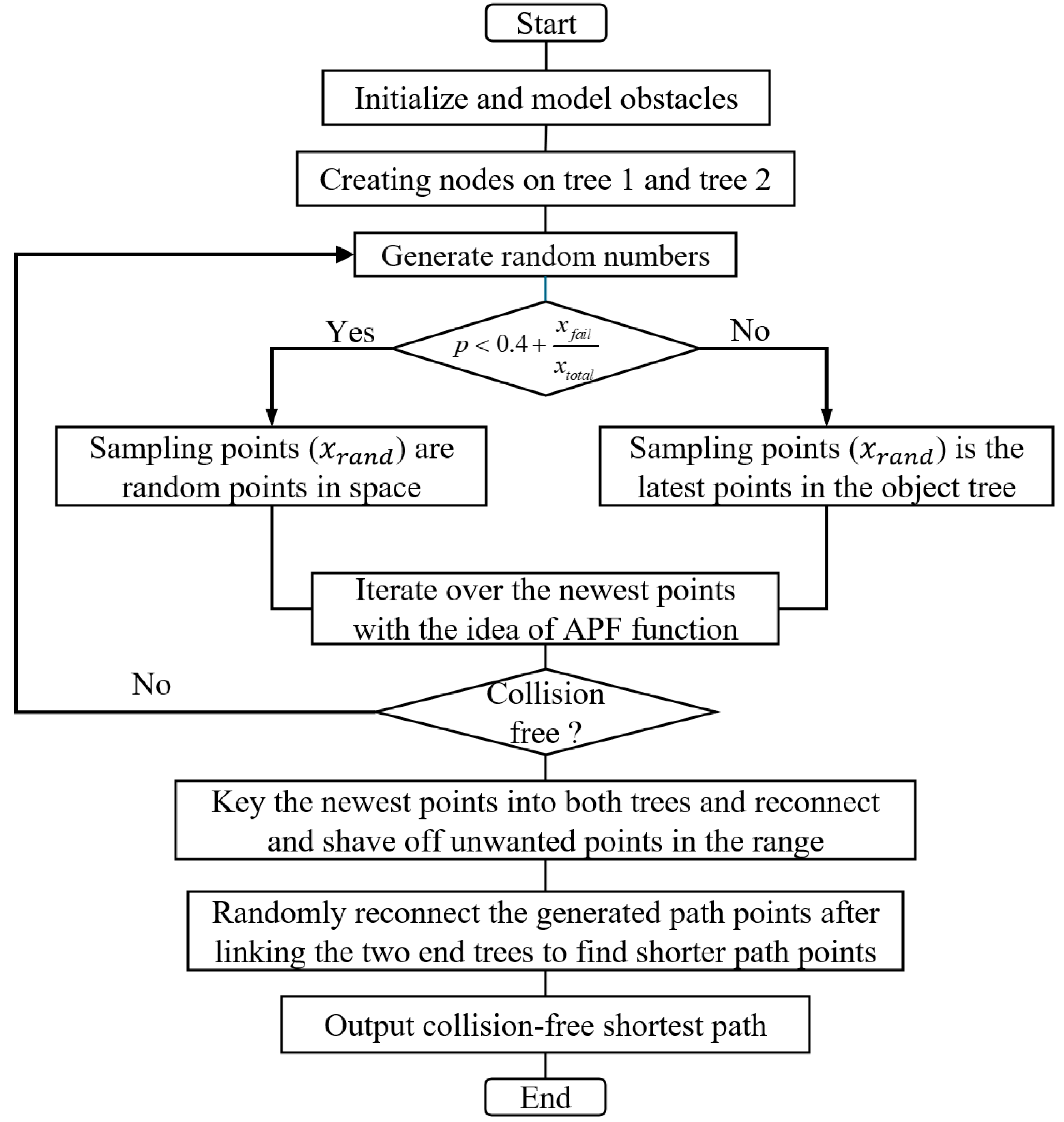
- Gradient-aware sampling: introduces a probability parameter random Equation (1) to bias random sampling towards the goal tree, reducing ineffective sampling by 42.3% compared to traditional RRT*-Connect.
