
Machine Learning Classification of Fused Sentinel-1 and Sentinel-2 Image Data towards Mapping Fruit Plantations in Highly Heterogenous Landscapes




Abstract
:1. Introduction
- To evaluate the effectiveness of RF and SVM in discriminating tree crops from each sensor separately;
- To examine if the application of RF and SVM classifiers on fused data can improve the crop mapping accuracy at the landscape level;
- Assess the use of selected important variables in improving the mapping accuracy of fruit tree crops at the landscape level.
2. Materials and Methods
2.1. Method Overview
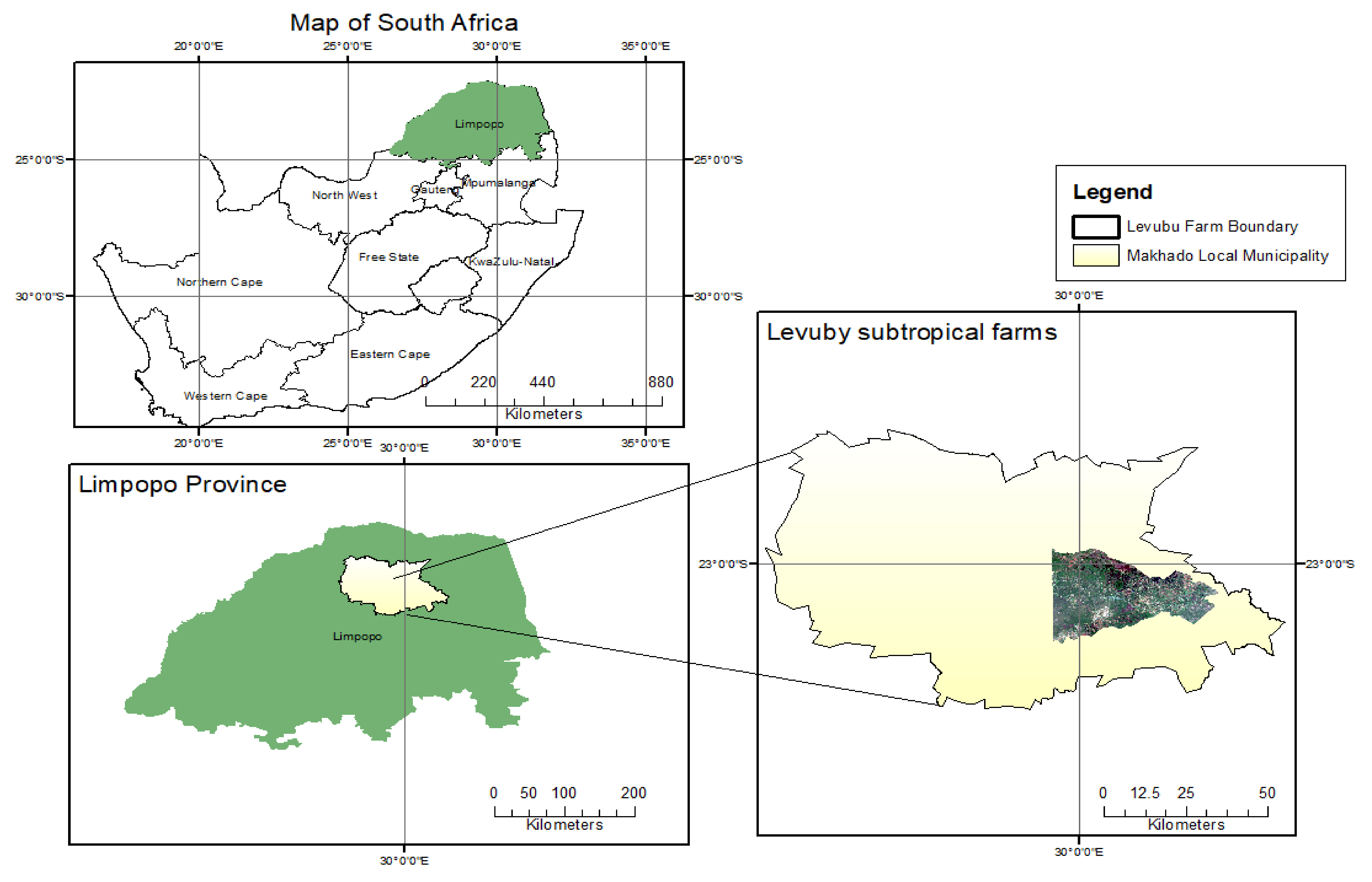
2.2. The Study Area
2.3. Remote Sensing Data Acquisition and Pre-Processing
2.4. Data Fusion
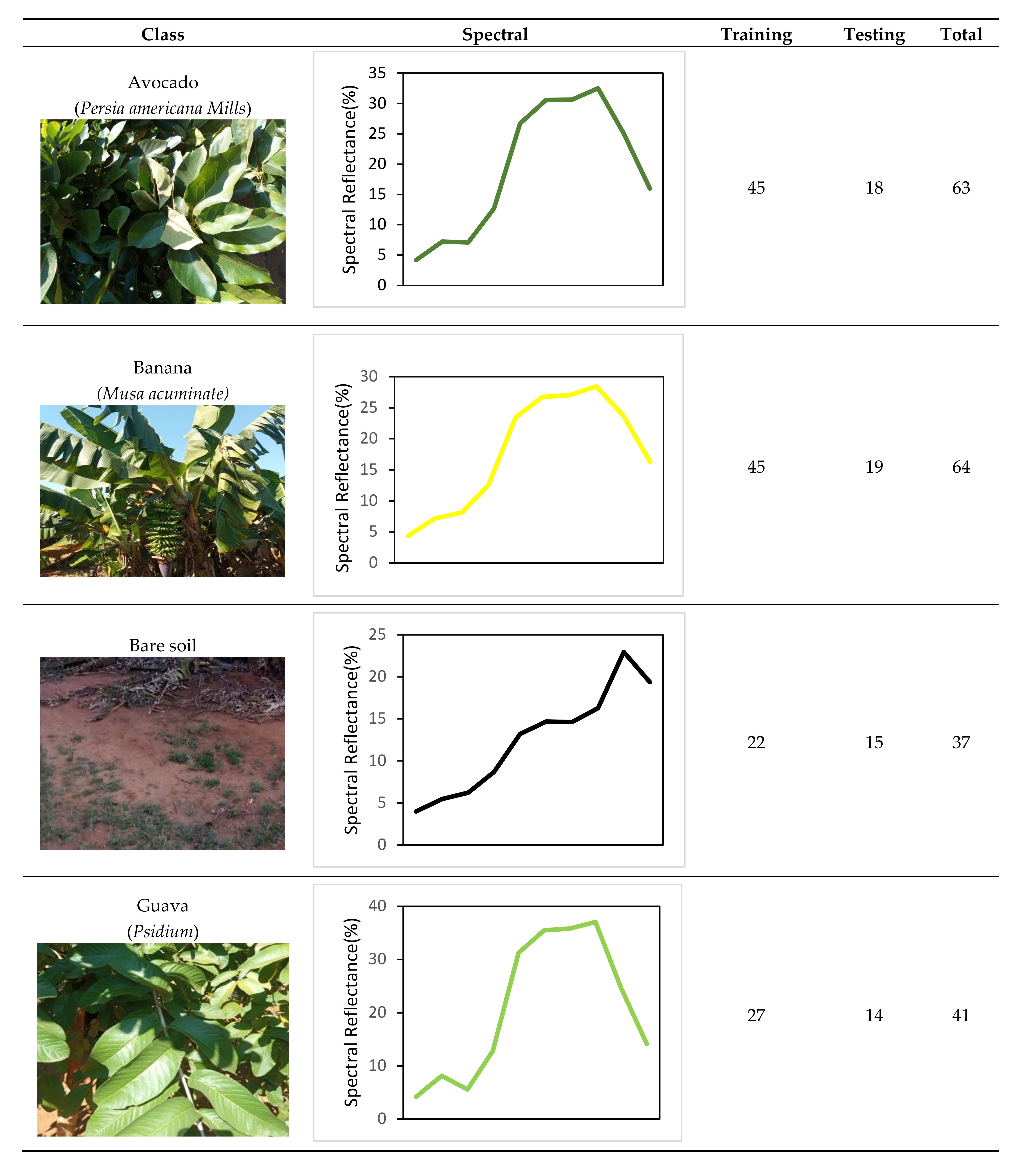
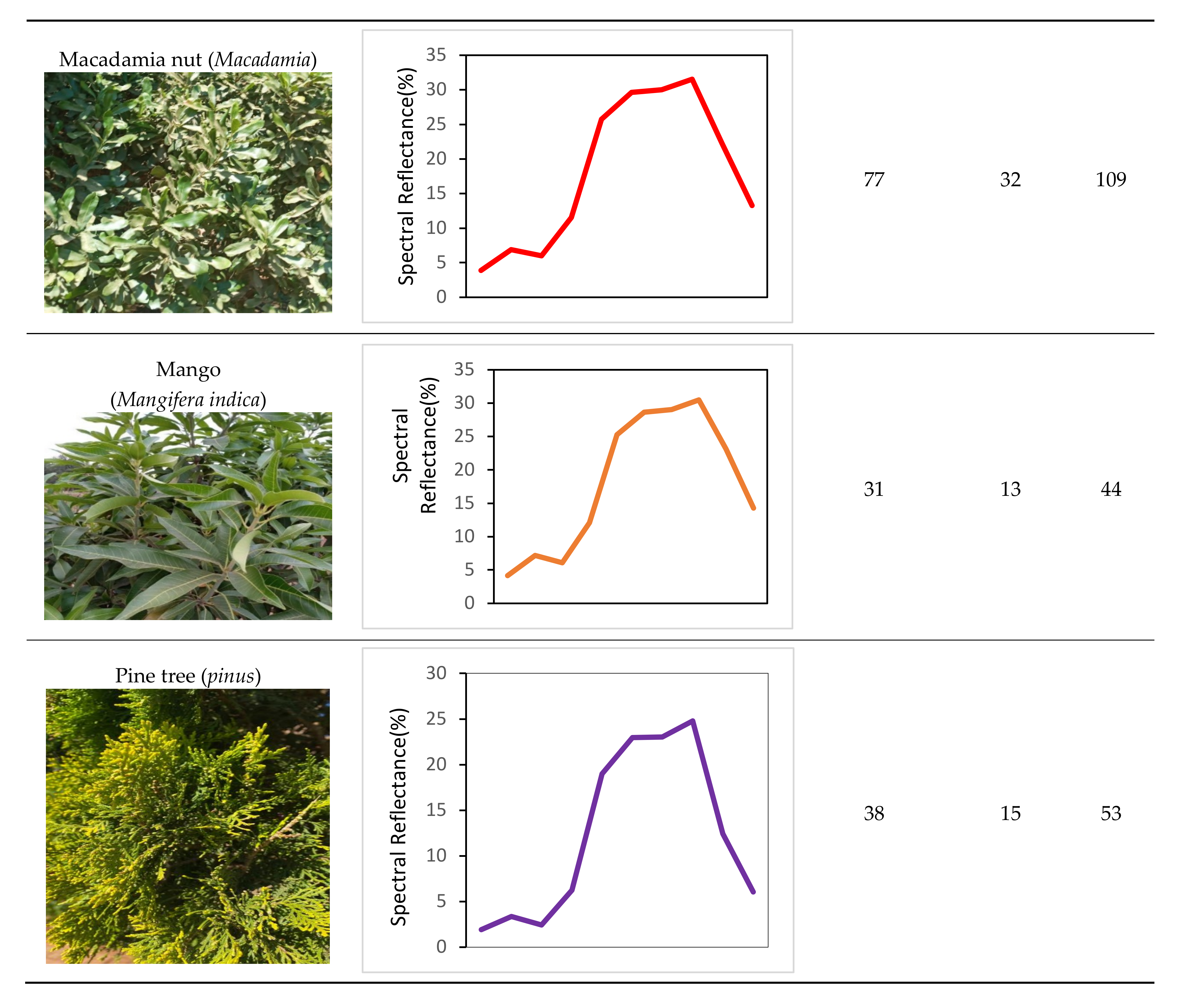
2.5. Field Data Collection
2.6. Assessing Spatial Autocorrelation
3. Image Classification
3.1. Machine learning Classification Algorithms
3.1.1. The Random Forest Algorithm (RF)
Assessing the Importance of Variables
Forward Variable Selection
3.1.2. The Support Vector Machines Algorithm (SVM)
3.2. Accuracy Assessment and Model Validation
4. Results
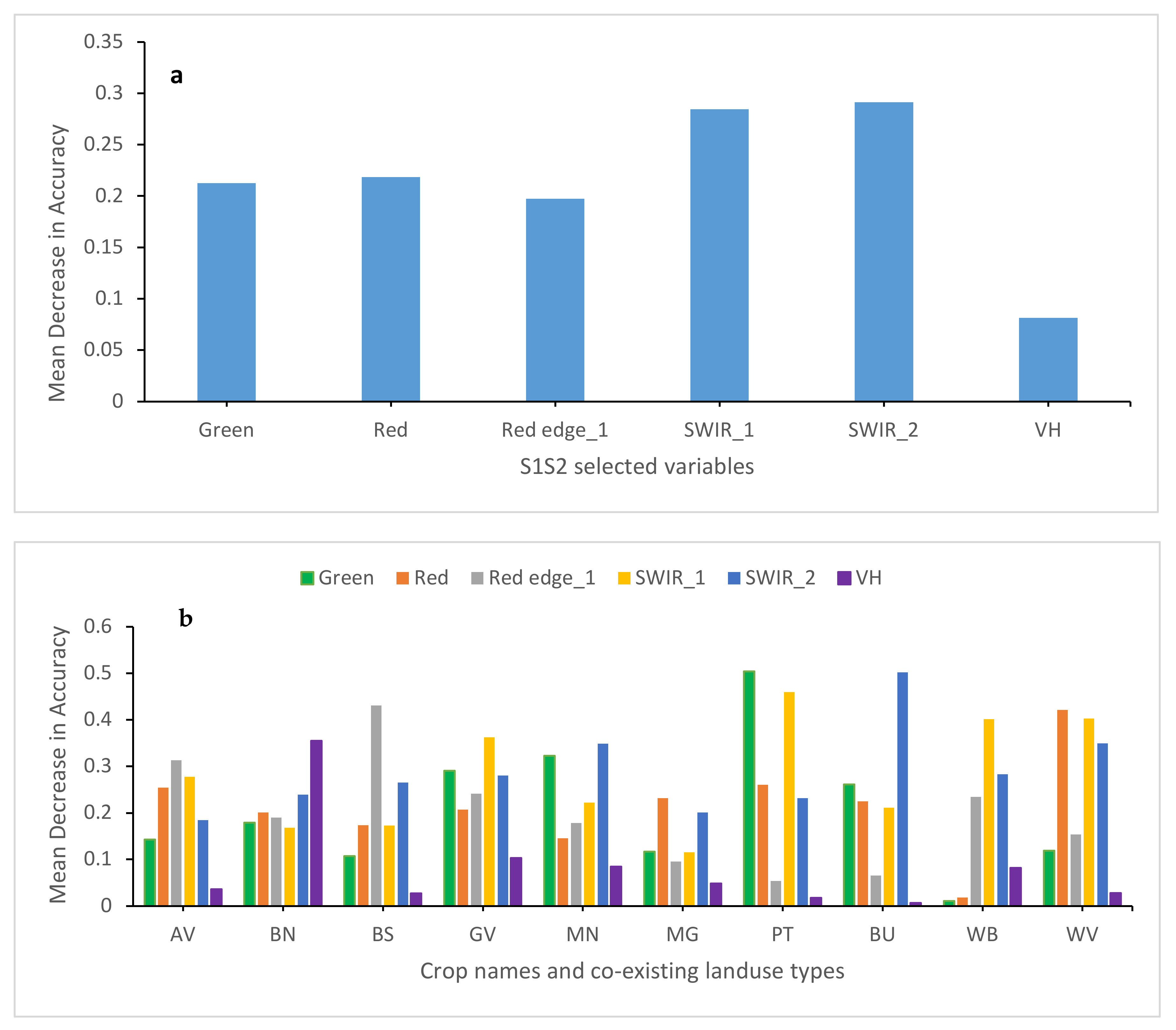
4.1. The Variable Importance
4.2. The Variable Selection Using the Forward Feature Selection (FFS) Method
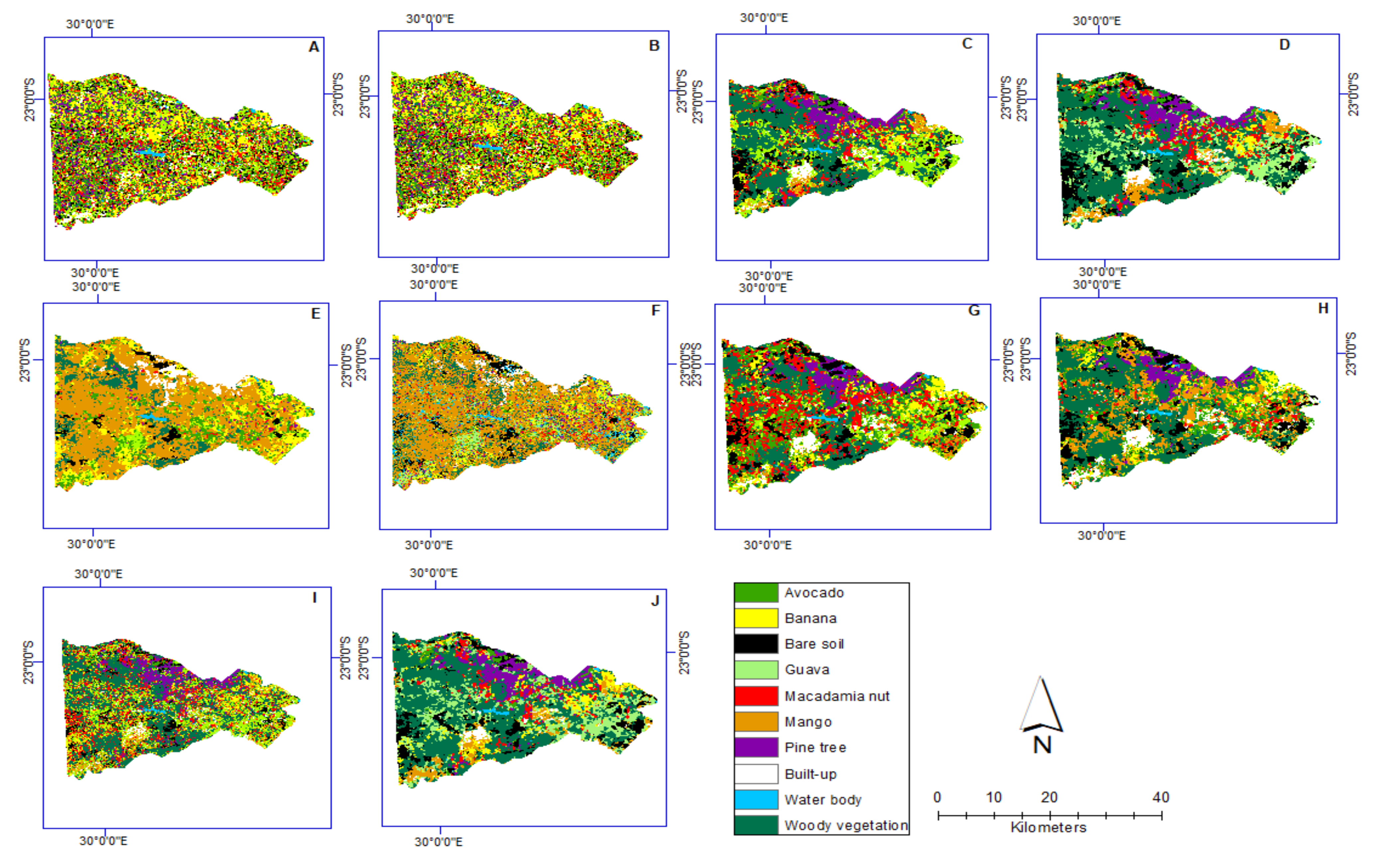
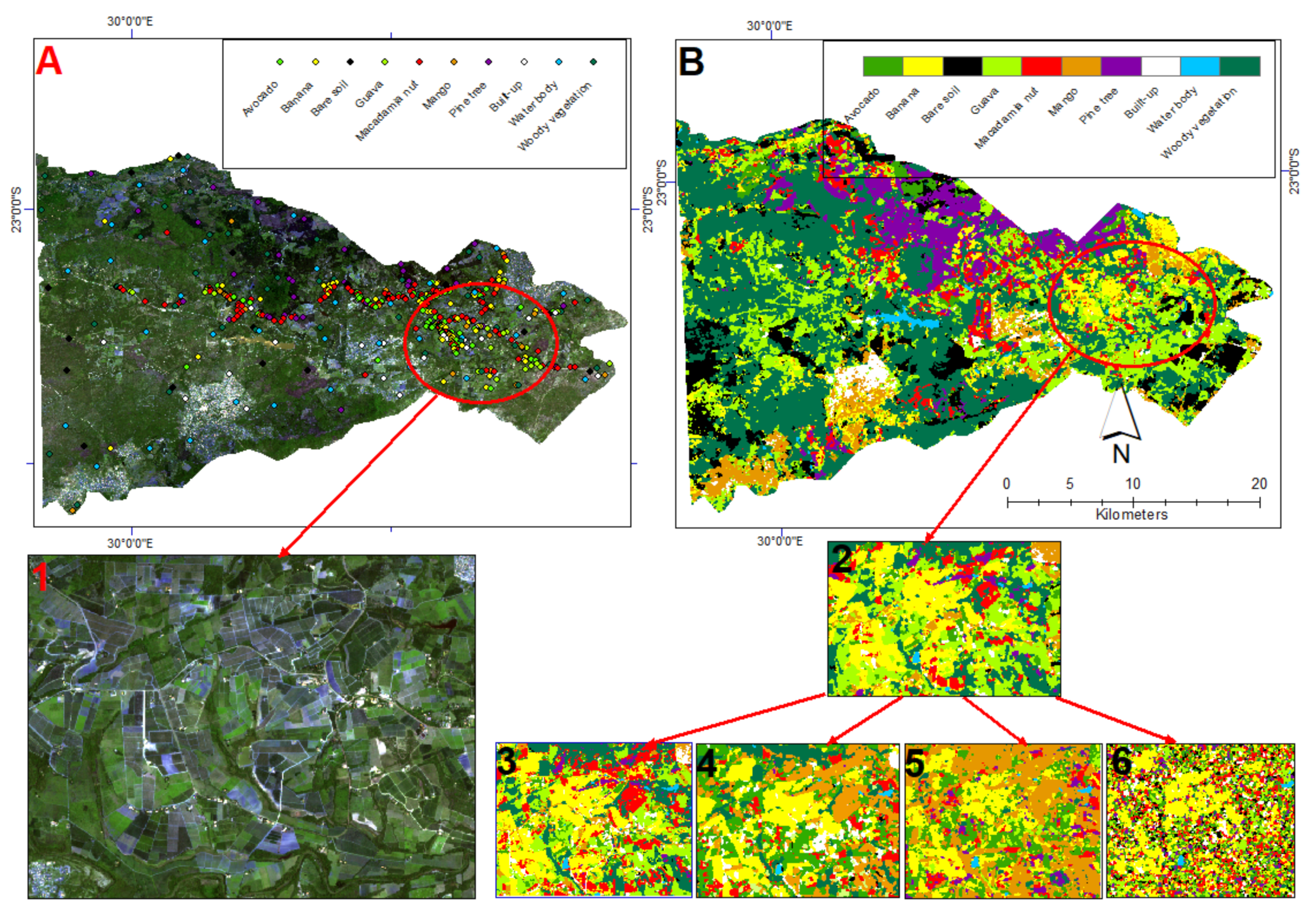
4.3. Mapping Outputs
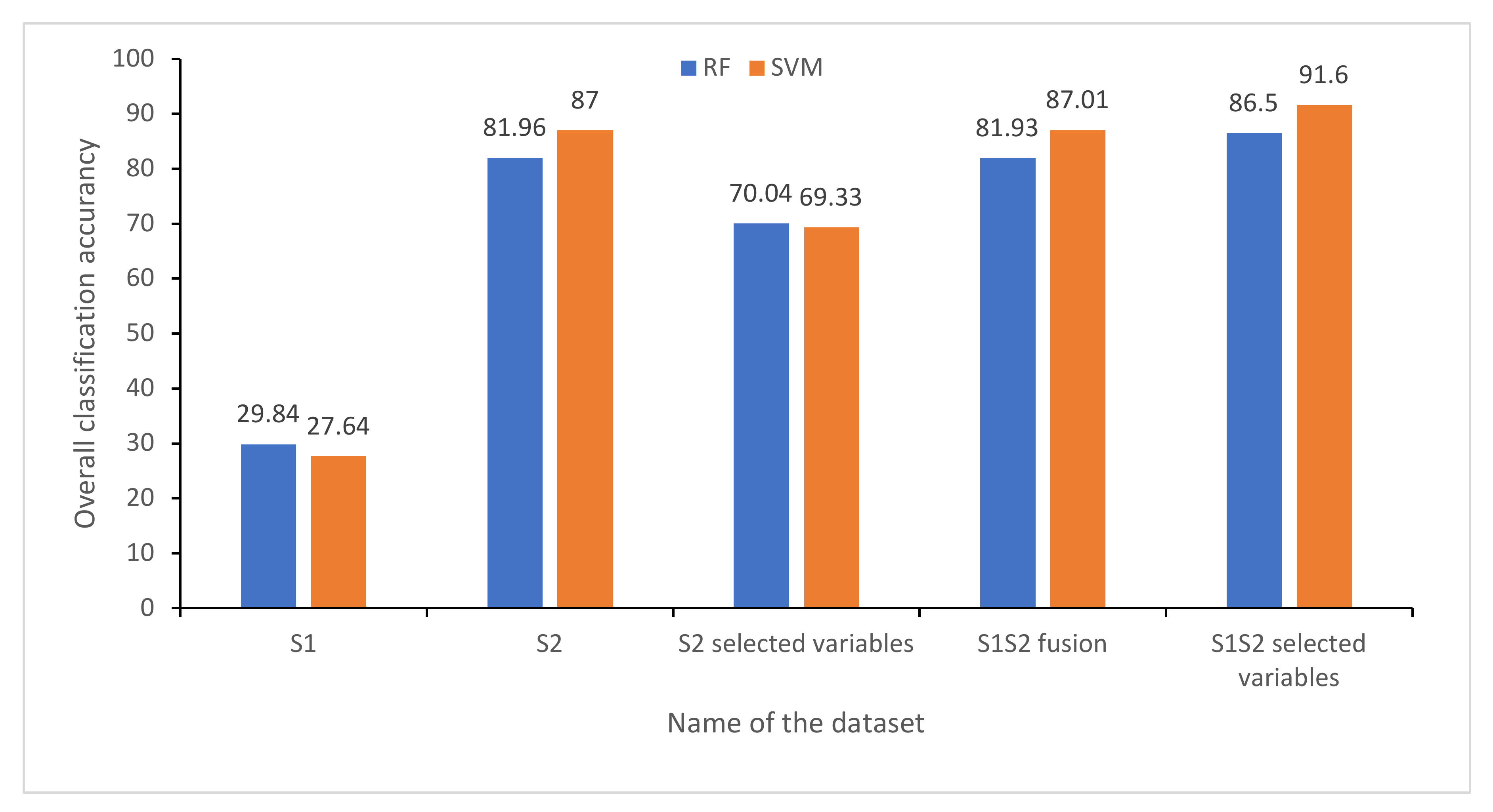
4.4. Classification Accuracy
4.5. Class Accuracies
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Crommelinck, S.; Höfle, B. Simulating an autonomously operating low-cost static terrestrial LiDAR for multitemporal maize crop height measurements. Remote Sens. 2016, 8, 205. [Google Scholar] [CrossRef] [Green Version]
- Abdel-Rahman, E.M.; Ahmed, F.B. The application of remote sensing techniques to sugarcane (Saccharum spp. hybrid) production: A review of the literature. Int. J. Remote Sens. 2008, 29, 3753–3767. [Google Scholar] [CrossRef]
- Brinkhoff, J.; Vardanega, J.; Robson, A.J. Land cover classification of nine perennial crops using sentinel-1 and -2 data. Remote Sens. 2020, 12, 96. [Google Scholar] [CrossRef] [Green Version]
- Useya, J.; Chen, S. Exploring the potential of mapping cropping patterns on smallholder scale croplands using Sentinel-1 SAR data. Chin. Geogr. Sci. 2019, 29, 626–639. [Google Scholar] [CrossRef] [Green Version]
- Mukwada, G.; Mazibuko, S.; Moeletsi, M.; Robinson, G. Can famine be averted? A spatiotemporal assessment of the impact of climate change on food security in the Luvuvhu River Catchment of South Africa. Land 2021, 10, 527. [Google Scholar] [CrossRef]
- Abbott, P.; Checco, A.; Polese, D. Smart farming in sub-Saharan Africa: Challenges and opportunities. Sensornets 2021, 1, 159–164. [Google Scholar] [CrossRef]
- Amare, M.; Mariara, J.; Oostendorp, R.; Pradhan, M. The impact of smallholder farmers’ participation in avocado export markets on the labor market, farm yields, sales prices, and incomes in Kenya. Land Use Policy 2019, 88, 104168. [Google Scholar] [CrossRef]
