
Autonomous IoT Monitoring Matching Spectral Artificial Light Manipulation for Horticulture

 ,
,  , , , , and
, , , , and 
Abstract
:1. Introduction
2. Artificial Lighting in Horticulture
3. Greenhouse Monitoring
4. Materials and Methods
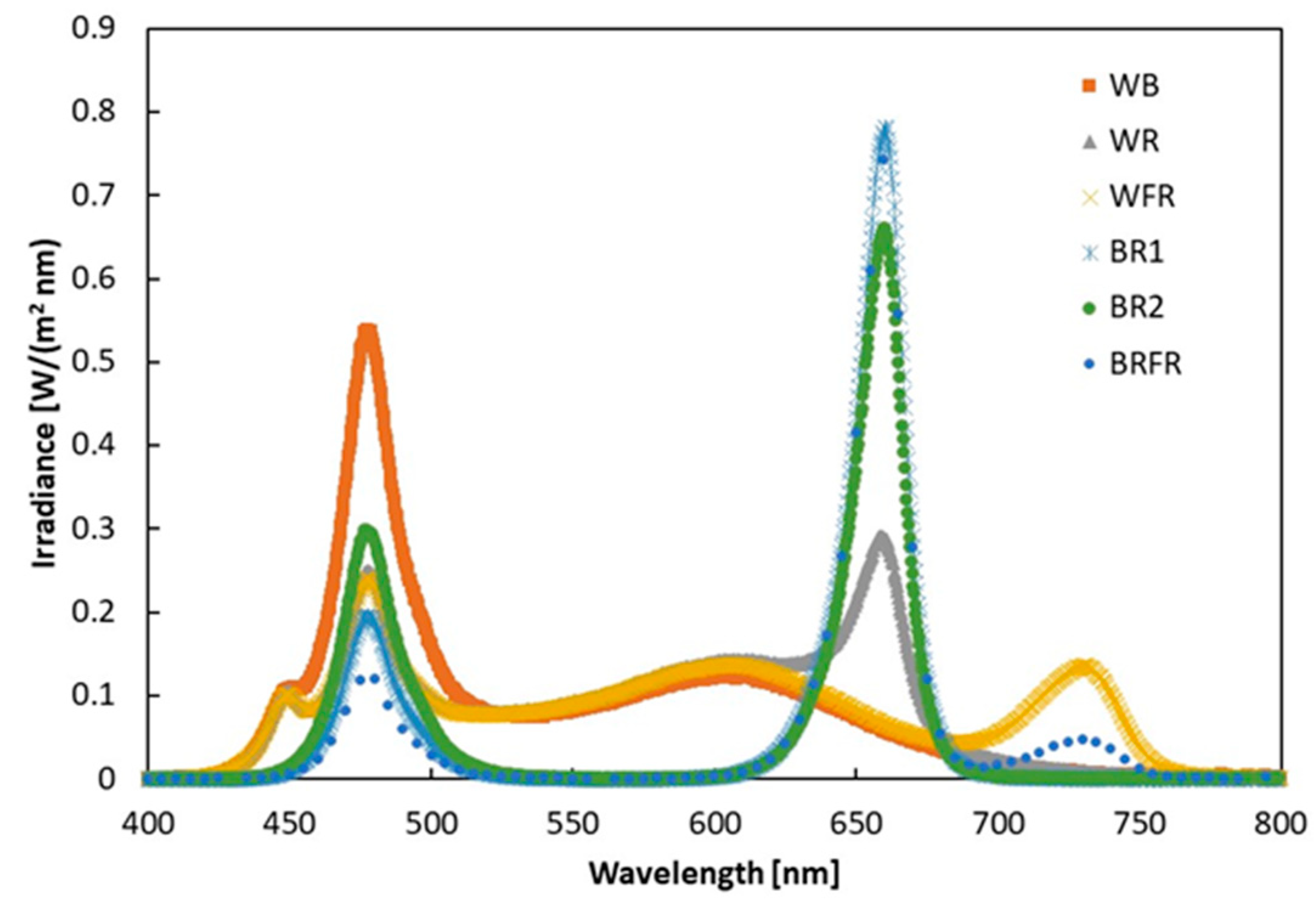
4.1. Light Sources
4.2. PV Module Characterization
4.3. Node Tests
4.4. Light Treatments
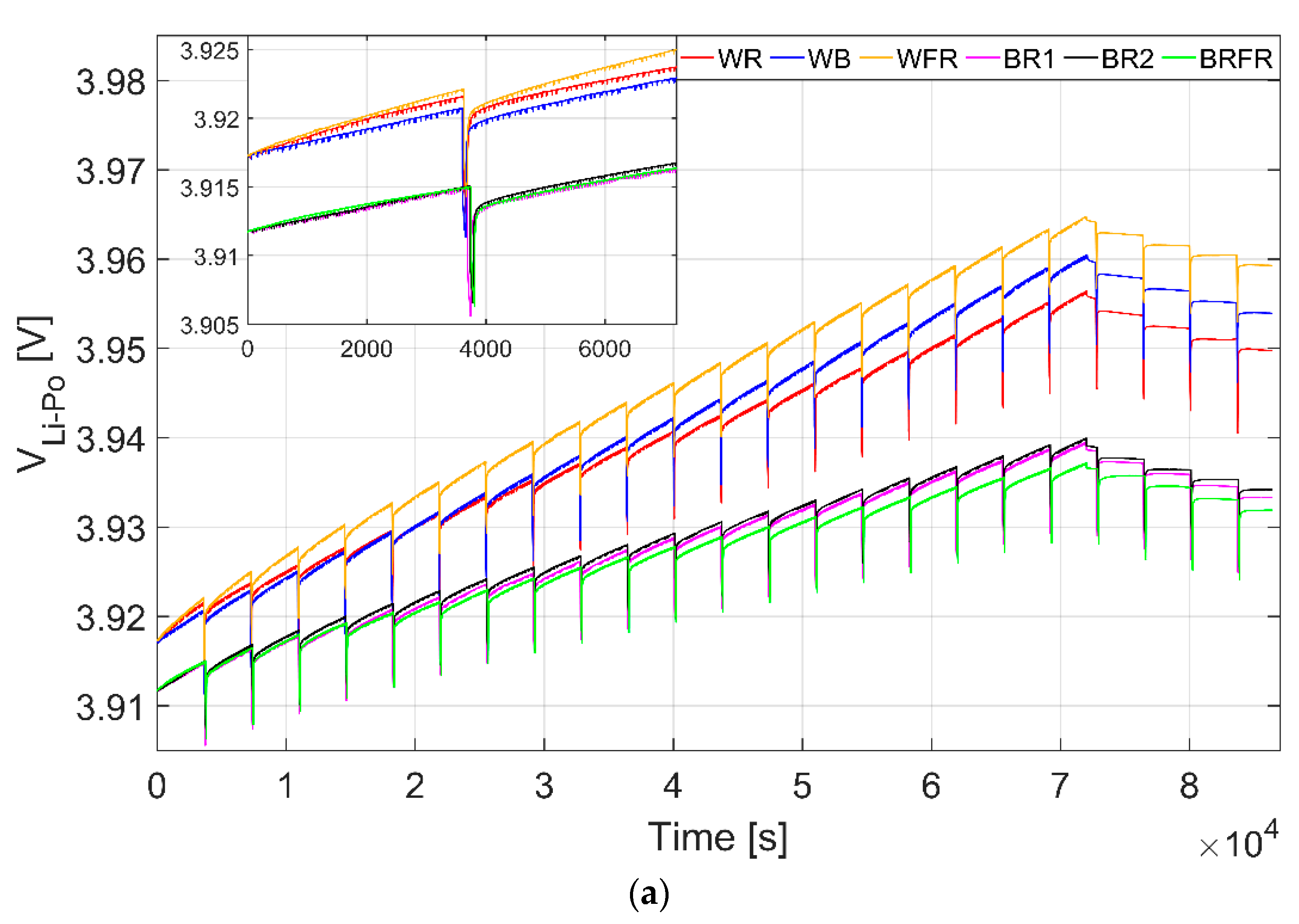
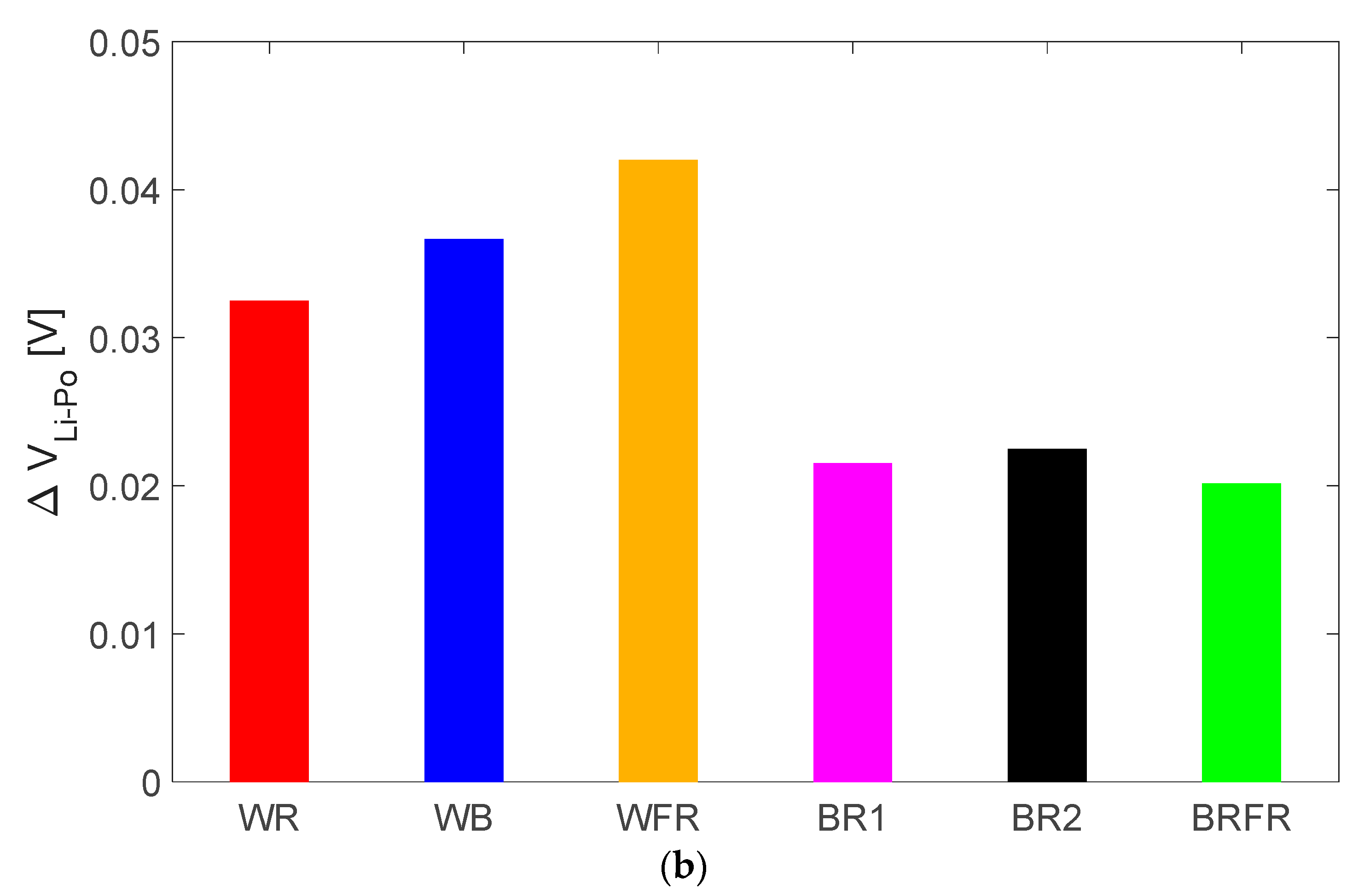
- WB: 117 µmol/m2 s of white 5700 K and 38 µmol/m2 s of blue (corresponding, respectively, to 75% and 25% relative intensities);
- WR: 117 µmol/m2 s of white 5700 K and 38 µmol/m2 s of red (corresponding, respectively, to 75% and 25% relative intensities);
- WFR: 117 µmol/m2 s of white 5700 K and 38 µmol/m2 s of far-red (corresponding, respectively, to 75% and 25% relative intensities).
- BRFR: 17 µmol/m2 s of blue, 112 µmol/m2 s of red, 16 µmol/m2 s of far-red (corresponding, respectively, to 11%, 79% and 10% relative intensities);
- BR1: 25 µmol/m2 s of blue, 130 µmol/m2 s of red (corresponding, respectively, to 16% and 84% relative intensities);
- BR2: 38 µmol/m2 s of blue, 117 µmol/m2 s of red (corresponding, respectively, to 25% and 75% relative intensities).
5. Node Architecture
5.1. The PV Module
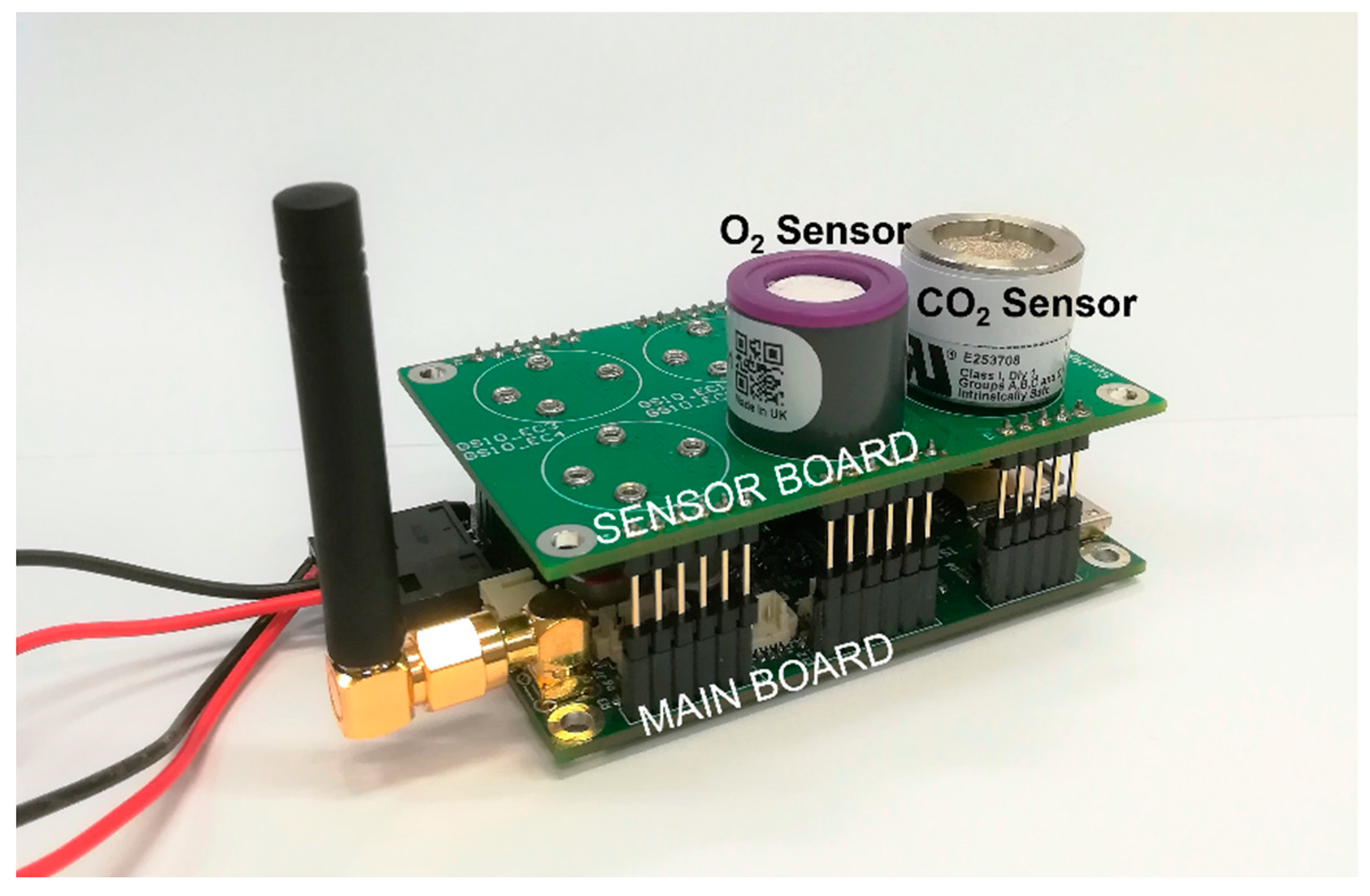
5.2. The Sensor Board
5.3. The Main Board
5.4. Node Operations
6. Experimental Results
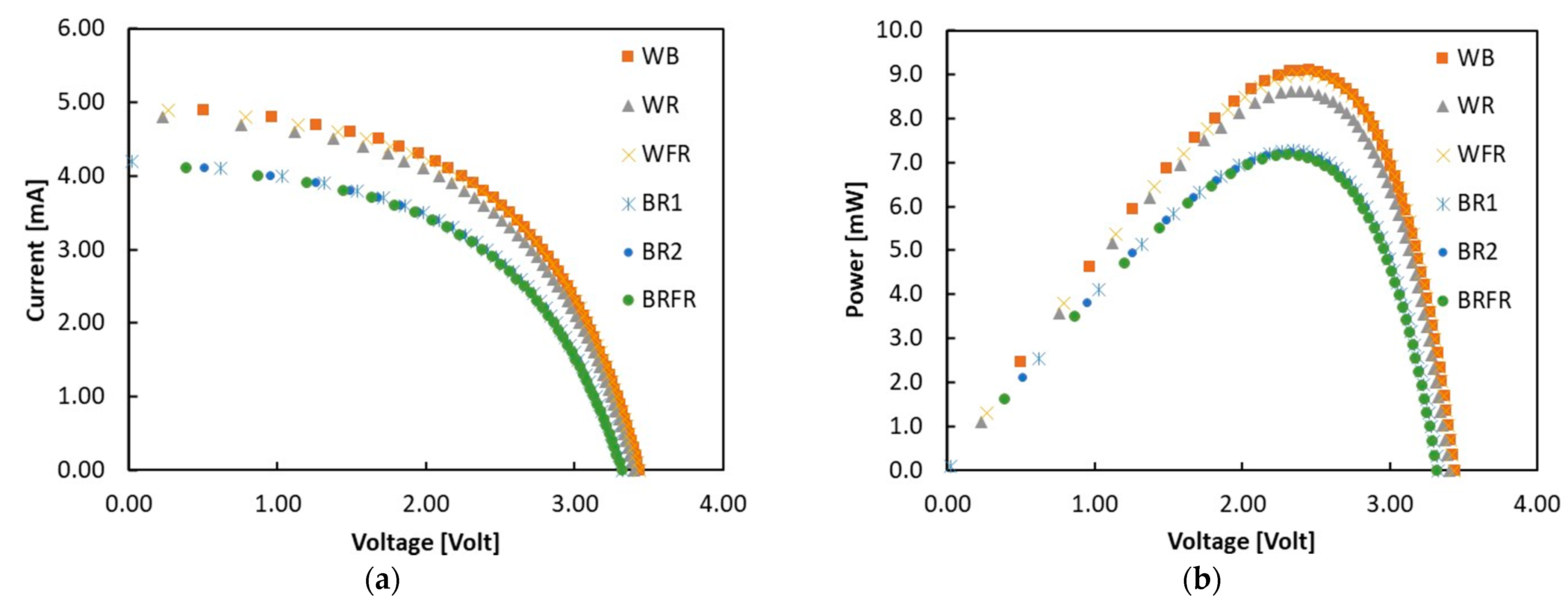
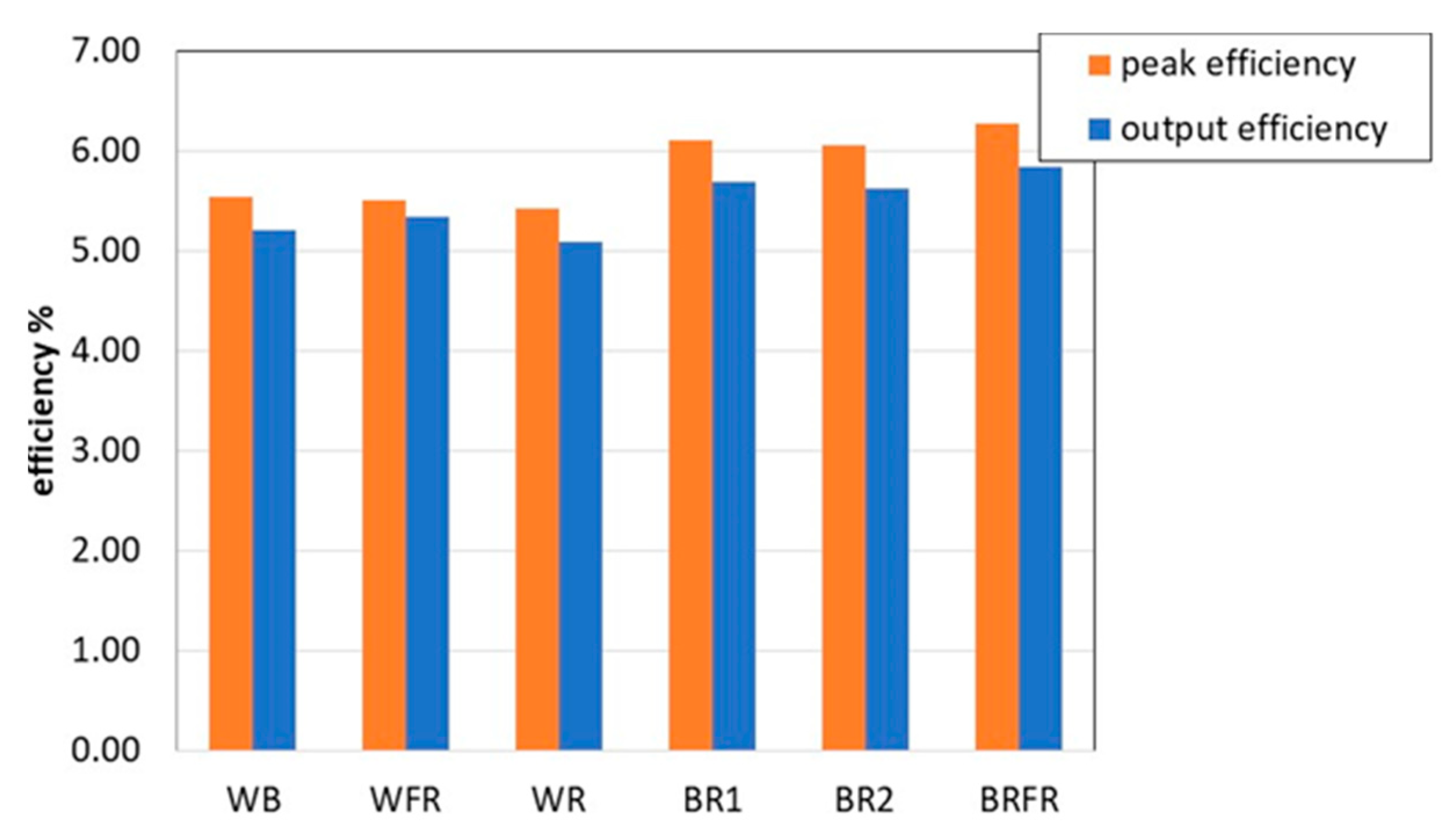
6.1. Solar Cell Characterization
6.2. Node Tests