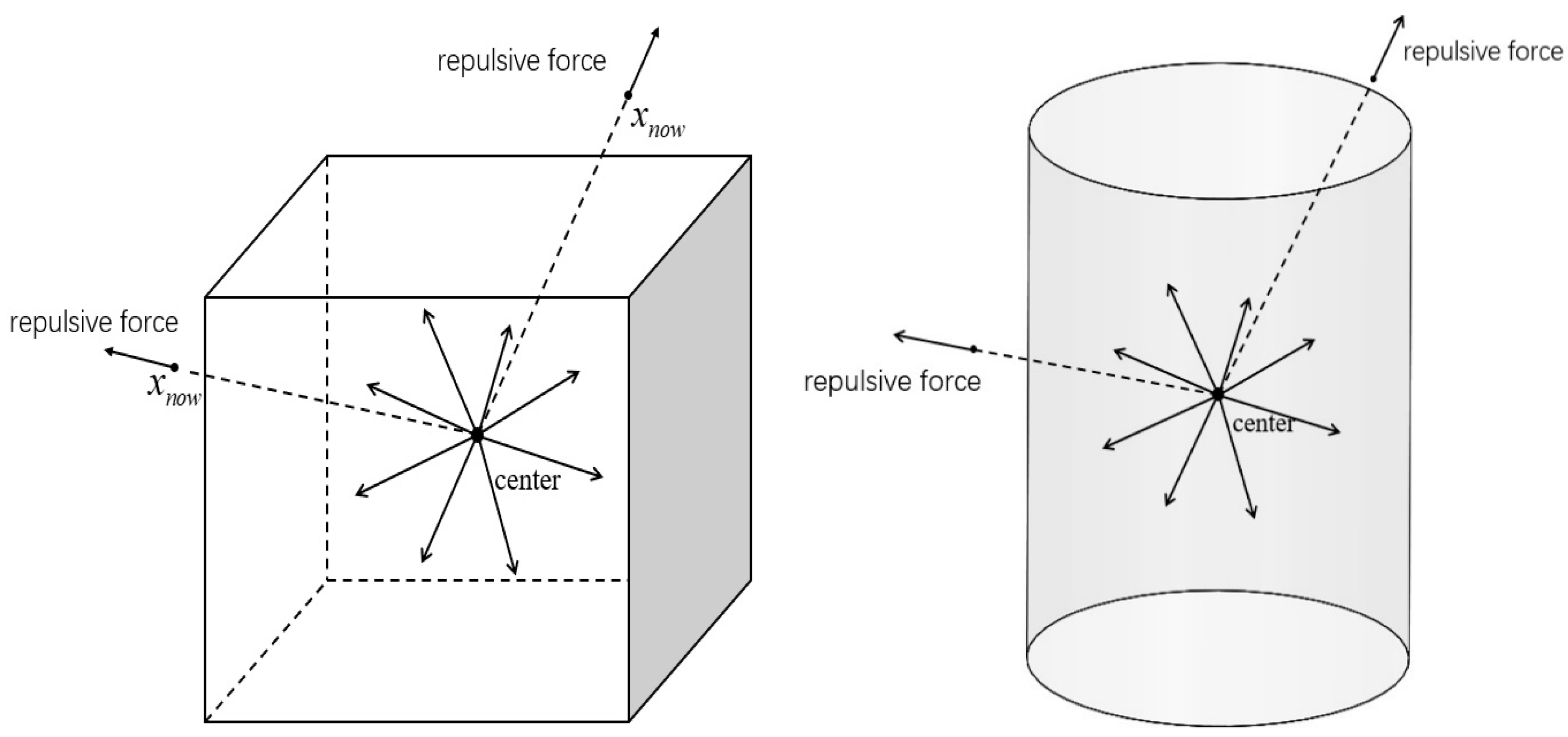
- Pseudo-distance obstacle modeling: adopts the pseudo-distance concept from Wu et al. [16] to construct super-quadric envelopes for cylindrical and cuboidal obstacles, enabling precise collision avoidance in 3D spaces (Section 4.2).
- Dynamic step adaptation: implements a segmented collision-checking mechanism (Section 4.4) that divides each path segment into 1000 intervals, effectively preventing local minima while maintaining asymptotic optimality.