- Johansen, K.; Duan, Q.; Tu, Y.-H.; Searle, C.; Wu, D.; Phinn, S.; Robson, A.; McCabe, M.F. Mapping the condition of macadamia tree crops using multi-spectral UAV and WorldView-3 imagery. J. Photogramm. Remote Sens. 2020, 165, 28–40. [Google Scholar] [CrossRef]
- Danylo, O.; Pirker, J.; Lemoine, G.; Ceccherini, G.; See, L.; McCallum, I.; Hadi; Kraxner, F.; Achard, F.; Fritz, S. A map of the extent and year of detection of oil palm plantations in Indonesia, Malaysia and Thailand. Sci. Data 2021, 8, 4–11. [Google Scholar] [CrossRef]
- Ge, Y.; Bai, G.; Stoerger, V.; Schnable, J.C. Temporal dynamics of maize plant growth, water use, and leaf water content using automated high throughput RGB and hyperspectral imaging. Comput. Electron. Agric. 2016, 127, 625–632. [Google Scholar] [CrossRef] [Green Version]
- Kolecka, N.; Ginzler, C.; Pazur, R.; Price, B.; Verburg, P.H. Regional scale mapping of grassland mowing frequency with Sentinel-2 time series. Remote Sens. 2018, 10, 1221. [Google Scholar] [CrossRef] [Green Version]
- Sinha, R.; Quirós, J.J.; Sankaran, S.; Khot, L.R. High resolution aerial photogrammetry based 3D mapping of fruit crop canopies for precision inputs management. Inf. Process. Agric. 2021, 9, 1–13. [Google Scholar] [CrossRef]
- Meroni, M.; D’Andrimont, R.; Vrieling, A.; Fasbender, D.; Lemoine, G.; Rembold, F.; Seguini, L.; Verhegghen, A. Comparing land surface phenology of major European crops as derived from SAR and multispectral data of Sentinel-1 and -2. Remote Sens. Environ. 2021, 253, 112232. [Google Scholar] [CrossRef] [PubMed]
- Wolfert, S.; Ge, L.; Verdouw, C.; Bogaardt, M.-J. Big data in smart farming—A review. Agric. Syst. 2017, 153, 69–80. [Google Scholar] [CrossRef]
- Segarra, J.; Buchaillot, M.L.; Araus, J.L.; Kefauver, S.C. Remote sensing for precision agriculture: Sentinel-2 improved features and applications. Agronomy. 2020, 10, 641. [Google Scholar] [CrossRef]
- Kellengere Shankarnarayan, V.; Ramakrishna, H. Paradigm change in Indian agricultural practices using Big Data: Challenges and opportunities from field to plate. Inf. Processing Agric. 2020, 7, 355–368. [Google Scholar] [CrossRef]
- Sishodia, R.P.; Ray, R.L.; Singh, S.K. Applications of remote sensing in precision agriculture: A review. Remote Sens. 2020, 12, 3136. [Google Scholar] [CrossRef]
- Böhler, J.E.; Schaepman, M.E.; Kneubühler, M. Crop separability from individual and combined airborne imaging spectroscopy and UAV multispectral data. Remote Sens. 2020, 12, 1256. [Google Scholar] [CrossRef] [Green Version]
- Yandún Narváez, F.J.; Salvo del Pedregal, J.P.; Prieto, A.; Torres-Torriti, M.; Auat Cheein, F.A. LiDAR and thermal images fusion for ground-based 3D characterisation of fruit trees. Biosyst. Eng. 2016, 151, 479–494. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; Hartling, S.; Esposito, F.; Fritschi, F.B. Soybean yield prediction from UAV using multimodal data fusion and deep learning. Remote Sens. Environ. 2020, 237, 111599. [Google Scholar] [CrossRef]