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tuna, G.; Gungor, V.C. Energy harvesting and battery technologies for powering wireless sensor networks. In Industrial Wireless Sensor Networks; Kolavennu, S., Ed.; Woodhead Publishing: Sawston, UK, 2016; pp. 25–38. [Google Scholar]
- Adu-Manu, K.S.; Adam, N.; Tapparello, C.; Ayatollahi, H.; Heinzelman, W. Energy-harvesting wireless sensor networks (EH-WSNs): A review. ACM Trans. Sens. Netw. 2018, 14, 1–50. [Google Scholar] [CrossRef]
- Wang, W.S.; O’Donnell, T.; Wang, N.; Hayes, M.; O’Flynn, B.; O’Mathuna, C. Design considerations of sub-mW indoor light energy harvesting for wireless sensor systems. ACM J. Emerg. Technol. Comput. Syst. 2008, 6, 1–26. [Google Scholar] [CrossRef]
- Demotes-Mainarda, S.; Peron, T.; Corot, A.; Bertheloot, J.; Le Gourrierec, J.; Pelleschi-Travier, S.; Crespel, L.; Morel, P.; Huche-Thelier, L.; Boumaz, R.; et al. Plant responses to red and far-red lights, applications in horticulture. Environ. Exp. Bot. 2016, 121, 4–21. [Google Scholar] [CrossRef]
- Pozzebon, A.; Cappelli, I.; Mecocci, A.; Bertoni, D.; Sarti, G.; Alquini, F. A wireless sensor network for the real-time remote measurement of aeolian sand transport on sandy beaches and dunes. Sensors 2018, 18, 820. [Google Scholar] [CrossRef] [Green Version]
- Addabbo, T.; Fort, A.; Mugnaini, M.; Parri, L.; Parrino, S.; Pozzebon, A.; Vignoli, V. An IoT framework for the pervasive monitoring of chemical emissions in industrial plants. In Proceedings of the 2018 Workshop on Metrology for Industry 4.0 and IoT, Brescia, Italy, 16–18 April 2018; pp. 269–273. [Google Scholar]
- Rizzi, M.; Ferrari, P.; Flammini, A.; Sisinni, E. Evaluation of the IoT LoRaWAN solution for distributed measurement applications. IEEE Trans. Instrum. Meas. 2017, 66, 3340–3349. [Google Scholar] [CrossRef]