2. Related Work
2.1. Sampling Algorithms
2.2. End Effector Trajectory Planning
2.3. FRRT*-Connect Algorithms
3. Tree Iteration and Sampling
3.1. Sampling Function
3.2. Application of the Gravitational Function
4. Obstacle Avoidance
4.1. Application of the Repulsion Function
4.2. Obstacle Establishment
4.3. Selection of Attractive and Repulsive Coefficients
4.4. Collision Detection
4.5. Latest Point Selection and Post-Iteration Optimization
5. Analysis of the FRRT*-Connect Algorithm
5.1. Probabilistic Completeness
5.2. Asymptotic Optimality
5.3. Time Complexity
6. Algorithm Testing and Simulation
6.1. Test Analysis
6.2. Algorithm Simulation
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bruno, S.; Khatib, O.; Kröger, T. (Eds.) Springer Handbook of Robotics; Springer: Berlin, Germany, 2008; Volume 200. [Google Scholar]
- Craig, J.J. Introduction to Robotics; Pearson Education, Inc.: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- Steven, M.L. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Kuffner, J.J.; Steven, M.L. RRT-connect: An efficient approach to single-query path planning. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2000; IEEE: Piscataway, NJ, USA, 2000; Volume 2. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. In Edsger Wybe Dijkstra: His Life, Work, and Legacy; Association for Computing Machinery: New York, NY, USA, 2022; pp. 287–290. [Google Scholar]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization, and Machine Learning; Addison-Wesley: Reading, MA, USA, 1989; Volume 3. [Google Scholar]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- Gammell, J.D.; Srinivasa, S.S.; Barfoot, T.D. Batch informed trees (BIT*): Sampling-based optimal planning via the heuristically guided search of implicit random geometric graphs. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Liu, J.; Yap, H.J.; Khairuddin, A.S.M. Path Planning for the Robotic Manipulator in Dynamic Environments Based on a Deep Reinforcement Learning Method. J. Intell. Robot. Syst. 2025, 111, 3. [Google Scholar] [CrossRef]
- Chiang, H.-T.L.; Hsu, J.; Fiser, M.; Tapia, L.; Faust, A. RL-RRT: Kinodynamic motion planning via learning reachability estimators from RL policies. IEEE Robot. Autom. Lett. 2019, 4, 4298–4305. [Google Scholar] [CrossRef]
- Zhao, H.; Guo, Y.; Liu, Y.; Jin, J. Multirobot unknown environment exploration and obstacle avoidance based on a Voronoi diagram and reinforcement learning. Expert Syst. Appl. 2025, 264, 125900. [Google Scholar] [CrossRef]