- Bai, G.; Ge, Y.; Hussain, W.; Baenziger, P.S.; Graef, G. A multi-sensor system for high throughput field phenotyping in soybean and wheat breeding. Comput. Electron. Agric. 2016, 128, 181–192. [Google Scholar] [CrossRef] [Green Version]
- Bai, T.; Zhang, N.; Mercatoris, B.; Chen, Y. Improving jujube fruit tree yield estimation at the field scale by assimilating a single landsat remotely-sensed LAI into the WOFOST model. Remote Sens. 2019, 11, 1119. [Google Scholar] [CrossRef] [Green Version]
- Gilbertson, J.K.; Van Niekerk, A. Value of dimensionality reduction for crop differentiation with multi- temporal imagery and machine learning. Comput. Electron. Agric. 2017, 142, 50–58. [Google Scholar] [CrossRef]
- Qader, S.H.; Dash, J.; Alegana, V.A.; Khwarahm, N.R.; Tatem, A.J.; Atkinson, P.M. The role of earth observation in achieving sustainable agricultural production in arid and semi-arid regions of the world. Remote Sens. 2021, 13, 3382. [Google Scholar] [CrossRef]
- Aguilar, R.; Zurita-Milla, R.; Izquierdo-Verdiguier, E.; de By, R.A. A Cloud-Based Multi-Temporal Ensemble Classifier to Map Smallholder Farming Systems. Remote Sens. 2018, 10, 729. [Google Scholar] [CrossRef] [Green Version]
- Hong-xia, L.U.O.; Sheng-pei, D.A.I.; Mao-fen, L.I.; En-ping, L.I.U.; Qian, Z.; Ying-ying, H.U. Comparison of machine learning algorithms for mapping mango plantations based on Gaofen-1 imagery. J. Integr. Agric. 2020, 19, 2815–2828. [Google Scholar] [CrossRef]
- Lebourgeois, V.; Dupuy, S.; Vintrou, É.; Ameline, M.; Butler, S.; Bégué, A. A Combined random forest and OBIA classification scheme for mapping smallholder agriculture at different nomenclature levels using multisource data (simulated Sentinel-2 time series, VHRS and DEM). Remote Sens. 2017, 9, 259. [Google Scholar] [CrossRef] [Green Version]
- Veloso, A.; Mermoz, S.; Bouvet, A.; Le Toan, T.; Planells, M.; Dejoux, J.-F.; Ceschia, E. Understanding the temporal behavior of crops using Sentinel-1 and Sentinel-2-like data for agricultural applications. Remote Sens. Environ. 2017, 199, 415–426. [Google Scholar] [CrossRef]
- Rao, P.; Zhou, W.; Bhattarai, N.; Srivastava, A.; Singh, B.; Poonia, S.; Lobell, D.; Jain, M. Using Sentinel-1, Sentinel-2, and planet imagery to map crop type of smallholder farms. Remote Sens. 2021, 13, 1870. [Google Scholar] [CrossRef]
- Neigh, C.S.; Carroll, M.L.; Wooten, M.R.; McCarty, J.L.; Powell, B.F.; Husak, G.J.; Enenkel, M.; Hain, C.R. Smallholder crop area mapped with wall-to-wall WorldView sub-meter panchromatic image texture: A test case for Tigray, Ethiopia. Remote Sens. Environ. 2018, 212, 8–20. [Google Scholar] [CrossRef]
- Zheng, B.; Myint, S.W.; Thenkabail, P.S.; Aggarwal, R.M. A support vector machine to identify irrigated crop types using time-series Landsat NDVI data. Int. J. Appl. Earth Obs. Geoinf. 2015, 34, 03–112. [Google Scholar] [CrossRef]
- Chemura, A.; van Duren, I.; van Leeuwen, L.M. Determination of the age of oil palm from crown projection area detected from WorldView-2 multispectral remote sensing data: The case of Ejisu-Juaben district, Ghana. ISPRS J. Photogramm. Remote Sens. 2015, 100, 118–127. [Google Scholar] [CrossRef]