- Addabbo, T.; Fort, A.; Mugnaini, M.; Parri, L.; Pozzebon, A.; Vignoli, V. Smart sensing in mobility: A LoRaWAN architecture for pervasive environmental monitoring. In Proceedings of the 2019 IEEE 5th International forum on Research and Technology for Society and Industry (RTSI), Florence, Italy, 9–12 September 2019; pp. 421–426. [Google Scholar]
- Carrasquilla-Batista, A.; Chacon-Rodriguez, A.; Solorzano-Quintana, M. Using IoT resources to enhance the accuracy of overdrain measurements in greenhouse horticulture. In Proceedings of the 2016 IEEE 36th Central American and Panama Convention (CONCAPAN XXXVI), San Jose, Costa Rica, 9–11 November 2016; pp. 1–5. [Google Scholar]
- Peruzzi, G.; Pozzebon, A. A Review of Energy Harvesting Techniques for Low Power Wide Area Networks (LPWANs). Energies 2020, 13, 3433. [Google Scholar] [CrossRef]
- Solar Spectra. Available online: https://rredc.nrel.gov/solar/spectra/am1.5 (accessed on 25 April 2021).
- Mccree, K.J. The action spectrum, absorbance and quantum yield of photosynthesisin cropplants. Agric. Meteorol. 1972, 9, 191–216. [Google Scholar] [CrossRef]
- Sager, J.C.; McFarlane, J.C. Radiation. In Plant Growth Chamber Handbook, Iowa Agriculture and Home Economics Experiment Station Special Report No. 99, North Central Regional Research Publication No. 340; Langhans, R.W., Tibbitts, T.W., Eds.; NC-101 Regional Committee on Controlled Environment Technology and Use: Ames, IA, USA, 1997; Volume 46, pp. 1–30. [Google Scholar]