- Kun, W.; Ren, B. A method on dynamic path planning for robotic manipulator autonomous obstacle avoidance based on an improved RRT algorithm. Sensors 2018, 18, 571. [Google Scholar] [CrossRef] [PubMed]
- Jiang, L.; Liu, S.; Cui, Y.; Jiang, H. Path planning for robotic manipulator in complex multi-obstacle environment based on improved_RRT. IEEE/ASME Trans. Mechatron. 2022, 27, 4774–4785. [Google Scholar] [CrossRef]
- Wu, X.; Zhang, L.; Lee, Y. A Novel Pseudo-Distance Concept for Path Planning in Complex Environments. IEEE Trans. Robot. 2019, 35, 789–800. [Google Scholar] [CrossRef]
- Ichter, B.; Harrison, J.; Pavone, M. Learning sampling distributions for robot motion planning. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Zhang, Z.; Qiao, B.; Zhao, W.; Chen, X. A predictive path planning algorithm for mobile robot in dynamic environments based on rapidly exploring random tree. Arab. J. Sci. Eng. 2021, 46, 8223–8232. [Google Scholar] [CrossRef]
- Petrović, L. Motion planning in high-dimensional spaces. arXiv 2018, arXiv:1806.07457. [Google Scholar]
- LaValle, S.M.; Kuffner Jr, J.J. Randomized kinodynamic planning. Int. J. Robot. Res. 2001, 20, 378–400. [Google Scholar] [CrossRef]
- Paden, B.; Čáp, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A survey of motion planning and control techniques for self-driving urban vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef]
- Qureshi, A.H.; Mumtaz, S.; Iqbal, K.F.; Ali, B.; Ayaz, Y.; Ahmed, F.; Muhammad, M.S.; Hasan, O.; Kim, W.Y.; Ra, M. Adaptive Potential guided directional-RRT. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar]
- Karaman, S.; Frazzoli, E. Incremental sampling-based algorithms for optimal motion planning. Robot. Sci. Syst. VI 2011, 104, 267–274. [Google Scholar]
- Smith, J.; Johnson, A. Improving Artificial Potential Fields for Complex Environments: A New Approach. J. Robot. Autom. 2020, 36, 567–580. [Google Scholar] [CrossRef]
- Sepehri, A.; Moghaddam, A.M. A motion planning algorithm for redundant manipulators using rapidly exploring randomized trees and artificial potential fields. IEEE Access 2021, 9, 26059–26070. [Google Scholar] [CrossRef]
- Zhang, J.; Tansu, N. Optical gain and laser characteristics of InGaN quantum wells on ternary InGaN substrates. IEEE Photon. J. 2013, 5, 2600111. [Google Scholar] [CrossRef]