- Torbick, N.; Chowdhury, D.; Salas, W.; Qi, J. Monitoring rice agriculture across myanmar using time series Sentinel-1 assisted by Landsat-8 and PALSAR-2. Remote Sens. 2017, 9, 119. [Google Scholar] [CrossRef] [Green Version]
- Steinhausen, M.J.; Wagner, P.; Narasimhan, B.; Waske, B. Combining Sentinel-1 and Sentinel-2 data for improved land use and land cover mapping of monsoon regions. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 595–604. [Google Scholar] [CrossRef]
- Yang, H.; Pan, B.; Li, N.; Wang, W.; Zhang, J.; Zhang, X. A systematic method for spatio-temporal phenology estimation of paddy rice using time series Sentinel-1 images. Remote Sens. Environ. 2021, 259, 112394. [Google Scholar] [CrossRef]
- Faye, G.; Mbengue, F.; Coulibaly, L.; Sarr, M.A.; Mbaye, M.; Tall, A.; Tine, D.; Marigo, O.; Ndour, M.M.M. Complementarity of Sentinel-1 and Sentinel-2 data for mapping agricultural areas in Senegal. Adv. Remote Sens. 2020, 9, 101–115. [Google Scholar] [CrossRef]
- Moumni, A.; Lahrouni, A. Machine learning-based classification for crop-type mapping using the fusion of high-resolution satellite imagery in a semiarid area. Scientifica 2021, 2021, 8810279. [Google Scholar] [CrossRef]
- Ren, T.; Xu, H.; Cai, X.; Yu, S.; Qi, J. Smallholder crop type mapping and rotation monitoring in mountainous areas with Sentinel-1/2 imagery. Remote Sens. 2022, 14, 566. [Google Scholar] [CrossRef]
- Cai, Y.; Lin, H.; Zhang, M. Mapping paddy rice by the object-based random forest method using time series Sentinel-1/Sentinel-2 data. Adv. Space Res. 2019, 64, 2233–2244. [Google Scholar] [CrossRef]
- Orynbaikyzy, A.; Gessner, U.; Conrad, C. Crop type classification using a combination of optical and radar remote sensing data: A review. Int. J. Remote Sens. 2019, 40, 6553–6595. [Google Scholar] [CrossRef]
- Wardlow, B.D.; Egbert, S.L.; Kastens, J.H. Analysis of time-series MODIS 250 m vegetation index data for crop classification in the U.S. Central Great Plains. Remote Sens. Environ. 2007, 108, 290–310. [Google Scholar] [CrossRef] [Green Version]
- Ni, R.; Tian, J.; Xiaojuan, L.; Yin, D.; Li, J.; Gong, H.; Zhang, J.; Zhu, L.; Wu, D. An enhanced pixel-based phenological feature for accurate paddy rice mapping with Sentinel-2 imagery in Google Earth Engine. ISPRS J. Photogramm. Remote Sens. 2021, 178, 282–296. [Google Scholar] [CrossRef]
- Van Tricht, K.; Gobin, A.; Gilliams, S.; Piccard, I. Synergistic use of radar Sentinel-1 and optical Sentinel-2 imagery for crop mapping: A Case study for Belgium. Remote Sens. 2018, 10, 1642. [Google Scholar] [CrossRef] [Green Version]
- Ni, R.; Tian, J.; Xiaojuan, L.; Yin, D.; Li, J.; Gong, H.; Zhang, J.; Zhu, L.; Wu, D. Mapping sugarcane plantation dynamics in Guangxi, China, by time series Sentinel-1, Sentinel-2 and Landsat images. Remote Sens. Environ. 2020, 247, 111951. [Google Scholar] [CrossRef]