- Rahman, M.M.; Vasiliev, M.; Alameh, K. LED Illumination spectrum manipulation for increasing the yield of sweet basil (Ocimum basilicum L.). Plants 2021, 10, 344. [Google Scholar] [CrossRef]
- Jones, M.A. Using light to improve commercial value. Hortic. Res. 2018, 5, 47. [Google Scholar] [CrossRef] [Green Version]
- Lee, M.; Xu, J.; Wang, W.; Rajashekar, C.B. The Effect of Supplemental Blue, Red and Far-Red Light on the Growth and the Nutritional Quality of Red and Green Leaf Lettuce. Am. J. Plant Sci. 2019, 10, 2219–2235. [Google Scholar] [CrossRef] [Green Version]
- Galvao, V.C.; Fankhauser, C. Sensing the light environment in plants: Photoreceptors and early signaling steps. Curr. Opin. Neurobiol. 2015, 34, 46–53. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.; Folta, K.M. Contributions of green light to plant growth and development. Am. J. Bot. 2013, 100, 70–78. [Google Scholar] [CrossRef] [PubMed]
- Paucek, I.; Pennisi, G.; Pistillo, A.; Appolloni, E.; Crepaldi, A.; Calegari, B.; Calegari, B.; Spinelli, F.; Cellini, A.; Gabarrell, X.; et al. Supplementary LED interlighting improves yield and precocity of greenhouse tomatoes in the Mediterranean. Agronomy 2020, 10, 1002. [Google Scholar] [CrossRef]
- Pennisi, G.; Orsini, F.; Blasioli, S.; Cellini, A.; Crepaldi, A.; Braschi, I.; Spinelli, F.; Nicola, S.; Fernandez, J.A.; Stanghellini, C.; et al. Resource use efficiency of indoor lettuce (Lactuca sativa L.) cultivation as affected by red: Blue ratio provided by LED lighting. Sci. Rep. 2019, 9, 14127. [Google Scholar] [CrossRef] [PubMed]