- Klemm, S.; Oberländer, J.; Hermann, A.; Roennau, A.; Schamm, T.; Zollner, J.M.; Dillmann, R. RRT*-Connect: Faster, asymptotically optimal motion planning. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Gammell, J.D.; Srinivasa, S.S.; Barfoot, T.D. Informed-RRT*: Optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar]
- Wang, X.; Wei, J.; Zhou, X.; Xia, Z.; Gu, X. AEB-RRT*: An adaptive extension bidirectional RRT* algorithm. Auton. Robot. 2022, 46, 685–704. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance (m) | 0–346 | 346–692 | 692–1039 | 1039–1385 | 1385–1732 |
|---|---|---|---|---|---|
| 1211 | 2431 | 3651 | 4881 | 6101 |
| Algorithm | rrt (s) | rrt*-Connect (s) | Informed-rrt* (s) | Aeb-rrt* (s) | APF (s) | Frrt*-Connect (s) |
|---|---|---|---|---|---|---|
| Map1 | 47.5 | 40.9 | 2.01 | 1.79 | 0.89 | 1.49 |
| Map2 | 86.3 | 52 | 2.95 | 1.78 | 0.68 | 1.243 |
| Map3 | 111 | 37.9 | 4.79 | 2.75 | 0.86 | 1.5596 |
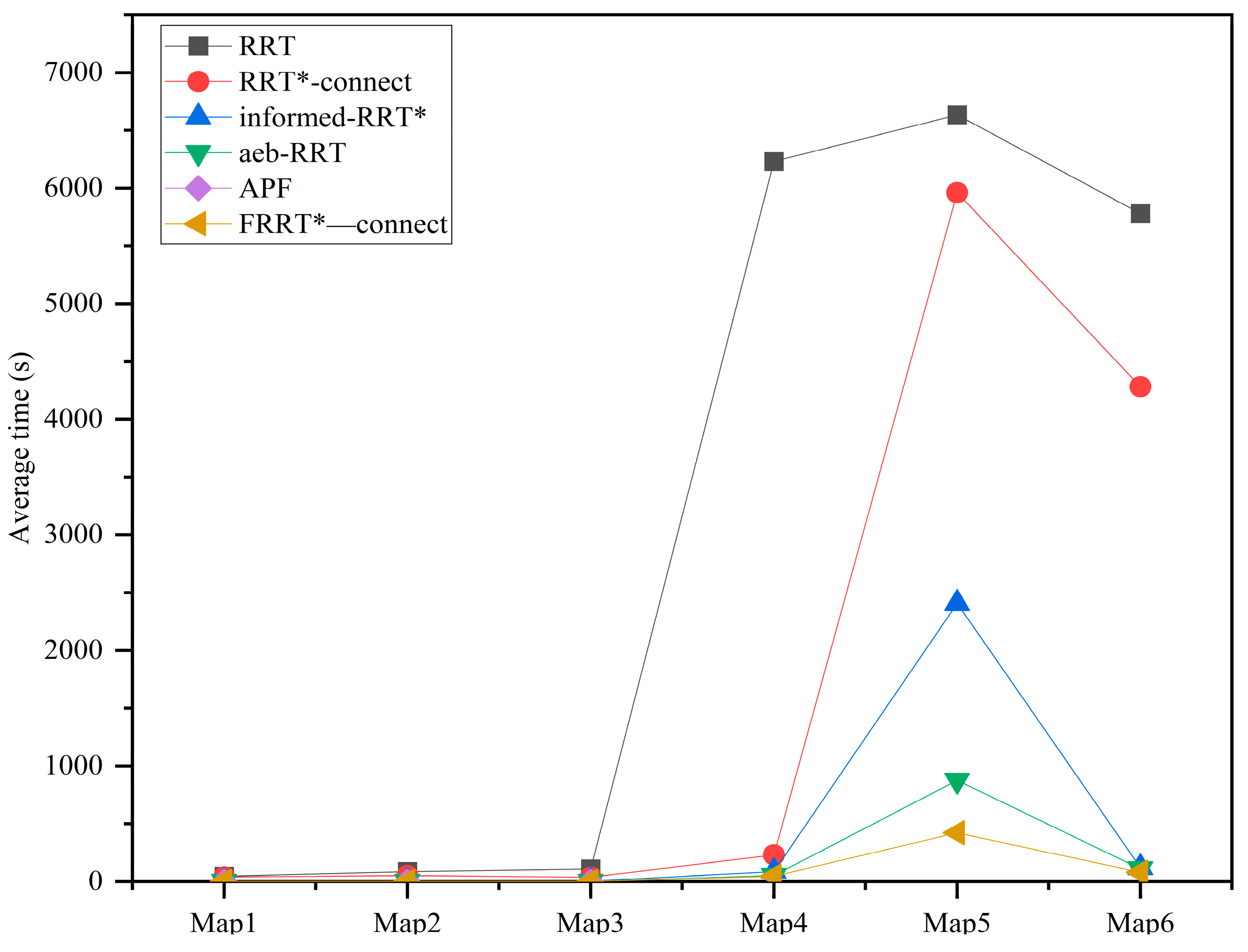
| Map4 | 6231 | 231 | 86.7 | 52.7 | - | 45.7 |
| Map5 | 6634 | 5962 | 2406 | 876 | - | 422.8 |
| Map6 | 5782 | 4283 | 120.86 | 110.6 | - | 81.07 |
| Algorithm | rrt | rrt*-Connect | Informed-rrt* | Aeb-rrt* | APF | Frrt*-Connect |
|---|---|---|---|---|---|---|
| Map1 | 0 | 0 | 0 | 0 | 0 | 0 |
| Map2 | 0 | 0 | 0 | 0 | 0 | 0 |
| Map3 | 2% | 0 | 0 | 0 | 0 | 0 |
| Map4 | 46% | 24% | 42% | 0 | 100% | 0 |
| Map5 | 56% | 46% | 18% | 0 | 100% | 0 |
| Map6 | 62% | 56% | 12% | 2% | 100% | 2% |
| 1 | −0.1284 | 0 | ||
| 2 | −0.0064 | 0 | ||
| 3 | −0.2104 | 0 | ||
| 4 | −0.0064 | 0 | ||
| 5 | −0.1059 | 0 | ||
| 6 | 0 | 0 | ||
| 7 | −0.0615 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, W.; Xu, X.; Rodić, A.; Petrovich, P.B. FRRT*-Connect: A Bidirectional Sampling-Based Path Planner with Potential Field Guidance for Complex Obstacle Environments. Sensors 2025, 25, 2761. https://doi.org/10.3390/s25092761
Yan W, Xu X, Rodić A, Petrovich PB. FRRT*-Connect: A Bidirectional Sampling-Based Path Planner with Potential Field Guidance for Complex Obstacle Environments. Sensors. 2025; 25(9):2761. https://doi.org/10.3390/s25092761
Chicago/Turabian StyleYan, Wenshan, Xiangrong Xu, Aleksandar Rodić, and Petar B. Petrovich. 2025. "FRRT*-Connect: A Bidirectional Sampling-Based Path Planner with Potential Field Guidance for Complex Obstacle Environments" Sensors 25, no. 9: 2761. https://doi.org/10.3390/s25092761
APA StyleYan, W., Xu, X., Rodić, A., & Petrovich, P. B. (2025). FRRT*-Connect: A Bidirectional Sampling-Based Path Planner with Potential Field Guidance for Complex Obstacle Environments. Sensors, 25(9), 2761. https://doi.org/10.3390/s25092761