- Blickensdörfer, L.; Schwieder, M.; Pflugmacher, D.; Nendel, C.; Erasmi, S.; Hostert, P. Mapping of crop types and crop sequences with combined time series of Sentinel-1, Sentinel-2 and Landsat 8 data for Germany. Remote Sens. Environ. 2022, 269, 112831. [Google Scholar] [CrossRef]
- Lakshmanan, G.; Mathiyazhagan, K. Machine learning classifiers on Sentinel-2 satellite image for the classification of banana (Musa Sp.) plantations of Theni district, Tamil Nadu, India. Machine learning classifiers on sentinel-2 satellite image for the classification of banana (Musa Sp.). Int. J. Chem. Stud. 2019, 7, 1419–1425. Available online: https://www.researchgate.net/publication/344769033 (accessed on 13 March 2021).
- Gené-Mola, J.; Gregorio, E.; Cheein, F.A.; Guevara, J.; Llorens, J.; Sanz-Cortiella, R.; Escolà, A.; Rosell-Polo, J.R. Fruit detection, yield prediction and canopy geometric characterization using LiDAR with forced air flow. Comput. Electron. Agric. 2020, 168, 105121. [Google Scholar] [CrossRef]
- Conrad, Y.; Zhong, X.; Hu, L.W.; Zhang, L. Remote Sensing of Environment A robust spectral-spatial approach to identifying heterogeneous crops using remote sensing imagery with high spectral and spatial resolutions. Remote Sens. Environ. 2019, 239, 111605. [Google Scholar] [CrossRef]
- Bargiel, D. A new method for crop classification combining time series of radar images and crop phenology information. Elsevier Inc. Remote Sens. Environ. 2017, 198, 369–383. [Google Scholar] [CrossRef]
- Ouzemou, J.-E.; El Harti, A.; Lhissou, R.; El Moujahid, A.; Bouch, N.; El Ouazzani, R.; Bachaoui, E.M.; El Ghmari, A. Crop type mapping from pansharpened Landsat 8 NDVI data: A case of a highly fragmented and intensive agricultural system. Remote Sens. Appl. Soc. Environ. 2018, 11, 94–103. [Google Scholar] [CrossRef]
- Saini, R.; Ghosh, S.K. Crop classification in a heterogeneous agricultural environment using ensemble classifiers and single-date Sentinel-2A imagery. Geocarto Int. 2021, 36, 2141–2159. [Google Scholar] [CrossRef]
- Prins, A.J.; Van Niekerk, A. Crop type mapping using LiDAR, Sentinel-2 and aerial imagery with machine learning algorithms. Geo-Spat. Inf. Sci. 2021, 24, 215–227. [Google Scholar] [CrossRef]
- Sarzynski, T.; Giam, X.; Carrasco, L.; Lee, J.S.H. Combining radar and optical imagery to map oil palm plantations in Sumatra, Indonesia, using the google earth engine. Remote Sens. 2020, 12, 1220. [Google Scholar] [CrossRef] [Green Version]
- Qadir, A.; Mondal, P. Synergistic Use of Radar and Optical Satellite Data for Improved Monsoon Cropland Mapping in India. Remote Sens. 2020, 12, 522. [Google Scholar] [CrossRef] [Green Version]
- Kraaijvanger, R.; Singh, V.; Ajay, N.P.; Apurva, D.; Jaydipsinh, K.; Jignesh, S.K. Exploring the Potential of Mapping Cropping Patterns on Smallholder Scale Croplands Using Sentinel-1 SAR Data. Remote Sens. 2019, 11, 1–18. [Google Scholar] [CrossRef]
- VDM, “Vhembe District Municipality 2020 / 21 Idp Review. 2020. Available online: http://www.vhembe.gov.za (accessed on 16 December 2021).