- Pennisi, G.; Pistillo, A.; Orsini, F.; Cellini, A.; Spinelli, F.; Nicola, S.; Fernandez, J.A.; Crepaldi, A.; Gianquinto, G.; Marcelis, L.F. Optimal light intensity for sustainable water and energy use in indoor cultivation of lettuce and basil under red and blue LEDs. Sci. Hortic. 2020, 272, 109508. [Google Scholar] [CrossRef]
- Johkan, M.; Shoji, K.; Goto, F.; Hashida, S.N.; Yoshihara, T. Blue light-emitting diode light irradiation of seedlings improves seedling quality and growth after transplanting in red leaf lettuce. HortScience 2010, 45, 1809–1814. [Google Scholar] [CrossRef] [Green Version]
- Farooq, M.S.; Riaz, S.; Abid, A.; Abid, K.; Naeem, M.A. A Survey on the Role of IoT in Agriculture for the Implementation of Smart Farming. IEEE Access 2019, 7, 156237–156271. [Google Scholar] [CrossRef]
- Shamshiri, R.; Kalantari, F.; Ting, K.C.; Thorp, K.R.; Hameed, I.A.; Weltzien, C.; Ahmad, D.; Shad, Z.M. Advances in greenhouse automation and controlled environment agriculture: A transition to plant factories and urban agriculture. Int. J. Agric. Biol. Eng. 2018, 11, 1–22. [Google Scholar] [CrossRef]
- Antony, A.P.; Leith, K.; Jolley, C.; Lu, J.; Sweeney, D.J. A review of practice and implementation of the Internet of Things (IoT) for smallholder agriculture. Sustainability 2020, 12, 3750. [Google Scholar] [CrossRef]
- Rayhana, R.; Xiao, G.; Liu, Z. Internet of Things Empowered Smart Greenhouse Farming. IEEE J. Radio Freq. Identif. 2020, 4, 195–211. [Google Scholar] [CrossRef]
- Liu, H.; Meng, Z.; Cui, S. A Wireless Sensor Network Prototype for Environmental Monitoring in Greenhouses. In Proceedings of the 2007 International Conference on Wireless Communications, Networking and Mobile Computing, Shanghai, China, 21–25 September 2007; pp. 2344–2347. [Google Scholar]
- Ahonen, T.; Virrankoski, R.; Elmusrati, M. Greenhouse Monitoring with Wireless Sensor Network. In Proceedings of the 2008 IEEE/ASME International Conference on Mechtronic and Embedded Systems and Applications, Beijing, China, 12–15 October 2008; pp. 403–408. [Google Scholar]
- Laura, S.B.; Sumalan, R. Plant growth and development monitoring through integrated sensor systems. J. Hortic. For. Biotechnol. 2013, 17, 307–311. [Google Scholar]
- Ting, L.; Man, Z.; Yuhan, J.; Sha, S.; Yiqiong, J.; Minzan, L. Management of CO2 in a tomato greenhouse using WSN and BPNN techniques. Int. J. Agric. Biol. Eng. 2015, 8, 43–51. [Google Scholar]
- Ferentinos, K.P.; Katsoulas, N.; Tzounis, A.; Bartzanas, T.; Kittas, C. Wireless sensor networks for greenhouse climate and plant condition assessment. Biosyst. Eng. 2017, 153, 70–81. [Google Scholar] [CrossRef]
- Rennane, A.; Benmahmoud, F.; Cherif, A.T.; Touhami, R.; Tedjini, S. Design of Autonomous Multi-Sensing Passive UHF RFID tag for Greenhouse Monitoring. Sens. Actuators A Phys. 2021, 331, 112922. [Google Scholar] [CrossRef]
- Khan, S.; Hussain, M.M. IoT enabled plant sensing systems for small and large scale automated horticultural monitoring. In Proceedings of the 2019 IEEE 5th World Forum on Internet of Things (WF-IoT), Limerick, Ireland, 15–18 April 2019; pp. 303–308. [Google Scholar]
- Wu, J.; Tang, X.; Lei, J. Design of wireless monitoring system for greenhouse based on LoRa. J. Phys. Conf. Ser. 2020, 1650, 022075. [Google Scholar] [CrossRef]