- Berger, M.; Moreno, J.; Johannessen, J.A.; Levelt, P.F.; Hanssen, R.F. ESA’s sentinel missions in support of Earth system science. Remote Sens. Environ. 2012, 120, 84–90. [Google Scholar] [CrossRef]
- ESA. ESA’s Optical High-Resolution Mission for GMES Operational Services; ESA: Paris, France, 2015. [Google Scholar]
- Clevers, J.G.P.W.; Gitelson, A.A. Remote estimation of crop and grass chlorophyll and nitrogen content using red-edge bands on Sentinel-2 and -3. Int. J. Appl. Earth Observ. Geoinf. 2013, 23, 344–351. [Google Scholar] [CrossRef]
- Louis, J.; Debaecker, V.; Pflug, B.; Main-Knorn, M.; Bieniarz, J.; Mueller-Wilm, U.; Cadau, E.; Gascon, F. Sentinel-2 SEN2COR: L2A processor for users. In Proceedings of the Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016; pp. 9–13. [Google Scholar]
- Haas, J.; Ban, Y. Sentinel-1A SAR and sentinel-2A MSI data fusion for urban ecosystem service mapping. Remote Sens. Appl. Soc. Environ. 2017, 8, 41–53. [Google Scholar] [CrossRef]
- Vreugdenhil, M.; Wagner, W.; Bauer-Marschallinger, B.; Pfeil, I.; Teubner, I.; Rüdiger, C.; Strauss, P. Sensitivity of Sentinel-1 backscatter to vegetation dynamics: An Austrian case study. Remote Sens. 2018, 10, 1396. [Google Scholar] [CrossRef] [Green Version]
- Zhang, M.; Wu, B.; Yu, M.; Zou, W.; Zheng, Y. Crop condition assessment with adjusted NDVI using the uncropped arable land ratio. Remote Sens. 2014, 6, 5774–5794. [Google Scholar] [CrossRef] [Green Version]
- Abubakar, G.A.; Wang, K.; Shahtahamssebi, A.; Xue, X.; Belete, M.; Gudo, A.J.A.; Shuka, K.A.M.; Gan, M. Mapping maize fields by using multi-temporal Sentinel-1A and Sentinel-2A images in Makarfi, Northern Nigeria, Africa. Sustainability 2020, 12, 2539. [Google Scholar] [CrossRef] [Green Version]
- Waldner, F.; Bellemans, N.; Hochman, Z.; Newby, T.; de Abelleyra, D.; Verón, S.R.; Bartalev, S.; Lavreniuk, M.; Kussul, N.; Le Maire, G.; et al. Roadside collection of training data for cropland mapping is viable when environmental and management gradients are surveyed. Int. J. Appl. Earth Obs. Geoinf. 2019, 80, 82–93. [Google Scholar] [CrossRef]
- Fowler, J.; Waldner, F.; Hochman, Z. All pixels are useful, but some are more useful: Efficient in situ data collection for crop-type mapping using sequential exploration methods. Int. J. Appl. Earth Obs. Geoinf. 2020, 91, 102114. [Google Scholar] [CrossRef]
- Ahmed, N.; Atzberger, C.; Zewdie, W. Species Distribution Modelling performance and its implication for Sentinel-2-based prediction of invasive Prosopis juliflora in lower Awash River basin, Ethiopia. Ecol. Process. 2021, 10, 1–16. [Google Scholar] [CrossRef]
- Abdulhafedh, A.A. Novel hybrid method for measuring the spatial autocorrelation of vehicular crashes: Combining Moran’s Index and Getis-Ord Gi* statistic. Open J. Civ. Eng. 2017, 7, 208–221. [Google Scholar] [CrossRef] [Green Version]
- Hansch, R.; Ley, A.; Hellwich, O. Correct and still wrong: The relationship between sampling strategies and the estimation of the generalization error. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 3672–3675. [Google Scholar]
- Kuhn, M. Futility Analysis in the Cross-Validation of Machine Learning Models. arXiv 2014, arXiv:1405.6974. [Google Scholar]
- Feyisa, G.L.; Palao, L.K.; Nelson, A.; Gumma, M.K.; Paliwal, A.; Win, K.T.; Nge, K.H.; Johnson, D.E. Characterizing and mapping cropping patterns in a complex agro-ecosystem: An iterative participatory mapping procedure using machine learning algorithms and MODIS vegetation indices. Comput. Electron. Agric. 2020, 175, 105595. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Tatsumi, K.; Yamashiki, Y.; Torres, M.A.C.; Taipe, C.L.R. Crop classification of upland fields using Random forest of time-series Landsat 7 ETM+ data. Comput. Electron. Agric. 2015, 115, 171–179. [Google Scholar] [CrossRef]
- Zhang, H.; Kang, J.; Xu, X.; Zhang, L. Accessing the temporal and spectral features in crop type mapping using multi-temporal Sentinel-2 imagery: A case study of Yi’an County, Heilongjiang province, China. Comput. Electron. Agric. 2020, 176, 105618. [Google Scholar] [CrossRef]
- Abdullah, A.Y.M.; Masrur, A.; Gani Adnan, M.S.; Baky, M.; Al, A.; Hassan, Q.K.; Dewan, A. Spatio-temporal patterns of land use/land cover change in the heterogeneous coastal region of Bangladesh between 1990 and 2017. Remote Sens. 2019, 11, 790. [Google Scholar] [CrossRef] [Green Version]
- Mashaba-Munghemezulu, Z.; Chirima, G.; Munghemezulu, C. Mapping smallholder maise farms using multi-temporal Sentinel-1 data in support of the sustainable development goals. Remote Sens. 2021, 13, 1666. [Google Scholar] [CrossRef]
- Genuer, R.; Poggi, J.-M.; Tuleau-Malot, C. VSURF: An R package for variable selection using random forests. R J. 2015, 7, 19–33. [Google Scholar] [CrossRef] [Green Version]
- Richard, K.; Abdel-Rahman, E.M.; Subramanian, S.; Nyasani, J.O.; Thiel, M.; Jozani, H.; Borgemeister, C.; Landmann, T. Maize cropping systems mapping using rapideye observations in agro-ecological landscapes in Kenya. Sensors 2017, 17, 2537. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Li, M.; Fu, Y. Forest type identification by random forest classification combined with SPOT and multitemporal SAR data. J. For. Res. 2018, 29, 1407–1414. [Google Scholar] [CrossRef]
- Zhao, W.; Qu, Y.; Chen, J.; Yuan, Z. Deeply synergistic optical and SAR time series for crop dynamic monitoring. Remote Sens. Environ. 2020, 247, 111952. [Google Scholar] [CrossRef]
- Cui, J.; Zhang, X.; Wang, W.; Wang, L. Integration of optical and SAR remote sensing images for crop-type mapping based on a novel object-oriented feature selection method. Int. J. Agric. Biol. Eng. 2020, 13, 178–190. [Google Scholar] [CrossRef]
- Chan, J.C.-W.; Paelinckx, D. Evaluation of random forest and Adaboost tree-based ensemble classification and spectral band selection for ecotope mapping using airborne hyperspectral imagery. Remote Sens. Environ. 2008, 112, 2999–3011. [Google Scholar] [CrossRef]
- Vuolo, F.; Neuwirth, M.; Immitzer, M.; Atzberger, C.; Ng, W.-T. How much does multi-temporal Sentinel-2 data improve crop type classification? Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 122–130. [Google Scholar] [CrossRef]
- Schmidt, M.; Pringle, M.; Devadas, R.; Denham, R.; Tindall, D. A framework for large-area mapping of past and present cropping activity using seasonal landsat images and time series metrics. Remote Sens. 2016, 8, 312. [Google Scholar] [CrossRef] [Green Version]
- Zhang, P.; Hu, S.; Li, W.; Zhang, C. Parcel-level mapping of crops in a smallholder agricultural area: A case of central China using single-temporal VHSR imagery. Comput. Electron. Agric. 2020, 175, 105581. [Google Scholar] [CrossRef]
- Zhao, K.; Valle, D.; Popescu, S.; Zhang, X.; Mallick, B. Hyperspectral remote sensing of plant biochemistry using Bayesian model averaging with variable and band selection. Remote Sens. Environ. 2013, 132, 102–119. [Google Scholar] [CrossRef]
- Adam, E.M.; Mutanga, O.; Rugege, D.; Ismail, R. Discriminating the papyrus vegetation (Cyperus papyrus L.) and its co-existent species using random forest and hyperspectral data resampled to HYMAP. Int. J. Remote Sens. 2012, 33, 552–569. [Google Scholar] [CrossRef]
- Hu, Q.; Wu, W.-B.; Song, Q.; Lu, M.; Chen, D.; Yu, Q.; Tang, H.-J. How do temporal and spectral features matter in crop classification in Heilongjiang Province, China? J. Integr. Agric. 2017, 16, 324–336. [Google Scholar] [CrossRef]
- Loggenberg, K.; Strever, A.; Greyling, B.; Poona, N. Modelling water stress in a shiraz vineyard using hyperspectral imaging and machine learning. Remote Sens. 2018, 10, 202. [Google Scholar] [CrossRef] [Green Version]
- Morin, D.; Planells, M.; Guyon, D.; Villard, L.; Mermoz, S.; Bouvet, A.; Thevenon, H.; Dejoux, J.-F.; Le Toan, T.; Dedieu, G. Estimation and mapping of forest structure parameters from open access satellite images: Development of a generic method with a study case on coniferous plantation. Remote Sens. 2019, 11, 1275. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Zhang, J. A data transfer fusion method for discriminating similar spectral classes. Sensors 2016, 16, 1895. [Google Scholar] [CrossRef] [Green Version]
- Vapnik, N.V. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995; p. 334. Available online: https://ci.nii.ac.jp/naid/10020951890 (accessed on 18 November 2021).