- Arshad, J.; Tariq, R.; Saleem, S.; Rehman, A.U.; Munir, H.; Amiri Golilarz, N.; Saleem, A. Intelligent greenhouse monitoring and control scheme: An arrangement of Sensors Raspberry Pi based Embedded System and IoT platform. Indian J. Sci. Technol. 2020, 13, 2811–2822. [Google Scholar] [CrossRef]
- Cappelli, I.; Fort, A.; Mugnaini, M.; Panzardi, E.; Pozzebon, A.; Tani, M.; Vignoli, V. Battery-less HF RFID sensor tag for humidity measurements based on TiO2 nanoparticles. In Proceedings of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Virtual, 25–29 May 2020; pp. 1–6. [Google Scholar]
- Bruzzi, M.; Cappelli, I.; Fort, A.; Pozzebon, A.; Tani, M.; Vignoli, V. Polycrystalline silicon photovoltaic harvesting for indoor IoT systems under red-far red artificial light. In Proceedings of the 2021 IEEE Sensors Applications Symposium (SAS), Virtual, 23–25 August 2021; pp. 1–6. [Google Scholar]
- Texas Instruments, bq25570 Nano Power Boost Charger and Buck Converter for Energy Harvester Powered Applications Datasheet. Available online: https://www.ti.com/lit/ds/symlink/bq25570.pdf (accessed on 18 May 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| WB | WR | WFR | BRFR | BR1 | BR2 | |
|---|---|---|---|---|---|---|
| Pinc [W/m2] | 33.00 | 32.00 | 33.00 | 23.00 | 24.00 | 24.00 |
| ISC [mA] | 5.00 | 5.00 | 5.00 | 4.20 | 4.30 | 4.30 |
| VOC [V] | 3.44 | 3.40 | 3.44 | 3.32 | 3.33 | 3.33 |
| VMAX [V] | 2.46 | 2.33 | 2.44 | 2.31 | 2.35 | 2.33 |
| VMAX/VOC % | 72.00 | 68.00 | 71.00 | 70.00 | 71.00 | 70.00 |
| PMAX [mW] | 9.09 | 8.62 | 9.02 | 7.16 | 7.27 | 7.22 |
| FF % | 53.00 | 52.00 | 53.00 | 52.00 | 51.00 | 52.00 |
| Efficiencymax % | 5.55 | 5.43 | 5.51 | 6.28 | 6.11 | 6.07 |
| WB | WR | WFR | BRFR | BR1 | BR2 | |
|---|---|---|---|---|---|---|
| Pinc [mW/m2] | 3.30 | 3.20 | 3.30 | 2.30 | 2.40 | 2.40 |
| VOC [V] | 3.44 | 3.40 | 3.44 | 3.32 | 3.33 | 3.33 |
| VMAX [V] | 2.46 | 2.33 | 2.44 | 2.31 | 2.35 | 2.33 |
| VOP [V] | 2.75 | 2.72 | 2.75 | 2.66 | 2.66 | 2.66 |
| PMAX [mW] | 9.09 | 8.62 | 9.02 | 7.16 | 7.27 | 7.22 |
| POP [mW] | 8.53 | 8.08 | 8.75 | 6.66 | 6.79 | 6.71 |
| Efficiencymax % | 5.55 | 5.43 | 5.51 | 6.28 | 6.11 | 6.07 |
| EfficiencyOP % | 5.21 | 5.09 | 5.35 | 5.84 | 5.70 | 5.64 |
| Component | Energy per Day [J] | |
|---|---|---|
| Absorbed | O2 (front-end) CO2 (front-end) CO2 (sensor) BME280 (sensor) I2C bus STM32L4Q5 (run mode) STM32L4Q5 (stop mode) RFM95x (run mode) RFM95x (sleep mode) TOT | 1.1405 0.9504 124.0272 0.0014 0.0396 4.7520 1.3781 0.1299 0.2851 132.7042 |
| Harvested | PV module | max 630.0000 |
| min 479.5200 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cappelli, I.; Fort, A.; Pozzebon, A.; Tani, M.; Trivellin, N.; Vignoli, V.; Bruzzi, M. Autonomous IoT Monitoring Matching Spectral Artificial Light Manipulation for Horticulture. Sensors 2022, 22, 4046. https://doi.org/10.3390/s22114046
Cappelli I, Fort A, Pozzebon A, Tani M, Trivellin N, Vignoli V, Bruzzi M. Autonomous IoT Monitoring Matching Spectral Artificial Light Manipulation for Horticulture. Sensors. 2022; 22(11):4046. https://doi.org/10.3390/s22114046
Chicago/Turabian StyleCappelli, Irene, Ada Fort, Alessandro Pozzebon, Marco Tani, Nicola Trivellin, Valerio Vignoli, and Mara Bruzzi. 2022. "Autonomous IoT Monitoring Matching Spectral Artificial Light Manipulation for Horticulture" Sensors 22, no. 11: 4046. https://doi.org/10.3390/s22114046