- Vapnik, V.N. The Nature of Statistical Learning Theory, 2nd ed.; Springer: New York, NY, USA, 2000. [Google Scholar]
- Zhang, S.; Guo, J.; Luo, N.; Wang, L.; Wang, W.; Wen, K. Improving Wi-Fi fingerprint positioning with a pose recognition-assisted SVM algorithm. Remote Sens. 2019, 11, 652. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.; Liu, Z.; Ali Baig, M.H.; Wang, Y.; Li, Y.; Chen, Y. Mapping sugarcane in complex landscapes by integrating multi-temporal Sentinel-2 images and machine learning algorithms. Land Use Policy. 2019, 88, 104190. [Google Scholar] [CrossRef]
- Kranjčić, N.; Medak, D.; Župan, R.; Rezo, M. Support vector machine accuracy assessment for extracting green urban areas in towns. Remote Sens. 2019, 11, 655. [Google Scholar] [CrossRef] [Green Version]
- Vluymans, S. Learning from imbalanced data. IEEE Stud. Comput. Intell. 2019, 807, 81–110. [Google Scholar] [CrossRef]
- Maldonado, W.; Barbosa, J.C. Automatic green fruit counting in orange trees using digital images. Comput. Electron. Agric. 2016, 127, 572–581. [Google Scholar] [CrossRef] [Green Version]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Gómez, C.; White, J.C.; Wulder, M.A. Optical remotely sensed time series data for land cover classification: A review. ISPRS J. Photogramm. Remote Sens. 2016, 116, 55–72. [Google Scholar] [CrossRef] [Green Version]
- Taghizadeh-Mehrjardi, R.; Schmidt, K.; Eftekhari, K.; Behrens, T.; Jamshidi, M.; Davatgar, N.; Toomanian, N.; Scholten, T. Synthetic resampling strategies and machine learning for digital soil mapping in Iran. Eur. J. Soil Sci. 2020, 71, 352–368. [Google Scholar] [CrossRef]
- Mandanici, E.; Bitelli, G. Preliminary comparison of Sentinel-2 and Landsat 8 imagery for a combined use. Remote Sens. 2016, 8, 1014. [Google Scholar] [CrossRef] [Green Version]
- Zeyada, H.H.; Ezz, M.; Nasr, A.; Shokr, M.; Harb, H.M. Evaluation of the discrimination capability of full polarimetric SAR data for crop classification. Int. J. Remote Sens. 2016, 37, 2585–2603. [Google Scholar] [CrossRef]
- Conrad, C.; Dech, S.; Dubovyk, O.; Fritsch, S.; Klein, D.; Löw, F.; Schorcht, G.; Zeidler, J. Derivation of temporal windows for accurate crop discrimination in heterogeneous croplands of Uzbekistan using multitemporal RapidEye images. Comput. Electron. Agric. 2014, 103, 63–74. [Google Scholar] [CrossRef]
- Preidl, S.; Lange, M.; Doktor, D. Introducing APiC for regionalised land cover mapping on the national scale using Sentinel-2A imagery. Remote Sens. Environ. 2020, 240, 111673. [Google Scholar] [CrossRef]
- Sun, L.; Chen, J.; Han, Y. Joint use of time series Sentinel-1 and Sentinel-2 imagery for cotton field mapping in heterogeneous cultivated areas of Xinjiang, China. In Proceedings of the 2019 8th International Conference on Agro-Geoinformatics (Agro-Geoinformatics), Istanbul, Turkey, 16–19 July 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Heckel, K.; Urban, M.; Schratz, P.; Mahecha, M.D.; Schmullius, C. Predicting forest cover in distinct ecosystems: The potential of multi-source Sentinel-1 and -2 data fusion. Remote Sens. 2020, 12, 302. [Google Scholar] [CrossRef] [Green Version]
- Clerici, N.; Calderón, C.A.V.; Posada, J.M. Fusion of Sentinel-1A and Sentinel-2A data for land cover mapping: A case study in the lower Magdalena region, Colombia. J. Maps 2017, 13, 718–726. [Google Scholar] [CrossRef] [Green Version]
- Mercier, A.; Betbeder, J.; Baudry, J.; Le Roux, V.; Spicher, F.; Lacoux, J.; Roger, D.; Hubert-Moy, L. Evaluation of Sentinel-1 & 2 time series for predicting wheat and rapeseed phenological stages. ISPRS J. Photogramm. Remote Sens. 2020, 163, 231–256. [Google Scholar] [CrossRef]
- Tavares, P.A.; Beltrão, N.E.S.; Guimarães, U.S.; Teodoro, A.C. Integration of Sentinel-1 and Sentinel-2 for classification and LULC mapping in the urban area of Belém, eastern Brazilian Amazon. Sensors 2019, 19, 1140. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Akbari, E.; Boloorani, A.D.; Samany, N.N.; Hamzeh, S.; Soufizadeh, S.; Pignatti, S. Crop mapping using random forest and particle swarm optimisation based on multi-temporal Sentinel-2. Remote Sens. 2020, 12, 1449. [Google Scholar] [CrossRef]
- Talema, T.; Hailu, B.T. Mapping rice crop using sentinels (1 SAR and 2 MSI) images in tropical area: A case study in Fogera wereda, Ethiopia. Remote Sens. Appl. Soc. Environ. 2020, 18, 100290. [Google Scholar] [CrossRef]
- Punalekar, S.; Verhoef, A.; Quaife, T.; Humphries, D.; Bermingham, L.; Reynolds, C. Application of Sentinel-2A data for pasture biomass monitoring using a physically based radiative transfer model. Remote Sens. Environ. 2018, 218, 207–220. [Google Scholar] [CrossRef]
- Muro, J.; Canty, M.; Conradsen, K.; Hüttich, C.; Nielsen, A.A.; Skriver, H.; Remy, F.; Strauch, A.; Thonfeld, F.; Menz, G. Short-term change detection in wetlands using Sentinel-1 time series. Remote Sens. 2016, 8, 795. [Google Scholar] [CrossRef] [Green Version]
- Kyere, I.; Astor, T.; Graß, R.; Wachendorf, M. Agricultural crop discrimination in a heterogeneous low-mountain range region based on multi-temporal and multi-sensor satellite data. Comput. Electron. Agric. 2020, 179, 105864. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sentinel 2 MSI | Sentinel-1 SAR | Wavelength | ||||
|---|---|---|---|---|---|---|
| Band | Name | Centre | Width | Resolution(m) | Name | Centre |
| 2 | Blue | 490 | 65 | 10 | VH polarization | C-band |
| 3 | Green | 560 | 35 | 10 | VV polarization | C-band |
| 4 | Red | 665 | 30 | 10 | ||
| 5 | Red edge | 705 | 15 | 20 | ||
| 6 | Red edge | 740 | 15 | 20 | ||
| 7 | Red edge | 783 | 20 | 20 | ||
| 8 | NIR | 842 | 115 | 10 | ||
| 8a | Narrow NIR | 865 | 20 | 20 | ||
| 11 | SWIR | 1610 | 30 | 20 | ||
| 12 | SWIR | 2190 | 180 | 20 |
| (A) RF-S1 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Class | AV | BN | BS | GV | MN | MG | PT | ST | WB | WV | Total |
| AV | 4 | 2 | 1 | 2 | 2 | 2 | 1 | 2 | 0 | 2 | 18 |
| BN | 2 | 5 | 3 | 2 | 2 | 3 | 0 | 1 | 0 | 1 | 19 |
| BS | 1 | 1 | 4 | 2 | 1 | 1 | 2 | 1 | 1 | 1 | 15 |
| GV | 2 | 1 | 3 | 4 | 1 | 2 | 1 | 0 | 0 | 0 | 14 |
| MN | 4 | 8 | 3 | 4 | 4 | 2 | 2 | 2 | 1 | 1 | 31 |
| MG | 2 | 1 | 0 | 2 | 2 | 4 | 1 | 1 | 0 | 0 | 13 |
| PT | 1 | 0 | 0 | 2 | 1 | 2 | 8 | 1 | 0 | 0 | 15 |
| BU | 2 | 2 | 1 | 0 | 0 | 2 | 1 | 4 | 0 | 1 | 13 |
| WB | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 12 | 0 | 15 |
| WV | 2 | 2 | 1 | 0 | 0 | 1 | 1 | 1 | 2 | 13 | 23 |
| Total | 21 | 22 | 16 | 18 | 13 | 19 | 17 | 15 | 16 | 19 | 176 |
| OA: 29.84% | |||||||||||
| kappa: 0.23% | |||||||||||
| (B) SVM = S2 | |||||||||||
| Class | AV | BN | BS | GV | MN | MG | PT | ST | WB | WV | Total |
| AV | 16 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 18 |
| BN | 0 | 16 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 1 | 19 |
| BS | 0 | 0 | 14 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 15 |
| GV | 1 | 1 | 0 | 11 | 0 | 1 | 0 | 0 | 0 | 0 | 14 |
| MN | 0 | 1 | 1 | 0 | 28 | 1 | 0 | 0 | 0 | 0 | 31 |
| MG | 0 | 0 | 0 | 1 | 1 | 11 | 0 | 0 | 0 | 0 | 13 |
| PT | 0 | 1 | 0 | 0 | 1 | 0 | 13 | 0 | 0 | 0 | 15 |
| BU | 2 | 0 | 1 | 1 | 0 | 0 | 0 | 10 | 0 | 0 | 13 |
| WB | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 13 | 0 | 15 |
| WV | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 22 | 23 |
| Total | 20 | 20 | 16 | 14 | 33 | 15 | 13 | 10 | 13 | 23 | 176 |
| OA: 87% | |||||||||||
| kappa: 86.89% | |||||||||||
| (C) RF-S2 SELECTED | |||||||||||
| Class | AV | BN | BS | GV | MN | MG | PT | ST | WB | WV | Total |
| AV | 15 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 18 |
| BN | 0 | 16 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 1 | 19 |
| BS | 0 | 0 | 12 | 2 | 1 | 1 | 0 | 0 | 0 | 0 | 15 |
| GV | 0 | 1 | 0 | 7 | 5 | 1 | 0 | 0 | 0 | 0 | 14 |
| MN | 0 | 2 | 2 | 4 | 18 | 5 | 0 | 0 | 0 | 0 | 31 |
| MG | 0 | 1 | 0 | 0 | 4 | 7 | 1 | 0 | 0 | 0 | 13 |
| PT | 0 | 1 | 0 | 0 | 2 | 1 | 9 | 1 | 0 | 0 | 15 |
| BU | 2 | 0 | 0 | 0 | 0 | 1 | 1 | 9 | 0 | 0 | 13 |
| WB | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 12 | 0 | 15 |
| WV | 0 | 1 | 0 | 1 | 0 | 4 | 0 | 0 | 0 | 17 | 23 |
| Total | 17 | 22 | 14 | 15 | 32 | 22 | 11 | 13 | 12 | 18 | 176 |
| OA = 69.33% | |||||||||||
| Kappa = 69% | |||||||||||
| (D) SVM-S1S2 | |||||||||||
| Class | AV | BN | BS | GV | MN | MG | PT | ST | WB | WV | Total |
| AV | 16 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 18 |
| BN | 0 | 17 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 19 |
| BS | 0 | 0 | 13 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 15 |
| GV | 1 | 1 | 0 | 11 | 0 | 1 | 0 | 0 | 0 | 0 | 14 |
| MN | 0 | 0 | 1 | 1 | 28 | 1 | 0 | 0 | 0 | 0 | 31 |
| MG | 0 | 0 | 0 | 2 | 1 | 10 | 0 | 0 | 0 | 0 | 13 |
| PT | 0 | 1 | 0 | 0 | 1 | 1 | 12 | 0 | 0 | 0 | 15 |
| BU | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 12 | 0 | 0 | 13 |
| WB | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 13 | 0 | 15 |
| WV | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 22 | 23 |
| Total | 19 | 20 | 14 | 14 | 33 | 16 | 12 | 12 | 13 | 23 | 176 |
| OA = 87.01% | |||||||||||
| Kappa = 0.87 | |||||||||||
| (E) SVM-S1S2 SELECTED | |||||||||||
| Class | AV | BN | BS | GV | MN | MG | PT | ST | WB | WV | Total |
| AV | 17 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 18 |
| BN | 0 | 17 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 19 |
| BS | 0 | 0 | 13 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 15 |
| GV | 1 | 1 | 0 | 11 | 0 | 1 | 0 | 0 | 0 | 0 | 14 |
| MN | 0 | 0 | 0 | 1 | 29 | 1 | 0 | 0 | 0 | 0 | 31 |
| MG | 0 | 0 | 0 | 0 | 1 | 12 | 0 | 0 | 0 | 0 | 13 |
| PT | 0 | 1 | 0 | 0 | 1 | 0 | 13 | 0 | 0 | 0 | 15 |
| BU | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 12 | 0 | 0 | 13 |
| WB | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 15 | 0 | 15 |
| WV | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 22 | 23 |
| Total | 19 | 20 | 13 | 12 | 32 | 17 | 13 | 12 | 15 | 23 | 176 |
| OA = 91.63% | |||||||||||
| Kappa = 0.91% | |||||||||||
| (a) RF User’s Accuracy (%) | (b) RF Producer’s accuracy (%) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Class | S1 | S2 | S2 VI | S1S2 | S1S2 VI | S1 | S2 | S2 VI | S1S2 | S1S2 VI |
| AV | 18.57 | 87.32 | 44.16 | 71.08 | 93.75 | 19.12 | 77.50 | 49.28 | 73.75 | 75.00 |
| BN | 40.00 | 75.71 | 62.5 | 78.75 | 88.06 | 28.57 | 76.81 | 67.90 | 91.30 | 85.51 |
| BS | 18.18 | 84.48 | 82.35 | 89.09 | 90.74 | 17.39 | 89.09 | 91.30 | 89.09 | 89.06 |
| GV | 19.05 | 80.00 | 60.87 | 86.59 | 79.79 | 24.00 | 81.93 | 66.67 | 84.52 | 90.36 |
| MN | 15.28 | 75.58 | 50.00 | 74.67 | 85.91 | 16.92 | 79.27 | 45.83 | 68.29 | 86.84 |
| MG | 23.73 | 74.19 | 80.00 | 65.96 | 66.67 | 29.17 | 47.92 | 61.54 | 64.58 | 75.56 |
| PT | 27.69 | 92.06 | 50.00 | 96.72 | 93.75 | 35.29 | 95.08 | 84.31 | 96.72 | 98.36 |
| BU | 34.88 | 79.22 | 82.14 | 93.33 | 90.63 | 27.78 | 89.71 | 82.14 | 82.35 | 86.57 |
| WB | 93.88 | 98.11 | 96.00 | 91.53 | 96.30 | 86.79 | 95.63 | 96.00 | 100.00 | 96.30 |
| WV | 100.00 | 99.06 | 100.00 | 100.00 | 100.00 | 17.65 | 93.15 | 100.00 | 87.67 | 94.52 |
| (a) SVM User’s accuracy (%) | (b) SVM Producer’s accuracy (%) | |||||||||
| Class | S1 | S2 | S2 VI | S1S2 | S1S2 VI | S1 | S2 | S2 VI | S1S2 | S1S2 VI |
| AV | 17.74 | 38.71 | 44.87 | 83.75 | 94.67 | 32.35 | 39.71 | 50.72 | 83.75 | 94.67 |
| BN | 38.96 | 67.65 | 64.71 | 85.14 | 88.73 | 38.96 | 59.74 | 67.90 | 91.30 | 88.33 |
| BS | 23.08 | 84.91 | 87.76 | 94.64 | 94.55 | 13.04 | 96.53 | 93.48 | 93.36 | 90.00 |
| GV | 23.89 | 50.67 | 84.31 | 93.6 | 87.78 | 50.00 | 76.00 | 76.79 | 91.67 | 96.3 |
| MN | 14.58 | 52.63 | 55.10 | 72.94 | 94.59 | 11.48 | 45.45 | 64.29 | 75.61 | 95.18 |
| MG | 0.00 | 57.58 | 52.00 | 80.00 | 85.11 | 0.00 | 39.58 | 54.17 | 66.67 | 92.11 |
| PT | 20.83 | 85.11 | 74.07 | 95.08 | 93.00 | 29.41 | 78.43 | 76.79 | 95.08 | 88.89 |
| BU | 29.09 | 74.24 | 91.11 | 93.85 | 95.00 | 15.69 | 90.74 | 80.39 | 89.71 | 98.36 |
| WB | 34.61 | 100.00 | 94.12 | 94.74 | 97.36 | 34.91 | 97.26 | 88.89 | 94.52 | 85.07 |
| WV | 0.00 | 100.00 | 100.00 | 100.00 | 100.00 | 0.00 | 79.33 | 74.07 | 100.00 | 98.63 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chabalala, Y.; Adam, E.; Ali, K.A. Machine Learning Classification of Fused Sentinel-1 and Sentinel-2 Image Data towards Mapping Fruit Plantations in Highly Heterogenous Landscapes. Remote Sens. 2022, 14, 2621. https://doi.org/10.3390/rs14112621
Chabalala Y, Adam E, Ali KA. Machine Learning Classification of Fused Sentinel-1 and Sentinel-2 Image Data towards Mapping Fruit Plantations in Highly Heterogenous Landscapes. Remote Sensing. 2022; 14(11):2621. https://doi.org/10.3390/rs14112621
Chicago/Turabian StyleChabalala, Yingisani, Elhadi Adam, and Khalid Adem Ali. 2022. "Machine Learning Classification of Fused Sentinel-1 and Sentinel-2 Image Data towards Mapping Fruit Plantations in Highly Heterogenous Landscapes" Remote Sensing 14, no. 11: 2621. https://doi.org/10.3390/rs14112621
APA StyleChabalala, Y., Adam, E., & Ali, K. A. (2022). Machine Learning Classification of Fused Sentinel-1 and Sentinel-2 Image Data towards Mapping Fruit Plantations in Highly Heterogenous Landscapes. Remote Sensing, 14(11), 2621. https://doi.org/10.3390/rs14112621